Por la cantidad de torque Motor de inducción el cambio de fase entre la corriente I 2 y e tiene una gran influencia. ds Rotor E 2S.
Considere el caso en que la inductancia del devanado del rotor es pequeña y, por lo tanto, se puede despreciar el cambio de fase (Fig. 223, a).
El campo magnético giratorio del estator se reemplaza aquí por el campo de los polos N y S, girando, digamos, en el sentido de las agujas del reloj. Usando la regla de la mano derecha, determinamos la dirección e. ds y corrientes en el devanado del rotor. Las corrientes del rotor, al interactuar con un campo magnético giratorio, crean un par. Las direcciones de las fuerzas que actúan sobre los conductores que llevan corriente están determinadas por la regla de la mano izquierda. Como se puede ver en el dibujo, el rotor bajo la acción de las fuerzas girará en la misma dirección que el propio campo giratorio, es decir, en el sentido de las agujas del reloj.
Considere el segundo caso, cuando la inductancia del devanado del rotor es grande. En este caso, el cambio de fase entre la corriente del rotor I 2 y e. ds el rotor E 2S también será grande. En la Fig. 223, b, el campo magnético del estator de un motor de inducción todavía se muestra en forma de polos N y S que giran en el sentido de las agujas del reloj. La dirección de e. ds queda igual que en la Fig. 223, a, pero debido al retraso de la corriente en fase, el eje campo magnético el rotor ya no coincidirá con la línea neutra del campo del estator, sino que se desplazará un cierto ángulo en contra de la rotación del campo magnético. Esto conducirá al hecho de que junto con la formación de un par dirigido en una dirección, algunos conductores crearán un par opuesto.
De esto puede verse que el par total del motor durante un cambio de fase entre la corriente y e. ds el rotor es más pequeño que para el caso en que I 2 y E 2S están en fase. Se puede probar que el par de un motor de inducción está determinado solo por el componente activo de la corriente del rotor, es decir, la corriente I 2 cos y que se puede calcular mediante la fórmula:
Ф m - flujo magnético del estator (y también aproximadamente igual al flujo magnético resultante de un motor de inducción);
Ángulo de fase entre e. ds y corriente de fase de devanado
C es un coeficiente constante.
Después de la sustitución:
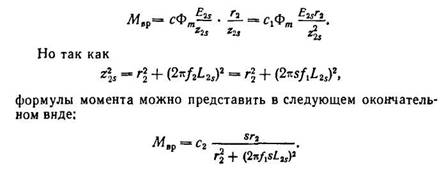
De la última expresión se puede ver que el par del motor de inducción depende del deslizamiento.
En la Fig. 224 muestra la curva A del par motor frente al deslizamiento. Se puede ver en la curva que en el momento del arranque, cuando s = l y n = 0, el par motor es pequeño. Esto se explica por el hecho de que en el momento del arranque, la frecuencia de la corriente en el devanado del rotor es la más alta y la resistencia inductiva del devanado es grande. Como resultado, cos tiene un valor pequeño (porque
|
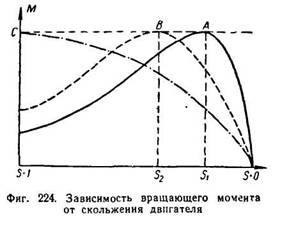
fila 0.1-0.2). Por lo tanto, aunque la corriente de arranque sea grande, el par de arranque será pequeño.
Con algún deslizamiento S 1, el par motor tendrá un valor máximo. Con una disminución adicional del deslizamiento o, en otras palabras, con un aumento adicional de la velocidad de rotación del motor, su par disminuirá rápidamente.
Al escalonar y al deslizar s = 0, el par del motor también será igual a cero.
Cabe señalar que en un motor asíncrono prácticamente no puede existir un deslizamiento igual a cero. Esto solo es posible si el rotor se alimenta externamente con un par en la dirección de rotación del campo del estator.
Par de arranque se puede aumentar si, en el momento del arranque, el cambio de fase entre la corriente y e. ds rotor. De la fórmula
se puede ver que si a una constante reactancia inductiva bobinados del rotor para aumentar la resistencia activa, luego el ángulo en sí disminuirá, lo que conducirá al hecho de que el par motor también aumentará. Esto se utiliza en la práctica para aumentar el par de arranque del motor. En el momento del arranque, se introduce una resistencia activa (reóstato de arranque) en el circuito del rotor, que luego se elimina tan pronto como el motor aumenta la velocidad.
El aumento del par de arranque hace que se obtenga el par máximo del motor con más deslizamiento (punto S 2 de la curva B de la figura 224). Al aumentar la resistencia activa del circuito del rotor en el arranque, es posible lograr que el par máximo sea en el momento del arranque (s = 1 curva C).
El par de un motor de inducción es proporcional al cuadrado del voltaje, por lo que incluso una pequeña disminución del voltaje va acompañada de una fuerte disminución del par.
La potencia P 1 suministrada al devanado del estator de un motor de inducción es igual a:
![]()
donde m 1 es el número de fases.
El estator del motor tiene las siguientes pérdidas de energía:
1) en el devanado del estator Res. =m 1 yo 1 2 r 1 ;
2) en el acero del estator y la histéresis y las corrientes de Foucault P C .
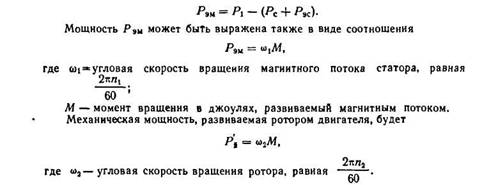
La potencia suministrada al rotor es la potencia del campo magnético giratorio, también llamada potencia electromagnética P eM.
La potencia electromagnética es igual a la diferencia entre la potencia suministrada al motor y las pérdidas en el estator del motor, es decir
|
La diferencia entre Р eM y representa las pérdidas eléctricas en el devanado del rotor Р eP, si despreciamos las pérdidas en el acero del rotor debido a su insignificancia (la frecuencia de remagnetización del rotor suele ser muy pequeña):
Por tanto, las pérdidas en el devanado del rotor son proporcionales al deslizamiento del rotor.
si de potencia mecánica desarrollado por el rotor, reste las pérdidas mecánicas R mx debidas a la fricción en los cojinetes del rotor, la fricción en el aire, etc., así como las pérdidas adicionales R D que surgen bajo carga y debido a los campos de dispersión del rotor, y las pérdidas causadas por: pulsaciones del campo magnético en los dientes del estator y el rotor, entonces habrá potencia útil en el eje del motor, que denotaremos por P 2 .
La eficiencia de un motor de inducción se puede determinar mediante la fórmula:

De la última expresión se puede ver que el momento de rotación de un motor de inducción es proporcional al producto de la magnitud del flujo magnético giratorio, la corriente del rotor y el coseno del ángulo entre e. ds rotor y su corriente,

Del circuito equivalente de un motor asíncrono se obtiene el valor de la corriente reducida del rotor, que damos sin demostración.
El momento desarrollado por el motor es igual a la potencia electromagnética dividida por la velocidad de rotación síncrona del accionamiento eléctrico.
M \u003d P em / ω 0
La potencia electromagnética es la potencia que se transmite a través del entrehierro desde el estator al rotor, y es igual a las pérdidas en el rotor, que vienen determinadas por la fórmula:
P em \u003d m I 2 2 (r 2 '/s)
m es el número de fases.
M \u003d M em \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s)
La característica electromecánica de un motor de inducción es la dependencia de I2' del deslizamiento. Pero desde máquina asíncrona funciona solo como motor eléctrico, la característica principal es la característica mecánica.
M \u003d Me m \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s) - una expresión simplificada de la característica mecánica.
Sustituyendo el valor actual en esta expresión, obtenemos: M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
En lugar de ω 0, debe sustituir la velocidad mecánica, por lo que se reduce el número de pares de polos.
M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] es la ecuación para la característica mecánica de un motor de inducción.
Cuando el motor de inducción entra en modo generador, la velocidad de rotación ω > ω 0 y el deslizamiento se vuelve negativo (s Cuando el deslizamiento cambia de 0 a +∞, el modo se denomina "modo de freno electromagnético".
Dados valores de deslizamiento de o a +∞, obtenemos la característica:
Características mecánicas completas de un motor asíncrono.
Como puede verse en la característica mecánica, tiene dos extremos: uno en el segmento de cambio de deslizamiento en el área de 0 a +∞, el otro en el segmento de 0 a -∞. dM/ds=0
M max = / ] + se refiere al modo motor. - se refiere al modo generador.
M max \u003d M cr M cr - momento crítico.
El deslizamiento en el que el momento alcanza su máximo se denomina deslizamiento crítico y se determina mediante la fórmula: s cr = ±
El deslizamiento crítico tiene el mismo valor en los modos de motor y generador.
El valor de Mcr se puede obtener sustituyendo el valor del deslizamiento crítico en la fórmula del momento.
El momento en que el deslizamiento es igual a 1 se denomina par de arranque. La expresión del par de arranque se puede obtener sustituyendo 1 en la fórmula:
METRO p \u003d / [ω 0 [(r 1 + r 2 ') 2 + (x 1 + x 2 ') 2 ]]
Dado que el denominador en la fórmula para el momento máximo es varios órdenes de magnitud mayor que U f, se acostumbra suponer que M kr ≡ U f 2 .
El deslizamiento crítico depende del valor de la resistencia activa del devanado del rotor R 2 '. El par de arranque, como se puede ver en la fórmula, depende de la resistencia activa del rotor r 2 '. esta propiedad del par de arranque se aprovecha en motores asíncronos con rotor de fase, en los que se aumenta el par de arranque introduciendo una resistencia activa en el circuito del rotor.
7. Transformador de ralentí
El modo inactivo del transformador se denomina modo de operación cuando uno de los devanados del transformador se alimenta desde una fuente con voltaje alterno y con circuitos abiertos de otros devanados. Este modo de operación puede ser en un transformador real cuando está conectado a la red, y la carga alimentada desde su devanado secundario aún no está encendida. Por devanado primario transformador pasa corriente I 0 , al mismo tiempo durante devanado secundario no hay corriente, porque el circuito está abierto. La corriente I 0 , al pasar por el devanado primario, crea una bandeja Ф 0 que cambia sinusoidalmente en el circuito magnético que, debido a las pérdidas magnéticas, se retrasa con respecto a la corriente en fase en un ángulo de pérdida δ. 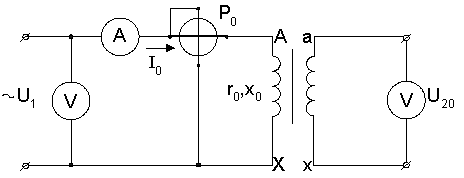
La magnitud del par de un motor de inducción está muy influenciada por el cambio de fase entre la corriente I 2 y e. ds Rotor E 2S.
Considere el caso en que la inductancia del devanado del rotor es pequeña y, por lo tanto, se puede despreciar el cambio de fase (Fig. 223, a).
El campo magnético giratorio del estator se reemplaza aquí por el campo de los polos N y S, girando, digamos, en el sentido de las agujas del reloj. Usando la regla de la mano derecha, determinamos la dirección e. ds y corrientes en el devanado del rotor. Las corrientes del rotor, al interactuar con un campo magnético giratorio, crean un par. Las direcciones de las fuerzas que actúan sobre los conductores que llevan corriente están determinadas por la regla de la mano izquierda. Como se puede ver en el dibujo, el rotor bajo la acción de las fuerzas girará en la misma dirección que el propio campo giratorio, es decir, en el sentido de las agujas del reloj.
Considere el segundo caso, cuando la inductancia del devanado del rotor es grande. En este caso, el cambio de fase entre la corriente del rotor I 2 y e. ds el rotor E 2S también será grande. En la Fig. 223, b, el campo magnético del estator de un motor de inducción todavía se muestra en forma de polos N y S que giran en el sentido de las agujas del reloj. La dirección de e. ds queda igual que en la Fig. 223, a, pero debido al retraso de fase de la corriente, el eje del campo magnético del rotor ya no coincidirá con la línea neutra del campo del estator, sino que se desplazará en cierto ángulo contra la rotación del campo magnético. Esto conducirá al hecho de que junto con la formación de un par dirigido en una dirección, algunos conductores crearán un par opuesto.
De esto puede verse que el par total del motor durante un cambio de fase entre la corriente y e. ds el rotor es más pequeño que para el caso en que I 2 y E 2S están en fase. Se puede probar que el par de un motor de inducción está determinado solo por el componente activo de la corriente del rotor, es decir, la corriente I 2 cos y que se puede calcular mediante la fórmula:
Ф m - flujo magnético del estator (y también aproximadamente igual al flujo magnético resultante de un motor de inducción);
Ángulo de fase entre e. ds y corriente de fase de devanado
C es un coeficiente constante.
Después de la sustitución:
De la última expresión se puede ver que el par del motor de inducción depende del deslizamiento.
En la Fig. 224 muestra la curva A del par motor frente al deslizamiento. Se puede ver en la curva que en el momento del arranque, cuando s = l y n = 0, el par motor es pequeño. Esto se explica por el hecho de que en el momento del arranque, la frecuencia de la corriente en el devanado del rotor es la más alta y la resistencia inductiva del devanado es grande. Como resultado, cos tiene un valor pequeño (porque
|
fila 0.1-0.2). Por lo tanto, aunque la corriente de arranque sea grande, el par de arranque será pequeño.
Con algún deslizamiento S 1, el par motor tendrá un valor máximo. Con una disminución adicional del deslizamiento o, en otras palabras, con un aumento adicional de la velocidad de rotación del motor, su par disminuirá rápidamente.
Al escalonar y al deslizar s = 0, el par del motor también será igual a cero.
Cabe señalar que en un motor asíncrono prácticamente no puede existir un deslizamiento igual a cero. Esto solo es posible si el rotor se alimenta externamente con un par en la dirección de rotación del campo del estator.
El par de arranque se puede aumentar si, en el momento del arranque, se reduce el desfase entre la corriente y e. ds rotor. De la fórmula
se puede ver que si, con una resistencia inductiva constante del devanado del rotor, la resistencia activa aumenta, entonces el ángulo en sí disminuirá, lo que conducirá al hecho de que el par motor también aumentará. Esto se utiliza en la práctica para aumentar el par de arranque del motor. En el momento del arranque, se introduce una resistencia activa (reóstato de arranque) en el circuito del rotor, que luego se elimina tan pronto como el motor aumenta la velocidad.
El aumento del par de arranque hace que se obtenga el par máximo del motor con más deslizamiento (punto S 2 de la curva B de la figura 224). Al aumentar la resistencia activa del circuito del rotor en el arranque, es posible lograr que el par máximo sea en el momento del arranque (s = 1 curva C).
El par de un motor de inducción es proporcional al cuadrado del voltaje, por lo que incluso una pequeña disminución del voltaje va acompañada de una fuerte disminución del par.
La potencia P 1 suministrada al devanado del estator de un motor de inducción es igual a:
![]()
donde m 1 es el número de fases.
El estator del motor tiene las siguientes pérdidas de energía:
1) en el devanado del estator Res. =m 1 yo 1 2 r 1 ;
2) en el acero del estator y la histéresis y las corrientes de Foucault P C .
La potencia suministrada al rotor es la potencia del campo magnético giratorio, también llamada potencia electromagnética P eM.
La potencia electromagnética es igual a la diferencia entre la potencia suministrada al motor y las pérdidas en el estator del motor, es decir
|
La diferencia entre Р eM y representa las pérdidas eléctricas en el devanado del rotor Р eP, si despreciamos las pérdidas en el acero del rotor debido a su insignificancia (la frecuencia de remagnetización del rotor suele ser muy pequeña):
Por tanto, las pérdidas en el devanado del rotor son proporcionales al deslizamiento del rotor.
Si de la potencia mecánica desarrollada por el rotor, restamos las pérdidas mecánicas R mx debido a la fricción en los cojinetes del rotor, la fricción del aire, etc. campo en los dientes del estator y el rotor, entonces habrá potencia útil en el eje del motor, que denotamos por P 2.
La eficiencia de un motor de inducción se puede determinar mediante la fórmula:
De la última expresión se puede ver que el momento de rotación de un motor de inducción es proporcional al producto de la magnitud del flujo magnético giratorio, la corriente del rotor y el coseno del ángulo entre e. ds rotor y su corriente,
Del circuito equivalente de un motor asíncrono se obtiene el valor de la corriente reducida del rotor, que damos sin demostración.
Le recomendamos que lea
, diagnóstico, tratamiento Tratamiento de la clamidia urogenital") Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital
Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué
Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército?
Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército? Manzanas al horno con requesón Manzanas al horno con requesón
Manzanas al horno con requesón Manzanas al horno con requesón

