Por la cantidad de torque Motor de inducción el cambio de fase entre la corriente I 2 y e tiene una gran influencia. ds Rotor E 2S.
Considere el caso en que la inductancia del devanado del rotor es pequeña y, por lo tanto, se puede despreciar el cambio de fase (Fig. 223, a).
El campo magnético giratorio del estator se reemplaza aquí por el campo de los polos N y S, girando, digamos, en el sentido de las agujas del reloj. Usando la regla de la mano derecha, determinamos la dirección e. ds y corrientes en el devanado del rotor. Las corrientes del rotor, al interactuar con el campo magnético giratorio, crean un par. Las direcciones de las fuerzas que actúan sobre los conductores que llevan corriente están determinadas por la regla de la mano izquierda. Como se puede ver en el dibujo, el rotor bajo la acción de las fuerzas girará en la misma dirección que el propio campo giratorio, es decir, en el sentido de las agujas del reloj.
Y la armadura también es un conjunto laminado, generalmente ubicado en un eje. Interruptor magnético de cepillo de bobina Fig. Se instala un solo devanado entre polos opuestos de un imán simple. Cuando la bobina está alineada verticalmente, el flujo normal de electrones es del terminal positivo al negativo. La alimentación se realiza mediante cepillos que están en contacto con los segmentos. cambiar. De la ley de inducción electromagnética de Faraday - la regla de la mano izquierda. la parte superior de la bobina estará sujeta a una fuerza de derecha a izquierda.
Considere el segundo caso, cuando la inductancia del devanado del rotor es grande. En este caso, el cambio de fase entre la corriente del rotor I 2 y e. ds el rotor E 2S también será grande. En la Fig. 223, b, el campo magnético del estator de un motor de inducción todavía se muestra en forma de polos N y S que giran en el sentido de las agujas del reloj. La dirección de e. ds queda igual que en la Fig. 223, a, pero debido al retraso de la corriente en fase, el eje campo magnético el rotor ya no coincidirá con la línea neutra del campo del estator, sino que se desplazará un cierto ángulo en contra de la rotación del campo magnético. Esto conducirá al hecho de que junto con la formación de un par dirigido en una dirección, algunos conductores crearán un par opuesto.
La parte inferior estará sujeta a fuerza en la dirección opuesta. Dado que la bobina está diseñada para girar, estas fuerzas crearán un par de torsión que hará que la bobina gire en sentido contrario a las agujas del reloj. El papel del interruptor es asegurar el flujo de electrones. siempre en la dirección correcta ya que cada lado de la bobina marca tus polos. El interruptor incluye segmentos de bronce separados de láminas aislantes de mosquitos. Las escobillas de carbón hacen contacto con un interruptor.
Ángulo de rotación Cambio de par durante la rotación. Si se utilizan dos vueltas de 90° junto con dos imanes separados también a 90°, el par de salida es prácticamente constante. Al introducir una segunda bobina, el conmutador necesita cuatro segmentos separados.
De esto puede verse que el par total del motor durante un cambio de fase entre la corriente y e. ds el rotor es más pequeño que para el caso en que I 2 y E 2S están en fase. Se puede demostrar que el par de un motor de inducción está determinado solo por el componente activo de la corriente del rotor, es decir, la corriente I 2 cos y que se puede calcular mediante la fórmula:
La pérdida total a través del interruptor se debe tanto a la fricción mecánica como a la tensión de la mano. Sin embargo, ambas pérdidas son pequeñas si el motor está equipado con un ventilador. Motores síncronos Los motores síncronos se denominan así porque funcionan a una sola velocidad, es decir, la velocidad de rotación del campo magnético. Se puede realizar la producción de un campo magnético giratorio. usando tres bobinas de estator espaciadas a 120° alimentadas por corriente trifásica. La velocidad de rotación del campo depende de la frecuencia de la corriente.
El diseño mecánico se muestra esquemáticamente en la fig. Característica de par para un motor síncrono. El campo magnético giratorio inducido por las bobinas del estator y del rotor, que se puede comparar con un imán permanente tipo barra que está alineado con el flujo giratorio único producido en el estator. Cuando el eje se acciona mecánicamente, el campo generado por el rotor se elimina de la alineación con el campo generado por el estator. Características motores síncronos generalmente se presentan como variaciones. Se puede ver en la ecuación anterior que los motores síncronos no tienen par de arranque y el rotor debe girarse a la velocidad síncrona por otros medios.
Ф m - flujo magnético del estator (y también aproximadamente igual al flujo magnético resultante del motor de inducción);
Ángulo de fase entre e. ds y corriente de fase de devanado
C es un coeficiente constante.
Después de la sustitución:
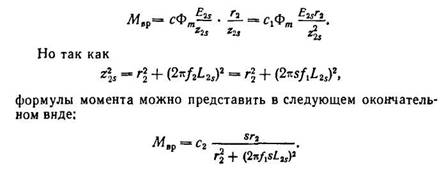
De la última expresión se puede ver que el par del motor de inducción depende del deslizamiento.
Las ventajas de un motor síncrono son la facilidad con la que se puede controlar el factor de potencia. velocidad de rotación constante, independientemente de la carga aplicada. Motores de inducción Estator El motor de inducción se parece a un generador corriente alterna y, si el automóvil es impulsado por corriente, produce un flujo magnético giratorio. El rotor puede estar enjaulado o con anillos colectores.
Representación esquemática de un motor de inducción. En un motor de marco, el rotor está laminado y los conductores tienen barras de cobre desnudas o descubiertas. el aluminio se alimenta a través de las ranuras del rotor. Las varillas se sueldan en cada extremo con anillos o placas para formar paquetes de cables cortos. La máquina deslizante tiene un núcleo laminado y devanado trifásico, similar a un estator, y está conectado a tres anillos en el eje. Se muestra un esquema de un motor de inducción que tiene tres bobinas de estator separadas 120°.
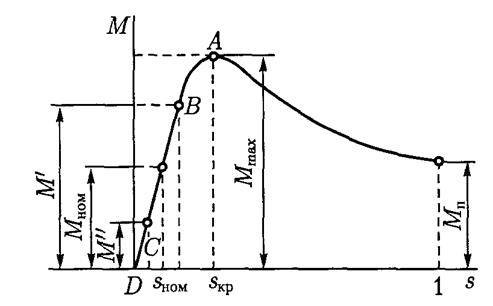
En la Fig. 224 muestra la curva A del par motor frente al deslizamiento. Se puede ver en la curva que en el momento del arranque, cuando s = l y n = 0, el par motor es pequeño. Esto se explica por el hecho de que en el momento del arranque, la frecuencia de la corriente en el devanado del rotor es la más alta y la resistencia inductiva del devanado es grande. Como resultado, cos tiene un valor pequeño (porque
Si las bobinas del estator están alimentadas por una corriente trifásica, se crea un campo magnético giratorio en el estator. La figura muestra una bobina de un solo rotor. En reposo, el campo giratorio inducirá un voltaje en la campana del rotor a medida que cambie el flujo. Si la bobina forma un circuito cerrado, la fuerza EMF inducida inducirá una corriente en la bobina. La fuerza resultante sobre el conductor por el que pasa la corriente dará como resultado un momento, que será. acelerar el rotor. La velocidad del rotor aumentará hasta que se equilibre el par electromagnético. al momento de la carga mecánica.
|
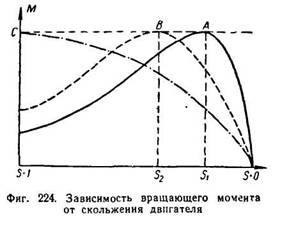
fila 0.1-0.2). Por lo tanto, aunque la corriente de arranque sea grande, el par de arranque será pequeño.
Con algún deslizamiento S 1, el par motor tendrá un valor máximo. Con una disminución adicional del deslizamiento o, en otras palabras, con un aumento adicional de la velocidad de rotación del motor, su par disminuirá rápidamente.
Un motor de inducción nunca alcanzará la velocidad síncrona, ya que sería un movimiento relativo entre el rotor y el campo giratorio de las bobinas, y esto no induciría fuerzas EMF electromagnéticas en las bobinas del rotor y, por lo tanto, ningún par electromagnético. Por lo tanto, los motores de inducción siempre funcionan a una velocidad ligeramente inferior a la velocidad síncrona.
La función par-par se muestra en la figura. Par completamente cargado Par deslizante Fig. Característica de par de un motor asíncrono. Cuando la velocidad del rotor es igual a síncrona, = 0, el par es cero. Si la velocidad del rotor cae por debajo del sincronismo, el par aumenta de forma aproximadamente lineal hasta un valor máximo determinado por el tiempo de carga total y requiere pérdidas excesivas a través del rotor. Un motor de inducción puede considerarse una máquina de velocidad constante. De hecho, la dificultad de cambiar la velocidad es una. Desventaja de un motor asíncrono.
Al escalonar y al deslizar s = 0, el par del motor también será igual a cero.
Cabe señalar que en un motor asíncrono prácticamente no puede existir un deslizamiento igual a cero. Esto solo es posible si el rotor se alimenta externamente con un par en la dirección de rotación del campo del estator.
Par de arranque se puede aumentar si, en el momento del arranque, el cambio de fase entre la corriente y e. ds rotor. De la fórmula
Problemas con los motores asíncronos. arranque del motor, frenado del motor, control de velocidad. También se puede considerar como una versión síncrona discreta del motor. El número de pasos dados debe coincidir con el número de pulsos de control aplicados a las fases del motor. La rotación se realiza realmente con un paso de tiempo finito.
Cuando se aplican las fases del estator, se generan campos magnéticos que interactúan con los flujos de imanes permanentes, creando fuerzas de torsión que mueven el rotor. La alimentación de fase se realiza mediante pulsos de polaridad. intercalado, lo que complica la estructura del dispositivo de control, llamado comando bipolar.
se puede ver que si, con una resistencia inductiva constante del devanado del rotor, la resistencia activa aumenta, entonces el ángulo en sí disminuirá, lo que conducirá al hecho de que el par motor también aumentará. Esto se utiliza en la práctica para aumentar el par de arranque del motor. En el momento del arranque, se introduce una resistencia activa (reóstato de arranque) en el circuito del rotor, que luego se elimina tan pronto como el motor aumenta la velocidad.
Este tipo de motor proporciona pares de motor más altos y par para mantener el rotor incluso en ausencia de alimentación de fase. El rotor consta de un imán cilíndrico magnetizado axialmente. El paso angular varía de 0,9 a -5°, pero el de 1,8° es el más utilizado.
Definición y elementos constructivos. En una máquina de inducción convencional, el campo magnético es creado por variables Corrientes eléctricas. El devanado de estas corrientes se llama devanado primario, que puede ser monofásico o multifásico. Las máquinas monofásicas están construidas para baja potencia hasta unos pocos kilovatios. Las máquinas convencionales son trifásicas.
El aumento del par de arranque hace que se obtenga el par máximo del motor con más deslizamiento (punto S 2 de la curva B de la figura 224). Al aumentar la resistencia activa del circuito del rotor en el arranque, es posible lograr que el par máximo sea en el momento del arranque (s = 1 curva C).
El par de un motor de inducción es proporcional al cuadrado del voltaje, por lo que incluso una pequeña disminución del voltaje va acompañada de una fuerte disminución del par.
La segunda parte activa del coche es el lugar donde se devanado secundario. Por regla general, la parte fija de la máquina actúa como inductor y el rotor es inducido. La máquina de inducción convencional se construye en dos formas: máquinas de inducción con rotores anulares o rotores de devanado, donde un devanado de rotor alterno multifásico está conectado a anillos deslizantes, y máquinas de inducción con uno o más rotores.
La máquina de inducción multifásica puede funcionar como motor, generador o freno electromagnético. Se utiliza en gran medida como motor y es el motor eléctrico más común debido a sus excelentes cualidades, simplicidad estructural y operación segura.
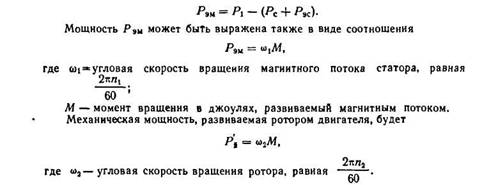
La potencia P 1 suministrada al devanado del estator de un motor de inducción es igual a:
![]()
donde m 1 es el número de fases.
El estator del motor tiene las siguientes pérdidas de energía:
1) en el devanado del estator Res. =m 1 yo 1 2 r 1 ;
2) en el acero del estator y la histéresis y las corrientes de Foucault P C .
La potencia suministrada al rotor es la potencia del campo magnético giratorio, también llamada potencia electromagnética P eM.
La máquina de inducción está construida para tensiones de hasta 10 kV, potencias desde unos pocos vatios hasta decenas de megavatios y desde varios cientos hasta cien mil revoluciones por minuto. Las dimensiones nominales se indican en la placa de identificación del vehículo. El hierro activo es una máquina de inducción que tiene una parte fija, un estator, equipada con un mono o corriente trifásica, así como la parte móvil, el rotor.
La figura 1 muestra un motor asíncrono con un cigüeñal desmontado. En la Fig. La figura 2 muestra una sección longitudinal de un motor asíncrono helicoidal con rotor helicoidal provisto de jaula de ardilla y dispositivo elevador de escobillas en los anillos rozantes. La máquina de inducción tiene un hierro constante, que se toma lo menos posible y se determina por consideraciones mecánicas. El bushing tiene valores de 0,2 a 2 mm, valores pequeños correspondientes a máquinas con una potencia del orden de los vatios, y valores grandes para máquinas potentes con condiciones severas de funcionamiento.
La potencia electromagnética es igual a la diferencia entre la potencia suministrada al motor y las pérdidas en el estator del motor, es decir
|
La diferencia entre Р eM y representa las pérdidas eléctricas en el devanado del rotor Р eP, si despreciamos las pérdidas en el acero del rotor por su insignificancia (la frecuencia de remagnetización del rotor suele ser muy pequeña):
Autos ordinarios con la potencia de un vagón y autos grandes y potentes para condiciones de trabajo pesado. Las crestas son semicerradas. En máquinas con Alto voltaje solo se utilizan ranuras abiertas, donde las bobinas se fabrican por separado. Las máquinas de inducción se utilizan casi exclusivamente en bobinas y en dos capas para obtener un campo magnético con el menor contenido armónico posible. Los devanados del estator en dos capas a menudo se fabrican con un paso corto y los rotores rotativos de dos capas con un paso diametral.
La envoltura en jaulas de tamaño pequeño a mediano se realiza a menudo con rotores de paso corto y de paso diametral de doble capa. El transporte en vehículos de pequeño y mediano tamaño se realiza a gran escala en aluminio a presión, así como en cobre, bronce o latón.
Por tanto, las pérdidas en el devanado del rotor son proporcionales al deslizamiento del rotor.
si de potencia mecánica desarrollado por el rotor, reste las pérdidas mecánicas R mx debidas a la fricción en los cojinetes del rotor, la fricción en el aire, etc., así como las pérdidas adicionales R D que surgen bajo carga y debido a los campos de dispersión del rotor, y las pérdidas causadas por: pulsaciones del campo magnético en los dientes del estator y el rotor, entonces habrá potencia útil en el eje del motor, que denotaremos por P 2 .
Los rotores de cigüeñal son más simples, resistentes y económicos que los anillos anulares, por lo que cuando no se requieren cambios ni velocidades de arranque especiales, se utilizan ampliamente en aplicaciones de potencia baja a media. Para reducir el ruido se utilizan ranuras convencionales con las mayores pendientes posibles e inclinadas hacia los generadores, y en el caso de las micromáquinas se utilizan diseños especiales, como rotores sin ranura, formados por varias capas radiales, axiales o tangenciales, motores de histéresis y cubeta -Motores rotativos en forma.
La eficiencia de un motor de inducción se puede determinar mediante la fórmula:

De la última expresión se puede ver que el momento de rotación de un motor de inducción es proporcional al producto de la magnitud del flujo magnético giratorio, la corriente del rotor y el coseno del ángulo entre e. ds rotor y su corriente,
La forma del automóvil depende del tipo de construcción del automóvil. En general, los vehículos de potencia baja a media tienen levas montadas en escudo, como se ve en las figuras, mientras que los vehículos grandes tienen estatores separados unidos a una placa base común. Los coches pequeños y medianos suelen tener rodamientos, mientras que los grandes los tienen deslizantes. Cuando se usa un funcionamiento suave, los cojinetes lisos también se usan para automóviles pequeños.
El hierro fundido y el acero se utilizan como material de fundición. Los aceros se utilizan tanto normalmente como cuando se pretende reducir el peso de un vehículo. Las máquinas de hasta 4 kW suelen estar equipadas con carcasas de aluminio. La máquina de inducción funciona en modo generador, motor o freno en relación con la velocidad del rotor del rotor en relación con el campo magnético síncrono del campo magnético inverso. Cuando la energía electromagnética ingresa al rotor y funciona mecánicamente al aire libre, se produce el modo motor.

Del circuito equivalente de un motor asíncrono se obtiene el valor de la corriente reducida del rotor, que damos sin demostración.
![]()
La dependencia gráficamente expresada del momento electromagnético en el deslizamiento se llama característica mecánica motor de inducción (Fig. 3.3).
Arroz. 3.3. Característica mecánica del motor asíncrono
Se puede usar una fórmula simplificada para calcular el par electromagnético de un motor de inducción (fórmula de Kloss) para construir características mecánicas

En este caso, el deslizamiento crítico está determinado por la fórmula
![]()
donde λ m \u003d M max / M nom - capacidad de sobrecarga del motor.
Al calcular la característica mecánica, debe tenerse en cuenta que con valores de deslizamiento que superan el valor crítico, la precisión de los cálculos disminuye considerablemente. Esto se debe a un cambio en los parámetros del circuito equivalente de un motor asíncrono, causado por la saturación magnética de los dientes del estator y del rotor, y un aumento en la frecuencia de la corriente en el devanado del rotor.
La forma de las características mecánicas de un motor de inducción depende en gran medida de la magnitud del voltaje aplicado al devanado del estator. tu 1 (Fig. 3.4) y la resistencia activa del devanado del rotor r"2 (figura 3.5).

Arroz. 3.4. Influencia del voltaje tu 1 sobre las características mecánicas del motor de inducción
Los datos que se dan en los catálogos de motores asíncronos no suelen contener información sobre los parámetros del circuito equivalente, lo que dificulta la aplicación de fórmulas para el cálculo del par electromagnético. Por lo tanto, para calcular el momento electromagnético, se suele utilizar la fórmula

Arroz. 3.5. Influencia de la resistencia r" 2 sobre las características mecánicas del motor de inducción
Las propiedades operativas de un motor asíncrono están determinadas por sus características de rendimiento: la dependencia de la velocidad de rotación norte 2, esfuerzo de torsión del eje METRO 2, eficiencia y factor de potencia porqueφ 1 de la carga útil del motor R 2 .
Al calcular los parámetros para determinar el rendimiento de los motores de inducción, se utiliza un método gráfico basado en la construcción de un gráfico circular o un método analítico.
La base para realizar cualquiera de los métodos de cálculo del rendimiento son los resultados de las pruebas de circuito abierto y cortocircuito. Si el motor está diseñado, estos datos se obtienen en el proceso de su cálculo.
Al calcular la resistencia de las resistencias. r ext, utilizado en circuitos de estator o rotor de fase para limitar la corriente de arranque o el control de velocidad, utilice el principio: para este motor asíncrono en particular, deslizamiento s proporcional a la resistencia activa del circuito del rotor de este motor. De acuerdo con esto, la igualdad
(r 2 + r ext) /s= r2/s nombre,
dónde r2- resistencia activa del propio devanado del rotor a la temperatura de funcionamiento; s- deslizamiento cuando se inserta una resistencia en el circuito del rotor con una resistencia r ext.
A partir de esta expresión, obtenemos una fórmula para calcular la resistencia activa de la resistencia adicional g a 6, necesaria para obtener un deslizamiento aumentado dado s a una carga dada (nominal):
r ext = r 2 (s/s nominal - 1).
Hay dos métodos para calcular los reóstatos de partida: gráfico y analítico.
Método gráfico más preciso, pero requiere la construcción de una característica mecánica natural y un diagrama de arranque del motor, lo que está asociado con una gran cantidad de trabajo gráfico.
Método analítico el cálculo de los reóstatos iniciales es más simple, pero menos preciso. Esto se debe a que el método se basa en la suposición de la rectitud de la sección de trabajo de la característica mecánica natural de un motor de inducción. Pero cuando el deslizamiento es casi crítico, esta suposición provoca un error notable, que es tanto más significativo cuanto más cercano es el par de arranque inicial. METRO 1 al par máximo METRO m ah Por lo tanto, el método analítico de cálculo es aplicable solo para los valores del par de arranque inicial METRO 1 < 0.7 METRO m ah .
La resistencia de las resistencias en las etapas del reóstato de arranque:
tercera r ext3 = r 2 (λ m - 1);
segundo r ext2 = r añadir 3 λm;
primero r ext1 = r añadir 2 λ m,
dónde r 2 - resistencia activa del devanado de fase del rotor del motor de inducción,
dónde mi 2 y yo 2nom - datos de catálogo para el tamaño de motor seleccionado.
La resistencia del reóstato de arranque en sus pasos:
primera R PR1 = r ext1 + r ext2 + r ext3;
segundo R PR2 = r ext2 + r ext3
tercera R PR2 = r ext3 .
Para limitar la corriente de arranque de motores asíncronos con rotor de jaula de ardilla aplicar circuitos especiales para su inclusión con elementos que limiten la corriente de arranque. Todos estos métodos se basan en reducir el voltaje aplicado al devanado del estator. Los circuitos más utilizados con la inclusión de resistencias o estranguladores en los cables lineales del estator (ver Fig. 3.14, b).El cálculo de la resistencia requerida de estos elementos para una reducción dada de la corriente de arranque a, relativa a su valor natural, se realiza según las fórmulas:
para resistencias con resistencia activa
R norte = 
para estranguladores
X L= 
Impedancia del motor en modo de cortocircuito Z k, ohm,
Z k =T 1 /yo PAGS
Aquí X para y r k - componentes inductivos y activos de esta resistencia
R k = Z k cosφ k ; X k =
Reducción del par de arranque artificial cuando se enciende R o L cantidad a
α metro = α 2 i
Tabla 3.1
Por lo tanto, si se establece el valor α m, que determina el valor del par de arranque artificial M "n, entonces para calcular los valores correspondientes R ni x largo puede usar las fórmulas anteriores, sustituyendo en ellas en lugar de α 2 i, el valor de α m.
Resistencia eléctrica los devanados del motor indicados en los catálogos suelen corresponder a una temperatura de +20 °C. Pero al calcular las características y parámetros de los motores, la resistencia de sus devanados debe llevarse a la temperatura de funcionamiento. De acuerdo con la norma vigente, la temperatura de funcionamiento se toma en función de la clase de resistencia al calor aislamiento electrico aplicado en el motor: con resistencia al calor clase B, la temperatura de funcionamiento es de 75 ° C, y con resistencia al calor clases F y H - 115 ° C. El recálculo de las resistencias de los devanados a la temperatura de funcionamiento se realiza multiplicando la resistencia de los devanados a una temperatura de 20 °C, por el coeficiente de calentamiento k t:
r= r 20k t.
Los valores de este coeficiente se toman en función de la finalidad de los motores y de sus dimensiones (altura del eje de giro) (Tabla 3.1).
MÁQUINAS SINCRONICAS
CONCEPTOS BÁSICOS
Un rasgo característico de las máquinas síncronas es una conexión rígida entre la velocidad del rotor norte 1 y frecuencia AC en el devanado del estator F 1:
norte 1 = F 1 60/ R.
En otras palabras, el campo magnético giratorio del estator y el rotor de la máquina síncrona giran sincrónicamente, es decir, con la misma frecuencia.
Según su diseño, las máquinas síncronas se dividen en polo saliente y polo no saliente. En las máquinas síncronas de polos salientes, el rotor tiene polos pronunciados, en los que se ubican las bobinas del devanado de campo, alimentadas corriente continua. Un rasgo característico de tales máquinas es la diferencia en la resistencia magnética a lo largo del eje longitudinal (a lo largo del eje de los polos) y a lo largo del eje transversal (a lo largo del eje que pasa en el espacio interpolar). Resistencia magnética al flujo del estator a lo largo del eje longitudinal dd mucho menos resistencia magnética al flujo del estator a lo largo eje transversal qq. En las máquinas síncronas de polos no salientes, las resistencias magnéticas a lo largo de los ejes longitudinal y transversal son las mismas, ya que el entrehierro para estas máquinas a lo largo del perímetro del estator es el mismo.
El diseño del estator de una máquina síncrona, en principio, no difiere del estator. máquina asíncrona. En el devanado del estator, durante el funcionamiento de la máquina, se induce EMF y fluyen corrientes que crean una fuerza magnetomotriz (MFF), cuyo valor máximo es
F 1 =0,45metro 1 yo 1 w 1k rev1 / R
Este MDS crea un campo magnético giratorio y en el espacio de aire δ la máquina crea una inducción magnética, cuyo horario de distribución dentro de cada división de polos t depende del diseño del rotor (Fig. 4.1).
Para una máquina síncrona de polos salientes, la ecuación de tensión es válida:
Ú 1 =Ė 0 + Ė 1d + Ė 1q+ Ė σ1 – İ 1 r 1
dónde Ė 0 - el EMF principal de la máquina síncrona, proporcional al flujo magnético principal de la máquina síncrona F 0 ; Ė 1 d - FEM de la reacción del inducido de la máquina síncrona a lo largo del eje longitudinal, proporcional a la MMF de la reacción del inducido a lo largo del eje longitudinal F 1d; Ė σ1 - reacción de armadura FEM a lo largo del eje transversal, proporcional a la reacción de armadura FEM a lo largo del eje transversal F 1q; Ė σ1 - EMF de fuga, debido a la presencia de un flujo magnético de fuga F 0, el valor de este EMF es proporcional a la resistencia inductiva de la fuga del devanado del estator X 1
Ė σ1 = jİ 1r
İ 1 r 1 - caída de tensión activa en el devanado de fase del estator, por lo general, este valor se desprecia al resolver problemas debido a su pequeño valor.
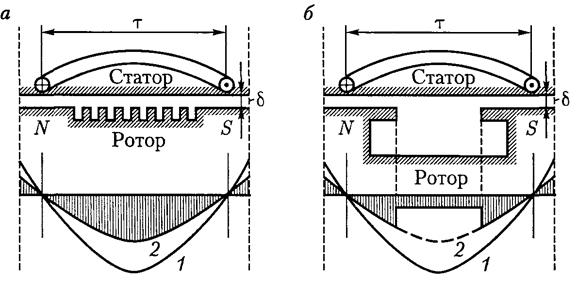
Arroz. 4.1. Gráficos de la distribución de la inducción magnética a lo largo del eje transversal
polo implícito ( a) y polo explícito ( b)máquinas síncronas:
1 - calendario MDS; 2 - gráfico de inducción magnética
Para una máquina síncrona de polos no salientes, la ecuación de tensión tiene la forma
Ú 1 =Ė 0 + Ė C- İ 1 r 1
Aquí
Ė c= Ė 1 + Ė σ1
dónde Ė 1 - Reacción de armadura fem de una máquina síncrona de polos implícitos. Las ecuaciones de tensión consideradas corresponden a diagramas vectoriales de tensión. Estos diagramas deben construirse para determinar la fem principal de la máquina mi 0, o tensión del devanado del estator tu 1. Debe tenerse en cuenta que las ecuaciones de voltaje y los diagramas vectoriales correspondientes no tienen en cuenta la saturación magnética del circuito magnético de una máquina síncrona, que, como saben, afecta el valor de las resistencias inductivas, haciendo que se disminuir. Contabilizar esta saturación es una tarea difícil, por lo tanto, al calcular la FEM y los voltajes de las máquinas síncronas, generalmente usan diagrama practico EMF, que tiene en cuenta el estado de saturación del sistema magnético, provocado por la acción de la reacción del inducido cuando se carga la máquina síncrona. Al construir un diagrama EMF práctico, la fuerza de magnetización de la reacción del inducido no se descompone en componentes longitudinales y transversales, por lo tanto, este diagrama se puede usar tanto en los cálculos de máquinas de polos salientes como de polos implícitos.
Al resolver problemas asociados con generadores síncronos conectados en paralelo con la red o con motores síncronos, utilizan características angulares máquinas síncronas, que representan la dependencia del momento electromagnético METRO desde el ángulo de carga θ. En este caso, conviene recordar que en las máquinas síncronas de polos salientes hay dos puntos: el principal METRO principal y reactivo METRO p, y en máquinas de polos no salientes, solo el punto principal:
![]()
El ángulo de carga θ nom corresponde al par nominal METRO nom. El par máximo de la máquina síncrona determina la capacidad de sobrecarga de la máquina síncrona, que es importante tanto para generadores síncronos operando en paralelo con la red, y para motores síncronos. En máquinas síncronas de polos no salientes momento máximo corresponde al ángulo de carga θ = 90°, en máquinas de polos salientes θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного momentos electromagnéticos esta maquina.
Para calcular el ángulo de carga crítico, que determina la capacidad de sobrecarga de las máquinas síncronas de polos salientes, puede utilizar la expresión.





