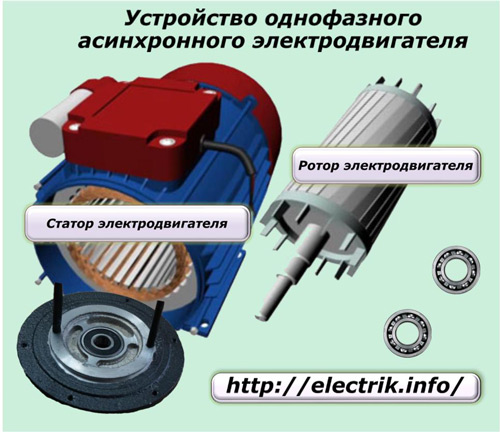
La impresionante potencia de un motor eléctrico asíncrono, que transforma la electricidad en energía rotacional, no se crea debido a ningún componente mecánico: para una rotación tan poderosa, solo se utilizan electroimanes en su "relleno".
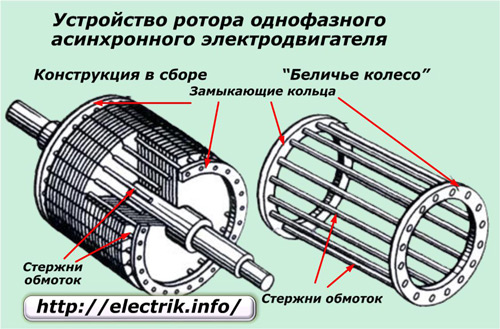
Rotor de motor de inducción: diseño
Rotor: un elemento de un motor eléctrico que gira dentro del estator (componente fijo), cuyo eje está conectado a las partes de las unidades de trabajo, por ejemplo, sierras, turbinas y bombas. El núcleo laminado está formado por placas individuales de acero eléctrico con ranuras semicerradas o abiertas.
El motor es un dispositivo electromecánico que convierte la energía eléctrica en energía mecánica. y un motor trifásico que funciona a velocidad síncrona se llama motor síncrono. Cuando dos polos opuestos se acercan, si los imanes son fuertes, existe una gran fuerza de atracción entre los dos polos. En este estado, dos imanes se llaman magnéticos.
Principio de rotación síncrona
¿Cómo gira el rotor a velocidad síncrona? Ahora, para comprender el concepto de operación de motor síncrono, considere un rotor simple de dos polos. El motor síncrono es una máquina de doble excitación con dos entradas eléctricas conectadas. Por tanto, un motor síncrono gira a una y sólo una velocidad, es decir, la velocidad síncrona. Pero todo esto depende de la presencia de bloqueo magnético entre los polos del estator y el rotor. Es prácticamente imposible que los polos del estator tiren de los polos del rotor desde su posición estacionaria a un estado de enganche magnético. esta es la razón por la que los motores síncronos no arrancan solos.
El rotor masivo es un cilindro de acero sólido colocado dentro del estator, con un núcleo presionado sobre su superficie.
Sin contacto, no conectado a ningún dispositivo externo circuito eléctrico el devanado del rotor crea par y es de dos tipos:
- cortocircuitado (rotor cortocircuitado);
- fase (rotor de fase).
rotor de jaula de ardilla
Varillas de cobre altamente conductoras (para máquinas de alta potencia) o varillas de aluminio (para máquinas de menor potencia) soldadas o vertidas en la superficie del núcleo y cortocircuitadas desde los extremos con dos anillos que juegan el papel de electroimanes con polos orientados hacia el estator. . Este diseño se llama "jaula de ardilla", que le dio el ingeniero eléctrico ruso M. O. Dolivo-Dobrovolsky.
Métodos para arrancar un motor síncrono. Después de un tiempo, cuando ocurre el bloqueo magnético, el embrague corta el suministro al motor externo. Aplicación de motores síncronos. Se utiliza donde se requiere alta potencia a velocidad constante.
Debido a que un motor síncrono es capaz de factores de potencia en adelanto y atraso, puede usarse para mejorar el factor de potencia. Un motor síncrono descargado con un factor de potencia adelantado está conectado en un sistema de potencia donde no se pueden usar capacitores estáticos.
Las varillas del devanado no tienen ningún aislamiento, ya que el voltaje en dicho devanado es cero. Más comúnmente utilizado para varillas de motores de potencia media, el aluminio de fácil fusión se caracteriza por una baja densidad y una alta conductividad eléctrica. Para reducir los armónicos más altos de la fuerza electromotriz (EMF) y eliminar la ondulación campo magnético, las varillas del rotor tienen un cierto ángulo de inclinación calculado con respecto al eje de rotación.
Diseño de motor de inducción de rotor rotativo
El motor síncrono encuentra aplicación donde la velocidad de operación es más baja y se requiere alta potencia. En mi último artículo, discutimos qué tipo. Este motor es el que utiliza el rotor bobinado. El motor asíncrono de rotor rotativo también se conoce como motor asincrónico deslizar. Al igual que con otros motores de inducción, las partes principales son el estator y el rotor. El estator de este motor es el mismo que en los motores de inducción con rotor de jaula de ardilla. El rotor es la parte que lo hace diferente de otros motores de inducción.
En los motores de baja potencia, las ranuras del núcleo generalmente están cerradas: separando el rotor del espacio de aire, una placa de acero le permite fijar adicionalmente los devanados, pero a expensas de un aumento en su resistencia inductiva.
rotor de fase
Se caracteriza por no diferir prácticamente del devanado del estator trifásico (en más caso general- devanado multifásico) colocado en las ranuras del núcleo, cuyos extremos están conectados de acuerdo con el esquema de "estrella". Los cables de bobinado están conectados a anillos de contacto fijados en el eje del rotor, a los cuales, cuando se arranca el motor, se presionan y deslizan cepillos estacionarios de grafito o metal-grafito conectados al reóstato.
Estator del motor de inducción del rotador bobinado
Permíteme darte una breve introducción al estator y luego hablarte sobre la estructura del rotor.
Rotor de motor de inducción de rotor bobinado
En un motor de inducción de rotor rotativo, el rotor tiene devanado trifásico similar al devanado del estator. El devanado se coloca uniformemente en las ranuras del rotor. conectado con 3 anillos colectores. Se trata de la construcción del rotor. Ahora analicemos cómo funciona.Funcionamiento de un motor de inducción con rotor bobinado
El campo magnético del estator y el campo magnético del rotor interactúan y dan como resultado un par que hará girar el rotor.- El rotor también es cilíndrico y tiene orificios de enrollamiento.
- Estos anillos deslizantes están montados en el eje.
- Cada fase está conectada a uno de los tres anillos colectores.
- Estos anillos colectores están conectados a las escobillas.
- Los tres anillos deslizantes giran con el rotor mientras las manecillas permanecen estacionarias.
- Este campo magnético se denomina campo magnético del rotor.
Para limitar las corrientes de Foucault resultantes, suele ser suficiente una película de óxido aplicada a la superficie de los devanados, en lugar de barnices aislantes.
Una resistencia trifásica de arranque o ajuste añadida al circuito de devanado del rotor le permite cambiar la resistencia activa del circuito del rotor, lo que ayuda a reducir las altas corrientes de arranque. Se pueden utilizar reóstatos:
La velocidad y el par se pueden controlar en estos motores cambiando la resistencia. Algunas de las características de los motores de inducción de rotor rotativo se presentan a continuación. El motor de inducción de rotor bobinado requiere un mantenimiento adicional debido al deslizamiento y las escobillas. Este motor consume menos corriente al arrancar en comparación con los motores de inducción de jaula de ardilla. El motor de inducción de rotor rotativo es menos eficiente que los motores de inducción de jaula de ardilla.
- Puede controlar la velocidad de estos motores.
- El momento también se puede controlar.
- Estos motores tienen un alto par de arranque.
- Dichos motores son más caros que otros motores de inducción.
- También se tienen en cuenta los costes de mantenimiento.
- Estos motores tienen un bajo factor de potencia.
- alambre metálico o escalonado - con cambio manual o automático de un nivel de resistencia a otro;
- líquido, cuya resistencia está regulada por la profundidad de inmersión en el electrolito de los electrodos.
Para aumentar la durabilidad de las escobillas, algunos modelos de rotores de fase están equipados con un mecanismo especial de jaula de ardilla que levanta las escobillas después de arrancar el motor y cierra los anillos.
Y donde no se pueden utilizar motores de inducción jaula de ardilla debido a sus altas corrientes de arranque. El motor de inducción de rotor bobinado se utiliza en aplicaciones que requieren arranque suave y velocidad variable. Algunas de las aplicaciones de este motor incluyen grúas, molinos, montacargas y transportadores. El motor de inducción de rotor rotativo también se utiliza en ventiladores, sopladores y mezcladores. Se utilizan en bombas grandes en la industria del agua.
- Se utilizan en lugares donde se requiere un alto par de arranque.
- Estos motores se utilizan con altas cargas de inercia.
Los motores asíncronos con rotor de fase se caracterizan por un diseño más complejo que los de jaula de ardilla, pero al mismo tiempo, características de arranque y control más óptimas.
Principio de funcionamiento
Los electroimanes del estator están ubicados cerca de las barras del rotor y les transmiten electricidad para hacerlo girar. El campo magnético inducido en el rotor seguirá al campo magnético del estator, realizando así la rotación mecánica del eje del rotor y unidades asociadas. Al mismo tiempo, la inducción electromagnética creada por las bobinas del estator empuja la corriente en las varillas estrictamente lejos de sí misma. El valor de la corriente en las varillas cambia con el tiempo.
Se utilizan en una variedad de aplicaciones industriales, pero pueden protegerse de diversos peligros, como fallas eléctricas mecánicas, para ayudar a sus propósitos. Este artículo analiza el sistema para proteger motores asíncronos de fallas. Este motor está experimentando diferentes tipos fallas eléctricas como sobrevoltaje, bajo voltaje, sobrecarga, voltaje desequilibrado, falla a tierra de fase y monofásico. Estas fallas eléctricas hacen que los devanados del motor se calienten, lo que reduce la vida útil del motor.
Escriba comentarios, adiciones al artículo, tal vez me perdí algo. Echa un vistazo, me alegraré si encuentras algo más útil en mi sitio. Mis mejores deseos.
El propio nombre de este aparato eléctrico indica que Energía eléctrica, que llega a él, se convierte en movimiento rotatorio rotor. Además, el adjetivo "asincrónico" caracteriza la discrepancia, el retraso de las velocidades de rotación de la armadura del campo magnético del estator.
El grado de un motor de inducción depende de los costos y características del motor. El sistema direccional está diseñado para proteger el motor asíncrono del sobrecalentamiento y monofásico. El sistema de protección que utiliza múltiples motores para la producción es muy importante en las industrias.
El principal plan de diseño para este proyecto es garantizar la seguridad en las industrias. Si la temperatura del motor durante el proceso supera el valor umbral, el motor se detiene sin demora. El sistema utiliza una fuente de alimentación trifásica a la que se conectan transformadores trifásicos. Si alguna de las fases no está disponible, entonces termina el transformador equivalente, suministrando energía al circuito.
La palabra "monofásico" provoca una definición ambigua. Esto se debe a que en la eléctrica determina varios fenómenos:
cambio, diferencia de ángulo entre cantidades vectoriales;
conductor potencial de dos, tres o cuatro hilos circuito eléctrico corriente alterna;
uno de los devanados del estator o del rotor motor trifasico o un generador.
El relé principal se alimenta a través de un conjunto de 4 relés, que están desconectados debido a que uno de los relés no está controlado por la fuente de alimentación. Por lo tanto, el relé principal proporciona alimentación trifásica al motor, que se apaga. El termistor está conectado al cuerpo del motor de inducción para detectar la temperatura. Si la temperatura aumenta, el cuarto relé se desactiva.
Además, este diseño se puede desarrollar usando sensores de corriente para protección contra sobrecarga y un sensor de secuencia de fase para proteger el motor de una secuencia de fase incorrecta. Así, todo esto concierne al sistema de protección de los motores asíncronos. Esperamos que entiendas mejor este concepto.
Por lo tanto, aclaramos de inmediato que motor electrico monofasico se acostumbra llamar al que trabaja de red de dos hilos corriente alterna, representada por fase y potencial cero. El número de devanados montados en varios diseños de estator no afecta esta determinación.
Diseño de motores
Según su dispositivo técnico, un motor asíncrono consta de:
El uso de un devanado de cambio de fase en un estator.
Sus principales características son: Fiabilidad Bajo coste de adquisición y mantenimiento Posibilidad de control de velocidad. Bombas y compresores Ventiladores Fresadoras Cintas de correr, cintas transportadoras y elevadores Amoladoras y amoladoras Sierras, tornos y amoladoras.
El funcionamiento de todos los motores eléctricos, incluido el motor asíncrono trifásico, se basa en el campo magnético creado por la corriente eléctrica que circula en los devanados de la máquina. En cuanto al motor de inducción trifásico, tiene tres devanados en una estructura llamada estator.
1. estator - una parte estática y fija, hecha por un cuerpo con varios elementos eléctricos ubicados en él;
2. un rotor girado por las fuerzas del campo electromagnético del estator.
La conexión mecánica de estas dos partes se realiza mediante cojinetes de rotación, cuyos aros interiores se asientan en los casquillos ajustados del eje del rotor, y los aros exteriores se montan en tapas laterales de protección fijadas en el estator.
El campo magnético resultante generado por cada corriente eléctrica es de naturaleza rotatoria y de velocidad constante. ¿Cómo podemos encontrar el campo resultante? Cuando una bobina es impulsada por una corriente eléctrica, se crea un campo magnético a lo largo del eje de la bobina y tiene un valor proporcional a la corriente.
El devanado trifásico consta de tres espaciadores monofásicos de 120 ohmios. Estos campos están ubicados a una distancia de 120 grados entre sí. Este campo magnético atrae una estructura en movimiento llamada rotor, lo que hace que gire. La velocidad sincrónica del campo giratorio se da de la siguiente manera.
Rotor
Su dispositivo para estos modelos es el mismo que para todos los motores asíncronos: un circuito magnético está montado en un eje de acero hecho de placas laminadas a base de aleaciones de hierro dulce. En su superficie exterior, se hacen ranuras en las que se montan varillas de bobinado de aluminio o cobre, en cortocircuito en los extremos a los anillos de cierre.
Los valores de polo más comunes son 2, 4, 6 u 8 polos. La parte móvil, llamada rotor, responsable de la transmisión. movimiento mecanico a una carga como un ascensor. Obviamente, todos los dispositivos que me interesan están equipados con un motor asíncrono.
Principio y funcionamiento de un motor de inducción.
¿Cuáles son las ventajas de este tipo de motor? Aquí hay algunas respuestas. El motor de inducción es un motor de alto rendimiento que se utiliza a menudo en los campos del transporte, la industria y electrodomésticos. El motor de inducción, que consta de dos partes separadas llamadas rotor y estator, debe su nombre a la diferencia de potencia medida en cada una de estas partes. En efecto, aunque el estator gire a una cierta velocidad determinada por la corriente eléctrica, el rotor, por su parte, genera su propio campo magnético y tiene su propia velocidad de rotación, que no es proporcional a la velocidad del estator.
fluye en el devanado del rotor electricidad, inducida por el campo magnético del estator, y el circuito magnético sirve para buen paso el flujo magnético creado aquí.
Los diseños de rotores separados para motores monofásicos pueden estar hechos de materiales no magnéticos o ferromagnéticos en forma de cilindro.
Procesador de alimentos y motor asíncrono
Esta diferencia, llamada cambio de fase, suele estar entre el 2 y el 10 %. El motor de inducción es muy utilizado en el mundo de los electrodomésticos, principalmente para lavadoras, lavavajillas y secadoras. Este tipo de motor es muy robusto y ofrece un funcionamiento relativamente silencioso. En el caso de los robots domésticos, disponer de un motor de inducción tiene una importante ventaja: debido a que las dos partes del motor giran a diferente velocidad, las aspas del robot pueden adaptar su velocidad al contenido del propio recipiente cuando el aparato está funcionando a pleno rendimiento. energía.
estator
También se presenta el diseño del estator:
cuerpo;
circuito magnético;
devanado.
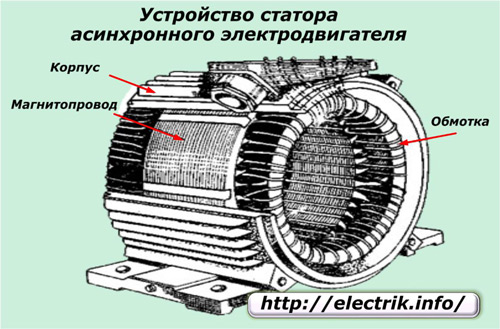
Su objetivo principal es generar un campo electromagnético estacionario o giratorio.
El devanado del estator generalmente consta de dos circuitos:
En otras palabras, cuanto más densa es la cocción, más lento gira el robot, incluso si está configurado para poder maximo. El motor asíncrono también ofrece la posibilidad de adaptar la velocidad del dispositivo a la cantidad de productos presentes en el contenedor. En resumen: los robots que tienen un motor asíncrono son robots inteligentes. Otra ventaja importante: el motor asíncrono de los robots domésticos hace que estos dispositivos sean más silenciosos. ¡Criterio de selección para cocinar el domingo por la mañana sin despertar a toda la casa!
1. trabajador;
2. lanzador.
Para los diseños más simples, diseñados para el desenrollado manual de la armadura, solo se puede hacer un devanado.
El principio de funcionamiento de un motor eléctrico monofásico asíncrono.
Para simplificar la presentación del material, imaginemos que el devanado del estator se realiza con una sola vuelta de espira. Sus cables dentro del estator se llevan en un círculo de 180 grados angulares. A través de él pasa una corriente sinusoidal alterna, que tiene semiondas positivas y negativas. No crea un campo magnético giratorio, sino pulsante.
Cómo se producen las pulsaciones del campo magnético
Analicemos este proceso usando el ejemplo del flujo de una media onda de corriente positiva en los tiempos t1, t2, t3.
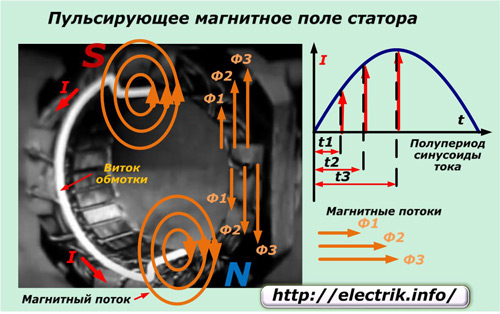
Corre a lo largo de la parte superior del conductor hacia nosotros y a lo largo de la parte inferior alejándose de nosotros. En el plano perpendicular representado por el circuito magnético, surgen flujos magnéticos F alrededor del conductor.
Las corrientes que cambian de amplitud en los momentos de tiempo considerados crean campos electromagnéticos de diferente magnitud F1, F2, F3. Dado que la corriente en la mitad superior e inferior es la misma, pero la bobina está doblada, los flujos magnéticos de cada parte se dirigen de manera opuesta y cancelan la acción de los demás. Puede determinar esto por la regla de la barrena o la mano derecha.
Como puede ver, con una media onda de rotación positiva, no se observa el campo magnético, sino que solo se produce su pulsación en las partes superior e inferior del cable, que también se equilibran mutuamente en el circuito magnético. El mismo proceso ocurre en la sección negativa de la sinusoide, cuando las corrientes cambian de dirección a la opuesta.
Como no hay un campo magnético giratorio, el rotor permanecerá estacionario porque no se le aplican fuerzas para comenzar a girar.
Cómo se crea la rotación del rotor en un campo pulsante
Si ahora le damos al rotor la rotación, aunque sea a mano, entonces continuará este movimiento.
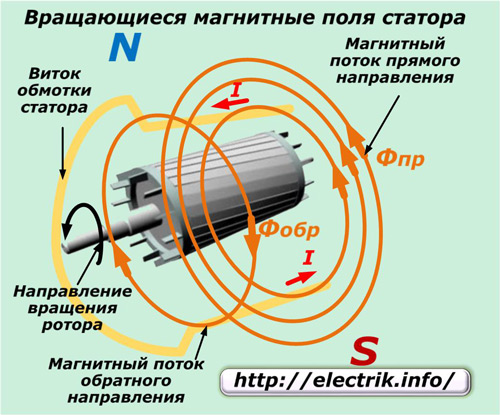
Para explicar este fenómeno, mostramos que el flujo magnético total cambia en la frecuencia de la sinusoide actual desde cero hasta un valor máximo en cada medio ciclo (con un cambio en la dirección opuesta) y consta de dos partes formadas en la parte superior y ramas inferiores, como se muestra en la figura.
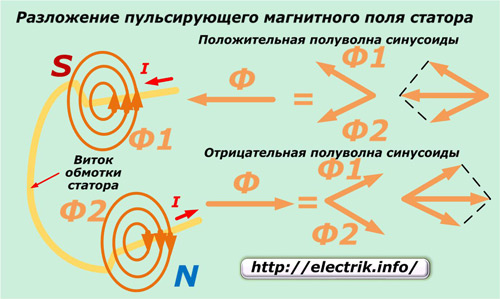
El campo magnético pulsante del estator consiste en dos circulares con amplitud Фmax/2 y que se mueven en direcciones opuestas con la misma frecuencia.
npr=nrev=f60/p=1.
Esta fórmula indica:
npr y nrev de la frecuencia de rotación del campo magnético del estator en las direcciones de avance y retroceso;
n1 es la velocidad del flujo magnético giratorio (rpm);
p es el número de pares de polos;
f es la frecuencia de la corriente en el devanado del estator.
Ahora le daremos al motor la rotación manual en una dirección, e inmediatamente tomará el movimiento debido a la ocurrencia de un momento de rotación causado por el deslizamiento del rotor en relación con diferentes flujos magnéticos de las direcciones hacia adelante y hacia atrás.
Supongamos que el flujo magnético de la dirección hacia adelante coincide con la rotación del rotor, y la inversa, respectivamente, será opuesta. Si denotamos por n2 la frecuencia de rotación de la armadura en rpm, entonces podemos escribir la expresión n2< n1.
En este caso, denotamos Spr \u003d (n1-n2) / n1 \u003d S.
Aquí, los índices S y Spr son los deslizamientos del motor de inducción y el rotor del flujo magnético relativo de la dirección de avance.
Para el flujo inverso, el Srev deslizante se expresa mediante una fórmula similar, pero con un cambio de signo n2.
Srev \u003d (n1 - (-n2)) / n1 \u003d 2-Spr.
De acuerdo con la ley de la inducción electromagnética, bajo la acción de flujos magnéticos directos e inversos en el devanado del rotor, fuerza electromotriz, que creará en él corrientes de las mismas direcciones I2pr e I2arr.

Su frecuencia (en hercios) será directamente proporcional a la cantidad de deslizamiento.
f2pr=f1∙Spr;
f2rev=f1∙Srev.
Además, la frecuencia f2rev, formada por la corriente inducida I2rev, supera significativamente la frecuencia f2rev.
Por ejemplo, el motor eléctrico está funcionando en una red de 50 Hz con n1=1500 y n2=1440 rpm. Su rotor tiene deslizamiento relativo al flujo magnético en dirección directa Spr=0.04 y frecuencia de corriente f2pr=2 Hz. Deslizamiento inverso Srev=1,96 y frecuencia de corriente f2rev=98 Hz.
Según la ley de Ampère, cuando la corriente I2pr interactúa con el campo magnético Фpr, aparecerá un par Mpr.
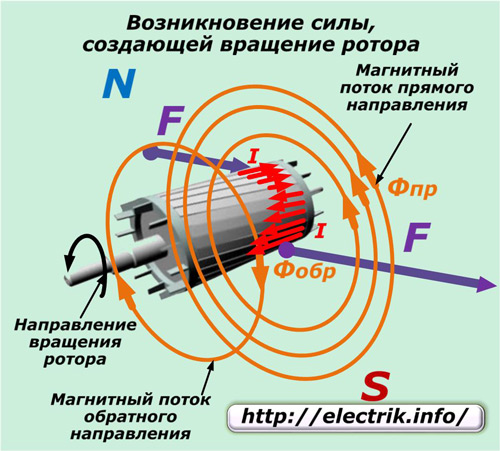
Mpr \u003d cm ∙ Fpr ∙ I2pr ∙cosφ2pr.
Aquí, el valor del coeficiente constante cM depende del diseño del motor.
En este caso, también actúa el flujo magnético inverso Mobr, que se calcula mediante la expresión:
Mobr \u003d cm ∙ Fabr ∙ I2 arr ∙ cosφ2 arr.
Como resultado de la interacción de estos dos flujos, aparecerá el resultante:
M= Mpr-Mobr.
¡Atención! Cuando el rotor gira, se inducen en él corrientes de diferentes frecuencias, que crean momentos de fuerzas con diferentes direcciones. Por lo tanto, la armadura del motor girará bajo la acción de un campo magnético pulsante en la dirección desde la que comenzó la rotación.
Durante la superación de la carga nominal por un motor monofásico, se crea un pequeño deslizamiento con la parte principal del par directo Mpr. La contrarrestación del campo magnético inverso de frenado Mobr afecta muy poco debido a la diferencia en las frecuencias de las corrientes de las direcciones directa e inversa.
f2reverse actual excede significativamente f2reverse, y el generado reactancia inductiva X2obr supera con creces el componente activo y proporciona un gran efecto desmagnetizador del flujo magnético inverso Fobre, que finalmente disminuye.
Dado que el factor de potencia del motor bajo carga es pequeño, el flujo magnético inverso no puede tener un efecto fuerte en el rotor giratorio.
Cuando una fase de la red se alimenta a un motor con un rotor fijo (n2=0), entonces tanto el deslizamiento directo como el inverso son iguales a uno, y los campos magnéticos y las fuerzas de los flujos directo e inverso están equilibrados y la rotación no. ocurrir. Por lo tanto, es imposible desenrollar la armadura del motor eléctrico del suministro de una fase.
Cómo determinar rápidamente la velocidad del motor:
¿Cómo se crea la rotación del rotor en un motor asíncrono monofásico?
A lo largo de toda la historia de funcionamiento de dichos dispositivos, se han desarrollado las siguientes soluciones de diseño:
1. giro manual del eje a mano o cuerda;
2. el uso de un devanado adicional conectado en el momento del lanzamiento debido a una resistencia óhmica, capacitiva o inductiva;
3. división por una bobina magnética cortocircuitada del circuito magnético del estator.
El primer método se usó en el desarrollo inicial y no se usó más debido a los posibles riesgos de lesiones durante el lanzamiento, aunque no requiere que se conecten cadenas adicionales.
El uso de un devanado de cambio de fase en el estator.
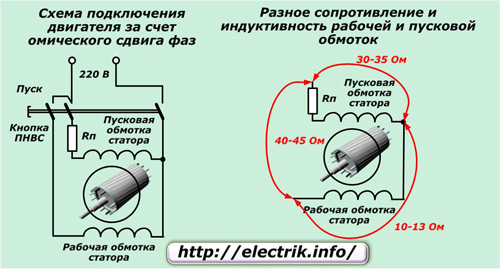
Para dar la rotación inicial del rotor al devanado del estator, además, en el momento del lanzamiento, se conecta otro auxiliar, pero solo desplazado en ángulo 90 grados. Se realiza con un alambre más grueso para pasar corrientes mayores que las que circulan en el de trabajo.
El diagrama de conexión de dicho motor se muestra en la figura de la derecha.

Aquí, se usa un botón del tipo PNVS para encender, que está especialmente diseñado para tales motores y se usó ampliamente en el funcionamiento de las lavadoras fabricadas en la URSS. Este botón enciende inmediatamente 3 contactos de tal manera que, después de presionar y soltar, los dos extremos quedan fijos en el estado encendido, y el del medio se cierra por un breve tiempo, y luego vuelve a su posición original bajo la acción de la primavera.
Los contactos extremos cerrados se pueden apagar presionando el botón "Stop" adyacente.

Además del interruptor de botón, para deshabilitar el devanado adicional en modo automático, se utilizan los siguientes:
1. interruptores centrífugos;
2. relés diferenciales o de corriente;
Para mejorar el arranque del motor bajo carga, elementos adicionales en un devanado de cambio de fase.
En tal circuito, se monta una resistencia óhmica en serie con el devanado adicional del estator. En este caso, el bobinado de las espiras se realiza de forma bifilar, lo que asegura que el coeficiente de autoinducción de la bobina sea muy cercano a cero.
Debido a la implementación de estas dos técnicas, cuando las corrientes pasan por diferentes devanados, se produce un desfase entre ellos del orden de 30 grados, que es suficiente. La diferencia de ángulo se crea cambiando las resistencias complejas en cada circuito.
Con este método, también puede haber comenzando a enrollar con baja inductancia y alta resistencia. Para esto, se utiliza un devanado con una pequeña cantidad de vueltas de alambre de una sección transversal subestimada.
El cambio de fase capacitivo de las corrientes le permite crear una conexión a corto plazo de un devanado con un condensador conectado en serie. Este circuito solo funciona mientras el motor está encendido y luego se apaga.
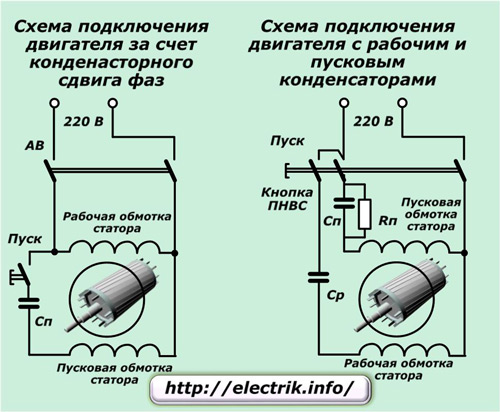
El arranque capacitivo produce más torque y mayor factor de potencia que el arranque resistivo o inductivo. Puede alcanzar el 45÷50% del valor nominal.
En circuitos separados, la capacitancia también se agrega a la cadena del devanado de trabajo, que está constantemente encendida. Debido a esto, las corrientes en los devanados se desvían en un ángulo del orden de π/2. Al mismo tiempo, se nota mucho un cambio en los máximos de amplitud en el estator, lo que proporciona un buen par en el eje.
Gracias a esta técnica, el motor puede generar más potencia durante el arranque. Sin embargo, este método solo se usa con unidades de arranque pesadas, por ejemplo, para hacer girar el tambor. lavadora lleno de lino con agua.
El arranque del condensador le permite cambiar la dirección de rotación de la armadura. Para hacer esto, simplemente cambie la polaridad de la conexión del devanado de arranque o de trabajo.
Conexión motor monofasico con postes partidos
En los motores asíncronos con una pequeña potencia de unos 100 W, se utiliza la división del flujo magnético del estator debido a la inclusión de una bobina de cobre en cortocircuito en el polo del circuito magnético.
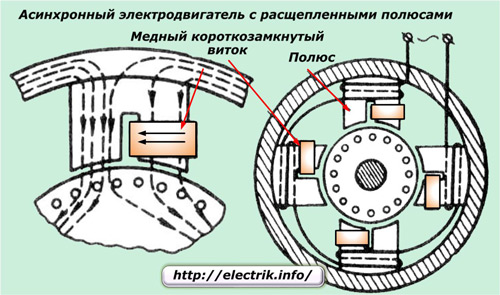
Tal polo cortado en dos partes crea un campo magnético adicional, que se desplaza desde el principal a lo largo del ángulo y lo debilita en el lugar cubierto por la bobina. Esto crea un campo giratorio elíptico que genera un par de dirección constante.
En tales diseños, se pueden encontrar derivaciones magnéticas hechas de placas de acero que cierran los bordes de las puntas de los polos del estator.
Se pueden encontrar motores de diseños similares en dispositivos de ventilador para soplar aire. No tienen la capacidad de revertir.
Le recomendamos que lea
 Características psicológicas de los niños en la adolescencia.
Características psicológicas de los niños en la adolescencia. Transferir a un niño a otra escuela: el procedimiento y los documentos necesarios Si transferir a un niño a otra escuela
Transferir a un niño a otra escuela: el procedimiento y los documentos necesarios Si transferir a un niño a otra escuela, diagnóstico, tratamiento Tratamiento de la clamidia urogenital") Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital
Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué
Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué

