Enviar su buen trabajo en la base de conocimiento es simple. Utilice el siguiente formulario
Los estudiantes, estudiantes de posgrado, jóvenes científicos que utilizan la base de conocimientos en sus estudios y trabajos le estarán muy agradecidos.
Alojado en http://www.allbest.ru/
ucranio academia estatal transporte ferroviario
Centro de Formación Científica y Práctica
de la disciplina "Ingeniería Eléctrica"
"Motor corriente continua con excitación paralela
Plan
1. Introducción
2. Diseño de motores de CC
3. Motores de arranque
4. Datos técnicos de los motores
5. Características del motor de corriente continua
6. Característica mecánica
7. Lista de literatura utilizada
Un motor de corriente continua (DC motor) es un convertidor de energía eléctrica de corriente continua en energía mecánica. El diseño del motor se muestra en la Fig.1. Tiene tres partes principales: el estator (inductor), la armadura y el colector.
El inductor (1) - la parte fija de la máquina, es un cilindro hueco de acero fundido fabricado en acero eléctrico, al que en el interior los núcleos (postes) se sujetan con pernos. En los núcleos hay un devanado de excitación (OB) conectado a las escobillas. El inductor está diseñado para crear el principal campo magnético. El ancla (2) (parte interna giratoria de la máquina) es un cilindro ensamblado a partir de láminas de acero. Se coloca un devanado de ancla en las ranuras de la armadura. El colector (3) está fijado en el mismo eje que el inducido, que es un cilindro hueco formado por placas de cobre individuales (láminas) aisladas entre sí y del eje del inducido y conectadas eléctricamente a partes individuales del devanado del inducido. El propósito del colector es la rectificación mecánica de campos electromagnéticos sinusoidales variables en un voltaje constante en magnitud y dirección, que se retira al circuito externo usando escobillas adyacentes al colector. Las propiedades de los motores de CC están determinadas principalmente por la forma en que se alimenta el devanado de campo. En este sentido, los motores DC se clasifican en 2 tipos: con excitación independiente(Fig. 2a) y autoexcitación (Fig. 2 b, c, d)
El devanado de excitación en un DCT con excitación independiente es alimentado por una fuente de CC separada (desde un rectificador de semiconductores, batería o excitador - generador de CC).
En los DCT autoexcitados, los circuitos de armadura e inductor están conectados eléctricamente, es decir, el devanado de excitación es alimentado por el EMF de la armadura de la máquina.
Dependiendo de circuito eléctrico las conexiones de los devanados del inducido y el inductor de una máquina con autoexcitación se dividen además en tres tipos: excitación paralela, en serie y mixta (Fig. 2 b, c, d). DPT, como todas las máquinas eléctricas, es reversible, es decir, son sin significativo constructivo
los cambios pueden funcionar tanto en el modo del generador como en el modo del motor. Modo de funcionamiento DPT con excitación en paralelo. Considere la operación de un DPT con excitación paralela (Fig. 2b). Cuando el motor está conectado a una red de CC, surgen corrientes en ambos devanados. En este caso, en el devanado de excitación, la corriente de excitación IB crea un campo magnético del inductor.
La interacción de la corriente de armadura con el campo magnético del inductor crea un momento electromagnético del ME.
ME = sFIYA, (1)
donde c es un coeficiente constante;
IЯ - corriente de armadura;
Ф - flujo magnético.
El momento electromagnético del ME difiere del momento del MW en el eje del motor por el valor del momento de las pérdidas al ralentí MHH, que, debido a su pequeñez, se puede despreciar y suponer que
Se induce una fuerza contraelectromotriz E en los conductores de la armadura giratoria:
donde n es la velocidad de rotación del inducido;
k es un factor constante.
La ecuación de equilibrio eléctrico del motor tiene la forma:
U \u003d E + Iß RY \u003d knФ + Iß RY, (3)
donde U es la tensión de alimentación de la red.
Arrancando el motor
Al arrancar el motor, el inducido está estacionario en el primer momento (n = 0) y dada (2) la FEM del inducido E = knF = 0. En este caso, de acuerdo con (3), la corriente de arranque de la armadura IYaP es inaceptablemente grande, porque R es pequeño y se define como:
Por lo tanto, para limitar la corriente de arranque, la resistencia del reóstato de arranque RP se introduce en serie en el circuito del inducido, que se introduce por completo antes de arrancar el motor y sale después de que el motor acelera a medida que aumenta la EMF (E) trasera.
Tal arranque del motor protege su devanado de armadura de las altas corrientes de arranque INP y le permite obtener el máximo flujo magnético en este modo.
Si el motor arranca al ralentí, no es necesario desarrollar el par máximo MB en el eje. Por lo tanto, el motor se puede arrancar aumentando suavemente el voltaje de suministro U.
marcha atrásmotor.
Se puede cambiar la dirección de rotación del motor cambiando la corriente en el devanado del inducido o en el devanado de campo, porque. esto cambia el signo del torque. El cambio simultáneo en la dirección de la corriente en ambos devanados no cambia la dirección de rotación del motor. El cambio de los extremos de los devanados debe realizarse solo después de que el motor se haya detenido por completo.
Regulaciónvelocidadrotación.
A partir de la expresión (3) es posible determinar la velocidad de rotación del motor:
devanado de suministro de corriente continua del motor
Se puede ver en la fórmula (6) que la velocidad de rotación de un motor de CC se puede controlar cambiando el voltaje de la red, el flujo magnético de excitación y la resistencia del circuito del inducido. La forma más común de controlar la velocidad de rotación del motor es cambiar el flujo magnético por medio de un reóstato de ajuste en el circuito de excitación.
La reducción de la corriente de excitación debilita el flujo magnético y aumenta la velocidad de rotación del motor. Este método es económico porque la corriente de excitación (en motores de excitación en paralelo) es del 3 al 5% de la entrada del inducido, y las pérdidas de calor en el reóstato de control son muy pequeñas. Características principales del motor de CC con excitación paralela
El funcionamiento de un motor DC con excitación en paralelo se evalúa por las siguientes características principales:
Característica de ralentí: (fig.3)
n0 = ѓ (IB), con U = UN = const y Iß = I0,
donde n0 es la velocidad de ralentí (sin carga),
I0 - corriente sin carga de 5 - 10% IH;
ONU - valor nominal tensión de red
Teniendo en cuenta que al ralentí el producto IßRß es pequeño en comparación con U, entonces a partir de (6) la velocidad del motor se determina por la relación inversa al flujo magnético Ф:
Con un aumento de la corriente en el devanado de excitación, el flujo magnético cambia a lo largo de la curva de magnetización Ф = ѓ (IВ), por lo que la relación entre la velocidad de rotación del motor n y la corriente de excitación IВ es casi hiperbólica. A valores bajos de la corriente de excitación, las revoluciones cambian casi inversamente. A altas corrientes de excitación,
la saturación magnética de los polos de acero tiene un efecto, y la curva se vuelve más plana y corre casi paralela al eje de abscisas. Un cambio brusco: una disminución en la corriente de excitación, así como una interrupción accidental del circuito de excitación de acuerdo con (9) puede hacer que el motor "funcione" (cuando IВ > 0, y por lo tanto Ф también tiende a 0, n > ?).
Característica mecánica. Esta es la dependencia de la velocidad de rotación del rotor del par de MT en el eje del motor a una tensión de alimentación de red y una corriente de excitación constantes:
n \u003d ѓ (MV), con U \u003d UH \u003d const, IВ \u003d const.
Para un motor de excitación en paralelo, el momento MV es proporcional al primer grado de la corriente de armadura Iß. Por lo tanto, la característica mecánica se puede representar mediante la dependencia n (Ib), que se denomina electromecánica o de velocidad (Fig. 4).
Se aplica una carga (par de frenado) al eje del motor. De acuerdo con (6), a valores constantes de la corriente de excitación, una disminución en la velocidad de rotación n es consecuencia de la caída de voltaje en el circuito del inducido - IЯ·RЯ y la reacción del inducido. Con un aumento de la carga, la velocidad de rotación disminuye en una cantidad insignificante, del orden del 3-8%. Esta característica de velocidad se llama rígida. Característica reguladora (Fig. 5). Esta es la dependencia de la corriente de excitación IB de la corriente de armadura IA en Voltaje constante red U y velocidad de rotación constante n:
IВ \u003d ѓ (IЯ) en U \u003d UN, n \u003d const.
Del análisis de la característica externa, se puede ver que la velocidad de rotación disminuye al aumentar la carga.
La característica de control permite juzgar cómo, dentro de qué límites, es necesario regular la corriente en el devanado de excitación para mantener una velocidad de rotación constante.
Técnica experimental
El estudio de los modos de funcionamiento del DPT con excitación paralela se lleva a cabo en
complejo educativo modular MUK-EP1, que consta de:
fuente de alimentación del motor de CC BPP1;
Fuente de alimentación para motor asíncrono BPA1
Unidad de máquina eléctrica MA1-AP.
PL073U3 (220 V, 180 W,
1500 rpm). Conmutación automática de bobinados de motor y conexión de medición.
dispositivos se lleva a cabo en el bloque BPP1.
Utilizado como carga motor asincrónico(BP) en el modo frenado dinámico. Conmutación automática de bobinados BP y conexión. instrumentos de medición a ello se realiza en el bloque BPA1.
El esquema de operación del complejo después de cambiar los bloques se muestra en la Fig.6.
Bibliografía
1. Katsman M. M. Coches eléctricos. - M.: Superior. escuela, 1993.
2. Kopylov I.P. Coches eléctricos. - M.: Energía atomizada, 1986
Alojado en Allbest.ru
...Documentos similares
El principio de funcionamiento y el dispositivo de los generadores de CC. Fuerza electromotriz y par electromagnético del generador de CC. Métodos de excitación de generadores de corriente continua. Características y características de los motores. varios tipos excitación.
resumen, añadido el 12/11/2009
Control de velocidad de motores DC cambiando el flujo de excitación. Máxima protección actual del accionamiento eléctrico. Características de velocidad del motor. Esquemas de circuitos de potencia de motores DC y motores asíncronos.
documento final, agregado el 30/03/2014
El principio de funcionamiento del generador de CC. Devanados de anclaje y el proceso de excitación de máquinas de corriente continua. Bobinado con sección "muerta". Un ejemplo de un bucle simple y un devanado ondulado. motor CC con excitación secuencial.
presentación, añadido el 09/11/2013
Diseño y principio de funcionamiento. Maquinas electricas corriente continua. Estudio de las características de carga, externas y de control y propiedades de operación de un generador con excitación independiente. Características de arrancar un motor con un sistema de excitación en paralelo.
trabajo de laboratorio, añadido el 09/02/2014
Estudio de las características mecánicas de motores de corriente continua con excitación paralela, independiente y serie. modos de frenado. motor eléctrico corriente alterna con rotor de fase. Estudio de circuitos de arranque de motores, funciones de tiempo.
trabajo de laboratorio, añadido el 23/10/2009
El principio de funcionamiento y el dispositivo del generador de CC. Tipos de devanados de armadura. Métodos de excitación de generadores de corriente continua. Reversibilidad de las máquinas de corriente continua. Motor de excitación paralela, independiente, serie y mixta.
resumen, añadido el 17/12/2009
Diseño de motores de CC. El núcleo de las principales ventajas, el tipo y el paso del devanado del inducido. El número de vueltas de bobinado, placas colectoras, ranuras. Característica de magnetización del motor. La masa de los cables del devanado del inducido y los principales indicadores dinámicos.
trabajo final, agregado el 21/05/2012
Suministro de energía del motor durante el control de velocidad cambiando el valor de voltaje desde una fuente de CC regulada separada. Aplicación de convertidores de tiristores en accionamientos eléctricos de corriente continua. esquema estructural convertidor de tiristores
documento final, agregado el 01/02/2015
Modelado del arranque del motor DC DP-62 para el accionamiento del carro de lingotes utilizando el paquete SciLab. Diagrama de bloques del modelo, sus elementos. Datos de pasaporte del motor DP-62, tipo de excitación. Diagrama transitorio, trazado.
trabajo de laboratorio, añadido el 18/06/2015
Características del cálculo del motor DC desde la posición del objeto de control. Cálculo de convertidor de tiristores, sensores de accionamiento eléctrico y sensor de corriente. Esquema de un motor DC con excitación independiente. Modelado del contorno exterior.
capitulo 29
Conceptos básicos
METRO, giratorio.
antielectromotriz
![]() .
(29.1)
.
(29.1)
![]() , (29.3)
, (29.3)
![]() ,
,
![]() .
.
Pero, según (25.24),
![]()
![]() , (29.4)
, (29.4)
![]() .
.
METRO, .
es decir. tu o disminución en el flujo F ;
tu, F
F
De arranque del motor
tu .
reóstatos de arranque
R O 1
![]() .
.
Al mismo tiempo a través de la palanca R y neumático W R,
,
METRO directamente proporcional al caudal F F
capitulo 29
Conceptos básicos
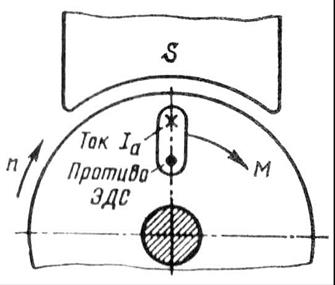
Las máquinas colectoras tienen la propiedad de la reversibilidad, es decir, pueden funcionar tanto en modo generador como en modo motor. Por lo tanto, si una máquina de CC está conectada a una fuente de alimentación de CC, aparecerán corrientes en el devanado de excitación y en el devanado del inducido de la máquina. La interacción de la corriente del inducido con el campo de excitación crea un momento electromagnético en el inducido. METRO, que no es el frenado, como ocurría en el generador, sino giratorio.
Bajo la influencia momento electromagnético armadura, la máquina comenzará a girar, es decir, la máquina funcionará en modo motor, consumiendo energía eléctrica de la red y convirtiéndola en energía mecánica. Durante el funcionamiento del motor, su armadura gira en un campo magnético. Se induce un FEM en el devanado del inducido, cuya dirección puede determinarse mediante la regla de la "mano derecha". Por su naturaleza, no difiere de la FEM inducida en el devanado del inducido del generador. En el motor, la FEM se dirige contra la corriente y, por lo tanto, se llama antielectromotriz(contra-EMF) de la armadura (Fig. 29.1).
Para un motor que funciona a una velocidad constante,
![]() .
(29.1)
.
(29.1)
De (29.1) se deduce que el voltaje suministrado al motor está balanceado por la fuerza contraelectromotriz del devanado del inducido y la caída de voltaje en el circuito del inducido. Basado en (29.1) corriente de armadura
Multiplicando ambos lados de la ecuación (29.1) por la corriente de armadura, obtenemos ecuación de potencia para circuito de armadura:
![]() , (29.3)
, (29.3)
¿Dónde está la potencia en el circuito del devanado del inducido? - potencia de pérdidas eléctricas en el circuito del inducido.
Para aclarar la esencia de la expresión, realizaremos la siguiente transformación:
![]() ,
,
![]() .
.
Pero, según (25.24),
![]()
![]() , (29.4)
, (29.4)
donde es la frecuencia angular de rotación de la armadura; - potencia electromagnética del motor.
Por lo tanto, la expresión es potencia electromagnética del motor.
Transformando la expresión (29.3) teniendo en cuenta (29.4), obtenemos
![]() .
.
Un análisis de esta ecuación muestra que con un aumento en la carga en el eje del motor, es decir, con un aumento en el par electromagnético METRO, aumenta la potencia en el circuito del devanado del inducido, es decir, la potencia en la entrada del motor. Pero como el voltaje suministrado al motor se mantiene sin cambios, el aumento en la carga del motor va acompañado de un aumento en la corriente en el devanado del inducido. .
Según el método de excitación, los motores de CC, así como los generadores, se dividen en motores con excitación de imanes permanentes (magnetoeléctricos) y con excitación electromagnética. Estos últimos, de acuerdo con el esquema para encender el devanado de excitación en relación con el devanado del inducido, se dividen en motores de excitación paralelos (derivación), serie (serie) y mixtos (compuestos).
Según la fórmula EMF, la velocidad del motor (rpm)
Sustituyendo el valor de (29.1), obtenemos (rpm)
es decir. la velocidad del motor es directamente proporcional a la tensión e inversamente proporcional al flujo de excitación. Físicamente, esto se explica por el hecho de que el aumento de voltaje tu o disminución en el flujo F provoca un aumento en la diferencia ; esto, a su vez, conduce a un aumento en la corriente [ver Fig. (29.2)]. Como resultado, el aumento de corriente aumenta el par, y si el par de carga permanece sin cambios, la velocidad del motor aumenta.
De (29.5) se deduce que la velocidad del motor se puede controlar cambiando el voltaje tu, suministrado al motor, o el flujo magnético principal F, o resistencia eléctrica en el circuito del inducido.
La dirección de rotación de la armadura depende de las direcciones del flujo magnético de excitación. F y corriente en el devanado del inducido. Por lo tanto, al cambiar la dirección de cualquiera de estas cantidades, puede cambiar la dirección de rotación de la armadura. Debe tenerse en cuenta que cambiar los terminales comunes del circuito en el interruptor de cuchilla no cambia la dirección de rotación de la armadura, ya que esto cambia simultáneamente la dirección de la corriente tanto en el devanado de la armadura como en el devanado de excitación.
De arranque del motor
La corriente de armadura del motor está determinada por la fórmula (29.2). Si acepta tu y sin cambios, entonces la corriente depende del back-EMF . La corriente alcanza su valor máximo cuando se arranca el motor. En el momento inicial del arranque, la armadura del motor está estacionaria y no se induce FEM en su devanado. Por lo tanto, cuando el motor está conectado directamente a la red, se produce una corriente de irrupción en el devanado de su armadura.
Por lo general, la resistencia es pequeña, por lo que el valor de la corriente de arranque alcanza valores inaceptablemente grandes, 10-20 veces más altos que Corriente nominal motor.
Una corriente de arranque tan grande es muy peligrosa para el motor. En primer lugar, puede causar un incendio generalizado en la máquina y, en segundo lugar, con tal corriente, se desarrolla un par de arranque excesivamente grande en el motor, lo que tiene un efecto de choque en las partes giratorias del motor y puede destruirlas mecánicamente. Y por último, esta corriente provoca una fuerte caída de tensión en la red, lo que repercute negativamente en el funcionamiento de otros consumidores incluidos en esta red. Por lo tanto, el arranque del motor por conexión directa a la red (arranque no reostático) generalmente se usa para motores con una potencia de no más de 0,7-1,0 kW. En estos motores, debido a la mayor resistencia del devanado del inducido y las pequeñas masas giratorias, el valor de la corriente de arranque es solo de 3 a 5 veces mayor que la corriente nominal, lo que no representa un peligro para el motor. En cuanto a los motores de mayor potencia, al arrancarlos suelen limitar la corriente de arranque. reóstatos de arranque(PR), incluidos en serie en el circuito del inducido (arranque reostático).
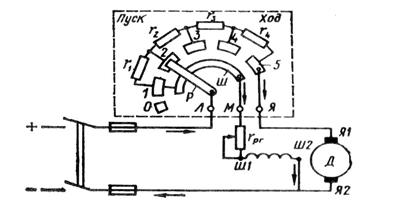
Antes de arrancar el motor, necesita una palanca R poner el reóstato en contacto inactivo O(Figura 29.2). Luego encienda el interruptor de cuchilla, mueva la palanca al primer contacto intermedio 1
y el circuito de la armadura del motor está conectado a la red a través de la resistencia más alta del reóstato ![]() .
.
Arroz. 29.2. Esquema de encendido del reóstato de arranque.
Al mismo tiempo a través de la palanca R y neumático W un devanado de excitación está conectado a la red, cuya corriente durante todo el período de arranque no depende de la posición de la palanca R, ya que la resistencia de la barra es despreciable comparada con la resistencia del devanado de excitación.
Corriente de armadura de arranque a la impedancia del reóstato de arranque
Con el advenimiento de la corriente en el circuito de la armadura, se produce un par de arranque, bajo cuya influencia comienza la rotación de la armadura. A medida que aumenta la velocidad, aumenta la fuerza contraelectromotriz , lo que conduce a una disminución de la corriente de arranque y del par de arranque.
A medida que la armadura del motor acelera, la palanca del reóstato de arranque cambia a las posiciones 2, 3, etc. En la posición 5 de la palanca del reóstato, finaliza el arranque del motor. La resistencia del reóstato de arranque generalmente se elige de modo que la corriente de arranque más grande exceda la corriente nominal en no más de 2-3 veces.
Dado que el par motor METRO directamente proporcional al caudal F[cm. (25.24)], luego para facilitar el arranque del motor de excitación paralela y mixta, se debe eliminar completamente la resistencia del reóstato en el circuito de excitación. flujo de excitación F en este caso se obtiene valor más alto y el motor desarrolla el par requerido a una corriente de armadura más baja.
No es recomendable utilizar reóstatos de arranque para arrancar motores de mayor potencia, ya que esto provocaría importantes pérdidas de energía. Además, los reóstatos de arranque serían voluminosos. Por lo tanto, en motores de alta potencia, se utiliza un arranque del motor sin reóstato al reducir el voltaje. Ejemplos de esto son arrancar los motores de tracción de una locomotora eléctrica cambiándolos de conexión en serie al comenzar en paralelo con operación normal(ver § 29.6) o arrancar el motor en un circuito generador-motor (ver § 29.4).
Motor de excitación paralelo
El esquema para conectar un motor de excitación paralelo a la red se muestra en la fig. 29.3, una. Un rasgo característico de este motor es que la corriente en el devanado de campo (OB) no depende de la corriente de carga (corriente de armadura). El reóstato en el circuito de excitación sirve para regular la corriente en el devanado de excitación y el flujo magnético de los polos principales.
Las propiedades de rendimiento de un motor están determinadas por su características de funcionamiento, que se entiende como la dependencia de la velocidad de rotación norte, Actual yo, momento útil M2, par METRO de la potencia en el eje del motor R 2 en y (Fig. 29.3, 6 ).
Para analizar la dependencia y , que suele llamarse característica de velocidad, recurrimos a la fórmula (29.5), de la que se puede ver que con tensión constante tu dos factores afectan la velocidad: la caída de voltaje en el circuito de armadura y el flujo de excitación F. Con un aumento en la carga, el numerador disminuye, mientras que debido a la reacción del inducido, el denominador también disminuye. F. Típicamente, la reducción en el flujo causada por la reacción del inducido es pequeña y el primer factor afecta la velocidad más que el segundo. Como resultado, la velocidad del motor con carga creciente R 2 disminuye y el gráfico adopta una forma descendente con una ligera protuberancia frente al eje x. Si la reacción de la armadura en el motor va acompañada de un debilitamiento más significativo del flujo F, entonces la velocidad de rotación aumentará con el aumento de la carga, como lo muestra la curva punteada en la Fig. 29.3, b. Sin embargo, tal dependencia no es deseable, ya que, por regla general, no cumple la condición para el funcionamiento estable del motor: con un aumento de la carga en el motor, aumenta la velocidad de rotación, lo que conduce a un aumento adicional en la carga, etc., es decir, la velocidad de rotación norte el motor aumenta indefinidamente y el motor se “sobrecalienta”. Para dar a la característica de velocidad una forma de curva descendente, algunos motores en derivación utilizan un devanado de excitación en serie ligero (con un pequeño número de vueltas), que se denomina devanado estabilizador. Cuando este devanado se enciende en coordinación con el devanado de excitación en paralelo, su MMF compensa el efecto desmagnetizador de la reacción del inducido para que el flujo F permanece prácticamente sin cambios en todo el rango de carga ..., ya que
Si ignoramos la reacción del ancla, entonces (ya que ) podemos aceptar . Entonces, la característica mecánica del motor de excitación paralela es una línea recta, algo inclinada hacia el eje de abscisas (Fig. 29.4, a). El ángulo de inclinación de la característica mecánica es mayor cuanto mayor es el valor de la resistencia incluida en el circuito del inducido. La característica mecánica del motor en ausencia de resistencia adicional en el circuito del inducido se denomina natural(directo 1 ). Las características mecánicas del motor, obtenidas introduciendo una resistencia adicional en el circuito del inducido, se denominan artificial(directo 2 y 3 ).
El tipo de característica mecánica también depende del valor del flujo magnético principal F. Entonces, al disminuir F la velocidad de rotación x.x aumenta. y simultáneamente aumenta, es decir, ambos términos de la ecuación (29.11) aumentan. Esto conduce a un fuerte aumento en la pendiente de la característica mecánica, es decir, a una disminución en su rigidez (Fig. 29.4, b).
Cuando cambia el voltaje del inducido tu la velocidad de rotación cambia, pero permanece sin cambios. Como resultado, la rigidez de la característica mecánica (si ignoramos la influencia de la reacción del inducido) no cambia (Fig. 29.4, en), es decir, las características cambian de altura mientras permanecen paralelas entre sí.
§ 138. MOTOR ELÉCTRICO DE EXCITACIÓN PARALELA
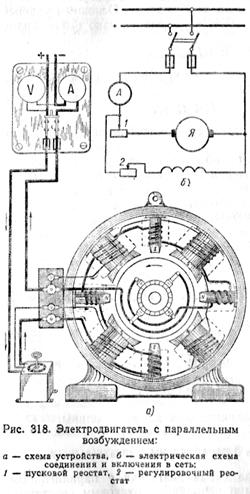
En la fig. 318 muestra un diagrama de un motor con excitación paralela y un reóstato de arranque incluido en el circuito de armadura. Dado que el devanado de excitación está conectado en paralelo a la red, entonces cuando resistencia constante el circuito de excitación y la tensión de red, el flujo magnético F del motor debe ser constante.
De la fórmula
se puede ver que el valor de contador-e. ds motor disminuye con el aumento de la corriente del inducido, lo que hace que la velocidad del motor también disminuya.
Sin embargo, como se mencionó anteriormente, la magnitud de la caída de voltaje en el devanado del inducido I a r a es muy pequeña en comparación con el voltaje U. Por lo tanto, con un aumento en la corriente de carga, la velocidad del motor disminuye ligeramente.
Por lo tanto, una propiedad característica de un motor con excitación paralela es una velocidad de rotación casi constante cuando cambia la carga en su eje. Por lo general, las velocidades de los motores de este tipo disminuyen solo entre un 3 y un 5% cuando se alcanza la carga máxima.
El par del motor es proporcional al producto de la corriente de armadura y el flujo magnético:
De esto se puede ver que el par del motor con excitación paralela es proporcional a la corriente de armadura:
Por lo tanto, por el amperímetro incluido en el circuito del inducido, se puede juzgar la carga del motor.
El motor tendrá la velocidad de rotación más alta en ralentí, si la resistencia del reóstato de ajuste se elimina por completo. Abrir el circuito de excitación hará que el flujo magnético del motor disminuya a una cantidad insignificante de flujo de magnetismo residual. Desde contra-e. ds debe ser casi igual al voltaje de la red, luego, con una disminución en el flujo magnético, la velocidad de rotación del motor aumentará considerablemente y se volverá peligrosa para la resistencia mecánica del motor. Por lo tanto, al operar el motor, es necesario monitorear el buen estado del circuito de excitación.
El control de velocidad de un motor en derivación generalmente se realiza variando el flujo con un reóstato variable en el circuito de campo. Este método de control de velocidad es el más económico. Algunos motores tienen un control de velocidad que va de 1,5:1 a 4:1. Los números muestran la relación entre la velocidad máxima y la mínima. Los límites de regulación están limitados principalmente por el deterioro de las condiciones de conmutación y la resistencia mecánica de la armadura.
El cambio de dirección de rotación de los motores con excitación paralela se puede realizar cambiando la dirección de la corriente en el devanado de excitación de los polos o cambiando la dirección de la corriente en el devanado del inducido. Por lo general, el cambio de rotación se realiza de la segunda manera, ya que cualquier operación con el devanado de excitación es peligrosa para el personal operativo e indeseable debido a la aparición de p. ds autoinducción, que puede provocar la ruptura del aislamiento del devanado y la quema de los contactos.
Los motores con excitación paralela se utilizan en redes de CC para impulsar algunas máquinas, mecanismos (carreteras eléctricas aéreas, bombas, ventiladores, telares, trenes de laminación, montacargas de minas) que requieren una velocidad de rotación constante o un amplio ajuste de velocidad.
23 .Anchor reacción, su Influencia negativa sobre el funcionamiento de un motor de CC, formas de compensar la reacción del inducido.
Reacción de armadura: el efecto del campo magnético creado por la corriente de armadura en el campo magnético de los polos principales de la máquina. En modo inactivo, la corriente de armadura = 0 y el campo magnético de la máquina está formado solo por los polos principales (Fig (a)). Es simétrica respecto al eje de los polos principales y respecto al neutro geométrico. Si apaga el devanado de excitación y conecta la armadura a fuente de alimentación, entonces la corriente que fluye en el devanado del inducido creará un campo magnético como se muestra en la Figura (b). el eje de los polos de este campo coincide con el eje de las escobillas y es perpendicular al eje del campo de los polos principales. La rotación de la armadura no afecta el patrón del campo de la armadura, porque la distribución de corriente en el devanado del inducido permanece constante. En el modo de operación de la máquina, ambos devanados están encendidos y el campo magnético se forma sumando ambos campos. Como resultado, el eje del campo magnético gira algunos ángulos, el neutro físico gira el mismo ángulo. En el modo de motor, el punto muerto se desplaza contra la rotación. Como consecuencia del desplazamiento, parte de los conductores de la rama paralela situada entre la escobilla y el neutro quedarán bajo el polo de polaridad opuesta y crearán un par de frenado. Un cambio en la carga de la máquina provocará un cambio en la corriente de armadura y un aumento o disminución correspondiente en su campo magnético. Por lo tanto, el ángulo cambiará con la carga.Además del desplazamiento neutral, la reacción del inducido reduce el flujo magnético general debido al hecho de que el campo debajo de los polos principales está distorsionado. Debajo de un borde del polo, se debilita y debajo del otro aumenta, pero la intensidad del campo debido a la saturación del borde del polo es menor que el debilitamiento y el flujo magnético resultante disminuye, lo que afecta negativamente el rendimiento energético del máquina.El desplazamiento del neutro físico también tiene un impacto negativo en el proceso de conmutación.El más efectivo. medios para reducir la influencia de la reacción del ancla es devanado de compensación. Se encaja en las ranuras especiales de los polos principales y se conecta en serie al circuito del inducido. El campo magnético del devanado de compensación es opuesto y compensa el campo magnético de la armadura. Corriente de devanado de compensación = corriente de armadura, por lo que la compensación se produce en todos los modos, desde inactivo hasta plena carga. Como resultado, el campo de la máquina debajo de los polos principales permanece prácticamente sin cambios. De otra manera - aumentar autorización entre los bordes de los postes principales y el ancla. Para mantener el flujo con un aumento en el espacio, se requiere un aumento en el MMF del devanado de excitación.
Máquinas eléctricas de corriente continua.
Generador con excitación en paralelo.
Fórmulas de cálculo:
La corriente entregada por el generador a la red:
Eds. generador: E \u003d U + Iya ∙Rya.
Potencia entregada a la red: P2 \u003d U ∙ I \u003d I 2 ∙ R
Potencia del motor de accionamiento: P1 = P2/ η
Pérdida de potencia en el devanado del inducido:
Rya \u003d Yo 2 yo ∙ Rya
Pérdida de potencia en el devanado de campo:
Рв = U ∙Iâ = I 2 â∙ Râ
Pérdidas totales: ΣP = P1 - ...
R2.
Eficiencia del generador:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
Motor con excitación paralela.
Fórmulas de cálculo:
Corriente del motor: I \u003d Ia + Iv
Voltaje del motor: U \u003d E + Ii ∙Rya.
Potencia consumida de la red: Р1 = U∙I
Potencia en el eje: P 2 = P 1 ∙η
Momento en el eje del motor:
M \u003d 9550 ∙ P 2 / n 2.
Eficiencia del motor:
η \u003d P 2 / P 1 \u003d (U∙I-ΣP) / U∙I
Ejemplo 6.1. Un generador de CC con excitación en paralelo desarrolla una tensión nominal Un = 220 V. El generador se carga con una carga Rn = 2,2 ohmios. Resistencia del devanado del inducido Rya = 0,2 ohmios, devanado de excitación Rv = 220 ohmios. Eficiencia del generador η = 0,87. Determine las siguientes cantidades:
1. corriente de carga; 2. corriente de armadura; 3. corriente de excitación; 4. fem del generador;
poder 5.net; 6. consumo de energía; 7. pérdidas totales en el generador; 8. pérdidas en el devanado del inducido; 9. pérdidas en el devanado de excitación.
1. Carga actual:
2. Corriente de excitación:
![]()
3. Corriente de armadura: Iа \u003d I - Iv \u003d 100 - 1 \u003d 99 A.
4. Generador de fem:
E \u003d U + Ii ∙ Rya \u003d 220 + 99 0.1 \u003d 229.9 V.
5. Potencia neta:
Р2 = Un ∙ I = 220 ∙ 100 = 22000 W = 22 kW.
6. Consumo de energía:
7. Pérdidas totales en el generador:
ΣP \u003d P1 - P2 \u003d 25,87 - 22 \u003d 3,87 kW.
8. Pérdidas en el devanado del inducido:
Rya \u003d Iya 2 ∙Rya \u003d 99 2 ∙0.2 \u003d 1960.2 W.
9. Pérdidas en el devanado de excitación:
Pv = Un ∙ Iv = 220 ∙ 1 = 220 W.
Respuesta: I = 100A; IV \u003d 1 A; Ia = 99 A; E = 229,9 V; P2 = 22 kilovatios;
P1 = 25,87 kilovatios; ΣР = 3,87 kW; Rya = 1960,2 W; Pv \u003d 220 W.
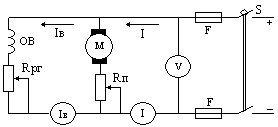
Ejemplo 6.2. Fig. 8.2 Un motor de CC de excitación paralela opera desde la red Un = 220 V. Velocidad de armadura n2 = 1450 rpm. Corriente del motor I \u003d 500 A, armadura contra fem E \u003d 202 V, resistencia del devanado de excitación Rv \u003d 44 ohmios. Eficiencia del motor
η = 0,88. Determinar: 1. corriente de excitación; 2. corriente de armadura; 3. resistencia del devanado del inducido; 4. consumo de energía; 5. potencia útil del eje; 6 Pérdidas totales en el motor; 7. pérdidas en el devanado del inducido; 8. pérdidas en el devanado del inducido; 9.torque en el eje.
1. Corriente de excitación:
![]()
2. Corriente de armadura:
Ia \u003d I - Iv \u003d 500 -5 \u003d 495 A.
3. Resistencia del devanado del inducido:
4. Consumo de energía de la red:
P1 \u003d Un ∙ I \u003d 220 ∙ 500 \u003d 110,000 W \u003d 110 kW.
5. Potencia neta del eje:
Р2 = P1 ∙ η = 110 ∙ 0,87 = 95,7 kW.
6. Pérdidas totales en el motor:
ΣP \u003d P1 - P2 \u003d 110 - 95,7 \u003d 14,3 kW.





