Lähetä hyvä työsi tietokanta on yksinkertainen. Käytä alla olevaa lomaketta
Opiskelijat, jatko-opiskelijat, nuoret tutkijat, jotka käyttävät tietopohjaa opinnoissaan ja työssään, ovat sinulle erittäin kiitollisia.
Isännöi osoitteessa http://www.allbest.ru/
ukrainalainen valtion akatemia rautatiekuljetukset
Tieteellisen ja käytännön koulutuksen keskus
alalta "Sähkötekniikka"
"Moottori tasavirta rinnakkaisella virityksellä
Suunnitelma
1. Esittely
2. DC-moottorin suunnittelu
3. Moottorien käynnistäminen
4. Moottorien tekniset tiedot
5. DC-moottorin ominaisuudet
6. Mekaaninen ominaisuus
7. Luettelo käytetystä kirjallisuudesta
DC-moottori (DC-moottori) on tasavirran sähköenergian muunnin mekaaniseksi energiaksi. Moottorin rakenne on esitetty kuvassa 1. Siinä on kolme pääosaa: staattori (induktori), ankkuri ja kollektori.
Induktori (1) - koneen kiinteä osa, on sähköteräksestä valmistettu ontto valuterässylinteri, johon sisällä ytimet (pylväät) kiinnitetään pulteilla. Sydämissä on virityskäämi (OB), joka on kytketty harjoihin. Induktori on suunniteltu luomaan päävirta magneettikenttä. Ankkuri (2) (koneen pyörivä sisäosa) on teräslevyistä koottu sylinteri. Ankkurin uriin asetetaan ankkurikäämi. Kerääjä (3) on kiinnitetty samalle akselille ankkurin kanssa, joka on ontto sylinteri, joka koostuu yksittäisistä kuparilevyistä (lamelleista), jotka on eristetty toisistaan ja ankkuriakselista ja on kytketty sähköisesti ankkurikäämin yksittäisiin osiin. Kerääjän tarkoitus on muuttuvien sinimuotoisten EMF:ien mekaaninen tasasuuntaus suuruudeltaan ja suunnaltaan vakiojännitteeksi, joka poistetaan ulkoiseen piiriin käyttämällä kollektorin vieressä olevia harjoja. Tasavirtamoottoreiden ominaisuudet määräytyvät pääasiassa kenttäkäämin syöttötavan mukaan. Tässä suhteessa tasavirtamoottorit luokitellaan kahteen tyyppiin: kanssa itsenäinen kiihotus(Kuva 2a) ja itseherätys (Kuva 2 b, c, d)
Virityskäämi DCT:ssä, jossa on itsenäinen heräte, saa virtansa erillisestä tasavirtalähteestä (puolijohteisesta tasasuuntaajasta, akusta tai virittimestä - DC-generaattorista).
Itseherätetyissä DCT:issä ankkuri- ja kelapiirit on kytketty sähköisesti, ts. herätekäämi saa virtansa koneen ankkurin EMF:stä.
Riippuen virtapiiri itseherätetyn koneen ankkurikäämien ja kelan kytkennät jaetaan edelleen kolmeen tyyppiin: rinnakkais-, sarja- ja sekaheräte (kuvat 2 b, c, d). DPT, kuten kaikki sähkökoneet, on käännettävä, ts. ne eivät ole merkittävää rakentavaa
muutokset voivat toimia sekä generaattorin että moottorin tilassa. DPT-toimintatila rinnakkaisherätyksellä. Harkitse DPT:n toimintaa rinnakkaisella virityksellä (kuva 2b). Kun moottori on kytketty tasavirtaverkkoon, molemmissa käämeissä syntyy virtoja. Tässä tapauksessa herätekäämissä herätevirta IB luo kelan magneettikentän.
Ankkurin virran vuorovaikutus induktorin magneettikentän kanssa luo ME:n sähkömagneettisen momentin.
ME = sFIYA, (1)
missä c on vakiokerroin;
IЯ - ankkurivirta;
Ф - magneettivuo.
ME:n sähkömagneettinen momentti eroaa moottorin akselin MW:n momentista joutokäyntihäviöiden momentin MHH arvolla, joka voidaan sen pienuuden vuoksi jättää huomiotta ja olettaa, että
Pyörivän ankkurin johtimiin indusoituu taka-EMF E:
missä n on ankkurin pyörimisnopeus;
k on vakiotekijä.
Moottorin sähköisen tasapainon yhtälö on muotoa:
U \u003d E + IЯ RY \u003d knФ + IЯ RY, (3)
jossa U on verkkojännite.
Moottorin käynnistäminen
Moottoria käynnistettäessä ankkuri on paikallaan ensimmäisellä hetkellä (n = 0) ja sille annetaan (2) ankkurin EMF E = knF = 0. Tässä tapauksessa (3) mukaan ankkurin IYaP käynnistysvirta on liian suuri, koska R on pieni ja se määritellään seuraavasti:
Siksi käynnistysvirran rajoittamiseksi käynnistysreostaatin RP resistanssi viedään sarjaan ankkuripiiriin, joka syötetään kokonaan ennen moottorin käynnistämistä ja lähetetään moottorin kiihtyessä taka-EMF:n (E) kasvaessa.
Tällainen moottorin käynnistys suojaa sen ankkurikäämiä korkeilta INP-käynnistysvirroilta ja mahdollistaa maksimaalisen magneettivuon saavuttamisen tässä tilassa.
Jos moottori käynnistetään tyhjäkäynnillä, MB:n maksimivääntömomenttia ei tarvitse kehittää akselille. Siksi moottori voidaan käynnistää lisäämällä tasaisesti syöttöjännitettä U.
Peruutusmoottori.
Moottorin pyörimissuunnan muuttaminen voidaan saavuttaa muuttamalla virtaa joko ankkurikäämissä tai kenttäkäämissä, koska. tämä muuttaa vääntömomentin etumerkkiä. Samanaikainen virran suunnan muutos molemmissa käämeissä ei muuta moottorin pyörimissuuntaa. Käämien päiden vaihto tulee suorittaa vasta, kun moottori on täysin pysähtynyt.
Säätönopeuskierto.
Lausekkeesta (3) on mahdollista määrittää moottorin pyörimisnopeus:
moottorin tasavirran syöttökäämi
Kaavasta (6) voidaan nähdä, että tasavirtamoottorin pyörimisnopeutta voidaan ohjata muuttamalla verkkojännitettä, viritysmagneettivuoa ja ankkuripiirin vastusta. Yleisin tapa ohjata moottorin pyörimisnopeutta on muuttaa magneettivuoa virityspiirissä olevan säätöreostaatin avulla.
Herätysvirran vähentäminen heikentää magneettivuoa ja lisää moottorin pyörimisnopeutta. Tämä menetelmä on taloudellinen, koska viritysvirta (rinnakkaisherätysmoottoreissa) on 3-5 % ankkurista IN, ja ohjausreostaatin lämpöhäviöt ovat hyvin pieniä. Rinnakkaisherätyksellä varustetun tasavirtamoottorin pääominaisuudet
Tasavirtamoottorin toimintaa rinnakkaisella herätyksellä arvioidaan seuraavien pääominaisuuksien perusteella:
Tyhjäkäynnin ominaisuus: (kuva 3)
n0 = ѓ (IB), jossa U = UN = const ja IЯ = I0,
missä n0 on tyhjäkäyntinopeus (ei kuormaa),
I0 - tyhjäkäyntivirta 5 - 10 % IH;
YK - nimellisarvo verkkojännite.
Ottaen huomioon, että tyhjäkäynnillä tuote IЯRЯ on pieni verrattuna U:aan, niin (6):sta moottorin nopeus määräytyy käänteissuhteen mukaan magneettivuon Ф:
Virran kasvaessa virityskäämissä magneettivuo muuttuu pitkin magnetointikäyrää Ф = ѓ (IВ), joten moottorin pyörimisnopeuden n ja herätevirran IВ välinen suhde on lähes hyperbolinen. Alhaisilla viritysvirran arvoilla kierrokset muuttuvat melkein käänteisesti. Suurilla herätevirroilla,
teräsnapojen magneettinen kylläisyys vaikuttaa ja käyrä muuttuu litteämmäksi ja kulkee lähes samansuuntaisesti abskissa-akselin kanssa. Jyrkkä muutos - herätevirran lasku sekä virityspiirin vahingossa katkennut virtapiiri kohdan (9) mukaisesti voi saada moottorin "käymään" (kun IВ > 0, ja siksi Ф pyrkii myös arvoon 0, n >?).
Mekaaninen ominaisuus. Tämä on roottorin pyörimisnopeuden riippuvuus moottorin akselin MV-momentista jatkuvalla verkkojännitteellä ja viritysvirralla:
n \u003d ѓ (MV), jossa U \u003d UH \u003d const, IВ \u003d const.
Rinnakkaisviritysmoottorille momentti MV on verrannollinen ankkurivirran IЯ ensimmäiseen asteeseen. Siksi mekaaninen ominaisuus voidaan esittää riippuvuudella n (Ib), jota kutsutaan sähkömekaaniseksi tai nopeudeksi (kuva 4).
Moottorin akseliin kohdistuu kuormitus (jarrutusmomentti). Kohdan (6) mukaan viritysvirran vakioarvoilla pyörimisnopeuden n lasku on seurausta ankkuripiirin - IЯ·RЯ - jännitehäviöstä ja ankkurireaktiosta. Kuorman kasvaessa pyörimisnopeus laskee merkityksettömän määrän, luokkaa 3-8%. Tätä nopeusominaisuutta kutsutaan jäykiksi. Säätöominaisuus (kuva 5). Tämä on viritysvirran IB riippuvuus ankkurivirrasta IA at vakiojännite verkko U ja vakio pyörimisnopeus n:
IВ \u003d ѓ (IЯ) at U \u003d UN, n \u003d const.
Ulkoisen ominaisuuden analyysistä voidaan nähdä, että pyörimisnopeus pienenee kuormituksen kasvaessa.
Ohjausominaisuuden avulla on mahdollista arvioida, kuinka, missä rajoissa on tarpeen säätää virityskäämin virtaa, jotta pyörimisnopeus pysyy vakiona.
Kokeellinen tekniikka
DPT:n toimintatilojen tutkimus rinnakkaisherätteellä suoritetaan
modulaarinen koulutuskompleksi MUK-EP1, joka koostuu:
DC-moottorin virtalähde BPP1;
Virtalähde asynkroniselle moottorille BPA1
Sähkökoneyksikkö MA1-AP.
PL073U3 (220 V, 180 W,
1500 rpm). Automaattinen moottorin käämien kytkentä ja mittauksen kytkentä
laitteet suoritetaan lohkossa BPP1.
Käytetty kuormana asynkroninen moottori(BP) -tilassa dynaaminen jarrutus. BP-käämien ja kytkennän automaattinen kytkentä mittauslaitteet se suoritetaan lohkossa BPA1.
Kompleksin toimintakaavio lohkojen kytkemisen jälkeen on esitetty kuvassa 6.
Bibliografia
1. Katsman M.M. Sähköautot. - M.: Korkeampi. koulu, 1993.
2. Kopylov I.P. Sähköautot. - M.: Energoatomizdat, 1986
Isännöi Allbest.ru:ssa
...Samanlaisia asiakirjoja
Tasavirtageneraattoreiden toimintaperiaate ja laite. Sähkömotorinen voima ja DC-generaattorin sähkömagneettinen vääntömomentti. Tasavirtageneraattoreiden viritysmenetelmät. Moottoreiden ominaisuudet ja ominaisuudet monenlaisia kiihottumista.
tiivistelmä, lisätty 12.11.2009
Tasavirtamoottoreiden nopeudensäätö muuttamalla viritysvirtaa. Sähkökäytön maksimivirtasuojaus. Moottorin nopeusominaisuudet. Tasavirtamoottoreiden ja asynkronisten moottoreiden tehopiirien kaaviot.
lukukausityö, lisätty 30.3.2014
DC-generaattorin toimintaperiaate. Ankkurikäämit ja tasavirtakoneiden viritysprosessi. Käämitys "kuolleella" osalla. Esimerkki yksinkertaisesta silmukasta ja aaltokäämityksestä. DC-moottorin kanssa peräkkäinen herätys.
esitys, lisätty 11.9.2013
Suunnittelu ja toimintaperiaate sähkökoneet tasavirta. Itsenäisen herätteen generaattorin kuormituksen, ulkoisten ja ohjausominaisuuksien ja toimintaominaisuuksien tutkimus. Moottorin käynnistämisen ominaisuudet rinnakkaisherätysjärjestelmällä.
laboratoriotyö, lisätty 9.2.2014
Tasavirtamoottoreiden mekaanisten ominaisuuksien tutkimus rinnakkais-, riippumattomalla ja sarjavirityksellä. jarrutustilat. sähkömoottori vaihtovirta vaiheroottorilla. Moottorin käynnistyspiirien, aikafunktioiden tutkiminen.
laboratoriotyö, lisätty 23.10.2009
Tasavirtageneraattorin toimintaperiaate ja laite. Ankkurin käämien tyypit. Tasavirtageneraattoreiden viritysmenetelmät. Tasavirtakoneiden käännettävyys. Rinnakkaisen, riippumattoman, sarja- ja sekaherätyksen moottori.
tiivistelmä, lisätty 17.12.2009
DC-moottorin suunnittelu. Tärkeimpien etujen ydin, ankkurikäämin tyyppi ja nousu. Käämityskierrosten lukumäärä, keräyslevyt, raot. Moottorin magnetointiominaisuus. Ankkurin käämityslankojen massa ja tärkeimmät dynaamiset indikaattorit.
lukukausityö, lisätty 21.5.2012
Moottorin virransyöttö nopeudensäädön aikana muuttamalla jännitearvoa erillisestä säädetystä tasavirtalähteestä. Tyristorimuuntajien käyttö tasavirtasähkökäytöissä. Rakennesuunnitelma tyristori muunnin.
lukukausityö, lisätty 1.2.2015
DC-moottorin DP-62 käynnistyksen mallinnus härkäkärryä varten SciLab-paketilla. Mallin lohkokaavio, sen elementit. DP-62-moottorin passitiedot, herätteen tyyppi. Transienttikaavio, piirtäminen.
laboratoriotyö, lisätty 18.6.2015
Tasavirtamoottorin laskennan ominaisuudet ohjausobjektin asennosta. Tyristorimuuntimen, sähkökäyttösensorien ja virta-anturin laskenta. Kaavio tasavirtamoottorista, jossa on riippumaton heräte. Ulkomuodon mallinnus.
Luku 29
Peruskonseptit
M, pyörivä.
antielektromotorinen
![]() .
(29.1)
.
(29.1)
![]() , (29.3)
, (29.3)
![]() ,
,
![]() .
.
Mutta (25.24) mukaan
![]()
![]() , (29.4)
, (29.4)
![]() .
.
M, .
eli U tai virtauksen väheneminen F ;
sinä, F
F
Moottorin käynnistys
U .
käynnistysreostaatit
R O 1
![]() .
.
Samalla vivun läpi R ja rengas W R,
,
M suoraan verrannollinen virtaukseen F F
Luku 29
Peruskonseptit
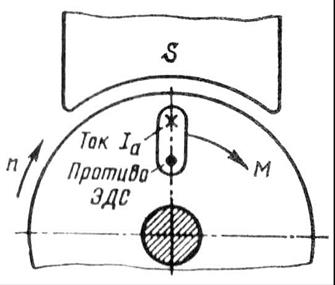
Keräyskoneilla on käännettävyysominaisuus, eli ne voivat toimia sekä generaattoritilassa että moottoritilassa. Siksi, jos DC-kone on kytketty tasavirtalähteeseen, virrat ilmestyvät koneen herätekäämiin ja ankkurikäämiin. Ankkurin virran vuorovaikutus virityskentän kanssa luo sähkömagneettisen momentin ankkuriin M, joka ei ole jarrutusta, kuten generaattorissa, vaan pyörivä.
Vaikutuksen alaisena sähkömagneettinen vääntömomentti ankkuri, kone alkaa pyöriä, eli kone toimii moottoritilassa kuluttaen sähköenergiaa verkosta ja muuntaen sen mekaaniseksi energiaksi. Moottorin käytön aikana sen ankkuri pyörii magneettikentässä. Ankkurin käämiin indusoituu EMF, jonka suunta voidaan määrittää "oikean käden" säännöllä. Luonteeltaan se ei eroa generaattorin ankkurikäämitykseen indusoidusta EMF:stä. Moottorissa EMF on suunnattu virtaa vastaan, ja siksi sitä kutsutaan antielektromotorinen ankkurin voima (back-EMF) (kuva 29.1).
Kun moottori käy tasaisella nopeudella,
![]() .
(29.1)
.
(29.1)
Kohdasta (29.1) seuraa, että ankkurikäämin taka-EMF ja ankkuripiirin jännitehäviö tasapainottavat moottoriin syötettyä jännitettä. Perustuu (29.1) ankkurivirtaan
Kerrotaan yhtälön (29.1) molemmat puolet ankkurivirralla , saadaan ankkuripiirin tehoyhtälö:
![]() , (29.3)
, (29.3)
missä on ankkurikäämipiirin teho; - sähköhäviöiden teho ankkuripiirissä.
Ilmaisun olemuksen selventämiseksi suoritamme seuraavan muunnoksen:
![]() ,
,
![]() .
.
Mutta (25.24) mukaan
![]()
![]() , (29.4)
, (29.4)
missä on ankkurin pyörimiskulmataajuus; - moottorin sähkömagneettinen teho.
Siksi ilmaus on moottorin sähkömagneettinen teho.
Muuntamalla lauseketta (29.3) huomioiden (29.4) saamme
![]() .
.
Tämän yhtälön analyysi osoittaa, että kun moottorin akselin kuormitus kasvaa, eli sähkömagneettinen vääntömomentti kasvaa M, lisää ankkurin käämipiirin tehoa, eli tehoa moottorin tulossa. Mutta koska moottoriin syötetty jännite pysyy muuttumattomana, moottorin kuormituksen kasvuun liittyy ankkurikäämin virran kasvu .
Herätysmenetelmästä riippuen DC-moottorit sekä generaattorit jaetaan moottoreiksi, joissa on kestomagneeteista (magnetosähköinen) viritys ja sähkömagneettinen viritys. Jälkimmäiset, virityskäämin kytkemispiirin mukaisesti ankkurikäämin suhteen, jaetaan rinnakkaisiin (shuntti), sarja- (sarja) ja sekoitettuihin (yhdistettyihin) viritysmoottoreihin.
EMF-kaavan mukaan moottorin nopeus (rpm)
Korvaamalla arvon arvosta (29.1), saamme (rpm)
eli moottorin nopeus on suoraan verrannollinen jännitteeseen ja kääntäen verrannollinen viritysvuon. Fyysisesti tämä selittyy sillä, että jännitteen nousu U tai virtauksen väheneminen F aiheuttaa eron kasvun ; tämä puolestaan johtaa virran kasvuun [katso kuva. (29.2)]. Tämän seurauksena lisääntynyt virta lisää vääntömomenttia, ja jos kuormitusmomentti pysyy ennallaan, moottorin nopeus kasvaa.
Kohdasta (29.5) seuraa, että moottorin nopeutta voidaan ohjata muuttamalla joko jännitettä sinä, syötetään moottoriin tai päämagneettivuon F tai sähkövastus ankkuripiirissä.
Ankkurin pyörimissuunta riippuu virityksen magneettivuon suunnista F ja virta ankkurikäämityksessä. Siksi muuttamalla minkä tahansa näistä suureista suuntaa voit muuttaa ankkurin pyörimissuuntaa. On pidettävä mielessä, että piirin yhteisten napojen kytkeminen veitsikytkimellä ei muuta ankkurin pyörimissuuntaa, koska tämä muuttaa samanaikaisesti virran suuntaa sekä ankkurikäämissä että herätekäämissä.
Moottorin käynnistys
Moottorin ankkurivirta määritetään kaavalla (29.2). Jos hyväksyt U ja ennallaan, niin virta riippuu taka-EMF:stä . Virta saavuttaa maksimiarvonsa, kun moottori käynnistetään. Käynnistyksen alkuhetkellä moottorin ankkuri on paikallaan eikä sen käämiin aiheudu EMF:ää. Siksi, kun moottori on kytketty suoraan verkkoon, sen ankkurin käämeissä tapahtuu käynnistysvirta
Tyypillisesti vastus on pieni, joten käynnistysvirran arvo saavuttaa liian suuria arvoja, 10-20 kertaa suurempi kuin nimellisvirta moottori.
Näin suuri käynnistysvirta on erittäin vaarallinen moottorille. Ensinnäkin se voi aiheuttaa pyöreän tulipalon koneeseen, ja toiseksi tällaisella virralla moottoriin kehittyy liian suuri käynnistysmomentti, joka vaikuttaa moottorin pyöriviin osiin ja voi mekaanisesti tuhota ne. Ja lopuksi tämä virta aiheuttaa jyrkän jännitteen laskun verkossa, mikä vaikuttaa haitallisesti muiden tähän verkkoon kuuluvien kuluttajien toimintaan. Siksi moottorin käynnistämistä suoraan verkkoon kytkemällä (ei-reostaattinen käynnistys) käytetään yleensä moottoreille, joiden teho on enintään 0,7-1,0 kW. Näissä moottoreissa ankkurikäämin lisääntyneen vastuksen ja pienten pyörivien massojen vuoksi käynnistysvirran arvo on vain 3-5 kertaa suurempi kuin nimellisvirta, mikä ei aiheuta vaaraa moottorille. Mitä tulee suurempitehoisiin moottoreihin, niitä käynnistettäessä ne rajoittavat käynnistysvirtaa. käynnistysreostaatit(PR), sisältyy sarjaan ankkuripiirissä (reostaattinen käynnistys).
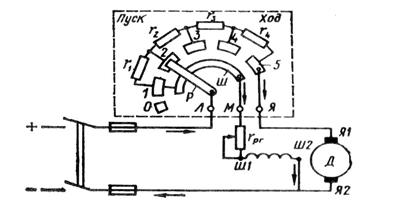
Ennen kuin käynnistät moottorin, tarvitset vivun R laita reostaatti tyhjäkäyntikoskettimelle O(Kuva 29.2). Kytke sitten veitsikytkin päälle, siirrä vipu ensimmäiseen välikoskettimeen 1
ja moottorin ankkuripiiri on kytketty verkkoon reostaatin suurimman vastuksen kautta ![]() .
.
Riisi. 29.2. Käynnistysreostaatin päällekytkentäkaavio
Samalla vivun läpi R ja rengas W verkkoon on kytketty virityskäämi, jonka virta ei koko käynnistysjakson aikana riipu vivun asennosta R, koska väylän resistanssi on mitätön virityskäämin resistanssiin verrattuna.
Käynnistysankkurivirta käynnistysreostaatin impedanssilla
Virran tullessa ankkuripiiriin tapahtuu käynnistysmomentti, jonka vaikutuksesta ankkurin pyöriminen alkaa. Kun nopeus kasvaa, taka-emf kasvaa , mikä johtaa käynnistysvirran ja käynnistysmomentin pienenemiseen.
Kun moottorin ankkuri kiihtyy, käynnistysreostaattivipu kytkeytyy asentoihin 2, 3 jne. Reostaattivivun asennossa 5 moottorin käynnistys päättyy. Käynnistysreostaatin vastus valitaan yleensä siten, että suurin käynnistysvirta ylittää nimellisvirran enintään 2-3 kertaa.
Moottorin vääntömomentista lähtien M suoraan verrannollinen virtaukseen F[cm. (25.24)], niin rinnakkais- ja sekavirityksen moottorin käynnistymisen helpottamiseksi, herätepiirin reostaatin vastus tulisi poistaa kokonaan. viritysvirtaus F tässä tapauksessa saa korkein arvo ja moottori kehittää vaaditun vääntömomentin pienemmällä ankkurivirralla.
Suurempien moottoreiden käynnistämiseen ei kannata käyttää käynnistysreostaatteja, koska se aiheuttaisi merkittäviä energiahäviöitä. Myös käynnistysreostaatit olisivat tilaa vieviä. Siksi suuritehoisissa moottoreissa käytetään moottorin reostaattitonta käynnistystä alentamalla jännitettä. Esimerkkejä tästä ovat sähköveturin vetomoottorien käynnistäminen kytkemällä ne pois päältä sarjaliitäntä kun käynnistetään rinnakkain normaali operaatio(katso § 29.6) tai käynnistää moottori generaattori-moottoripiirissä (katso § 29.4).
Rinnakkaisherätysmoottori
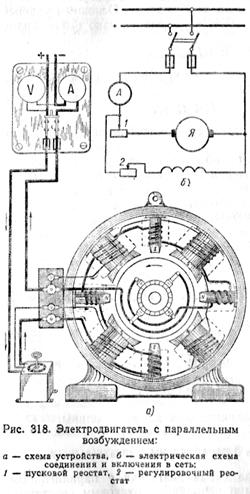
Kaavio rinnakkaisen viritysmoottorin liittämiseksi verkkoon on esitetty kuvassa. 29.3, a. Tälle moottorille on ominaista, että kenttäkäämin (OB) virta ei riipu kuormitusvirrasta (ankkurivirrasta). Herätyspiirin reostaatti toimii virityskäämin virran ja päänapojen magneettivuon säätelemiseksi.
Moottorin suorituskykyominaisuudet määräytyvät sen mukaan käyttöominaisuudet, joka ymmärretään pyörimisnopeuden riippuvuutena n, nykyinen minä, hyödyllinen hetki M2, vääntömomentti M moottorin akselin tehosta R 2 ja (kuva 29.3, 6 ).
Analysoidaksemme riippuvuutta ja , jota yleensä kutsutaan nopeusominaiskäyräksi, siirrymme kaavaan (29.5), josta voidaan nähdä, että vakiojännitteellä U kaksi tekijää vaikuttaa nopeuteen: jännitteen pudotus ankkuripiirissä ja viritysvuo F. Kun kuormitus kasvaa, osoittaja pienenee, kun taas ankkurireaktion vuoksi nimittäjä myös pienenee F. Tyypillisesti ankkurireaktion aiheuttama virtauksen väheneminen on pientä ja ensimmäinen tekijä vaikuttaa nopeuteen enemmän kuin toinen. Tämän seurauksena moottorin nopeus kasvaa kuormituksen myötä R 2 pienenee, ja kuvaaja saa putoavan muodon, jossa on pieni pullistuma x-akselia kohti. Jos ankkurin reaktioon moottorissa liittyy merkittävämpi virtauksen heikkeneminen F, silloin pyörimisnopeus kasvaa kuormituksen kasvaessa, kuten katkoviivakäyrässä kuvassa 2 näkyy. 29.3, b. Tällainen riippuvuus ei kuitenkaan ole toivottavaa, koska se ei yleensä täytä moottorin vakaan toiminnan ehtoa: moottorin kuormituksen kasvaessa pyörimisnopeus kasvaa, mikä johtaa lisäkuormitukseen jne., eli pyörimisnopeus n moottori kasvaa loputtomasti ja moottori "ylikuumenee". Saadakseen nopeusominaisuudelle laskevan käyrän muodon, joissakin shunttimoottoreissa käytetään kevyttä (pienellä kierrosmäärällä) sarjaherätyskäämitystä, jota ns. stabiloiva käämitys. Kun tämä käämi kytketään päälle koordinoidusti rinnakkaisherätyskäämin kanssa, sen MMF kompensoi ankkurireaktion demagnetoivaa vaikutusta siten, että vuo F pysyy käytännössä muuttumattomana koko kuormitusalueella .., koska
Jos jätämme huomiotta ankkurireaktion, voimme (koska ) hyväksyä . Tällöin rinnakkaisen viritysmoottorin mekaaninen ominaisuus on suora viiva, joka on hieman vinossa abskissa-akseliin nähden (kuva 29.4, a). Mekaanisen ominaisuuden kaltevuuskulma on sitä suurempi, mitä suurempi on ankkuripiiriin sisältyvä resistanssi. Moottorin mekaanisia ominaisuuksia kutsutaan ankkuripiirin lisävastuksen puuttuessa luonnollinen(suoraan 1 ). Moottorin mekaanisia ominaisuuksia, jotka saadaan lisäämällä ankkuripiiriin lisävastusta, kutsutaan keinotekoinen(suoraan 2 ja 3 ).
Mekaanisen ominaisuuden tyyppi riippuu myös päämagneettivuon arvosta F. Eli pienentyessä F pyörimisnopeus x.x kasvaa. ja samanaikaisesti kasvaa, ts. yhtälön (29.11) molemmat termit kasvavat. Tämä johtaa mekaanisten ominaisuuksien jyrkkyyteen, eli sen jäykkyyden heikkenemiseen (kuva 29.4, b).
Kun ankkurin jännite muuttuu U pyörimisnopeus muuttuu, mutta pysyy ennallaan. Tämän seurauksena mekaanisen ominaisuuden jäykkyys (jos jätämme huomiotta ankkurireaktion vaikutuksen) ei muutu (kuva 29.4, sisään), eli ominaisuudet muuttuvat korkeudeltaan pysyen samansuuntaisina toistensa kanssa.
§ 138. SÄHKÖMOOTTORI RINNAKKAISELLA TOIMINTALLA
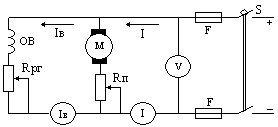
Kuvassa Kuva 318 esittää kaavion moottorista, jossa on rinnakkaisherätys ja käynnistysreostaatti, joka sisältyy ankkuripiiriin. Koska herätekäämi on kytketty rinnan verkkoon, niin milloin jatkuva vastus herätepiirissä ja verkkojännitteessä, moottorin magneettivuon F on oltava vakio.
Kaavasta
voidaan nähdä, että vasta-e. d.s. moottori laskee ankkurivirran kasvaessa, jolloin myös moottorin nopeus laskee.
Kuitenkin, kuten aiemmin mainittiin, ankkurikäämin jännitehäviön I a r a suuruus on hyvin pieni verrattuna jännitteeseen U. Siksi kuormitusvirran kasvaessa moottorin nopeus laskee hieman.
Näin ollen rinnakkaisherätetyn moottorin ominaisuus on lähes vakio pyörimisnopeus sen akselin kuormituksen muuttuessa. Yleensä tämän tyyppisten moottoreiden nopeudet laskevat vain 3-5 %, kun täysi kuorma saavutetaan.
Moottorin vääntömomentti on verrannollinen ankkurivirran ja magneettivuon tuloon:
Tästä voidaan nähdä, että moottorin vääntömomentti rinnakkaisella virityksellä on verrannollinen ankkurivirtaan:
Siksi ankkuripiiriin sisältyvän ampeerimittarin avulla voidaan arvioida moottorin kuormitus.
Moottorilla on suurin pyörimisnopeus tyhjäkäynnillä, jos säätöreostaatin vastus poistetaan kokonaan. Herätyspiirin avaaminen saa moottorin magneettivuon pienenemään mitättömäksi jäännösmagnetismivuoksi. Koska counter-e. d.s. pitäisi olla melkein yhtä suuri kuin verkkojännite, niin magneettivuon pienentyessä moottorin pyörimisnopeus kasvaa jyrkästi ja tulee vaaralliseksi moottorin mekaaniselle lujuudelle. Siksi moottoria käytettäessä on tarpeen seurata virityspiirin hyvää kuntoa.
Shunttimoottorin nopeuden säätö tehdään yleensä vaihtelemalla vuota virityspiirin säädettävällä reostaatilla. Tämä nopeudensäätömenetelmä on taloudellisin. Joissakin moottoreissa on nopeudensäätö 1,5:1 - 4:1. Numerot osoittavat maksiminopeuden ja miniminopeuden suhteen. Säädön rajoja rajoittavat pääasiassa kytkentäolosuhteiden heikkeneminen ja ankkurin mekaaninen lujuus.
Rinnakkaisherätteisten moottoreiden pyörimissuunnan muuttaminen voidaan tehdä muuttamalla virran suuntaa napojen herätekäämissä tai muuttamalla virran suuntaa ankkurikäämissä. Yleensä pyörimisen vaihto suoritetaan toisella tavalla, koska kaikki toiminnot virityskäämin kanssa ovat vaarallisia käyttöhenkilöstölle ja ei-toivottuja mm. d.s. itseinduktio, joka voi aiheuttaa käämin eristyksen rikkoutumisen ja koskettimien palamisen.
Rinnakkaisherätteisiä moottoreita käytetään tasavirtaverkoissa joidenkin koneiden, mekanismien (sähkötiet, pumput, puhaltimet, kutomakoneet, valssaamot, kaivosnostimet) ohjaamiseen, jotka vaativat tasaisen pyörimisnopeuden tai laajan nopeuden säädön.
23 .Ankkurireaktio, sen Negatiivinen vaikutus DC-moottorin toiminnasta, tapoja kompensoida ankkurireaktio.
Ankkurireaktio - ankkurivirran luoman magneettikentän vaikutus koneen päänapojen magneettikenttään. Idle-tilassa ankkurivirta = 0 ja koneen magneettikenttä muodostuu vain päänapoista (kuva (a)). Se on symmetrinen päänapojen akselin ja geometrisen neutraalin suhteen. Jos sammutat herätekäämin ja liität ankkuriin virtalähde, niin ankkurikäämissä kulkeva virta muodostaa kuvan (b) mukaisen magneettikentän. tämän kentän napojen akseli on sama kuin harjojen akseli ja on kohtisuorassa päänapojen kentän akseliin nähden. Ankkurin pyöriminen ei vaikuta ankkurikentän kuvioon, koska virran jakautuminen ankkurikäämityksessä pysyy vakiona. Koneen käyttötilassa molemmat käämit kytketään päälle ja magneettikenttä muodostetaan summaamalla molemmat kentät. Tämän seurauksena magneettikentän akselia kierretään joidenkin kulmien verran, fyysistä neutraalia kierretään samalla kulmalla. Moottoritilassa vapaa vaihdetaan pyörimistä vastaan. Siirron seurauksena osa harjan ja nollan välissä olevan rinnakkaishaaran johtimista jää vastakkaisen napaisuuden alle ja muodostaa jarrutusmomentin Koneen kuormituksen muutos johtaa muutokseen ankkurivirrassa ja vastaavasti sen magneettikentän lisäys tai väheneminen. Siksi kulma muuttuu kuormituksen mukana.Neutraalin siirtymän lisäksi ankkurireaktio vähentää kokonaismagneettivuoa johtuen siitä, että päänapojen alla oleva kenttä vääristyy. Napan toisen reunan alla se heikentää ja toisen reunan alla vahvistuu, mutta napareunan kyllästymisen aiheuttama kentän vahvistus on pienempi kuin heikkeneminen ja tuloksena oleva magneettivuo pienenee, mikä vaikuttaa negatiivisesti energiaan. koneen suorituskyky Fyysisen nollan siirtyminen vaikuttaa myös negatiivisesti kytkentäprosessiin Tehokkain . keinoja vähentää ankkurireaktion vaikutus on kompensointikäämitys. Se sopii pääpylväiden erityisiin uriin ja on kytketty sarjaan ankkuripiiriin. Kompensointikäämin magneettikenttä on vastakkainen ja kompensoi ankkurin magneettikenttää. Kompensointikäämin virta = ankkurivirta, joten kompensointi tapahtuu kaikissa tiloissa tyhjäkäynnistä täyteen kuormaan. Tämän seurauksena koneen kenttä pääpylväiden alla pysyy käytännössä ennallaan. Toinen tapa - lisääntyä puhdistuma pääpylväiden reunojen ja ankkurin välissä. Virtauksen ylläpitämiseksi raon kasvaessa tarvitaan herätekäämin MMF:n lisäystä.
DC-sähkökoneet.
Generaattori rinnakkaisvirityksellä.
Laskentakaavat:
Generaattorin verkkoon antama virta:
toim. generaattori: E \u003d U + Iya ∙Rya.
Verkkoon toimitettu teho: P2 \u003d U ∙ I \u003d I 2 ∙ R
Käyttömoottorin teho: P1 = P2/ η
Tehon menetys ankkurikäämissä:
Rya \u003d I 2 i ∙ Rya
Tehon menetys kenttäkäämityksessä:
Рв = U ∙Iв = I 2 в∙ Rв
Kokonaishäviöt: ΣP = P1 - ...
R2.
Generaattorin tehokkuus:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
Moottori rinnakkaisella virityksellä.
Laskentakaavat:
Moottorin virta: I \u003d Ia + Iv
Moottorin jännite: U \u003d E + Ii ∙Rya.
Verkosta kulutettu teho: Р1 = U∙I
Akselin teho: P 2 = P 1 ∙η
Momentti moottorin akselilla:
M \u003d 9550 ∙ P 2 / n 2.
Moottorin tehokkuus:
η \u003d P 2 / P 1 \u003d (U∙I-ΣP) / U∙I
Esimerkki 6.1. Tasavirtageneraattori, jossa on rinnakkaisheräte, kehittää nimellisjännitteen Un = 220 V. Generaattoria kuormitetaan kuormalla Rn = 2,2 ohmia. Ankkurin käämin vastus Rya = 0,2 Ohm, herätekäämi Rv = 220 Ohm. Generaattorin hyötysuhde η = 0,87. Määritä seuraavat määrät:
1.kuormavirta; 2. ankkurivirta; 3. viritysvirta; 4. generaattori emf;
5.nettoteho; 6. virrankulutus; 7. generaattorin kokonaishäviöt; 8. häviöt ankkurikäämityksessä; 9. häviöt herätekäämissä.
1.Kuormitusvirta:
2. Herätysvirta:
![]()
3. Ankkurivirta: Iа \u003d I - Iv \u003d 100 - 1 \u003d 99 A.
4. Emf-generaattori:
E \u003d U + Ii ∙ Rya \u003d 220 + 99 0,1 \u003d 229,9 V.
5.Nettoteho:
Р2 = Un ∙ I = 220 ∙ 100 = 22000 W = 22 kW.
6.Virrankulutus:
7. Generaattorin kokonaishäviöt:
ΣP \u003d P1 - P2 \u003d 25,87 - 22 \u003d 3,87 kW.
8. Häviöt ankkurikäämityksessä:
Rya \u003d Iya 2 ∙Rya \u003d 99 2 ∙0,2 \u003d 1960,2 W.
9. Häviöt herätekäämissä:
Pv = Un ∙ Iv = 220 ∙ 1 = 220 W.
Vastaus: I = 100A; Iv \u003d 1 A; la = 99 A; E = 229,9 V; P2 = 22 kW;
P1 = 25,87 kW; ΣР = 3,87 kW; Rya = 1960,2 W; Pv \u003d 220 W.
Esimerkki 6.2. Kuva 8.2 Rinnakkaisherätteinen DC-moottori toimii verkosta Un = 220 V. Ankkurin nopeus n2 = 1450 rpm. Moottorin virta I \u003d 500 A, ankkuri takaosan emf E \u003d 202 V, virityskäämin vastus Rv \u003d 44 ohmia. Moottorin tehokkuus
n = 0,88. Määritä: 1. viritysvirta; 2. ankkurivirta; 3. ankkurin käämityksen vastus; 4.virrankulutus; 5.hyödyllinen akseliteho; 6 Moottorin kokonaishäviöt; 7. häviöt ankkurikäämityksessä; 8. häviöt ankkurikäämityksessä; 9.vääntömomentti akselissa.
1. Herätysvirta:
![]()
2. Ankkurivirta:
Ia \u003d I - Iv \u003d 500 -5 \u003d 495 A.
3. Ankkurin käämityksen vastus:
4. Virrankulutus verkosta:
P1 \u003d Un ∙ I \u003d 220 ∙ 500 \u003d 110 000 W \u003d 110 kW.
5. Akselin nettoteho:
Р2 = P1 ∙ η = 110 ∙ 0,87 = 95,7 kW.
6. Moottorin kokonaishäviöt:
ΣP \u003d P1 - P2 \u003d 110 - 95,7 \u003d 14,3 kW.
Suosittelemme lukemaan
, diagnoosi, hoito Urogenitaalisen klamydian hoito") Urogenitaalisen klamydian kuvaus, syyt, oireet (merkit), diagnoosi, hoito Urogenitaalisen klamydian hoito
Urogenitaalisen klamydian kuvaus, syyt, oireet (merkit), diagnoosi, hoito Urogenitaalisen klamydian hoito Hyödyt ja merkitys hydroaminohapon treoniinin ihmiskeholle L treoniini mitä
Hyödyt ja merkitys hydroaminohapon treoniinin ihmiskeholle L treoniini mitä Odottaako tai olla odottamatta kaveria armeijasta Mistä syystä heidät voidaan tilata armeijasta
Odottaako tai olla odottamatta kaveria armeijasta Mistä syystä heidät voidaan tilata armeijasta Paistetut omenat raejuustolla Paistetut omenat raejuustolla
Paistetut omenat raejuustolla Paistetut omenat raejuustolla

