Det er flere klasser av elektriske omformere, blant annet praktisk bruk fant de såkalte induktive analogene. I dem skjer energikonvertering på grunn av konverteringen av induksjonen av viklingene, som er en integrert del av selve enheten. Viklingene er plassert på to elementer - på statoren og rotoren. Så, hva er forskjellen mellom en stator og en rotor (hva er de og hva er deres funksjoner?).
På denne måten reduseres den elektriske topplasten til en tredjedel, energiforbruket forblir identisk. Strømkjøpere som fornøyelsesparker belastes vanligvis i henhold til maksimal belastning i Europa og kan redusere driftskostnadene betydelig ved å lagre energi. Som kilde brukte han et sett med 320 galvaniske celler. På grunn av den høye prisen på batteriet måtte han slutte å prøve. I dag klarer vi oss ikke uten elektriske motorer, de brukes nesten overalt.
Den enkleste definisjonen av de to delene av en transduser er deres funksjonalitet. Alt er enkelt her: statoren (elektrisk motor eller generator) er en fast del, rotoren er bevegelig. I de fleste tilfeller er sistnevnte plassert inne i førstnevnte, og det er et lite gap mellom dem. Det finnes såkalte enheter med en ekstern rotor, som er en roterende ring, på innsiden av hvilken det er en fast stator.
Elektriske motorer er maskiner som konverterer elektrisk energi til mekanisk energi. Energi kastes bort i Joule-varme, Foucault-strømmer, hysterese, gnister osv. hver elektrisk motor består av en fast del kalt en stator og en bevegelig del kalt en rotor eller armatur som roterer inne i statoren. hopper over elektrisitet gjennom statorviklingen og rotorviklingen dannes det to magnetfelt, som samvirker med hverandre med tiltreknings- og frastøtende krefter, slik at rotoren roterer.
Asynkrone elektriske motorer er blant de mest brukte motorene. Statoren er i form av en hul sylinder, bestående av spesielle plater på ca. 0,5 mm tykkelse, som er isolert med maling eller maling. I sporene som er plassert rundt periferien av statoren, er det tilveiebrakt en tre-omdreiningsisolasjon av isolerte kobber- eller aluminiumledere, gjennom hvilke en trefaset vekselstrøm flyter. Rotoren består av de samme platene og har form som en hel sylinder. Det er spor på overflaten og en trefaset vikling er satt inn, lik statorviklingen, eller bare kobberstenger er satt inn i sporene, som er forbundet i begge ender med kobberringer.
Typer omformere
Hvorfor er det så viktig å vurdere synspunktene for å forstå hvordan statoren til en elektrisk motor skiller seg fra dens bevegelige del. Hele poenget er det designfunksjoner elektriske motorer har mye, det samme gjelder generatorer (disse er omformere mekanisk energi i elektriske, elektriske motorer har motsatt funksjonalitet).
Ankerviklinger er laget av svært ledende metallstenger, som kort tid festes i endene av ankeret. Viklingen ligner et bur og omtales som et anker eller anker. Statorens roterende magnetiske felt forårsaker betydelige strømmer i ankerviklingen. I følge Lenz' lov finnes det magnetiske krefter virker på ankerlederne, og ankeret roterer i rotasjonsretningen magnetfelt. Rotoren kan imidlertid ikke rotere med samme frekvens som feltet. Vi sier at han har et klart savn.
Imidlertid, med økningen i rotorhastigheten, vil forskjellen i rotorhastigheten og det roterende magnetfeltet gradvis reduseres, men også redusere taukryssningshastigheten til de induktive linjene, og dermed redusere den induserte strømmen og krafteffektene til den roterende magnetiske felt, og rotorhastigheten fra et bestemt tidspunkt vil ikke lenger øke. . Rotoren går ikke parallelt med det roterende magnetfeltet.

Så elektriske motorer er delt inn i AC og likestrøm. De første er på sin side delt inn i synkron, asynkron og samler. For førstnevnte er rotasjonsvinkelhastigheten til statoren og rotoren lik. I den andre er disse to indikatorene ulik. I kollektortyper er det en såkalt frekvensomformer og antall faser av en mekanisk type i designet, som kalles en kollektor. Derav navnet på enheten. Det er han som er direkte forbundet med viklingene til rotoren til motoren og dens stator.
Animasjon av trefase induksjonsmotor. Aluminium er ikke et ferromagnetisk materiale, så dets rotasjon kan ikke forklares på samme måte som rotasjonen til en magnet. I et roterende magnetfelt induseres forskjellige spenninger i forskjellige deler av aluminiumssylinderen. Sylindrene begynner å bli utsatt for såkalte virvelstrømmer, som i et roterende magnetfelt skaper en kraft som roterer sylinderen. Dette er jo større, jo større hastigheten til motoren er langsommere enn hastigheten til det roterende magnetfeltet.
Av denne grunn er det en induksjonsmotor hvis motor ikke har en synkron hastighet. Hastigheten varierer avhengig av belastningen. Ved å endre de tofasede ledningene i motorterminalene, reverseres rotasjonsretningen til rotasjonsfeltet og motoren roterer i motsatt retning. Ved design kan induksjonsmotorer modifiseres til enfasede induksjonsmotorer, som er egnet for små apparater som vaskemaskiner.
DC-maskiner på rotoren har samme kollektor. Men når det gjelder generatorer, utfører den funksjonene til en omformer, og når det gjelder elektriske motorer, funksjonene til en omformer.
Hvis en elektrisk enhet er en maskin der bare rotoren roterer, er navnet endimensjonalt. Hvis to elementer roterer i motsatte retninger samtidig, kalles dette apparatet todimensjonalt eller birotativt.
Den store praktiske betydningen av trefasestrømmer gjør det mulig å designe enkle og kraftige elektriske motorer som omdanner elektrisk energi til mekanisk energi. De er basert på bevegelsen av ledere som en elektrisk strøm passerer gjennom i et magnetfelt, som drives av en strøm i statorviklingen.
Tenk på situasjonen i fig. Tre spoler hvis akser er i vinkel med hverandre og hvis viklinger er forbundet med en stjerne. Disse spolene er koblet til trefasespenning fra en annen kilde. Strømmen som går gjennom spolene skaper et magnetfelt mellom dem. Hvis vi setter en magnet i dette feltet, vil den begynne å rotere med samme frekvens som vekselstrømmen. Magneten roterer synkront med magnetfeltet. Rotasjonen av et magnetfelt er et magnetfelt hvis magnetiske induksjonsvektor endres med jevne mellomrom. Det er et roterende magnetfelt her.
Asynkrone motorer
For å forstå konseptene til motorrotoren og dens stator, er det nødvendig å vurdere en av typene elektriske konverteringsmaskiner. Siden asynkrone elektriske motorer brukes oftest i produksjonsutstyr og husholdningsapparater, så er det verdt å vurdere dem.

Sluttpunktet til den magnetiske induksjonsvektoren beveger seg i en sirkel. På fig. 186 viser tidspunktet for spolestrømmen ved toppen og bunnen av det roterende magnetfeltet. På samme måte kan du finne retningen til induksjonslinjene på andre tidspunkter. Tre-fase elektrisk motor har to hoveddeler.
Stator - har lignende design som generatorstatoren. Rotor - en sylinder av rillede stålplater der viklinger er installert. Det brukes en såkalt separatorvikling, som for eksempel lages ved å helle smeltet aluminium i spor. Dens størkning skaper et ledende bur av sterke aluminiumstenger, som er koblet til rotorhodet med aluminiumsringer. Ankerviklingen har ubetydelig motstand og en motor med denne typen rotor kalles en kortermet motor.
Så hva er en asynkronmotor? Dette er vanligvis en støpejernskasse som den magnetiske kretsen presses inn i. Spesielle spor er laget i den, hvor statorviklingen, satt sammen av kobbertråd, passer. Sporene er forskjøvet i forhold til hverandre med 120º, så det er bare tre av dem. De danner tre faser.
Rotoren er på sin side en sylinder satt sammen av stålplater (stemplet elektrisk stål), og montert på en stålaksel, som igjen er installert i lagre når den elektriske motoren monteres. Avhengig av hvordan faseviklingene til enheten er satt sammen, kan motorrotorene være fase- eller kortsluttet.
Det er ingen ledere for rotoren. Denne rotoren er som et bur for Ježek i et bur, et mysterium som dukker opp i Jaroslav Foglars bøker. På grunn av den lille motstanden til ankeret, induserer det roterende magnetfeltet store strømmer i viklingen. Dette resulterer i en stor magnetisk kraft som får rotoren til å rotere. Imidlertid roterer ikke ankeret med frekvensen til det roterende magnetfeltet. Hvis dette var tilfelle, ville det ikke vært noen endring i den magnetiske fluksen til viklingen indusert av strømmen, og derfor ville årsaken til rotasjonen forsvinne.
Det er nødvendig at ankeret beveger seg i forhold til det roterende magnetfeltet, dvs. "Føl" et ikke-stasjonært magnetfelt. Hvis den roterte synkront, "følte" den det stasjonære feltet. Hvis en magnet brukes som rotor, oppstår synkron rotasjon for å lage en synkronmotor.
- En faserotor er en sylinder som spoler er satt sammen på, forskjøvet i forhold til hverandre med 120º. Samtidig er det installert tre sleperinger i utformingen, som ikke kommer i kontakt verken med akselen eller med hverandre. På den ene siden er endene av tre viklinger festet til ringene, og på den andre, grafittbørster, som er i glidende kontakt i forhold til ringene. Et eksempel på en slik maskin er kranmotorer med faserotor.
- Ekorn-burrotoren er satt sammen av kobberstenger som passer inn i spor. Samtidig er de forbundet med en spesiell ring laget av kobber.
I motsetning til magnetens synkrone rotasjon, roterer det trefasede ankeret til den elektriske motoren alltid med en lavere frekvens, såkalt asynkront. Disse motorene kalles trefasede asynkronmotorer. Verdien karakteristisk for asynkron motor, kalles slip c og bestemmes av forholdet som rotasjonshastigheten til den roterende mg. felt og rotorhastighet. Slippen kan uttrykkes i prosent.
Hvis ankeret ikke vil overvinne motstand under rotasjon, dvs. når enheten er i standby-modus, er slipingen liten og ankerviklingen går gjennom en liten strøm. Når motoren er belastet, øker slipingen, viklingen induserer mer strøm, og rotasjonen av rotoren opprettholdes med mer magnetisk kraft.
I motsetning til magnetens synkrone rotasjon, roterer det trefasede ankeret til den elektriske motoren alltid med en lavere frekvens, såkalt asynkront. Disse motorene kalles trefasede asynkronmotorer. Verdikarakteristikken til en asynkron elektrisk motor kalles slip c og bestemmes av forholdet som rotasjonshastigheten til den roterende mg. felt og rotorhastighet. Slippen kan uttrykkes i prosent.
Asynkron elektrisk motor med faserotor er eieren av store dimensjoner og vekt. Men den har utmerkede egenskaper når det gjelder start og justering av dreiemomenter. Motorer med ekorn-burrotor anses som de mest pålitelige i dag. De er enkle i design, og er derfor billige. Deres eneste ulempe er den store startstrømmen, som nå bekjempes ved å koble statorviklingene fra en stjerne til et delta. Det vil si at starten gjøres når den er koblet med en stjerne, etter et sett med omdreininger blir det gjort en bytte til et delta.
Relaterte innlegg: 
Vikling av et elektrisk produkt (enhet) - et sett med svinger eller spoler arrangert på en bestemt måte og koblet, designet for å skape eller bruke et magnetisk felt, eller for å oppnå en gitt motstandsverdi for et elektrisk produkt (enhet).Viklingsspole av et elektrisk produkt (enhet) - en vikling av et elektrisk produkt (enhet) eller en del av det, laget som en separat strukturell enhet(GOST 18311-80).
Artikkelen forteller om enheten til statoren og rotorviklingene elektriske maskiner vekselstrøm.
En stator med tolv spor, som hver inneholder en leder, er skjematisk vist i fig. 1, a. Forbindelser mellom ledere lagt i spor er indikert for kun én av de tre fasene; begynnelsen av fasene A, B, C av viklingen er betegnet C1, C2, C3; slutter - C4, C5, C6. Deler av viklingen som er lagt i sporene (den aktive delen av viklingen) er konvensjonelt vist i form av stenger, og forbindelsene mellom lederne i sporene (endeforbindelser) er vist som en heltrukket linje.
Statorkjernen har form av en hul sylinder, som er en pakke eller en serie pakker (atskilt av ventilasjonskanaler) fra plater av elektrisk stål. For maskiner med liten og middels kraft er hvert ark stemplet i form av en ring med spor langs den indre omkretsen. På fig. lb viser en statorplate med spor av en av de benyttede formene.
Ris. 1. Plasseringen av viklingen i statorslissene og fordelingen av strømmer i lederne
La den øyeblikkelige verdien av strømmen iA for den første fasen på et tidspunkt være maksimal og strømmen ledes fra begynnelsen av C1-fasen til dens slutt C4. Vi vil vurdere denne strømmen som positiv.
Ved å definere de momentane strømmene i fasene som projeksjoner av roterende vektorer på den faste aksen PÅ (fig. 1, c), finner vi at strømmene til fase B og C er negative på et gitt tidspunkt, dvs. de er rettet fra endene av fasene til begynnelsen.
La oss følge fig. 1, d dannelse av et roterende magnetfelt. I det betraktede tidspunktet er strømmen til fase A rettet fra begynnelsen til slutten, det vil si at hvis den i lederne 1 og 7 går fra oss utover tegningens plan, går den i lederne 4 og 10 bakfra. plan av tegningen til oss (se. Fig. 1, a og d).
I fase B går strømmen på dette tidspunktet fra slutten av fasen til dens begynnelse. Ved å koble lederne til den andre fasen i henhold til modellen til den første, kan det oppnås at strømmen til fase B passerer gjennom lederne 12, 9, 6, 3; samtidig, gjennom lederne 12 og 6, strømmer strømmen fra oss utover tegningens plan, og gjennom lederne 9 og 3 - til oss. Bildet av fordelingen av strømmer i fase C vil bli oppnådd i henhold til prøven av fase B.
Strømretningene er gitt i fig. 1,d; de stiplede linjene viser de magnetiske linjene til feltet skapt av statorstrømmene; retningene til linjene bestemmes av regelen for høyre skrue. Det kan ses av figuren at lederne danner fire grupper med samme strømretninger og antall poler 2p i magnetsystemet er fire. Områdene på statoren der magnetlinjene går ut av den er nordpolene, og områdene der magnetlinjene kommer inn i statoren er sørpolene. Buen til statorsirkelen, okkupert av en pol, kalles poldeling.
Magnetfeltet på forskjellige punkter av statoromkretsen er forskjellig. Bildet av fordelingen av magnetfeltet langs omkretsen av statoren gjentas periodisk etter hver dobbeltpoldeling 2τ; buevinkel 2τ er tatt som 360 elektriske grader. Siden det er p dobbeltpolinndelinger langs omkretsen av statoren, er 360 geometriske grader lik 360p elektriske grader, og en geometrisk grad er lik p elektriske grader.
På fig. 1d viser magnetlinjene for et bestemt tidspunkt. Hvis vi tar for oss bildet av magnetfeltet i flere påfølgende øyeblikk av tid, kan vi se at feltet roterer med konstant hastighet.
La oss finne rotasjonshastigheten til feltet. Etter en tid som er lik halve perioden til vekselstrømmen, endres retningene til alle strømmer til motsatt, slik at de magnetiske polene bytter plass, dvs. i halve perioden roterer magnetfeltet med en del av omdreiningen lik 1 /2ρ. I en periode med vekselstrøm roterer feltet med 1/ρ omdreining. Så på ett sekund gjør feltet 1/ρ omdreininger, der f er frekvensen til vekselstrømmen. Derfor er rotasjonshastigheten til statormagnetfeltet, dvs. den synkrone hastigheten, (i omdreininger per minutt)
Antallet p av polpar kan bare være heltall, så ved en frekvens på for eksempel 50 Hz kan synkronhastigheten være 3000; 1500; 1000 rpm osv.
Ris. 2. Detaljert diagram av en trefaset enkeltlagsvikling
En karakteristisk mengde som bestemmer ytelsen til viklingen er antall spor per pol og fase, dvs. antall spor som er okkupert av viklingen av hver fase innenfor en poldeling:
der z er antall statorspor.
Viklingen vist i fig. 1a har følgende data:
Selv for denne enkleste viklingen viser den romlige tegningen av lederne og deres forbindelser å være kompleks, så den erstattes vanligvis av et utvidet diagram, der viklingslederne er vist ikke plassert på en sylindrisk overflate, men på et plan (en sylindrisk overflate med spor og en vikling "utfolder seg" til et plan). På fig. 2, og et detaljert diagram av den betraktede statorviklingen er gitt.
I den forrige figuren ble det for enkelhets skyld vist at en del av viklingens fase A, lagt i spor 1 og 4, består av kun to ledere, det vil si en omdreining. I virkeligheten består hver slik del av viklingen per en pol av w vindinger, dvs. at hvert par spor inneholder w ledere kombinert til en spole. Derfor, når du omgår i et utvidet skjema, for eksempel fase A fra spor 1, må du omgå spor 1 og 4 w ganger før du går videre til spor 7. Avstanden mellom sidene av svingen til en spole, eller viklingen stigning, y er vist i fig. 1, d; det er vanligvis uttrykt i antall spor.
Ris. 3. Skjold asynkron maskin
Vist i fig. 1 og 2 kalles statorviklingen enkeltlags, siden den passer i hvert spor i ett lag. For å plassere frontdelene som krysser hverandre på planet, bøyes de langs forskjellige overflater (fig. 2, b). Enkeltlags viklinger er laget med et trinn lik poldelingen y = τ: (fig. 2, a), eller dette trinnet er lik gjennomsnittlig poldeling for forskjellige spoler i samme fase, hvis y > 1 , y . For tiden er dobbeltlagsviklinger mer vanlige.
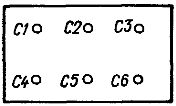
Begynnelsen og slutten av hver av de tre fasene av viklingen vises på maskinens skjold, hvor det er seks klemmer (fig. 3). Tre lineære ledninger fra trefaset nettverk. De nedre klemmene C4, C5, C6 (faseender) er enten forbundet på ett punkt med to horisontale hoppere, eller hver av disse klemmene er forbundet med en vertikal jumper til den øvre klemmen som ligger over den.
I det første tilfellet danner de tre fasene til statoren en stjerneforbindelse, i det andre tilfellet en deltaforbindelse. Hvis for eksempel en statorfase er designet for en spenning på 220 V, da linjespenning nettverket som motoren er koblet til, må være 220 V hvis statoren er slått på av en trekant; når den slås på av en stjerne, må linjespenningen til nettverket være
![]()
Når du kobler til statoren med en stjerne, leveres ikke den nøytrale ledningen, siden motoren er en symmetrisk belastning for nettverket.
Rotoren til en asynkron maskin er satt sammen av stemplede plater av isolert elektrisk stål på en aksel eller på en spesiell støttestruktur. Det radielle gapet mellom statoren og rotoren er gjort så lite som mulig for å sikre lav magnetisk motstand i banen til den magnetiske fluksen som trenger inn i begge deler av maskinen.
Det minste gapet tillatt av teknologiske krav er fra tideler av en millimeter til flere millimeter, avhengig av kraften og dimensjonene til maskinen. Rotorviklingens ledere er plassert i spor langs rotorens generatriser direkte på overflaten for å sikre størst mulig forbindelse mellom rotorviklingen og rotasjonsfeltet.
Asynkronmaskiner produseres både med fase og med ekorn-burrotor.

Ris. 4. Faserotor
Faserotoren har som regel trefase vikling, utført, som en stator, med samme antall poler. Viklingen er forbundet med en stjerne eller en trekant; de tre endene av viklingen føres ut til tre isolerte sleperinger som roterer med maskinakselen. Gjennom børstene som er montert på den stasjonære delen av maskinen og glir langs sleperingene, er en trefaset start- eller justeringsreostat inkludert i rotoren, dvs. aktiv motstand introduseres i hver fase av rotoren. Utseende faserotoren er vist i fig. 4 er tre sleperinger synlige på venstre ende av skaftet. Asynkronmotorer med faserotor brukes der det kreves jevn hastighetskontroll av den drevne mekanismen, samt ved hyppige start av motoren under belastning.
Utformingen av en ekorn-burrotor er mye enklere enn den til en faserotor. For en av strukturene i fig. 5 viser a formen på arkene som rotorkjernen er satt sammen av. I dette tilfellet danner hullene nær den ytre omkretsen av hvert ark langsgående spor i kjernen. Aluminium helles i disse sporene, etter at det har herdet, dannes langsgående ledende stenger i rotoren. I begge ender av rotoren støpes det samtidig aluminiumsringer som kortslutter aluminiumsstavene. Det resulterende ledende systemet kalles vanligvis et ekornbur.
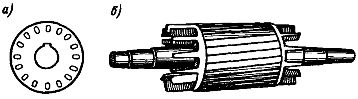
Ris. 5. Ekorn-burrotor
Ekorn-bur ekorn-bur rotoren er vist i fig. 5 B. I endene av rotoren er ventilasjonsblader synlige, støpt integrert med kortslutningsringene. I dette tilfellet er slissene skråstilt av én slissedeling langs rotoren. Ekornburet er enkelt, har ingen glidende kontakter, så trefase asynkronmotorer med ekorn-burrotor er de billigste, enkleste og mest pålitelige; de er de vanligste.





