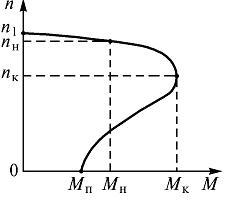
Pro každého indukční motor lze definovat jmenovitý režim, tedy režim dlouhodobého provozu, při kterém nedochází k přehřívání motoru nad nastavenou teplotu. Vyvolá se jmenovitý moment M odpovídající jmenovitému režimu. jmenovitý moment. Odpovídající jmenovitý skluz pro asynchronní motory středního výkonu je s H0M = 0,02 ... 0,06, tzn. jmenovité otáčky n a ohm jsou uvnitř
n nom = n 0 (1 - s 0) \u003d (0,94 ... 0,98) p 0
Poměr maximálního momentu k nominálnímu k m = = Mmax / M nom se nazývá přetížitelnost asynchronního motoru. Obvykle k m \u003d 1,8 ... .2,5.
Při rozběhu, tedy při rozjezdu a při akceleraci, je asynchronní motor v podmínkách výrazně odlišných od podmínek běžného provozu. Moment vyvíjený motorem musí překročit moment odporu zátěže, jinak motor nebude schopen zrychlit. Z hlediska spouštění motoru tedy hraje důležitou roli jeho rozběhový moment.
Poměr počátečního točivého momentu M p vyvinutého motorem ve stacionárním stavu, tj. při n \u003d 0, k jmenovitému točivému momentu kp \u003d Mp / M nom, se nazývá násobek počátečního točivého momentu.
Maximální moment M max se nazývá kritický moment asynchronního stroje. Provoz stroje s kroutícím momentem převyšujícím jmenovitý je možný jen krátkodobě, jinak se jeho přehříváním snižuje životnost stroje.
V důsledku interakce rotujícího magnetického toku s proudy jím indukovanými ve vodičích vinutí rotoru vznikají síly, které působí na tyto vodiče v tangenciálním směru. Zjistime hodnotu momentu vytvořeného těmito silami na hřídeli stroje.
Elektromagnetický výkon přenášený na rotor rotujícím magnetickým polem se rovná:
kde M uh - elektromagnetický moment působící na rotor.
Podle ekvivalentního obvodu jedné fáze stroje:
Z těchto výrazů zjistíme:
Vzhledem k aktuálnímu proudu rotoru, EMF, indukční reaktance dostaneme:
Zavedeme konstantu a zanedbáme moment tření, výraz pro moment na hřídeli znázorníme ve tvaru:
Pokud je magnetický tok Ф vyjádřen ve weberech, proud I 2 - v ampérech, pak točivý moment bude v newtonmetrech (Nm).
Točivý moment stroje závisí na zatížení f, I 2 a , ale může být reprezentován jako funkce jedné proměnné. Jako takovou proměnnou pro indukční motor je nejvhodnější zvolit skluz s.
Podle dříve studovaných vzorců:
Za předpokladu, že se frekvence sítě nezmění, zavádíme
36. Způsoby regulace rychlosti otáčení peklo se zkratem. rotor
37.Spusťte a ovládejte rychlost rotace krevního tlaku pomocí f.r.
Regulace změnou skluzu se provádí změnou odporu R p nastavovacího reostatu v obvodu rotoru.
Zavedením reostatu do obvodu rotoru se změní závislost krouticího momentu M na skluzu s bez ovlivnění velikosti maximálního krouticího momentu. Tři charakteristiky M(s): přirozená (nereostatová) charakteristika 1 odpovídá zkratovanému vinutí rotoru (odpor reostatu = 0), reostatická (umělá) charakteristika 2 a 3 odpovídá zavedenému jednomu a dvěma stupňům reostatu.
Zavedení reostatu do obvodu rotoru má pozitivní vliv na rozběhový proud, snižuje jej asi 2x oproti zkratovanému IM.
Nevýhody této metody: 1) nízká účinnost v důsledku ztrát v reostatu R p ; 2) snížení tuhosti mechanických charakteristik; 3) rychlost lze nastavit pouze směrem dolů.
Spouštění asynchronního motoru s fázovým rotorem. Rozběh asynchronních motorů se výrazně liší od podmínek běžného provozu. Moment motoru při rozběhu musí překročit moment odporu zátěže, roli hraje rozběhový moment. Druhou důležitou charakteristikou rozběhu je rozběhový proud. Poměr rozběhového proudu pro motory s klecový rotor dosáhne 5-7, což může být pro motor nebo síť nepřijatelné a může mít vliv na plynulost startu. Spouštění motoru s fázovým rotorem se provádí přes 3-fázový reostat, jehož každá fáze je připojena přes kartáče a kroužky k jedné z fází rotoru. Na začátku startu je reostat plně zasunut, ke konci startu je vyjmut a všechny tři fáze rotoru jsou zkratovány. Počet kroků reostatu je větší než dva a spínací proces při spuštění je obvykle automatizován. Zavedení aktivních odporů do obvodu fázového rotoru zvyšuje točivý moment a zajišťuje hladký rozběh a omezuje rozběhový proud. Tento způsob spouštění má řadu výhod, ale je použitelný pouze pro motory s fázovým rotorem.
39,40. Zařízení, princip činnosti motoru stejnosměrný proud. Excitační metody. EMF vinutí kotvy a elektromagnetický moment Konstrukce a princip činnosti stejnosměrného motoru Stejnosměrný motor se skládá z pevné části - statoru a rotující části - kotvy, oddělených vzduchovou mezerou. Hlavní přídavné póly jsou připevněny k vnitřní ploše statoru. Hlavní póly s budicími vinutími slouží k vytvoření hlavního magnetického toku F ve stroji a přídavné ke snížení jiskření.
Kotva se skládá z hřídele, jádra, vinutí a kolektoru. Kolektor obsahuje od sebe izolované měděné desky, které jsou spojeny s sekcemi vinutí kotvy. Na kolektoru jsou umístěny pevné kartáče; propojení vinutí kotvy s vnějším elektrickým obvodem. V důsledku interakce proudu kotvy Iya A magnetického toku Ф vzniká krouticí moment M = CmFIa, kde Cm je momentová konstanta, která závisí na konstrukčních datech stroje. Točivý moment M motoru je vyvážen momentem odporu Ms pracovního stroje. Když se kotva otáčí s frekvencí n, její vinutí protíná magnetický tok Ф a v něm se podle zákona elektromagnetické indukce indukuje proti-EMF E \u003d CeFp, kde Ce je konstruktivní konstanta.
Napětí na ezhimax U kotvy se rovná součtu EMF a úbytku napětí na odporu kotevního obvodu U=E +RyaIya=CeFn, odkud proud kotvy Ia=(U-CeFn)/Rya a rychlost n=(U-RyaIya)/CeF/
V závislosti na způsobu napájení budícího vinutí jsou DC generátory:
| abeceda) |
Rýže. 50. Buzení generátoru: a - nezávislé, b - paralelní, c - sériové, d - smíšené.
V nezávislé vzrušení OB je napájen z externího zdroje. Používá se v případech, kdy je potřeba regulovat budicí proud I in a napětí U na kleštích stroje v širokém rozsahu. Proud kotvy se rovná zatěžovacímu proudu I I \u003d I n (obr. 50, a)
Generátory s vlastním buzením mají OB napájené samotným generátorem.
Když je OB zapnut paralelně s vinutím kotvy, máme generátor s paralelní buzení(obr. 50, b), ve kterém I I \u003d I n + I c. Pro výkonné stroje normálního provedení je I in obvykle 1-3% a pro malé stroje - až několik desítek% proudu kotvy. U generátoru s sekvenční buzení(obr. 50, c) ORP je zapojen do série s kotvou, tzn.
I i \u003d I n \u003d I c.
Generátory se smíšeným buzením mají dvě budicí vinutí, OB je zapojen paralelně s kotvou a druhý ORP je v sérii (obr. 50, d). Hlavní bývá OB. ORP magnetizuje stroj se zvýšením zatěžovacího proudu, který kompenzuje úbytek napětí U ve vinutí kotvy a demagnetizační účinek reakce kotvy.
Napětí U 1 aplikované na fázi vinutí statoru je vyváženo hlavním EMF E 1, únikovým EMF a úbytkem napětí na aktivním odporu vinutí statoru:
Ve vinutí rotoru bude podobná rovnice vypadat takto:
Ale protože je vinutí rotoru uzavřeno, napětí U 2 \u003d 0, a pokud vezmeme v úvahu také E 2s \u003d SE 2 a x 2s \u003d Sx 2, pak lze rovnici přepsat jako:
![]()
Rovnice pro proudy indukčního motoru opakuje podobnou rovnici pro transformátor:
28 Točivý moment asynchronního motoru
Točivý moment v indukčním motoru vzniká interakcí rotorového proudu s magnetickým polem stroje. Točivý moment lze matematicky vyjádřit jako elektromagnetický výkon stroje:
kde w 1 = 2 pn 1 /60 - úhlová frekvence otáčení pole. ve svém pořadí, n 1 =f 1 60/R, pak
![]()
Nahraďte ve vzorci M 1 výraz REm=Pe2/S a po dělení 9,81 dostaneme:
![]()
Rovnice točivého momentu indukčního motoru
Z toho vyplývá, že moment motoru je úměrný elektrickým ztrátám v rotoru. V posledním vzorci dosaďte aktuální hodnotu já 2 ’ :
dostaneme rovnici pro točivý moment indukčního motoru:
kde U 1 - fázové napětí vinutí statoru.
29 .Mechanická charakteristika motoru se nazývá závislost otáček rotoru na kroutícím momentu na hřídeli n = f (M2). Protože volnoběžný moment je při zatížení malý, pak M2 ≈ M a mechanická charakteristika je reprezentována závislostí n = f (M). Pokud vezmeme v úvahu vztah s = (n1 - n) / n1, pak lze mechanickou charakteristiku získat uvedením její grafické závislosti v souřadnicích n a M (obr. 1).
Rýže. 1. Mechanická charakteristika asynchronního motoru
Přirozená mechanická charakteristika indukčního motoru odpovídá hlavnímu (pasovému) obvodu jeho zařazení a jmenovitým parametrům napájecího napětí. Umělé vlastnosti jsou získány, pokud jsou zahrnuty jakékoli další prvky: rezistory, reaktory, kondenzátory. Když je motor napájen jiným než jmenovitým napětím, charakteristiky se také liší od přirozené mechanické charakteristiky.
Mechanické vlastnosti jsou velmi pohodlné a užitečný nástroj při analýze statických a dynamických režimů elektrického pohonu.
30 Mechanická charakteristika a samoregulace motoru. Graf spojující mechanické veličiny - otáčky a točivý moment - se nazývá mechanická charakteristika asynchronního motoru (obr. 7) n = ƒ(M). Samoregulace asynchronního motoru je následující. Nechte motor v nějakém režimu stabilně pracovat, vyvíjet otáčky n1 a točivý moment M1. Při rovnoměrném otáčení je tento moment roven brzdnému momentu M t1, tj. M1=M t 1, n1= konstituce. Zvýšení brzdného momentu na M2 způsobí snížení rychlosti stroje, protože brzdný moment bude větší než moment. S poklesem rychlosti se zvyšuje skluz, což zase způsobuje zvýšení EMF a proudu v rotoru. To zvyšuje točivý moment motoru. Tento proces končí, když se točivý moment M2 vyvinutý motorem rovná M t 2. V tomto případě je rychlost otáčení nastavena nižší než n1. Nazývá se vlastnost automatické rovnováhy mezi brzděním a kroutícím momentem samoregulace.
Na laboratorním stojanu je motor zatížen elektrickou brzdou, tvořenou elektromagnetem, v jehož mezeře se otáčí kotouč nasazený na hřídeli motoru. Změnou napětí napájejícího cívku elektromagnetu rukojetí autotransformátoru je možné změnit brzdnou sílu, jejíž moment je: M TORM \u003d F r (N m)
kde F je síla (síla) působící na obvod řemenice, (N);
r - poloměr řemenice, rovný 0,18 m. Užitný výkon na hřídeli motoru:
kde n- otáčky motoru, ot./min.
kde ƒ - frekvence sítě (rovná se 50 Hz),
R- počet párů pólů vinutí statoru (rovný 2).
n 1 - synchronní rychlost otáčení magnetické pole.
Otáčky motoru se zjišťují pomocí otáčkoměru. Skluz se vypočítá podle vzorce:
31 Provozní vlastnosti volala mocenské závislosti, spotřebované motorem, spotřebovaný proud I, účiník, otáčky motoru, účinnost a moment M z užitečného výkonu motoru přiváděného na hřídel. Výkonové charakteristiky určují základní výkonové vlastnosti indukčního motoru. Výkonové charakteristiky asynchronního motoru se středním výkonem jsou uvedeny na Obr. 8.8. Jejich chování je vysvětleno následovně. Při nízké zátěži může být proud motoru I (proud naprázdno) mezi 20 % a 70 % jmenovitého proudu. S rostoucí zátěží se zvyšuje proud v obvodu rotoru, což vede k téměř úměrnému zvýšení proudu já v obvodu statoru.

Obr.8.8 Moment motoru () je také téměř úměrná zatížení, ale při vysokém zatížení je linearita grafu poněkud narušena snížením otáček motoru. Výkonová charakteristika vyjadřuje vztah mezi výkonem vyvinutým motorem a fázovým posunem mezi statorovým proudem a napětím. Asynchronní motor, stejně jako transformátor, spotřebovává proud I ze sítě, který je výrazně mimo fázi s použitým napětím. Například v klidovém režimu. S rostoucím zatížením hřídele motoru se zvyšují a zvyšují aktivní složky rotoru a statorových proudů . Maximální hodnoty je dosaženo při .
S dalším zvýšením se hodnota poněkud sníží. To je způsobeno zvýšením skluzu s, což způsobí zvýšení reaktance vinutí rotoru a v důsledku toho fázový posun . Z zvyšuje a zvyšuje, tzn. se sníží.
Chování provozní charakteristika je vysvětleno následovně. Hodnota účinnosti je dána poměrem užitečného výkonu k výkonu odebíranému ze sítě.
Hodnota se nazývá ztráta výkonu. Kromě ztrát v oceli statoru a rotoru v důsledku reverzace magnetizace a vířivých proudů, které lze spolu s mechanickými ztrátami považovat za konstantní, dochází u asynchronního motoru ke ztrátám v mědi. ,
těch. ve vinutí statoru a rotoru, které jsou úměrné druhé mocnině protékajícího proudu a tedy závislé na zatížení. Při volnoběhu, stejně jako u transformátoru, převažují ztráty v oceli, protože a je roven proudu naprázdno, který je malý. Při malém zatížení hřídele zůstávají ztráty v mědi stále malé, a proto účinnost určená vzorcem ![]() (8.5)
(8.5)
zpočátku prudce narůstá. Když se pevné ztráty rovna ztrátám závislým na zatížení , účinnost dosáhne své maximální hodnoty. S dalším nárůstem zátěže výrazně rostou proměnlivé výkonové ztráty, v důsledku čehož účinnost znatelně klesá. Povaha závislosti ) lze vysvětlit ze vztahu . Pokud účinnost byl konstantní, pak by existoval lineární vztah mezi a. Ale od účinnosti závisí na a tato závislost zpočátku prudce narůstá a s dalším zvyšováním zátěže se mírně mění, pak křivka ) nejprve se zvyšuje pomalu a poté prudce.
32 Na kterékoli elektrický obvod součet výkonů všech zdrojů elektrické energie se musí rovnat součtu výkonů všech přijímačů a pomocných prvků. Po předchozím získání výkonových výrazů je možné napsat v obecné podobě rovnici výkonové bilance pro jakýkoli elektrický obvod:
Σ E → já → + Σ U ← já → = Σ E ← já → + Σ U → já → + Σ já 2 r.
Rovnici (1.35) lze napsat jak pro skutečné EMF směry, napětí a proudy, tak pro případ, kdy některé z nich jsou libovolně zvolené kladné směry. V prvním případě budou všechny členy v něm kladné a odpovídající prvky obvodu budou ve skutečnosti zdroje nebo přijímače elektrické energie. Pokud jsou na druhou stranu některé termíny psány s ohledem na libovolně zvolené pozitivní směry, je třeba odpovídající prvky považovat za zamýšlené zdroje a přijímače. V důsledku výpočtu nebo analýzy se některé z nich mohou ukázat jako negativní. To bude znamenat, že některé z předpokládaných zdrojů jsou ve skutečnosti jímky a některé předpokládané výlevky jsou zdrojem.
33 Spouštění asynchronního motoru je provázen přechodovým dějem stroje spojeným s přechodem rotoru z klidového stavu do stavu rovnoměrného otáčení, při kterém kroutící moment motoru vyrovnává moment odporových sil na hřídeli stroje. Při spouštění asynchronního motoru dochází ke zvýšené spotřebě elektrické energie z napájecí sítě, která se vynakládá nejen na překonání brzdného momentu působícího na hřídel a pokrytí ztrát v samotném asynchronním motoru, ale také na sdělování určité kinetické energie. na pohyblivé části výrobní jednotky. Proto musí asynchronní motor při spouštění vyvinout zvýšený točivý moment. Pro asynchronní motor s fázovým rotorem počáteční rozběhový moment, odpovídající skluzu sp = 1, závisí na činných odporech nastavitelných odporů zavedených do obvodu rotoru.
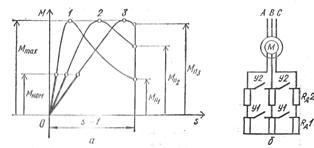
Rýže. 1. Spouštění třífázového asynchronního motoru s fázovým rotorem: a - grafy závislosti točivého momentu motoru s fázovým rotorem na skluzu při různých činných odporech rezistorů v obvodu rotoru, b - schéma zařazení odporů a zrychlovacích uzavíracích kontaktů v obvodu rotoru. Takže při sepnutých akceleračních kontaktech U1, U2, tj. při spouštění asynchronního motoru se zkratovanými kontaktními kroužky, je počáteční rozběhový moment Mp1 = (0,5 -1,0) Mnom a počáteční rozběhový proud Ip = (4,5 - 7) Inom a více. Malý rozběhový moment asynchronní motor s navinutým rotorem nemusí stačit k pohonu výrobní jednotky a jejímu následnému urychlení a značný rozběhový proud způsobí zvýšené zahřívání vinutí motoru, který omezuje frekvenci jeho zapínání a v sítích s nízkým výkonem vede k dočasnému poklesu napětí, který je nežádoucí pro provoz ostatních přijímačů. Tyto okolnosti mohou být důvodem, který vylučuje použití asynchronních motorů s fázovým rotorem s velkým rozběhovým proudem pro pohon pracovních mechanismů. Zavedení nastavitelných odporů, nazývaných spouštěcí odpory, do obvodu rotoru motoru nejen snižuje počáteční rozběhový proud, ale současně zvyšuje počáteční rozběhový moment, který může dosáhnout maximálního momentu Mmax (obr. 1, a, křivka 3 ), pokud je kritický skluz motoru s fázovým rotorem scr \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, kde Rd" je aktivní odpor rezistoru umístěného ve fázi vinutí rotoru motoru, redukované na fázi vinutí statoru. Další zvýšení aktivního odporu rozběhového odporu je nepraktické, protože vede k zeslabení počátečního rozběhového momentu a výstupu bodu maximálního momentu do oblasti skluzu s > 1, což vylučuje možnost zrychlení rotoru. Požadovaný činný odpor rezistorů pro spouštění motoru s fázovým rotorem je určen na základě požadavků na spouštění, což může být snadné, když Mp = (0,1 - 0,4) Mnom, normální, pokud Mp - (0,5 - 0,75) Mnom, a těžké při Mp ≥ Mnom. Pro udržení dostatečně velkého krouticího momentu motorem s fázovým rotorem při akceleraci výrobní jednotky, aby se zkrátila doba přechodného procesu a snížilo se zahřívání motoru, je nutné postupně snižovat aktivní odpor startovací odpory. Přípustná změna krouticího momentu při zrychlení M(t) je určena elektrickými a mechanickými podmínkami, které omezují mez špičkového krouticího momentu M > 0,85 Mmax, spínací moment M2 > > Ms (obr. 2), jakož i zrychlení.

Rýže. 2. Rozběhová charakteristika třífázového asynchronního motoru s fázovým rotorem. Spínání rozběhových odporů je zajištěno postupným spínáním zrychlovacích stykačů Y1, resp. Y2 v časech t1, t2 počítaných od okamžiku nastartování motoru, kdy se při zrychlování moment M rovná spínacímu momentu M2. Díky tomu jsou během celého rozběhu všechny špičkové momenty stejné a všechny spínací momenty jsou si navzájem rovné. Protože točivý moment a proud asynchronního motoru s fázovým rotorem spolu souvisí, je možné nastavit limit špičkového proudu I1 \u003d (1,5 - 2,5) Inom a spínací proud I2 při zrychlení rotoru, což by mělo zajistit spínací moment M2\u003e Mc. Odpojení asynchronních motorů s fázovým rotorem od napájecí sítě se provádí vždy při zkratovaném obvodu rotoru, aby nedocházelo k přepětí ve fázích vinutí statoru, které může 3-4x překročit jmenovité napětí těchto fází. pokud je obvod rotoru v okamžiku vypnutí motoru otevřený.
34 Regulace frekvence. Tento způsob regulace otáček umožňuje použití nejspolehlivějších a nejlevnějších asynchronních motorů s rotorem nakrátko. Pro změnu frekvence napájecího napětí je však zapotřebí zdroj elektrického proudu s proměnnou frekvencí. Jako poslední se používají buď synchronní generátory s proměnnou rychlostí, nebo frekvenční měniče - elektrické nebo statické, vyrobené na řízených polovodičových ventilech (tyristorech). V současné době mají frekvenční měniče poměrně složitý obvod a relativně vysoké náklady. Rychlý vývoj technologie výkonových polovodičů nám však umožňuje doufat v další zlepšování frekvenčních měničů, což otevírá vyhlídky na široké uplatnění regulace frekvence. Podrobný popis regulačních zákonů pro regulaci frekvence a analýza činnosti asynchronního motoru při napájení z frekvenčního měniče jsou uvedeny v § 4.13 a 4.14. Regulace změnou počtu pólů. Tato regulace umožňuje skokovou změnu rychlosti. Na Obr. zobrazeno 4,35 nejjednodušší obvod(pro jednu fázi), což umožňuje dvakrát změnit počet pólů vinutí statoru. K tomu je každá fáze statorového vinutí rozdělena na dvě části, které se přepínají ze sériového zapojení na paralelní. Z obrázku je to vidět když jsou cívky 1-2 a 3-4 zapnuty ve dvou paralelních větvích, počet pólů se sníží na polovinu a v důsledku toho se frekvence rotace magnetického pole zdvojnásobí. Při spínání se počet sériově zapojených závitů v každé fázi sníží na polovinu, ale protože se rychlost otáčení zdvojnásobí, EMF indukovaný ve fázi zůstává nezměněn. Proto lze motor při obou rychlostech připojit k síti se stejným napětím. Aby nedošlo k přepnutí vinutí rotoru, provádí se druhé zkratovaný. Pokud potřebujete mít tři nebo čtyři rychlosti, pak se na stator umístí další vinutí, jehož spínáním získáte další dvě frekvence. Nazývají se indukční motory s přepínáním pólů vícerychlostní. Regulace zapojením reostatu do okruhu rotoru. Když jsou v obvodu rotoru zahrnuty další aktivní odpory R ext1, R ext2, R add3 a další mění formu závislosti M = f(s) a mechanické vlastnosti n 2 = f(M) motor (obr. 4.37, a). Zároveň nějaký zatěžovací moment M n zápasový skluz s 1 , s 2 , s 3 , ..., větší než skluzy s e , když motor běží na přirozené vlastnosti (když R ext = 0). Proto otáčky motoru v ustáleném stavu klesají z n E před P 1 P 2 , P 3 ,... (obr. 4.37, b). Tento způsob řízení lze použít pouze pro motory s kroužkovým kroužkem. Umožňuje plynule měnit rychlost v širokém rozsahu. Jeho nevýhody jsou: a) velké energetické ztráty v regulačním reostatu; b) nadměrně "měkké" mechanické vlastnosti motoru s vysokým odporem v okruhu rotoru. V některých případech je to druhé nepřijatelné, protože malá změna zatěžovacího momentu odpovídá významné změně rychlosti.
35 Asynchronní generátor- jedná se o asynchronní elektrický stroj (el. motor) pracující v režimu generátoru. Pomocí hnacího motoru (v našem případě větrné turbíny) se rotor asynchronního elektrického generátoru otáčí stejným směrem jako magnetické pole. V tomto případě se prokluz rotoru stane záporným, na hřídeli asynchronního stroje se objeví brzdný moment a generátor přenáší energii do sítě. Pro vzrušení elektromotorická síla jeho výstupní obvod využívá zbytkovou magnetizaci rotoru. K tomu se používají kondenzátory. Asynchronní generátory nejsou náchylné ke zkratům. Asynchronní generátor je jednodušší než synchronní (např. automobilový generátor): pokud má tento na rotoru umístěny induktory, pak rotor asynchronního generátoru vypadá jako běžný setrvačník. Takový generátor je lépe chráněn před nečistotami a vlhkostí, odolnější vůči zkrat a přetížení a výstupní napětí asynchronního generátoru má nižší stupeň nelineárního zkreslení. To umožňuje používat asynchronní generátory nejen k napájení průmyslových zařízení, která nejsou kritická pro tvar vstupního napětí, ale také k připojení elektronických zařízení. Jedná se o asynchronní elektrický generátor, který je ideálním zdrojem proudu pro zařízení s aktivní (ohmickou) zátěží: elektrické ohřívače, svařovací měniče, žárovky, elektronická zařízení, počítačová a radiotechnika. Výhody asynchronního generátoru. Mezi tyto výhody patří nízký čistý faktor (harmonický koeficient), který charakterizuje kvantitativní přítomnost vyšších harmonických ve výstupním napětí generátoru. Vyšší harmonické způsobují nerovnoměrné otáčení a zbytečné zahřívání elektromotorů. Synchronní generátory mohou mít jasný faktor až 15 % a jasný faktor asynchronního generátoru nepřesahuje 2 %. Asynchronní elektrický generátor tedy vyrábí prakticky jen užitečnou energii. Další výhodou asynchronního generátoru je, že zcela postrádá rotující vinutí a elektronické části, které jsou citlivé na vnější vlivy a jsou poměrně často náchylné k poškození. Proto asynchronní generátor málo se nosí a může sloužit velmi dlouho. Na výstupu našich generátorů je okamžitě 220/380V AC, které lze použít přímo do domácích spotřebičů (například topidel), k nabíjení baterií, k připojení na pilu a také k paralelnímu provozu s klasickou sítí. V tomto případě zaplatíte rozdíl spotřebovaný ze sítě a generovaný větrným mlýnem. Protože Vzhledem k tomu, že se napětí okamžitě přizpůsobí průmyslovým parametrům, nebudete potřebovat různé měniče (invertory), když je větrný generátor přímo připojen k vaší zátěži. Můžete se například připojit přímo k pile a za přítomnosti větru pracovat, jako byste byli jednoduše připojeni k síti 380V. Jak víte, ke zkrácení doby brzdění při zastavování výrobních strojů a mechanismů se často používají mechanické brzdy. Zkrácení doby brzdění, zejména v případě krátkého cyklu práce, vede k výraznému zvýšení produktivity strojů a mechanismů. Nevýhodou mechanických brzd je rychlé opotřebení třecích ploch, složitost a potřeba periodické regulace brzdné síly, potřeba dalšího prostoru pro umístění brzdy a její napojení na mechanismus. Všechny výše uvedené nevýhody odpadají, pokud se pro naznačené účely místo mechanické brzdy využijí vlastnosti elektromotorů pro práci v brzdných režimech, tedy aby pracovaly v podstatě jako generátor a nevyvíjely točivý moment, ale brzdný moment. U mnoha zdvihacích a přepravních strojů (jeřáby, výtahy, eskalátory atd.), kde je možný pohyb působením gravitace, je zajištěna konstantní, stálá rychlost spouštění břemen pomocí brzdného momentu elektromotoru. Stejnosměrné motory mohou pracovat ve třech režimech brzdění:
V opozičním režimu;
V režimu generátoru s výstupem energie do sítě;
V režimu dynamické brzdění.
V kterémkoli z režimů brzdění funguje elektromotor jako generátor, přeměňuje například kinetickou energii pohybujících se částí nebo potenciální energii klesající zátěže na elektrickou energii.
36 Když se motor za pohybu přepne přepnutím spínače, dojde nejprve k brzdění z dané rychlosti na nulu a poté ke zrychlení v opačném směru. Takovéto brzdění lze využít i pro brzdění při tzv opozice. Během této reverzace nebo brzdění má indukční motor s kotvou nakrátko značné proudy. Proto na základě podmínek ohřevu u těchto motorů není počet reverzů za hodinu větší než desítky. Pro omezení proudů a zvýšení točivého momentu je do obvodu fázového rotoru asynchronního motoru zaveden odpor. Uvažujme tři hlavní způsoby elektrického brzdění asynchronních motorů. Brzdění pomocí opozice, jak je uvedeno, provádí se, když je motor zapnutý. V tomto případě se magnetické pole točí opačným směrem než je směr otáčení motoru a moment motoru je brzdný - působí proti směru otáčení. Brzdění generátorem probíhá při přepínání vícerychlostního motoru za pohybu z vyšších otáček na nižší, tzn. při přepínání stroje z menšího počtu pólů na větší. V prvním okamžiku přepnutí se otáčky motoru ukáží mnohem větší než rychlost jeho pole, tj. skluz se ukáže jako záporný a stroj se přepne do režimu generátoru. K brzdění dochází při přeměně kinetické energie rotujících částí na elektrická energie, která mínus ztráty ve stroji je dána do sítě. Brzdění generátorem může být také ve výtahu při spouštění těžkého nákladu, zrychlení motoru na rychlost přesahující synchronní; pak stroj začne dodávat do sítě energii, kterou mu předává klesající zátěž. Brzdění generátorem je možné pouze při přesynchronních otáčkách. Pokud musí být motor na konci brzdění zastaven, pak je do konce brzdění nutné přejít na mechanické brzdění nebo na jiný typ elektrického brzdění (dynamické, protispínací). Fixace polohy na konci se v případě potřeby provádí pouze pomocí mechanické brzdy. V dynamické brzdění vinutí statoru motoru je odpojeno od třífázová síť a je zařazen do sítě stejnosměrných nebo jednofázových střídavých proudů. V tomto případě jsou možné různé způsoby připojení fází statorového vinutí. Statorové vinutí napájené stejnosměrným proudem vytváří stacionární magnetické pole. Stejně jako při normálním provozu motoru jeho točivé pole táhne rotor s sebou, stacionární pole při dynamickém brzdění způsobuje rychlé zastavení rotoru. Kinetická energie rotující části se přeměňují na teplo uvolněné v obvodu rotoru v důsledku proudů, které jsou v něm indukovány pevným polem statoru. Plynulost brzdění je zajištěna regulací napětí na svorkách statoru.Brzdný moment motoru s fázovým rotorem lze regulovat i reostatem v obvodu rotoru. Nevýhodou dynamického brzdění je nutnost nízkonapěťového stejnosměrného zdroje.
37 Synchronní stroj- jedná se o střídavý elektrický stroj, jehož otáčky rotoru se rovnají frekvenci rotace magnetického pole ve vzduchové mezeře. Hlavní části synchronního stroje jsou kotva a induktor. Nejběžnější je provedení, ve kterém je kotva umístěna na statoru a na rotoru je od ní tlumivka oddělená vzduchovou mezerou. Kotva je jedno nebo více střídavých vinutí. U motorů vytvářejí proudy přiváděné do kotvy točivé magnetické pole, které se spojuje s polem induktoru, a tak dochází k přeměně energie. Pole kotvy ovlivňuje pole induktoru a proto se také nazývá kotevní reakční pole. V generátorech se vytváří reakční pole kotvy střídavých proudů indukovaný ve vinutí kotvy z induktoru. Induktor se skládá z pólů - stejnosměrných elektromagnetů nebo permanentních magnetů (u mikrostrojů). Synchronní strojní induktory se dodávají ve dvou různých provedeních: vyčnívající pól nebo nevyčnívající pól. Stroj s vyčnívajícími póly se vyznačuje tím, že póly jsou výrazné a mají konstrukci podobnou pólům stejnosměrného stroje. Při implicitním pólovém provedení zapadá budicí vinutí do drážek jádra induktoru, velmi podobně jako vinutí rotorů asynchronních strojů s fázovým rotorem, jen s tím rozdílem, že mezi póly je ponechán prostor, který není naplněné vodiči (tzv velký zub). Nevýrazné konstrukce pólů se používají ve vysokorychlostních strojích ke snížení mechanického zatížení pólů. Pro snížení magnetického odporu, tedy pro zlepšení průchodu magnetického toku, se používají feromagnetická jádra rotoru a statoru. V podstatě se jedná o laminovanou elektroocelovou konstrukci (tj. sestavenou ze samostatných plechů). Elektroocel má řadu zajímavých vlastností. Zejména má vysoký obsah křemíku, aby se zvýšil jeho elektrický odpor a tím se snížily vířivé proudy.
Působení magnetického pole na cívku s proudem umožňuje jeho využití k určení modul magnetické indukce. Otočení cívky v magnetickém poli znamená, že na ni působí alespoň dvě síly. Výslednice těchto sil bude působit v bodech A a B (obr. 6.8). Točivý moment, působící na cívku, se bude rovnat součinu jedné z těchto sil F do poloměru zatáčky r. Tento bod není třeba počítat. Lze jej měřit pomocí vinuté pružiny nebo jiného citlivého zařízení pro měření mechanického točivého momentu připojeného k cívce.
Experimenty ukazují, že cívka s proudem v magnetickém poli se vždy otáčí tak, aby byl směr její normály n̅ se shoduje se směrem magnetické indukce zkoumaného pole B̅. Je zřejmé, že v tomto případě bude točivý moment nulový. Bude mít maximální hodnotu, když úhel mezi magnetickou indukcí B̅ a normální n̅ bude 90°.
Magnetickou indukci lze určit silovým působením magnetického pole na proud procházející proudem.
Beze změny síly proudu ve vodiči zkoumáme, jak závisí hodnota maximální točivý moment z parametrů cívky.
Po umístění cívky v určité vzdálenosti od vodiče s proudem změříme maximální točivý moment Mmax pro určitou hodnotu proudu v cívce já 1. Zdvojnásobíme proud v cívce. V I 2 = 2já 1 maximální mechanický moment bude roven M max 2 = 2M max 1. Totéž bude pozorováno se zvýšením síly proudu 3, 4, 5krát. Takto, maximální hodnota točivého momentu, který působí na cívku proudem, bude úměrné proudu v cívce
Mmax~já vit.
Točivý moment , působící na cívku v magnetickém poli, je úměrná síle proudu v ní.materiál z webu
Pokud tuto cívku nahradíme jinou, s větší či menší plochou S vit, zaznamenáme odpovídající zvýšení nebo snížení hodnoty maximálního točivého momentu. Takto,
maximální točivý moment , která působí na cívku v magnetickém poli, je úměrná její ploše:
Mmax~S vit.
Spojením výsledků obou fází výzkumu dostaneme
Mmax~já vit.S vit.
Na této stránce jsou materiály k tématům:
Napětí U 1 aplikované na fázi vinutí statoru je vyváženo hlavním EMF E 1, únikovým EMF a úbytkem napětí na aktivním odporu vinutí statoru:
Ve vinutí rotoru bude podobná rovnice vypadat takto:
Ale protože je vinutí rotoru uzavřeno, napětí U 2 \u003d 0, a pokud vezmeme v úvahu také E 2s \u003d SE 2 a x 2s \u003d Sx 2, pak lze rovnici přepsat jako:
![]()
Rovnice pro proudy indukčního motoru opakuje podobnou rovnici pro transformátor:
28 Točivý moment asynchronního motoru
Točivý moment v indukčním motoru vzniká interakcí rotorového proudu s magnetickým polem stroje. Točivý moment lze matematicky vyjádřit jako elektromagnetický výkon stroje:
kde w 1 = 2 pn 1 /60 - úhlová frekvence otáčení pole. ve svém pořadí, n 1 =f 1 60/R, pak
![]()
Nahraďte ve vzorci M 1 výraz REm=Pe2/S a po dělení 9,81 dostaneme:
![]()
Rovnice točivého momentu indukčního motoru
Z toho vyplývá, že moment motoru je úměrný elektrickým ztrátám v rotoru. V posledním vzorci dosaďte aktuální hodnotu já 2 ’ :
dostaneme rovnici pro točivý moment indukčního motoru:
kde U 1 - fázové napětí vinutí statoru.
29 .Mechanická charakteristika motoru se nazývá závislost otáček rotoru na kroutícím momentu na hřídeli n = f (M2). Protože je volnoběžný moment při zatížení malý, pak M2 ≈ M a mechanická charakteristika je reprezentována závislostí n = f (M). Pokud vezmeme v úvahu vztah s = (n1 - n) / n1, pak lze mechanickou charakteristiku získat uvedením její grafické závislosti v souřadnicích n a M (obr. 1).
Rýže. 1. Mechanická charakteristika asynchronního motoru
Přirozená mechanická charakteristika indukčního motoru odpovídá hlavnímu (pasovému) obvodu jeho zařazení a jmenovitým parametrům napájecího napětí. Umělé vlastnosti jsou získány, pokud jsou zahrnuty jakékoli další prvky: rezistory, reaktory, kondenzátory. Když je motor napájen jiným než jmenovitým napětím, charakteristiky se také liší od přirozené mechanické charakteristiky.
Mechanické charakteristiky jsou velmi pohodlným a užitečným nástrojem při analýze statických a dynamických režimů elektrického pohonu.
30 Mechanická charakteristika a samoregulace motoru. Graf spojující mechanické veličiny - otáčky a točivý moment - se nazývá mechanická charakteristika asynchronního motoru (obr. 7) n = ƒ(M). Samoregulace asynchronního motoru je následující. Nechte motor v nějakém režimu stabilně pracovat, vyvíjet otáčky n1 a točivý moment M1. Při rovnoměrném otáčení je tento moment roven brzdnému momentu M t1, tj. M1=M t 1, n1= konstituce. Zvýšení brzdného momentu na M2 způsobí snížení rychlosti stroje, protože brzdný moment bude větší než moment. S poklesem rychlosti se zvyšuje skluz, což zase způsobuje zvýšení EMF a proudu v rotoru. To zvyšuje točivý moment motoru. Tento proces končí, když se točivý moment M2 vyvinutý motorem rovná M t 2. V tomto případě je rychlost otáčení nastavena nižší než n1. Nazývá se vlastnost automatické rovnováhy mezi brzděním a kroutícím momentem samoregulace.
Na laboratorním stojanu je motor zatížen elektrickou brzdou, tvořenou elektromagnetem, v jehož mezeře se otáčí kotouč nasazený na hřídeli motoru. Změnou napětí napájejícího cívku elektromagnetu rukojetí autotransformátoru je možné změnit brzdnou sílu, jejíž moment je: M TORM \u003d F r (N m)
kde F je síla (síla) působící na obvod řemenice, (N);
r - poloměr řemenice, rovný 0,18 m. Užitný výkon na hřídeli motoru:
kde n- otáčky motoru, ot./min.
kde ƒ - frekvence sítě (rovná se 50 Hz),
R- počet párů pólů vinutí statoru (rovný 2).
n 1 - synchronní rychlost rotujícího magnetického pole.
Otáčky motoru se zjišťují pomocí otáčkoměru. Skluz se vypočítá podle vzorce:
31 Provozní vlastnosti nazývají závislosti výkonu spotřebovaného motorem, spotřebovaného proudu I, účiníku, otáček motoru, účinnosti a točivého momentu M na užitečném výkonu motoru vydávaném na hřídeli. Výkonové charakteristiky určují základní výkonové vlastnosti indukčního motoru. Výkonové charakteristiky asynchronního motoru se středním výkonem jsou uvedeny na Obr. 8.8. Jejich chování je vysvětleno následovně. Při nízké zátěži může být proud motoru I (proud naprázdno) mezi 20 % a 70 % jmenovitého proudu. S rostoucí zátěží se zvyšuje proud v obvodu rotoru, což vede k téměř úměrnému zvýšení proudu já v obvodu statoru.
Obr.8.8 Moment motoru () je také téměř úměrná zatížení, ale při vysokém zatížení je linearita grafu poněkud narušena snížením otáček motoru. Výkonová charakteristika vyjadřuje vztah mezi výkonem vyvinutým motorem a fázovým posunem mezi statorovým proudem a napětím. Asynchronní motor, stejně jako transformátor, spotřebovává proud I ze sítě, který je výrazně mimo fázi s použitým napětím. Například v klidovém režimu. S rostoucím zatížením hřídele motoru se zvyšují a zvyšují aktivní složky rotoru a statorových proudů . Maximální hodnoty je dosaženo při .
S dalším zvýšením se hodnota poněkud sníží. To je způsobeno zvýšením skluzu s, což způsobí zvýšení reaktance vinutí rotoru a v důsledku toho fázový posun . Z zvyšuje a zvyšuje, tzn. se sníží.
Chování provozní charakteristiky je vysvětleno následovně. Hodnota účinnosti je dána poměrem užitečného výkonu k výkonu odebíranému ze sítě.
Hodnota se nazývá ztráta výkonu. Kromě ztrát v oceli statoru a rotoru v důsledku reverzace magnetizace a vířivých proudů, které lze spolu s mechanickými ztrátami považovat za konstantní, dochází u asynchronního motoru ke ztrátám v mědi. ,
těch. ve vinutí statoru a rotoru, které jsou úměrné druhé mocnině protékajícího proudu a tedy závislé na zatížení. Při volnoběhu, stejně jako u transformátoru, převažují ztráty v oceli, protože a je roven proudu naprázdno, který je malý. Při malém zatížení hřídele zůstávají ztráty v mědi stále malé, a proto účinnost určená vzorcem ![]() (8.5)
(8.5)
zpočátku prudce narůstá. Když se pevné ztráty rovna ztrátám závislým na zatížení , účinnost dosáhne své maximální hodnoty. S dalším nárůstem zátěže výrazně rostou proměnlivé výkonové ztráty, v důsledku čehož účinnost znatelně klesá. Povaha závislosti ) lze vysvětlit ze vztahu . Pokud účinnost byl konstantní, pak by existoval lineární vztah mezi a. Ale od účinnosti závisí na a tato závislost zpočátku prudce narůstá a s dalším zvyšováním zátěže se mírně mění, pak křivka ) nejprve se zvyšuje pomalu a poté prudce.
32 V každém elektrickém obvodu musí být součet výkonů všech zdrojů elektrické energie roven součtu výkonů všech přijímačů a pomocných prvků. Po předchozím získání výkonových výrazů je možné napsat v obecné podobě rovnici výkonové bilance pro jakýkoli elektrický obvod:
Σ E → já → + Σ U ← já → = Σ E ← já → + Σ U → já → + Σ já 2 r.
Rovnici (1.35) lze napsat jak pro skutečné EMF směry, napětí a proudy, tak pro případ, kdy některé z nich jsou libovolně zvolené kladné směry. V prvním případě budou všechny členy v něm kladné a odpovídající prvky obvodu budou ve skutečnosti zdroje nebo přijímače elektrické energie. Pokud jsou na druhou stranu některé termíny psány s ohledem na libovolně zvolené pozitivní směry, je třeba odpovídající prvky považovat za zamýšlené zdroje a přijímače. V důsledku výpočtu nebo analýzy se některé z nich mohou ukázat jako negativní. To bude znamenat, že některé z předpokládaných zdrojů jsou ve skutečnosti jímky a některé předpokládané výlevky jsou zdrojem.
33 Spouštění asynchronního motoru je provázen přechodovým dějem stroje spojeným s přechodem rotoru z klidového stavu do stavu rovnoměrného otáčení, při kterém kroutící moment motoru vyrovnává moment odporových sil na hřídeli stroje. Při spouštění asynchronního motoru dochází ke zvýšené spotřebě elektrické energie z napájecí sítě, která se vynakládá nejen na překonání brzdného momentu působícího na hřídel a pokrytí ztrát v samotném asynchronním motoru, ale také na sdělování určité kinetické energie. na pohyblivé části výrobní jednotky. Proto musí asynchronní motor při spouštění vyvinout zvýšený točivý moment. Pro asynchronní motor s fázovým rotorem počáteční rozběhový moment, odpovídající skluzu sp = 1, závisí na činných odporech nastavitelných odporů zavedených do obvodu rotoru.
Rýže. 1. Spouštění třífázového asynchronního motoru s fázovým rotorem: a - grafy závislosti točivého momentu motoru s fázovým rotorem na skluzu při různých činných odporech rezistorů v obvodu rotoru, b - schéma zařazení odporů a zrychlovacích uzavíracích kontaktů v obvodu rotoru. Takže při sepnutých akceleračních kontaktech U1, U2, tj. při spouštění asynchronního motoru se zkratovanými kontaktními kroužky, je počáteční rozběhový moment Mp1 = (0,5 -1,0) Mnom a počáteční rozběhový proud Ip = (4,5 - 7) Inom a více. Malý počáteční rozběhový moment asynchronního motoru s fázovým rotorem nemusí stačit k pohonu výrobní jednotky a následnému urychlení a výrazný rozběhový proud způsobí zvýšené zahřívání vinutí motoru, což omezuje frekvenci jeho spínání, a v sítích s nízkým výkonem vede k nežádoucímu provozu jiných přijímačů dočasný pokles napětí. Tyto okolnosti mohou být důvodem, který vylučuje použití asynchronních motorů s fázovým rotorem s velkým rozběhovým proudem pro pohon pracovních mechanismů. Zavedení nastavitelných odporů, nazývaných spouštěcí odpory, do obvodu rotoru motoru nejen snižuje počáteční rozběhový proud, ale současně zvyšuje počáteční rozběhový moment, který může dosáhnout maximálního momentu Mmax (obr. 1, a, křivka 3 ), pokud je kritický skluz motoru s fázovým rotorem scr \u003d (R2 "+ Rd") / (X1 + X2") \u003d 1, kde Rd" je aktivní odpor rezistoru umístěného ve fázi vinutí rotoru motoru, redukované na fázi vinutí statoru. Další zvýšení aktivního odporu rozběhového odporu je nepraktické, protože vede k zeslabení počátečního rozběhového momentu a výstupu bodu maximálního momentu do oblasti skluzu s > 1, což vylučuje možnost zrychlení rotoru. Požadovaný činný odpor rezistorů pro spouštění motoru s fázovým rotorem je určen na základě požadavků na spouštění, což může být snadné, když Mp = (0,1 - 0,4) Mnom, normální, pokud Mp - (0,5 - 0,75) Mnom, a těžké při Mp ≥ Mnom. Pro udržení dostatečně velkého krouticího momentu motorem s fázovým rotorem při akceleraci výrobní jednotky, aby se zkrátila doba přechodného procesu a snížilo se zahřívání motoru, je nutné postupně snižovat aktivní odpor startovací odpory. Přípustná změna točivého momentu při zrychlení M(t) je určena elektrickými a mechanickými podmínkami, které omezují mez špičkového točivého momentu M > 0,85 Mmax, spínací moment M2 > > Ms (obr. 2), stejně jako zrychlení.
Rýže. 2. Rozběhová charakteristika třífázového asynchronního motoru s fázovým rotorem. Spínání rozběhových odporů je zajištěno postupným spínáním zrychlovacích stykačů Y1, resp. Y2 v časech t1, t2 počítaných od okamžiku nastartování motoru, kdy se při zrychlování moment M rovná spínacímu momentu M2. Díky tomu jsou během celého rozběhu všechny špičkové momenty stejné a všechny spínací momenty jsou si navzájem rovné. Protože točivý moment a proud asynchronního motoru s fázovým rotorem spolu souvisí, je možné nastavit limit špičkového proudu I1 \u003d (1,5 - 2,5) Inom a spínací proud I2 při zrychlení rotoru, což by mělo zajistit spínací moment M2\u003e Mc. Odpojení asynchronních motorů s fázovým rotorem od napájecí sítě se provádí vždy při zkratovaném obvodu rotoru, aby nedocházelo k přepětí ve fázích vinutí statoru, které může 3-4x překročit jmenovité napětí těchto fází. pokud je obvod rotoru v okamžiku vypnutí motoru otevřený.
34 Regulace frekvence. Tento způsob regulace otáček umožňuje použití nejspolehlivějších a nejlevnějších asynchronních motorů s rotorem nakrátko. Pro změnu frekvence napájecího napětí je však zapotřebí zdroj elektrického proudu s proměnnou frekvencí. Jako poslední se používají buď synchronní generátory s proměnnou rychlostí, nebo frekvenční měniče - elektrické nebo statické, vyrobené na řízených polovodičových ventilech (tyristorech). V současné době mají frekvenční měniče poměrně složitý obvod a relativně vysoké náklady. Rychlý rozvoj technologie výkonových polovodičů nám však umožňuje doufat v další zdokonalování frekvenčních měničů, což otevírá vyhlídky na široké využití frekvenční regulace. Podrobný popis regulačních zákonů pro regulaci frekvence a analýza činnosti asynchronního motoru při napájení z frekvenčního měniče jsou uvedeny v § 4.13 a 4.14. Regulace změnou počtu pólů. Tato regulace umožňuje skokovou změnu rychlosti. Na Obr. 4.35 ukazuje nejjednodušší obvod (pro jednu fázi), který umožňuje dvakrát změnit počet pólů vinutí statoru. K tomu je každá fáze statorového vinutí rozdělena na dvě části, které se přepínají ze sériového zapojení na paralelní. Z obrázku je to vidět když jsou cívky 1-2 a 3-4 zapnuty ve dvou paralelních větvích, počet pólů se sníží na polovinu a v důsledku toho se frekvence rotace magnetického pole zdvojnásobí. Při spínání se počet sériově zapojených závitů v každé fázi sníží na polovinu, ale protože se rychlost otáčení zdvojnásobí, EMF indukovaný ve fázi zůstává nezměněn. Proto lze motor při obou rychlostech připojit k síti se stejným napětím. Aby nedošlo k přepnutí vinutí rotoru, provádí se druhé zkratovaný. Pokud potřebujete mít tři nebo čtyři rychlosti, pak se na stator umístí další vinutí, jehož spínáním získáte další dvě frekvence. Nazývají se indukční motory s přepínáním pólů vícerychlostní. Regulace zapojením reostatu do okruhu rotoru. Když jsou v obvodu rotoru zahrnuty další aktivní odpory R ext1, R ext2, R add3 a další mění formu závislosti M = f(s) a mechanické vlastnosti n 2 = f(M) motor (obr. 4.37, a). Zároveň nějaký zatěžovací moment M n zápasový skluz s 1 , s 2 , s 3 , ..., větší než skluzy s e , když motor běží na přirozené vlastnosti (když R ext = 0). Proto otáčky motoru v ustáleném stavu klesají z n E před P 1 P 2 , P 3 ,... (obr. 4.37, b). Tento způsob řízení lze použít pouze pro motory s kroužkovým kroužkem. Umožňuje plynule měnit rychlost v širokém rozsahu. Jeho nevýhody jsou: a) velké energetické ztráty v regulačním reostatu; b) nadměrně "měkké" mechanické vlastnosti motoru s vysokým odporem v okruhu rotoru. V některých případech je to druhé nepřijatelné, protože malá změna zatěžovacího momentu odpovídá významné změně rychlosti.
35 Asynchronní generátor- jedná se o asynchronní elektrický stroj (el. motor) pracující v režimu generátoru. Pomocí hnacího motoru (v našem případě větrné turbíny) se rotor asynchronního elektrického generátoru otáčí stejným směrem jako magnetické pole. V tomto případě se prokluz rotoru stane záporným, na hřídeli asynchronního stroje se objeví brzdný moment a generátor přenáší energii do sítě. K vybuzení elektromotorické síly v jeho výstupním obvodu se využívá zbytková magnetizace rotoru. K tomu se používají kondenzátory. Asynchronní generátory nejsou náchylné ke zkratům. Asynchronní generátor je jednodušší než synchronní (například automobilový generátor): pokud má tento na rotoru induktory, pak rotor asynchronního generátoru vypadá jako běžný setrvačník. Takový generátor je lépe chráněn před nečistotami a vlhkostí, odolnější proti zkratu a přetížení a výstupní napětí asynchronního generátoru má nižší stupeň nelineárního zkreslení. To umožňuje používat asynchronní generátory nejen pro napájení průmyslových zařízení, která nejsou kritická pro tvar vstupního napětí, ale také pro připojení elektronických zařízení. Jedná se o asynchronní elektrický generátor, který je ideálním zdrojem proudu pro zařízení s aktivní (ohmickou) zátěží: elektrické ohřívače, svařovací měniče, žárovky, elektronická zařízení, počítačová a rádiová zařízení. Výhody asynchronního generátoru . Mezi tyto výhody patří nízký čistý faktor (harmonický koeficient), který charakterizuje kvantitativní přítomnost vyšších harmonických ve výstupním napětí generátoru. Vyšší harmonické způsobují nerovnoměrné otáčení a zbytečné zahřívání elektromotorů. Synchronní generátory mohou mít jasný faktor až 15 % a jasný faktor asynchronního generátoru nepřesahuje 2 %. Asynchronní elektrický generátor tedy vyrábí prakticky jen užitečnou energii. Další výhodou asynchronního generátoru je, že zcela postrádá rotující vinutí a elektronické části, které jsou citlivé na vnější vlivy a jsou poměrně často náchylné k poškození. Asynchronní generátor proto nepodléhá opotřebení a může sloužit velmi dlouhou dobu. Na výstupu našich generátorů je okamžitě 220/380V AC, které lze použít přímo do domácích spotřebičů (například topidel), k nabíjení baterií, k připojení na pilu a také k paralelnímu provozu s klasickou sítí. V tomto případě zaplatíte rozdíl spotřebovaný ze sítě a generovaný větrným mlýnem. Protože Vzhledem k tomu, že se napětí okamžitě přizpůsobí průmyslovým parametrům, nebudete potřebovat různé měniče (invertory), když je větrný generátor přímo připojen k vaší zátěži. Můžete se například připojit přímo k pile a za přítomnosti větru pracovat, jako byste byli jednoduše připojeni k síti 380V. Jak víte, ke zkrácení doby brzdění při zastavování výrobních strojů a mechanismů se často používají mechanické brzdy. Zkrácení doby brzdění, zejména v případě krátkého cyklu práce, vede k výraznému zvýšení produktivity strojů a mechanismů. Nevýhodou mechanických brzd je rychlé opotřebení třecích ploch, složitost a potřeba periodické regulace brzdné síly, potřeba dalšího prostoru pro umístění brzdy a její napojení na mechanismus. Všechny výše uvedené nevýhody odpadají, pokud se pro naznačené účely místo mechanické brzdy využijí vlastnosti elektromotorů pro práci v brzdných režimech, tedy aby pracovaly v podstatě jako generátor a nevyvíjely točivý moment, ale brzdný moment. U mnoha zdvihacích a přepravních strojů (jeřáby, výtahy, eskalátory atd.), kde je možný pohyb působením gravitace, je zajištěna konstantní, stálá rychlost spouštění břemen pomocí brzdného momentu elektromotoru. Stejnosměrné motory mohou pracovat ve třech režimech brzdění:
V opozičním režimu;
V režimu generátoru s výstupem energie do sítě;
V režimu dynamického brzdění.
V kterémkoli z režimů brzdění funguje elektromotor jako generátor, přeměňuje například kinetickou energii pohybujících se částí nebo potenciální energii klesající zátěže na elektrickou energii.
36 Když se motor za pohybu přepne přepnutím spínače, dojde nejprve k brzdění z dané rychlosti na nulu a poté ke zrychlení v opačném směru. Takovéto brzdění lze využít i pro brzdění při tzv opozice. Během této reverzace nebo brzdění má indukční motor s kotvou nakrátko značné proudy. Proto na základě podmínek ohřevu u těchto motorů není počet reverzů za hodinu větší než desítky. Pro omezení proudů a zvýšení točivého momentu je do obvodu fázového rotoru asynchronního motoru zaveden odpor. Uvažujme tři hlavní způsoby elektrického brzdění asynchronních motorů. Brzdění pomocí opozice, jak je uvedeno, provádí se, když je motor zapnutý. V tomto případě se magnetické pole točí opačným směrem než je směr otáčení motoru a moment motoru je brzdný - působí proti směru otáčení. Brzdění generátorem probíhá při přepínání vícerychlostního motoru za pohybu z vyšších otáček na nižší, tzn. při přepínání stroje z menšího počtu pólů na větší. V prvním okamžiku přepnutí se otáčky motoru ukáží mnohem větší než rychlost jeho pole, tj. skluz se ukáže jako záporný a stroj se přepne do režimu generátoru. K brzdění dochází při přeměně kinetické energie rotujících částí na elektrickou energii, která je po odečtení ztrát ve stroji předána síti. Brzdění generátorem může být také ve výtahu při spouštění těžkého nákladu, zrychlení motoru na rychlost přesahující synchronní; pak stroj začne dodávat do sítě energii, kterou mu předává klesající zátěž. Brzdění generátorem je možné pouze při přesynchronních otáčkách. Pokud musí být motor na konci brzdění zastaven, pak je do konce brzdění nutné přejít na mechanické brzdění nebo na jiný typ elektrického brzdění (dynamické, protispínací). Fixace polohy na konci se v případě potřeby provádí pouze pomocí mechanické brzdy. V dynamické brzdění vinutí statoru motoru je odpojeno od třífázové sítě a připojeno ke stejnosměrné nebo jednofázové síti AC. V tomto případě jsou možné různé způsoby připojení fází statorového vinutí. Statorové vinutí napájené stejnosměrným proudem vytváří stacionární magnetické pole. Stejně jako při normálním provozu motoru jeho točivé pole táhne rotor s sebou, stacionární pole při dynamickém brzdění způsobuje rychlé zastavení rotoru. Kinetická energie rotujících částí se přeměňuje na teplo uvolněné v obvodu rotoru v důsledku proudů, které jsou v něm indukovány pevným polem statoru. Plynulost brzdění je zajištěna regulací napětí na svorkách statoru.Brzdný moment motoru s fázovým rotorem lze regulovat i reostatem v obvodu rotoru. Nevýhodou dynamického brzdění je nutnost nízkonapěťového stejnosměrného zdroje.
37 Synchronní stroj- jedná se o střídavý elektrický stroj, jehož otáčky rotoru se rovnají frekvenci rotace magnetického pole ve vzduchové mezeře. Hlavní části synchronního stroje jsou kotva a induktor. Nejběžnější je provedení, ve kterém je kotva umístěna na statoru a na rotoru je od ní tlumivka oddělená vzduchovou mezerou. Kotva je jedno nebo více střídavých vinutí. U motorů vytvářejí proudy přiváděné do kotvy točivé magnetické pole, které se spojuje s polem induktoru, a tak dochází k přeměně energie. Pole kotvy ovlivňuje pole induktoru a proto se také nazývá kotevní reakční pole. U generátorů je reakční pole kotvy vytvářeno střídavými proudy indukovanými ve vinutí kotvy z induktoru. Induktor se skládá z pólů - stejnosměrných elektromagnetů nebo permanentních magnetů (u mikrostrojů). Synchronní strojní induktory se dodávají ve dvou různých provedeních: vyčnívající pól nebo nevyčnívající pól. Stroj s vyčnívajícími póly se vyznačuje tím, že póly jsou výrazné a mají konstrukci podobnou pólům stejnosměrného stroje. Při implicitním pólovém provedení zapadá budicí vinutí do drážek jádra induktoru, velmi podobně jako vinutí rotorů asynchronních strojů s fázovým rotorem, jen s tím rozdílem, že mezi póly je ponechán prostor, který není naplněné vodiči (tzv velký zub). Nevýrazné konstrukce pólů se používají ve vysokorychlostních strojích ke snížení mechanického zatížení pólů. Pro snížení magnetického odporu, tedy pro zlepšení průchodu magnetického toku, se používají feromagnetická jádra rotoru a statoru. V podstatě se jedná o laminovanou elektroocelovou konstrukci (tj. sestavenou ze samostatných plechů). Elektroocel má řadu zajímavých vlastností. Zejména má vysoký obsah křemíku, aby se zvýšil jeho elektrický odpor a tím se snížily vířivé proudy.
Doporučujeme číst
 Psychologické charakteristiky dětí v adolescenci
Psychologické charakteristiky dětí v adolescenci Přeřazení dítěte na jinou školu – postup a potřebné dokumenty Zda přeřadit dítě na jinou školu
Přeřazení dítěte na jinou školu – postup a potřebné dokumenty Zda přeřadit dítě na jinou školu, diagnostika, léčba Léčba urogenitálních chlamydií") Chlamydie urogenitální - popis, příčiny, příznaky (příznaky), diagnostika, léčba Léčba urogenitálních chlamydií
Chlamydie urogenitální - popis, příčiny, příznaky (příznaky), diagnostika, léčba Léčba urogenitálních chlamydií Výhody a význam hydroaminokyseliny threoninu pro lidský organismus L threonin co
Výhody a význam hydroaminokyseliny threoninu pro lidský organismus L threonin co

