Pro množství točivého momentu indukční motor velký vliv má fázový posun mezi proudem I 2 a e. d.s. rotor E 2S.
Zvažte případ, kdy je indukčnost vinutí rotoru malá, a proto lze fázový posun zanedbat (obr. 223, a).
Rotující magnetické pole statoru je zde nahrazeno polem pólů N a S, otáčejících se, řekněme, ve směru hodinových ručiček. Pomocí pravidla pravé ruky určíme směr e. d.s. a proudy ve vinutí rotoru. Proudy rotoru, interagující s rotujícím magnetickým polem, vytvářejí točivý moment. Směry sil působících na vodiče s proudem jsou určeny pravidlem levé ruky. Jak je patrné z výkresu, rotor se působením sil bude otáčet ve stejném směru jako samotné točivé pole, tedy ve směru hodinových ručiček.
Zvažte druhý případ, kdy je indukčnost vinutí rotoru velká. V tomto případě je fázový posun mezi rotorovým proudem I 2 a e. d.s. rotor E 2S bude také velký. Na OBR. 223, b, je magnetické pole statoru indukčního motoru stále znázorněno ve formě pravotočivých pólů N a S. Směr e. Obr. d.s. zůstává stejný jako na obr. 223, a, ale v důsledku zpoždění proudu ve fázi, os magnetické pole rotor se již nebude shodovat s neutrální čarou statorového pole, ale posune se o určitý úhel proti rotaci magnetického pole. To povede k tomu, že spolu s vytvořením točivého momentu nasměrovaného v jednom směru některé vodiče vytvoří opačný točivý moment.
Z toho je vidět, že celkový točivý moment motoru během fázového posunu mezi proudem a e. d.s. rotor je menší než pro případ, kdy jsou I 2 a E 2S ve fázi. Lze dokázat, že točivý moment indukčního motoru je určen pouze aktivní složkou rotorového proudu, tj. proudem I 2 cos a že jej lze vypočítat podle vzorce:
Ф m - magnetický tok statoru (a také přibližně stejný jako výsledný magnetický tok indukčního motoru);
Fázový úhel mezi e. d.s. a fázový proud vinutí
C je konstantní koeficient.
Po střídání:
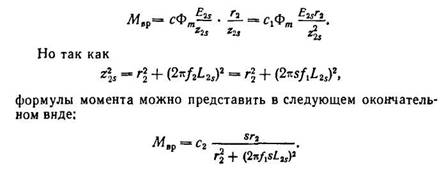
Z posledního vyjádření je vidět, že točivý moment indukčního motoru závisí na skluzu.
Na OBR. 224 ukazuje křivku A momentu motoru versus skluz. Z křivky je vidět, že v okamžiku rozběhu, kdy s=l an = 0, je moment motoru malý. To je vysvětleno skutečností, že v okamžiku spuštění je frekvence proudu ve vinutí rotoru nejvyšší a indukční odpor vinutí je velký. V důsledku toho má cos malou hodnotu (protože
|
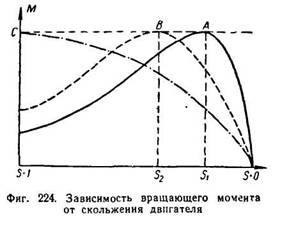
řada 0,1-0,2). Proto, i když je rozběhový proud velký, rozběhový moment bude malý.
Při určitém skluzu S 1 bude mít moment motoru maximální hodnotu. S dalším snížením prokluzu, nebo jinými slovy, s dalším zvýšením rychlosti otáčení motoru se jeho točivý moment rychle sníží.
Pro kolísání a při klouzání s = 0 bude točivý moment motoru také roven nule.
Je třeba poznamenat, že u asynchronního motoru nemůže prakticky existovat skluz rovný nule. To je možné pouze tehdy, je-li rotor externě zásobován kroutícím momentem ve směru otáčení pole statoru.
Startovací moment lze zvýšit, pokud v okamžiku spuštění dojde k fázovému posunu mezi proudem a e. d.s. rotor. Ze vzorce
je vidět, že pokud při konstantě indukční reaktance vinutí rotoru pro zvýšení aktivního odporu, pak se samotný úhel sníží, což povede k tomu, že se zvýší i točivý moment motoru. Toho se v praxi využívá ke zvýšení startovacího momentu motoru. V okamžiku startování je do okruhu rotoru přiveden aktivní odpor (startovací reostat), který je následně odstraněn, jakmile motor zvýší otáčky.
Zvýšení rozběhového momentu způsobí, že maximální moment motoru bude získán s větším skluzem (bod S2 křivky B na OBR. 224). Zvýšením aktivního odporu obvodu rotoru při rozběhu lze dosáhnout toho, že maximální krouticí moment bude v okamžiku rozběhu (s = 1 křivka C).
Točivý moment indukčního motoru je úměrný druhé mocnině napětí, takže i malý pokles napětí je doprovázen prudkým poklesem točivého momentu.
Výkon P 1 přiváděný do statorového vinutí indukčního motoru je roven:
![]()
kde m 1 je počet fází.
Stator motoru má následující energetické ztráty:
1) ve vinutí statoru R es. = m 1 1 2 r 1;
2) ve statorové oceli a hysterezi a vířivých proudech PC .
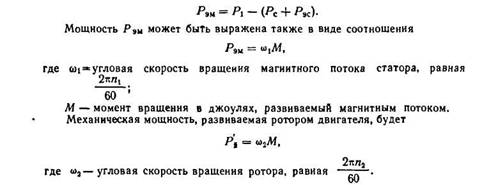
Výkon dodávaný rotoru je výkon rotujícího magnetického pole, nazývaný také elektromagnetický výkon P eM .
Elektromagnetický výkon je roven rozdílu mezi výkonem dodávaným do motoru a ztrátami ve statoru motoru, tzn.
|
Rozdíl mezi Р eM a představuje elektrické ztráty ve vinutí rotoru Р eP, pokud zanedbáme ztráty v oceli rotoru pro jejich nevýznamnost (frekvence remagnetizace rotoru je obvykle velmi malá):
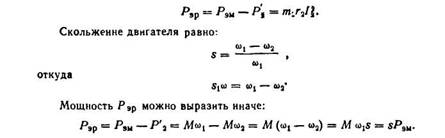
Proto jsou ztráty ve vinutí rotoru úměrné skluzu rotoru.
Pokud od mechanická síla vyvinuté rotorem, odečtěte mechanické ztráty R mx v důsledku tření v ložiskách rotoru, tření o vzduch atd., jakož i dodatečné ztráty R D vznikající při zatížení a v důsledku rozptylových polí rotoru a ztráty způsobené: pulzacemi magnetického pole v zubech statoru a rotoru, pak bude užitečný výkon na hřídeli motoru, který označíme P 2 .
Účinnost indukčního motoru lze určit podle vzorce:

Z posledního výrazu je vidět, že moment otáčení indukčního motoru je úměrný součinu velikosti rotujícího magnetického toku, proudu rotoru a kosinu úhlu mezi e. Obr. d.s. rotor a jeho proud,

Z ekvivalentního obvodu asynchronního motoru se získá hodnota redukovaného rotorového proudu, kterou uvádíme bez doložení.
Moment vyvinutý motorem se rovná elektromagnetickému výkonu dělenému synchronní rychlostí otáčení elektrického pohonu.
M \u003d P em / ω 0
Elektromagnetický výkon je výkon přenášený vzduchovou mezerou ze statoru na rotor a rovná se ztrátám v rotoru, které jsou určeny vzorcem:
P em \u003d m I 2 2 (r 2 '/s)
m je počet fází.
M \u003d M em \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s)
Elektromechanickou charakteristikou asynchronního motoru je závislost I2' na skluzu. Ale od asynchronní stroj pracuje pouze jako elektromotor, hlavní charakteristikou je mechanická charakteristika.
M \u003d Me m \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s) - zjednodušené vyjádření mechanické charakteristiky.
Dosazením aktuální hodnoty do tohoto výrazu dostaneme: M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
Místo ω 0 je třeba nahradit mechanickou rychlost, v důsledku čehož se počet párů pólů sníží.
M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] je rovnice pro mechanickou charakteristiku indukčního motoru.
Když indukční motor přejde do režimu generátoru, rychlost otáčení ω > ω 0 a skluz se stane záporným (s Když se skluz změní z 0 na +∞, režim se nazývá "režim elektromagnetické brzdy".
Při hodnotách skluzu od o do +∞ získáme charakteristiku:
Kompletní mechanická charakteristika asynchronního motoru.
Jak je patrné z mechanické charakteristiky, má dva extrémy: jeden v segmentu změny skluzu v oblasti od 0 do +∞, druhý v segmentu od 0 do -∞. dM/ds=0
M max = / ] + se vztahuje k režimu motoru. - odkazuje na režim generátoru.
M max \u003d M cr M cr - kritický moment.
Skluz, při kterém moment dosáhne svého maxima, se nazývá kritický skluz a je určen vzorcem: s cr = ±
Kritický skluz má stejnou hodnotu v režimu motoru i generátoru.
Hodnotu M cr lze získat dosazením hodnoty kritického skluzu do momentového vzorce.
Okamžik, kdy je skluz roven 1, se nazývá rozběhový moment. Výraz pro rozběhový moment lze získat dosazením 1 do vzorce:
Mp \u003d / [ω 0 [(r 1 + r 2 ’) 2 + (x 1 + x 2 ’) 2 ]]
Protože jmenovatel ve vzorci pro maximální moment je o několik řádů větší než U f, je obvyklé uvažovat M kr ≡U f 2 .
Kritický skluz závisí na hodnotě činného odporu vinutí rotoru R 2'. Startovací moment, jak je patrné ze vzorce, závisí na aktivním odporu rotoru r 2 '. této vlastnosti rozběhového momentu se využívá u asynchronních motorů s fázovým rotorem, u kterých se rozběhový moment zvyšuje zavedením aktivního odporu do obvodu rotoru.
7. Transformátor naprázdno
Klidový režim transformátoru se nazývá provozní režim, kdy je jedno z vinutí transformátoru napájeno ze zdroje se střídavým napětím a s otevřenými obvody ostatních vinutí. Tento režim provozu může být ve skutečném transformátoru, když je připojen k síti a zátěž napájená z jeho sekundárního vinutí ještě není zapnutá. Podle primární vinutí transformátoru prochází proud I 0, současně během sekundární vinutí není žádný proud, protože obvod je otevřený. Proud I 0 procházející primárním vinutím vytváří v magnetickém obvodu sinusově se měnící žlab Ф 0, který se vlivem magnetických ztrát fázově opožďuje za proudem o ztrátový úhel δ. 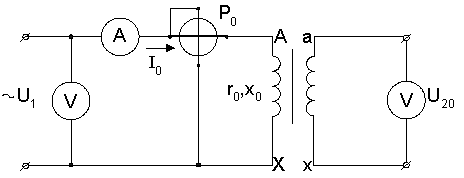
Velikost točivého momentu indukčního motoru je značně ovlivněna fázovým posunem mezi proudem I 2 a e. d.s. rotor E 2S.
Zvažte případ, kdy je indukčnost vinutí rotoru malá, a proto lze fázový posun zanedbat (obr. 223, a).
Rotující magnetické pole statoru je zde nahrazeno polem pólů N a S, otáčejících se, řekněme, ve směru hodinových ručiček. Pomocí pravidla pravé ruky určíme směr e. d.s. a proudy ve vinutí rotoru. Proudy rotoru, interagující s rotujícím magnetickým polem, vytvářejí točivý moment. Směry sil působících na vodiče s proudem jsou určeny pravidlem levé ruky. Jak je patrné z výkresu, rotor se působením sil bude otáčet ve stejném směru jako samotné točivé pole, tedy ve směru hodinových ručiček.
Zvažte druhý případ, kdy je indukčnost vinutí rotoru velká. V tomto případě je fázový posun mezi rotorovým proudem I 2 a e. d.s. rotor E 2S bude také velký. Na OBR. 223, b, je magnetické pole statoru indukčního motoru stále znázorněno ve tvaru pravotočivých pólů N a S. Směr e. Obr. d.s. zůstává stejný jako na obr. 223, a, ale vlivem fázového zpoždění proudu se osa magnetického pole rotoru již nebude shodovat s neutrální čarou pole statoru, ale posune se o určitý úhel proti rotaci magnetického pole. To povede k tomu, že spolu s vytvořením točivého momentu nasměrovaného v jednom směru některé vodiče vytvoří opačný točivý moment.
Z toho je vidět, že celkový točivý moment motoru během fázového posunu mezi proudem a e. d.s. rotor je menší než pro případ, kdy jsou I 2 a E 2S ve fázi. Lze dokázat, že točivý moment indukčního motoru je určen pouze aktivní složkou rotorového proudu, tj. proudem I 2 cos a že jej lze vypočítat podle vzorce:
Ф m - magnetický tok statoru (a také přibližně stejný jako výsledný magnetický tok indukčního motoru);
Fázový úhel mezi e. d.s. a fázový proud vinutí
C je konstantní koeficient.
Po střídání:
Z posledního vyjádření je vidět, že točivý moment indukčního motoru závisí na skluzu.
Na OBR. 224 ukazuje křivku A momentu motoru versus skluz. Z křivky je vidět, že v okamžiku rozběhu, kdy s=l an = 0, je moment motoru malý. To je vysvětleno skutečností, že v okamžiku spuštění je frekvence proudu ve vinutí rotoru nejvyšší a indukční odpor vinutí je velký. V důsledku toho má cos malou hodnotu (protože
|
řada 0,1-0,2). Proto, i když je rozběhový proud velký, rozběhový moment bude malý.
Při určitém skluzu S 1 bude mít moment motoru maximální hodnotu. S dalším snížením prokluzu, nebo jinými slovy, s dalším zvýšením rychlosti otáčení motoru se jeho točivý moment rychle sníží.
Pro kolísání a při klouzání s = 0 bude točivý moment motoru také roven nule.
Je třeba poznamenat, že u asynchronního motoru nemůže prakticky existovat skluz rovný nule. To je možné pouze tehdy, je-li rotor externě zásobován kroutícím momentem ve směru otáčení pole statoru.
Rozběhový moment lze zvýšit, pokud se v okamžiku rozběhu zmenší fázový posun mezi proudem a e. d.s. rotor. Ze vzorce
je vidět, že pokud se při konstantním indukčním odporu vinutí rotoru zvýší činný odpor, tak se zmenší i samotný úhel, což povede k tomu, že se zvýší i moment motoru. Toho se v praxi využívá ke zvýšení startovacího momentu motoru. V okamžiku rozběhu je do okruhu rotoru přiveden aktivní odpor (startovací reostat), který je následně odstraněn, jakmile motor zvýší otáčky.
Zvýšení rozběhového momentu způsobí, že maximální moment motoru bude získán s větším skluzem (bod S2 křivky B na OBR. 224). Zvýšením aktivního odporu obvodu rotoru při rozběhu lze dosáhnout toho, že maximální krouticí moment bude v okamžiku rozběhu (s = 1 křivka C).
Točivý moment indukčního motoru je úměrný druhé mocnině napětí, takže i malý pokles napětí je doprovázen prudkým poklesem točivého momentu.
Výkon P 1 přiváděný do statorového vinutí indukčního motoru je roven:
![]()
kde m 1 je počet fází.
Stator motoru má následující energetické ztráty:
1) ve vinutí statoru R es. = m 1 1 2 r 1;
2) ve statorové oceli a hysterezi a vířivých proudech PC .
Výkon dodávaný rotoru je výkon rotujícího magnetického pole, nazývaný také elektromagnetický výkon P eM .
Elektromagnetický výkon je roven rozdílu mezi výkonem dodávaným do motoru a ztrátami ve statoru motoru, tzn.
|
Rozdíl mezi Р eM a představuje elektrické ztráty ve vinutí rotoru Р eP, pokud zanedbáme ztráty v oceli rotoru pro jejich nevýznamnost (frekvence remagnetizace rotoru je obvykle velmi malá):
Proto jsou ztráty ve vinutí rotoru úměrné skluzu rotoru.
Pokud od mechanického výkonu vyvinutého rotorem odečteme mechanické ztráty R mx v důsledku tření v ložiskách rotoru, tření o vzduch atd. pole v zubech statoru a rotoru, pak bude užitečný výkon na hřídeli motoru , kterou označujeme P2.
Účinnost indukčního motoru lze určit podle vzorce:
Z posledního výrazu je vidět, že moment otáčení indukčního motoru je úměrný součinu velikosti rotujícího magnetického toku, proudu rotoru a kosinu úhlu mezi e. Obr. d.s. rotor a jeho proud,
Z ekvivalentního obvodu asynchronního motoru se získá hodnota redukovaného rotorového proudu, kterou uvádíme bez doložení.
Doporučujeme číst
, diagnostika, léčba Léčba urogenitálních chlamydií") Urogenitální chlamydie - popis, příčiny, příznaky (příznaky), diagnostika, léčba Léčba urogenitálních chlamydií
Urogenitální chlamydie - popis, příčiny, příznaky (příznaky), diagnostika, léčba Léčba urogenitálních chlamydií Výhody a význam hydroaminokyseliny threoninu pro lidský organismus L threonin co
Výhody a význam hydroaminokyseliny threoninu pro lidský organismus L threonin co Čekat či nečekat na chlapíka z armády Z jakého důvodu mohou být pověřeni z armády
Čekat či nečekat na chlapíka z armády Z jakého důvodu mohou být pověřeni z armády Pečená jablka s tvarohem Pečená jablka s tvarohem
Pečená jablka s tvarohem Pečená jablka s tvarohem

