sähkömagneettinen momentti a synkroninen moottori syntyy roottorin käämin virran ja pyörivän magneettikentän vuorovaikutuksesta.
Sähkömagneettinen momentti M verrannollinen sähkömagneettiseen tehoon:
 (3.40)
(3.40)
Kulmasynkroninen pyörimisnopeus.
Korvaamalla kohdassa (3.39) sähkömagneettisen tehon arvon (3.33), saamme:
 , (3.41)
, (3.41)
eli oikosulkumoottorin sähkömagneettinen momentti on verrannollinen roottorin käämityksen sähköhäviöiden tehoon.
Jos lausekkeen (3.28) mukainen roottorivirran arvo korvataan arvolla (3.41), saadaan kaava sähkömagneettinen momentti asynkroninen kone (Nm):
 (3.42)
(3.42)
Asynkronisen koneen ekvivalenttipiirin parametrit r 1, r¢ 2, x 1 ja x¢ 2, jotka sisältyvät lausekkeeseen (3.42), ovat vakioita, koska niiden arvot pysyvät käytännössä ennallaan koneen kuormituksen muuttuessa. Staattorin vaihekäämin jännitettä voidaan myös pitää vakiona. U 1 ja taajuus f1. Hetken suhteen M ainoa muuttuja on lipsahdus s, joka asynkronisen koneen eri toimintatiloissa voi saada eri arvoja välillä + ¥ - -¥ (katso kuva 3.5).
Harkitse vääntömomentin riippuvuutta luistosta M = f(s) klo U 1= vakio, f1= vastaavan piirin const ja vakioparametrit. Tätä riippuvuutta kutsutaan mekaaninen ominaisuus asynkroninen kone. Lausekkeen analyysi (3.42), joka on mekaanisen ominaisuuden analyyttinen ilmaus M = f(s), osoittaa sen liukuma-arvoille s= 0 ja s= ¥ sähkömagneettinen momentti M= 0. Tästä seuraa, että mekaaninen ominaisuus M = f(s) on maksimi.
Kriittisen lipsuman määrittämiseksi s kr, joka vastaa maksimimomenttia, on tarpeen ottaa (3.42):n ensimmäinen derivaatta ja rinnastaa se nollaan: . Tuloksena
 (3.43)
(3.43)
Korvaamalla kriittisen luiston arvon (3.43:n mukaan) sähkömagneettisen momentin (3.42) lausekkeeseen, saadaan muunnossarjan jälkeen maksimimomentin (N m) lauseke:
 (3.44)
(3.44)
Kohdissa (3.43) ja (3.44) plusmerkki vastaa moottoritilaa ja miinusmerkki asynkronisen koneen generaattoritoimintatilaa.
Asynkronisille koneille yleinen tarkoitus staattorikäämin aktiivinen vastus r1 paljon pienempi kuin induktiivisten reaktanssien summa: r1< < (x 1 + x¢ 2). Siksi arvo laiminlyöminen r1, saamme kriittisen lipsun yksinkertaistetut lausekkeet
 , (3.45)
, (3.45)
ja suurin vääntömomentti (N m)
 (3.46)
(3.46)
Riisi. 3.10. Asynkronisen koneen toimintatilojen riippuvuus luistosta
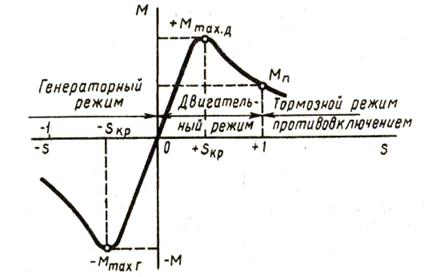
Lausekkeen analyysi (3.44) osoittaa sen maksimi hetki generaattoritilassa on enemmän asynkronisia koneita kuin moottoritilassa ( M max Г > М maxD). Kuvassa 3.4 näyttää asynkronisen koneen mekaaniset ominaisuudet M = f(s) klo U 1= vakio Tämä ominaisuus ilmaisee eri toimintatiloja vastaavat vyöhykkeet: moottoritila (0< s < 1), когда электромагнитный момент M pyörii; generaattoritila ( - ¥ < s < 0) и тормозной режим противовключением (1 < s < + ¥), когда электромагнитный момент M on estävä.
Kohdasta (3.42) seuraa, että oikosulkumoottorin sähkömagneettinen vääntömomentti on verrannollinen verkkojännitteen neliöön: M ≡ U 1 2. Tämä vaikuttaa suuresti moottorin suorituskykyyn: pienikin verkkojännitteen aleneminen vähentää huomattavasti asynkronisen moottorin vääntömomenttia. Esimerkiksi kun verkkojännite laskee 10 % suhteessa nimellisarvoon ( U 1 = 0.9U nom) moottorin sähkömagneettinen vääntömomentti pienenee 19 %: М¢ = 0.9 2 M = 0.81M, missä M— momentti verkon nimellisjännitteellä ja M¢ - vääntömomentti alennetulla jännitteellä.
Asynkronisen moottorin toiminnan analysoimiseksi on kätevämpää käyttää mekaanista ominaisuutta M = f(s), esitetty kuvassa. 3.5.
 |
Riisi. 3.11. Induktiomoottorin sähkömagneettisen vääntömomentin riippuvuus luistosta
Kun moottori on kytketty verkkoon, staattorin magneettikenttä alkaa ilman inertiaa välittömästi pyöriä synkronisella taajuudella n 1, samalla moottorin roottori inertiavoimien vaikutuksesta käynnistyksen alkuhetkellä pysyy liikkumattomana ( n 2= 0) ja liukuva s = 1.
Korvaaminen osaan (3.42) lipsahdus s= 1, saadaan lauseke asynkronisen moottorin käynnistysmomentille (N m):
 (3.47)
(3.47)
Tämän hetken vaikutuksesta moottorin roottorin pyöriminen alkaa, kun taas luisto pienenee ja vääntömomentti kasvaa ominaisuuden mukaisesti M = f(s). Kriittinen lipsahdus s kr hetki saavuttaa maksimiarvonsa M max x.
Pyörimisnopeuden lisääntyessä edelleen (luiston väheneminen), momentti M alkaa pienentyä, kunnes se saavuttaa tasaisen arvon, joka on yhtä suuri kuin moottorin roottoriin kohdistuvien vastamomenttien summa: momentti XX M0 ja hyödyllinen kuormitusmomentti (moottorin akselin vääntömomentti) M 2, tuo on
M \u003d M 0 + M 2 \u003d M st. (3.48)
On pidettävä mielessä, että kun luistot ovat lähellä yhtenäisyyttä (moottorin käynnistystila), asynkronisen moottorin vastaavan piirin parametrit muuttavat arvojaan huomattavasti. Tämä selittyy pääasiassa kahdella tekijällä: staattorin ja roottorin hammastettujen kerrosten lisääntynyt magneettinen kyllästyminen, mikä johtaa induktiivisen vuotovastuksen laskuun x 1 ja x 2 ja virran siirtymän vaikutus roottorin tangoissa, mikä johtaa roottorin käämin aktiivisen vastuksen kasvuun r 2 ¢. Näin ollen (3.42), (3.44) ja (3.46) mukaisen sähkömagneettisen vääntömomentin laskennassa käytettyjä asynkronisen moottorin ekvivalenttipiirin parametreja ei voida käyttää käynnistysmomentin laskemiseen kohdan (3.47) mukaisesti.
Staattinen momentti M st on yhtä suuri kuin vastavoimamomenttien summa roottorin tasaisella pyörimisellä ( n 2= const). Oletetaan, että vastamomentti moottorin akselilla M 2 vastaa moottorin nimelliskuormitusta. Tässä tapauksessa moottorin vakaan tilan määrää mekaanisen ominaisuuden piste koordinaatteineen M = M nim ja s = s nom, missä M nim ja s nim— sähkömagneettisen vääntömomentin ja luiston nimellisarvot.
Mekaanisten ominaisuuksien analyysistä seuraa myös, että oikosulkumoottorin vakaa toiminta on mahdollista kriittistä pienemmillä luistoilla (s< s кр ), eli mekaanisen ominaisuuden osiossa OA. Tosiasia on, että juuri tällä alueella moottorin akselin kuormituksen muutokseen liittyy vastaava muutos sähkömagneettisessa vääntömomentissa.
Joten jos moottori oli käynnissä nimellistilassa ( M nom; s nim), hetket ovat yhtä suuret: M nom \u003d M 0 + M 2. Jos kuormitusmomentti kasvaa M 2 arvoon asti M¢ 2, silloin hetkien tasa-arvoa rikotaan, ts. M nim< М 0 + М 2 , ja roottorin nopeus alkaa laskea (luisto kasvaa). Tämä johtaa sähkömagneettisen vääntömomentin nousuun arvoon M¢ \u003d M 0 + M¢ 2, (kohta B), jonka jälkeen moottorin toimintatila muuttuu jälleen tasaiseksi.
Jos moottorin käytön aikana nimellistilassa kuormitusmomentti pienenee arvoon М¢¢ 2, silloin momenttien tasa-arvo rikotaan jälleen, mutta nyt vääntömomentti on suurempi kuin vastakkaisten summa: M nom > M 0 + M¢¢ 2. Roottorin nopeus alkaa kasvaa (luisto pienenee), mikä johtaa sähkömagneettisen vääntömomentin laskuun M arvoon asti M¢¢ \u003d M 0 + M¢¢ 2(kohta C); vakaa toimintatila palautetaan uudelleen, mutta muilla arvoilla M ja s.
Induktiomoottorin toiminta muuttuu epävakaaksi luiston aikana s³s kr. Joten jos moottorin sähkömagneettinen vääntömomentti M = M max, ja liukastua s = s kr, silloin jopa hieman lisättyä kuormitusmomenttia M 2, mikä lisää liukumista s, johtaa sähkömagneettisen vääntömomentin laskuun M. Tätä seuraa luiston lisäys ja niin edelleen, kunnes liukuma saavuttaa arvon s= 1, eli kunnes moottorin roottori pysähtyy.
Näin ollen kun sähkömagneettinen vääntömomentti saavuttaa maksimiarvonsa, asettuu oikosulkumoottorin vakaan toiminnan raja. Siksi moottorin vakaan toiminnan kannalta on välttämätöntä, että roottoriin vaikuttavien kuormitusmomenttien summa on pienempi kuin suurin vääntömomentti: M st \u003d (M 0 + M 2)< М тах . Mutta jotta oikosulkumoottorin toiminta olisi luotettavaa ja jotta satunnaiset lyhytaikaiset ylikuormitukset eivät aiheuta moottorin pysähtymistä, sen on oltava ylikuormituskapasiteetti.
Moottorin ylikuormituskyky λ määräytyy maksimimomentin suhteen perusteella M max nimelliseen M nim. varten induktiomoottorit yleiskäyttöinen ylikuormituskyky on = 1,7 ÷ 2,5.
Sinun tulee myös kiinnittää huomiota siihen, että moottorin toiminta liukuessaan s< s кр , eli mekaanisen ominaisuuden työosassa, on edullisin, koska se vastaa pieniä luistoarvoja ja siten pienempiä sähköhäviöiden arvoja roottorin käämissä P e2 \u003d sP em.
Kaavan (3.35) käyttö asynkronisten moottoreiden mekaanisten ominaisuuksien laskemiseen ei ole aina mahdollista, koska moottorien vastinpiirin parametreja ei yleensä anneta luetteloissa ja hakukirjoissa, joten käytännön laskelmia varten käytetään yleensä yksinkertaistettua vääntömomenttikaavaa käytetty. Tämä kaava perustuu oletukseen, että oikosulkumoottorin staattorikäämin aktiivinen vastus r1= 0, kun taas:
 (3.49)
(3.49)
Kriittinen lipsahdus määritetään kaavalla:
![]() . (3.50)
. (3.50)
Mekaanisen ominaisuuden laskenta on paljon yksinkertaisempaa, jos se suoritetaan suhteellisissa yksiköissä  . Tässä tapauksessa mekaanisen ominaisuuden yhtälöllä on muoto:
. Tässä tapauksessa mekaanisen ominaisuuden yhtälöllä on muoto:
 . (3.51)
. (3.51)
Yksinkertaistetun kaavan (3.51) käyttö on tarkoituksenmukaisinta laskettaessa mekaanisen ominaiskäyrän työosuutta liukumisen aikana s< s кр , koska tässä tapauksessa virhe ei ylitä teknisissä laskelmissa sallittuja arvoja. Liukuttaessa s > s kr virhe voi olla 15-17%.
Asynkronisen moottorin mekaaniset ominaisuudet verkkojännitteen ja roottorin käämin aktiivisen resistanssin muutoksilla
Kohdasta (3.42), (3.44) ja (3.47) voidaan nähdä, että oikosulkumoottorin sähkömagneettinen vääntömomentti sekä sen maksimi- ja käynnistysarvot ovat verrannollisia staattorikäämiin syötetyn jännitteen neliöön: M ≡ U12. Samalla lausekkeen (3.43) analyysi osoittaa, että kriittisen luiston arvo ei riipu jännityksestä U 1. Tämä antaa meille mahdollisuuden piirtää mekaaniset ominaisuudet M = f(s) varten erilaisia arvoja Jännite U 1(Kuva 3.12), josta seuraa, että verkkojännitteen vaihtelut U 1 hänestä nimellisarvo U 1nom niihin ei liity ainoastaan muutoksia maksimi- ja käynnistysmomenteissa, vaan myös muutoksia roottorin nopeudessa.
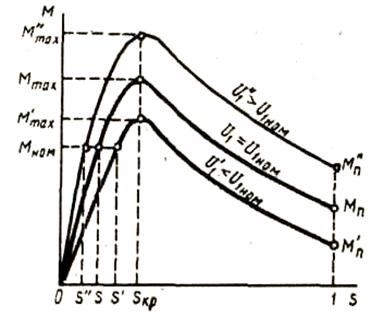 |
Riisi. 3.12. Jännitteen vaikutus oikosulkumoottorin mekaanisten ominaisuuksien tyyppiin
Verkkojännitteen pienentyessä roottorin nopeus laskee (luisto kasvaa). Jännite U 1 vaikuttaa maksimimomentin osoittamiseen M tah, sekä moottorin ylikuormituskapasiteetti. Joten jos jännite U 1 laski 30 %, ts. U 1 \u003d 0,7U nom, silloin oikosulkumoottorin suurin vääntömomentti on yli puolet:
M¢ max = 0,7 2 M max = 0.49M max.
Kuinka paljon moottorin ylikuormituskapasiteetti pienenee, jos esimerkiksi verkon nimellisjännitteellä ylikuormituskapasiteetti  , sitten kun jännite putoaa 30 %, moottorin ylikuormituskyky
, sitten kun jännite putoaa 30 %, moottorin ylikuormituskyky  , eli | moottori ei kestä edes nimelliskuormaa.
, eli | moottori ei kestä edes nimelliskuormaa.
Kuten kohdasta (3.44) seuraa, moottorin maksimivääntömomentin arvo ei riipu roottorin aktiivisesta resistanssista r¢ 2 . Mitä tulee kriittiseen lipsahdukseen s cr, silloin, kuten (3.43) nähdään, se on verrannollinen vastukseen r¢ 2 . Jos siis asynkronisessa moottorissa roottoripiirin aktiivista vastusta nostetaan asteittain, maksimivääntömomentin arvo pysyy ennallaan ja kriittinen luisto kasvaa (kuva 3.13). Tässä tapauksessa moottorin käynnistysmomentti M P kasvaa vastuksen kasvaessa r¢ 2 johonkin arvoon asti. Kuvassa tämä vastaa vastusta r¢ 2 III, jossa käynnistysmomentti on yhtä suuri kuin suurin. Vastustuskyvyn lisääntyessä edelleen r¢ 2 käynnistysmomentti pienenee.
 |
Riisi. 3.13. Roottorin käämin aktiivisen vastuksen vaikutus asynkronisen moottorin mekaanisiin ominaisuuksiin.
Kaavioanalyysi M = f(s), esitetty kuvassa. 3.13 osoittaa myös, että roottorin resistanssi muuttuu r¢ 2 mukana pyörimisnopeuden muutokset: kasvaessa r¢ 2 jatkuvalla kuormitusmomentilla M st luisto kasvaa, eli nopeus pienenee (pistettä 1, 2, 3 ja 4).
Moottoreiden suunnittelussa käytetään roottorin käämin aktiivisen vastuksen vaikutusta asynkronisten moottoreiden mekaanisten ominaisuuksien muotoon. Esimerkiksi yleiskäyttöisillä asynkronisilla moottoreilla on oltava "kova" nopeuskäyrä (katso kuva 3.11), ts. niiden on toimittava pienellä nimellisjätyksellä. Tämä saavutetaan käyttämällä roottorin käämiä, jolla on pieni aktiivinen vastus moottorissa. r¢ 2. Tässä tapauksessa moottorin hyötysuhde on suurempi, koska roottorin käämityksen sähköhäviöt vähenevät ( R e2 \u003d m 1 I¢ 2 2 r¢ 2). Valittu arvo r¢ 2 on annettava moottorille vaadittu käynnistysmomentti.
Jos on tarpeen saada moottori, jonka käynnistysmomentin arvo on kasvanut, roottorin käämityksen aktiivista vastusta lisätään. Mutta samaan aikaan saadaan moottori, jolla on suuri nimellisluiston arvo ja siten alhaisempi hyötysuhde.
Harkitut riippuvuudet M \u003d f (U 1) ja M = f(r 2") Niillä on myös suuri käytännön merkitys pohdittaessa asynkronisten moottoreiden käynnistystä ja pyörimisnopeuden säätöä.
Asynkronisen moottorin suorituskykyominaisuudet
Induktiomoottorin suorituskykyominaisuudet (kuva 3.14) ovat graafisesti ilmaistuja pyörimisnopeuden riippuvuuksia n 2, tehokkuutta h, hyödyllinen momentti (vääntömomentti akselissa) M 2, tehokerroin cosφ 1 ja staattorin virta minä 1, hyödyllisestä tehosta R 2 klo U 1= vakio ja f1= vakio

Riisi. 3.14. Asynkronisen moottorin suorituskykyominaisuudet
nopeusominaisuusn 2 \u003d f (P 2).
Induktiomoottorin roottorin nopeus
n 2 \u003d n 1 (1-s).
Liuku (3.33)
eli moottorin luiston ja siten sen nopeuden määrää roottorin sähköhäviöiden suhde sähkömagneettiseen tehoon R em.
Jättäen huomioimatta roottorin sähköhäviöt joutotilassa, voimme ottaa R e2= 0, ja siksi s0 ≈ 0 ja n 20 ≈ n 1,. Kun moottorin akselin kuormitus kasvaa, suhde (8,1) kasvaa saavuttaen arvot 0,01 ÷ 0,08 nimelliskuormalla. Tämän riippuvuuden mukaisesti n 2 = f(P 2) on käyrä, joka on hieman vinossa x-akseliin nähden.
Kuitenkin, kun roottorin aktiivinen vastus kasvaa r¢ 2 tämän käyrän kaltevuus kasvaa. Tässä tapauksessa pyörimisnopeuden muutokset p 2 kuormituksen vaihteluiden aikana R 2 lisääntyä. Tämä selittyy sillä, että lisääntyessä r¢ 2 roottorin sähköhäviöt kasvavat [katso. (3.31)].
Mekaaninen suorituskyky M 2 = f(P 2)
Hyödyllisen momentin riippuvuus moottorin akselista M 2 nettotehosta R 2 määritellään lausekkeella
 (3.53)
(3.53)
missä R 2— hyötyteho, W;
on roottorin pyörimiskulmataajuus.
Tästä ilmauksesta seuraa, että jos n 2= const, sitten kaavio M 2 \u003d f (P 2) on suora viiva. Mutta asynkronisessa moottorissa, jossa kuormitus kasvaa R 2 roottorin nopeus laskee ja siten akselin hyödyllinen momentti M 2 kuormituksen kasvaessa se kasvaa jonkin verran nopeammin kuin kuormitus ja siten kaavio M 2 = f(P2) on kaareva ulkonäkö.
Riippuvuus cosφ 1 = f(P 2)
Johtuen siitä, että staattorin virta minä 1 siinä on reaktiivinen (induktiivinen) komponentti, joka tarvitaan magneettikentän luomiseen staattoriin, asynkronisten moottoreiden tehokerroin on pienempi kuin yksi.
Tehokertoimen pienin arvo vastaa XX-moodia. Tämä selittyy sillä, että nykyinen XX minä 0 pysyy lähes muuttumattomana millä tahansa kuormituksella. Siksi pienillä moottorin kuormituksilla staattorin virta on pieni ja suurelta osin reaktiivinen ( I 1 ≈ I 0). Tämän seurauksena staattorivirran vaihesiirto jännitteeseen nähden on merkittävä ( φ ≈ φ 0 ), vain hieman alle 90° (kuva 3.15).
Asynkronisten moottoreiden tehokerroin XX-tilassa ei yleensä ylitä 0,2. Kun moottorin akselin kuormitus kasvaa, virran aktiivinen komponentti kasvaa minä 1 ja tehokerroin kasvaa saavuttaen suurimman arvon (0,80 ÷ 0,90) kuormalla, joka on lähellä nimellisarvoa.
 |
Kuva 3.15. Vektorikaavio induktiomoottorista kevyessä kuormituksessa
Kuorman lisäntymiseen liittyy laskua cosφ 1, mikä selittyy roottorin induktiivisen vastuksen kasvulla ( x 2s) lisäämällä luistoa ja siten roottorin virran taajuutta. Asynkronisten moottoreiden tehokertoimen parantamiseksi on erittäin tärkeää, että moottori käy aina tai ainakin merkittävän osan ajasta kuormalla, joka on lähellä nimelliskuormaa.
Tämä voidaan varmistaa vain, jos oikea valinta moottorin teho. Jos moottori käy alikuormitettuna merkittävän osan ajasta, lisää cosφ 1 sopiva jännite moottoriin U 1 vähentää.
Esimerkiksi moottoreissa, jotka toimivat staattorikäämin kolmiokytkennällä, tämä voidaan tehdä kytkemällä staattorin käämit uudelleen tähtiin, mikä aiheuttaa vaihejännite ajallaan. Tässä tapauksessa staattorin magneettivuo ja siten magnetointivirta pienenee noin kertoimen verran. Lisäksi staattorivirran aktiivinen komponentti kasvaa jonkin verran. Kaikki tämä lisää moottorin tehokerrointa.
Kuvassa 3.16 näyttää riippuvuuskaavioita cosφ 1 asynkroninen moottori kuormasta, kun staattorin käämit kytketään tähdellä (käyrä 1 ) ja kolmio (käyrä 2).
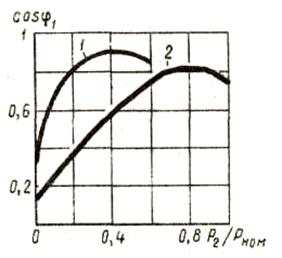
Riisi. 3.16. Riippuvuus cosφ 1 kuormasta kytkettäessä staattorikäämitys tähdellä (1) ja kolmiolla (2).
Kysymyksiä itsetutkiskelua varten
1. Selitä asynkronisen koneen toimintaperiaate.
2. Kuvaile asynkronisen koneen toimintatapoja.
3. Mitä kutsutaan asynkronisen koneen liukumiseksi?
4. Kirjoita muistiin oikosulkumoottorin jänniteyhtälöt?
5. Kirjoita muistiin oikosulkumoottorin MMF:n ja virtojen yhtälöt.
6. Piirrä oikosulkumoottorin vastaavat piirit.
7. Piirrä vektorikaavio oikosulkumoottorista.
8. Mitä häviöitä on asynkronisessa moottorissa? Piirrä energiakaavio oikosulkumoottorille.
9. Kirjoita muistiin oikosulkumoottorin sähkömagneettisen vääntömomentin kaava.
10. Piirrä kaavio oikosulkumoottorin mekaanisista ominaisuuksista.
11. Miten asynkronisen moottorin mekaaniset ominaisuudet muuttuvat verkkojännitteen ja roottorin aktiivivastuksen muutoksesta riippuen?
12. Piirrä oikosulkumoottorin toimintaominaisuudet.
Asynkronisen moottorin suorituskykyominaisuudet
TYÖTÄ SÄHKÖTEKNIIKKAA
"Asynkronisen moottorin suorituskykyominaisuudet"
Johdanto
Asynkroninen sähkökone on vaihtovirtasähkökone, jossa roottorin nopeus ei ole yhtä suuri kuin staattorin magneettikentän nopeus ja riippuu kuormituksesta. Sitä käytetään pääasiassa moottorina ja generaattorina. Staattorissa on urat, joihin sijoitetaan yksi- tai monivaiheinen (yleensä kolmivaiheinen) käämitys, joka on kytketty verkkovirtaan. Tämä käämitys on suunniteltu luomaan liikkuva magneettikenttä, pyörivä pyöreä - kolmivaiheisille koneille ja sykkivä tai pyörivä elliptinen - yksivaiheisille koneille. Roottori on sähkökoneen pyörivä osa, joka on myös suunniteltu luomaan magneettikenttä, joka vuorovaikutuksessa staattorikentän kanssa johtaa sähkömagneettisen vääntömomentin luomiseen, joka määrittää energian muuntamisen suunnan. Generaattorien kohdalla tämä momentti on luonteeltaan jarruttava ja se vastustaa voimanlähteen vääntömomenttia, joka saa roottorin liikkeelle. Moottoreissa päinvastoin tämä hetki on ajamista, joka voittaa roottorin käyttämän mekanismin vastuksen.
Asynkroninen generaattori on asynkroninen sähkökone, joka toimii generaattoritilassa. Pienitehoisen sähkövirran apulähde ja jarrulaite (sähkökäytössä).
Asynkroninen sähkömoottori on asynkroninen sähkökone, joka toimii moottoritilassa. Yleisin kolmivaiheinen asynkroninen sähkömoottori (keksi MO Dolivo-Dobrovolsky vuonna 1889). Asynkroniset moottorit ovat rakenteeltaan suhteellisen yksinkertaisia ja toimintavarmoja, mutta niillä on rajoitettu nopeusalue ja pieni tehokerroin pienillä kuormilla. Teho W murto-osista kymmeniin MW:iin.
1. Asynkroninen moottori
1.1 Magneettikentän ja roottorin pyörimistaajuus
Päästää n1 on magneettikentän pyörimistaajuus. Monivaiheinen vaihtovirtajärjestelmä luo pyörivän magneettikentän, jonka pyörimisnopeus minuutissa on n1=60f1/p, missä f1 on virran taajuus, p on staattorin kunkin vaiheen muodostamien napaparien lukumäärä. käämitys.
n2- roottorin pyörimistaajuus. Jos roottori pyörii taajuudella ei yhtä suuri kuin taajuus magneettikentän kierto (n2≠n1), tätä taajuutta kutsutaan asynkroniseksi. Asynkronisessa moottorissa työnkulku voi toimia vain asynkronisella taajuudella.
Käytön aikana roottorin nopeus on aina pienempi kuin pellon nopeus.
(n2< n1)
1.2 Asynkronisen moottorin toimintaperiaate
Asynkronisissa moottoreissa kolmivaiheinen järjestelmä luo pyörivän magneettikentän, kun se on kytketty vaihtovirtaverkkoon. Staattorin pyörivä magneettikenttä ylittää roottorikäämin johtimet ja indusoi niihin emf:n. Jos roottorin käämitys on suljettu kaikilta vastuksilta tai oikosuljettu, indusoidun emf:n vaikutuksesta. nykyiset kulkevat. Seurauksena roottorin käämin virran ja pyörivän vuorovaikutuksen vuorovaikutuksesta magneettikenttä staattorikäämitys luo vääntömomentin, jonka vaikutuksesta roottori alkaa pyöriä magneettikentän pyörimissuunnassa. Roottorin pyörimissuunnan muuttamiseksi on tarpeen vaihtaa mitkä tahansa kaksi kolmesta johdosta, jotka yhdistävät staattorin käämityksen verkkoon suhteessa verkkoliittimiin.
1.3 Asynkronisen moottorin laite
Staattorin ydin on rekrytoitu teräslevyistä, joiden paksuus on 0,35 tai 0,5 mm. Levyt on leimattu urilla ja kiinnitetty moottorin runkoon. Sänky asennetaan perustukselle. Sen käämin johtimet asetetaan staattorin pitkittäisiin uriin, jotka on kytketty toisiinsa siten, että muodostuu kolmivaiheinen järjestelmä. Staattorin käämien kytkemiseksi kolmivaiheiseen verkkoon ne voidaan kytkeä tähtiin tai kolmioon. Tämä mahdollistaa moottorin käynnistämisen verkossa eri jännitteillä. Pienemmillä jännitteillä (220/127 V) staattorin käämitys on kytketty kolmioon, korkeammilla jännitteillä (380/220 V) tähteen. Myös roottorin ydin on valmistettu 0,5 mm paksuisista teräslevyistä. Levyt on meistetty urilla ja koottu pakkauksiin, jotka asennetaan koneen akselille. Pakkauksista muodostetaan pitkittäisurallinen sylinteri, johon roottorin käämityksen johtimet asetetaan. Roottorin käämityksen tyypistä riippuen asynkroniset koneet voivat olla vaihe- ja oravahäkkiroottori. Oikosulkukäämitykseen ei voida sisällyttää vastusta. Vaihekäämityksessä johtimet on kytketty toisiinsa muodostaen kolmivaiheisen järjestelmän. käämit kolme vaihetta yhdistetty tähdellä. Roottorin käämitys voi olla oikosuljettu tai oikosuljettu. Oravahäkkiroottorilla varustetut moottorit ovat yksinkertaisempia ja halvempia, mutta vaiheroottorilla varustetuilla moottoreilla on paremmat käynnistys- ja säätöominaisuudet (niitä käytetään suurilla tehoilla). Asynkronisten moottoreiden teho vaihtelee useista kymmenistä wateista 15 000 kW:iin jopa 6 kV staattorikäämijännitteellä. Asynkronisten moottoreiden haittana on alhainen tehokerroin.
1.4 Asynkronisen moottorin toiminta kuormitettuna
n1 on staattorin magneettikentän pyörimistaajuus. n2- roottorin pyörimistaajuus.
n1 > n2
Staattorin magneettikenttä pyörii samaan suuntaan kuin roottori ja liukuu roottoriin nähden taajuudella ns = n1 – n2
Roottorin viive staattorin pyörivästä magneettikentästä on ominaista luistolle S = ns/n1, => S = (n1 - n2) / n1
Jos roottori on paikallaan, niin n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Jos roottori pyörii synkronisesti magneettikentän kanssa, niin jättämä S = 0.
Tyhjäkäynnillä eli kun moottorin akselilla ei ole kuormitusta, luisto on mitätön ja se voidaan ottaa 0:ksi. Roottorin akseliin kohdistuva kuormitus voi olla esimerkiksi sorvileikkuri. Se luo jarrutusmomentin. Jos vääntömomentti ja jarrutusmomentti ovat samat, moottori käy vakaasti. Jos akselin kuormitus on lisääntynyt, jarrutusmomentista tulee suurempi kuin vääntömomentti ja roottorin nopeus n2 vähentää. Kaavan mukaan S =(n1 - n2)/n1 lipsahdus lisääntyy. Koska staattorin magneettikenttä liukuu roottoriin nähden taajuudella ns = n1 – n2, silloin se ylittää roottorin johtimet useammin, niissä virta ja moottorin vääntömomentti kasvavat, mikä tulee pian yhtä suureksi kuin jarrutusmomentti. Kun kuormitus pienenee, jarrutusmomentti tulee pienemmäksi kuin vääntömomentti, kasvaa n2 ja pienenee S. EMF pienenee ja roottorin virta ja vääntömomentti ovat jälleen yhtä suuret kuin jarru. Magneettivuo koneen ilmavälissä pysyy suunnilleen vakiona kuormituksen muutoksilla.
2. Asynkronisen moottorin suorituskykyominaisuudet
Induktiomoottorin suorituskyky riippuu
S - lipsahdus
n2 - roottorin nopeus
M - kehittynyt hetki
I1 virrankulutus
P1 virransyöttö
COSφ tehokerroin
Koneen akselin hyötytehosta P2.
Nämä ominaisuudet poistetaan luonnollisissa olosuhteissa. Virran taajuus f1 ja jännite U1 pysyvät vakiona. Vain moottorin akselin kuormitus muuttuu.
Kun moottorin akselin kuormitus kasvaa, S kasvaa. Kun moottori on tyhjäkäynnillä, n2≈n1 ja S≈0. Nimelliskuormituksella luisto on tyypillisesti 3-5 %.
Kun moottorin akselin kuormitus kasvaa, pyörimisnopeus n2 pienenee. Nopeuden muutos kuormituksen noustessa nollasta nimellisarvoon on kuitenkin hyvin pieni eikä ylitä 5 %. Siksi oikosulkumoottorin nopeusominaisuus on jäykkä. Käyrän kaltevuus vaaka-akseliin nähden on hyvin pieni.
Vääntömomentti M, moottorin kehittämä, tasapainotetaan akselin jarrutusmomentilla Mt ja hetki М0, joka voittaa mekaaniset häviöt, eli M \u003d Mt + M0 \u003d P2 /Ω2+ М0, missä R2– hyödyllinen moottoriteho , Ω 2 - roottorin kulmanopeus. Tyhjäkäynnillä M = M0. Kuorman kasvaessa myös vääntömomentti kasvaa, ja roottorin nopeuden lievästä laskusta johtuen vääntömomentin kasvu tapahtuu nopeammin kuin akselin hyötyteho.
Moottorin verkosta kuluttama virta I1 vaihtelee epätasaisesti moottorin akselin kuormituksen kasvaessa. Tyhjäkäynnillä COSφ-tehokerroin on pieni. Ja virralla on suuri reaktiivinen komponentti. Moottorin akselin pienillä kuormituksilla staattorivirran aktiivinen komponentti on pienempi kuin reaktiivinen komponentti, joten virran aktiivisella komponentilla on vain vähän vaikutusta virtaan I1. Suurilla kuormituksilla staattorivirran aktiivinen komponentti tulee suuremmaksi kuin reaktiivinen ja kuormituksen muutos aiheuttaa merkittävän muutoksen virrassa I1.
Moottorin P1 kuluttaman tehon graafinen riippuvuus on kuvattu lähes suorana viivana, joka poikkeaa hieman ylöspäin suurilla kuormituksilla, mikä selittyy staattorin ja roottorin käämien häviöiden lisääntymisellä kuormituksen kasvaessa.
COSφ-tehokertoimen riippuvuus moottorin akselin kuormituksesta on seuraava. Tyhjäkäynnillä СOSφ on pieni, noin 0,2. Koska staattorivirran aktiivinen komponentti, koneen tehohäviöiden vuoksi, on pieni verrattuna tämän virran reaktiiviseen komponenttiin, mikä luo magneettivuon. Kun akselin kuormitus kasvaa, СOSφ kasvaa saavuttaen maksimiarvon 0,8–0,9 staattorivirran aktiivisen komponentin lisääntymisen seurauksena. Erittäin suurilla kuormituksilla COSφ laskee hieman, koska roottorin jättämän ja virtataajuuden merkittävän kasvun seurauksena roottorin käämin reaktanssi kasvaa.
Hyötysuhdekäyrä η on saman muotoinen kuin missä tahansa koneessa tai muuntajassa. Tyhjäkäynnillä hyötysuhde = 0. Kun moottorin akselin kuormitus kasvaa, hyötysuhde kasvaa jyrkästi ja laskee sitten. Hyötysuhde saavuttaa korkeimman arvonsa sellaisella kuormituksella, kun teräksen tehohäviöt ja mekaaniset häviöt, jotka eivät riipu kuormasta, ovat yhtä suuria kuin staattorin ja roottorin käämien tehohäviöt, jotka riippuvat kuormasta.
Samanlaisia abstrakteja:
Erilaisia asynkronisia johtavia mikromoottoreita: ontto ei-magneettinen ja magneettinen roottori; oikosuljetulla käämityksellä kuin oravapyörä. Kaavio magneettipiirin puolisuljetusta urasta. Pyörivän magneettikentän luominen kaksivaiheisella staattorilla.
Kolmivaiheisen asynkronisen koneen laite, sen pääelementit, tilat ja toimintaperiaate, luomis- ja käyttöhistoria nykyinen vaihe. Menettely ja ehdot pyörivän magneettikentän saamiseksi. Sähkömagneettisen vääntömomentin riippuvuus luistosta.
Vaihteiston, vinssin ja moottorin akseliin pienennetyn kuorman kokonaishitausmomentin määrittäminen. Akseluun vähennetyn vastusmomentin laskenta nousun ja laskeutumisen aikana. Vaihteiston akselin tehon arvo. Syy tehoeroon kuormaa nostettaessa ja laskettaessa.
Moottorin laskenta ja suunnittelu, päämittojen valinta, staattorikäämin laskenta. Staattorin hammasvyöhykkeen mittojen laskeminen ja ilmavälin valinta. Moottorin mallinnus MatLab Power System Blockset -ympäristössä sekä nimellistilaparametreilla.
Turbogeneraattorin pää- ja varasuojaus.
Laite ja ehdollinen kuva synkronisesta kolmivaiheinen kone. Staattorin ja roottorin magneettikentän napojen sijainti. Synkronisen koneen sähkömagneettisen vääntömomentin riippuvuus kulmasta. kaavio synkronisen moottorin sisällyttämisestä dynaamiseen jarrutukseen.
Yleistä tietoa asynkronisista koneista (kaksikäämi sähkökoneet vaihtovirta). Aktiiviosien suunnittelu, laakerikokoonpanot, asynkronisen mikromoottorin 4АА50В2 syöttölaite, toimintaperiaate, käyttöalueet ja merkitys.
Kolmivaiheisen asynkronisen sähkömoottorin suunnittelu oravahäkkiroottori. Moottorianalogin valinta, mitat, kokoonpano, magneettipiirin materiaali. Staattorin käämityskertoimen määritys, akselin ja vierintälaakerien mekaaninen laskenta.
Oravahäkkiroottorilla varustetun asynkronisen moottorin laskenta. Pääkokojen valinta. Staattorin hammasvyöhykkeen ja ilmaraon, roottorin, magnetointivirran mittojen laskeminen. Toimintatilan parametrit. Häviöiden laskeminen, toiminta- ja käynnistysominaisuudet.
Yleistä tietoa asynkronisista koneista. Yleistä tietoa asynkronisen moottorin toimintatavoista. Asynkronisen rekonstruktiokoneen toimintatilojen analyyttinen ja graafinen määrittely.
Yleistettyyn koneeseen perustuvan asynkronisen sähkömoottorin, jossa on oravahäkkiroottori tyyppi 4А160S4У3, kehittämisen ominaisuudet. Asynkronisen moottorin matemaattisen mallin laskenta Cauchyn muodossa 5. Asynkronisen moottorin suorakäynnistyksen mallin riittävyys.
Magneettipiirin laskentamenetelmä synkroninen generaattori, sen mittojen ja kokoonpanon valinta, koneen magnetoinnin ominaisuuksien rakenne. Käämitysparametrien määritys, lämpö- ja ilmanvaihtolaskelmien suoritus, generaattorin kokoonpanopiirustus.
Usein hyväksymättä jättäminen asynkroninen käynnistys synkroninen moottori, joka johtaa merkittävään jännitteen alenemiseen syöttöjärjestelmässä, merkittävien dynaamisten voimien esiintymiseen staattorikäämin etuosissa ja eristeen lämpövanhenemiseen.
Toimilaitteen kuormituskaavion rakentaminen. Virtapiirin elementtien valinta. Mekaanisten ominaisuuksien laskeminen. Nopeuspalautteen tarpeen arviointi. Järjestelmän keskimääräisen tehokkuuden määrittäminen. Ohimenevät prosessit taajuusmuuttajassa.
Yleistä tietoa laitteista automaattinen säätö synkronisten koneiden viritys. Jännitteeseen ja tehonsyöttöpiiriin vaikuttavat tekijät. Nykyinen sekoituslaite: Tarvittavat muutokset sekoituskoneen ominaisuuksiin.
Moottorin magneettipiiri. Mitat, kokoonpano, materiaali. Staattorin ydin, roottori ja napakappale. Magneettipiirin laskenta. Ilmarako, hampaat ja staattorin takaosa. Aktiivinen ja induktiivinen reaktanssi staattorin käämit vakaaseen tilaan.
TYÖTÄ SÄHKÖTEKNIIKKAA
"Asynkronisen moottorin suorituskykyominaisuudet"
Johdanto
asynkroninen sähkökone- tämä on vaihtovirtasähkökone, jossa roottorin nopeus ei ole yhtä suuri kuin staattorin magneettikentän nopeus ja riippuu kuormituksesta. Sitä käytetään pääasiassa moottorina ja generaattorina. Staattorissa on urat, joihin sijoitetaan yksi- tai monivaiheinen (yleensä kolmivaiheinen) käämitys, joka on kytketty verkkovirtaan. Tämä käämitys on suunniteltu luomaan liikkuva magneettikenttä, pyörivä pyöreä - kolmivaiheisille koneille ja sykkivä tai pyörivä elliptinen - yksivaiheisille koneille. Roottori on sähkökoneen pyörivä osa, joka on myös suunniteltu luomaan magneettikenttä, joka vuorovaikutuksessa staattorikentän kanssa johtaa sähkömagneettisen vääntömomentin luomiseen, joka määrittää energian muuntamisen suunnan. Generaattorien kohdalla tämä momentti on luonteeltaan jarruttava ja se vastustaa voimanlähteen vääntömomenttia, joka saa roottorin liikkeelle. Moottoreissa päinvastoin tämä hetki on ajamista, joka voittaa roottorin käyttämän mekanismin vastuksen.
Asynkroninen generaattori on asynkroninen sähkökone, joka toimii generaattoritilassa. Apulähde sähkövirta pieni teho ja jarrulaite (sähkökäytössä).
Asynkroninen sähkömoottori on asynkroninen sähkökone, joka toimii moottoritilassa. Yleisin kolmivaiheinen asynkroninen sähkömoottori (keksi MO Dolivo-Dobrovolsky vuonna 1889). Asynkroniset moottorit ovat rakenteeltaan suhteellisen yksinkertaisia ja toimintavarmoja, mutta niillä on rajoitettu nopeusalue ja pieni tehokerroin kevyillä kuormilla. Teho W murto-osista kymmeniin MW:iin.
1. Asynkroninen moottori
1.1 Magneettikentän ja roottorin pyörimistaajuus
Päästää n 1 on magneettikentän pyörimistaajuus. Monivaiheinen vaihtovirtajärjestelmä luo pyörivän magneettikentän, jonka pyörimisnopeus minuutissa on n1=60f1/p, missä f1 on virran taajuus, p on staattorin kunkin vaiheen muodostamien napaparien lukumäärä. käämitys.
n 2 - roottorin pyörimistaajuus. Jos roottori pyörii taajuudella, joka ei ole yhtä suuri kuin magneettikentän pyörimistaajuus (n2≠n1), tätä taajuutta kutsutaan asynkroniseksi. Asynkronisessa moottorissa työnkulku voi toimia vain asynkronisella taajuudella.
Käytön aikana roottorin nopeus on aina pienempi kuin pellon nopeus.
( n 2< n 1)
1.2 Asynkronisen moottorin toimintaperiaate
Asynkronisissa moottoreissa kolmivaiheinen järjestelmä luo pyörivän magneettikentän, kun se on kytketty vaihtovirtaverkkoon. Staattorin pyörivä magneettikenttä ylittää roottorikäämin johtimet ja indusoi niihin emf:n. Jos roottorin käämitys on suljettu kaikilta vastuksilta tai oikosuljettu, indusoidun emf:n vaikutuksesta. nykyiset kulkevat. Roottorikäämin virran ja staattorikäämin pyörivän magneettikentän vuorovaikutuksen seurauksena syntyy vääntömomentti, jonka vaikutuksesta roottori alkaa pyöriä magneettikentän pyörimissuunnassa. Roottorin pyörimissuunnan muuttamiseksi on tarpeen vaihtaa mitkä tahansa kaksi kolmesta johdosta, jotka yhdistävät staattorin käämityksen verkkoon suhteessa verkkoliittimiin.
1.3 Asynkronisen moottorin laite
Staattorin ydin on rekrytoitu teräslevyistä, joiden paksuus on 0,35 tai 0,5 mm. Levyt on leimattu urilla ja kiinnitetty moottorin runkoon. Sänky asennetaan perustukselle. Sen käämin johtimet asetetaan staattorin pitkittäisiin uriin, jotka on kytketty toisiinsa siten, että muodostuu kolmivaiheinen järjestelmä. Staattorin käämien kytkemiseen kolmivaiheinen verkko ne voivat olla tähti- tai kolmioliitäntöjä. Tämä mahdollistaa moottorin käynnistämisen verkossa eri jännitteillä. Pienemmillä jännitteillä (220/127 V) staattorin käämitys on kytketty kolmioon, korkeammilla jännitteillä (380/220 V) tähteen. Myös roottorin ydin on valmistettu 0,5 mm paksuisista teräslevyistä. Levyt on meistetty urilla ja koottu pakkauksiin, jotka asennetaan koneen akselille. Pakkauksista muodostetaan pitkittäisurallinen sylinteri, johon roottorin käämityksen johtimet asetetaan. Riippuen roottorin käämityksen tyypistä asynkroniset koneet voi olla kanssa vaihe ja oikosulku roottori. Oikosulkukäämitykseen ei voida sisällyttää vastusta. Vaihekäämityksessä johtimet on kytketty toisiinsa muodostaen kolmivaiheisen järjestelmän. Kolmen vaiheen käämit on yhdistetty tähdellä. Roottorin käämitys voi olla oikosuljettu tai oikosuljettu. Oravahäkkiroottorilla varustetut moottorit ovat yksinkertaisempia ja halvempia, mutta vaiheroottorilla varustetuilla moottoreilla on paremmat käynnistys- ja säätöominaisuudet (niitä käytetään suurilla tehoilla). Asynkronisten moottoreiden teho vaihtelee useista kymmenistä wateista 15 000 kW:iin jopa 6 kV staattorikäämijännitteellä. Asynkronisten moottoreiden haittana on alhainen tehokerroin.
1.4 Asynkronisen moottorin toiminta kuormitettuna
n 1 on staattorin magneettikentän pyörimistaajuus. n 2 - roottorin pyörimistaajuus.
n 1 > n 2
Staattorin magneettikenttä pyörii samaan suuntaan kuin roottori ja liukuu roottoriin nähden taajuudella n s = n 1 – n 2
Roottorin viive staattorin pyörivästä magneettikentästä on ominaista luistolle S = n s / n 1, => S = ( n 1 – n 2) / n 1
Jos roottori on paikallaan, niin n 2 =0, S = ( n 1 – n 2) / n 1, => S = n 1 / n 1 =1
Jos roottori pyörii synkronisesti magneettikentän kanssa, niin jättämä S = 0.
Tyhjäkäynnillä eli moottorin akselin kuormituksen puuttuessa luisto on mitätön ja se voidaan ottaa 0:ksi. Roottorin akseliin kohdistuva kuormitus voi olla esimerkiksi leikkuri. sorvi. Se luo jarrutusmomentin. Jos vääntömomentti ja jarrutusmomentti ovat samat, moottori käy vakaasti. Jos akselin kuormitus on lisääntynyt, jarrutusmomentista tulee suurempi kuin vääntömomentti ja roottorin nopeus n 2 vähentää. Kaavan mukaan S = ( n 1 – n 2) / n 1 lipsahdus lisääntyy. Koska staattorin magneettikenttä liukuu roottoriin nähden taajuudella n s = n 1 – n 2, silloin se ylittää roottorin johtimet useammin, niissä virta ja moottorin vääntömomentti kasvavat, mikä tulee pian yhtä suureksi kuin jarrutusmomentti. Kun kuormitus pienenee, jarrutusmomentti tulee pienemmäksi kuin vääntömomentti, kasvaa n 2 ja pienenee S . EMF pienenee ja roottorin virta ja vääntömomentti ovat jälleen yhtä suuret kuin jarru. Magneettivuo koneen ilmavälissä pysyy suunnilleen vakiona kuormituksen muutoksilla.
2. Asynkronisen moottorin suorituskykyominaisuudet
Induktiomoottorin suorituskyky riippuu
S - lipsahdus
n2 - roottorin nopeus
M - kehittynyt hetki
I1 virrankulutus
P1 tehonsyöttö
COSφ tehokerroin
Koneen akselin hyötytehosta P2.
Nämä ominaisuudet poistetaan luonnollisissa olosuhteissa. Virran taajuus f1 ja jännite U1 pysyvät vakiona. Vain moottorin akselin kuormitus muuttuu.
Kun moottorin akselin kuormitus kasvaa, S kasvaa. Kun moottori on tyhjäkäynnillä, n2≈n1 ja S≈0. Nimelliskuormituksella luisto on tyypillisesti 3-5 %.
Kun moottorin akselin kuormitus kasvaa, pyörimisnopeus n2 pienenee. Nopeuden muutos kuormituksen noustessa nollasta nimellisarvoon on kuitenkin hyvin pieni eikä ylitä 5 %. Siksi, nopeusominaisuus induktiomoottori on kova. Käyrän kaltevuus vaaka-akseliin nähden on hyvin pieni.
Vääntömomentti M, moottorin kehittämä, tasapainotetaan akselin jarrutusmomentilla Mt ja hetki M 0 , joka voittaa mekaaniset häviöt, eli M = Mt + M 0 =P 2 /Ω 2 + M 0 , missä R 2 – hyödyllinen moottoriteho , Ω 2 - roottorin kulmanopeus. Tyhjäkäynnillä M = M 0. Kuorman kasvaessa myös vääntömomentti kasvaa, ja roottorin nopeuden lievästä laskusta johtuen vääntömomentin kasvu tapahtuu nopeammin kuin akselin hyötyteho.
Moottorin verkosta kuluttama virta I1 vaihtelee epätasaisesti moottorin akselin kuormituksen kasvaessa. Tyhjäkäynnillä COSφ-tehokerroin on pieni. Ja virralla on suuri reaktiivinen komponentti. Moottorin akselin pienillä kuormituksilla staattorivirran aktiivinen komponentti on pienempi kuin reaktiivinen komponentti, joten virran aktiivisella komponentilla on vain vähän vaikutusta virtaan I1. Suurilla kuormituksilla staattorivirran aktiivinen komponentti tulee suuremmaksi kuin reaktiivinen ja kuormituksen muutos aiheuttaa merkittävän muutoksen virrassa I1.
Moottorin P1 kuluttaman tehon graafinen riippuvuus on kuvattu lähes suorana viivana, joka poikkeaa hieman ylöspäin suurilla kuormituksilla, mikä selittyy staattorin ja roottorin käämien häviöiden lisääntymisellä kuormituksen kasvaessa.
COSφ-tehokertoimen riippuvuus moottorin akselin kuormituksesta on seuraava. Tyhjäkäynnillä СOSφ on pieni, noin 0,2. Koska staattorivirran aktiivinen komponentti, koneen tehohäviöiden vuoksi, on pieni verrattuna tämän virran reaktiiviseen komponenttiin, mikä luo magneettivuon. Kun akselin kuormitus kasvaa, СOSφ kasvaa saavuttaen maksimiarvon 0,8–0,9 staattorivirran aktiivisen komponentin lisääntymisen seurauksena. Erittäin suurilla kuormituksilla COSφ laskee hieman, koska roottorin jättämän ja virtataajuuden merkittävän kasvun seurauksena roottorin käämin reaktanssi kasvaa.
Hyötysuhdekäyrä η on saman muotoinen kuin missä tahansa koneessa tai muuntajassa. Tyhjäkäynnillä hyötysuhde = 0. Kun moottorin akselin kuormitus kasvaa, hyötysuhde kasvaa jyrkästi ja laskee sitten. Suurin arvo Hyötysuhde saavutetaan sellaisella kuormituksella, kun kuormituksesta riippumattomat teräksen tehohäviöt ja mekaaniset häviöt ovat yhtä suuret kuin kuormituksesta riippuvat tehohäviöt staattorin ja roottorin käämeissä.
Sähkömagneettinen momentti
.
Saattaa loppuun mekaaninen voima moottori
syntyy roottorin pyörimisen seurauksena kulmanopeudella ω 2 momentin M em vaikutuksesta, ts.
P turkis \u003d M em ω 2 (2,19)
Tämä teho voidaan määrittää vastaavasta piiristä as Sähkövoima, joka erottuu ehdollisesta kuormitusresistanssista R hyvin ", kerrottuna staattorin vaiheiden lukumäärällä:
P turkis = m 1 (I 2") 2 R 2" (1-s) / s (2,20)
Perusteella (2.19) ja (2.20), ottaen huomioon (2.8), voimme kirjoittaa
M em \u003d (m 1 (I 2 ") 2 R 2 " / s) / ω 1 (2,21)
Laskettaessa momenttia kaavan (2.21) mukaan virta minä 2" määräytyy vastaavan jätteen vastaavalla piirillä (kuva 2.10).
Kaava (2.21) voidaan muuntaa korvaamalla siihen virran lauseke minä 2", saatu tietyillä olettamuksilla vastaavasta piiristä
M em \u003d (m 1 U 1 R 2 "/s) / ω 1 ((R 1 + CR 2 / s) 2 + (x 1 + Cx 2 ") 2) (2,22)
Kerroin C, joka syöttää kaavan (2.22), on moduuli monimutkainen kerroin FROM
= 1 + (z 1 /z m) joka näkyy muodonmuutoksen aikana. Oletuksena on ottaa huomioon vain kertoimen moduuli FROM
, koska sen argumentti oikeissa koneissa on hyvin pieni. Oikeissa koneissa (pois lukien mikrokoneet) FROM
= 1,03–1,08 ja klo laadullinen analyysi joskus ottaa FROM
=
1.
Lauseke (2.21) voidaan myös muuntaa ilmaisemalla roottorin aktiivinen jännitehäviö I 2 "R 2" / s EMF:n kautta kaavojen (2.15) ja (2.16) perusteella
I 2 "R 2" /s \u003d E 2 "cos ψ 2 (2,23)
Korvaamalla (2.23) arvolla (2.21) ja suorittamalla muunnoksia ottamalla huomioon (2.18) ja (2.12) saadaan
M em \u003d k F m I 2 "cos ψ 2 (2,24)
missä k- rakentava kerroin.
Kuten kohdasta (2.24) voidaan nähdä, sähkömagneettinen momentti on suoraan verrannollinen päämagneettivuon F m ja roottorivirran aktiivinen komponentti minä 2" cos ψ 2.
Vääntömomenttikaavat (2.21), (2.22) ja (2.24) saadaan moottorimoodille, mutta ne pätevät myös muille moodeille, kun otetaan huomioon luistoarvojen etumerkki ja alue s. Sähkömagneettisen vääntömomentin riippuvuus luistosta on esitetty graafisesti kuvassa. 2.11 (jatkuva viiva).
Tämän tyyppinen ominaisuus on helppo selittää kaavoilla (2.24), (2.15) ja (2.16). Liiston kasvaessa roottorin virta minä 2 kasvaa jatkuvasti, mutta muuttuu yhä induktiivisemmaksi - laskee cos ψ 2 kun roottorin virtojen taajuus kasvaa ja vastaavasti sen induktiivinen vastus. Tämän seurauksena roottorivirran aktiivinen komponentti ja vastaavasti sähkömagneettinen vääntömomentti ensin kasvavat ja sitten alkavat pienentyä.
Luistoa, jossa momentti saavuttaa maksimiarvon M max, kutsutaan kriittiseksi ja sitä merkitään scr:llä. Scr:n määrittämiseksi on välttämätöntä käyttää lauseketta (2.22) ottaa derivaatta dM em /ds ja rinnastaa se nollaan. Tuloksena olevan yhtälön ratkaisulla on muoto
s cr \u003d ±C R 2 " / √ (R 1 " + 2) (2,25)
Kun otetaan ensimmäinen approksimaatio C 1 ≈ 1 ja R 1 ≈ 0, saadaan
s cr = ±R 2" /(x 1+x2") (2.26)
Useimmat induktiomoottorit vaativat korkean hyötysuhteen. Siksi käämien aktiivinen vastus, erityisesti R2, joka määrää roottorin sähköhäviöiden tason, on yleensä pieni. Tässä tapauksessa kriittinen liukuma on alueella .
Korvataan (2.25) arvolla (2.22) ja saadaan lauseke maksimihetkelle:
M max = ± m 1 U 1 2 /2 ω 1 C [± R 1 + √(R 1 2 + (x 1 + Cx 2) 2)] (2.27)
"+"-merkki viittaa moottoritilaan, "-" - generaattoritilaan.
Kuten näet, suurin momentti on verrannollinen neliöön syöttöjännite, ei riipu roottoripiirin aktiivisesta resistanssista R2 ja tapahtuu suuremmalla luistolla, sitä suurempi on roottoripiirin aktiivinen vastus (kuva 2.11, katkoviiva, R2B >R2A).
Käynnistysmomentti moottori M p määritetään lausekkeella (2.22) for s = 1. Merkitys M p verrannollinen syöttöjännitteen neliöön ja kasvaa kasvaessa R2(katso kuva 2.11), saavuttaen maksiminsa klo s cr = 1.
Nimellisluiston snom, joka vastaa nimellismomenttia Mnom, kasvaa R2:n kasvaessa. Tähän liittyy roottoripiirin sähköhäviöiden lisääntyminen ja hyötysuhteen heikkeneminen. Asynkronisille moottoreille, joilla on pieni kriittinen jättäminen, S nom = 0,02 - 0,06.
Momenttien tasapainoyhtälö moottorin akselilla.
Moottorin kehittämä sähkömagneettinen momentti voittaa moottorin akseliin kohdistuvan kuormitusmomentin M n ja moottorin oman vastusmomentin M 0 (joutokäyntimomentti), jonka määräävät moottorin mekaaniset ja lisähäviöt. Tuloksena oleva momentti määrittää roottorin kiihtyvyyden arvon ja etumerkin:
dω / dt \u003d (M em - M 0 - M n) / J (2,28)
Missä J- pyörivien osien hitausmomentti - roottori ja kuorma.
Tämä on sähkökäytön liikkeen differentiaaliyhtälö, joka koostuu moottorista ja kuormasta, muutettuna muotoon
M em \u003d M 0 + M n + J (dω / dt) (2,29)
nimeltään moottorin akselin momenttien tasapainoyhtälö.
Tässä yhtälössä:
M 0 + M n \u003d M st- staattinen vastusmomentti,
J(dω/dt) = M dyn on dynaaminen vastuksen hetki.
Sähkömagneettinen momentti M uh miinus hetki M0 kutsutaan hyödylliseksi tai vääntömomentiksi akselilla ja merkitsevät M2. Yhtälöistä (2.28) ja (2.29) seuraa, että:
1) jos M uh = M st, sitten dω/dt = 0, ω
= const so. moottori toimii vakaassa (staattisessa) tilassa, kun taas M2 = M n;
2) jos M uh> M st, silloin roottorin kulmanopeus kasvaa, ts. moottori toimii ohimenevässä (dynaamisessa) tilassa;
3) jos M uh< M st, silloin roottorin kulmanopeus pienenee, ts. moottori käy transienttitilassa.
AT yleinen tapaus Momenttien tasapainon yhtälöä laadittaessa tulee ottaa huomioon momenttien merkit, jotka määräytyvät momenttien toimintasuunnan mukaan suhteessa positiiviseen pyörimissuuntaan. Jos moottori tuottaa sähkömagneettisen vääntömomentin, joka vaikuttaa positiiviseen suuntaan, vääntömomentti katsotaan positiiviseksi ( M uh> 0). Jos moottori menee jarrutustilaan, sen vääntömomentti alkaa toimia vastakkaiseen suuntaan ( M uh< 0).
Työmekanismin ja välityslaitteen luomat staattiset vastusmomentit ovat kahdenlaisia: reaktiivisia ja aktiivisia. Reaktiiviset vastusmomentit on aina suunnattu pyörimissuuntaa vastaan, ts. ovat estäviä ( M st< 0). К реактивным
моментам относятся моменты сил трения, в том числе в самом двигателе, моменты
сопротивления при резании металла на обрабатывающих станках и т.д. Активный момент
всегда действует в одном и том же направлении, независимо от направления вращения,
т.е. может либо препятствовать движению (M st> 0), tai osallistu siihen ( M st< 0). К активным
моментам относятся моменты сил тяжести, сил упругости пружин и т.д.
Mekaaniset ominaisuudet.
Induktiomoottorin luonnollisen mekaanisen ominaisuuden yhtälö on lauseke (2.21) tai (2.22), jossa luisto S on korvattu kulmanopeudella ω 2 kohdan (2.8) mukaan U 1 = vakio. Ominaisuuskaavio on esitetty kuvassa. 2.12, a.

Kuva 2.12
Arvioidaan mekaaninen ominaisuus stabiilisuuden, jäykkyyden ja lineaarisuuden suhteen.
Avoimessa käytössä olevan moottorin katsotaan toimivan vakaasti, jos se häiriön poistamisen jälkeen palaa automaattisesti alkuperäiseen toimintapisteeseen mekaanisella ominaisuudella. Mekaaninen ominaisuus moottori on roottorin kulmanopeuden riippuvuus sähkömagneettisesta vääntömomentista: ω 2 \u003d f (M em).Kuorman mekaaninen ominaisuus on moottorin akselin staattisen vastusmomentin riippuvuus kulmanopeudesta: M st \u003d f (ω 2).
Teoriassa moottorin vakaan tilan toiminta on mahdollista pisteissä A 1 ja A 2, missä M uh=M st.A. Anna moottorin käydä kuormalla M st.A \u003d const pisteessä A 1 ja ilmaantuu häiriö, joka johtaa kulmanopeuden kasvuun??. Moottori tuottaa sitten pistettä vastaavan vääntömomentin A 1", ja kuorma on pistettä vastaava vastusmomentti A 1. Jossa M uh<M st, momenttitasapainoyhtälön mukaisesti, kulmanopeus ω 2 pienenee ja moottori palaa pisteeseen A 1. Palaa asiaan A 1 tapahtuu myös negatiivisella nopeuden lisäyksellä (kohta A 1""). Jos moottori käy kuormituksella pisteessä A 2, sitten nopeuden nousuun johtavan häiriön yhteydessä moottori luo pistettä vastaavan vääntömomentin A 2", ja kuorma on pistettä vastaava vastusmomentti A 2. Jossa M uh>M st ja kulmanopeus kasvaa edelleen, moottori siirtyy poispäin pisteestä A 2. Palaa asiaan A 2 ei tapahdu edes negatiivisella nopeuden lisäyksellä (kohta A 2""). Tässä tapauksessa nopeus laskee edelleen, kunnes moottori sammuu.
Siksi pisteessä A 1 moottori käy tasaisesti ja pisteessä A 2- epävakaa. Yleisessä tapauksessa muodollinen merkki moottorin vakaasta toiminnasta on epätasa-arvo
(dM em /dω 2)< (dM ст /dω 2) (2.30)
Nopeudesta riippumattomalla kuormitusmomentilla, ts. klo M st \u003d miinukset t, tämä epätasa-arvo saa muodon
(dω 2 /dM em)< 0 (2.31)
Moottorin vakauden käsitteen perusteella avoimessa ajossa on tapana kutsua moottorin mekaanista ominaisuutta vakaaksi, jos se varmistaa moottorin vakaan toiminnan M st \u003d const.
Jos käytämme muodollista vakauskriteeriä (2.31), niin se on helppo osoittaa for M st \u003d const moottorin vakaa toiminta varmistetaan vain alueella alkaen ω 1 ennen ω 2kr. Juoni alkaen ω 2kr 0 asti on epävakaa. Asynkronisilla moottoreilla varustettujen sähkökäyttöjen vääntömomenttien ja kierrosnopeuksien toiminta-alue valitaan moottorin mekaanisten ominaisuuksien vakaan osan sisällä. Nimelliskuormituspiste M nim on sijoitettu työskentelyalueelle siten, että ylikuormituskapasiteetti K m \u003d M max / M nom \u003d 1,7 -3,5. Pienellä roottorin resistanssilla R2 kriittinen nopeus ω 2kr \u003d (0,8 - 0,9) ω 1 ja työalue on kova. Mekaaninen ominaisuus on yleensä epälineaarinen, mutta sen työalue on lähellä lineaarista.
Työalueella moottori säätelee itseään. Moottorin akselin vastusmomentin kasvu alkaen M st.v ennen M st.s johtaa roottorin kulmanopeuden laskuun alkaen ω 2v ennen ω 2s, pyörivän kentän roottoriin indusoiman EMF:n ja virran kasvu ja vastaavasti sähkömagneettisen momentin kasvu arvoon, joka on yhtä suuri kuin vastusmomentin uusi arvo (siirtymä pisteestä AT tarkalleen FROM mekaanisista ominaisuuksista).
Käyttöominaisuudet
.
Induktiomoottorin suorituskykyominaisuudet ovat roottorin kulmanopeuden riippuvuuksia ω 2, hyödyllinen hetki M 2, tehokkuutta η
, tehokerroin cos φ 1(φ 1- vaihesiirto välillä U 1 ja minä 1) ja staattorin virta minä 1 hyötytehosta P2 at U 1 = U nom ja f1 = f nim(Kuva 2.12, b). Suorituskykyominaisuudet voidaan ottaa joko kokeellisesti tai laskea käyttämällä vastaavaa piiriä.
Kun vaihdat x.x:stä. (moottori ei ole kuormitettu) nimelliskuormitustilaan, roottorin kulmanopeus pienenee hieman, koska ω 2 \u003d (1 - s) ω 1, a S nim, kuten todettiin, on prosentin yksikkö. Näin ollen hyödyllinen hetki M 2 \u003d P 2 / ω 2 kasvaa lähellä lineaarista lain mukaan. Staattorin virran muutos määräytyy roottorin vasteen perusteella; virran suhteellisen suuri arvo tyhjäkäynnillä johtuu ilmaraosta. Nykyinen x.x. enimmäkseen induktiivinen ja vastaavasti alhainen cos φ 10- noin 0,1 - 0,2. Kuorman kasvaessa kulutettu aktiivinen sähköteho kasvaa ja cos φ 1 kasvaa - sen enimmäisarvo saavuttaa 0,7 - 0,9. Virta säilyttää aktiivi-induktiivisen luonteen ( φ 1>0) ja syöttöverkko on kuormitettu loisvirralla. Moottorin tehokkuus η \u003d R 2 / R 1, missä R 1- moottorin käyttämä aktiivinen sähköteho. Symmetrisellä voimalla R 1 \u003d m 1 U 1 I 1 cos φ 1, missä U 1, minä 1– vaihejännite ja virta. Tehokkuuden riippuvuus tehosta P 2 \u003d P 1 -Δp e -Δp m -Δp turkki on saman näköinen kuin muuntaja, koska moottorissa häviöt jaetaan myös kiinteisiin ja muuttuviin häviöihin. Pienen ja keskitehoisen koneen hyötysuhteen maksimiarvo η
= 0,7 - 0,9, kun taas pienemmät arvot viittaavat pienempitehoisiin moottoreihin, joilla on suhteellisesti korkeampi käämien aktiivinen vastus.
Suosittelemme lukemaan
 Nuorten lasten psykologiset ominaisuudet
Nuorten lasten psykologiset ominaisuudet Lapsen siirto toiseen kouluun - menettely ja vaadittavat asiakirjat Siirretäänkö lapsi toiseen kouluun
Lapsen siirto toiseen kouluun - menettely ja vaadittavat asiakirjat Siirretäänkö lapsi toiseen kouluun, diagnoosi, hoito Urogenitaalisen klamydian hoito") Urogenitaalisen klamydian kuvaus, syyt, oireet (merkit), diagnoosi, hoito Urogenitaalisen klamydian hoito
Urogenitaalisen klamydian kuvaus, syyt, oireet (merkit), diagnoosi, hoito Urogenitaalisen klamydian hoito Hyödyt ja merkitys hydroaminohapon treoniinin ihmiskeholle L treoniini mitä
Hyödyt ja merkitys hydroaminohapon treoniinin ihmiskeholle L treoniini mitä

