El motor eléctrico es la principal fuerza motriz del accionamiento eléctrico. En este artículo se describe qué motor eléctrico elegir para mecanismos lineales.
| Tipo de electromecanismo | Tipo de motor incluido |
| ATL 10, BSA 10 |
con y sin freno |
|
CA monofásica, CA trifásica, DS 24/12 V con y sin freno |
|
|
CA trifásica con y sin freno |
|
| UAL 0 UBA 0 | DS 24 V 12 V con y sin freno |
|
CA monofásica, CA trifásica, DS 24/12 V con y sin freno |
Características técnicas principales
Antes de elegir un motor, es importante comprender las siguientes características físicas:
Potencia nominal - potencia mecánica, medido en el eje, se expresa en unidades de Watt o KiloWatt. Sin embargo, en algunos productos, la potencia se calcula en caballos de fuerza.
Tensión nominal - la tensión que debe aplicarse a los terminales del motor, de acuerdo con las especificaciones.
Par estático(par de arranque) es el par mínimo que el motor puede proporcionar, con el rotor en ralentí y tensión de frecuencia nominal.
Par intermedio- el valor mínimo del par que se desarrolla al alimentar el motor con una tensión y frecuencia nominales, desde 0 rpm hasta una velocidad correspondiente al par máximo.
Par máximo - momento máximo, que el motor puede desarrollar durante el funcionamiento con la tensión nominal y el suministro de frecuencia.
Par nominal- el par corresponde a la potencia nominal ya la velocidad nominal.
El par nominal se calcula mediante la fórmula:
Pn - potencia nominal, kW
n- número nominal de revoluciones, rpm
Velocidad síncrona, calculada a partir de la traza. fórmula:
![]()
f - alimentación de frecuencia, Hz
p - número de pares de polos
Diagrama de par

Condiciones de operación
Humedad: los equipos eléctricos deben funcionar con una humedad relativa del 30 % al 90 % (sin condensación)
Es necesario eliminar los efectos negativos de la condensación accidental por medio de un recinto protegido de equipos eléctricos o, si es necesario, con medidas adicionales (por ejemplo, equipo de calefacción incorporado o sistema de aire acondicionado, orificios de drenaje).
La altitud y temperatura indicadas en el catálogo de potencias están previstas para un uso regular a una altitud inferior a 1000 m sobre el nivel del mar y a temperatura ambiente de +5 °C a +40 °C para motores con potencia nominal inferior a 0,6 kW, o a temperaturas de -15 °C a 40 °C para motores de potencia nominal igual o superior a 0,6 kW. En otras condiciones de funcionamiento (mayor altitud y/o temperatura) los valores cambian según el coeficiente indicado en el gráfico.

Los motores trifásicos o monofásicos tienen un sentido de movimiento en el sentido de las agujas del reloj. En sentido antihorario - bajo pedido.
Voltaje - Frecuencia: cambio máximo en el suministro de voltaje +/-10%. Con esta tolerancia, los motores suministran la potencia nominal. El funcionamiento a largo plazo dentro de estos límites puede aumentar la temperatura en 10 grados C. El devanado estándar está clasificado para 230/400 V, 50 Hz. Otros voltajes de frecuencia están disponibles bajo pedido.
Velocidad - par: a excepción de la versión de cuatro polos, los motores son estándar. No se recomienda utilizar pares superiores a los nominales.
El devanado del estator está hecho de esmaltado alambre de cobre(clase H, 200 grados), con poliamidas de éteres de poliamida modificados.
La clase de aislamiento F está impregnada con polímeros, lo que proporciona un alto grado de protección contra el estrés electrostático y el estrés mecánico. El bobinado es hermético, sin bolsas de aire y con un alto grado de transferencia de calor. Otros materiales a partir de los cuales se realiza la producción en serie de bobinados tienen clase de aislamiento B, pero bajo pedido ponemos clase H.
Motores tropicales y marinos: alto grado de protección, que se utiliza para motores que operan en climas tropicales con alto grado de humedad y condiciones adversas de operación, el devanado está recubierto con una capa de gliceroftálica de alta calidad, que tiene excelentes características protectoras.
| Marca | Una fotografía | Tipo de | Voltaje y frecuencia | Gama de dimensiones y capacidades | notas |
| METRO | Asincrónico motores electricos trifasicos diseño industrial general |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V RPM: 3000/1500/1000/750 |
Dimensiones, mm: 50-160 Potencia, kW: 0,02-18,7 |
Tallas 71-160 adaptadas al uso con control de frecuencia. Ventilador de eje, clase de protección IP 55F |
|
| D.P. | Motores eléctricos asíncronos trifásicos de varias velocidades |
V/Hz: 400/50 +/- 10%V 3000/1000, 3000/750, 1000/750, 3000/750 |
Dimensiones, mm: 63-160 Potencia, kW: 0,06-18,7 |
Ventilador del eje del motor, clase de protección IP55F | |
| mq | Motores eléctricos asíncronos trifásicos con carcasa cuadrada |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V RPM: 1500 |
Dimensiones, mm: 63-90 Potencia, kW: 0,18-1,5 |
Los tamaños 80-90 están adaptados para su uso con control de frecuencia. Ventilador de eje, clase de protección IP55F |
|
| milímetro | Asincrónico motores eléctricos monofásicos con condensador incorporado |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensiones, mm: 50-100 Potencia, kW: 0,045 - 2,2 |
ventilador de eje. Clase de protección IP55F. Entrega con incorporado o condensador acoplado. |
|
|
con relé de corte de tensión |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensiones, mm: 63-100 Potencia, kW: 0,187 - 2,2 |
Ventilación forzada. Clase de protección IP55F. Suministrado con integrado o condensador acoplado. Interruptor centrífugo. Relé de suministro/apagado de voltaje incorporado |
||
| MDE | Motores eléctricos asíncronos monofásicos con relé electrónico incorporado |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensiones, mm: 63-100 Potencia, kW: 0,187 - 2,2 |
ventilador de eje. Clase de protección IP55F. Se suministra con condensador incorporado o adjunto. Equipado con un relé de arranque electrónico. |
|
| MAMÁ | Motores eléctricos asíncronos trifásicos con freno |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V RPM: 3000/1500/1000/750 |
Dimensiones, mm: 55-160 Potencia, kW: 0,02 - 18,7 |
ventilador de eje. Clase de protección IP55F. Clase de protección del freno IP44, bajo pedido IP55. Posible |
|
| MADP | Motores eléctricos asíncronos trifásicos multivelocidad con freno |
V/Hz: 400/50 +/- 10%V RPM: 3000/1500, 1500/1000, 1500/750, 3000/1000, 3000/750, 1000/750, 3000/500 |
Dimensiones, mm: 63-160 Potencia, kW: 0,06 - 18,7 |
Entrega con doble freno y desbloqueo manual. |
|
| artes marciales mixtas | Motores eléctricos asíncronos monofásicos con freno |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensiones, mm: 50-100 Potencia, kW: 0,09 - 2,2 |
ventilador de eje. Clase de protección IP55F. Clase de protección del freno IP44, bajo pedido IP55. Posible Entrega con doble freno y desbloqueo manual. |
|
|
Motores eléctricos asíncronos monofásicos con interruptor centrífugo con relé de corte de tensión con freno |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensiones, mm: 63-100 Potencia, kW: 0,187 - 2,2 |
ventilador de eje. Clase de protección IP55F. Clase de protección del freno IP44, bajo pedido IP55. Posible Entrega con doble freno y desbloqueo manual. |
||
|
Motores eléctricos asíncronos monofásicos con relé electrónico incorporado con freno |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensiones, mm: 63-122 Potencia, kW: 0,187 - 2,2 |
ventilador de eje. Clase de protección IP55F. Clase de protección del freno IP44, bajo pedido IP55. Posible Entrega con doble freno y desbloqueo manual. |
||
|
Motores de control vectorial (Servomotores) |
Red monofásica: V/Hz: 230/50-60 +/-10 % V Red trifásica: V/Hz: 400/50-60 +/-10 % V RPM: 3000 |
Dimensiones, mm: 63 - 160 Momento, N * m: 2.6 - 42 |
Programación a través de control remoto o computadora |
||
|
Motores eléctricos con encoders incorporados |
Red monofásica: V/Hz: 230/50-60 +/-10 % V Red trifásica: V/Hz: 400/50-60 +/-10 % V RPM: 3000 |
Dimensiones, mm: 63 - 160 Momento, N * m: 2,6 - 160 |
Conservación del par a una velocidad de rotación de 0 a la máxima. Alta precisión de posicionamiento. Ventilación forzada |
||
|
Motores eléctricos con variadores de velocidad incorporados |
Red monofásica: V/Hz: 230/50-60 +/- 10 % V Red trifásica: V/Hz: 400/50-60 +/-10 % V Número de polos: 2/4/6 |
Dimensiones, mm: 71 - 112 Momento, kW: 0,12 - 4 |
Versión económica del motor eléctrico con control de frecuencia. Ventilación forzada Freno incorporado, dispositivo de protección térmica. Control remoto. |
Por todas las categorías Marcas Sensores de presión, encoder Unidades condensadoras Arrancadores suaves Convertidores de frecuencia Bombas Rompedores de circuito termostatos Subestaciones transformadoras Transformadores de potencia Motorreductores Estaciones de control Cuadros eléctricos Términos Motores eléctricos
Uno de los parámetros importantes del motor eléctrico, que es igual de importante a la hora de elegirlo, es el par. Este valor está determinado por el producto de la fuerza aplicada al brazo de palanca y depende únicamente del grado de carga. Si en los motores de combustión interna esta carga la da el cigüeñal, entonces el valor del par se obtiene a partir de las corrientes de excitación. En este caso, la magnitud de este momento dependerá de la velocidad del dispositivo que gira en el campo magnético del estator, llamado rotor. Según el período y el método de determinación, el par se divide en:
- estático (arranque) - momento mínimo de inactividad;
- intermedio: desarrolla el valor durante el funcionamiento del motor desde 0 rpm hasta el valor máximo en el valor de voltaje nominal;
- máximo - desarrollo durante el funcionamiento del motor;
- nominal - corresponde valores nominales potencia y rpm.
Para calcular el valor del par, que se define en "kgm" (kilogramo por metro) o "Nm" (newton por metro), muchos manuales eléctricos ofrecen fórmulas especiales que tienen en cuenta, además de la acción principal de la rotación campo magnético una serie de factores diferentes, por ejemplo:
- tensión de red;
- el valor de la resistencia inductiva y activa;
- depende del aumento del deslizamiento.
Pero, el crecimiento de deslizamiento no siempre trae un gran impulso. A menudo, cuando se alcanzan valores críticos, se observa su fuerte disminución. Este fenómeno se denomina momento de vuelco. Uno de los dispositivos que estabilizan la velocidad de rotación del rotor y, por lo tanto, la magnitud del par es convertidor de frecuencia, cuyo uso es ahora muy común en todas las áreas donde el éxito de múltiples tareas de producción depende del control del motor.
Elección de un motor eléctrico para par
Para la elección requerida para el desempeño de ciertas tareas del motor eléctrico, se tienen en cuenta casi todas sus características, desde indicadores de potencia hasta parámetros de peso y tamaño. Cada uno de los elementos es importante a su manera para resolver los matices. No menos importante es el par. Debido al hecho de que el par está directamente relacionado con las revoluciones en la relación: cuanto mayores sean las revoluciones, menor será el momento, la elección del motor eléctrico se basará en los siguientes matices:
- de los requisitos de velocidad. En este caso, será más útil elegir un motor de par bajo para los que trabajan con fuerzas bajas y alta velocidad, y de par de arranque medio o alto para los que trabajan en modos mejorados. A bajas velocidades;
- voltajes de arranque. Aquí, la fuerza primaria se tiene en cuenta, por ejemplo, para controlar el ascensor, se deben seleccionar motores de alta velocidad. par de arranque capaz de levantar grandes cargas desde el principio. Aunque muchos artículos sobre motores eléctricos También se recomienda utilizar arrancadores suaves que puedan proteger contra sobrecargas no deseadas.
Vale recordar que la elección no se hace de acuerdo con uno de los indicadores, incluso cuando se orienta en relación con el par, porque cada uno de los indicadores se orienta de acuerdo con la predisposición de trabajo del dispositivo de accionamiento eléctrico y sus cargas de trabajo en el funcionamiento estadístico y dinámico. condiciones especificadas por la propia empresa.
En esta sección hemos colgado una selección de artículos dedicados a un concepto tan importante en la teoría de la pulsión asíncrona como el momento. Aquí los lectores encontrarán materiales que revelan los significados de los términos individuales relacionados de una forma u otra con el concepto del momento. Adicionalmente, hemos organizado una selección de artículos con fórmulas mediante las cuales puedes calcular valores específicos de los momentos o construir sus dependencias. Para mayor claridad, aquí también puede encontrar ejemplos que ilustran el uso de fórmulas para calcular un indicador en particular.
momento de carga es el momento generado por la rotación sistema mecánico unido al eje Motor de inducción. El término momento de resistencia se encuentra como sinónimo en la literatura. El par de carga depende de los parámetros geométricos y físicos de los cuerpos incluidos en la cadena cinemática unida al eje del motor. Como regla general, al calcular el momento de resistencia, se acostumbra llevarlo al eje del motor.
Par de frenado- momento desarrollado máquina asíncrona, en modo de frenado. En la literatura existe un sinónimo del término: par de frenado. En el marco de la teoría motores eléctricos asíncronos Se consideran 3 modos de frenado: frenado regenerativo, dinámico y de corriente inversa.
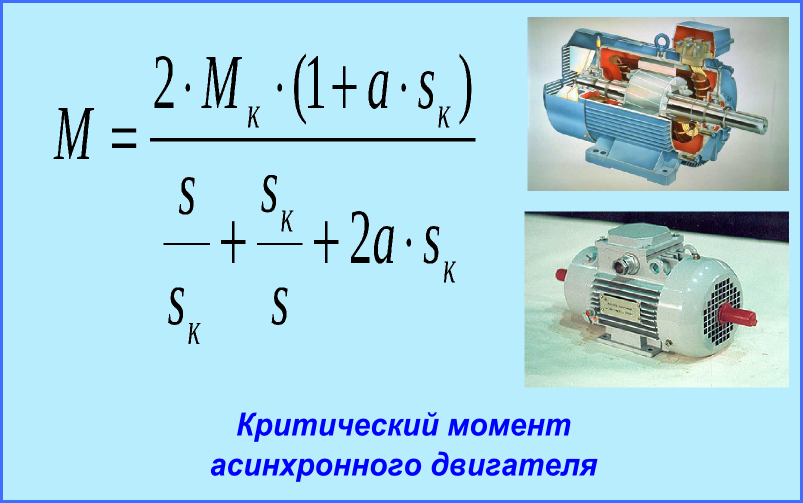 Momento crítico de un motor de inducción. – valor más alto momento desarrollado por el motor eléctrico. El momento alcanza este valor en el deslizamiento crítico. Si el par de carga en el eje del motor es mayor que el par crítico, el motor se detendrá.
Momento crítico de un motor de inducción. – valor más alto momento desarrollado por el motor eléctrico. El momento alcanza este valor en el deslizamiento crítico. Si el par de carga en el eje del motor es mayor que el par crítico, el motor se detendrá.
 Par nominal del motor asíncrono- el momento que se produce en el eje del motor a la potencia y velocidad nominales. Se entiende por datos nominales los datos que se determinan cuando el motor está funcionando en el modo para el que fue diseñado y fabricado.
Par nominal del motor asíncrono- el momento que se produce en el eje del motor a la potencia y velocidad nominales. Se entiende por datos nominales los datos que se determinan cuando el motor está funcionando en el modo para el que fue diseñado y fabricado.
| Concepto de momento |
 Momento electromagnético- el momento que ocurre en el eje del motor cuando fluye a través de sus devanados corriente eléctrica. En la literatura se encuentran sinónimos de este término: par motor o par motor eléctrico. También se encuentran a menudo variaciones con una formulación más detallada: par electromagnético o par electromagnético.
Momento electromagnético- el momento que ocurre en el eje del motor cuando fluye a través de sus devanados corriente eléctrica. En la literatura se encuentran sinónimos de este término: par motor o par motor eléctrico. También se encuentran a menudo variaciones con una formulación más detallada: par electromagnético o par electromagnético.
Este es uno de los parámetros clave de la teoría, que determina la capacidad de un motor asíncrono para hacer girar la carga conectada a su eje en los modos estático y dinámico requeridos. Por este motivo, a la hora de decidir si utilizar el motor para una tarea específica, es importante tener en cuenta la naturaleza del comportamiento del par electromagnético. en el mismo caso general momento electromagnético en el eje del motor está determinado por la fórmula: Mem \u003d (? Ef x If) /? 2
 En el marco de la teoría moderna de la asincronía Maquinas electricas utilizar una serie de términos relacionados con el concepto de momento. Algunos de estos términos se refieren al momento creado en el eje (en el rotor) del motor eléctrico. Otro grupo de términos define los momentos creados por una carga mecánica conectada al eje de un motor eléctrico.
En el marco de la teoría moderna de la asincronía Maquinas electricas utilizar una serie de términos relacionados con el concepto de momento. Algunos de estos términos se refieren al momento creado en el eje (en el rotor) del motor eléctrico. Otro grupo de términos define los momentos creados por una carga mecánica conectada al eje de un motor eléctrico.
Estos términos definen tanto el momento desarrollado por el motor como los diversos estados del momento en el eje de salida del motor. El estado significa el valor del momento en los puntos críticos. Por ejemplo, par nominal o par de arranque.
Le recomendamos que lea
, diagnóstico, tratamiento Tratamiento de la clamidia urogenital") Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital
Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué
Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército?
Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército? Manzanas al horno con requesón Manzanas al horno con requesón
Manzanas al horno con requesón Manzanas al horno con requesón

