momento electromagnético a motor sincrónico es creado por la interacción de la corriente en el devanado del rotor con un campo magnético giratorio.
Momento electromagnético METRO proporcional a la potencia electromagnética:
 (3.40)
(3.40)
Velocidad de rotación síncrona angular.
Sustituyendo en (3.39) el valor de la potencia electromagnética (3.33), obtenemos:
 , (3.41)
, (3.41)
es decir, el momento electromagnético de un motor de inducción es proporcional a la potencia de las pérdidas eléctricas en el devanado del rotor.
Si el valor de la corriente del rotor según la expresión (3.28) se sustituye en (3.41), entonces obtenemos la fórmula par electromagnético máquina asíncrona (Nm):
 (3.42)
(3.42)
Parámetros del circuito equivalente de la máquina asíncrona r 1 , r¢ 2 , x 1 y x ¢ 2, incluidos en la expresión (3.42), son constantes, ya que sus valores permanecen prácticamente inalterables con los cambios en la carga de la máquina. El voltaje en el devanado de fase del estator también se puede considerar constante. tu 1 y frecuencia f1. En términos de momento METRO la única variable es el deslizamiento s, que para diferentes modos de operación de una máquina asíncrona puede tomar diferentes valores en el rango de + ¥ a -¥ (ver Fig. 3.5).
Considere la dependencia del torque con el deslizamiento M = f(s) a tu 1= constante, f1= constante y parámetros constantes del circuito equivalente. Esta dependencia se llama característica mecánica máquina asíncrona. Análisis de la expresión (3.42), que es una expresión analítica de una característica mecánica M = f(s), muestra que para valores de deslizamiento s= 0 y s= ¥ momento electromagnético METRO= 0. De esto se deduce que la característica mecánica M = f(s) tiene un máximo.
Para determinar el deslizamiento crítico scr, correspondiente al momento máximo, es necesario tomar la primera derivada de (3.42) e igualarla a cero: . Como resultado
 (3.43)
(3.43)
Sustituyendo el valor del deslizamiento crítico (según 3.43) en la expresión del momento electromagnético (3.42), tras una serie de transformaciones, obtenemos la expresión del momento máximo (N m):
 (3.44)
(3.44)
En (3.43) y (3.44) el signo más corresponde al modo motor y el signo menos al modo generador de funcionamiento de la máquina asíncrona.
Para máquinas asíncronas propósito general resistencia activa del devanado del estator r1 mucho menor que la suma de las reactancias inductivas: r1< < (x 1 + x¢ 2). Por lo tanto, despreciando el valor r1, obtenemos expresiones simplificadas para el deslizamiento crítico
 , (3.45)
, (3.45)
y par máximo (N·m)
 (3.46)
(3.46)
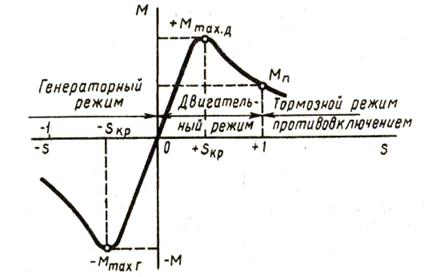
Arroz. 3.10. Dependencia de los modos de funcionamiento de una máquina asíncrona en deslizamiento
El análisis de la expresión (3.44) muestra que momento máximo hay más máquinas asíncronas en modo generador que en modo motor ( M max à > Ü maxD). En la fig. 3.4 muestra la característica mecánica de una máquina asíncrona M = f(s) a tu 1= constante Esta característica indica las zonas correspondientes a diferentes modos de funcionamiento: modo motor (0< s < 1), когда электромагнитный момент METRO está girando; modo generador ( - ¥ < s < 0) и тормозной режим противовключением (1 < s < + ¥), когда электромагнитный момент METRO es inhibidor.
De (3.42) se deduce que el par electromagnético de un motor de inducción es proporcional al cuadrado de la tensión de red: METRO ≡ T 1 2. Esto afecta en gran medida al rendimiento del motor: incluso una ligera disminución de la tensión de red provoca una notable reducción del par del motor asíncrono. Por ejemplo, cuando la tensión de red se reduce un 10% respecto a la nominal ( tu 1 = 0.9tu nombre) el par electromagnético del motor se reduce en un 19%: М¢ = 0.9 2 METRO = 0.81METRO, dónde METRO— momento a la tensión nominal de la red, y METRO¢ - par a tensión reducida.
Para analizar el funcionamiento de un motor asíncrono, es más conveniente utilizar la característica mecánica M = f(s), mostrado en la fig. 3.5.
 |
Arroz. 3.11. Dependencia del par electromagnético de un motor de inducción con el deslizamiento
Cuando el motor está conectado a la red, el campo magnético del estator, sin inercia, inmediatamente comienza a girar con una frecuencia síncrona n 1, al mismo tiempo, el rotor del motor bajo la influencia de las fuerzas de inercia en el momento inicial de arranque permanece inmóvil ( nº 2= 0) y deslizando s = 1.
Sustituyendo en (3.42) el deslizamiento s= 1, obtenemos la expresión para el par de arranque de un motor asíncrono (N m):
 (3.47)
(3.47)
Bajo la acción de este momento, comienza la rotación del rotor del motor, mientras que el deslizamiento disminuye y el par aumenta de acuerdo con la característica M = f(s). En deslizamiento crítico scr momento alcanza su valor máximo M máx..
Con un aumento adicional en la velocidad de rotación (reducción del deslizamiento), el momento METRO comienza a disminuir hasta que alcanza un valor constante igual a la suma de los momentos contrapuestos aplicados al rotor del motor: momento XX M0 y par de carga útil (par en el eje del motor) M 2, eso es
M \u003d M 0 + M 2 \u003d M st. (3.48)
Hay que tener en cuenta que con deslizamientos cercanos a la unidad (modo de arranque del motor), los parámetros del circuito equivalente de un motor asíncrono cambian notablemente sus valores. Esto se explica principalmente por dos factores: aumento de la saturación magnética de las capas dentadas del estator y el rotor, lo que conduce a una disminución de la resistencia de fuga inductiva x1 y x2, y el efecto del desplazamiento de corriente en las barras del rotor, lo que conduce a un aumento en la resistencia activa del devanado del rotor. r 2 ¢. Por tanto, los parámetros del circuito equivalente de un motor asíncrono utilizados en el cálculo del par electromagnético según (3.42), (3.44) y (3.46) no pueden utilizarse para calcular el par de arranque según (3.47).
Momento estático M st es igual a la suma de los momentos que se contrarrestan con rotación uniforme del rotor ( nº 2= constante). Supongamos que el momento de compensación en el eje del motor M 2 corresponde a la carga nominal del motor. En este caso, el estado estacionario de la operación del motor está determinado por un punto en la característica mecánica con coordenadas M = M nominal y s = s nominal, dónde nombre M y s nombre— valores nominales de par electromagnético y deslizamiento.
Del análisis de la característica mecánica también se sigue, que la operación estable de un motor de inducción es posible con deslizamientos menores que los críticos (s< s кр ), es decir, en la sección OA de la característica mecánica. El hecho es que es en esta área donde un cambio en la carga sobre el eje del motor se acompaña de un cambio correspondiente en el par electromagnético.
Entonces, si el motor estaba funcionando en modo nominal ( M nombre; s nombre), entonces los momentos son iguales: M nom \u003d M 0 + M 2. Si hay un aumento en el par de carga M 2 hasta el valor M¢ 2, entonces se violará la igualdad de los momentos, es decir nombre M< М 0 + М 2 , y la velocidad del rotor comenzará a disminuir (aumentará el deslizamiento). Esto conducirá a un aumento en el par electromagnético a un valor METRO ¢ \u003d METRO 0 + METRO ¢ 2, (punto B), después de lo cual el modo de funcionamiento del motor volverá a ser estable.
Si, durante el funcionamiento del motor en el modo nominal, el par de carga disminuye al valor М¢¢ 2, entonces se volverá a violar la igualdad de los momentos, pero ahora el par será mayor que la suma de los opuestos: M nominal > M 0 + M¢¢ 2. La velocidad del rotor comenzará a aumentar (el deslizamiento disminuirá), y esto conducirá a una disminución en el par electromagnético. METRO hasta el valor METRO¢¢ \u003d METRO 0 + METRO¢¢ 2(punto C); el modo de operación estable se restablecerá nuevamente, pero a otros valores METRO y s.
El funcionamiento de un motor de inducción se vuelve inestable durante los deslizamientos s³s cr. Entonces, si el par electromagnético del motor M = M máx., y deslizarse s = scr, entonces incluso un ligero aumento en el momento de carga M 2, provocando un aumento en el deslizamiento s, dará lugar a una disminución del par electromagnético METRO. Esto será seguido por un mayor incremento en el deslizamiento, y así sucesivamente, hasta que el deslizamiento alcance el valor s= 1, es decir, hasta que se detenga el rotor del motor.
Así, cuando el par electromagnético alcanza su valor máximo, se establece el límite de funcionamiento estable del motor de inducción. Por tanto, para el funcionamiento estable del motor, es necesario que la suma de los momentos de carga que actúan sobre el rotor sea inferior al par máximo: M st \u003d (M 0 + M 2)< М тах . Pero para que la operación de un motor de inducción sea confiable y para que las sobrecargas aleatorias a corto plazo no provoquen la parada del motor, es necesario que tenga capacidad de sobrecarga.
Capacidad de sobrecarga del motor λ está determinada por la relación del momento máximo M máx. a nominal nombre M. Para motores de inducción la capacidad de sobrecarga de uso general es = 1,7 ÷ 2,5.
También debe prestar atención al hecho de que el funcionamiento del motor al deslizarse s< s кр , es decir, en la sección de trabajo de la característica mecánica, es la más económica, ya que corresponde a valores pequeños de deslizamiento y, en consecuencia, a valores más bajos de pérdidas eléctricas en el devanado del rotor. P e2 \u003d sP em.
El uso de la fórmula (3.35) para calcular las características mecánicas de los motores asíncronos no siempre es posible, ya que los parámetros del circuito equivalente del motor generalmente no se dan en catálogos y libros de referencia, por lo tanto, para cálculos prácticos, generalmente se usa una fórmula de par simplificada. usó. Esta fórmula se basa en la suposición de que la resistencia activa del devanado del estator de un motor de inducción r1= 0, mientras que:
 (3.49)
(3.49)
El deslizamiento crítico está determinado por la fórmula:
![]() . (3.50)
. (3.50)
El cálculo de la característica mecánica es mucho más sencillo si se realiza en unidades relativas  . En este caso, la ecuación característica mecánica tiene la forma:
. En este caso, la ecuación característica mecánica tiene la forma:
 . (3.51)
. (3.51)
El uso de una fórmula simplificada (3.51) es más apropiado cuando se calcula la sección de trabajo de la característica mecánica durante el deslizamiento. s< s кр , ya que en este caso el error no supera los valores permitidos para los cálculos técnicos. Al deslizarse s > scr el error puede alcanzar el 15-17%.
Características mecánicas de un motor asíncrono con cambios en la tensión de red y resistencia activa del devanado del rotor
De (3.42), (3.44) y (3.47) se puede ver que el par electromagnético del motor de inducción, así como sus valores máximo y de arranque, son proporcionales al cuadrado de la tensión suministrada al devanado del estator: METRO ≡ T 1 2 . Al mismo tiempo, el análisis de la expresión (3.43) muestra que el valor del deslizamiento crítico no depende de la tensión tu 1 Esto nos da la oportunidad de trazar las características mecánicas METRO = f por valores diferentes Voltaje tu 1(Fig. 3.12), de lo que se deduce que las fluctuaciones en el voltaje de la red tu 1 sobre él valor nominal U 1 nom van acompañados no solo de cambios en los pares máximos y de arranque, sino también de cambios en la velocidad del rotor.
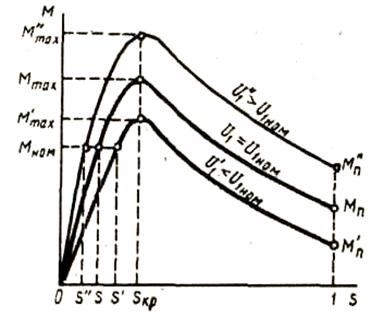 |
Arroz. 3.12. Influencia de la tensión en el tipo de característica mecánica de un motor de inducción
Con una disminución en el voltaje de la red, la velocidad del rotor disminuye (aumenta el deslizamiento). Voltaje tu 1 influye en la asignación del momento máximo M-tah, así como la capacidad de sobrecarga del motor. Entonces si el voltaje tu 1 disminuyó en un 30%, es decir U 1 \u003d 0.7U nominal, entonces el par máximo del motor de inducción se reducirá a más de la mitad:
M¢ máx = 0,7 2 M máx = 0.49M máx..
¿Cuánto disminuirá la capacidad de sobrecarga del motor si, por ejemplo, a la tensión nominal de la red, la capacidad de sobrecarga  , luego, cuando el voltaje cae en un 30%, la capacidad de sobrecarga del motor
, luego, cuando el voltaje cae en un 30%, la capacidad de sobrecarga del motor  , es decir | el motor no puede transportar ni siquiera la carga nominal.
, es decir | el motor no puede transportar ni siquiera la carga nominal.
Como se desprende de (3.44), el valor del par motor máximo no depende de la resistencia activa del rotor r¢ 2 . En cuanto al deslizamiento crítico scr, entonces, como puede verse en (3.43), es proporcional a la resistencia r¢ 2 . Por lo tanto, si en un motor asíncrono la resistencia activa del circuito del rotor aumenta gradualmente, el valor del par máximo permanecerá sin cambios y el deslizamiento crítico aumentará (Fig. 3.13). En este caso, el par de arranque del motor MP aumenta con el aumento de la resistencia r¢ 2 hasta cierto valor. En la figura, esto corresponde a la resistencia r¢ 2 III, en el que el par de arranque es igual al máximo. Con un mayor aumento de la resistencia r¢ 2 se reduce el par de arranque.
 |
Arroz. 3.13. La influencia de la resistencia activa del devanado del rotor en las características mecánicas de un motor asíncrono.
Análisis gráfico METRO = f(s), mostrado en la fig. 3.13 también muestra que los cambios en la resistencia del rotor r¢ 2 acompañado de cambios en la velocidad de rotación: con un aumento r¢ 2 con momento de carga constante Calle M el deslizamiento aumenta, es decir, la velocidad disminuye (puntos 1, 2, 3 y 4).
La influencia de la resistencia activa del devanado del rotor en la forma de las características mecánicas de los motores asíncronos se utiliza en el diseño de motores. Por ejemplo, los motores asíncronos de propósito general deben tener una característica de velocidad "dura" (ver Fig. 3.11), es decir, operar con un pequeño deslizamiento nominal. Esto se logra mediante el uso de un devanado de rotor con baja resistencia activa en el motor. r ¢ 2. En este caso, el motor tiene una mayor eficiencia debido a la reducción de pérdidas eléctricas en el devanado del rotor ( R e2 \u003d m 1 I¢ 2 2 r¢ 2). Valor seleccionado r¢ 2 debe proporcionar al motor el par de arranque requerido.
Si es necesario obtener un motor con un valor aumentado del par de arranque, se aumenta la resistencia activa del devanado del rotor. Pero al mismo tiempo, se obtiene un motor con un gran valor de deslizamiento nominal y, en consecuencia, con una menor eficiencia.
Dependencias consideradas M \u003d f (U 1) y M = f(r 2 ") también son de gran importancia práctica cuando se consideran los problemas de arranque y control de la velocidad de rotación de los motores asíncronos.
Características de rendimiento del motor asíncrono
Las características de rendimiento de un motor de inducción (Fig. 3.14) son dependencias expresadas gráficamente de la velocidad de rotación nº 2, eficiencia h, momento útil (par en el eje) M 2, Factor de potencia cosφ 1, y la corriente del estator yo 1, de potencia útil R 2 a tu 1= constante y f1= constante

Arroz. 3.14. Características de rendimiento del motor asíncrono
característica de velocidadn 2 \u003d f (P 2).
Velocidad del rotor del motor de inducción
n 2 \u003d n 1 (1-s).
Deslizándose sobre (3.33)
es decir, el deslizamiento del motor, y por lo tanto su velocidad, está determinado por la relación entre las pérdidas eléctricas en el rotor y la potencia electromagnética R em.
Despreciando las pérdidas eléctricas en el rotor en modo inactivo, podemos tomar R e2= 0, y por lo tanto s0 ≈ 0 y norte 20 ≈ norte 1,. A medida que aumenta la carga sobre el eje del motor, crece la relación (8.1), alcanzando valores de 0,01 ÷ 0,08 a carga nominal. De acuerdo con esta dependencia n 2 = f (P 2) es una curva ligeramente inclinada respecto al eje x.
Sin embargo, con un aumento en la resistencia activa del rotor r¢ 2 la pendiente de esta curva aumenta. En este caso, los cambios en la velocidad de rotación pág. 2 durante las fluctuaciones de carga R 2 aumentar. Esto se explica por el hecho de que a medida que aumenta r¢ 2 las pérdidas eléctricas en el rotor aumentan [ver. (3.31)].
Prestaciones mecánicas M 2 = f(P 2)
La dependencia del momento útil en el eje del motor. M 2 de la potencia neta R 2 se define por la expresión
 (3.53)
(3.53)
dónde R 2— potencia útil, W;
es la frecuencia angular de rotación del rotor.
De esta expresión se sigue que si nº 2= const, entonces la gráfica M 2 \u003d f (P 2) es una línea recta. Pero en un motor asíncrono con carga creciente R 2 la velocidad del rotor disminuye, y por lo tanto el momento útil en el eje M 2 al aumentar la carga, aumenta un poco más rápido que la carga y, por lo tanto, la gráfica M 2 = f(P2) tiene una apariencia curvilínea.
Dependencia cosφ 1 = f(P 2)
Debido al hecho de que la corriente del estator yo 1 tiene un componente reactivo (inductivo) necesario para crear un campo magnético en el estator, el factor de potencia de los motores asíncronos es menor a uno.
El valor más bajo del factor de potencia corresponde al modo XX. Esto se explica por el hecho de que el actual XX yo 0 bajo cualquier carga se mantiene prácticamente sin cambios. Por lo tanto, con cargas de motor bajas, la corriente del estator es pequeña y en gran parte reactiva ( yo 1 ≈ yo 0). Como resultado, el cambio de fase de la corriente del estator en relación con el voltaje es significativo ( φ ≈ φ 0 ), solo un poco menos de 90° (Fig. 3.15).
El factor de potencia de los motores asíncronos en el modo XX generalmente no supera 0,2. Con un aumento en la carga en el eje del motor, el componente activo de la corriente aumenta yo 1 y el factor de potencia aumenta, alcanzando el valor más alto (0,80 ÷ 0,90) a una carga próxima a la nominal.
 |
Figura 3.15. Diagrama vectorial de un motor de inducción bajo carga ligera
Un nuevo aumento en la carga se acompaña de una disminución cosφ 1, lo que se explica por el aumento de la resistencia inductiva del rotor ( x2s) aumentando el deslizamiento y, por lo tanto, la frecuencia de la corriente en el rotor. Para mejorar el factor de potencia de los motores asíncronos, es extremadamente importante que el motor funcione siempre, o al menos una parte significativa del tiempo, con una carga cercana a la carga nominal.
Esto sólo puede asegurarse si Buena elección potencia del motor. Si el motor funciona bajo carga durante una parte significativa del tiempo, entonces para aumentar cosφ 1 voltaje aplicado adecuadamente al motor tu 1 disminuir.
Por ejemplo, en motores que funcionan con una conexión en triángulo del devanado del estator, esto se puede hacer volviendo a conectar los devanados del estator en estrella, lo que provocará una disminución en tensión de fase a tiempo. En este caso, el flujo magnético del estator y, en consecuencia, la corriente de magnetización disminuyen en aproximadamente un factor. Además, el componente activo de la corriente del estator aumenta un poco. Todo esto contribuye a un aumento en el factor de potencia del motor.
En la fig. 3.16 muestra gráficos de dependencia cosφ 1 motor asíncrono de la carga al conectar los devanados del estator con una estrella (curva 1 ) y un triángulo (curva 2).
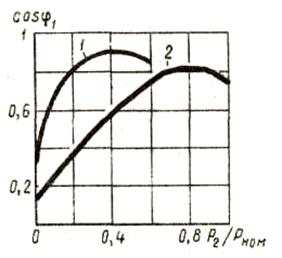
Arroz. 3.16. Adiccion cosφ 1 de la carga al conectar el devanado del estator con una estrella (1) y un delta (2).
Preguntas para el autoexamen
1. Explicar el principio de funcionamiento de una máquina asíncrona.
2. Describir los modos de funcionamiento de una máquina asíncrona.
3. ¿Cómo se llama el deslizamiento de una máquina asíncrona?
4. Escriba las ecuaciones de voltaje para un motor de inducción.
5. Escriba las ecuaciones de MMF y las corrientes del motor de inducción.
6. Dibujar los circuitos equivalentes de un motor de inducción.
7. Dibuja un diagrama vectorial de un motor de inducción.
8. ¿Qué pérdidas existen en un motor asíncrono? Dibuje un diagrama de energía para un motor de inducción.
9. Escribe la fórmula del par electromagnético de un motor de inducción.
10. Dibuje un gráfico de la característica mecánica de un motor de inducción.
11. ¿Cómo cambian las características mecánicas de un motor asíncrono en función de la variación de la tensión de red y de la resistencia activa del rotor?
12. Dibujar las características de funcionamiento de un motor de inducción.
Características de rendimiento del motor asíncrono
TRABAJO EN INGENIERÍA ELÉCTRICA
"Características de rendimiento del motor asíncrono"
Introducción
Una máquina eléctrica asíncrona es una máquina eléctrica de corriente alterna en la que la velocidad del rotor no es igual a la velocidad del campo magnético del estator y depende de la carga. Se utiliza principalmente como motor y como generador. El estator tiene ranuras en las que se coloca un devanado monofásico o multifásico (generalmente trifásico), conectado a la red eléctrica de CA. Este devanado está diseñado para crear un campo magnético móvil, rotatorio circular - para máquinas trifásicas y pulsante o rotatorio elíptico - para máquinas monofásicas. El rotor es una parte giratoria de una máquina eléctrica, también diseñada para crear un campo magnético que, al interactuar con el campo del estator, conduce a la creación de un par electromagnético que determina la dirección de conversión de energía. Para los generadores, este momento es de naturaleza de frenado, contrarrestando el par del motor primario, que pone en movimiento el rotor. En los motores, por el contrario, este momento es impulsor, venciendo la resistencia del mecanismo accionado por el rotor.
Un generador asíncrono es una máquina eléctrica asíncrona que funciona en modo generador. Una fuente auxiliar de corriente eléctrica de baja potencia y un dispositivo de frenado (en un accionamiento eléctrico).
Un motor eléctrico asíncrono es una máquina eléctrica asíncrona que funciona en modo motor. El motor eléctrico asíncrono trifásico más común (inventado en 1889 por MO Dolivo-Dobrovolsky). Los motores asíncronos tienen un diseño relativamente simple y una operación confiable, pero tienen un rango de velocidad limitado y un factor de potencia bajo con cargas bajas. Potencia desde fracciones de W hasta decenas de MW.
1. Motor asíncrono
1.1 Frecuencia de rotación del campo magnético y rotor
Dejar n1 es la frecuencia de rotación del campo magnético. Un sistema de corriente alterna multifase crea un campo magnético rotatorio cuya velocidad de rotación por minuto es n1=60f1/p, donde f1 es la frecuencia de la corriente, p es el número de pares de polos formados por cada fase del estator devanado.
n2- frecuencia de rotación del rotor. Si el rotor gira a una frecuencia no igual a la frecuencia rotación del campo magnético (n2≠n1), entonces esta frecuencia se llama asíncrona. En un motor asíncrono, el flujo de trabajo solo puede ejecutarse a una frecuencia asíncrona.
Durante el funcionamiento, la velocidad del rotor siempre es menor que la velocidad del campo.
(n2< n1)
1.2 El principio de funcionamiento de un motor asíncrono
En los motores asíncronos, un sistema trifásico crea un campo magnético giratorio cuando se conecta a una red de corriente alterna. El campo magnético giratorio del estator cruza los conductores del devanado del rotor e induce fem en ellos. Si el devanado del rotor está cerrado a cualquier resistencia o cortocircuitado, entonces bajo la acción de la fem inducida. pasa la corriente. Como resultado de la interacción de la corriente en el devanado del rotor con una rotación campo magnético el devanado del estator crea un par, bajo la influencia del cual el rotor comienza a girar en la dirección de rotación del campo magnético. Para cambiar la dirección de rotación del rotor, es necesario intercambiar dos de los tres cables que conectan el devanado del estator a la red con respecto a los terminales de la red.
1.3 El dispositivo de un motor asíncrono
El núcleo del estator se recluta a partir de placas de acero, de 0,35 o 0,5 mm de espesor. Las placas están estampadas con ranuras y fijadas en el bastidor del motor. La cama está instalada sobre la base. Los conductores de su devanado se colocan en las ranuras longitudinales del estator, que están interconectadas para formar un sistema trifásico. Para conectar los devanados del estator a una red trifásica, se pueden conectar en estrella o en triángulo. Esto hace posible encender el motor en una red con diferentes voltajes. Para voltajes más bajos (220/127 V), el devanado del estator está conectado en un triángulo, para voltajes más altos (380/220 V), en una estrella. El núcleo del rotor también está hecho de placas de acero con un espesor de 0,5 mm. Las placas se estampan con ranuras y se ensamblan en paquetes que se montan en el eje de la máquina. A partir de los paquetes se forma un cilindro con ranuras longitudinales, en el que se colocan los conductores del devanado del rotor. Dependiendo del tipo de devanado del rotor, las máquinas asíncronas pueden ser Rotor de fase y jaula de ardilla. La resistencia no se puede incluir en un devanado en cortocircuito. En el devanado de fase, los conductores están interconectados, formando un sistema trifásico. devanados tres fases conectados por una estrella. El devanado del rotor puede estar cortocircuitado o cortocircuitado. Los motores con rotor de jaula de ardilla son más sencillos y económicos, pero los motores con rotor de fase tienen mejores propiedades de arranque y regulación (se utilizan a altas potencias). La potencia de los motores asíncronos varía desde varias decenas de vatios hasta 15 000 kW con una tensión del devanado del estator de hasta 6 kV. La desventaja de los motores asíncronos es el bajo factor de potencia.
1.4 Funcionamiento de un motor asíncrono bajo carga
n1 es la frecuencia de rotación del campo magnético del estator. n2- frecuencia de rotación del rotor.
n1 > n2
El campo magnético del estator gira en la misma dirección que el rotor y se desliza en relación con el rotor con una frecuencia ns= n1 – n2
El retraso del rotor del campo magnético giratorio del estator se caracteriza por deslizamiento S= ns / n1, => S = (n1 - n2) / n1
Si el rotor está estacionario, entonces n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Si el rotor gira sincrónicamente con el campo magnético, entonces el deslizamiento S = 0.
En ralentí, es decir, cuando no hay carga sobre el eje del motor, el deslizamiento es despreciable y puede tomarse igual a 0. La carga sobre el eje del rotor puede ser, por ejemplo, una fresa de torno. Crea par de frenado. Si el par y el par de frenado son iguales, el motor funcionará de manera estable. Si la carga sobre el eje ha aumentado, el par de frenado será mayor que el par y la velocidad del rotor. n2 disminuir. Según la fórmula S =(n1 - n2) / n1 el deslizamiento aumentará. Dado que el campo magnético del estator se desliza con respecto al rotor con una frecuencia ns= n1 – n2, luego cruzará los conductores del rotor con más frecuencia, la corriente y el par motor aumentarán en ellos, que pronto serán iguales al par de frenado. Cuando la carga disminuye, el par de frenado se vuelve menor que el par, aumenta n2 y disminuye S. La FEM disminuye y la corriente del rotor y el par vuelven a ser iguales al freno. El flujo magnético en el entrehierro de la máquina permanece aproximadamente constante para cualquier cambio en la carga.
2. Características de rendimiento del motor asíncrono
El rendimiento de un motor de inducción depende
S - deslizamiento
n2 - velocidad del rotor
M - momento desarrollado
Consumo de corriente I1
Entrada de alimentación P1
factor de potencia COSφ
De la potencia útil P2 en el eje de la máquina.
Estas características se eliminan en condiciones naturales. La frecuencia actual f1 y el voltaje U1 permanecen constantes. Solo cambia la carga en el eje del motor.
A medida que aumenta la carga en el eje del motor, S aumenta. Cuando el motor está al ralentí n2≈n1, y S≈0. A la carga nominal, el deslizamiento suele ser del 3 al 5%.
Con un aumento en la carga sobre el eje del motor, la velocidad de rotación n2 disminuye. Sin embargo, el cambio de velocidad al aumentar la carga de 0 a nominal es muy pequeño y no supera el 5 %. Por lo tanto, la característica de velocidad de un motor de inducción es rígida. La curva tiene una pendiente muy pequeña con respecto al eje horizontal.
Esfuerzo de torsión METRO, desarrollado por el motor, es equilibrado por el par de frenado en el eje Monte y momento М0, va a superar las pérdidas mecánicas, es decir M \u003d Mt + M0 \u003d P2 /Ω2+ М0, dónde R2– potencia útil del motor , Ω 2 - velocidad angular del rotor. en reposo M= M0. Con un aumento de la carga, el par también aumenta y, debido a una ligera disminución de la velocidad del rotor, el aumento del par se produce más rápido que la potencia útil en el eje.
La corriente I1 consumida por el motor de la red varía de manera desigual con el aumento de la carga en el eje del motor. En reposo, el factor de potencia COSφ es pequeño. Y la corriente tiene un gran componente reactivo. Con cargas bajas en el eje del motor, el componente activo de la corriente del estator es menor que el componente reactivo, por lo que el componente activo de la corriente tiene poco efecto sobre la corriente I1. Con cargas altas, el componente activo de la corriente del estator se vuelve mayor que el reactivo, y un cambio en la carga provoca un cambio significativo en la corriente I1.
La dependencia gráfica de la potencia consumida por el motor P1 se representa como una línea casi recta, que se desvía ligeramente hacia arriba con cargas altas, lo que se explica por un aumento de las pérdidas en los devanados del estator y del rotor con el aumento de la carga.
La dependencia del factor de potencia COSφ de la carga en el eje del motor es la siguiente. En reposo, СOSφ es pequeño, alrededor de 0,2. Dado que la componente activa de la corriente del estator, debido a las pérdidas de potencia en la máquina, es pequeña en comparación con la componente reactiva de esta corriente, lo que crea un flujo magnético. Con un aumento de la carga en el eje, СOSφ aumenta, alcanzando el valor máximo de 0,8–0,9, como resultado de un aumento en el componente activo de la corriente del estator. A cargas muy elevadas se produce una ligera disminución del COSφ, ya que como consecuencia de un aumento significativo del deslizamiento y de la frecuencia de la corriente en el rotor, aumenta la reactancia del devanado del rotor.
La curva de eficiencia η tiene la misma forma que en cualquier máquina o transformador. En reposo, eficiencia = 0. Con un aumento en la carga en el eje del motor, la eficiencia aumenta bruscamente y luego disminuye. La eficiencia alcanza su valor más alto con tal carga, cuando las pérdidas de potencia en el acero y las pérdidas mecánicas, que no dependen de la carga, son iguales a las pérdidas de potencia en los devanados del estator y del rotor, que dependen de la carga.
resúmenes similares:
Variedades de micromotores ejecutivos asíncronos: con un rotor hueco no magnético y magnético; con un devanado cortocircuitado como una rueda de ardilla. Esquema de una ranura semicerrada del circuito magnético. Creación de un campo magnético giratorio por un estator bifásico.
El dispositivo de una máquina asíncrona trifásica, sus elementos principales, modos y principio de funcionamiento, la historia de creación y aplicación en etapa actual. El procedimiento y condiciones para la obtención de un campo magnético giratorio. La dependencia del par electromagnético del deslizamiento.
Determinación del momento de inercia total de la caja de cambios, cabrestante y carga reducida al eje del motor. Cálculo del momento de resistencia reducido al eje durante el ascenso, descenso. El valor de la potencia en el eje de la caja de cambios. El motivo de la diferencia de potencia al subir y bajar la carga.
Cálculo y diseño del motor, selección de dimensiones principales, cálculo del devanado del estator. Cálculo de las dimensiones de la zona dentada del estator y elección del entrehierro. Modelado de motores en el entorno MatLab Power System Blockset, así como con parámetros de modo nominal.
Protección principal y de respaldo del turbogenerador.
Dispositivo e imagen condicional de síncrona. máquina trifásica. La ubicación de los polos del campo magnético del estator y el rotor. Dependencia del par electromagnético de una máquina síncrona del ángulo. el esquema de inclusión del motor síncrono al frenaje dinámico.
Información general sobre máquinas asíncronas (de dos devanados Maquinas electricas corriente alterna). Diseño de partes activas, conjuntos de cojinetes, dispositivo de entrada del micromotor asíncrono 4АА50В2, principio de su funcionamiento, campos de aplicación y significado.
Diseño de un motor eléctrico asíncrono trifásico con rotor de jaula de ardilla. Elección del motor analógico, dimensiones, configuración, material del circuito magnético. Determinación del coeficiente de devanado del estator, cálculo mecánico del eje y rodamientos.
Cálculo de un motor asíncrono con rotor en jaula de ardilla. Elección de los tamaños principales. Cálculo de las dimensiones de la zona del diente del estator y entrehierro, rotor, corriente de magnetización. Parámetros del modo de funcionamiento. Cálculo de pérdidas, características de funcionamiento y arranque.
Información general sobre máquinas asíncronas. Información general sobre los modos de funcionamiento de un motor asíncrono. Definición analítica y gráfica de los modos de operación de una máquina de reconstrucción asíncrona.
Características del desarrollo de un motor eléctrico asíncrono con rotor en jaula de ardilla tipo 4А160S4У3 basado en una máquina generalizada. Cálculo del modelo matemático de un motor asíncrono en forma de Cauchy 5. Adecuación del modelo de arranque directo de un motor asíncrono.
Método para calcular el circuito magnético. generador síncrono, la elección de sus dimensiones y configuración, la construcción de las características de la magnetización de la máquina. Determinación de parámetros de devanados, realización de cálculos térmicos y de ventilación, plano de montaje del generador.
Inadmisibilidad de múltiples inicio asíncrono motor síncrono, lo que conduce a una caída significativa de voltaje en el sistema de alimentación, a la aparición de fuerzas dinámicas significativas en las partes frontales del devanado del estator y al envejecimiento térmico del aislamiento.
Construcción del diagrama de carga del actuador. La elección de los elementos del circuito de potencia. Cálculo de características mecánicas. Evaluar la necesidad de retroalimentación de velocidad. Determinación de la eficiencia media del sistema. Procesos transitorios en el accionamiento.
Información general sobre dispositivos regulación automática excitación de máquinas síncronas. Factores que afectan el voltaje y el circuito de suministro de energía. Dispositivo de composición actual: cambios necesarios en las características de una máquina de composición.
Circuito magnético de motores. Dimensiones, configuración, material. Núcleo del estator, rotor y pieza polar. Cálculo del circuito magnético. Entrehierro, dientes y estator trasero. activo y reactancia inductiva devanados del estator para estado estacionario.
TRABAJO EN INGENIERÍA ELÉCTRICA
"Características de rendimiento del motor asíncrono"
Introducción
asincrónico máquina eléctrica- se trata de una máquina eléctrica de CA, en la que la velocidad del rotor no es igual a la velocidad del campo magnético del estator y depende de la carga. Se utiliza principalmente como motor y como generador. El estator tiene ranuras en las que se coloca un devanado monofásico o multifásico (generalmente trifásico), conectado a la red eléctrica de CA. Este devanado está diseñado para crear un campo magnético móvil, rotatorio circular - para máquinas trifásicas y pulsante o rotatorio elíptico - para máquinas monofásicas. El rotor es una parte giratoria de una máquina eléctrica, también diseñada para crear un campo magnético que, al interactuar con el campo del estator, conduce a la creación de un par electromagnético que determina la dirección de conversión de energía. Para los generadores, este momento es de naturaleza de frenado, contrarrestando el par del motor primario, que pone en movimiento el rotor. En los motores, por el contrario, este momento es impulsor, venciendo la resistencia del mecanismo accionado por el rotor.
Un generador asíncrono es una máquina eléctrica asíncrona que funciona en modo generador. fuente auxiliar corriente eléctrica Dispositivo de baja potencia y frenado (en el accionamiento eléctrico).
Un motor eléctrico asíncrono es una máquina eléctrica asíncrona que funciona en modo motor. El motor eléctrico asíncrono trifásico más común (inventado en 1889 por MO Dolivo-Dobrovolsky). Motores asíncronos Tienen un diseño relativamente simple y un funcionamiento fiable, pero tienen un rango de velocidad limitado y un factor de potencia bajo con cargas ligeras. Potencia desde fracciones de W hasta decenas de MW.
1. Motor asíncrono
1.1 Frecuencia de rotación del campo magnético y rotor
Dejar norte 1 es la frecuencia de rotación del campo magnético. Un sistema de corriente alterna multifase crea un campo magnético rotatorio cuya velocidad de rotación por minuto es n1=60f1/p, donde f1 es la frecuencia de la corriente, p es el número de pares de polos formados por cada fase del estator devanado.
norte 2 - frecuencia de rotación del rotor. Si el rotor gira con una frecuencia que no es igual a la frecuencia de rotación del campo magnético (n2≠n1), entonces esta frecuencia se llama asíncrona. En un motor asíncrono, el flujo de trabajo solo puede ejecutarse a una frecuencia asíncrona.
Durante el funcionamiento, la velocidad del rotor siempre es menor que la velocidad del campo.
( norte 2< norte 1)
1.2 El principio de funcionamiento de un motor asíncrono
En los motores asíncronos, un sistema trifásico crea un campo magnético giratorio cuando se conecta a una red de corriente alterna. El campo magnético giratorio del estator cruza los conductores del devanado del rotor e induce fem en ellos. Si el devanado del rotor está cerrado a cualquier resistencia o cortocircuitado, entonces bajo la acción de la fem inducida. pasa la corriente. Como resultado de la interacción de la corriente en el devanado del rotor con el campo magnético giratorio del devanado del estator, se crea un par, bajo cuya influencia el rotor comienza a girar en la dirección de rotación del campo magnético. Para cambiar la dirección de rotación del rotor, es necesario intercambiar dos de los tres cables que conectan el devanado del estator a la red con respecto a los terminales de la red.
1.3 El dispositivo de un motor asíncrono
El núcleo del estator se recluta a partir de placas de acero, de 0,35 o 0,5 mm de espesor. Las placas están estampadas con ranuras y fijadas en el bastidor del motor. La cama está instalada sobre la base. Los conductores de su devanado se colocan en las ranuras longitudinales del estator, que están interconectadas para formar un sistema trifásico. Para conectar los devanados del estator a red trifásica pueden estar conectados en estrella o delta. Esto hace posible encender el motor en una red con diferentes voltajes. Para voltajes más bajos (220/127 V), el devanado del estator está conectado en un triángulo, para voltajes más altos (380/220 V), en una estrella. El núcleo del rotor también está hecho de placas de acero con un espesor de 0,5 mm. Las placas se estampan con ranuras y se ensamblan en paquetes que se montan en el eje de la máquina. A partir de los paquetes se forma un cilindro con ranuras longitudinales, en el que se colocan los conductores del devanado del rotor. Según el tipo de devanado del rotor máquinas asíncronas puede estar con fase y corto circuito rotor. La resistencia no se puede incluir en un devanado en cortocircuito. En el devanado de fase, los conductores están interconectados, formando un sistema trifásico. Los devanados de las tres fases están conectados por una estrella. El devanado del rotor puede estar cortocircuitado o cortocircuitado. Los motores con rotor de jaula de ardilla son más sencillos y económicos, pero los motores con rotor de fase tienen mejores propiedades de arranque y regulación (se utilizan a altas potencias). La potencia de los motores asíncronos varía desde varias decenas de vatios hasta 15 000 kW con una tensión del devanado del estator de hasta 6 kV. La desventaja de los motores asíncronos es el bajo factor de potencia.
1.4 Funcionamiento de un motor asíncrono bajo carga
norte 1 es la frecuencia de rotación del campo magnético del estator. norte 2 - frecuencia de rotación del rotor.
norte 1 > norte 2
El campo magnético del estator gira en la misma dirección que el rotor y se desliza en relación con el rotor con una frecuencia norte s = norte 1 – norte 2
El retraso del rotor del campo magnético giratorio del estator se caracteriza por deslizamiento S = norte s / norte 1, => S = ( norte 1 – norte 2) / norte 1
Si el rotor está estacionario, entonces norte 2 =0, S = ( norte 1 – norte 2) / norte 1, => S = norte 1 / norte 1 =1
Si el rotor gira sincrónicamente con el campo magnético, entonces el deslizamiento S = 0.
En ralentí, es decir, en ausencia de carga en el eje del motor, el deslizamiento es despreciable y puede tomarse igual a 0. La carga en el eje del rotor puede ser, por ejemplo, un cortador torno. Crea par de frenado. Si el par y el par de frenado son iguales, el motor funcionará de manera estable. Si la carga sobre el eje ha aumentado, el par de frenado será mayor que el par y la velocidad del rotor. norte 2 disminuir. Según la fórmula S = ( norte 1 – norte 2) / norte 1 el deslizamiento aumentará. Dado que el campo magnético del estator se desliza con respecto al rotor con una frecuencia norte s = norte 1 – norte 2, luego cruzará los conductores del rotor con más frecuencia, la corriente y el par motor aumentarán en ellos, que pronto serán iguales al par de frenado. Cuando la carga disminuye, el par de frenado se vuelve menor que el par, aumenta norte 2 y disminuye S . La FEM disminuye y la corriente del rotor y el par vuelven a ser iguales al freno. El flujo magnético en el entrehierro de la máquina permanece aproximadamente constante para cualquier cambio en la carga.
2. Características de rendimiento del motor asíncrono
El rendimiento de un motor de inducción depende
S - deslizamiento
n2 - velocidad del rotor
M - momento desarrollado
Consumo de corriente I1
Entrada de alimentación P1
factor de potencia COSφ
De la potencia útil P2 en el eje de la máquina.
Estas características se eliminan en condiciones naturales. La frecuencia actual f1 y el voltaje U1 permanecen constantes. Solo cambia la carga en el eje del motor.
A medida que aumenta la carga en el eje del motor, S aumenta. Cuando el motor está al ralentí n2≈n1, y S≈0. A la carga nominal, el deslizamiento suele ser del 3 al 5%.
Con un aumento en la carga sobre el eje del motor, la velocidad de rotación n2 disminuye. Sin embargo, el cambio de velocidad al aumentar la carga de 0 a nominal es muy pequeño y no supera el 5 %. Es por eso, característica de velocidad El motor de inducción es resistente. La curva tiene una pendiente muy pequeña con respecto al eje horizontal.
Esfuerzo de torsión METRO, desarrollado por el motor, es equilibrado por el par de frenado en el eje Monte y momento METRO 0 , va a superar las pérdidas mecánicas, es decir M= Mt + M 0 =P 2 /Ω 2 + M 0 , dónde R 2 – potencia útil del motor , Ω 2 - velocidad angular del rotor. en reposo M=M 0. Con un aumento de la carga, el par también aumenta y, debido a una ligera disminución de la velocidad del rotor, el aumento del par se produce más rápido que la potencia útil en el eje.
La corriente I1 consumida por el motor de la red varía de manera desigual con el aumento de la carga en el eje del motor. En reposo, el factor de potencia COSφ es pequeño. Y la corriente tiene un gran componente reactivo. Con cargas bajas en el eje del motor, el componente activo de la corriente del estator es menor que el componente reactivo, por lo que el componente activo de la corriente tiene poco efecto sobre la corriente I1. Con cargas altas, el componente activo de la corriente del estator se vuelve mayor que el reactivo, y un cambio en la carga provoca un cambio significativo en la corriente I1.
La dependencia gráfica de la potencia consumida por el motor P1 se representa como una línea casi recta, que se desvía ligeramente hacia arriba con cargas altas, lo que se explica por un aumento de las pérdidas en los devanados del estator y del rotor con el aumento de la carga.
La dependencia del factor de potencia COSφ de la carga en el eje del motor es la siguiente. En reposo, СOSφ es pequeño, alrededor de 0,2. Dado que la componente activa de la corriente del estator, debido a las pérdidas de potencia en la máquina, es pequeña en comparación con la componente reactiva de esta corriente, lo que crea un flujo magnético. Con un aumento de la carga en el eje, СOSφ aumenta, alcanzando el valor máximo de 0,8–0,9, como resultado de un aumento en el componente activo de la corriente del estator. A cargas muy elevadas se produce una ligera disminución del COSφ, ya que como consecuencia de un aumento significativo del deslizamiento y de la frecuencia de la corriente en el rotor, aumenta la reactancia del devanado del rotor.
La curva de eficiencia η tiene la misma forma que en cualquier máquina o transformador. En reposo, eficiencia = 0. Con un aumento en la carga en el eje del motor, la eficiencia aumenta bruscamente y luego disminuye. mayor valor La eficiencia se alcanza con tal carga, cuando las pérdidas de potencia en el acero y las pérdidas mecánicas, que no dependen de la carga, son iguales a las pérdidas de potencia en los devanados del estator y del rotor, que dependen de la carga.
Momento electromagnético
.
Completo potencia mecánica motor
se crea como resultado de la rotación del rotor con una velocidad angular ω 2 bajo la acción del momento M em, es decir
P fur \u003d M em ω 2 (2.19)
Esta potencia se puede determinar a partir del circuito equivalente como energia electrica, que se destaca en la resistencia de carga condicional R bien ", multiplicado por el número de fases del estator:
P piel = m 1 (I 2 ") 2 R 2 " (1-s) / s (2.20)
Con base en (2.19) y (2.20), teniendo en cuenta (2.8), podemos escribir
M em \u003d (m 1 (I 2 ") 2 R 2 "/s) / ω 1 (2.21)
Al calcular el momento de acuerdo con la fórmula (2.21), la corriente yo 2" está determinado por el circuito equivalente (Fig. 2.10) para el deslizamiento correspondiente.
La fórmula (2.21) se puede transformar sustituyendo en ella la expresión de la corriente yo 2", obtenido bajo ciertas suposiciones del circuito equivalente
M em \u003d (m 1 U 1 R 2 "/s) / ω 1 ((R 1 + CR 2 / s) 2 + (x 1 + Cx 2 ") 2) (2.22)
Coeficiente C, que entra en la fórmula (2.22), es el módulo coeficiente complejo DE
= 1 + (z 1 /z metro) que aparece durante la transformación. La suposición es tener en cuenta solo el módulo del coeficiente DE
, porque su argumento en máquinas reales es muy pequeño. En máquinas reales (excluyendo micromáquinas) DE
= 1.03–1.08 y en analisis cualitativo a veces tomar DE
=
1.
La expresión (2.21) también se puede transformar expresando la caída de tensión activa en el rotor Yo 2 "R 2" / s a través de EMF basado en las fórmulas (2.15) y (2.16)
Yo 2 "R 2" /s \u003d E 2 "cos ψ 2 (2.23)
Sustituyendo (2.23) en (2.21) y realizando transformaciones, teniendo en cuenta (2.18) y (2.12), obtenemos
M em \u003d k F m I 2 "cos ψ 2 (2.24)
dónde k- coeficiente constructivo.
Como puede verse en (2.24), el momento electromagnético es directamente proporcional al flujo magnético principal F m y el componente activo de la corriente del rotor yo 2" cos ψ 2.
Las fórmulas de par (2.21), (2.22) y (2.24) se obtienen para el modo motor, pero también son válidas para otros modos, teniendo en cuenta el signo y rango de los valores de deslizamiento s. La dependencia del par electromagnético del deslizamiento se presenta gráficamente en la fig. 2.11 (línea continua).
Este tipo de característica se explica fácilmente usando las fórmulas (2.24), (2.15) y (2.16). Al aumentar el deslizamiento, la corriente del rotor yo 2 aumenta continuamente, pero se vuelve más y más inductivo - disminuye cos ψ 2 a medida que aumenta la frecuencia de las corrientes en el rotor y, en consecuencia, su resistencia inductiva. Como resultado, el componente activo de la corriente del rotor y, en consecuencia, el par electromagnético primero aumentan y luego comienzan a disminuir.
El deslizamiento en el que el momento alcanza el valor máximo M max se llama crítico y se denota por scr. Para determinar scr, es necesario, usando la expresión (2.22), tomar la derivada dM em /ds y lo igualamos a cero. La solución de la ecuación resultante tiene la forma
s cr \u003d ±C R 2 "/ √ (R 1 "+2) (2.25)
Tomando en primera aproximación C 1 ≈ 1 y R 1 ≈ 0, obtenemos
s cr = ±R 2 " /(x1+x2") (2.26)
La mayoría de los motores de inducción requieren una alta eficiencia. Por lo tanto, la resistencia activa de los devanados, en particular R 2 , que determina el nivel de pérdidas eléctricas en el rotor, tiende a ser pequeña. En este caso, el deslizamiento crítico se encuentra en el rango .
Sustituimos (2.25) en (2.22) y obtenemos la expresión para el momento máximo:
M máx = ± m 1 U 1 2 /2 ω 1 C [± R 1 + √(R 1 2 +(x 1 + Cx 2) 2)] (2.27)
El signo "+" se refiere al modo motor, "-" - al modo generador.
Como puede ver, el momento máximo es proporcional al cuadrado tensión de alimentación, no depende de la resistencia activa del circuito del rotor R2 y ocurre con el mayor deslizamiento, mayor es la resistencia activa del circuito del rotor (Fig. 2.11, línea punteada, R2B >R2A).
Par de arranque motor MP está determinada por la expresión (2.22) para s = 1. Sentido MP proporcional al cuadrado de la tensión de alimentación y aumenta con el aumento R2(ver Fig. 2.11), alcanzando un máximo en s cr = 1.
El deslizamiento nominal snom, correspondiente al par nominal Mnom, aumenta al aumentar R 2 . Esto va acompañado de un aumento de las pérdidas eléctricas en el circuito del rotor y una disminución de la eficiencia. Para motores asíncronos con bajo deslizamiento crítico, S nom = 0,02 - 0,06.
Ecuación de equilibrio de momentos en el eje del motor.
El momento electromagnético desarrollado por el motor supera el momento de carga M n aplicado al eje del motor y el propio momento de resistencia del motor M 0 (par de ralentí), determinado por pérdidas mecánicas y adicionales en el motor. El momento resultante determina el valor y el signo de la aceleración del rotor:
dω / dt \u003d (M em - M 0 - M n) / J (2.28)
Dónde j- el momento de inercia de las partes giratorias - el rotor y la carga.
Esta es una ecuación diferencial de movimiento de un accionamiento eléctrico, que consta de un motor y una carga, convertida a la forma
METRO em \u003d METRO 0 + METRO norte + J (dω / dt) (2.29)
llamó la ecuación de equilibrio de momentos en el eje del motor.
En esta ecuación:
METRO 0 + METRO n \u003d METRO st- momento estático de resistencia,
J(dω/dt)= M din es el momento dinámico de resistencia.
Momento electromagnético M uh momento negativo M0 llamado el útil o torque en el eje y denota M2. De las ecuaciones (2.28) y (2.29) se sigue que:
1) si M uh = Calle M, después dω/dt = 0, ω
= const es decir el motor funciona en un modo de estado estable (estático), mientras que M2 = hombre;
2) si M uh> Calle M, entonces la velocidad angular del rotor aumenta, es decir el motor opera en un modo transitorio (dinámico);
3) si M uh< Calle M, entonces la velocidad angular del rotor disminuye, es decir el motor está funcionando en modo transitorio.
A caso general Al compilar la ecuación para el equilibrio de momentos, se deben tener en cuenta los signos de los momentos, que están determinados por la dirección de acción de los momentos con respecto a la dirección de rotación positiva. Si el motor genera un par electromagnético que actúa en sentido positivo, entonces el par se considera positivo ( M uh> 0). Si el motor entra en modo de frenado, su par comienza a actuar en la dirección opuesta ( M uh< 0).
Los momentos estáticos de resistencia creados por el mecanismo de trabajo y el dispositivo de transmisión son de dos tipos: reactivos y activos. Los momentos reactivos de resistencia siempre están dirigidos contra la dirección de rotación, es decir son inhibidores ( Calle M< 0). К реактивным
моментам относятся моменты сил трения, в том числе в самом двигателе, моменты
сопротивления при резании металла на обрабатывающих станках и т.д. Активный момент
всегда действует в одном и том же направлении, независимо от направления вращения,
т.е. может либо препятствовать движению (Calle M> 0), o contribuir a él ( Calle M< 0). К активным
моментам относятся моменты сил тяжести, сил упругости пружин и т.д.
Características mecánicas.
La ecuación de la característica mecánica natural de un motor de inducción es la expresión (2.21) o (2.22) con el deslizamiento S reemplazado por la velocidad angular ω 2 de acuerdo con (2.8) para U 1 = constante. El gráfico característico se muestra en la fig. 2.12, a.

Figura 2.12
Evaluemos la característica mecánica en términos de estabilidad, rigidez y linealidad.
Se considera que el motor en un accionamiento abierto funciona de manera estable si, después de eliminar la perturbación, vuelve automáticamente al punto de funcionamiento inicial en la característica mecánica. Característica mecánica motor es la dependencia de la velocidad angular del rotor en el par electromagnético: ω 2 \u003d f (Mem).La característica mecánica de la carga es la dependencia del momento estático de resistencia en el eje del motor de la velocidad angular: METRO st \u003d f (ω 2).
Teóricamente, la operación de estado estable del motor es posible en puntos un 1 y un 2, dónde M uh=M st.A. Deje que el motor funcione con una carga M st.A \u003d constante en el punto un 1 y aparece una perturbación que provoca un aumento de la velocidad angular??. El motor genera entonces un par correspondiente al punto un 1", y la carga es el momento de resistencia correspondiente al punto un 1. Donde M uh<Calle M, de acuerdo con la ecuación de equilibrio de momento, la velocidad angular ω 2 disminuye y el motor vuelve al punto un 1. volver al punto un 1 también ocurrirá con un incremento negativo de velocidad (punto un 1""). Si el motor está funcionando con carga en el punto un 2, luego, con una perturbación que conduce a un aumento en la velocidad, el motor crea un par correspondiente al punto un 2", y la carga es el momento de resistencia correspondiente al punto un 2. Donde M uh>Calle M y la velocidad angular continúa aumentando, el motor se aleja del punto un 2. volver al punto un 2 no ocurre incluso con un incremento negativo de velocidad (punto un 2""). En este caso, la velocidad seguirá disminuyendo hasta que el motor se detenga.
Por lo tanto, en el punto un 1 el motor funciona constantemente, y en el punto un 2- inestable En el caso general, un signo formal de funcionamiento estable del motor es la desigualdad
(dM em /dω 2)< (dM ст /dω 2) (2.30)
Con un momento de carga que no depende de la velocidad, es decir a M st \u003d contras t, esta desigualdad toma la forma
(dω 2 /dM em)< 0 (2.31)
Con base en el concepto de la estabilidad del motor en un accionamiento abierto, se acostumbra llamar estable a la característica mecánica del motor si garantiza un funcionamiento estable del motor en M st \u003d constante.
Si usamos el criterio de estabilidad formal (2.31), entonces es fácil demostrar que para M st \u003d constante el funcionamiento estable del motor está garantizado sólo en la zona de 1 antes de ω 2cr. Trazar desde ω 2cr hasta 0 es inestable. El rango de operación de pares y velocidades de los accionamientos eléctricos con motores asíncronos se selecciona dentro de la parte estable de las características mecánicas del motor. Punto de carga nominal nombre M se encuentra en el área de trabajo de tal manera que la capacidad de sobrecarga K m \u003d M máx / M nom \u003d 1.7 -3.5. Con baja resistencia del rotor R2 velocidad crítica ω 2cr \u003d (0.8 - 0.9) ω 1 y el área de trabajo es dura. La característica mecánica es generalmente no lineal, pero su área de trabajo es casi lineal.
Dentro del área de trabajo, el motor se autorregula. El aumento en el momento de resistencia en el eje del motor de M st.v antes de M st.s conduce a una disminución en la velocidad angular del rotor de ω 2v antes de ω 2s, un aumento en el EMF y la corriente inducida en el rotor por un campo giratorio y, en consecuencia, un aumento en el momento electromagnético a un valor igual al nuevo valor del momento de resistencia (transición desde el punto A exactamente DE en la característica mecánica).
Características de funcionamiento
.
Las características de rendimiento de un motor de inducción son las dependencias de la velocidad angular del rotor. ω 2, momento útil M 2, eficiencia η
, Factor de potencia cos φ 1(φ 1- cambio de fase entre tu 1 y yo 1) y la corriente del estator yo 1 de la potencia útil P2 en tu 1 = tu nombre y f1 = nombre f(Fig. 2.12, b). Las características de rendimiento pueden tomarse experimentalmente o calcularse utilizando un circuito equivalente.
Al cambiar de x.x. (el motor no está cargado) al modo de carga nominal, la velocidad angular del rotor disminuye ligeramente, porque ω 2 \u003d (1 - s) ω 1, a Nombre S, como se señaló, son unidades de porcentaje. En consecuencia, un momento útil METRO 2 \u003d PAG 2 / ω 2 aumenta de acuerdo con una ley casi lineal. El cambio en la corriente del estator está determinado por la respuesta del rotor; el valor relativamente grande de la corriente en reposo se debe a la presencia de un entrehierro. Actual x.x. principalmente inductivo, y correspondientemente bajo cos φ 10- alrededor de 0,1 - 0,2. A medida que aumenta la carga, aumenta la potencia eléctrica activa consumida y cos φ 1 crece - su valor máximo alcanza 0.7 - 0.9. La corriente conserva un carácter activo-inductivo ( φ 1>0) y la red de alimentación se carga con corriente reactiva. Eficiencia del motor η \u003d R 2 / R 1, dónde R 1- potencia eléctrica activa consumida por el motor. Con poder simétrico R 1 \u003d m 1 U 1 I 1 cos φ 1, dónde tu 1, yo 1– tensión y corriente de fase. Dependencia de la eficiencia en el poder P 2 \u003d P 1 -Δp e -Δp m -Δp piel tiene la misma apariencia que el transformador, porque en el motor, las pérdidas también se dividen en pérdidas fijas y variables. Para máquinas de pequeña y mediana potencia, el máximo valor de eficiencia η
= 0,7 - 0,9, mientras que los valores más bajos se refieren a motores de menor potencia, que tienen una resistencia activa de los devanados relativamente más alta.
Le recomendamos que lea
 Escenario de alimentación saludable "Vitaminas que visitan a los niños
Escenario de alimentación saludable "Vitaminas que visitan a los niños Cómo despertarse rápida y fácilmente por la mañana: consejos fáciles y efectivos
Cómo despertarse rápida y fácilmente por la mañana: consejos fáciles y efectivos Características psicológicas de los niños en la adolescencia.
Características psicológicas de los niños en la adolescencia. Transferir a un niño a otra escuela: el procedimiento y los documentos necesarios Si transferir a un niño a otra escuela
Transferir a un niño a otra escuela: el procedimiento y los documentos necesarios Si transferir a un niño a otra escuela

