The electric motor is the main driving force of the electric drive. About which electric motor to choose for linear mechanisms is described in this article.
| Type of electromechanism | Engine type included |
| ATL 10, BSA 10 |
with and without brake |
|
AC 1-phase, AC 3-phase, DS 24/12 V with and without brake |
|
|
AC 3-phase with and without brake |
|
| UAL 0 UBA 0 | DS 24 V 12 V with and without brake |
|
AC 1-phase, AC 3-phase, DS 24/12 V with and without brake |
Main technical characteristics
Before choosing a motor, it is important to understand the following physical characteristics:
Rated power - mechanical power, measured on the shaft, is expressed in units of Watt or KiloWatt. However, in some products, power is calculated in horsepower.
Rated voltage - the voltage that must be applied to the motor terminals, in accordance with the specifications.
Static torque(starting torque) is the minimum torque that the motor can provide, with the rotor at idle and at rated frequency voltage.
Intermediate torque- the minimum value of the torque that develops from supplying the motor with a rated voltage and frequency, from 0 rpm to a speed corresponding to the maximum torque.
Max Torque - maximum moment, which the motor can develop during operation with the rated voltage and frequency supply.
Rated torque- the torque corresponds to the rated power and the rated speed.
The rated torque is calculated using the formula:
Pn - rated power, kW
n- nominal number of revolutions, rpm
Synchronous speed, calculated from the trace. formula:
![]()
f - frequency feed, Hz
p - number of pairs of poles
Torque diagram

Operating conditions
Humidity - electrical equipment must be operated at a relative humidity of 30% to 90% (non-condensing)
It is necessary to eliminate negative effects from accidental condensation by means of a protected enclosure of electrical equipment or, if necessary, by additional measures (for example, built-in heating equipment or air conditioning system, drainage holes).
The altitude and temperature indicated in the power catalog are intended for regular use at an altitude below 1000 m above sea level and at room temperature from +5 °C to +40 °C for motors with a rated power below 0.6 kW, or at temperatures from -15 °C to 40 °C for motors with a rated power equal to or greater than 0.6 kW. Under other operating conditions (higher altitude and/or temperature) the values change according to the coefficient indicated on the graph.

Three-phase or single-phase motors have a clockwise direction of movement. Anti-clockwise - on request.
Voltage - Frequency: maximum change in voltage supply +/-10%. With this tolerance, the motors supply the rated power. Long-term operation within these limits may increase the temperature by 10 degrees C. The standard winding is rated for 230/400V, 50Hz. Other frequency voltages are available upon request.
Speed - torque: with the exception of the four-pole version, the motors are standard. It is not recommended to use torques higher than the rated ones.
The stator winding is made of enameled copper wire(class H, 200 degrees), with modified polyamide ethers polyamides.
Insulation class F is impregnated with polymers, which provides a high degree of protection against electrostatic stress and mechanical stress. The winding is tight, without air pockets and with a high degree of heat transfer. Other materials from which the mass production of windings is made have insulation class B, but on request we put class H.
Tropical and marine motors: high degree of protection, which is used for motors operating in tropical climates with a high degree of humidity and adverse operating conditions, the winding is coated with a layer of high-quality glycerophthalic, which has excellent protective characteristics.
| brand | A photo | Type of | Voltage and frequency | Range of dimensions and capacities | Notes |
| M | Asynchronous three-phase electric motors general industrial design |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V RPM: 3000/1500/1000/750 |
Dimensions, mm: 50-160 Power, kW: 0.02-18.7 |
Sizes 71-160 adapted for use with frequency control. Shaft fan, protection class IP 55F |
|
| D.P. | Asynchronous three-phase multi-speed electric motors |
V/Hz: 400/50 +/- 10%V 3000/1000, 3000/750, 1000/750, 3000/750 |
Dimensions, mm: 63-160 Power, kW: 0.06-18.7 |
Motor shaft fan, protection class IP55F | |
| MQ | Asynchronous three-phase electric motors with a square casing |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V RPM:1500 |
Dimensions, mm: 63-90 Power, kW: 0.18-1.5 |
Sizes 80-90 are adapted for use with frequency control. Shaft fan, protection class IP55F |
|
| MM | Asynchronous single-phase electric motors with built-in capacitor |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensions, mm: 50-100 Power, kW: 0.045 - 2.2 |
Shaft fan. Protection class IP55F. Delivery with built-in or docked capacitor. |
|
|
with voltage cut-off relay |
V/Hz: 230/50 +/- 5%V RPM:3000/1500/1000 |
Dimensions, mm: 63-100 Power, kW: 0.187 - 2.2 |
Forced ventilation. Protection class IP55F. Supplied with integrated or docked capacitor. Centrifugal switch. Built-in voltage supply/shutdown relay |
||
| MDE | Asynchronous single-phase electric motors with built-in electronic relay |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensions, mm: 63-100 Power, kW: 0.187 - 2.2 |
Shaft fan. Protection class IP55F. Supplied with built-in or attached condenser. Equipped with an electronic start relay. |
|
| MA | Asynchronous three-phase electric motors with brake |
V/Hz: 230/400/50 +/- 10%V V/Hz: 266/460/60 +/- 10%V RPM: 3000/1500/1000/750 |
Dimensions, mm: 55-160 Power, kW: 0.02 - 18.7 |
Shaft fan. Protection class IP55F. Brake protection class IP44, on request IP55. Possible |
|
| MADP | Asynchronous three-phase multi-speed electric motors with brake |
V/Hz: 400/50 +/- 10%V RPM: 3000/1500, 1500/1000, 1500/750, 3000/1000, 3000/750, 1000/750, 3000/500 |
Dimensions, mm: 63-160 Power, kW: 0.06 - 18.7 |
Delivery with double brake and manual release. |
|
| MMA | Asynchronous single-phase electric motors with brake |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensions, mm: 50-100 Power, kW: 0.09 - 2.2 |
Shaft fan. Protection class IP55F. Brake protection class IP44, on request IP55. Possible Delivery with double brake and manual release. |
|
|
Asynchronous single-phase electric motors with centrifugal switch with voltage cut-off relay with brake |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensions, mm: 63-100 Power, kW: 0.187 - 2.2 |
Shaft fan. Protection class IP55F. Brake protection class IP44, on request IP55. Possible Delivery with double brake and manual release. |
||
|
Asynchronous single-phase electric motors with built-in electronic relay with brake |
V/Hz: 230/50 +/- 5%V RPM: 3000/1500/1000 |
Dimensions, mm: 63-122 Power, kW: 0.187 - 2.2 |
Shaft fan. Protection class IP55F. Brake protection class IP44, on request IP55. Possible Delivery with double brake and manual release. |
||
|
Vector control motors (Servomotors) |
Single phase network: V/Hz: 230/50-60 +/-10% V Three-phase network: V/Hz: 400/50-60 +/-10% V RPM: 3000 |
Dimensions, mm: 63 - 160 Moment, N * m: 2.6 - 42 |
Programming via remote control or computer |
||
|
Electric motors with built-in encoders |
Single phase network: V/Hz: 230/50-60 +/-10% V Three-phase network: V/Hz: 400/50-60 +/-10% V RPM: 3000 |
Dimensions, mm: 63 - 160 Moment, N * m: 2.6 - 160 |
Preservation of torque at a speed of rotation from 0 to maximum. High positioning accuracy. Forced ventilation |
||
|
Electric motors with built-in speed controllers |
Single phase network: V/Hz: 230/50-60 +/- 10% V Three-phase network: V/Hz: 400/50-60 +/-10% V Number of poles: 2/4/6 |
Dimensions, mm: 71 - 112 Moment, kW: 0.12 - 4 |
Inexpensive version of the electric motor with frequency control. Forced ventilation Built-in brake, thermal protection device. Remote control. |
By all categories Brands Pressure sensors, encoder Capacitor units Soft starters Frequency converters Pumps Circuit breakers thermostats Transformer substations Power transformers Gearmotors Control stations Electrical cabinets Terms Electric motors
One of the important parameters of the electric motor, which is just as important when choosing it, is torque. This value is determined by the product of the force applied to the lever arm and depends solely on the degree of load. If in internal combustion engines this load is given by the crankshaft, then the torque value is obtained from the excitation currents. In this case, the magnitude of this moment will depend on the speed of the device rotating in the magnetic field of the stator, called the rotor. Depending on the period and method of determination, the torque is divided into:
- static (starting) - minimum idle moment;
- intermediate - develops the value during engine operation from 0 rpm to the maximum value in the nominal voltage value;
- maximum - developing during engine operation;
- nominal - corresponds nominal values power and rpm.
To calculate the torque value, which is defined in "kgm" (kilogram per meter) or "Nm" (newton per meter), many electrical manuals offer special formulas that take into account, in addition to the main action of the rotating magnetic field a number of different factors, for example:
- network voltage;
- the value of inductive and active resistance;
- dependent on slip increase.
But, slip growth doesn't always bring high momentum. Often, when critical values are reached, its sharp decrease is observed. This phenomenon is referred to as the overturning moment. One of the devices that stabilize the speed of rotation of the rotor, and hence the magnitude of the torque is frequency converter, the use of which is now very common in all areas where the success of multiple production tasks depends on the control of the engine.
Choosing an electric motor for torque
For the choice required for the performance of certain tasks of the electric motor, almost all of its characteristics are taken into account, from power indicators to weight and size parameters. Each of the elements is important in its own way in solving the nuances. No less important is the torque. Due to the fact that the torque is directly related to the revolutions in the ratio: the greater the revolutions themselves, the less the moment will be, the choice of the electric motor will be based on the following nuances:
- from speed requirements. In this case, it will be more useful to choose a motor for low torque for those working with low forces and at high speed, and with medium or high starting torques for those working in enhanced modes. At low speeds;
- starting voltages. Here, the primary force is taken into account, for example, to control the elevator, high-speed motors should be selected. starting torque capable of lifting large loads from the start. Although many articles about electric motors It is also recommended to use soft starters that can protect against unwanted overloads.
It is worth remembering that the choice is not made according to one of the indicators, even when oriented relative to torque, because each of the indicators is oriented according to the working predisposition of the electrical drive device and its workloads in the statistical and dynamic operating conditions specified by the enterprise itself.
In this section, we have posted a selection of articles devoted to such an important concept in the theory of asynchronous drive as a moment. Here readers will find materials revealing the meanings of individual terms one way or another related to the concept of the moment. Additionally, we have organized a selection of articles with formulas by which you can calculate specific values of the moments or build their dependencies. For greater clarity, here you can also find examples illustrating the use of formulas for calculating a particular indicator.
load moment is the moment generated by the rotating mechanical system attached to the shaft induction motor. The term moment of resistance is found as synonyms in the literature. The load torque depends on the geometric and physical parameters of the bodies included in the kinematic chain attached to the motor shaft. As a rule, when calculating the moment of resistance, it is customary to bring it to the motor shaft.
Braking torque- moment developed asynchronous machine, in braking mode. In the literature, there is a synonym for the term: braking torque. Within the framework of the theory asynchronous electric motors 3 braking modes are considered: regenerative, dynamic and reverse current braking.
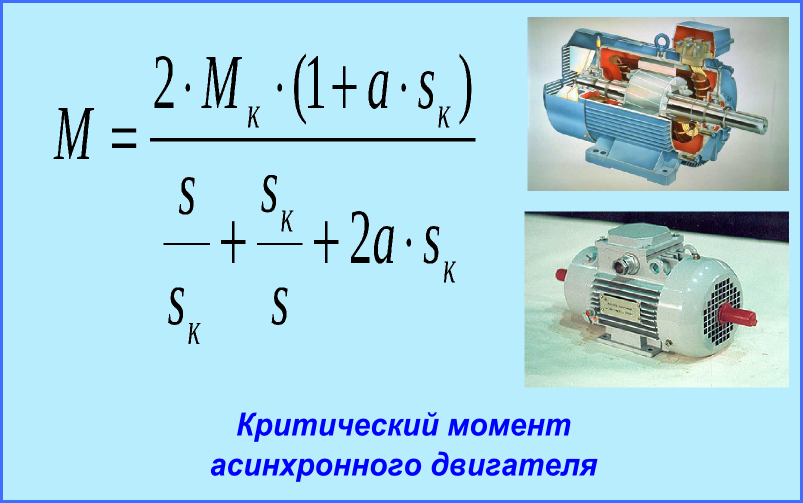 Critical moment of an induction motor – highest value moment developed by the electric motor. The moment reaches this value at critical slip. If the load torque on the motor shaft is greater than the critical torque, the motor will stop.
Critical moment of an induction motor – highest value moment developed by the electric motor. The moment reaches this value at critical slip. If the load torque on the motor shaft is greater than the critical torque, the motor will stop.
 Rated torque of asynchronous motor- the moment that occurs on the motor shaft at rated power and rated speed. Rated data is understood as data that are determined when the engine is operating in the mode for which it was designed and manufactured.
Rated torque of asynchronous motor- the moment that occurs on the motor shaft at rated power and rated speed. Rated data is understood as data that are determined when the engine is operating in the mode for which it was designed and manufactured.
| Concept of moment |
 Electromagnetic moment- the moment that occurs on the motor shaft when flowing through its windings electric current. Synonyms for this term are found in the literature: motor torque or electric motor torque. Variations with a more detailed formulation are also often encountered: electromagnetic torque or electromagnetic torque.
Electromagnetic moment- the moment that occurs on the motor shaft when flowing through its windings electric current. Synonyms for this term are found in the literature: motor torque or electric motor torque. Variations with a more detailed formulation are also often encountered: electromagnetic torque or electromagnetic torque.
This is one of the key parameters of the theory, which determines the ability of an asynchronous motor to rotate the load connected to its shaft in the required static and dynamic modes. For this reason, when deciding whether to use the motor for a specific task, it is important to take into account the nature of the behavior of the electromagnetic torque. In the very general case electromagnetic moment on the motor shaft is determined by the formula: Mem \u003d (? Ef x If) /? 2
 Within the framework of the modern theory of asynchronous electrical machines use a number of terms related to the concept of moment. Some of these terms refer to the moment created on the shaft (on the rotor) of the electric motor. Another group of terms defines the moments created by a mechanical load connected to the shaft of an electric motor.
Within the framework of the modern theory of asynchronous electrical machines use a number of terms related to the concept of moment. Some of these terms refer to the moment created on the shaft (on the rotor) of the electric motor. Another group of terms defines the moments created by a mechanical load connected to the shaft of an electric motor.
These terms define both the moment developed by the engine and the various states of the moment on the output shaft of the engine. The state means the value of the moment at the critical points. For example rated torque or starting torque.
We advise you to read
, diagnosis, treatment Treatment of urogenital chlamydia") Chlamydia urogenital - description, causes, symptoms (signs), diagnosis, treatment Treatment of urogenital chlamydia
Chlamydia urogenital - description, causes, symptoms (signs), diagnosis, treatment Treatment of urogenital chlamydia The benefits and significance of hydroamino acid threonine for the human body L threonine what
The benefits and significance of hydroamino acid threonine for the human body L threonine what To wait or not to wait for a guy from the army For what reason can they be commissioned from the army
To wait or not to wait for a guy from the army For what reason can they be commissioned from the army Baked apples with cottage cheese Baked apples with cottage cheese
Baked apples with cottage cheese Baked apples with cottage cheese

