ส่วนใหญ่จะถูกกำหนดโดยวิธีการเปิดขดลวดกระตุ้น มอเตอร์ไฟฟ้ามีความโดดเด่นขึ้นอยู่กับสิ่งนี้:
1. ด้วยแรงกระตุ้นอิสระ: ขดลวดกระตุ้นถูกขับเคลื่อนโดยแหล่งภายนอก กระแสตรง(เร้าหรือวงจรเรียงกระแส)
2. กับ การกระตุ้นแบบขนาน : ขดลวดสนามเชื่อมต่อขนานกับขดลวดกระดอง
3. : ขดลวดสนามเชื่อมต่อแบบอนุกรมกับขดลวดกระดอง
4. ด้วยความตื่นเต้นผสม: มีขดลวดกระตุ้นสองอัน อันหนึ่งต่อขนานกับขดลวดกระดอง และอีกอันเป็นอนุกรมด้วย
มอเตอร์ไฟฟ้าเหล่านี้ทั้งหมดมีอุปกรณ์เดียวกันและแตกต่างกันเฉพาะในการใช้ขดลวดกระตุ้น ขดลวดกระตุ้นของมอเตอร์ไฟฟ้าเหล่านี้ดำเนินการในลักษณะเดียวกับที่ทำ
มอเตอร์ไฟฟ้า กระแสตรงด้วยแรงกระตุ้นอิสระ
ในมอเตอร์ไฟฟ้านี้ (รูปที่ 1, a) ขดลวดกระดองเชื่อมต่อกับแหล่งจ่ายกระแสตรงหลัก (เครือข่าย DC เครื่องกำเนิดไฟฟ้าหรือวงจรเรียงกระแส) ด้วยแรงดันไฟฟ้า U และขดลวดกระตุ้นเชื่อมต่อกับแหล่งเสริมด้วยแรงดันไฟฟ้า UB รีโอสแตตควบคุม Rrv รวมอยู่ในวงจรขดลวดกระตุ้น และรีโอสแตท Rn สตาร์ทจะรวมอยู่ในวงจรขดลวดของกระดอง
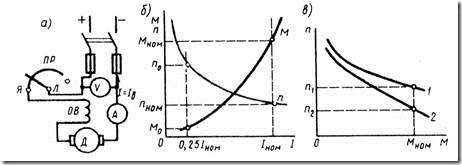
ตัวปรับค่าปรับไฟฟ้าใช้เพื่อควบคุมความเร็วในการหมุนของกระดองของมอเตอร์ และตัวปรับอุณหภูมิเริ่มต้นใช้เพื่อจำกัดกระแสในขดลวดของกระดองระหว่างการสตาร์ทเครื่อง ลักษณะเฉพาะมอเตอร์ไฟฟ้าคือกระแสกระตุ้น Iv ไม่ขึ้นอยู่กับกระแส Ii ในขดลวดกระดอง (กระแสโหลด) ดังนั้นโดยละเลยผลการล้างอำนาจแม่เหล็กของปฏิกิริยากระดอง เราสามารถสรุปได้ว่าฟลักซ์ของมอเตอร์ Ф ไม่ได้ขึ้นอยู่กับโหลด การพึ่งพาของแรงบิดแม่เหล็กไฟฟ้า M และความเร็วในการหมุน n บน Il ปัจจุบันจะเป็นเส้นตรง (รูปที่ 2, a) ดังนั้นลักษณะทางกลของเครื่องยนต์ก็จะเป็นเส้นตรง - การพึ่งพา n (M) (รูปที่ 2, b)
ในกรณีที่ไม่มีลิโน่ที่มีความต้านทาน Rn ในวงจรกระดอง ความเร็วและลักษณะทางกลจะแข็ง กล่าวคือ มีมุมเอียงเล็กน้อยไปยังแกนนอน เนื่องจากแรงดันตก IаΣRя ในขดลวดของเครื่องที่รวมอยู่ในวงจรกระดองที่ พิกัดโหลดเพียง 3-5 % ของ Unom ลักษณะเหล่านี้ (เส้นตรง 1 ในรูปที่ 2, a และ b) เรียกว่าเป็นธรรมชาติ เมื่อลิโน่ที่มีความต้านทาน Rn รวมอยู่ในวงจรกระดอง ความชันของคุณสมบัติเหล่านี้จะเพิ่มขึ้น อันเป็นผลมาจากการที่มันเป็นไปได้ที่จะได้รับตระกูลของคุณสมบัติของลิโน่ 2, 3 และ 4 ซึ่งสอดคล้องกับ ความหมายต่างกัน Rn1, Rn2 และ Rn3
ข้าว. 1. แผนผังไดอะแกรมของมอเตอร์ไฟฟ้า กระแสตรงด้วยแรงกระตุ้นอิสระ (a) และขนาน (b)
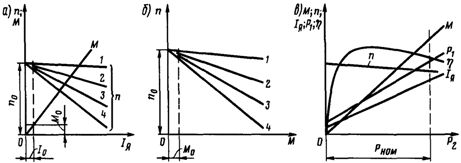
ข้าว. 2. ลักษณะของมอเตอร์ไฟฟ้า กระแสตรงด้วยแรงกระตุ้นที่เป็นอิสระและขนาน: a - ความเร็วสูงและแรงบิด, b - กลไก, c - การทำงาน ต้านทานมากขึ้น Rn ยิ่งมุมเอียงของลักษณะ rheostatic มากเท่าไหร่ นั่นคือ ยิ่งมีความนุ่มนวลมากขึ้นเท่านั้น
รีโอสแตทที่ปรับ Rpv ช่วยให้คุณเปลี่ยนกระแสกระตุ้นของมอเตอร์ Ib และฟลักซ์แม่เหล็ก Ф ในกรณีนี้ ความเร็วในการหมุน n ก็จะเปลี่ยนไปเช่นกัน
ไม่มีการติดตั้งสวิตช์และฟิวส์ในวงจรขดลวดกระตุ้นเนื่องจากเมื่อวงจรนี้แตกฟลักซ์แม่เหล็กของมอเตอร์ไฟฟ้าจะลดลงอย่างรวดเร็ว (มีเพียงฟลักซ์จากสนามแม่เหล็กที่เหลืออยู่เท่านั้นที่ยังคงอยู่) และโหมดฉุกเฉินก็เกิดขึ้น หากมอเตอร์ไฟฟ้าทำงานที่รอบเดินเบาหรือมีภาระเล็กน้อยบนเพลา ความเร็วจะเพิ่มขึ้นอย่างรวดเร็ว (เครื่องยนต์ทำงานอย่างดุดัน) ในกรณีนี้กระแสไฟในขดลวดกระดอง Ia จะเพิ่มขึ้นอย่างมากและอาจเกิดไฟไหม้รอบด้าน เพื่อหลีกเลี่ยงปัญหานี้ การป้องกันจะต้องถอดมอเตอร์ออกจากแหล่งพลังงาน
ความเร็วในการหมุนที่เพิ่มขึ้นอย่างรวดเร็วเมื่อวงจรของขดลวดกระตุ้นแตกถูกอธิบายโดยข้อเท็จจริงที่ว่าในกรณีนี้ฟลักซ์แม่เหล็ก Ф ลดลงอย่างรวดเร็ว (ตามค่าของฟลักซ์ฟลักซ์จากสนามแม่เหล็กที่เหลือ) และ e ดีเอส E และ Iya ปัจจุบันเพิ่มขึ้น และเนื่องจากแรงดันไฟฟ้าที่ใช้ U ยังคงไม่เปลี่ยนแปลง ความเร็วในการหมุน n จะเพิ่มขึ้นจนถึง e ดีเอส E จะไม่ถึงค่าประมาณเท่ากับ U (ซึ่งจำเป็นสำหรับสภาวะสมดุล วงจรไฟฟ้าสมอซึ่ง E= U - IаΣRя.
เมื่อโหลดบนเพลาใกล้กับค่าที่กำหนด มอเตอร์ไฟฟ้าจะหยุดในกรณีที่วงจรกระตุ้นแตกเนื่องจาก โมเมนต์แม่เหล็กไฟฟ้าซึ่งมอเตอร์สามารถพัฒนาได้ด้วยฟลักซ์แม่เหล็กที่ลดลงอย่างมีนัยสำคัญ ลดลงและกลายเป็นน้อยกว่าแรงบิดโหลดบนเพลา ในกรณีนี้ Ia ปัจจุบันก็เพิ่มขึ้นอย่างรวดเร็วเช่นกันและเครื่องจะต้องถูกตัดการเชื่อมต่อจากแหล่งพลังงาน
ควรสังเกตว่าความเร็วในการหมุน n0 สอดคล้องกับรอบเดินเบาในอุดมคติเมื่อเครื่องยนต์ไม่ใช้พลังงานไฟฟ้าจากเครือข่ายและแรงบิดแม่เหล็กไฟฟ้าเป็นศูนย์ ในสภาพจริง ในโหมดเดินเบา มอเตอร์จะใช้กระแสไฟเดินเบา I0 จากเครือข่าย ซึ่งจำเป็นต่อการชดเชย การสูญเสียภายในและพัฒนาชั่วขณะหนึ่ง M0 ที่จำเป็นในการเอาชนะแรงเสียดทานในเครื่อง ดังนั้น ในความเป็นจริง ความเร็วรอบเดินเบาจะน้อยกว่า n0
การพึ่งพาความเร็วการหมุน n และแรงบิดแม่เหล็กไฟฟ้า M ต่อกำลัง P2 (รูปที่ 2, c) บนเพลามอเตอร์ ตามความสัมพันธ์ที่พิจารณาแล้วจะเป็นเส้นตรง การพึ่งพาของกระดองที่คดเคี้ยวในปัจจุบัน Iya และกำลัง P1 บน P2 ก็เกือบจะเป็นเส้นตรงเช่นกัน Ia ปัจจุบันและกำลัง P1 ที่ P2 = 0 คือกระแสไฟที่ไม่มีการโหลด I0 และกำลัง P0 ที่ใช้ระหว่างที่ไม่มีโหลด เส้นโค้งประสิทธิภาพมีลักษณะทั่วไปของเครื่องจักรไฟฟ้าทั้งหมด
มอเตอร์ไฟฟ้า กระแสตรงด้วยแรงกระตุ้นคู่ขนาน
ในมอเตอร์ไฟฟ้านี้ (ดูรูปที่ 1, b) ขดลวดสนามและกระดองได้รับพลังงานจากแหล่งพลังงานไฟฟ้าเดียวกันกับแรงดันไฟฟ้า U รีโอสแตตควบคุม Rpv จะรวมอยู่ในวงจรขดลวดกระตุ้นและรวมลิโน่สตาร์ท Rp ในวงจรขดลวดกระดอง
ในมอเตอร์ไฟฟ้าภายใต้การพิจารณาโดยพื้นฐานแล้ว แยกอาหารวงจรของขดลวดกระดองและขดลวดกระตุ้นซึ่งเป็นผลมาจากกระแสกระตุ้น Iv ไม่ได้ขึ้นอยู่กับกระแสของขดลวดกระดอง Iv ดังนั้นมอเตอร์กระตุ้นแบบขนานจะมีลักษณะเหมือนกับมอเตอร์กระตุ้นอิสระ อย่างไรก็ตาม มอเตอร์กระตุ้นแบบขนานจะทำงานอย่างถูกต้องเมื่อได้รับพลังงานจากแหล่งจ่ายกระแสตรงที่มีแรงดันไฟตรงคงที่เท่านั้น
เมื่อมอเตอร์ไฟฟ้าขับเคลื่อนจากแหล่งที่มีแรงดันไฟฟ้าแปรผัน (เครื่องกำเนิดไฟฟ้าหรือวงจรเรียงกระแสแบบควบคุม) แรงดันไฟที่จ่าย U ที่ลดลงจะทำให้กระแสกระตุ้น Iv และฟลักซ์แม่เหล็ก F ลดลงที่สอดคล้องกัน ซึ่งนำไปสู่การเพิ่มขึ้นของขดลวดกระดอง Ia ปัจจุบัน สิ่งนี้จำกัดความสามารถในการควบคุมความเร็วของกระดองโดยการเปลี่ยนแรงดันไฟฟ้าของแหล่งจ่าย U ดังนั้นมอเตอร์ไฟฟ้าที่ออกแบบให้ใช้พลังงานจากเครื่องกำเนิดไฟฟ้าหรือวงจรเรียงกระแสที่ควบคุมจะต้องตื่นเต้นอย่างอิสระ
มอเตอร์ไฟฟ้า กระแสตรงด้วยการกระตุ้นตามลำดับ
ในการจำกัดกระแสเมื่อสตาร์ทเครื่อง รีโอสแตทเริ่มต้น Rp จะรวมอยู่ในวงจรขดลวดกระดอง (รูปที่ 3, a) และเพื่อควบคุมความเร็ว รีโอสแตทแบบปรับ Rrv สามารถเชื่อมต่อขนานกับขดลวดกระตุ้นได้
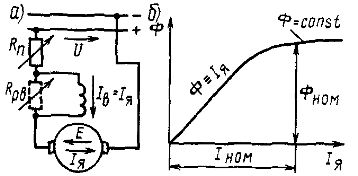
ข้าว. 3. แผนผังของมอเตอร์ไฟฟ้า กระแสตรงด้วยการกระตุ้นแบบอนุกรม (a) และการพึ่งพาฟลักซ์แม่เหล็ก Ф บน Iа ปัจจุบันในขดลวดกระดอง (b)
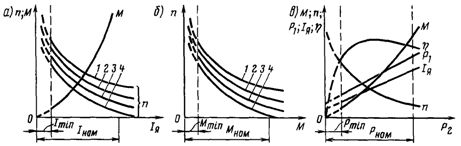
ข้าว. 4. ลักษณะของมอเตอร์ไฟฟ้า กระแสตรงด้วยการกระตุ้นตามลำดับ: a - ความเร็วสูงและแรงบิด, b - เครื่องกล, c - ผู้ปฏิบัติงาน
คุณลักษณะเฉพาะของมอเตอร์ไฟฟ้านี้คือกระแสกระตุ้น Iv เท่ากับหรือเป็นสัดส่วน (เมื่อเปิด rheostat Rpv) กับกระแสไฟฟ้าที่คดเคี้ยวของกระดอง Ia ดังนั้นฟลักซ์แม่เหล็ก Ф ขึ้นอยู่กับโหลดของมอเตอร์ (รูปที่ 3, ข ).
ด้วยกระแสขดลวดกระดอง I น้อยกว่า (0.8-0.9) จัดอันดับปัจจุบัน Inom ระบบแม่เหล็กของเครื่องไม่อิ่มตัวและเราสามารถสรุปได้ว่าฟลักซ์แม่เหล็ก Ф เปลี่ยนแปลงในสัดส่วนโดยตรงกับ Iа ปัจจุบัน ดังนั้นลักษณะความเร็วของมอเตอร์ไฟฟ้าจะอ่อน - เมื่อกระแสเพิ่มขึ้น Ith ความถี่ในการหมุน n จะลดลงอย่างรวดเร็ว (รูปที่ 4, a) การลดลงของความเร็วในการหมุน n เกิดขึ้นเนื่องจากการเพิ่มขึ้นของแรงดันไฟฟ้าตก IяΣRя ใน ความต้านทานภายในรยา. วงจรขดลวดกระดองเช่นเดียวกับการเพิ่มขึ้นของฟลักซ์แม่เหล็ก F.
โมเมนต์แม่เหล็กไฟฟ้า M ที่มีกระแส Ia เพิ่มขึ้นจะเพิ่มขึ้นอย่างรวดเร็ว เนื่องจากในกรณีนี้ฟลักซ์แม่เหล็ก F ก็เพิ่มขึ้นเช่นกัน กล่าวคือ โมเมนต์ M จะเป็นสัดส่วนกับ Ia ปัจจุบัน ดังนั้น ที่ Ia ปัจจุบันน้อยกว่า (0.8 N-0.9) Inom คุณลักษณะความเร็วมีรูปของไฮเปอร์โบลา และลักษณะโมเมนต์มีรูปพาราโบลา
ที่กระแส Il > Inom การพึ่งพาของ M และ n บน Il เป็นเส้นตรง เนื่องจากในโหมดนี้วงจรแม่เหล็กจะอิ่มตัวและฟลักซ์แม่เหล็ก Ф จะไม่เปลี่ยนแปลงเมื่อกระแส Il เปลี่ยนแปลง
ลักษณะทางกล กล่าวคือ การพึ่งพา n บน M (รูปที่ 4, b) สามารถสร้างขึ้นบนพื้นฐานของการพึ่งพา n และ M บน Ib นอกจากคุณสมบัติทางธรรมชาติ 1 แล้ว ยังเป็นไปได้ที่จะได้รับตระกูลของลักษณะรีโอสแตท 2, 3 และ 4 โดยรวมรีโอสแตทที่มีความต้านทาน Rp ในวงจรขดลวดกระดอง ลักษณะเหล่านี้สอดคล้องกับค่าต่างๆ ของ Rn1, Rn2 และ Rn3 ในขณะที่ Rn ที่ใหญ่กว่า คุณสมบัติที่ต่ำกว่า
ลักษณะทางกลของเครื่องยนต์ที่พิจารณานั้นนิ่มและมีลักษณะไฮเปอร์โบลิก ที่โหลดต่ำ ฟลักซ์แม่เหล็ก Ф ลดลงอย่างมาก ความเร็วในการหมุน n จะเพิ่มขึ้นอย่างรวดเร็วและอาจเกินค่าสูงสุดที่อนุญาต (เครื่องยนต์ไม่มีเกียร์) ดังนั้นเครื่องยนต์ดังกล่าวจึงไม่สามารถใช้ขับเคลื่อนกลไกที่ทำงานในโหมดปกติและที่โหลดต่ำได้ (เครื่องมือเครื่องจักร สายพานต่างๆ ฯลฯ)
มักจะน้อยที่สุด โหลดที่อนุญาตสำหรับมอเตอร์ไฟฟ้าขนาดใหญ่และขนาดกลาง (0.2 .... 0.25) Inom. เพื่อป้องกันไม่ให้เครื่องยนต์ทำงานโดยไม่มีโหลด เครื่องยนต์จึงเชื่อมต่ออย่างแน่นหนากับกลไกขับเคลื่อน (เกียร์หรือคลัตช์ตาบอด) การใช้สายพานหรือคลัตช์เสียดทานเป็นสิ่งที่ยอมรับไม่ได้
แม้จะมีข้อเสียเปรียบนี้ แต่มอเตอร์แบบซีรีส์ตื่นเต้นก็ถูกนำมาใช้กันอย่างแพร่หลาย โดยเฉพาะอย่างยิ่งเมื่อมีการเปลี่ยนแปลงกว้างของแรงบิดโหลดและสภาวะการสตาร์ทที่ยาก: ในทุกระบบขับเคลื่อนด้วยแรงฉุดลาก (หัวรถจักรไฟฟ้า, หัวรถจักรดีเซล, รถไฟฟ้า, รถยนต์ไฟฟ้า, รถยกไฟฟ้า ฯลฯ ) เช่นเดียวกับกลไกขับเคลื่อนการยกน้ำหนัก (เครน ลิฟต์ ฯลฯ)
สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าด้วยคุณลักษณะที่นุ่มนวล การเพิ่มแรงบิดของโหลดทำให้กระแสไฟและการใช้พลังงานเพิ่มขึ้นน้อยกว่ามอเตอร์ที่มีแรงกระตุ้นแบบอิสระและแบบขนาน ดังนั้นมอเตอร์ที่มีแรงกระตุ้นแบบอนุกรมจะทนต่อการโอเวอร์โหลดได้ดีกว่า นอกจากนี้ มอเตอร์เหล่านี้ยังมีแรงบิดเริ่มต้นที่มากกว่ามอเตอร์ที่มีแรงกระตุ้นแบบขนานและอิสระ เนื่องจากการเพิ่มขึ้นของกระแสขดลวดของกระดองเมื่อเริ่มทำงาน ฟลักซ์แม่เหล็กก็เพิ่มขึ้นเช่นกัน
ตัวอย่างเช่น หากเรายอมรับว่ากระแสเริ่มต้นระยะสั้นสามารถเป็น 2 เท่าของกระแสการทำงานที่กำหนดของเครื่อง และละเลยผลกระทบของความอิ่มตัว ปฏิกิริยาของเกราะและแรงดันไฟฟ้าตกในวงจรของขดลวด จากนั้นใน มอเตอร์ที่มีการกระตุ้นแบบอนุกรม แรงบิดเริ่มต้นจะมากกว่าค่าปกติ 4 เท่า (ในทั้งกระแสและฟลักซ์แม่เหล็กเพิ่มขึ้น 2 เท่า) และในเครื่องยนต์ที่มีแรงกระตุ้นแบบอิสระและแบบขนาน - มากกว่า 2 เท่าเท่านั้น
ในความเป็นจริง เนื่องจากความอิ่มตัวของวงจรแม่เหล็ก ฟลักซ์แม่เหล็กจึงไม่เพิ่มขึ้นตามสัดส่วนกระแส แต่ยังคงแรงบิดเริ่มต้นของมอเตอร์ที่มีการกระตุ้นแบบอนุกรม สิ่งอื่น ๆ ที่เท่ากันทั้งหมดจะมากกว่าแรงบิดเริ่มต้นอย่างมีนัยสำคัญ ของมอเตอร์ตัวเดียวกันที่มีแรงกระตุ้นแบบอิสระหรือแบบขนาน
การพึ่งพาของ n และ M ต่อกำลัง P2 บนเพลามอเตอร์ (รูปที่ 4, c) ดังต่อไปนี้จากข้อกำหนดข้างต้นเป็นแบบไม่เป็นเชิงเส้น การขึ้นต่อกันของ P1, Ip และ η บน P2 มีรูปร่างเหมือนกัน มอเตอร์ที่มีการกระตุ้นแบบขนาน
มอเตอร์ไฟฟ้า กระแสตรงด้วยความตื่นเต้นผสม
ในมอเตอร์ไฟฟ้านี้ (รูปที่ 5, a) ฟลักซ์แม่เหล็ก Ф ถูกสร้างขึ้นจากการกระทำร่วมกันของขดลวดกระตุ้นสองอัน - ขนาน (หรืออิสระ) และอนุกรมซึ่งกระแสกระตุ้น Iv1 และ Iv2 \u003d Ib
นั่นเป็นเหตุผลที่
![]()
โดยที่ Фposl คือฟลักซ์แม่เหล็กของขดลวดแบบอนุกรม ขึ้นอยู่กับ Il ปัจจุบัน Фpar คือฟลักซ์แม่เหล็กของขดลวดคู่ขนาน ซึ่งไม่ได้ขึ้นอยู่กับโหลด (กำหนดโดยกระแสกระตุ้น Iв1)
ลักษณะทางกลของมอเตอร์ไฟฟ้าที่มีแรงกระตุ้นแบบผสม (รูปที่ 5, b) อยู่ระหว่างลักษณะของเครื่องยนต์ที่มีแรงกระตุ้นแบบขนาน (เส้นตรง 1) และแบบอนุกรม (ส่วนโค้ง 2) ขึ้นอยู่กับอัตราส่วนของแรงแม่เหล็กของขดลวดคู่ขนานและแบบอนุกรมในโหมดระบุ เป็นไปได้ที่จะประมาณลักษณะของมอเตอร์ที่มีการกระตุ้นแบบผสมให้มีลักษณะเฉพาะ 1 (เส้นโค้ง 3 ที่มี ppm ต่ำของขดลวดแบบอนุกรม) หรือตามลักษณะเฉพาะ 2 (โค้ง 4 สำหรับ ppm เล็ก) พร้อมขดลวดขนาน)
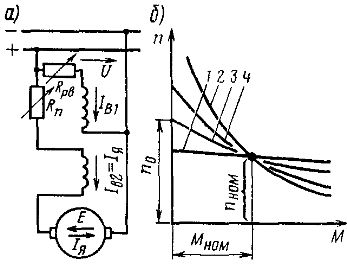
ข้าว. 5. แผนผังของมอเตอร์ไฟฟ้าที่มีการกระตุ้นแบบผสม (a) และลักษณะทางกลของมอเตอร์ไฟฟ้า (b)
ข้อดีของเครื่องยนต์ กระแสตรงด้วยแรงกระตุ้นแบบผสม คือ มีคุณสมบัติเชิงกลที่นุ่มนวล สามารถทำงานที่ไม่ได้ใช้งาน เมื่อ Fposl = 0 ในโหมดนี้ ความถี่ของการหมุนของกระดองจะถูกกำหนดโดยฟลักซ์แม่เหล็ก Фpar และมีค่าจำกัด (เครื่องยนต์ไม่ทำงาน)
[เอกสาร]1.doc
การบ้าน #2(โมดูล 5)
“มอเตอร์กระแสตรงพร้อมชุดกระตุ้น การกำหนดองค์ประกอบ หลักการทำงาน"
gr.TP-07
Asmolkova O. A.
ฉันภาคเรียนปี 2552
มอเตอร์กระแสตรงพร้อมชุดกระตุ้น การกำหนดองค์ประกอบ หลักการทำงาน
1. อุปกรณ์และวัตถุประสงค์ขององค์ประกอบของมอเตอร์กระแสตรง
.
มอเตอร์กระแสตรง - เครื่องไฟฟ้า , เครื่อง DC, แปลงร่าง พลังงานไฟฟ้า DC ใน พลังงานกล. ประกอบด้วยสเตเตอร์แบบตายตัวพร้อมเสาและโรเตอร์หมุน (กระดอง) เช่นเดียวกับเครื่อง DC ทั้งหมดที่มีตัวสะสม
สเตเตอร์ เครื่อง DC ประกอบด้วยโครงทรงกระบอก (เคส) เสาที่มีขดลวดกระตุ้นและตัวป้องกันปลาย ( ข้าว. 2.1.) บนเตียง เสาหลัก (หลัก) ได้รับการเสริมความแข็งแกร่งเพื่อกระตุ้นฟลักซ์แม่เหล็กหลักและเสาเพิ่มเติมเพื่อปรับปรุงการสลับในมอเตอร์ เสาหลักประกอบด้วยแกนเสาที่ทำจากเหล็กแผ่นและยึดกับโครง และขดลวดกระตุ้น แกนกลางที่ปลายอิสระมีชิ้นส่วนขั้วเพื่อสร้างการกระจายตัวตามที่ต้องการของการเหนี่ยวนำแม่เหล็กตามเส้นรอบวงของกระดอง เตียง 3 คือแอกของเครื่องนั่นคือส่วนที่ปิดวงจรแม่เหล็กของฟลักซ์หลัก Ф มันทำจากเหล็กหล่อเนื่องจากฟลักซ์แม่เหล็กในนั้นค่อนข้างคงที่ มีการติดตั้งเสาเพิ่มเติมบนเฟรมระหว่างเสาหลัก ขดลวดของพวกเขาเชื่อมต่อเป็นอนุกรมกับขดลวดกระดอง จุดประสงค์ของเสาเหล่านี้คือการสร้างสนามแม่เหล็กเพิ่มเติม นี่เป็นสิ่งจำเป็นเพื่อไม่ให้แปรงบนตัวสะสมเป็นประกาย
สมอ (โรเตอร์) เรียกว่าส่วนของเครื่องในขดลวดซึ่งเมื่อมันหมุนสัมพันธ์กับหลัก สนามแม่เหล็ก EMF ถูกเหนี่ยวนำ สมอ 5 มอเตอร์กระแสตรงประกอบด้วยเพลาเหล็ก แกนฟันเหล็ก ขดลวดที่วางอยู่ในร่อง และตัวสะสมที่ติดตั้งบนเพลากระดอง ( ข้าว. 2.1.) ขดลวดสนามมีความจำเป็นเพื่อให้แน่ใจว่ามีปฏิสัมพันธ์ที่เหมาะสมระหว่างสนามแม่เหล็กของโรเตอร์และสเตเตอร์ (เช่น create ช่วงเวลาสูงสุดบนโรเตอร์) ส่วนที่เป็นลักษณะเฉพาะของเครื่องยนต์ (หรือใดๆ เครื่องไฟฟ้า) DC เป็นตัวสะสม นี่คือทรงกระบอกกลวงที่ประกอบขึ้นจากแผ่นทองแดงรูปลิ่มที่แยกจากกัน เพลตท่อร่วมยังหุ้มฉนวนจากเพลามอเตอร์ด้วย พวกเขาเชื่อมต่อกันด้วยตัวนำกับเกลียวที่คดเคี้ยวที่วางอยู่ในร่องของกระดอง ขดลวดหมุนเชื่อมต่อกับวงจรภายนอกโดยการสัมผัสแบบเลื่อนระหว่างแปรงและตัวสับเปลี่ยน ตัวสะสมในเครื่อง DC ทำหน้าที่แก้ไขตัวแปร EMF ที่เหนี่ยวนำในขดลวดกระดองหมุน และเพื่อให้ได้โมเมนต์แม่เหล็กไฟฟ้าที่คงที่ในทิศทาง
ข้าว. 2. 1. อุปกรณ์มอเตอร์กระแสตรง:
1 - ขดลวดกระตุ้น;2 - เสา;3 - เตียง;4 - ปลายเสา;5 - สมอ;6 - ตัวนำขดลวดสมอ;
7 - แกนสมอฟัน8 - ช่องว่างอากาศเครื่อง
2. หลักการทำงานของมอเตอร์กระแสตรง
2.1 ข้อมูลทั่วไป
เมื่อขดลวดกระดองหมุนในสนามแม่เหล็กคงที่ EMF ตัวแปรจะเหนี่ยวนำให้เกิดการเปลี่ยนแปลงตามความถี่:
ที่ไหน น- ความเร็วในการหมุนของเกราะ
เมื่ออาร์เมเจอร์หมุน ตัวแปร EMF จะทำหน้าที่ระหว่างจุดสองจุดใดๆ ของขดลวดกระดอง อย่างไรก็ตาม ระหว่างแปรงสัมผัสคงที่ ค่าคงที่ EMF ในขนาดและทิศทาง อีเท่ากับผลรวมของค่าทันทีของ EMF ที่เหนี่ยวนำให้เกิดการหมุนรอบที่เชื่อมต่อแบบอนุกรมทั้งหมดของเกราะที่อยู่ระหว่างแปรงเหล่านี้
การพึ่งพา EMF อีจากฟลักซ์แม่เหล็กของเครื่องและความเร็วในการหมุนของกระดองมีรูปแบบ:
เมื่อเชื่อมต่อขดลวดกระดองกับเครือข่ายด้วยแรงดันไฟฟ้า ยู, EMF อีจะเท่ากับแรงดันไฟฟ้าโดยประมาณ ยูและความเร็วของโรเตอร์:
ดังนั้น เนื่องจากการมีอยู่ของตัวสะสม เมื่อเครื่อง DC ทำงานในโหมดมอเตอร์ ความเร็วของโรเตอร์ไม่สัมพันธ์กับความถี่ไฟหลักอย่างเคร่งครัด แต่สามารถเปลี่ยนแปลงได้ในช่วงกว้างโดยการเปลี่ยนแรงดันไฟฟ้า ยูและฟลักซ์แม่เหล็ก F. แกนสมมาตรที่แยกขั้วของเครื่อง DC เรียกว่าเป็นกลางทางเรขาคณิต
ด้วยวงจรภายนอกแบบเปิด กระแสในขดลวดกระดองจะไม่ไหล เนื่องจาก EMF ที่เกิดขึ้นในสองส่วนของขดลวดกระดองที่อยู่ทั้งสองด้านของความเป็นกลางทางเรขาคณิตจะพุ่งไปในทิศทางตรงกันข้ามและชดเชยซึ่งกันและกัน เพื่อที่จะจ่ายแรงดันไฟฟ้าสูงสุดจากขดลวดกระดองไปยังวงจรภายนอก วงจรนี้จะต้องเชื่อมต่อกับจุดสองจุดของขดลวดกระดอง ซึ่งระหว่างจุดที่มีความต่างศักย์สูงสุดจะทำงาน ซึ่งควรติดตั้งแปรง เมื่อกระดองหมุน จุดจะเคลื่อนจากความเป็นกลางทางเรขาคณิต แต่จุดม้วนใหม่จะเข้าใกล้แปรงมากขึ้นเรื่อยๆ ซึ่งระหว่างที่ EMF ทำหน้าที่ อีดังนั้น EMF ในวงจรภายนอกจะไม่เปลี่ยนแปลงในขนาดและทิศทาง เพื่อลดการกระเพื่อมของ EMF ระหว่างการเปลี่ยนแปรงจากแผ่นสะสมหนึ่งไปยังอีกแผ่นหนึ่ง โดยปกติแล้ว ตัวนำแบบแอคทีฟอย่างน้อย 16 ตัวมักจะรวมอยู่ในกิ่งคู่ขนานของขดลวดกระดอง
บนกระดองผ่านขดลวดซึ่งกระแสไหล ฉัน, โมเมนต์แม่เหล็กไฟฟ้าทำหน้าที่:
เมื่อเครื่องทำงานในโหมดมอเตอร์ แรงบิดแม่เหล็กไฟฟ้าจะหมุน
2.2 ปฏิกิริยากระดองมอเตอร์กระแสตรง
ที่รอบเดินเบา ฟลักซ์แม่เหล็กในเครื่องยนต์ถูกสร้างขึ้นโดยHC .เท่านั้น ^Fในขดลวดกระตุ้น ในกรณีนี้ ฟลักซ์แม่เหล็ก F ในด้วยช่องว่างอากาศคงที่ระหว่างเกราะและแกนของเสาหลัก (ซึ่งเป็นเรื่องปกติสำหรับเครื่อง DC หลายเครื่อง) มันถูกกระจายอย่างสมมาตรตามแกนตามยาวของเครื่องจักร
เมื่อเครื่องทำงานภายใต้โหลด กระแสจะไหลผ่านขดลวดกระดอง และ NS ของกระดองจะสร้างสนามแม่เหล็กของตัวเอง ผลกระทบของสนามเกราะต่อสนามแม่เหล็กของเครื่องเรียกว่า ปฏิกิริยาสมอ. สนามแม่เหล็ก F aqสร้างโดย na anchor F aqในเครื่องสองขั้วเมื่อติดตั้งแปรงที่เป็นกลางก็จะถูกนำไป แกนตามขวางเครื่องดังนั้นสนามแม่เหล็กของกระดองจึงเรียกว่าขวาง อันเป็นผลมาจากการไหล F aq การกระจายสมมาตรของสนามแม่เหล็กของเครื่องจะบิดเบี้ยวและฟลักซ์ที่เป็นผลลัพธ์ F ตัดจะกระจุกตัวอยู่ที่ขอบเสาหลักเป็นหลัก ในกรณีนี้ ความเป็นกลางทางกายภาพ BB(เส้นที่เชื่อมต่อจุดของวงกลมกระดองที่การเหนี่ยวนำเป็นศูนย์) จะถูกแทนที่เมื่อเทียบกับเรขาคณิต เป็นกลางในบางมุม β (รูปที่.2.2). ในมอเตอร์ ความเป็นกลางทางกายภาพจะถูกแทนที่โดยขัดกับทิศทางการหมุน
ตามกฎหมาย เต็มปัจจุบันกระดอง NS ซึ่งทำหน้าที่ในช่องว่างอากาศที่ระยะ x จากแกนของเสาหลักถูกกำหนดโดยนิพจน์:
ดังนั้น อสม. F aqแปรผันเป็นเส้นตรงตามเส้นรอบวง ใต้เสาหลักมีค่าเท่ากับศูนย์ และ ณ จุดที่ติดตั้งแปรงจะมีค่าสูงสุด การเหนี่ยวนำแม่เหล็กในอากาศ
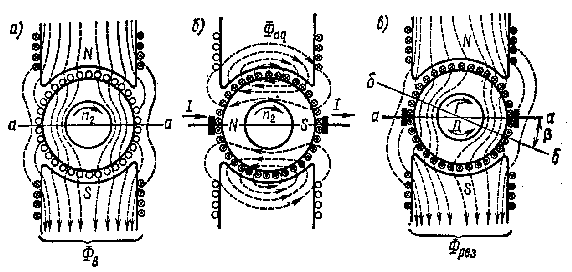
^ รูปที่ 2.2 - สนามแม่เหล็กของมอเตอร์กระแสตรง: a) จากขดลวดกระตุ้น; b) จากขดลวดกระดอง; c) ผลลัพธ์ (F ใน - ฟลักซ์แม่เหล็กที่ x.x.; F aq - ฟลักซ์แม่เหล็กที่สร้างขึ้นโดยกระดอง NS F ตัด - กระแสผลลัพธ์; a-a - เรขาคณิตที่เป็นกลาง bb - เป็นกลางทางกายภาพ β – มุมการกระจัดที่เป็นกลาง bb)
การกวาดล้างด้วยระบบแม่เหล็กไม่อิ่มตัว:
ค่าของช่องว่างอากาศที่จุด x อยู่ที่ไหน
2.3 แรงบิดของมอเตอร์กระแสตรง
หากสนามที่คดเคี้ยวและเกราะของมอเตอร์เชื่อมต่อกับเครือข่าย DC ด้วยแรงดันไฟฟ้า ^คุณแล้วมีแรงบิดแม่เหล็กไฟฟ้า เอ็ม เอม. แรงบิดที่มีประโยชน์ เอ็มบนเพลามอเตอร์มีค่าน้อยกว่าแม่เหล็กไฟฟ้าโดยค่าของโมเมนต์ตอบโต้ที่สร้างขึ้นในเครื่องโดยแรงเสียดทานและเท่ากับโมเมนต์ เอ็ม Xในโหมด x.x. เช่น ม = ม เอม -M X .
แรงบิดเริ่มต้นมอเตอร์ต้องมากกว่าเบรกสถิต เอ็ม t ในสถานะที่เหลือของโรเตอร์ มิฉะนั้น เกราะของมอเตอร์จะไม่เริ่มหมุน อยู่ในสภาวะคงตัว (ที่ n = const) มีความสมดุลของการหมุน M และช่วงเวลาเบรก M t:
ม = ม เอม – เอ็ม X = เอ็ม t
เป็นที่ทราบกันดีจากกลศาสตร์ว่า พลังงานกลเครื่องยนต์สามารถแสดงในรูปของแรงบิดและความเร็วเชิงมุม
ดังนั้นแรงบิดที่เป็นประโยชน์ของเครื่องยนต์ ^เอ็ม(N m) แสดงในรูปของกำลังสุทธิ R(kW) และความเร็ว น(รอบต่อนาที)
M=9550P/n
มาพูดคุยกันถึงประเด็นสำคัญบางประการในการสตาร์ทและใช้งานมอเตอร์กระแสตรง จากสมการสภาวะไฟฟ้าของเครื่องยนต์ จะได้ว่า
ฉัน ฉัน = (U -- E)/R ฉัน
ในโหมดการทำงาน เกราะปัจจุบัน I I ถูกจำกัด e ดีเอส อี, ถ้า n มีค่าประมาณเท่ากับ น ชื่อ. ในขณะที่เปิดตัว n = 0, e. ดีเอส E = 0และเริ่มต้นปัจจุบัน ฉัน พี = ยู/ R ฉัน มากกว่าปกติ 10-30 เท่า ดังนั้นการสตาร์ทเครื่องยนต์โดยตรงเช่นการเชื่อมต่อโดยตรงของกระดองกับแรงดันไฟหลักจึงไม่เป็นที่ยอมรับ เพื่อจำกัดกระแสเริ่มต้นสูงของอาร์เมเจอร์ รีโอสแตทสตาร์ทจะเชื่อมต่อแบบอนุกรมกับอาร์เมเจอร์ก่อนสตาร์ท R พีที่มีความต้านทานน้อย ในกรณีนี้เมื่อ E = O
ฉัน พี =U/(ร ฉัน - R พี ) << U/R ฉัน
ต้านทานรีโอสแตท Rพีถูกเลือกตามกระแสเกราะที่อนุญาต
ขณะที่เครื่องยนต์เร่งความเร็วจนถึงความเร็วที่กำหนด e. ดีเอส อีเพิ่มขึ้นและกระแสลดลงและลิโน่เริ่มต้นจะค่อยๆ ถูกลบออกอย่างสมบูรณ์ (รีโอสแตตเริ่มต้นจะคำนวณสำหรับการเปิดในระยะสั้น) การปรับรีโอสแตท R ทะเบียนในวงจรกระตุ้นที่มีความต้านทานค่อนข้างสูง (สิบและหลายร้อยโอห์ม) ก่อนสตาร์ทเครื่องยนต์จะถูกลบออกอย่างสมบูรณ์เพื่อให้กระแสกระตุ้นและฟลักซ์แม่เหล็กของสเตเตอร์เริ่มทำงาน Fเป็นชื่อ สิ่งนี้นำไปสู่การเพิ่มขึ้นของแรงบิดในการสตาร์ท ซึ่งช่วยให้เร่งความเร็วของเครื่องยนต์ได้ง่ายและรวดเร็ว
หลังจากสตาร์ทเครื่องและเร่งความเร็ว เครื่องยนต์จะทำงานในสภาวะคงที่ซึ่งแรงบิดเบรกบนเพลา ^ ภูเขาจะสมดุลโดยช่วงเวลาที่เครื่องยนต์พัฒนาขึ้น เอ็ม เอม , เช่น. เอ็ม เอม == ม t (ที่ น = ร่วมnst. )
มอเตอร์กระแสตรงสามารถคืนสถานะการทำงานให้คงที่ซึ่งถูกรบกวนโดยการเปลี่ยนแปลงของแรงบิดเบรก กล่าวคือ สามารถพัฒนาแรงบิดได้ เอ็ม, เท่ากับค่าใหม่ของแรงบิดในการเบรก เอ็ม tด้วยความเร็วใหม่ที่สอดคล้องกัน น".
แน่นอนถ้าแรงบิดเบรกของโหลด M เสื้อ มากกว่าแรงบิดของเครื่องยนต์ เอ็ม เอมจากนั้นความเร็วของเกราะจะลดลง ที่แรงดันคงที่ ยูและไหล Fนี้จะทำให้ลดลง ดีเอส อีกระดองเพิ่มกระแสกระดองและแรงบิดจนกระทั่งถึงสมดุลซึ่ง เอ็ม เอม = เอ็ม t และ น" < น. เมื่อแรงบิดเบรกลดลงเป็น M t โหมดการทำงานในสภาวะคงตัวจะตั้งค่าเป็น at . ในทำนองเดียวกัน เอ็ม เอม = เอ็ม ที"และ น"> น" . ดังนั้นมอเตอร์กระแสตรงมีคุณสมบัติในการควบคุมตนเอง - สามารถพัฒนาแรงบิดได้เท่ากับแรงบิดเบรก
2.4 การควบคุมความถี่
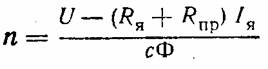
ความเร็วกระดองของมอเตอร์กระแสตรงถูกกำหนดตามสมการสถานะทางไฟฟ้า ยู= อีR ฉัน ฉัน ฉัน หลังจากแทน e เข้าไป ดีเอส E = sfน:

แรงดันกระดองตก R ฉัน ฉัน ฉันเล็ก: ที่พิกัดโหลด ไม่เกิน 0,03 - 0,07 ยู ชื่อ .
ดังนั้นความเร็วของมอเตอร์กระแสตรงจะเป็นสัดส่วนโดยตรงกับแรงดันไฟหลักที่ใช้และเป็นสัดส่วนผกผันกับฟลักซ์แม่เหล็กของสเตเตอร์ . มีสองวิธีในการควบคุมความเร็วของเครื่องยนต์: โดยการเปลี่ยนฟลักซ์สเตเตอร์ F หรือแรงดันไฟฟ้า U ที่จ่ายให้กับเครื่องยนต์ การควบคุมความเร็วโดยการเปลี่ยนสนามแม่เหล็กของเครื่องจะดำเนินการโดยใช้ตัวปรับอุณหภูมิในวงจรกระตุ้นเครื่องยนต์ แรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์จะเปลี่ยนแปลงโดยการปรับแรงดันแหล่งจ่าย
คุณสามารถเพิ่มลิโน่เพิ่มเติมให้กับวงจรกระดองได้ ในกรณีนี้ ลิโน่สตาร์ทจะถูกแทนที่ด้วยบัลลาสต์ R ฯลฯลิโน่ดังกล่าวทำหน้าที่ของทั้งลิโน่สตาร์ทและรีโอสแตทแบบปรับค่า ในกรณีนี้ สมการความถี่การหมุนของกระดองสำหรับมอเตอร์กระแสตรงมีรูปแบบ
จากนี้ไปการควบคุมความเร็วของเครื่องยนต์สามารถทำได้โดยการเปลี่ยนแรงดันไฟหลัก ความต้านทานของบัลลาสต์รีโอสแตตหรือฟลักซ์ของสเตเตอร์
การพลิกกลับของเครื่องยนต์ จากสมการแรงบิดของมอเตอร์ เอ็ม เอม = kFฉัน ฉันมันเป็นไปตามการย้อนกลับ กล่าวคือ การเปลี่ยนทิศทางการหมุนของกระดอง สามารถทำได้โดยการเปลี่ยนทิศทางของกระแสในขดลวดกระตุ้น (ไหล F) หรือกระแสเกราะ
ในการย้อนกลับของมอเตอร์ "ขณะเดินทาง" ทิศทางของกระแสกระดองจะเปลี่ยนไป (โดยการเปลี่ยนสายนำกระดอง) และขดลวดกระตุ้นจะไม่ถูกเปลี่ยนเนื่องจากมีการเหนี่ยวนำขนาดใหญ่และการทำลายวงจรด้วยกระแสเป็นสิ่งที่ยอมรับไม่ได้ การย้อนกลับของมอเตอร์ที่ตัดการเชื่อมต่อนั้นทำได้โดยการเปลี่ยนทิศทางของกระแสในสนามที่คดเคี้ยว (สลับเอาท์พุต)
3. มอเตอร์พร้อมชุดกระตุ้น
ในมอเตอร์ที่มีการกระตุ้นแบบอนุกรม ( fig.2.3a) กระแสกระตุ้นเท่ากับกระแสเกราะ: ฉัน ใน =ฉัน เอดังนั้นฟลักซ์แม่เหล็ก Ф จึงเป็นหน้าที่ของกระแสโหลด ฉัน เอ. ลักษณะของฟังก์ชันนี้จะแตกต่างกันไปตามขนาดของโหลด ที่ ฉัน เอ <(0,8...0,9) I ชื่อเมื่อระบบแม่เหล็กไม่อิ่มตัว f=k ฉ ฉัน เอและสัมประสิทธิ์สัดส่วน ถึง ฉในช่วงโหลดที่สำคัญยังคงเกือบคงที่ เมื่อโหลดเพิ่มขึ้น การไหล Fเติบโตช้ากว่า ฉัน เอ >ฉัน ชื่อ) เราสามารถสันนิษฐานได้ว่า F=const. ตามนี้ การขึ้นต่อกันก็เปลี่ยนไปเช่นกัน n=f(ฉัน เอ ), M=f(I เอ) (ข้าว. 2.3.b).
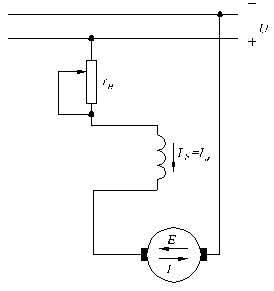
ข้าว. 2.3. - ก) โครงร่างของเครื่องยนต์ที่มีการกระตุ้นตามลำดับ b) การพึ่งพาแรงบิดและความเร็วในการหมุนของกระแสเกราะ (I ฉัน – กระแสเกราะ; ฉัน ใน – กระแสกระตุ้น;r น
– ความต้านทานโหลด
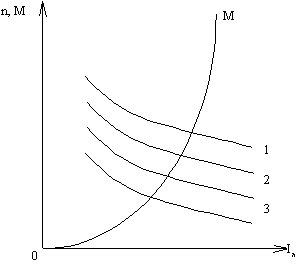
น- ความเร็วในการหมุน; หนึ่ง - ลักษณะทางธรรมชาติ; 2,3 - ลักษณะไม่คงที่ที่สอดคล้องกับค่าต่าง ๆ ของความต้านทานเพิ่มเติมr น ).
นอกจากลักษณะทางธรรมชาติ 1 แล้ว ยังเป็นไปได้ที่จะได้รับตระกูลของลักษณะรีโอสแตติก 2, 3 และ 4 โดยรวมความต้านทานเพิ่มเติม r n ในวงจรกระดอง ยิ่งค่าของ r n มากเท่าใด คุณสมบัติก็จะยิ่งต่ำลงเท่านั้น
ที่โหลดต่ำ ความเร็ว n จะเพิ่มขึ้นอย่างรวดเร็วและอาจเกินค่าสูงสุดที่อนุญาตได้ (เครื่องยนต์จะเข้าสู่ "ระยะห่าง") ดังนั้นเครื่องยนต์ดังกล่าวจึงไม่สามารถใช้ขับเคลื่อนกลไกที่ทำงานในโหมดปกติและที่โหลดต่ำได้
ด้วยคุณสมบัติที่เข้มงวด ความเร็วในการหมุน n แทบไม่ขึ้นอยู่กับโมเมนต์ M ดังนั้นกำลัง:
![]() , ที่ไหน จาก 4
- คงที่.
, ที่ไหน จาก 4
- คงที่.
ด้วยลักษณะที่นุ่มนวลของเครื่องยนต์ n เป็นสัดส่วนผกผันอันเป็นผลให้:
![]() , โดยที่ค่าคงที่.
, โดยที่ค่าคงที่.
ดังนั้นเมื่อโมเมนต์โหลดเปลี่ยนไปเป็นช่วงกว้าง กำลังไฟฟ้า R 2 , และด้วยเหตุนี้อำนาจ R 1 และปัจจุบัน ฉัน เอการเปลี่ยนแปลงสำหรับมอเตอร์ที่มีการกระตุ้นแบบอนุกรมในระดับที่น้อยกว่าสำหรับมอเตอร์ที่มีการกระตุ้นแบบขนาน นอกจากนี้ยังทนต่อการโอเวอร์โหลดได้ดีกว่า
ในมอเตอร์นี้ ขดลวดสนามเชื่อมต่อแบบอนุกรมกับวงจรกระดอง (รูปที่ 29.9 เอ), นั่นเป็นเหตุผล สนามแม่เหล็กF ขึ้นอยู่กับกระแสโหลด ฉัน = ฉัน a = ฉันใน . ที่โหลดต่ำ ระบบแม่เหล็กของเครื่องจะไม่อิ่มตัวและการพึ่งพาฟลักซ์แม่เหล็กบนกระแสโหลดนั้นเป็นสัดส่วนโดยตรง กล่าวคือ F = k ฉ ฉัน เอ (k ฉ- สัมประสิทธิ์สัดส่วน) ในกรณีนี้ เราจะพบโมเมนต์แม่เหล็กไฟฟ้า:
สูตรความถี่การหมุนจะอยู่ในรูปแบบ
 . (29.15)
. (29.15)
ในรูป 29.9, ขข้อมูลประสิทธิภาพที่นำเสนอ ม = ฉ(ฉัน) และ n= (ฉัน) มอเตอร์กระตุ้นซีรีส์ ที่โหลดสูง ความอิ่มตัวของระบบแม่เหล็กของเครื่องยนต์จะเกิดขึ้น ในกรณีนี้ ฟลักซ์แม่เหล็กแทบไม่เปลี่ยนแปลงเมื่อโหลดเพิ่มขึ้น และลักษณะของมอเตอร์เกือบจะเป็นเส้นตรง ลักษณะความเร็วของมอเตอร์กระตุ้นแบบอนุกรมแสดงให้เห็นว่าความเร็วของมอเตอร์เปลี่ยนแปลงอย่างมีนัยสำคัญตามการเปลี่ยนแปลงของโหลด ลักษณะนี้เรียกว่า อ่อน.
ข้าว. 29.9. มอเตอร์กระตุ้นตามลำดับ:
เอ- แผนภูมิวงจรรวม; ข- ลักษณะการทำงาน; ค - ลักษณะทางกล 1 - ลักษณะทางธรรมชาติ 2 - ลักษณะประดิษฐ์
ด้วยการลดลงของภาระของมอเตอร์กระตุ้นตามลำดับความเร็วในการหมุนจะเพิ่มขึ้นอย่างรวดเร็วและเมื่อโหลดน้อยกว่า 25% ของค่าเล็กน้อยก็สามารถเข้าถึงค่าที่เป็นอันตรายต่อเครื่องยนต์ (“ เกินพิกัด ”). ดังนั้นการทำงานของมอเตอร์กระตุ้นแบบอนุกรมหรือการสตาร์ทด้วยโหลดเพลาน้อยกว่า 25% ของค่าเล็กน้อยจึงไม่เป็นที่ยอมรับ
เพื่อการทำงานที่เชื่อถือได้มากขึ้น เพลาของมอเตอร์กระตุ้นแบบต่อเนื่องจะต้องเชื่อมต่ออย่างแน่นหนากับกลไกการทำงานโดยใช้คัปปลิ้งและเฟือง การใช้สายพานเป็นสิ่งที่ยอมรับไม่ได้ เนื่องจากหากสายพานขาดหรือรีเซ็ต เครื่องยนต์อาจ "หมด" เมื่อพิจารณาถึงความเป็นไปได้ในการใช้งานเครื่องยนต์ด้วยความเร็วที่เพิ่มขึ้น เครื่องยนต์กระตุ้นแบบอนุกรมตาม GOST จะได้รับการทดสอบเป็นเวลา 2 นาทีเพื่อให้เกินความเร็ว 20% เหนือค่าสูงสุดที่ระบุไว้บนเกราะโรงงาน แต่ไม่น้อยกว่า 50% เหนือค่าเล็กน้อย
ลักษณะทางกลชุดกระตุ้นมอเตอร์ n=f(M) นำเสนอในรูป 29.9, ใน.เส้นโค้งที่ตกลงอย่างรวดเร็วของลักษณะทางกล ( ธรรมชาติ 1 และเทียม 2 ) ให้มอเตอร์กระตุ้นแบบต่อเนื่องมีการทำงานที่มั่นคงภายใต้ภาระทางกลใดๆ คุณสมบัติของมอเตอร์เหล่านี้ในการพัฒนาแรงบิดขนาดใหญ่ตามสัดส่วนกำลังสองของกระแสโหลดมีความสำคัญ โดยเฉพาะอย่างยิ่งภายใต้สภาวะการสตาร์ทที่ยากลำบากและในระหว่างการโอเวอร์โหลด เนื่องจากโหลดของมอเตอร์เพิ่มขึ้นทีละน้อย กำลังที่อินพุตจึงเพิ่มขึ้นช้ากว่า กว่าแรงบิด คุณลักษณะของมอเตอร์กระตุ้นแบบซีรีส์นี้เป็นหนึ่งในสาเหตุของ ประยุกต์กว้างเช่นเดียวกับมอเตอร์ฉุดลากในการขนส่ง เช่นเดียวกับมอเตอร์เครนในการติดตั้งอุปกรณ์ยก เช่น ในทุกกรณีของไดรฟ์ไฟฟ้าที่มีสภาวะการสตาร์ทที่ยากและการรวมกันของโหลดที่สำคัญบนเพลามอเตอร์ที่มีความเร็วต่ำ
จัดอันดับการเปลี่ยนแปลงความเร็วของชุดกระตุ้นมอเตอร์
 , (29.16)
, (29.16)
ที่ไหน น - ความเร็วในการหมุนที่โหลดเครื่องยนต์ 25% ของค่าปกติ
ความเร็วในการหมุนของมอเตอร์กระตุ้นแบบซีรีส์สามารถควบคุมได้โดยการเปลี่ยนอย่างใดอย่างหนึ่ง แรงดันไฟฟ้า U, หรือฟลักซ์แม่เหล็กของขดลวดกระตุ้น ในกรณีแรกการปรับค่า ลิโน่ R rg (รูปที่ 29.10, เอ). ด้วยการเพิ่มความต้านทานของลิโน่นี้ แรงดันไฟฟ้าที่อินพุตของเครื่องยนต์และความถี่ของการหมุนจะลดลง วิธีการควบคุมนี้ใช้เป็นหลักในเครื่องยนต์กำลังขนาดเล็ก ในกรณีของกำลังเครื่องยนต์ที่มีนัยสำคัญ วิธีนี้ไม่ประหยัดเนื่องจากการสูญเสียพลังงานจำนวนมากใน R rg . นอกจากนี้, ลิโน่ R rg , เมื่อคำนวณจากกระแสไฟในการทำงานของมอเตอร์แล้ว กลับกลายเป็นว่ายุ่งยากและมีราคาแพง
เมื่อเครื่องยนต์ประเภทเดียวกันหลายเครื่องทำงานร่วมกัน ความเร็วในการหมุนจะถูกควบคุมโดยการเปลี่ยนรูปแบบการรวมที่สัมพันธ์กัน (รูปที่ 29.10, ข). ดังนั้น เมื่อมอเตอร์เชื่อมต่อแบบขนาน มอเตอร์แต่ละตัวจะอยู่ภายใต้แรงดันไฟหลักเต็ม และเมื่อมอเตอร์สองตัวเชื่อมต่อกันเป็นชุด มอเตอร์แต่ละตัวจะมีแรงดันไฟหลักเพียงครึ่งเดียว ด้วยการทำงานพร้อมกันของเครื่องยนต์จำนวนมากขึ้น ทำให้มีตัวเลือกการสลับจำนวนมากขึ้น วิธีการควบคุมความเร็วนี้ใช้ในตู้รถไฟไฟฟ้า ซึ่งมีการติดตั้งมอเตอร์ฉุดลากเหมือนกันหลายตัว
สามารถเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์ได้ เมื่อมอเตอร์ขับเคลื่อนจากแหล่งจ่ายกระแสตรงที่มีแรงดันไฟฟ้าควบคุม (เช่น ตามวงจรที่คล้ายกับรูปที่ 29.6 เอ). เมื่อแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์ลดลง ลักษณะทางกลของมันจะลดลง ในทางปฏิบัติโดยไม่เปลี่ยนความโค้งของมอเตอร์ (รูปที่ 29.11)
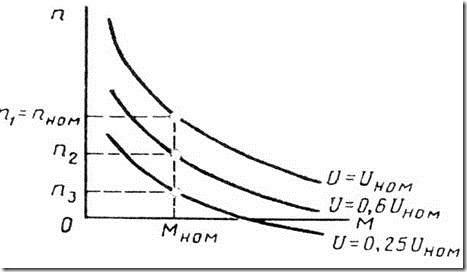
ข้าว. 29.11. ลักษณะทางกลของมอเตอร์กระตุ้นแบบอนุกรมที่มีการเปลี่ยนแปลงแรงดันไฟฟ้าขาเข้า
มีสามวิธีในการควบคุมความเร็วของเครื่องยนต์โดยการเปลี่ยนฟลักซ์แม่เหล็ก: โดยการแบ่งขดลวดกระตุ้นด้วยรีโอสแตต r rg , การแบ่งส่วนขดลวดกระตุ้นและการแบ่งส่วนขดลวดกระดองด้วยลิโน่สแตท r w . กำลังเปิดเครื่องปรับอุณหภูมิ r rg , การแบ่งขดลวดกระตุ้น (รูปที่ 29.10, ใน) เช่นเดียวกับการลดลงของความต้านทานของลิโน่นี้ทำให้กระแสกระตุ้นลดลง ฉันใน \u003d ฉัน a - ฉัน rg และทำให้ความเร็วในการหมุนเพิ่มขึ้น วิธีนี้ประหยัดกว่าวิธีก่อนหน้า (ดูรูปที่ 29.10 เอ), ใช้บ่อยขึ้นและประเมินโดยค่าสัมประสิทธิ์การควบคุม
 .
.
โดยปกติความต้านทานของลิโน่ r rg เอาไปอย่างนั้น กก. >= 50% .
เมื่อแบ่งสนามที่คดเคี้ยว (รูปที่ 29.10, G) การปิดส่วนหนึ่งของการหมุนของขดลวดนั้นมาพร้อมกับการเพิ่มความเร็วในการหมุน เมื่อแบ่งกระดองที่คดเคี้ยวด้วยลิโน่สแตท r w (ดูรูปที่ 29.10, ใน) กระแสกระตุ้นเพิ่มขึ้น ฉันใน \u003d ฉัน a + ฉัน rg ซึ่งทำให้ความเร็วในการหมุนลดลง วิธีการควบคุมนี้ถึงแม้จะให้การควบคุมที่ลึกล้ำ แต่ก็ไม่ประหยัดและไม่ค่อยได้ใช้มากนัก
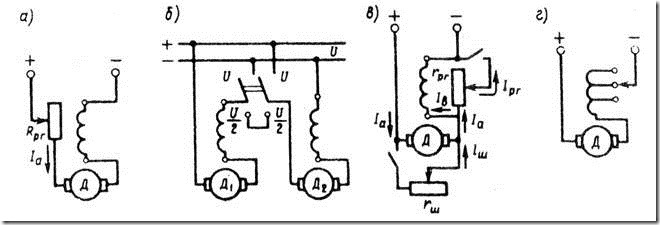
ข้าว. 29.10. การควบคุมความเร็วในการหมุนของมอเตอร์กระตุ้นแบบอนุกรม





