Odeslat svou dobrou práci do znalostní báze je jednoduché. Použijte níže uvedený formulář
Studenti, postgraduální studenti, mladí vědci, kteří využívají znalostní základnu ve svém studiu a práci, vám budou velmi vděční.
Hostováno na http://www.allbest.ru/
ukrajinština státní akademiiželezniční doprava
Centrum vědeckého a praktického vzdělávání
z oboru "Elektrotechnika"
"Motor stejnosměrný proud s paralelním buzením
Plán
1. Úvod
2. Konstrukce stejnosměrného motoru
3. Startování motorů
4. Technické údaje motorů
5. Charakteristika stejnosměrného motoru
6. Mechanická charakteristika
7. Seznam použité literatury
Stejnosměrný motor (stejnosměrný motor) je měnič stejnosměrné elektrické energie na mechanickou energii. Konstrukce motoru je na obr.1. Má tři hlavní části: stator (induktor), kotvu a kolektor.
Induktor (1) - pevná část stroje, je dutý ocelový litý válec vyrobený z elektrooceli, ke kterému uvnitř jádra (póly) jsou upevněny šrouby. Na jádrech je na kartáčích připojeno budicí vinutí (OB). Induktor je navržen tak, aby vytvořil hlavní magnetické pole. Kotva (2) (otočná vnitřní část stroje) je válec sestavený z ocelových plechů. V drážkách kotvy je položeno kotevní vinutí. Kolektor (3) je upevněn na stejné hřídeli s kotvou, což je dutý válec složený z jednotlivých měděných plátů (lamel) izolovaných od sebe a od hřídele kotvy a elektricky spojených s jednotlivými částmi vinutí kotvy. Účelem kolektoru je mechanické usměrnění proměnných sinusových EMF na konstantní napětí ve velikosti a směru, které je odváděno do vnějšího obvodu pomocí kartáčů sousedících s kolektorem. Vlastnosti stejnosměrných motorů jsou dány především způsobem napájení budícího vinutí. V tomto ohledu jsou stejnosměrné motory klasifikovány do 2 typů: s nezávislé vzrušení(obr. 2a) a samobuzení (obr. 2 b, c, d)
Budicí vinutí v DCT s nezávislým buzením je napájeno samostatným stejnosměrným zdrojem (z polovodičového usměrňovače, baterie nebo budiče - DC generátoru).
U samobuzených DCT jsou obvody kotvy a induktoru elektricky propojeny, tzn. budicí vinutí je napájeno z EMF kotvy stroje.
Záleží na elektrický obvod zapojení vinutí kotvy a induktoru stroje s vlastním buzením se dále dělí na tři typy: paralelní, sériové a smíšené buzení (obr. 2 b, c, d). DPT je jako všechny elektrické stroje reverzibilní, tzn. jsou bez výrazné konstruktivní
změny mohou fungovat jak v režimu generátoru, tak v režimu motoru. Provozní režim DPT s paralelním buzením. Uvažujme provoz DPT s paralelním buzením (obr. 2b). Při připojení motoru ke stejnosměrné síti vznikají proudy v obou vinutích. V tomto případě v budícím vinutí budicí proud IB vytváří magnetické pole induktoru.
Interakce proudu kotvy s magnetickým polem induktoru vytváří elektromagnetický moment ME.
JÁ = sFIYA, (1)
kde c je konstantní koeficient;
IЯ - proud kotvy;
Ф - magnetický tok.
Elektromagnetický moment ME se od momentu MW na hřídeli motoru liší hodnotou momentu ztrát naprázdno MHH, kterou lze vzhledem k její malosti zanedbat a předpokládat, že
Ve vodičích rotující kotvy se indukuje zpětné EMF E:
kde n je rychlost otáčení kotvy;
k je konstantní faktor.
Rovnice elektrické rovnováhy motoru má tvar:
U \u003d E + IЯ RY \u003d knФ + IЯ RY, (3)
kde U je síťové napájecí napětí.
Startování motoru
Při spouštění motoru je kotva v prvním okamžiku stacionární (n = 0) a je dána (2) EMF kotvy E = knF = 0. V tomto případě je podle (3) rozběhový proud kotvy IYaP nepřijatelně velký, protože R je malé a je definováno jako:
Proto se pro omezení startovacího proudu zavádí do obvodu kotvy sériově odpor startovacího reostatu RP, který je plně zaveden před nastartováním motoru a je na výstupu po zrychlení motoru, když se zvyšuje zadní EMF (E).
Takový start motoru chrání jeho vinutí kotvy před vysokými startovacími proudy INP a umožňuje v tomto režimu získat maximální magnetický tok.
Pokud je motor nastartován na volnoběh, pak není potřeba vyvíjet maximální točivý moment MB na hřídeli. Proto lze motor nastartovat plynulým zvýšením napájecího napětí U.
Zpětný chodmotor.
Změnu směru otáčení motoru lze dosáhnout změnou proudu buď ve vinutí kotvy nebo v budícím vinutí, protože. tím se změní znaménko točivého momentu. Současná změna směru proudu v obou vinutích nemění směr otáčení motoru. Přepínání konců vinutí by mělo být provedeno až po úplném zastavení motoru.
NařízeníRychlostotáčení.
Z výrazu (3) je možné určit rychlost otáčení motoru:
stejnosměrné napájecí vinutí motoru
Ze vzorce (6) je patrné, že rychlost otáčení stejnosměrného motoru lze řídit změnou síťového napětí, budícího magnetického toku a odporu obvodu kotvy. Nejběžnějším způsobem regulace rychlosti otáčení motoru je změna magnetického toku pomocí nastavovacího reostatu v budicím obvodu.
Snížením budícího proudu se zeslabí magnetický tok a zvýší se rychlost otáčení motoru. Tato metoda je ekonomická, protože budicí proud (u paralelních budicích motorů) je 3-5% IN kotvy a tepelné ztráty v regulačním reostatu jsou velmi malé. Hlavní vlastnosti stejnosměrného motoru s paralelním buzením
Provoz stejnosměrného motoru s paralelním buzením je hodnocen podle následujících hlavních charakteristik:
Charakteristika volnoběhu: (obr.3)
n0 = ѓ (IB), přičemž U = UN = konst a IЯ = I0,
kde n0 jsou volnoběžné otáčky (bez zatížení),
I0 - proud naprázdno 5 - 10 % IH;
OSN - nominální hodnota síťové napětí.
Vezmeme-li v úvahu, že při volnoběhu je součin IЯRЯ malý ve srovnání s U, pak z (6) jsou otáčky motoru určeny inverzním vztahem k magnetickému toku Ф:
S nárůstem proudu v budícím vinutí se magnetický tok mění podél magnetizační křivky Ф = ѓ (IВ), takže vztah mezi rychlostí otáčení motoru n a budícím proudem IВ je téměř hyperbolický. Při nízkých hodnotách budícího proudu se otáčky mění téměř nepřímo. Při vysokých budicích proudech,
magnetické nasycení ocelových pólů má vliv a křivka se stává plošší a probíhá téměř rovnoběžně s osou úsečky. Prudká změna - pokles budícího proudu, stejně jako náhodné přerušení budícího obvodu podle (9) může způsobit "rozběhnutí" motoru (když IВ > 0, a tedy Ф má také tendenci k 0, n > ?).
Mechanická charakteristika. Toto je závislost rychlosti otáčení rotoru na MV momentu na hřídeli motoru při konstantním síťovém napájecím napětí a budícím proudu:
n \u003d ѓ (MV), s U \u003d UH \u003d const, IВ \u003d const.
U motoru s paralelním buzením je moment MV úměrný prvnímu stupni proudu kotvy IЯ. Proto lze mechanickou charakteristiku znázornit závislostí n (Ib), která se nazývá elektromechanická nebo rychlostní (obr. 4).
Na hřídel motoru působí zatížení (brzdný moment). Podle (6) je při konstantních hodnotách budícího proudu pokles rychlosti otáčení n důsledkem poklesu napětí v obvodu kotvy - IЯ·RЯ a reakce kotvy. S nárůstem zatížení se rychlost otáčení snižuje o zanedbatelné množství, řádově o 3-8%. Tato rychlostní charakteristika se nazývá tuhá. Regulační charakteristika (obr. 5). Jedná se o závislost budícího proudu IB na proudu kotvy IA at konstantní napětí síť U a konstantní rychlost otáčení n:
IВ \u003d ѓ (IЯ) v U \u003d OSN, n \u003d konst.
Z rozboru vnější charakteristiky je vidět, že se zvyšujícím se zatížením rychlost otáčení klesá.
Řídicí charakteristika umožňuje posoudit, jak, v jakých mezích je nutné regulovat proud v budícím vinutí, aby byla zachována konstantní rychlost otáčení.
Experimentální technika
Studium provozních režimů DPT s paralelním buzením je prováděno na
modulární vzdělávací komplex MUK-EP1, který se skládá z:
napájení stejnosměrného motoru BPP1;
Napájecí zdroj pro asynchronní motor BPA1
Elektrická strojní jednotka MA1-AP.
PL073U3 (220 V, 180 W,
1500 otáček za minutu). Automatické spínání vinutí motoru a připojení měření
zařízení se provádí v bloku BPP1.
Používá se jako zátěž asynchronní motor(BP) v režimu dynamické brzdění. Automatické přepínání vinutí BP a připojení měřící nástroje k tomu se provádí v bloku BPA1.
Schéma činnosti komplexu po přepnutí bloků je na obr.6.
Bibliografie
1. Katsman M.M. Elektrická auta. - M.: Vyšší. škola, 1993.
2. Kopylov I.P. Elektrická auta. - M.: Energoatomizdat, 1986
Hostováno na Allbest.ru
...Podobné dokumenty
Princip činnosti a zařízení stejnosměrných generátorů. Elektromotorická síla a elektromagnetického momentu stejnosměrného generátoru. Způsoby buzení stejnosměrných generátorů. Vlastnosti a vlastnosti motorů různé druhy vzrušení.
abstrakt, přidáno 12.11.2009
Řízení otáček stejnosměrných motorů změnou budícího toku. Maximální proudová ochrana elektrického pohonu. Rychlostní charakteristiky motoru. Schémata silových obvodů stejnosměrných motorů a asynchronních motorů.
semestrální práce, přidáno 30.03.2014
Princip činnosti stejnosměrného generátoru. Kotevní vinutí a proces buzení stejnosměrných strojů. Vinutí s "mrtvou" částí. Příklad jednoduché smyčky a vlnového vinutí. Stejnosměrný motor s sekvenční buzení.
prezentace, přidáno 11.9.2013
Konstrukce a princip činnosti elektrické stroje stejnosměrný proud. Studium zátěžových, vnějších a regulačních charakteristik a provozních vlastností generátoru s nezávislým buzením. Vlastnosti spouštění motoru s paralelním systémem buzení.
laboratorní práce, přidáno 2.9.2014
Studium mechanických charakteristik stejnosměrných motorů s paralelním, nezávislým a sériovým buzením. brzdné režimy. elektrický motor střídavý proud s fázovým rotorem. Studium spouštěcích obvodů motoru, časové funkce.
laboratorní práce, přidáno 23.10.2009
Princip činnosti a zařízení stejnosměrného generátoru. Typy vinutí kotvy. Způsoby buzení stejnosměrných generátorů. Reverzibilita stejnosměrných strojů. Motor paralelního, nezávislého, sériového a smíšeného buzení.
abstrakt, přidáno 17.12.2009
Konstrukce stejnosměrného motoru. Jádro hlavních plusů, typ a rozteč vinutí kotvy. Počet závitů vinutí, kolektorové desky, štěrbiny. Magnetizační charakteristika motoru. Hmotnost drátů vinutí kotvy a hlavní dynamické indikátory.
semestrální práce, přidáno 21.05.2012
Napájení motoru při regulaci otáček změnou hodnoty napětí ze samostatného regulovaného stejnosměrného zdroje. Aplikace tyristorových měničů ve stejnosměrných elektrických pohonech. Strukturální schéma tyristorový měnič.
semestrální práce, přidáno 02.01.2015
Modelování startu stejnosměrného motoru DP-62 pro pohon ingotového vozíku pomocí balíčku SciLab. Blokové schéma modelu, jeho prvky. Pasové údaje motoru DP-62, typ buzení. Přechodový diagram, vykreslování.
laboratorní práce, přidáno 18.06.2015
Vlastnosti výpočtu stejnosměrného motoru z polohy řídicího objektu. Výpočet tyristorového měniče, snímačů elektrického pohonu a snímače proudu. Schéma stejnosměrného motoru s nezávislým buzením. Modelování vnějšího obrysu.
Kapitola 29
Základní pojmy
M, rotující.
antielektromotorický
![]() .
(29.1)
.
(29.1)
![]() , (29.3)
, (29.3)
![]() ,
,
![]() .
.
Ale podle (25.24)
![]()
![]() , (29.4)
, (29.4)
![]() .
.
M, .
tj. U nebo snížení průtoku F ;
ty F
F
Start motoru
U .
startovací reostaty
R Ó 1
![]() .
.
Zároveň přes páku R a pneumatika W R,
,
M přímo úměrné průtoku F F
Kapitola 29
Základní pojmy
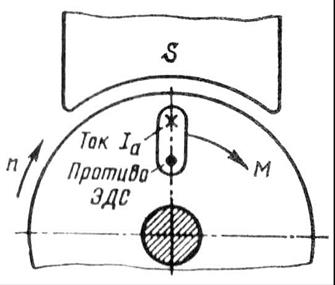
Sběrné stroje mají vlastnost reverzibility, to znamená, že mohou pracovat jak v režimu generátoru, tak v režimu motoru. Pokud je tedy stejnosměrný stroj připojen ke zdroji stejnosměrného proudu, pak se v budicím vinutí a ve vinutí kotvy stroje objeví proudy. Interakcí proudu kotvy s budícím polem vzniká na kotvě elektromagnetický moment M, což není brzdění, jako tomu bylo u generátoru, ale rotující.
Pod vlivem elektromagnetický točivý moment armaturou se stroj začne otáčet, tj. stroj bude pracovat v režimu motoru, spotřebovávat elektrickou energii ze sítě a přeměňovat ji na mechanickou energii. Během chodu motoru se jeho kotva otáčí v magnetickém poli. Ve vinutí kotvy se indukuje EMF, jehož směr lze určit pravidlem "pravé ruky". Svou povahou se neliší od EMF indukovaného ve vinutí kotvy generátoru. V motoru je EMF namířeno proti proudu, a proto se nazývá antielektromotorický síla (back-EMF) kotvy (obr. 29.1).
Pro motor běžící konstantní rychlostí,
![]() .
(29.1)
.
(29.1)
Z (29.1) vyplývá, že napětí přiváděné do motoru je vyváženo zadním EMF vinutí kotvy a úbytkem napětí v obvodu kotvy. Na základě (29.1) proudu kotvy
Vynásobením obou stran rovnice (29.1) proudem kotvy dostaneme výkonová rovnice pro obvod kotvy:
![]() , (29.3)
, (29.3)
kde je výkon v obvodu vinutí kotvy; - výkon elektrických ztrát v obvodu kotvy.
Abychom objasnili podstatu výrazu, provedeme následující transformaci:
![]() ,
,
![]() .
.
Ale podle (25.24)
![]()
![]() , (29.4)
, (29.4)
kde je úhlová frekvence otáčení kotvy; - elektromagnetický výkon motoru.
Proto je výraz elektromagnetický výkon motoru.
Transformační výraz (29.3) s přihlédnutím k (29.4) získáme
![]() .
.
Analýza této rovnice ukazuje, že se zvýšením zatížení hřídele motoru, tj. se zvýšením elektromagnetického momentu M, zvyšuje výkon v obvodu vinutí kotvy, tj. výkon na vstupu motoru. Ale protože napětí dodávané do motoru zůstává nezměněno, je zvýšení zatížení motoru doprovázeno zvýšením proudu ve vinutí kotvy .
Stejnosměrné motory, stejně jako generátory, se podle způsobu buzení dělí na motory s buzením z permanentních magnetů (magnetoelektrické) a s buzením elektromagnetickým. Ty jsou v souladu se schématem pro zapínání budícího vinutí vzhledem k vinutí kotvy rozděleny na paralelní (boční), sériové (sériové) a smíšené (složené) budicí motory.
Podle vzorce EMF, otáčky motoru (ot./min)
Dosazením hodnoty z (29.1) dostaneme (ot./min.)
tj. otáčky motoru jsou přímo úměrné napětí a nepřímo úměrné budícímu toku. Fyzicky se to vysvětluje tím, že zvýšení napětí U nebo snížení průtoku F způsobí zvýšení rozdílu ; to zase vede ke zvýšení proudu [viz obr. (29,2)]. V důsledku toho zvýšený proud zvyšuje točivý moment, a pokud točivý moment zatížení zůstane nezměněn, otáčky motoru se zvýší.
Z (29.5) vyplývá, že otáčky motoru lze řídit buď změnou napětí ty dodávané do motoru, nebo hlavní magnetický tok F nebo elektrický odpor v obvodu kotvy.
Směr otáčení kotvy závisí na směrech magnetického toku buzení F a proud ve vinutí kotvy. Změnou směru kterékoli z těchto veličin tedy můžete změnit směr otáčení kotvy. Je třeba mít na paměti, že přepnutím společných svorek obvodu u nožového spínače se nemění směr otáčení kotvy, protože se tím současně mění směr proudu jak ve vinutí kotvy, tak v budicím vinutí.
Start motoru
Proud kotvy motoru je určen vzorcem (29.2). Pokud přijmete U a beze změny, pak proud závisí na zpětném EMF . Proud dosáhne maximální hodnoty při nastartování motoru. V počátečním okamžiku rozběhu je kotva motoru nehybná a v jejím vinutí se neindukuje EMF. Proto při přímém připojení motoru k síti vzniká ve vinutí jeho kotvy zapínací proud
Obvykle je odpor malý, takže hodnota startovacího proudu dosahuje nepřijatelně velkých hodnot, 10-20krát vyšších než jmenovitý proud motor.
Tak velký rozběhový proud je pro motor velmi nebezpečný. Za prvé může způsobit celoplošný požár stroje a za druhé při takovém proudu vzniká v motoru nadměrně velký rozběhový moment, který působí rázově na rotující části motoru a může je mechanicky zničit. A konečně tento proud způsobuje prudký pokles napětí v síti, což nepříznivě ovlivňuje provoz ostatních spotřebitelů zařazených do této sítě. Proto se spouštění motoru přímým připojením k síti (nereostatický start) obvykle používá u motorů s výkonem do 0,7-1,0 kW. U těchto motorů je v důsledku zvýšeného odporu vinutí kotvy a malých rotujících hmot hodnota rozběhového proudu pouze 3-5x vyšší než jmenovitý proud, což pro motor nepředstavuje nebezpečí. U motorů s větším výkonem se při jejich spouštění omezuje rozběhový proud. startovací reostaty(PR), zařazený do série v obvodu kotvy (reostatický start).
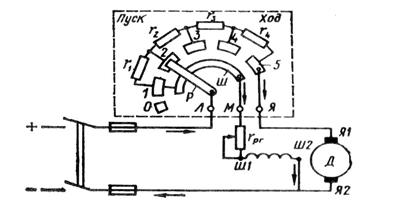
Před nastartováním motoru potřebujete páku R přepněte reostat na klidový kontakt Ó(obr. 29.2). Poté zapněte nožový spínač, přesuňte páku na první mezikontakt 1
a obvod kotvy motoru je připojen k síti přes nejvyšší odpor reostatu ![]() .
.
Rýže. 29.2. Schéma zapnutí startovacího reostatu
Zároveň přes páku R a pneumatika W k síti je připojeno budicí vinutí, jehož proud po celou dobu rozběhu nezávisí na poloze páky R, jelikož odpor sběrnice je oproti odporu budícího vinutí zanedbatelný.
Rozběhový proud kotvy na impedanci rozběhového reostatu
S příchodem proudu do obvodu kotvy dochází k rozběhovému momentu, pod jehož vlivem začíná rotace kotvy. S rostoucí rychlostí se zvyšuje back-emf , což vede ke snížení rozběhového proudu a rozběhového momentu.
Při zrychlování kotvy motoru se páka startovacího reostatu přepne do polohy 2, 3 atd. V poloze 5 páčky reostatu startování motoru končí. Odpor spouštěcího reostatu se obvykle volí tak, aby největší rozběhový proud převyšoval jmenovitý proud nejvýše 2-3krát.
Od momentu motoru M přímo úměrné průtoku F[cm. (25.24)], pak pro usnadnění startu motoru paralelního a smíšeného buzení by měl být odpor reostatu v budicím obvodu zcela odstraněn. tok buzení F v tomto případě dostane nejvyšší hodnotu a motor vyvíjí požadovaný točivý moment při nižším proudu kotvy.
Pro spouštění motorů většího výkonu není vhodné používat startovací reostaty, protože by to způsobilo značné energetické ztráty. Také startovací reostaty by byly objemné. Proto se u motorů s vysokým výkonem využívá bezreostatový start motoru snížením napětí. Příkladem je spouštění trakčních motorů elektrické lokomotivy jejich přepínáním sériové připojení při spuštění souběžně s normální operace(viz § 29.6) nebo spouštění motoru v okruhu generátor-motor (viz § 29.4).
Motor s paralelním buzením
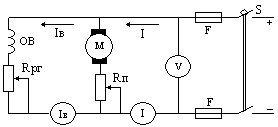
Schéma připojení paralelního budícího motoru do sítě je na obr. 29,3, A. Charakteristickým rysem tohoto motoru je, že proud v budícím vinutí (OB) nezávisí na zatěžovacím proudu (proud kotvy). Reostat v budicím obvodu slouží k regulaci proudu v budícím vinutí a magnetického toku hlavních pólů.
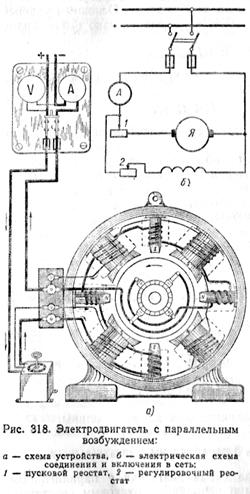
Výkonové vlastnosti motoru jsou určeny jeho provozní vlastnosti, což je chápáno jako závislost rychlosti otáčení n, proud já, užitečný okamžik M2, točivý moment M od napájení na hřídeli motoru R 2 na a (obr. 29.3, 6 ).
Abychom analyzovali závislost a , která se obvykle nazývá rychlostní charakteristika, přejdeme ke vzorci (29.5), ze kterého lze vidět, že při konstantním napětí U rychlost ovlivňují dva faktory: pokles napětí v obvodu kotvy a tok buzení F. S nárůstem zatížení klesá čitatel, zatímco v důsledku reakce kotvy klesá i jmenovatel F. Obvykle je snížení průtoku způsobené reakcí kotvy malé a první faktor ovlivňuje rychlost více než druhý. V důsledku toho se otáčky motoru zvyšují s rostoucí zátěží R 2 klesá a graf nabývá klesajícího tvaru s mírným vyboulením směrem k ose x. Pokud je reakce kotvy v motoru doprovázena výraznějším oslabením průtoku F, pak se rychlost otáčení bude zvyšovat s rostoucí zátěží, jak ukazuje čárkovaná křivka na Obr. 29,3, b. Taková závislost je však nežádoucí, protože zpravidla nesplňuje podmínku pro stabilní provoz motoru: se zvýšením zatížení motoru se zvyšuje rychlost otáčení, což vede k dodatečnému zvýšení zatížení atd., tj. rychlost otáčení n motor se neomezeně zvyšuje a motor se „přehřívá“. Aby rychlostní charakteristika získala tvar klesající křivky, používají některé bočníkové motory lehké (s malým počtem závitů) sériové budicí vinutí, tzv. stabilizační vinutí. Když je toto vinutí zapnuto v koordinaci s paralelním budícím vinutím, jeho MMF kompenzuje demagnetizační účinek reakce kotvy, takže tok F zůstává prakticky beze změny v celém rozsahu zatížení .., od
Pokud zanedbáme reakci kotvy, pak (od ) můžeme přijmout . Pak je mechanickou charakteristikou paralelního budícího motoru přímka, poněkud nakloněná k ose x (obr. 29.4, Obr. A). Úhel sklonu mechanické charakteristiky je tím větší, čím větší je hodnota odporu obsaženého v obvodu kotvy. Mechanická charakteristika motoru při absenci dodatečného odporu v obvodu kotvy se nazývá přírodní(rovný 1 ). Mechanické charakteristiky motoru, získané zavedením dodatečného odporu do obvodu kotvy, se nazývají umělý(Přímo 2 a 3 ).
Typ mechanické charakteristiky závisí také na hodnotě hlavního magnetického toku F. Tedy při snižování F rychlost otáčení x.x se zvyšuje. a současně se zvyšuje, tj. rostou oba členy rovnice (29.11). To vede k prudkému nárůstu sklonu mechanické charakteristiky, tedy ke snížení její tuhosti (obr. 29.4, Obr. b).
Při změně napětí kotvy U rychlost otáčení se mění, ale zůstává nezměněna. Tím se nemění tuhost mechanické charakteristiky (zanedbáme-li vliv reakce kotvy) (obr. 29.4, Obr. v), tj. charakteristiky se posunou ve výšce, zatímco zůstanou vzájemně rovnoběžné.
§ 138. ELEKTROMOTOR S PARALELNÍM BUDENÍM
Na Obr. 318 je schéma motoru s paralelním buzením a spouštěcím reostatem zahrnutým v obvodu kotvy. Vzhledem k tomu, že budicí vinutí je zapojeno paralelně k síti, pak když stálý odpor budicí obvod a síťové napětí, magnetický tok F motoru musí být konstantní.
Ze vzorce
je vidět, že hodnota counter-e. d.s. motor klesá s rostoucím proudem kotvy, což způsobuje, že se také snižují otáčky motoru.
Jak však již bylo zmíněno dříve, velikost úbytku napětí ve vinutí kotvy I a r a je velmi malá ve srovnání s napětím U. Proto s nárůstem zatěžovacího proudu mírně klesají otáčky motoru.
Charakteristickou vlastností motoru s paralelním buzením je tedy téměř konstantní rychlost otáčení při změně zatížení jeho hřídele. Obvykle se otáčky motorů tohoto typu při dosažení plného zatížení sníží pouze o 3-5 %.
Točivý moment motoru je úměrný součinu proudu kotvy a magnetického toku:
Z toho je vidět, že točivý moment motoru s paralelním buzením je úměrný proudu kotvy:
Proto lze podle ampérmetru zahrnutého v obvodu kotvy posuzovat zatížení motoru.
Motor bude mít nejvyšší otáčky při volnoběhu, pokud je zcela odstraněn odpor seřizovacího reostatu. Otevření budícího obvodu způsobí, že magnetický tok motoru klesne na zanedbatelné množství zbytkového magnetického toku. Vzhledem k tomu, counter-e. d.s. by se mělo téměř rovnat síťovému napětí, pak s poklesem magnetického toku se rychlost otáčení motoru prudce zvýší a stane se nebezpečným pro mechanickou pevnost motoru. Proto je při provozu motoru nutné hlídat dobrý stav budícího obvodu.
Řízení rychlosti bočníkového motoru se obvykle provádí změnou toku s proměnným reostatem v obvodu pole. Tento způsob regulace rychlosti je nejekonomičtější. Některé motory mají regulaci rychlosti v rozsahu od 1,5:1 do 4:1. Čísla ukazují poměr maximální rychlosti k minimální. Meze regulace jsou omezeny především zhoršením spínacích podmínek a mechanickou pevností kotvy.
Změnu směru otáčení motorů s paralelním buzením lze provést změnou směru proudu v budícím vinutí pólů nebo změnou směru proudu ve vinutí kotvy. Obvykle se změna otáčení provádí druhým způsobem, protože jakékoli operace s budicím vinutím jsou pro obsluhující personál nebezpečné a nežádoucí vzhledem k výskytu např. d.s. samoindukce, která může způsobit porušení izolace vinutí a spálení kontaktů.
Motory s paralelním buzením se používají ve stejnosměrných sítích k pohonu některých strojů, mechanismů (nadzemní elektrické komunikace, čerpadla, ventilátory, tkací stroje, válcovny, důlní kladkostroje), které vyžadují konstantní rychlost otáčení nebo široké nastavení rychlosti.
23 .Reakce kotvy, jeho Negativní vliv o provozu stejnosměrného motoru, způsoby kompenzace reakce kotvy.
Reakce kotvy - vliv magnetického pole vytvořeného proudem kotvy na magnetické pole hlavních pólů stroje. V klidovém režimu je proud kotvy = 0 a magnetické pole stroje je tvořeno pouze hlavními póly (obr. (a)). Je symetrický kolem osy hlavních pólů a kolem geometrického neutrálu. Pokud vypnete budicí vinutí a připojíte kotvu k zdroj napájení, pak proud tekoucí ve vinutí kotvy vytvoří magnetické pole znázorněné na obrázku (b). osa pólů tohoto pole se shoduje s osou kartáčů a je kolmá na osu pole hlavních pólů. Rotace kotvy neovlivňuje vzor pole kotvy, protože rozložení proudu ve vinutí kotvy zůstává konstantní. V provozním režimu stroje jsou obě vinutí zapnuta a magnetické pole vzniká součtem obou polí. V důsledku toho je osa magnetického pole otočena o některé úhly, fyzikální neutrál je otočen o stejný úhel. V motorovém režimu je neutrál posunut proti rotaci. V důsledku posunutí bude část vodičů paralelní větve umístěné mezi kartáčem a neutrálem pod pólem opačné polarity a bude vytvářet brzdný moment Změna zatížení stroje povede ke změně v proudu kotvy a odpovídající zvýšení nebo snížení jejího magnetického pole. Úhel se tedy bude měnit se zatížením.Reakce kotvy kromě neutrálního posunutí snižuje celkový magnetický tok z důvodu zkreslení pole pod hlavními póly. Pod jednou hranou pólu slábne a pod druhou se zvyšuje, ale intenzita pole v důsledku nasycení hrany pólu je menší než oslabení a výsledný magnetický tok se snižuje, což negativně ovlivňuje energetickou náročnost pólu. Negativní vliv na spínací proces má i posunutí fyzického neutrálu.Nejúčinnější . prostředky ke snížení vliv reakce kotvy je kompenzační vinutí. Zapadá do speciálních drážek hlavních pólů a je zapojen do série s obvodem kotvy. Magnetické pole kompenzačního vinutí je opačné a kompenzuje magnetické pole kotvy. Proud kompenzačního vinutí = proud kotvy, takže ke kompenzaci dochází ve všech režimech od volnoběhu po plnou zátěž. Díky tomu zůstává pole stroje pod hlavními póly prakticky nezměněno. Jiná cesta - zvýšit odbavení mezi okraje hlavních kůlů a kotvu. Pro udržení průtoku se zvětšením mezery je zapotřebí zvýšení MMF budícího vinutí.
Stejnosměrné elektrické stroje.
Generátor s paralelním buzením.
Výpočtové vzorce:
Proud dodávaný generátorem do sítě:
Eds. generátor: E \u003d U + Iya ∙Rya.
Výkon dodávaný do sítě: P2 \u003d U ∙ I \u003d I 2 ∙ R
Výkon motoru pohonu: P1 = P2/ η
Ztráta výkonu ve vinutí kotvy:
Rya \u003d I 2 i ∙ Rya
Ztráta výkonu v budícím vinutí:
Рв = U ∙Iв = I 2 в∙ Rв
Celkové ztráty: ΣP = P1 - ...
R2.
Účinnost generátoru:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
Motor s paralelním buzením.
Výpočtové vzorce:
Proud motoru: I \u003d Ia + Iv
Napětí motoru: U \u003d E + Ii ∙Rya.
Výkon odebíraný ze sítě: Р1 = U∙I
Výkon hřídele: P 2 = P 1 ∙η
Moment na hřídeli motoru:
M \u003d 9550 ∙ P 2 / n 2.
Účinnost motoru:
η \u003d P 2 / P 1 \u003d (U∙I-ΣP) / U∙I
Příklad 6.1. Stejnosměrný generátor s paralelním buzením vyvine jmenovité napětí Un = 220 V. Generátor je zatížen zátěží Rn = 2,2 Ohm. Odpor vinutí kotvy Rya = 0,2 Ohm, budící vinutí Rv = 220 Ohm. Účinnost generátoru η = 0,87. Určete následující množství:
1.zatěžovací proud; 2. proud kotvy; 3. budicí proud; 4. generátor emf;
5.čistý výkon; 6. spotřeba energie; 7. celkové ztráty v generátoru; 8. ztráty ve vinutí kotvy; 9. ztráty v budícím vinutí.
1. Zátěžový proud:
2. Budicí proud:
![]()
3. Proud kotvy: Iа \u003d I - Iv \u003d 100 - 1 \u003d 99 A.
4. Generátor EMF:
E \u003d U + Ii ∙ Rya \u003d 220 + 99 0,1 \u003d 229,9 V.
5. Čistý výkon:
Р2 = Un ∙ I = 220 ∙ 100 = 22 000 W = 22 kW.
6. Spotřeba energie:
7. Celkové ztráty v generátoru:
ΣP \u003d P1 - P2 \u003d 25,87 - 22 \u003d 3,87 kW.
8. Ztráty ve vinutí kotvy:
Rya \u003d Iya 2 ∙Rya \u003d 99 2 ∙0,2 \u003d 1960,2 W.
9. Ztráty v budícím vinutí:
Pv = Un ∙ Iv = 220 ∙ 1 = 220 W.
Odpověď: I = 100A; Iv \u003d 1 A; Ia = 99 A; E = 229,9 V; P2 = 22 kW;
P1 = 25,87 kW; ΣР = 3,87 kW; Rya = 1960,2 W; Pv \u003d 220 W.
Příklad 6.2. 8.2 Stejnosměrný motor s paralelním buzením pracuje ze sítě Un = 220 V. Otáčky kotvy n2 = 1450 ot/min. Proud motoru I \u003d 500 A, zadní emf kotvy E \u003d 202 V, odpor budícího vinutí Rv \u003d 44 Ohmů. Účinnost motoru
η = 0,88. Určete: 1. budicí proud; 2. proud kotvy; 3. odpor vinutí kotvy; 4. spotřeba energie; 5.užitečný výkon hřídele; 6 Celkové ztráty v motoru; 7. ztráty ve vinutí kotvy; 8. ztráty ve vinutí kotvy; 9.točivý moment na hřídeli.
1. Budicí proud:
![]()
2. Proud kotvy:
Ia \u003d I - Iv \u003d 500 -5 \u003d 495 A.
3. Odpor vinutí kotvy:
4. Spotřeba energie ze sítě:
P1 \u003d Un ∙ I \u003d 220 ∙ 500 \u003d 110 000 W \u003d 110 kW.
5. Čistý výkon hřídele:
Р2 = P1 ∙ η = 110 ∙ 0,87 = 95,7 kW.
6. Celkové ztráty v motoru:
ΣP \u003d P1 - P2 \u003d 110 - 95,7 \u003d 14,3 kW.
Doporučujeme číst
 Psychologické charakteristiky dětí v adolescenci
Psychologické charakteristiky dětí v adolescenci Přeřazení dítěte na jinou školu – postup a potřebné dokumenty Zda přeřadit dítě na jinou školu
Přeřazení dítěte na jinou školu – postup a potřebné dokumenty Zda přeřadit dítě na jinou školu, diagnostika, léčba Léčba urogenitálních chlamydií") Chlamydie urogenitální - popis, příčiny, příznaky (příznaky), diagnostika, léčba Léčba urogenitálních chlamydií
Chlamydie urogenitální - popis, příčiny, příznaky (příznaky), diagnostika, léčba Léčba urogenitálních chlamydií Výhody a význam hydroaminokyseliny threoninu pro lidský organismus L threonin co
Výhody a význam hydroaminokyseliny threoninu pro lidský organismus L threonin co

