Jsou určeny především způsobem zapnutí budícího vinutí. V závislosti na tom se rozlišují elektromotory:
1. s nezávislou stimulací: budicí vinutí je napájeno z externího zdroje stejnosměrný proud(budič nebo usměrňovač),
2. S paralelní buzení : budicí vinutí je zapojeno paralelně s vinutím kotvy,
3.: budicí vinutí je zapojeno do série s vinutím kotvy,
4. se smíšeným vzrušením: má dvě budicí vinutí, jedno je zapojeno paralelně s vinutím kotvy a druhé s ním sériově.
Všechny tyto elektromotory mají stejné zařízení a liší se pouze provedením budícího vinutí. Budicí vinutí těchto elektromotorů se provádí stejně jako u.
elektrický motor stejnosměrný proud s nezávislou stimulací
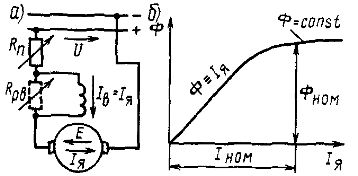
U tohoto elektromotoru (obr. 1, a) je vinutí kotvy připojeno k hlavnímu stejnosměrnému zdroji (stejnosměrná síť, generátor nebo usměrňovač) s napětím U a budicí vinutí je připojeno k pomocnému zdroji napětí UB. Řídicí reostat Rrv je součástí obvodu budícího vinutí a spouštěcí reostat Rn je součástí obvodu vinutí kotvy.
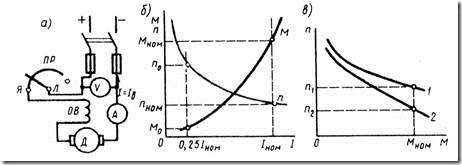
Nastavovací reostat slouží k regulaci rychlosti otáčení kotvy motoru a spouštěcí reostat slouží k omezení proudu ve vinutí kotvy při rozběhu. charakteristický rys elektromotoru je, že jeho budicí proud Iv nezávisí na proudu Ii ve vinutí kotvy (zatěžovací proud). Pokud tedy zanedbáme demagnetizační účinek reakce kotvy, můžeme přibližně předpokládat, že tok motoru Ф nezávisí na zatížení. Závislosti elektromagnetického momentu M a rychlosti otáčení n na proudu Il budou lineární (obr. 2, a). V důsledku toho bude i mechanická charakteristika motoru lineární - závislost n (M) (obr. 2, b).
Při nepřítomnosti reostatu s odporem Rn v obvodu kotvy budou rychlostní a mechanické charakteristiky tuhé, tj. s malým úhlem sklonu k vodorovné ose, protože pokles napětí IаΣRя ve vinutí stroje zahrnutých v obvodu kotvy při jmenovité zatížení je pouze 3-5 % Unom. Tyto charakteristiky (přímky 1 na obr. 2, a a b) se nazývají přirozené. Když je do obvodu kotvy zahrnut reostat s odporem Rn, stoupá sklon těchto charakteristik, v důsledku čehož je možné získat rodinu charakteristik reostatu 2, 3 a 4, odpovídající různé významy Rn1, Rn2 a Rn3.
Rýže. 1. Schémata elektromotorů stejnosměrný proud s nezávislým (a) a paralelním (b) buzením
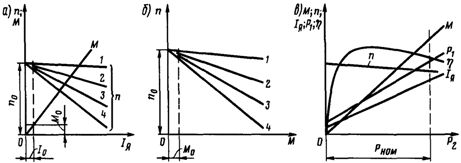
Rýže. 2. Charakteristika elektromotorů stejnosměrný proud s nezávislým a paralelním buzením: a - vysokootáčkový a kroutící, b - mechanický, c - pracovní větší odpor Rn, čím větší úhel sklonu má reostatická charakteristika, tj. tím je měkčí.
Nastavovací reostat Rpv umožňuje měnit budicí proud motoru Ib a jeho magnetický tok Ф. V tomto případě se změní i otáčky n.
V obvodu budícího vinutí nejsou instalovány žádné spínače a pojistky, protože při přerušení tohoto obvodu se magnetický tok elektromotoru prudce sníží (v něm zůstává pouze tok zbytkového magnetismu) a dojde k nouzovému režimu. Pokud elektromotor běží na volnoběh nebo s malým zatížením hřídele, pak se otáčky prudce zvyšují (motor jede divoce). V tomto případě se proud ve vinutí kotvy Ia velmi zvýší a může dojít k plošnému požáru. Aby se tomu zabránilo, musí ochrana odpojit motor od zdroje napájení.
Prudké zvýšení rychlosti otáčení při přerušení obvodu budícího vinutí se vysvětluje tím, že v tomto případě magnetický tok Ф prudce klesá (na hodnotu Fostova toku ze zbytkového magnetismu) a e. d.s. E a aktuální Iya se zvyšuje. A protože přiložené napětí U zůstává nezměněno, rychlost otáčení n se bude zvyšovat až do e. d.s. E nedosáhne hodnoty přibližně rovné U (což je nutné pro rovnovážný stav elektrický obvod kotvy, u kterých E= U - IаΣRя.
Když se zatížení hřídele blíží jmenovité hodnotě, elektromotor se zastaví v případě přerušení budícího obvodu, protože elektromagnetický moment, který může motor vyvinout s výrazným poklesem magnetického toku, klesá a stává se menším než zatěžovací moment na hřídeli. V tomto případě se prudce zvýší i proud Ia a stroj musí být odpojen od zdroje energie.
Je třeba poznamenat, že otáčky n0 odpovídají ideálnímu volnoběhu, kdy motor nespotřebovává elektrickou energii ze sítě a jeho elektromagnetický moment je nulový. V reálných podmínkách v režimu naprázdno motor spotřebovává volnoběh I0 ze sítě, který je nutné kompenzovat vnitřní ztráty výkon a vyvine určitý moment M0 potřebný k překonání třecích sil ve stroji. Proto jsou ve skutečnosti otáčky naprázdno menší než n0.
Závislost rychlosti otáčení n a elektromagnetického momentu M na výkonu P2 (obr. 2, c) na hřídeli motoru, jak vyplývá z uvažovaných vztahů, je lineární. Téměř lineární jsou také závislosti proudu Iya vinutím kotvy a výkonu P1 na P2. Proud Ia a výkon P1 při P2 = 0 jsou proud naprázdno I0 a výkon P0 spotřebovaný při chodu naprázdno. Křivka účinnosti má charakter společný pro všechny elektrické stroje.
elektrický motor stejnosměrný proud s paralelním buzením
U tohoto elektromotoru (viz obr. 1, b) jsou budicí a kotvové vinutí napájeny ze stejného zdroje elektrické energie s napětím U. V obvodu budícího vinutí je zařazen regulační reostat Rpv a součástí je i spouštěcí reostat Rp v obvodu vinutí kotvy.
V uvažovaném elektromotoru v podstatě oddělená jídla obvody kotvy a budícího vinutí, v důsledku čehož budicí proud Iv nezávisí na proudu vinutí kotvy Iv. Paralelně buzený motor bude mít proto stejné charakteristiky jako nezávisle buzený motor. Paralelně buzený motor však funguje správně pouze tehdy, je-li napájen stejnosměrným zdrojem konstantního napětí.
Při napájení elektromotoru ze zdroje s proměnným napětím (generátor nebo řízený usměrňovač) pokles napájecího napětí U způsobí odpovídající pokles budícího proudu Iv a magnetického toku F, což vede ke zvětšení vinutí kotvy. proud Ia. To omezuje možnost řídit otáčky kotvy změnou napájecího napětí U. Elektromotory určené pro napájení generátorem nebo řízeným usměrňovačem proto musí být buzeny nezávisle.
elektrický motor stejnosměrný proud se sekvenčním buzením
Pro omezení proudu při rozběhu je v obvodu vinutí kotvy zařazen rozběhový reostat Rp (obr. 3, a) a pro regulaci otáček lze paralelně s budicím vinutím připojit nastavovací reostat Rrv.
Rýže. 3. Schematické schéma elektromotoru stejnosměrný proud se sériovým buzením (a) a závislost jeho magnetického toku Ф na proudu Iа ve vinutí kotvy (b)
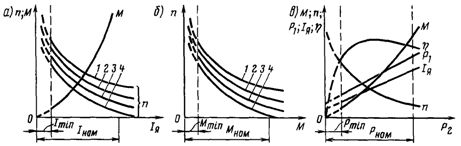
Rýže. 4. Charakteristika elektromotoru stejnosměrný proud se sekvenčním buzením: a - vysokootáčkový a kroutící, b - mechanický, c - dělnický.
Charakteristickým znakem tohoto elektromotoru je, že jeho budicí proud Iv je roven nebo úměrný (při zapnutém reostatu Rpv) proudu vinutí kotvy Ia, proto magnetický tok Ф závisí na zatížení motoru (obr. 3, b ).
S proudem vinutí kotvy I, menší (0,8-0,9) jmenovitý proud Inom není magnetický systém stroje nasycen a lze předpokládat, že magnetický tok Ф se mění přímo úměrně k proudu Iа. Proto bude rychlostní charakteristika elektromotoru měkká - se zvýšením proudu se I-tá frekvence otáčení n prudce sníží (obr. 4, a). Ke snížení rychlosti otáčení n dochází v důsledku zvýšení poklesu napětí IяΣRя. v vnitřní odpor Rya. obvody vinutí kotvy, stejně jako v důsledku zvýšení magnetického toku F.
Elektromagnetický moment M se zvýšením proudu Ia prudce vzroste, protože v tomto případě se také zvýší magnetický tok F, tj. moment M bude úměrný proudu Ia. Proto při proudu Ia menším než (0,8 N-0,9) Inom má rychlostní charakteristika tvar hyperboly a momentová charakteristika tvar paraboly.
Při proudech Il > Inom jsou závislosti M a n na Il lineární, protože v tomto režimu bude magnetický obvod nasycen a magnetický tok Ф se při změně proudu Il nezmění.
Mechanickou charakteristiku, tj. závislost n na M (obr. 4, b), lze postavit na základě závislostí n a M na Ib. Kromě přirozené charakteristiky 1 je možné získat rodinu charakteristik reostatu 2, 3 a 4 zařazením reostatu s odporem Rp do obvodu vinutí kotvy. Tyto charakteristiky odpovídají různým hodnotám Rn1, Rn2 a Rn3, zatímco čím větší Rn, tím nižší charakteristika.
Mechanická charakteristika uvažovaného motoru je měkká a má hyperbolický charakter. Při nízkém zatížení magnetický tok Ф velmi klesá, otáčky n prudce rostou a mohou překročit maximální přípustnou hodnotu (motor vyběhne z převodového stupně). Takové motory proto nelze použít k pohonu mechanismů pracujících v klidovém režimu a při nízké zátěži (různé obráběcí stroje, dopravníky apod.).
Obvykle minimální přípustné zatížení pro motory velkého a středního výkonu je (0,2 .... 0,25) Inom. Aby motor neběžel bez zatížení, je napevno spojen s hnacím mechanismem (ozubená nebo slepá spojka), použití řemenového pohonu nebo třecí spojky je nepřípustné.
Navzdory této nevýhodě jsou sériově buzené motory široce používány, zejména tam, kde dochází k velkým změnám zátěžového momentu a obtížným startovacím podmínkám: ve všech trakčních pohonech (elektrické lokomotivy, dieselové lokomotivy, elektrické vlaky, elektrické vozy, elektrické vysokozdvižné vozíky atd.), i v pohonech zvedacích mechanismů (jeřáby, výtahy atd.).
Vysvětluje se to tím, že při měkké charakteristice vede zvýšení zatěžovacího momentu k menšímu nárůstu proudu a příkonu než u motorů s nezávislým a paralelním buzením, proto motory se sériovým buzením lépe snášejí přetížení. Kromě toho mají tyto motory velký rozběhový moment než motory s paralelním a nezávislým buzením, protože se zvýšením proudu vinutím kotvy při rozběhu se odpovídajícím způsobem zvyšuje i magnetický tok.
Připustíme-li například, že krátkodobý rozběhový proud může být 2násobek jmenovitého pracovního proudu stroje a zanedbáme vliv saturace, reakce kotvy a úbytek napětí v obvodu jeho vinutí, pak v u motoru se sériovým buzením bude rozběhový moment 4krát větší než jmenovitý (v proudovém i magnetickém toku se zvýší 2krát) a u motorů s nezávislým a paralelním buzením - pouze 2krát více.
Ve skutečnosti se v důsledku nasycení magnetického obvodu magnetický tok nezvyšuje úměrně proudu, ale přesto bude rozběhový moment sériově buzeného motoru, za jinak stejných okolností, podstatně větší než rozběhový moment motoru. stejný motor s nezávislým nebo paralelním buzením.
Závislosti n a M na výkonu P2 na hřídeli motoru (obr. 4, c), jak vyplývá z výše uvedených ustanovení, jsou nelineární, závislosti P1, Ip a η na P2 mají stejný tvar jako u motory s paralelním buzením.
elektrický motor stejnosměrný proud se smíšeným vzrušením
V tomto elektromotoru (obr. 5, a) je magnetický tok Ф vytvořen jako výsledek společného působení dvou budicích vinutí - paralelního (nebo nezávislého) a sériového, kterými procházejí budicí proudy Iv1 a Iv2 \u003d Ib
Proto
![]()
kde Фposl je magnetický tok sériového vinutí, závislý na proudu Il, Фpar je magnetický tok paralelního vinutí, který nezávisí na zátěži (určuje se budicím proudem Iв1).
Mechanická charakteristika elektromotoru se smíšeným buzením (obr. 5, b) se nachází mezi charakteristikami motorů s paralelním (přímka 1) a sériovým (křivka 2) buzením. V závislosti na poměru magnetomotorických sil paralelního a sériového vinutí ve jmenovitém režimu je možné přiblížit charakteristiky motoru se smíšeným buzením k charakteristice 1 (křivka 3 s nízkým ppm sériového vinutí) nebo k charakteristice 2 (křivka 4 pro malé ppm).s paralelním vinutím).
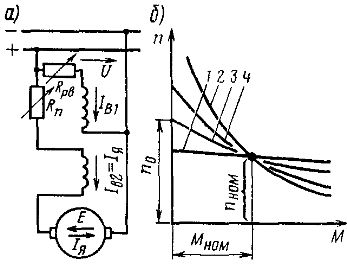
Rýže. 5. Schéma elektrického motoru se smíšeným buzením (a) a jeho mechanické charakteristiky (b)
Výhoda motoru stejnosměrný proud se smíšeným buzením je to, že má měkkou mechanickou charakteristiku a může pracovat při volnoběhu, když Fposl = 0. V tomto režimu je frekvence otáčení jeho kotvy určena magnetickým tokem Фpar a má omezenou hodnotu (motor neběží na divoko).
[dokument]1.doc
Domácí úkol #2(modul 5)
„Směrnoproudý motor se sériovým buzením. Přiřazení prvků. Princip fungování"
gr.TP-07
Asmolková O.A.
I semestr 2009
Stejnosměrný motor se sériovým buzením. Přiřazení prvků. Princip činnosti
1. Zařízení a účel prvků stejnosměrného motoru
.
DC motor - elektrický stroj , DC stroj, transformace elektrická energie DC vstup mechanická energie. Skládá se jako všechny stejnosměrné stroje z pevného statoru s póly a rotujícího rotoru (kotvy) s kolektorem.
stator Stejnosměrný stroj se skládá z válcového rámu (skříně), pólů s budicím vinutím a koncových štítů ( rýže. 2.1.). Na lůžku jsou hlavní (hlavní) póly zesíleny pro vybuzení hlavního magnetického toku a přídavné pro zlepšení spínání v motoru. Hlavní pól se skládá z jádra pólu vyrobeného z ocelového plechu a přišroubovaného k rámu a budicí cívky. Jádro na volném konci je opatřeno pólovým nástavcem pro vytvoření požadovaného rozložení magnetické indukce po obvodu kotvy. postel 3 je jho stroje, tj. část, která uzavírá magnetický obvod hlavního toku Ф. Je vyrobena z ocelolitiny, protože magnetický tok v ní je relativně konstantní. Další póly jsou instalovány na rámu mezi hlavními. Jejich vinutí je zapojeno do série s vinutím kotvy. Účelem těchto pólů je vytvořit dodatečné magnetické pole. To je nutné, aby kartáče na sběrači nejiskřily.
Kotva (rotor) se nazývá část stroje, v jehož vinutí, když se otáčí vzhledem k hlavnímu magnetické pole EMF je indukováno. Kotva 5 Stejnosměrný motor se skládá z ocelové hřídele, ocelového ozubeného jádra, vinutí uloženého v jeho drážkách a kolektoru namontovaného na hřídeli kotvy ( rýže. 2.1.). Polní vinutí jsou nezbytná pro zajištění optimální interakce mezi magnetickými poli rotoru a statoru (tj maximální točivý moment na rotoru). charakteristická část motoru (nebo jakákoliv elektrický stroj) DC je kolektor. Jedná se o dutý válec sestavený z klínovitých měděných plátů izolovaných od sebe. Desky rozdělovače jsou také izolovány od hřídele motoru. Jsou spojeny vodiči se závity vinutí uloženými v drážkách kotvy. Rotační vinutí je spojeno s vnějším obvodem kluzným kontaktem mezi kartáči a komutátorem. Kolektor u stejnosměrných strojů slouží k usměrnění proměnného EMF indukovaného ve vinutí rotující kotvy ak získání konstantního elektromagnetického momentu ve směru.
Rýže. 2. 1. Zařízení stejnosměrného motoru:
1 - budicí vinutí;2 - tyče;3 - postel;4 - hrot tyče;5 - Kotva;6 - vodiče kotevního vinutí;
7 - ozubené kotevní jádro;8 - vzduchová mezera stroje
2. Princip činnosti stejnosměrného motoru
2.1 Obecné informace
Když se vinutí kotvy otáčí v pevném magnetickém poli, indukuje se v něm proměnná EMF, která se mění s frekvencí:
Kde n- rychlost otáčení kotvy.
Když se kotva otáčí, mezi libovolnými dvěma body vinutí kotvy působí proměnná EMF. Mezi pevnými kontaktními kartáči však působí konstanta EMF co do velikosti a směru E rovnající se součtu okamžitých hodnot EMF indukovaných ve všech sériově zapojených závitech kotvy umístěných mezi těmito kartáči.
EMF závislost E od magnetického toku stroje a rychlosti otáčení kotvy má tvar:
Při připojení vinutí kotvy k síti s napětím U, EMF E bude přibližně rovna napětí U a rychlost rotoru:
Proto v důsledku přítomnosti kolektoru, když stejnosměrný stroj pracuje v režimu motoru, rychlost rotoru není striktně vázána na frekvenci sítě, ale může se měnit v širokém rozsahu změnou napětí. U a magnetický tok F. Osa symetrie oddělující póly stejnosměrného stroje se nazývá jeho geometrický neutrál.
Při otevřeném vnějším obvodu proud ve vinutí kotvy neprotéká, protože EMF indukované ve dvou částech vinutí kotvy umístěných na obou stranách geometrického neutrálu směřují opačně a vzájemně se kompenzují. Aby bylo možné dodávat maximální napětí z vinutí kotvy do vnějšího obvodu, musí být tento obvod připojen ke dvěma bodům vinutí kotvy, mezi nimiž funguje největší rozdíl potenciálů, kde by měly být instalovány kartáče. Když se kotva otáčí, body se pohybují z geometrického neutrálu, ale stále více nových bodů vinutí se přibližuje ke kartáčům, mezi kterými působí EMF E, takže EMF ve vnějším obvodu se nezmění ve velikosti a směru. Pro snížení zvlnění EMF při přechodu kartáčů z jedné kolektorové desky na druhou je obvykle v každé paralelní větvi vinutí kotvy zahrnuto alespoň 16 aktivních vodičů.
Na kotvě, jejímž vinutím protéká proud já elektromagnetický moment působí:
Když stroj běží v režimu motoru, elektromagnetický moment se otáčí.
2.2 Reakce kotvy stejnosměrného motoru
Při volnoběhu je magnetický tok v motoru vytvářen pouze HC ^F v budicích vinutích. V tomto případě magnetický tok F PROTI s konstantní vzduchovou mezerou mezi kotvou a jádrem hlavního pólu (která je typická pro mnoho stejnosměrných strojů) je rozložena symetricky vzhledem k podélné ose strojů.
Když stroj pracuje pod zatížením, prochází vinutím kotvy proud a NS kotvy vytváří vlastní magnetické pole. Vliv pole kotvy na magnetické pole stroje se nazývá kotevní reakce. magnetický tok F aq vytvořila kotva F aq ve dvoupólovém stroji je při instalaci kartáčů na neutrál nasměrován podél příčná osa stroje, proto se magnetické pole kotvy nazývá příčné. V důsledku toku F aq symetrické rozložení magnetického pole stroje je zkreslené a výsledný tok F střih je soustředěna především na okrajích hlavních pólů. V tomto případě fyzikální neutrální b-b(přímka spojující body kružnice kotvy, ve kterých je indukce nulová) je posunuta vůči geometrickému neutrálu a-a o určitý úhel β (obr.2.2). U motorů je fyzický neutrál posunut proti směru otáčení.
Na základě zákona plný proud NS armatura působící ve vzduchové mezeře ve vzdálenosti x od osy hlavních pólů je určena výrazem:
Proto kotvy NS F aq se mění lineárně podél jeho obvodu; pod středem hlavního pólu se rovná nule a v místech, kde jsou instalovány kartáče, má maximální hodnotu. Magnetická indukce ve vzduchu
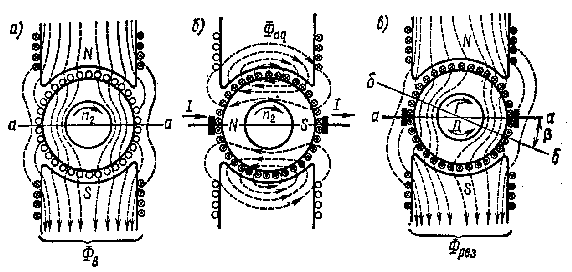
^ Obr.2.2 - Magnetické pole stejnosměrného motoru: a) z budícího vinutí; b) z vinutí kotvy; c) výsledný (F PROTI - magnetický tok při x.x.; F aq - magnetický tok vytvářený kotvou NS; F střih - výsledný proud; a-a - geometrický neutrální; b-b - fyzikální neutrální; β – neutrální úhel posunutí b-b)
Vůle s nenasyceným magnetickým systémem:
Kde je hodnota vzduchové mezery v bodě x.
2.3 Točivý moment stejnosměrného motoru
Pokud jsou budicí vinutí a kotva motoru připojeny ke stejnosměrné síti s napětím ^u pak vzniká elektromagnetický točivý moment M Em. Užitečný točivý moment M na hřídeli motoru je menší než elektromagnetický o hodnotu protipůsobného momentu vytvářeného ve stroji třecími silami a rovný momentu M X ve studeném režimu, tzn. M = M Em -M X .
Startovací moment motor musí být větší než statická brzda M t ve stavu klidu rotoru, jinak se kotva motoru nezačne otáčet. V ustáleném stavu (v n = const) existuje rovnováha rotačních M a brzdných M t momentů:
M = M Em – M X = M T
Z mechaniky je známo, že mechanická síla motoru lze vyjádřit točivým momentem a úhlovou rychlostí
Proto užitečný točivý moment motoru ^M(N m) vyjádřeno jako čistý výkon R(kW) a rychlost n(ot./min),
M = 9550 P/n
Pojďme diskutovat o některých důležitých otázkách spouštění a provozu stejnosměrných motorů. Z rovnice elektrického stavu motoru to vyplývá
já já = (U -- E)/R já
V provozním režimu je proud kotvy I I omezen např. d.s. E, je-li n přibližně rovno n nom. V době spuštění je n = 0, e. d.s. E = 0 a startovací proud já P = U/ R já 10-30krát více než nominální. Proto je nepřípustný přímý start motoru, tedy přímé připojení kotvy k síťovému napětí. Pro omezení vysokého rozběhového proudu kotvy je před spuštěním do série s kotvou zapojen spouštěcí reostat. R P s malým odporem. V tomto případě, kdy E = O
já P =U/(R já - R P ) << U/R já
Odpor reostatu RP se volí podle přípustného proudu kotvy.
Jakmile motor zrychlí na jmenovité otáčky e. d.s. E se zvyšuje a proud klesá a spouštěcí reostat je postupně zcela odstraněn (spouštěcí reostaty jsou počítány pro krátkodobé zapnutí). Seřízení reostatu R reg v budicím obvodu s relativně vysokým odporem (desítky a stovky ohmů) se před spuštěním motoru zcela odstraní, takže při rozběhu budící proud a magnetický tok statoru F byly nominální. To vede ke zvýšení rozběhového momentu, což zajišťuje rychlou a snadnou akceleraci motoru.
Po nastartování a akceleraci nastává ustálený chod motoru, při kterém se brzdný moment na hřídeli ^ Mt bude vyvážen momentem vyvinutým motorem M Em , tj. M Em == M T ( na n = const. )
Stejnosměrné motory mohou obnovit ustálený provozní stav narušený změnou brzdného momentu, tj. mohou vyvinout moment M, rovna nové hodnotě brzdného momentu M T odpovídající novou rychlostí n".
Pokud je totiž brzdný moment zátěže M t větší než moment motoru M Em, pak se rychlost kotvy sníží. Při konstantním napětí U a proudit F to způsobí pokles. d.s. E kotvou, zvyšující proud kotvy a točivý moment, dokud není dosaženo rovnováhy, při které M Em = M T A n" < n. Když se brzdný moment sníží na Mt, nastaví se obdobně ustálený provozní režim at M Em = M T" A n"> n" . Stejnosměrné motory tedy mají vlastnost samoregulace - může vyvinout moment rovný brzdnému momentu.
2.4 Řízení frekvence
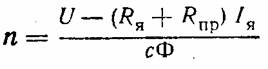
Rychlost kotvy stejnosměrného motoru je určena na základě rovnice elektrického stavu U= ER já já já po dosazení e do něj. d.s. E = sfn:

Pokles napětí kotvy R já já já malý: při jmenovitém zatížení nepřekročí 0,03 - 0,07 U nom .
Rychlost stejnosměrného motoru je tedy přímo úměrná použitému síťovému napětí a nepřímo úměrná magnetickému toku statoru. . Otáčky motoru lze regulovat dvěma způsoby: změnou toku statoru F nebo napětí U přiváděného do motoru. Regulace otáček změnou magnetického pole stroje se provádí pomocí seřizovacího reostatu v obvodu buzení motoru. Napětí dodávané do motoru se mění úpravou napětí zdroje.
K okruhu kotvy můžete přidat další reostat. V tomto případě je startovací reostat nahrazen předřadníkem R atd Takový reostat plní funkce jak spouštěcího reostatu, tak i nastavovacího reostatu. V tomto případě má rovnice frekvence otáčení kotvy pro stejnosměrný motor tvar
Z toho vyplývá, že regulaci otáček motoru lze provádět změnou síťového napětí, odporu předřadného reostatu nebo toku statoru.
Reverzace motoru. Z rovnice točivého momentu motoru M Em = kFjá já z toho vyplývá, že reverzaci, tedy změnu směru otáčení kotvy, lze provést změnou směru proudu v budícím vinutí (průtok F) nebo proud kotvy.
Pro obrácení motoru „za chodu“ se změní směr proudu kotvy (přepnutím vývodů kotvy) a nespíná se budicí vinutí, protože má velkou indukčnost a přerušení jeho obvodu proudem je nepřípustné. Reverzace odpojeného motoru se také provádí změnou směru proudu v budícím vinutí (přepnutím jeho výstupů).
3. Motor se sériovým buzením
V motoru se sériovým buzením ( obr.2.3a) budicí proud se rovná proudu kotvy: já PROTI = já A, takže magnetický tok Ф je funkcí zatěžovacího proudu já A. Charakter této funkce se liší v závislosti na velikosti zatížení. Na já A <(0,8...0,9) I nom když je magnetický systém nenasycený, f=k F já A a koeficient proporcionality NA F ve značném rozsahu zatížení zůstává téměř konstantní. Při dalším zvyšování zátěže se průtok F roste pomaleji než já A >I nom), to můžeme předpokládat F=konst. V souladu s tím se mění i závislosti. n=f(I A ), M=f(I A) (rýže. 2.3.b).
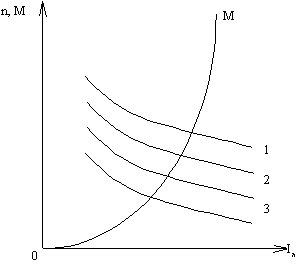
Rýže. 2.3. - a) schéma motoru se sekvenčním buzením; b) závislost jeho momentu a rychlosti otáčení na proudu kotvy (I já – proud kotvy; já PROTI – budicí proud;r n
– odolnost proti zatížení;
n- rychlost otáčení; 1 - přírodní charakteristika; 2,3 - reostatické charakteristiky odpovídající různým hodnotám přídavného odporu r n ).
Kromě přirozených charakteristik 1 je možné získat rodinu reostatických charakteristik 2, 3 a 4 zahrnutím dalších odporů r n do obvodu kotvy.Čím větší je hodnota r n, tím nižší je charakteristika.
Při nízkém zatížení se otáčky n prudce zvyšují a mohou překročit maximální přípustnou hodnotu (motor přejde do "rozchodu"). Takové motory proto nelze použít k pohonu mechanismů pracujících v klidovém režimu a při nízké zátěži.
S tuhou charakteristikou rychlost otáčení n téměř nezávisí na momentu M, proto výkon:
![]() , Kde S 4
- konstantní.
, Kde S 4
- konstantní.
S měkkou charakteristikou motoru je n nepřímo úměrné, v důsledku čehož:
![]() , kde je konstanta.
, kde je konstanta.
Proto, když se zatěžovací moment mění v širokém rozsahu, výkon R 2 , a tedy ta síla R 1 a aktuální já A změna u motorů se sériovým buzením v menší míře než u motoru s paralelním buzením, navíc lépe snášejí přetížení.
U tohoto motoru je budicí vinutí zapojeno do série s obvodem kotvy (obr. 29.9, A), Proto magnetický tokF záleží na zatěžovacím proudu I = I a = I in . Při malých zátěžích není magnetický systém stroje saturován a závislost magnetického toku na zatěžovacím proudu je přímo úměrná, tzn. F = k f I A (k F- koeficient proporcionality). V tomto případě najdeme elektromagnetický moment:
Vzorec frekvence rotace bude mít tvar
 . (29.15)
. (29.15)
Na Obr. 29,9, b prezentovány údaje o výkonu M = F(I) A n= (já) sériový budicí motor. Při vysokém zatížení dochází k saturaci magnetického systému motoru. V tomto případě se magnetický tok prakticky nemění s rostoucí zátěží a charakteristiky motoru se stávají téměř přímočarými. Rychlostní charakteristika motoru sériového buzení ukazuje, že otáčky motoru se výrazně mění se změnami zatížení. Tato vlastnost se nazývá měkký.
Rýže. 29.9. Sekvenční buzení motor:
A- Kruhový diagram; b- výkonnostní charakteristiky; c - mechanické vlastnosti; 1 - přirozená vlastnost; 2 - umělá vlastnost
Se snížením zatížení motoru sekvenčního buzení se rychlost otáčení prudce zvyšuje a při zatížení menším než 25% jmenovité hodnoty může dosáhnout hodnot, které jsou pro motor nebezpečné („překmit “). Proto je nepřípustný provoz sériového budícího motoru nebo jeho rozběh se zatížením hřídele menším než 25 % jmenovitého.
Pro spolehlivější provoz musí být hřídel motoru sekvenčního buzení pevně spojena s pracovním mechanismem pomocí spojky a převodu. Použití řemenového pohonu je nepřijatelné, protože v případě přetržení nebo resetování řemenu může motor „dojít“. Vzhledem k možnosti provozu motoru při zvýšených otáčkách jsou sériové budicí motory podle GOST testovány po dobu 2 minut, aby překročily rychlost o 20% nad maximální uvedenou na továrním štítu, ale ne méně než o 50% nad nominální.
Mechanické vlastnosti sériový budicí motor n=f(M) jsou uvedeny na Obr. 29,9, PROTI. Ostře klesající křivky mechanických charakteristik ( přírodní 1 a umělý 2 ) zajišťují sekvenčnímu buzení stabilní provoz při jakémkoli mechanickém zatížení. Vlastnost těchto motorů vyvinout velký točivý moment úměrný druhé mocnině zatěžovacího proudu je důležitá zejména při obtížných startovacích podmínkách a při přetížení, protože s postupným zvyšováním zatížení motoru se výkon na jeho vstupu zvyšuje pomaleji. než točivý moment. Tato vlastnost sériových budicích motorů je jedním z důvodů jejich vzniku široké uplatnění jako trakční motory v dopravě, stejně jako jeřábové motory ve zdvihacích zařízeních, tedy ve všech případech elektrického pohonu s obtížnými startovacími podmínkami a kombinací značného zatížení hřídele motoru s nízkou rychlostí.
Změna jmenovitých otáček motoru sériového buzení
 , (29.16)
, (29.16)
Kde n - rychlost otáčení při zatížení motoru 25 % jmenovité.
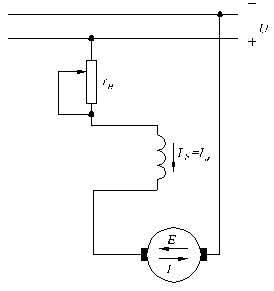
Rychlost otáčení motorů se sériovým buzením lze řídit změnou obou napětí U, nebo magnetický tok budícího vinutí. V prvním případě úprava reostat R rg (obr. 29.10, A). S nárůstem odporu tohoto reostatu klesá napětí na vstupu motoru a frekvence jeho otáčení. Tento způsob řízení se používá hlavně u motorů s malým výkonem. V případě značného výkonu motoru je tento způsob neekonomický z důvodu velkých energetických ztrát v R rg . Kromě, reostat R rg , počítáno na provozní proud motoru se ukazuje jako těžkopádné a drahé.
Když pracuje několik motorů stejného typu společně, rychlost otáčení se reguluje vzájemnou změnou schématu jejich zařazení (obr. 29.10, b). Takže když jsou motory zapojeny paralelně, každý z nich je pod plným síťovým napětím, a když jsou dva motory zapojeny do série, každý motor představuje polovinu síťového napětí. Při současném provozu většího počtu motorů je možný větší počet možností spínání. Tento způsob regulace rychlosti se používá u elektrických lokomotiv, kde je instalováno několik stejných trakčních motorů.
Je možné změnit napětí dodávané do motoru když je motor napájen ze stejnosměrného zdroje s regulovaným napětím (např. podle obvodu podobného obr. 29.6, A). S poklesem napětí přiváděného do motoru se jeho mechanické charakteristiky posouvají dolů, prakticky beze změny jejich zakřivení (obr. 29.11).
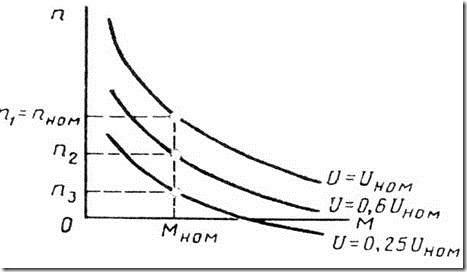
Rýže. 29.11. Mechanická charakteristika sériového budícího motoru se změnou vstupního napětí
Existují tři způsoby, jak regulovat otáčky motoru změnou magnetického toku: posunutím budícího vinutí pomocí reostatu r rg , dělením budícího vinutí a posunováním vinutí kotvy pomocí reostatu r w . Zapnutí reostatu r rg , posunování budícího vinutí (obr. 29.10, PROTI), stejně jako snížení odporu tohoto reostatu vede ke snížení budícího proudu I v \u003d I a - I rg a v důsledku toho ke zvýšení rychlosti otáčení. Tento způsob je ekonomičtější než předchozí (viz obr. 29.10, A), se používá častěji a odhaduje se regulačním koeficientem
 .
.
Obvykle odpor reostatu r rg bráno tak, že krg >= 50 % .
Při dělení budícího vinutí (obr. 29.10, G) vypnutí části závitů vinutí je doprovázeno zvýšením rychlosti otáčení. Při posunování vinutí kotvy pomocí reostatu r w (viz obr. 29.10, PROTI) vzrůstá budicí proud I v \u003d I a + I rg , což způsobuje snížení rychlosti otáčení. Tento způsob regulace, přestože poskytuje hloubkovou regulaci, je neekonomický a používá se velmi zřídka.
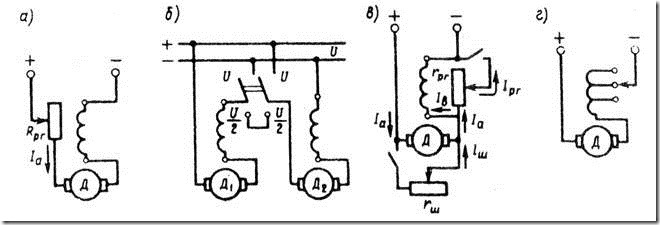
Rýže. 29.10. Regulace otáček sériových budicích motorů





