Ne määräytyvät pääasiassa sen mukaan, miten virityskäämi on kytketty päälle. Tästä riippuen sähkömoottorit erotetaan:
1. itsenäisellä stimulaatiolla: virityskäämi saa virtansa ulkoisesta lähteestä tasavirta(herätin tai tasasuuntaaja),
2. Kanssa rinnakkainen heräte : kenttäkäämi on kytketty rinnan ankkurikäämin kanssa,
3.: kenttäkäämitys on kytketty sarjaan ankkurikäämin kanssa,
4. sekavalla jännityksellä: siinä on kaksi virityskäämiä, joista toinen on kytketty rinnan ankkurikäämin kanssa ja toinen sarjaan sen kanssa.
Kaikilla näillä sähkömoottoreilla on sama laite ja ne eroavat toisistaan vain herätekäämin toteutuksessa. Näiden sähkömoottoreiden virityskäämit suoritetaan samalla tavalla kuin.
sähkömoottori tasavirta itsenäisellä stimulaatiolla
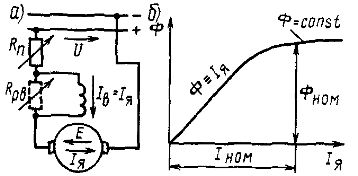
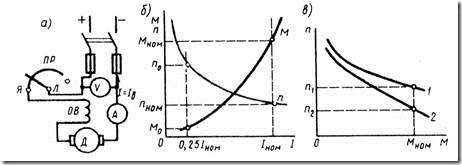
Tässä sähkömoottorissa (kuva 1, a) ankkurikäämitys on kytketty päätasavirtalähteeseen (DC-verkko, generaattori tai tasasuuntaaja) jännitteellä U, ja virityskäämi on kytketty apulähteeseen, jossa on jännite UB. Ohjausreostaatti Rrv sisältyy herätekäämipiiriin ja käynnistysreostaatti Rn ankkurikäämipiiriin.
Säätöreostaatilla säädellään moottorin ankkurin pyörimisnopeutta ja käynnistysreostaattia käytetään rajoittamaan ankkurikäämin virtaa käynnistyksen aikana. ominaispiirre sähkömoottori on, että sen viritysvirta Iv ei riipu ankkurikäämin virrasta Ii (kuormitusvirta). Siksi ankkurireaktion demagnetoivan vaikutuksen huomioimatta voidaan likimäärin olettaa, että moottorin vuo Ф ei riipu kuormituksesta. Sähkömagneettisen vääntömomentin M ja pyörimisnopeuden n riippuvuudet virrasta Il ovat lineaarisia (kuva 2, a). Näin ollen myös moottorin mekaaninen ominaisuus on lineaarinen - riippuvuus n (M) (Kuva 2, b).
Jos ankkuripiirissä ei ole reostaattia, jonka vastus on Rn, nopeus ja mekaaniset ominaisuudet ovat jäykkiä, eli pienellä kaltevuuskulmalla vaaka-akseliin nähden, koska jännitehäviö IаΣRя ankkuripiiriin kuuluvissa koneen käämeissä nimelliskuorma on vain 3-5 % Unomista. Näitä ominaisuuksia (suorat viivat 1 kuvassa 2, a ja b) kutsutaan luonnollisiksi. Kun ankkuripiiriin sisällytetään reostaatti, jonka vastus on Rn, näiden ominaisuuksien kaltevuus kasvaa, minkä seurauksena on mahdollista saada reostaattiominaisuuksien 2, 3 ja 4 perhe, joka vastaa erilaisia merkityksiä Rn1, Rn2 ja Rn3.
Riisi. 1. Sähkömoottoreiden kaaviot tasavirta riippumattomalla (a) ja rinnakkaisella (b) virityksellä
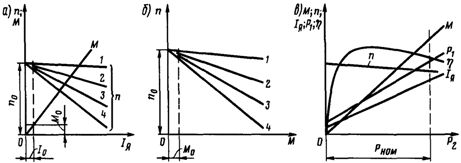
Riisi. 2. Sähkömoottorien ominaisuudet tasavirta itsenäisellä ja rinnakkaisvirityksellä: a - suuri nopeus ja vääntömomentti, b - mekaaninen, c - työskentely enemmän vastustusta Rn, mitä suurempi kaltevuuskulma reostaattisella ominaisuudella on, eli sitä pehmeämpi se on.
Säätöreostaatti Rpv mahdollistaa moottorin herätevirran Ib ja sen magneettivuon Ф muuttamisen, jolloin myös pyörimisnopeus n muuttuu.
Virityskäämipiiriin ei ole asennettu kytkimiä ja sulakkeita, koska kun tämä piiri katkeaa, sähkömoottorin magneettivuo vähenee jyrkästi (vain jäännösmagnetismin vuo jää siihen) ja tapahtuu hätätila. Jos sähkömoottori käy tyhjäkäynnillä tai pienellä akselin kuormituksella, nopeus kasvaa jyrkästi (moottori käy villi). Tässä tapauksessa ankkurikäämin Ia virta kasvaa suuresti ja voi tapahtua yleispalo. Tämän välttämiseksi suojan on irrotettava moottori virtalähteestä.
Pyörimisnopeuden jyrkkä nousu, kun virityskäämin piiri katkeaa, selittyy sillä, että tässä tapauksessa magneettivuo Ф pienenee jyrkästi (jäännösmagnetismin Fost-vuon arvoon) ja e. d.s. E ja nykyinen Iya kasvavat. Ja koska käytetty jännite U pysyy muuttumattomana, pyörimisnopeus n kasvaa e asti. d.s. E ei saavuta arvoa, joka on suunnilleen yhtä suuri kuin U (joka on välttämätön tasapainotilalle virtapiiri ankkurit, joissa E= U - IаΣRя.
Kun akselin kuormitus on lähellä nimellisarvoa, sähkömoottori pysähtyy herätepiirin katketessa, koska sähkömagneettinen momentti, jonka moottori voi kehittää magneettivuon merkittävällä laskulla, pienenee ja tulee pienemmäksi kuin akselin kuormitusmomentti. Tässä tapauksessa myös virta Ia kasvaa jyrkästi ja kone on irrotettava virtalähteestä.
On huomattava, että pyörimisnopeus n0 vastaa ihanteellista joutokäyntiä, kun moottori ei kuluta sähköä verkosta ja sen sähkömagneettinen vääntömomentti on nolla. Todellisissa olosuhteissa, joutokäyntitilassa, moottori kuluttaa verkosta joutokäyntivirran I0, joka on tarpeen kompensoimaan sisäisiä menetyksiä tehoa ja kehittää tietyn momentin M0, joka tarvitaan koneen kitkavoimien voittamiseksi. Siksi todellisuudessa tyhjäkäyntinopeus on pienempi kuin n0.
Pyörimisnopeuden n ja sähkömagneettisen vääntömomentin M riippuvuus moottorin akselin tehosta P2 (kuva 2, c), kuten tarkasteluista suhteista seuraa, on lineaarinen. Myös ankkurikäämin virran Iya ja tehon P1 riippuvuudet P2:sta ovat lähes lineaarisia. Virta Ia ja teho P1 kohdassa P2 = 0 ovat tyhjäkäyntivirtaa I0 ja tehoa P0, joka kuluu tyhjäkäynnillä. Hyötysuhdekäyrällä on kaikille sähkökoneille yhteinen luonne.
sähkömoottori tasavirta rinnakkaisella virityksellä
Tässä sähkömoottorissa (katso kuva 1, b) kenttä- ja ankkurikäämit saavat tehonsa samasta sähköenergian lähteestä jännitteellä U. Ohjausreostaatti Rpv sisältyy virityskäämipiiriin ja käynnistysreostaatti Rp. ankkurikäämipiirissä.
Tarkasteltavana olevassa sähkömoottorissa lähinnä erilliset ateriat ankkurin ja virityskäämien piirit, minkä seurauksena herätevirta Iv ei riipu ankkurikäämin Iv virrasta. Siksi rinnakkain viritetyllä moottorilla on samat ominaisuudet kuin itsenäisesti viritetyllä moottorilla. Rinnakkaisherätetty moottori toimii kuitenkin kunnolla vain silloin, kun se saa virtansa vakiojännitteisestä tasavirtalähteestä.
Kun sähkömoottori saa virtaa muuttuvajännitelähteestä (generaattori tai ohjattu tasasuuntaaja), syöttöjännitteen U lasku aiheuttaa vastaavan pienenemisen herätevirrassa Iv ja magneettivuossa F, mikä johtaa ankkurikäämin kasvuun. nykyinen Ia. Tämä rajoittaa kykyä ohjata ankkurin nopeutta muuttamalla syöttöjännitettä U. Siksi sähkömoottorit, jotka on suunniteltu toimimaan generaattorilla tai ohjatulla tasasuuntaajalla, on viritettävä itsenäisesti.
sähkömoottori tasavirta peräkkäisellä virityksellä
Käynnistysvirran rajoittamiseksi ankkurikäämipiirissä on käynnistysreostaatti Rp (kuva 3, a) ja nopeuden ohjaamiseksi säätöreostaatti Rrv voidaan kytkeä rinnan virityskäämin kanssa.
Riisi. 3. Sähkömoottorin kaavio tasavirta sarjavirityksellä (a) ja sen magneettivuon Ф riippuvuudella ankkurikäämin (b) virrasta Iа
Riisi. 4. Sähkömoottorin ominaisuudet tasavirta peräkkäisellä herätyksellä: a - suuri nopeus ja vääntömomentti, b - mekaaninen, c - työntekijät.
Tälle sähkömoottorille on ominaista, että sen viritysvirta Iv on yhtä suuri tai verrannollinen (kun reostaatti Rpv on päällä) ankkurin käämivirtaan Ia, joten magneettivuo Ф riippuu moottorin kuormituksesta (kuva 3, b). ).
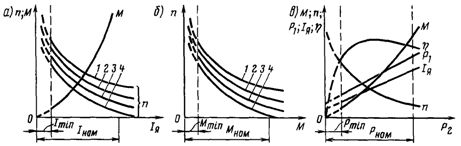
Ankkurin käämivirralla I, vähemmän (0,8-0,9) nimellisvirta Koneen magneettijärjestelmä ei ole kyllästynyt ja voidaan olettaa, että magneettivuo Ф muuttuu suoraan suhteessa virtaan Iа. Siksi sähkömoottorin nopeusominaisuus on pehmeä - virran kasvaessa Ith pyörimistaajuus n laskee jyrkästi (kuva 4, a). Pyörimisnopeuden n lasku johtuu jännitehäviön IяΣRя kasvusta. sisään sisäinen vastus Rya. ankkurikäämityspiireistä sekä magneettivuon F lisääntymisestä.
Sähkömagneettinen momentti M virran Ia kasvaessa kasvaa jyrkästi, koska tällöin myös magneettivuo F kasvaa, eli momentti M on verrannollinen virtaan Ia. Siksi virralla Ia, joka on pienempi kuin (0,8 N-0,9) Inom, nopeuskäyrä on hyperabelin muotoinen ja momenttiominaisuus on paraabelin muotoinen.
Virroilla Il > Inom M:n ja n:n riippuvuudet Il:stä ovat lineaarisia, koska tässä tilassa magneettipiiri kyllästyy ja magneettivuo Ф ei muutu virran Il muuttuessa.
Mekaaninen ominaisuus, eli n:n riippuvuus M:stä (kuva 4, b), voidaan rakentaa n:n ja M:n riippuvuuksien perusteella Ib:stä. Luonnollisen ominaiskäyrän 1 lisäksi on mahdollista saada reostaattiominaisuuksien perhe 2, 3 ja 4 sisällyttämällä ankkurikäämityspiiriin reostaatti, jonka resistanssi on Rp. Nämä ominaisuudet vastaavat Rn1:n, Rn2:n eri arvoja. ja Rn3, kun taas mitä suurempi Rn, sitä pienempi ominaiskäyrä.
Tarkasteltavan moottorin mekaaniset ominaisuudet ovat pehmeät ja luonteeltaan hyperboliset. Pienillä kuormituksilla magneettivuo Ф pienenee suuresti, pyörimisnopeus n kasvaa jyrkästi ja voi ylittää suurimman sallitun arvon (moottori loppuu vaihteesta). Siksi tällaisia moottoreita ei voida käyttää joutokäynnillä ja alhaisella kuormituksella toimivien mekanismien ohjaamiseen (erilaiset työstökoneet, kuljettimet jne.).
Yleensä minimaalista sallittu kuorma suuri- ja keskitehoisille moottoreille on (0,2 .... 0,25) Inom. Jotta moottori ei käy ilman kuormitusta, se on kytketty jäykästi käyttömekanismiin (vaihde- tai sokeakytkin), hihnavedon tai kitkakytkimen käyttöä ei voida hyväksyä.
Tästä haittapuolesta huolimatta sarjaherätettyjä moottoreita käytetään laajalti, erityisesti missä kuormitusmomentissa on suuria muutoksia ja käynnistysolosuhteissa on vaikeita: kaikissa vetokäytöissä (sähköveturit, dieselveturit, sähköjunat, sähköautot, sähkötrukit jne.), sekä kuormannostomekanismien käyttöjärjestelmissä (nosturit, hissit jne.).
Tämä selittyy sillä, että pehmeällä ominaisuudella kuormitusmomentin kasvu johtaa pienempään virran- ja tehonkulutuksen lisäykseen kuin moottoreissa, joissa on riippumaton ja rinnakkainen heräte, joten sarjaherätetyt moottorit sietävät ylikuormituksia paremmin. Lisäksi näillä moottoreilla on suuri käynnistysmomentti kuin moottoreilla, joissa on rinnakkainen ja riippumaton heräte, koska ankkurin käämivirran kasvaessa käynnistyksen yhteydessä magneettivuo kasvaa vastaavasti.
Jos hyväksymme esimerkiksi sen, että lyhytaikainen käynnistysvirta voi olla 2 kertaa koneen nimelliskäyttövirta ja jättää huomiotta kyllästymisen vaikutus, ankkurireaktio ja jännitteen pudotus sen käämin piirissä, niin sarjaheräteellä varustetussa moottorissa käynnistysmomentti on 4 kertaa suurempi kuin nimellisarvo (Sekä virta- että magneettivuo kasvaa 2 kertaa) ja moottoreissa, joissa on riippumaton ja rinnakkainen heräte - vain 2 kertaa enemmän.
Todellisuudessa magneettipiirin kyllästymisestä johtuen magneettivuo ei kasva suhteessa virtaan, mutta silti sarjaherätetyn moottorin käynnistysmomentti, kun kaikki muut asiat ovat samat, on huomattavasti suurempi kuin käynnistysmomentti samasta moottorista riippumattomalla tai rinnakkaisella virityksellä.
n:n ja M:n riippuvuudet moottorin akselin tehosta P2 (kuva 4, c), kuten yllä olevista määräyksistä seuraa, ovat epälineaarisia, P1:n, Ip:n ja η:n riippuvuudet P2:sta ovat saman muotoisia kuin moottorit rinnakkaisella virityksellä.
sähkömoottori tasavirta sekavalla jännityksellä
Tässä sähkömoottorissa (kuva 5, a) magneettivuo Ф syntyy kahden virityskäämin - rinnakkaisen (tai itsenäisen) ja sarjan - yhteistoiminnan seurauksena, joiden läpi herätevirrat Iv1 ja Iv2 \u003d Ib
Siksi
![]()
missä Фposl on sarjakäämin magneettivuo virrasta Il riippuen, Фpar on rinnakkaiskäämin magneettivuo, joka ei riipu kuormituksesta (määritetty herätevirran Iв1 mukaan).
Sekaheräteisen sähkömoottorin mekaaninen ominaisuus (kuva 5, b) sijoittuu rinnakkaisen (suora viiva 1) ja sarjaherätyksen (käyrä 2) moottoreiden ominaisuuksien väliin. Riippuen rinnakkais- ja sarjakäämien magnetomotoristen voimien suhteesta nimellistilassa, sekaheräteisen moottorin ominaisuudet voidaan lähentää ominaisuuteen 1 (käyrä 3 sarjakäämin alhaisella ppm:llä) tai ominaiskäyrään. 2 (käyrä 4 pienelle ppm:lle).
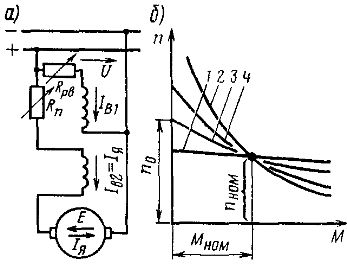
Riisi. 5. Kaavio sähkömoottorista, jossa on sekoitettu heräte (a) ja sen mekaaniset ominaisuudet (b)
Moottorin etu tasavirta sekaheräteellä on se, että sillä on pehmeä mekaaninen ominaisuus, se voi toimia tyhjäkäynnillä, kun Fposl = 0. Tässä tilassa sen ankkurin pyörimistaajuus määräytyy magneettivuon Фpar mukaan ja sen arvo on rajoitettu (moottori ei käy villi).
[asiakirja]1.doc
Kotitehtävä nro 2(moduuli 5)
"Tasavirtamoottori sarjavirityksellä. Elementtien antaminen. Toimintaperiaate"
gr.TP-07
Asmolkova O. A.
I lukukausi 2009
DC-moottori sarjavirityksellä. Elementtien antaminen. Toimintaperiaate
1. Tasavirtamoottorin elementtien laite ja käyttötarkoitus
.
DC moottori - sähkökone , DC kone, muuttaa sähköenergiaa DC sisään mekaaninen energia. Se koostuu, kuten kaikki DC-koneet, kiinteästä staattorista, jossa on navat, ja pyörivästä roottorista (ankkuri), jossa on kollektori.
staattori Tasavirtakone koostuu sylinterimäisestä rungosta (kotelosta), virityskäämityksellä varustetuista napoista ja päätykilpeistä ( riisi. 2.1.). Sängyssä pää (pää) navat on vahvistettu herättämään päämagneettivuo ja lisänapat parantamaan moottorin kytkentää. Pääpylväs koostuu teräslevystä tehdystä runkoon pultattavasta napaytimestä ja virityskelasta. Vapaassa päässä oleva sydän on varustettu napakappaleella, jotta saadaan aikaan tarvittava magneettisen induktion jakautuminen ankkurin kehälle. sänky 3 on koneen ike, eli osa, joka sulkee päävuon Ф magneettipiirin. Se on valmistettu valuteräksestä, koska siinä oleva magneettivuo on suhteellisen vakio. Lisäpylväät asennetaan runkoon pääpylväiden väliin. Niiden käämitys on kytketty sarjaan ankkurikäämin kanssa. Näiden napojen tarkoitus on luoda ylimääräinen magneettikenttä. Tämä on välttämätöntä, jotta keräimen harjat eivät kipinä.
Ankkuri (roottori) kutsutaan koneen osaksi, jonka käämissä se pyörii suhteessa pääosaan magneettikenttä EMF indusoituu. Ankkuri 5 Tasavirtamoottori koostuu teräsakselista, teräksestä hammastetusta sydämestä, sen uriin sijoitetusta käämityksestä ja ankkurin akselille asennetusta kollektorista ( riisi. 2.1.). Kenttäkäämit ovat välttämättömiä optimaalisen vuorovaikutuksen varmistamiseksi roottorin ja staattorin magneettikenttien välillä (ts. maksimi hetki roottorilla). moottorin tyypillinen osa (tai mikä tahansa sähkökone) DC on keräin. Tämä on ontto sylinteri, joka on koottu toisistaan eristetyistä kiilamaisista kuparilevyistä. Jakotukin levyt on myös eristetty moottorin akselista. Ne on yhdistetty johtimilla ankkurin uriin sijoitettuihin käämikierteisiin. Pyörivä käämi on kytketty ulkoiseen piiriin harjojen ja kommutaattorin välisellä liukukoskettimella. Tasavirtakoneiden kollektori toimii tasasuuntaamaan pyörivään ankkurikäämiin indusoituvaa muuttuvaa EMF:ää ja aikaansaamaan vakio sähkömagneettinen momentti suunnassa.
Riisi. 2. 1. DC-moottorilaite:
1 - herätekäämitys;2 - pylväät;3 - sänky;4 - tangon kärki;5 - ankkuri;6 - ankkurikäämin johtimet;
7 - hammastettu ankkuriydin;8 - koneen ilmarako
2. DC-moottorin toimintaperiaate
2.1 Yleistä
Kun ankkurikäämi pyörii kiinteässä magneettikentässä, siihen indusoituu muuttuva EMF, joka muuttuu taajuuden mukaan:
Missä n- ankkurin pyörimisnopeus.
Kun ankkuri pyörii, muuttuva EMF toimii ankkurikäämin kahden pisteen välillä. Kiinteiden kosketusharjojen välillä vaikuttaa kuitenkin EMF-vakio suuruus- ja suuntavakio E, joka on yhtä suuri kuin kaikkien näiden harjojen välissä olevan ankkurin sarjaan kytkettyjen kierrosten aiheuttamien EMF-arvojen summa.
EMF-riippuvuus E koneen magneettivuosta ja ankkurin pyörimisnopeudesta on muotoa:
Kun ankkurikäämi kytketään verkkoon, jossa on jännite U, EMF E on suunnilleen yhtä suuri kuin jännite U ja roottorin nopeus:
Siksi kollektorin läsnäolon vuoksi, kun tasavirtakone toimii moottoritilassa, roottorin nopeus ei ole tiukasti sidoksissa verkkotaajuuteen, vaan se voi vaihdella laajalla alueella jännitettä muuttamalla. U ja magneettivuo F. Tasavirtakoneen navat erottavaa symmetria-akselia kutsutaan sen geometriseksi neutraaliksi.
Avoimella ulkoisella piirillä virta ankkurikäämissä ei kulje, koska ankkurikäämin kahdessa osassa, jotka sijaitsevat geometrisen nollan molemmilla puolilla, indusoituneet EMF on suunnattu vastakkain ja kompensoivat toisiaan. Suurimman jännitteen syöttämiseksi ankkurikäämistä ulkoiseen piiriin, tämä piiri on kytkettävä kahteen ankkurikäämin pisteeseen, joiden välillä toimii suurin potentiaaliero ja joihin harjat tulisi asentaa. Kun ankkuri pyörii, pisteet siirtyvät geometrisesta neutraalista, mutta yhä useammat uudet käämityspisteet lähestyvät harjoja, joiden välissä EMF toimii E, joten ulkoisen piirin EMF:n suuruus ja suunta eivät muutu. EMF-aaltoilun vähentämiseksi harjojen siirtyessä yhdestä keräinlevystä toiseen, jokaiseen ankkurikäämin rinnakkaiseen haaraan sisältyy yleensä vähintään 16 aktiivista johdinta.
Ankkuriin, jonka käämin läpi virta kulkee minä, sähkömagneettinen momentti vaikuttaa:
Kun kone on käynnissä moottoritilassa, sähkömagneettinen vääntömomentti pyörii.
2.2 DC-moottorin ankkurireaktio
Tyhjäkäynnillä vain HC luo magneettivuon moottorissa ^F virityskäämeissä. Tässä tapauksessa magneettivuo F sisään kun ankkurin ja pääpylvään sydämen välissä on vakio ilmarako (joka on tyypillistä monille tasavirtakoneille), se jakautuu symmetrisesti koneiden pituusakseliin nähden.
Kun kone toimii kuormitettuna, virta kulkee ankkurikäämin läpi ja ankkurin NS luo oman magneettikentän. Ankkurin kentän vaikutusta koneen magneettikenttään kutsutaan ankkurireaktio. magneettinen virtaus F aq luonut na anchor F aq kaksinapaisessa koneessa, kun harjat asennetaan vapaalle, se suunnataan pitkin poikittaisakseli koneita, joten ankkurin magneettikenttää kutsutaan poikittaiseksi. Virtauksen seurauksena F aq koneen magneettikentän symmetrinen jakautuminen vääristyy ja siitä johtuva vuo F leikata on keskittynyt pääasiassa päänapojen reunoihin. Tässä tapauksessa fyysinen neutraali b-b(viiva, joka yhdistää ne ankkuriympyrän pisteet, joissa induktio on nolla) on siirtynyt suhteessa geometriseen neutraali a-a johonkin kulmaan β (kuva 2.2). Moottoreissa fyysinen neutraali on siirtynyt pyörimissuuntaa vastaan.
Lain perusteella täysi virta NS-ankkuri, joka toimii ilmavälissä etäisyydellä x päänapojen akselista, määritetään lausekkeella:
Siksi NS-ankkurit F aq vaihtelee lineaarisesti sen kehällä; pääpylvään keskellä se on yhtä suuri kuin nolla, ja kohdissa, joihin harjat on asennettu, sillä on maksimiarvo. Magneettinen induktio ilmassa
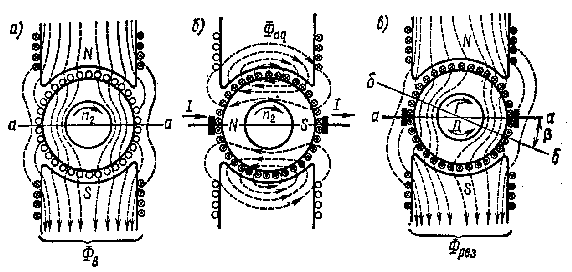
^ Kuva 2.2 - DC-moottorin magneettikenttä: a) virityskäämistä; b) ankkurikäämityksestä; c) tuloksena (F sisään - magneettivuo x.x:ssä; F aq - NS-ankkurin luoma magneettivuo; F leikata - tuloksena oleva virta; a-a - geometrinen neutraali; b-b - fyysinen neutraali; β – neutraali siirtymäkulma b-b)
Välys tyydyttymättömällä magneettijärjestelmällä:
Missä on ilmaraon arvo pisteessä x.
2.3 DC-moottorin vääntömomentti
Jos moottorin kenttäkäämi ja ankkuri on kytketty DC-verkkoon jännitteellä ^U silloin on sähkömagneettinen vääntömomentti M Em. Hyödyllinen vääntömomentti M moottorin akselilla on pienempi kuin sähkömagneettinen kitkavoimien koneeseen luoman vastamomentin arvon verran ja yhtä suuri kuin momentti M X x.x-tilassa, ts. M = M Em -M X .
Käynnistysmomentti moottorin on oltava suurempi kuin staattinen jarru M t roottorin lepotilassa, muuten moottorin ankkuri ei ala pyörimään. Vakaassa tilassa (n = const) pyörivien M- ja jarrutusmomenttien M t tasapaino on olemassa:
M = M Em – M X = M t
Mekaniikasta tiedetään, että mekaaninen voima moottori voidaan ilmaista vääntömomentilla ja kulmanopeudella
Siksi moottorin hyödyllinen vääntömomentti ^M(N m) nettotehona ilmaistuna R(kW) ja nopeus n(rpm),
M = 9550 P/n
Keskustellaan joistakin tärkeistä DC-moottoreiden käynnistämiseen ja käyttöön liittyvistä asioista. Moottorin sähköisen tilan yhtälöstä seuraa, että
minä minä = (U - E)/R minä
Toimintatilassa ankkurivirta I I on rajoitettu esim. d.s. E, jos n on suunnilleen yhtä suuri kuin n nom. Käynnistyshetkellä n = 0, e. d.s. E = 0 ja käynnistysvirta minä P = U/ R minä 10-30 kertaa enemmän kuin nimellinen. Siksi moottorin suoraa käynnistämistä, ts. ankkurin suoraa kytkemistä verkkojännitteeseen, ei voida hyväksyä. Ankkurin korkean käynnistysvirran rajoittamiseksi käynnistysreostaatti kytketään sarjaan ankkurin kanssa ennen käynnistystä. R P pienellä vastuksella. Tässä tapauksessa milloin E = O
minä P =U/(R minä - R P ) << U/R minä
Reostaatin vastus RP valitaan sallitun ankkurivirran mukaan.
Kun moottori kiihtyy nimellisnopeuteen e. d.s. E kasvaa ja virta pienenee ja käynnistysreostaatti poistetaan asteittain ja kokonaan (käynnistysreostaatti lasketaan lyhytaikaista päällekytkentää varten). Säädettävä reostaatti R reg virityspiirissä, jolla on suhteellisen korkea resistanssi (kymmeniä ja satoja ohmeja), se poistetaan ennen moottorin käynnistämistä kokonaan niin, että käynnistyksen yhteydessä viritysvirta ja staattorin magneettivuo F olivat nimellisiä. Tämä lisää käynnistysmomenttia, mikä varmistaa moottorin nopean ja helpon kiihdytyksen.
Käynnistyksen ja kiihdytyksen jälkeen tapahtuu moottorin tasainen toiminta, jossa akselin jarrutusmomentti ^ Mt tasapainotetaan moottorin kehittämän hetken mukaan M Em , eli M Em == M t ( klo n = const. )
DC-moottorit voivat palauttaa jarrutusmomentin muutoksen häiritsemän vakaan toimintatilan, eli ne voivat kehittää vääntömomenttia M, yhtä suuri kuin uusi jarrutusmomentin arvo M t vastaavasti uudella nopeudella n".
Todellakin, jos kuorman M t jarrutusmomentti on suurempi kuin moottorin vääntömomentti M Em, niin ankkurin nopeus laskee. Vakiojännitteellä U ja virtaa F tämä aiheuttaa laskun. d.s. E ankkuri lisää ankkurin virtaa ja vääntömomenttia, kunnes saavutetaan tasapaino, jossa M Em = M t ja n" < n. Kun jarrutusmomentti pienennetään arvoon M t, steady-state -toimintatila asettuu vastaavasti M Em = M t" ja n"> n" . Näin ollen tasavirtamoottoreilla on itsesäätelyominaisuus - voi kehittää vääntömomentin, joka on yhtä suuri kuin jarrutusmomentti.
2.4 Taajuussäätö
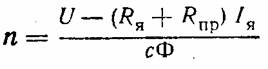
Tasavirtamoottorin ankkurin nopeus määräytyy sähköisen tilayhtälön perusteella U= ER minä minä minä sen jälkeen, kun on korvattu e. d.s. E = sfn:

Ankkurin jännitehäviö R minä minä minä pieni: nimelliskuormalla se ei ylitä 0,03 - 0,07 U nom .
Näin ollen tasavirtamoottorin nopeus on suoraan verrannollinen syötettyyn verkkojännitteeseen ja kääntäen verrannollinen staattorin magneettivuon . Moottorin nopeutta voidaan säätää kahdella tavalla: muuttamalla staattorin vuota F tai moottoriin syötettyä jännitettä U. Nopeudensäätö koneen magneettikenttää muuttamalla tapahtuu moottorin virityspiirissä olevalla säätöreostaatilla. Moottoriin syötettyä jännitettä muutetaan säätämällä lähdejännitettä.
Voit lisätä ylimääräisen reostaatin ankkuripiiriin. Tässä tapauksessa käynnistysreostaatti korvataan liitäntälaitteella R jne Tällainen reostaatti suorittaa sekä käynnistysreostaatin että säätöreostaatin toimintoja. Tässä tapauksessa DC-moottorin ankkurin pyörimistaajuusyhtälöllä on muoto
Tästä seuraa, että moottorin kierrosluvun säätö voidaan suorittaa muuttamalla verkkojännitettä, liitäntälaitteen reostaatin vastusta tai staattorivirtaa.
Moottorin suunnanvaihto. Moottorin vääntömomenttiyhtälöstä M Em = kFminä minä tästä seuraa, että kääntäminen, eli ankkurin pyörimissuunnan muuttaminen, voidaan suorittaa muuttamalla virityskäämin (virtauksen) suuntaa F) tai ankkurivirtaa.
Moottorin kääntämiseksi "liikkeellä" ankkurivirran suuntaa muutetaan (vaihtamalla ankkurijohdot), eikä virityskäämiä kytketä, koska sillä on suuri induktanssi ja sen piirin katkaiseminen virralla ei ole hyväksyttävää. Irrotetun moottorin kääntäminen tapahtuu myös muuttamalla virran suuntaa kenttäkäämissä (vaihtamalla sen lähtöjä).
3. Moottori sarjavirityksellä
Moottorissa, jossa on sarjaheräte ( kuva 2.3a) herätevirta on yhtä suuri kuin ankkurivirta: minä sisään = minä a, joten magneettivuo Ф on kuormitusvirran funktio minä a. Tämän toiminnon luonne vaihtelee kuormituksen suuruuden mukaan. klo minä a <(0,8...0,9) I nom kun magneettinen järjestelmä on tyydyttymätön, f=k f minä a, ja suhteellisuuskerroin Vastaanottaja f merkittävällä kuormitusalueella pysyy lähes vakiona. Kun kuormitus kasvaa edelleen, virtaus F kasvaa hitaammin kuin minä a > minä nom) voimme olettaa sen F=vakio. Tämän mukaisesti myös riippuvuudet muuttuvat. n=f(I a ), M=f(I a) (riisi. 2.3.b).
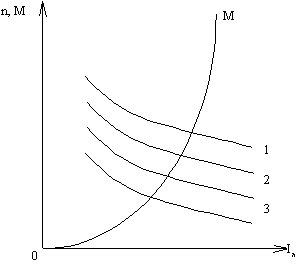
Riisi. 2.3. - a) moottorin kaavio peräkkäisellä herätyksellä; b) sen vääntömomentin ja pyörimisnopeuden riippuvuus ankkurivirrasta (I minä – ankkurivirta; minä sisään – viritysvirta;r n
- kuormituskestävyys;
n- pyörimisnopeus; yksi - luonnollinen ominaisuus; 2,3 - reostaattiset ominaisuudet, jotka vastaavat lisävastuksen r eri arvoja n ).
Luonnollisten ominaisuuksien 1 lisäksi on mahdollista saada reostaattisten ominaisuuksien perhe 2, 3 ja 4 sisällyttämällä ankkuripiiriin lisävastuksia r n. Mitä suurempi r n:n arvo, sitä pienempi ominaisuus on.
Pienillä kuormituksilla nopeus n kasvaa jyrkästi ja voi ylittää suurimman sallitun arvon (moottori menee "väliin"). Siksi tällaisia moottoreita ei voida käyttää mekanismeihin, jotka toimivat joutokäynnillä ja alhaisella kuormituksella.
Jäykällä ominaisuudella pyörimisnopeus n ei melkein riipu hetkestä M, joten teho:
![]() , missä FROM 4
- vakio.
, missä FROM 4
- vakio.
Moottorin pehmeällä ominaisuudella n on kääntäen verrannollinen, minkä seurauksena:
![]() , missä on vakio.
, missä on vakio.
Siksi, kun kuormitusmomentti muuttuu laajalla alueella, teho R 2 , ja siksi voima R 1 ja nykyinen minä a muutos sarjaherätetyillä moottoreilla vähemmän kuin rinnakkaisherätteellä, lisäksi ne sietävät paremmin ylikuormituksia.
Tässä moottorissa kenttäkäämitys on kytketty sarjaan ankkuripiiriin (kuva 29.9, a), siksi magneettinen virtausF se riippuu kuormitusvirrasta I = I a = I sisään . Pienillä kuormilla koneen magneettijärjestelmä ei kyllästy ja magneettivuon riippuvuus kuormitusvirrasta on suoraan verrannollinen, ts. F = k f I a (k f- suhteellisuuskerroin). Tässä tapauksessa löydämme sähkömagneettisen momentin:
Pyörimistaajuuden kaava saa muodon
 . (29.15)
. (29.15)
Kuvassa 29.9, b suorituskykytiedot esitetään M = F(I) ja n = (I) sarjan herätemoottori. Suurilla kuormituksilla moottorin magneettinen järjestelmä kyllästyy. Tässä tapauksessa magneettivuo ei käytännössä muutu kuormituksen kasvaessa, ja moottorin ominaisuudet muuttuvat melkein suoraviivaisiksi. Sarjaherätysmoottorin nopeuskäyrä osoittaa, että moottorin nopeus muuttuu merkittävästi kuormituksen muuttuessa. Tätä ominaisuutta kutsutaan pehmeä.
Riisi. 29.9. Jaksottainen herätemoottori:
a- piirikaavio; b- suorituskykyominaisuudet; c - mekaaniset ominaisuudet; 1 - luonnollinen ominaisuus; 2 - keinotekoinen ominaisuus
Kun peräkkäisen viritysmoottorin kuormitus pienenee, pyörimisnopeus kasvaa jyrkästi ja alle 25%:n kuormituksella nimellisarvosta se voi saavuttaa arvot, jotka ovat vaarallisia moottorille ("ylivirtaus" ”). Siksi sarjaviritysmoottorin toimintaa tai sen käynnistämistä akselikuormalla alle 25 % nimellisarvosta ei voida hyväksyä.
Luotettavamman toiminnan takaamiseksi peräkkäisen viritysmoottorin akseli on kytkettävä jäykästi työmekanismiin kytkimen ja vaihteen avulla. Hihnakäytön käyttöä ei voida hyväksyä, koska jos hihna katkeaa tai nollataan, moottori voi "lopeta". Koska moottoria on mahdollista käyttää suuremmilla nopeuksilla, sarjaherätysmoottoreita testataan GOST:n mukaan 2 minuutin ajan ylittääkseen nopeuden 20% tehdaskilvessä ilmoitetun maksimin yläpuolella, mutta vähintään 50% nimellisarvon yläpuolella.
Mekaaniset ominaisuudet sarjan herätemoottori n=f(M) esitetään kuvassa. 29.9, sisään. Mekaanisten ominaisuuksien jyrkästi laskevat käyrät ( luonnollinen 1 ja keinotekoinen 2 ) tarjoavat peräkkäisen viritysmoottorin vakaan toiminnan missä tahansa mekaanisessa kuormituksessa. Näiden moottoreiden ominaisuus kehittää suuri vääntömomentti, joka on verrannollinen kuormitusvirran neliöön, on tärkeä varsinkin vaikeissa käynnistysolosuhteissa ja ylikuormituksen aikana, koska moottorin kuormituksen asteittaisen kasvaessa sen sisääntulon teho kasvaa hitaammin. kuin vääntömomentti. Tämä sarjaherätysmoottoreiden ominaisuus on yksi syy siihen laaja sovellus vetomoottoreina liikenteessä, samoin kuin nosturimoottoreina nostolaitteistoissa, eli kaikissa sähkökäytössä vaikeissa käynnistysolosuhteissa ja moottorin akseliin kohdistuvien merkittävien kuormien yhdistelmässä alhaisella nopeudella.
Sarjaherätysmoottorin nimellisnopeuden muutos
 , (29.16)
, (29.16)
missä n - pyörimisnopeus moottorin kuormituksella 25 % nimellisarvosta.
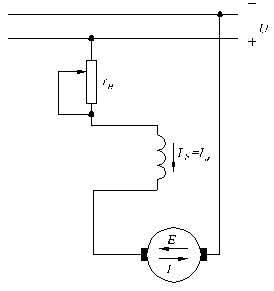
Sarjaherätysmoottoreiden pyörimisnopeutta voidaan ohjata muuttamalla jompaakumpaa jännite U, tai virityskäämin magneettivuo. Ensimmäisessä tapauksessa säätö reostaatti R rg (Kuva 29.10, a). Kun tämän reostaatin vastus kasvaa, jännite moottorin tulossa ja sen pyörimistaajuus laskevat. Tätä ohjausmenetelmää käytetään pääasiassa pienitehoisissa moottoreissa. Suuren moottorin tehon tapauksessa tämä menetelmä on epätaloudellinen suurten energiahäviöiden vuoksi R rg . Sitä paitsi, reostaatti R rg , laskettuna moottorin käyttövirralla, se osoittautuu hankalaksi ja kalliiksi.
Kun useita samantyyppisiä moottoreita työskentelee yhdessä, pyörimisnopeutta säädetään muuttamalla niiden sisällyttämiskaaviota toisiinsa nähden (kuva 29.10, b). Joten kun moottorit kytketään rinnan, jokainen niistä on täydessä verkkojännitteessä, ja kun kaksi moottoria on kytketty sarjaan, kukin moottori vastaa puolet verkkojännitteestä. Suuremman määrän moottoreita samanaikaisesti käytettäessä suurempi määrä kytkentävaihtoehtoja on mahdollista. Tätä nopeudensäätömenetelmää käytetään sähkövetureissa, joihin on asennettu useita identtisiä vetomoottoreita.
Moottoriin syötettyä jännitettä on mahdollista muuttaa kun moottori saa virran tasavirtalähteestä, jossa on säädelty jännite (esimerkiksi kuvan 29.6 kaltaisen piirin mukaisesti, a). Kun moottoriin syötetty jännite laskee, sen mekaaniset ominaisuudet muuttuvat alaspäin, käytännössä muuttamatta niiden kaarevuutta (kuva 29.11).
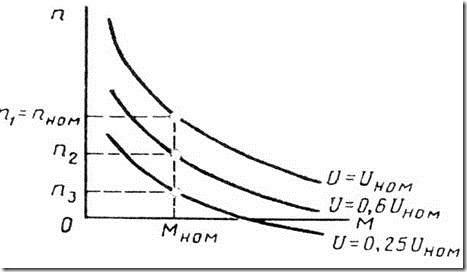
Riisi. 29.11. Sarjaviritysmoottorin mekaaniset ominaisuudet tulojännitteen muutoksella
On kolme tapaa säätää moottorin nopeutta muuttamalla magneettivuoa: ohjaamalla virityskäämi reostaatilla r rg , virityskäämin leikkaus ja ankkurikäämin ohitus reostaatilla r w . Reostaatin kytkeminen päälle r rg , ohittaa virityskäämin (kuva 29.10, sisään), samoin kuin tämän reostaatin vastuksen lasku johtaa viritysvirran laskuun I in \u003d I a - I rg ja siten pyörimisnopeuden kasvuun. Tämä menetelmä on taloudellisempi kuin edellinen (katso kuva 29.10, a), käytetään useammin ja se arvioidaan säätökertoimella
 .
.
Yleensä reostaatin vastus r rg otettu niin krg >= 50 % .
Kun leikataan kenttäkäämitystä (kuva 29.10, G) käämityksen osan kierrosten sammuttamiseen liittyy pyörimisnopeuden nousu. Shuntattaessa ankkurikäämitystä reostaatilla r w (katso kuva 29.10, sisään) herätevirta kasvaa I in \u003d I a + I rg , mikä vähentää pyörimisnopeutta. Vaikka tämä säätelymenetelmä tarjoaa syvän sääntelyn, se on epätaloudellinen ja sitä käytetään hyvin harvoin.
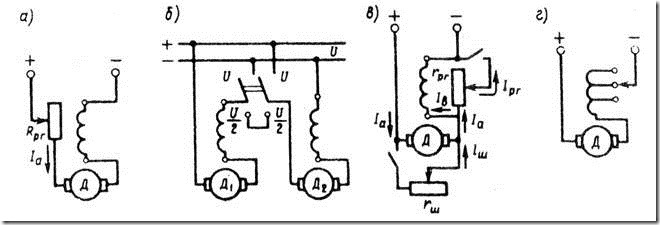
Riisi. 29.10. Sarjaherätysmoottoreiden pyörimisnopeuden säätö





