ในหลายกรณี มอเตอร์แบบอะซิงโครนัสสามเฟสใช้สำหรับไดรฟ์ที่ไม่ต้องการการควบคุมความเร็ว แต่มอเตอร์แบบอะซิงโครนัสมีข้อดีที่มีคุณค่า: ความน่าเชื่อถือ ต้นทุนต่ำ การออกแบบที่เรียบง่าย ประสิทธิภาพสูง และน้ำหนักที่ค่อนข้างต่ำ ด้วยเหตุผลเหล่านี้ จึงเป็นเรื่องปกติที่จะลองนำไปใช้กับไดรฟ์แบบปรับความเร็วได้ด้วยเช่นกัน
เราต้องการข้อมูลเฉพาะเพิ่มเติมเกี่ยวกับผลลัพธ์ที่คุณต้องการ เครื่องหมาย; มีหลายวิธีในการเร่งความเร็วของคุณ มอเตอร์สามเฟส. วิธีแก้ไขที่ไม่รุกรานคือการเพิ่มไดรฟ์ความถี่แบบแปรผัน ซึ่งบางครั้งเรียกว่าตัวแปลงความเร็ว โปรดทราบว่าเมื่อความเร็วเพิ่มขึ้น แรงบิดจะลดลงหากคุณเกินความเร็วที่กำหนดของเครื่องยนต์ เรายินดีที่จะช่วยคุณพิจารณาว่าแนวทางใดต่อไปนี้เหมาะสมที่สุดสำหรับการสมัครของคุณ หากมอเตอร์ของคุณมีสวิตช์แบบแรงเหวี่ยงในวงจรสตาร์ท คุณจะไม่สามารถเพิ่มความเร็วของมอเตอร์ได้มากนัก
- นี่เป็นคำถามทั่วไป
- ถ้าคุณต้องการ ข้อมูลเพิ่มเติม,กรุณาโทรหาเรา
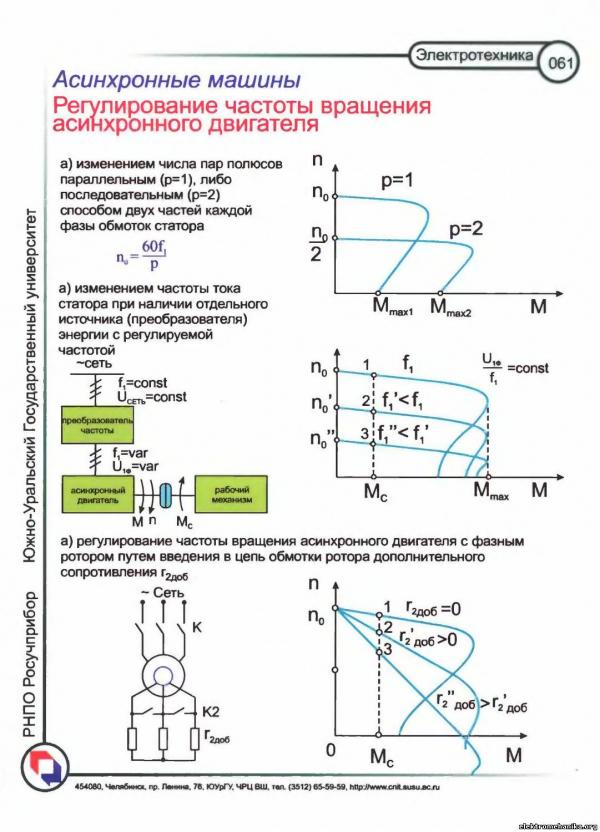
ในการควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอกมักใช้วิธีควบคุมความถี่ซึ่งเป็นการควบคุมความเร็วที่ราบรื่น สนามแม่เหล็กโดยการควบคุมความถี่ของกระแสในขดลวดสเตเตอร์และวิธีการเปลี่ยนจำนวนคู่ของขั้วของสนามแม่เหล็กหมุนซึ่งความถี่ของการหมุนของสนามแม่เหล็กจะเปลี่ยนไปอย่างกะทันหัน
ปัญหาจะอยู่ที่มอเตอร์ไฟฟ้าทำงานต่ำมากที่ 300 รอบต่อนาทีหรือไม่? แม้แต่ระดับความสูงที่คุณใช้งานเครื่องยนต์ก็มีความสำคัญ เนื่องจากอากาศที่ระดับความสูงสูงกว่าจะมีความหนาแน่นน้อยกว่า ดังนั้นจึงไม่ได้ให้ผลการระบายความร้อนแบบเดียวกัน ในพื้นที่ภูเขา อาจจำเป็นต้องลดภาระงานแม้จะใช้ความเร็วเต็มที่เพื่อให้แน่ใจว่าเครื่องยนต์จะเย็นลงอย่างเพียงพอ ลักษณะเฉพาะของแอปพลิเคชันของคุณมักจะต้องใช้มอเตอร์ประสิทธิภาพสูงและพัดลมความเร็วคงที่ ค่าใช้จ่ายของพัดลมเสริมจะขึ้นอยู่กับขนาดของโครงมอเตอร์และอาจต้องมีการประดิษฐ์เพื่อหาวิธีติดตั้ง ขอบคุณสำหรับคำแนะนำใด ๆ ที่คุณสามารถให้ฉัน!
ในการควบคุมความเร็วของการหมุนของมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์แบบเฟส จะใช้วิธีการควบคุมแบบรีโอสแตติก ซึ่งเป็นการควบคุมที่ราบรื่นของการลื่นของโรเตอร์โดยการเปลี่ยนความต้านทานเชิงแอ็คทีฟของขดลวดเฟส
การควบคุมความถี่ วิธีการควบคุมความเร็วที่มีแนวโน้มมากที่สุด มอเตอร์เหนี่ยวนำเป็น สเตเตอร์ควบคุมความถี่กระแสสลับเครื่องยนต์. ความเร็วเชิงมุมของสนามหมุน n = 2 f/r ดังนั้น เมื่อความถี่ปัจจุบัน f เปลี่ยนแปลง ความเร็วเชิงมุมของสนามจะเปลี่ยนตามสัดส่วน อย่างไรก็ตาม เมื่อทำการควบคุมความถี่ของกระแสไฟ จะต้องคำนึงว่าจำเป็นต้องมีการควบคุมแรงดันไฟฟ้าพร้อมกัน นี่เป็นเพราะความจริงที่ว่า EMF ของเฟสเป็นไปตามนิพจน์ (14.10) และด้วยเหตุนี้แรงดันไฟฟ้าของแหล่งจ่ายจึงเป็นสัดส่วนกับความถี่และกระแสปัจจุบัน เนื่องจากฟลักซ์ต้องเท่าเดิมในทุกโหมด แรงดันไฟต้องเป็น (โดยไม่คำนึงถึงแรงดันตกคร่อมในเครื่อง) ตามสัดส่วนกับความถี่ นอกจากนี้ นี่เป็นสิ่งจำเป็นเพื่อที่ว่าเมื่อความเร็วของเครื่องยนต์เปลี่ยนแปลง แรงบิดของเครื่องยนต์จะไม่เปลี่ยนแปลง
หลายจุด มอเตอร์เฟสเดียวไม่ใช่มอเตอร์แบบหลายความเร็ว แต่เป็นมอเตอร์แบบหลายแรงดัน เมื่อใช้ก๊อกม้วนเพื่อเพิ่มความต้านทานของวงจร มอเตอร์จะอ่อนแรงและโหลดทำให้มอเตอร์ทำงานช้าลง ถอดโหลดและมอเตอร์จะทำงานที่ความเร็วเท่ากันโดยไม่คำนึงถึงเครนที่เลือก หากมอเตอร์ถูกใช้เป็นมอเตอร์พัดลม สามารถเพิ่มรีโอสแตทไปยังสายอินพุตได้โดยเพิ่มความต้านทานภายนอกและหน่วงมอเตอร์เพื่อให้ได้ความเร็วที่ต้องการ หากคุณต้องการความเร็วที่เฉพาะเจาะจงมากกว่าช่วงของความเร็ว คุณสามารถเพิ่มการวัดความต้านทานของตัวอย่างและอากาศ เพียงจำไว้ว่าหากภาระงานของคุณเปลี่ยนไป ความเร็วของคุณก็จะเปลี่ยนไปเช่นกัน เราสามารถเปลี่ยนขั้วของมอเตอร์เหนี่ยวนำ 3 เฟสได้หรือไม่?
ในการประเมินลักษณะการพึ่งพาของแรงบิดต่อความถี่ของกระแสในขดลวดสเตเตอร์และแรงดันบนนั้นเราละเลยในสมการ (14.28) ความต้านทานเชิงแอคทีฟของขดลวดสเตเตอร์ g lและ ปฏิกิริยาอุปนัยการกระเจิงของขดลวดสเตเตอร์ x pac 1 และโรเตอร์ x ras 2 และใช้นิพจน์สำหรับความถี่สลิป (14.13):
Mvr= = เอ,
โปรดบอกฉันถึงผลที่ตามมา ได้ คุณสามารถหมุนขดลวดอีกครั้งเพื่อเปลี่ยนขั้วแม่เหล็กได้ แต่ในการทำเช่นนั้น คุณจะต้องเปลี่ยนลักษณะอื่นๆ อีกสองสามประการของขดลวด ในการเพิ่มจำนวนขั้ว คุณต้องเปลี่ยนช่วง ขนาดลวด และรอบต่อม้วนเพื่อให้เหล็กด้านหลังและความหนาแน่นฟลักซ์แม่เหล็กของฟันเป็นไปตามมาตรฐานปกติ การรักษาจำนวนรอบเท่าเดิมจะทำให้เครื่องยนต์อ่อนแอลง ส่งผลให้ความสามารถในการสร้างแรงบิดลดลง มอเตอร์เหนี่ยวนำด้วย โรเตอร์กรงกระรอกสร้างเครื่องกำเนิดไฟฟ้าที่ยอดเยี่ยมเมื่อเคลื่อนที่เหนือความเร็วแบบซิงโครนัส
ที่ไหน แต่= คอนสตรัค
ดังนั้นเมื่อเปลี่ยนความถี่ของกระแสเพื่อรักษาแรงบิดให้คงที่จึงจำเป็นต้องเปลี่ยนแรงดันไฟฟ้าบนสเตเตอร์ตามสัดส่วน กล่าวอีกนัยหนึ่งเงื่อนไขในการรักษาแรงบิดของมอเตอร์ให้คงที่ระหว่างการควบคุมความถี่จะเป็น U 1 /f= คอนสตรัค หากคุณปรับความถี่ของกระแสและแรงดันโดยปฏิบัติตามเงื่อนไขที่กำหนดแล้วลักษณะทางกลของมอเตอร์จะยังคงแข็งแกร่งและ ช่วงเวลาสูงสุดแทบไม่ขึ้นกับความถี่ (ลดลงอย่างมากเมื่อเทียบเท่านั้น ความถี่ต่ำ). ในเวลาเดียวกันกำลังจะเปลี่ยนตามสัดส่วนความถี่ของกระแสตั้งแต่ ป 2 =เอ็ม วีอาร์ ตัวอย่างเช่น เมื่อความถี่ปัจจุบันลดลง 2 เท่า กำลังมอเตอร์บนเพลาก็ลดลงครึ่งหนึ่งด้วย
คุณสมบัติเดียวกันที่ทำให้มอเตอร์นี้เป็นที่ต้องการมากกว่ามอเตอร์ประเภทอื่นๆ ทำให้เครื่องกำเนิดไฟฟ้าเหนี่ยวนำเป็นที่ต้องการมากกว่าเครื่องกำเนิดไฟฟ้าประเภทอื่นๆ กล่าวคือ ความแข็งแกร่งโดยธรรมชาติของการออกแบบโครงกระรอกและความเรียบง่ายของระบบควบคุม
มอเตอร์เหนี่ยวนำจะกลายเป็นเครื่องกำเนิดไฟฟ้าเมื่อเชื่อมต่อกับแหล่งจ่ายไฟหลักแล้วขับเหนือความเร็วซิงโครนัสโดยผู้เสนอญัตติสำคัญบางตัว เครื่องยนต์แรกอาจเป็นเทอร์ไบน์ เครื่องยนต์ กังหันลม หรืออะไรก็ได้ที่สามารถให้แรงบิดและความเร็วที่จำเป็นในการขับเคลื่อนเครื่องยนต์ให้อยู่ในสถานะโอเวอร์สปีด
ระเบียบโดยการเปลี่ยนจำนวนเสาคู่ การเปลี่ยนแปลงความเร็วเชิงมุมของมอเตอร์เหนี่ยวนำแบบเป็นขั้นเป็นตอนในช่วงกว้างนั้นเป็นไปได้ด้วยต้นทุนที่ทำให้ซับซ้อนและเพิ่มต้นทุนของการออกแบบมอเตอร์เหนี่ยวนำ นี่คือการควบคุมโดยการเปลี่ยนจำนวนคู่ของขั้วของมอเตอร์
ที่ความถี่เครือข่ายคงที่ ความเร็วเชิงมุมของสนามหมุนจะขึ้นอยู่กับจำนวนขั้วคู่ของสนามนี้เท่านั้น ซึ่งกำหนดโดยขดลวดสเตเตอร์ หากวางขดลวดสองอันแยกกันบนสเตเตอร์ - หนึ่งอันขึ้นรูป Rไอน้ำและอื่น ๆ ก่อตัวขึ้น อาร์"เสาคู่ เมื่อรวมขดลวดที่หนึ่งหรือสองในเครือข่าย เราจะได้ความถี่การหมุนของสนาม:
ประสิทธิภาพในฐานะเครื่องกำเนิดไฟฟ้าจะแตกต่างจากที่ใช้เป็นเครื่องยนต์เล็กน้อย ความแตกต่างอาจมีน้อยมากจนไม่สามารถตรวจพบได้ด้วยวิธีการวัดภาคสนามทั่วไป ข้อได้เปรียบหลักของเครื่องกำเนิดเหนี่ยวนำคือการควบคุมความถี่ ต้องควบคุมความเร็ว เครื่องกำเนิดไฟฟ้าแบบซิงโครนัสเพื่อให้ความถี่ไม่เบี่ยงเบนไปจากความถี่เชิงเส้น ความถี่เอาต์พุตและโวลต์ถูกควบคุมโดยระบบไฟฟ้าในเครื่องกำเนิดไฟฟ้าแบบเหนี่ยวนำและไม่ขึ้นกับการเปลี่ยนแปลงความเร็ว
N 1 \u003d 60f / p หรือ น" 1 = 60f/p",เพราะเหตุนี้,
n1/p" 1 =p"/p,
ความเร็วของโรเตอร์ของเครื่องยนต์ก็จะแตกต่างกันไปตามไปด้วย ในกรณีนี้ การหมุนของโรเตอร์มอเตอร์ต้องทำเหมือนล้อกระรอก
จำนวนขั้วของขดลวดสเตเตอร์ในกรณีนี้ไม่เกี่ยวข้องกันและสามารถเลือกได้ขึ้นอยู่กับสภาพการทำงานของเครื่องยนต์ กฎระเบียบนั้นลดลงจนถึงการเปลี่ยนแปลงอย่างกะทันหันในความถี่ของการหมุนของสนามมอเตอร์ แต่ความเร็วของโรเตอร์ไม่สามารถเปลี่ยนแปลงอย่างกะทันหันเนื่องจากความเฉื่อยของระบบขับเคลื่อนไฟฟ้าทั้งหมด หลังจากเปลี่ยนแล้วการเปลี่ยนแปลงที่สอดคล้องกันในความเร็วของโรเตอร์จะเริ่มขึ้น
เอฟเฟกต์การควบคุมตนเองช่วยลดความซับซ้อนของระบบควบคุม ตัวควบคุมเครื่องกำเนิดไฟฟ้าแบบเหนี่ยวนำมีความคล้ายคลึงกับตัวควบคุมที่ใช้สำหรับมอเตอร์เหนี่ยวนำ โดยมีข้อยกเว้นบางประการ ในกรณีที่สูญเสียโหลดไฟฟ้า แรงบิดของผู้เสนอญัตติสำคัญจะทำให้ระบบเร่งความเร็วอย่างรวดเร็วจนถึงความเร็วที่อาจเป็นอันตราย ต้องใช้เบรก กัฟเวอร์เนอร์ หรือคันเร่งเพื่อป้องกันความเร็วที่เป็นอันตราย สวิตช์ไฟฟ้าต้องติดตั้งเพื่อจำกัดกระแส ไฟฟ้าลัดวงจร. ในกรณีที่เกิดไฟฟ้าลัดวงจรในระบบไฟฟ้า เครื่องกำเนิดไฟฟ้าจะจ่ายกระแสไฟฟ้าขัดข้อง โดยปกติฟิวส์จำกัดกระแส ต้องจำกัดแรงบิดของผู้เสนอญัตติสำคัญเพื่อป้องกันไม่ให้เครื่องกำเนิดไฟฟ้าทำงานหนักเกินไป การควบคุมนี้อาจเกี่ยวข้องกับการออกแบบของผู้เสนอญัตติสำคัญหรืออาจขึ้นอยู่กับสัญญาณป้อนกลับจากเอาต์พุตของเครื่องกำเนิดไฟฟ้า ในกรณีร้ายแรง ผู้เสนอญัตติสำคัญสามารถดันแรงบิดของเครื่องกำเนิดไฟฟ้า ทำให้เกิดความเร็วหนี ในบางกรณี ความเร็วของผู้เสนอญัตติสำคัญอาจลดลงต่ำกว่าความเร็วซิงโครนัสของเครื่องกำเนิดไฟฟ้า หากเกิดเหตุการณ์นี้ขึ้น เครื่องกำเนิดไฟฟ้าจะถูกขับเคลื่อนให้ใช้งานระบบ หากไม่ต้องการการตอบสนองดังกล่าว สามารถตัดกำลังด้วยรีเลย์ย้อนกลับกำลัง หรือสามารถใช้คลัตช์โอเวอร์โหลดเพื่อให้มอเตอร์ทำงานโดยไม่มีโหลด ระบบจะต้องติดตั้งตัวจำกัดความเร็ว . เครื่องกำเนิดไฟฟ้าเหนี่ยวนำอาจใช้เป็นมอเตอร์เพื่อเร่งความเร็วของระบบให้ทำงาน หรืออาจใช้ตัวเสนอญัตติเฉพาะเพื่อให้การเร่งความเร็ว
เพื่อแสดงกระบวนการชั่วคราวนี้ให้ชัดเจนยิ่งขึ้น เราจึงสร้างลักษณะทางกลสองแบบ เครื่องอะซิงโครนัสด้วยจำนวนตัวแปรของขั้วคู่: หนึ่งลักษณะที่สอดคล้องกับ Rเสาคู่และเสาที่สอง พี" = 1pเสาคู่ (ตามลำดับ รูปที่ 14.31, เอและ ข)ให้เราสมมติว่าโมเมนต์บนเพลามอเตอร์ยังคงที่เมื่อความเร็วของสนามเปลี่ยนแปลง ด้วยการเพิ่มขึ้นในระยะหลัง กล่าวคือ ด้วยการเปลี่ยนจาก อาร์"ถึง Rขั้วคู่ ขั้นแรกมอเตอร์จะพบว่าตัวเองอยู่ในสภาวะที่ใกล้จะสตาร์ท และเกิดกระแสไฟกระชากขึ้น
ในกรณีหลังนี้ ไม่จำเป็นต้องคำนึงถึงช่วงเวลาของการเริ่มต้นและกระแสในการออกแบบเครื่อง ซึ่งช่วยให้ผู้ออกแบบได้รับประสิทธิภาพสูงสุดเมื่อโหลดเต็มที่ เครื่องกำเนิดไฟฟ้าเหนี่ยวนำมีการใช้มากขึ้นในการกู้คืนพลังงานที่อาจสูญเสียไป พลังงานที่สร้างขึ้นสามารถใช้ในไซต์งานหรือขายให้กับระบบสาธารณูปโภคที่จัดหาไซต์ เพื่อแปลงพลังงานนี้เป็น พลังงานไฟฟ้าใช้เครื่องกำเนิดลมและน้ำ
การใช้งานทั่วไปของเครื่องกำเนิดไฟฟ้าเหนี่ยวนำ ในกรณีที่ไอน้ำขัดข้อง สามารถใช้เครื่องกำเนิดไฟฟ้าเป็นมอเตอร์เพื่อขับเคลื่อนปั๊มได้ นอกจากนี้ ปั๊มจะป้องกันไม่ให้ระบบทำงานเกินความเร็วในกรณีที่ไฟฟ้าดับ บริษัทน้ำเชื่อว่าสามารถซื้อไฟฟ้าได้ในราคาต่ำในตอนกลางคืนและขายไฟฟ้าได้ในอัตราที่สูงในช่วงที่มีผู้ใช้ไฟฟ้าสูงสุดในตอนกลางวัน เขาสร้างถังเก็บที่ต่ำและสูง และติดตั้งปั๊มหลายตัว ตอนกลางคืนเขาสูบน้ำจากสระเตี้ยลงสระสูง ซื้อไฟฟ้าจากสาธารณูปโภค ในช่วงเวลาสูงสุด น้ำจะไหลย้อนกลับผ่านปั๊ม ขับเครื่องยนต์ให้เป็นเครื่องกำเนิดไฟฟ้า ขายไฟฟ้าให้กับสาธารณูปโภค วงจรนี้ง่ายมากที่สามารถควบคุมได้จากระยะไกล ลมพัดตลอดเวลาระหว่างทะเลทรายและภูเขาของแคลิฟอร์เนีย ชายผู้กล้าได้กล้าเสียสร้างหอคอยหลายแห่งด้วยกังหันลมที่ควบคุมเครื่องกำเนิดไฟฟ้าเหนี่ยวนำผ่านกระปุกเกียร์ พลังงานถูกสร้างขึ้นตามสัดส่วนของความเร็วลมและขายให้กับสาธารณูปโภคในท้องถิ่น ควรหลีกเลี่ยงการใช้มอเตอร์เหนี่ยวนำเป็นเครื่องกำเนิดไฟฟ้าตามอำเภอใจ เป็นไปได้ว่ามอเตอร์บางตัวจะไม่ทำงานได้ดีเหมือนเครื่องกำเนิดไฟฟ้าเนื่องจากความอิ่มตัวของแม่เหล็กภายใน ความเครียดภายในเนื่องจากเครื่องกำเนิดไฟฟ้าอาจสูงกว่ามอเตอร์ที่มีแรงดันขั้วเท่ากัน ความหนาแน่นของสนามแม่เหล็กในเครื่องจักรถูกกำหนดโดยแรงดันไฟฟ้าในช่องว่างอากาศที่เท่ากัน มันจบแล้ว ไฟฟ้าแรงสูงในช่องว่างอากาศสามารถนำไปสู่ความอิ่มตัวที่มากเกินไปของเครื่องรวมทั้งการสูญเสียแกนสูงและกระแสแม่เหล็กที่เพิ่มขึ้น สันนิษฐานได้ว่าเครื่องอาจมีความร้อนสูงเกินไปที่โหลดต่ำมาก หากใช้มอเตอร์เหนี่ยวนำเป็นเครื่องกำเนิดไฟฟ้า นักออกแบบจะต้องทราบข้อมูลนี้เพื่อที่เขาจะได้กำหนดค่าเผื่อความหนาแน่นของสนามแม่เหล็กอย่างเหมาะสม มอเตอร์เหนี่ยวนำโดยทั่วไปจะอยู่ที่ 460 โวลต์สำหรับใช้กับระบบ 480 โวลต์ เครื่องกำเนิดไฟฟ้าแบบเหนี่ยวนำจะต้องได้รับการจัดอันดับสำหรับพิกัดแรงดันไฟฟ้าของระบบหรือสูงกว่าเล็กน้อย ไม่ต่ำกว่า เนื่องจากขณะนี้เครื่องกำเนิดไฟฟ้าเป็นแหล่งพลังงานและไม่ใช่โหลดในระบบไฟฟ้า ตัวเก็บประจุแก้ไขตัวประกอบกำลังสามารถใช้เพื่อแก้ไขตัวประกอบกำลังของเครื่องกำเนิดไฟฟ้าได้ในลักษณะเดียวกับมอเตอร์เหนี่ยวนำ อย่างไรก็ตาม หากมีความเป็นไปได้ที่เครื่องกำเนิดไฟฟ้าอาจทำความเร็วเกินกำหนด ไม่ว่าจะเชื่อมต่อกับระบบไฟฟ้าหรือไม่ก็ตาม ตัวเก็บประจุจะต้องเชื่อมต่อกับระบบผ่านเบรกเกอร์แยกต่างหาก เพื่อที่ว่าเมื่อเปิดเบรกเกอร์เครื่องกำเนิดไฟฟ้า ตัวเก็บประจุจะไม่ทำงาน เชื่อมต่อกับเครื่องกำเนิดไฟฟ้า ภายใต้สภาวะที่โอเวอร์สปีด ตัวเก็บประจุสามารถโอเวอร์โหลดเครื่องกำเนิดไฟฟ้าและทำให้ไฟฟ้าแรงสูงไม่สามารถควบคุมได้ แรงดันไฟฟ้าเหล่านี้สามารถทำลายระบบฉนวนของเครื่องกำเนิดไฟฟ้า และยังอาจเป็นอันตรายต่ออุปกรณ์และบุคลากรอื่นๆ โรงกระดาษมีสต็อกเชื้อเพลิงจำนวนมากในเปลือกไม้และเศษเหล็ก . เครื่องกำเนิดไฟฟ้าเหนี่ยวนำได้รับการออกแบบสำหรับการใช้งานเฉพาะและไม่ได้สำหรับการใช้งานทั่วไป
แต่เมื่อย้ายจาก Rถึง อาร์"นั่นคือเมื่อความถี่การหมุนของสนามลดลงเครื่องจะพบว่าตัวเองอยู่ในสภาวะของโหมดเครื่องกำเนิดไฟฟ้าและทำงานเป็นอันดับแรกโดยให้พลังงานแก่เครือข่าย
บางครั้งโหมดนี้ใช้เพื่อเบรกไดรฟ์อย่างรวดเร็วและประหยัด
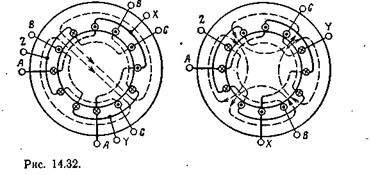
ขดลวดสองอันแยกจากกันจะจ่ายให้กับสเตเตอร์สำหรับมอเตอร์ที่ใช้พลังงานต่ำเท่านั้น สำหรับมอเตอร์กำลังสูง ควรเปลี่ยนคอยล์ของขดลวดเดียวกันเพื่อให้ได้จำนวนขั้วคู่ที่ต่างกัน ในรูป 14.32 แสดงวงจรสวิตชิ่ง ขดลวดสามเฟสจากสองถึงสี่เสา การสลับขดลวดในอัตราส่วนอื่นที่ไม่ใช่ 1:2 จำเป็นต้องมีการเปลี่ยนแปลงวงจรที่ซับซ้อนมากขึ้นและเป็นเรื่องปกติน้อยกว่า
โปรดติดต่อตัวแทนจำหน่ายในพื้นที่ของคุณหรือตัวแทนฝ่ายขายเพื่อส่งคำขอทางเทคนิค เฉพาะผู้ที่ทราบความแตกต่างเท่านั้นที่สามารถเลือกวิธีการควบคุมที่เหมาะสมเมื่อออกแบบไดรฟ์ได้ และทำให้ต้นทุนต่ำที่สุด
เมื่อออกแบบระบบขับเคลื่อนด้วยไฟฟ้า สิ่งสำคัญคือต้องกำหนดข้อกำหนดด้านความแม่นยำสำหรับการควบคุมแอปพลิเคชัน หากข้อกำหนดมีความโปร่งใสและระบุไว้ ระบบขับเคลื่อนสามารถคอมไพล์และปรับแต่งด้วยส่วนประกอบที่จำเป็นได้ เป้าหมายหลักคือการเลือกส่วนประกอบที่เหมาะสมกับข้อกำหนดด้านคุณภาพการควบคุมเฉพาะด้วยวิธีที่เหมาะสมกับต้นทุน ซึ่งเป็นวิธีเดียวที่จะหลีกเลี่ยงค่าโสหุ้ยที่ไม่จำเป็นได้ ตัวอย่างเช่น ความต้องการได้รับการจัดอันดับสูงหรือต่ำเกินไป
ในกรณีส่วนใหญ่ สเตเตอร์ของเครื่องอะซิงโครนัสจะมาพร้อมกับขดลวดอิสระสองอัน ซึ่งแต่ละอันจะถูกสลับในอัตราส่วน 1: 2 หรืออย่างอื่น ดังนั้นเครื่องยนต์จึงมีสี่ระดับความเร็ว เช่น 3000, > 1500, 1,000 และ 500 รอบต่อนาที
ระเบียบไม่คงที่. ในมอเตอร์แบบอะซิงโครนัสสามเฟสที่มีเฟสโรเตอร์ จะใช้วิธีการควบคุมความเร็วของโรเตอร์แบบรีโอสแตติก สิ่งนี้ทำได้โดยการแนะนำรีโอสแตตสามเฟสที่ปรับได้เข้ากับวงจรของขดลวดเฟสของโรเตอร์ เหมือนกับตอนสตาร์ทเครื่องยนต์ (รูปที่ 14.24) แต่รีโอสแตตนี้ต้องได้รับการออกแบบสำหรับการโหลดระยะยาวโดยกระแสของโรเตอร์ ไม่ใช่สำหรับการโหลดระยะสั้น เช่น รีโอสแตตสตาร์ท การเพิ่มขึ้นของความต้านทานเชิงแอคทีฟของวงจรโรเตอร์จะเปลี่ยนลักษณะเฉพาะ เอ็ม(s) - ทำให้นุ่มขึ้น (ดูรูปที่ 14.25) หากที่แรงบิดคงที่บนเพลามอเตอร์ความต้านทานเชิงแอคทีฟของวงจรโรเตอร์จะเพิ่มขึ้นโดยค่อยๆ เพิ่มความต้านทานของลิโน่ (r p1< rp2< r р3), то рабочая точка будет смещаться с одной кривой นางสาว)ถัดไปซึ่งสอดคล้องกับความต้านทานที่เพิ่มขึ้นของวงจรโรเตอร์ (รูปที่ 14.25 คะแนน 1-4), ตามที่สลิปจะเพิ่มขึ้นและด้วยเหตุนี้ความเร็วของเครื่องยนต์จะลดลง
ด้วยวิธีนี้ คุณสามารถเปลี่ยนความเร็วของโรเตอร์ในช่วงจากค่าปกติไปเป็นการหยุดเต็มที่ได้ แต่ด้วยวิธีการควบคุมนี้ การสูญเสียพลังงานที่ค่อนข้างมากย่อมหลีกเลี่ยงไม่ได้ (ดู § 14.11) กำลังหมุนสนาม R vr, pโดยไม่คำนึงถึงการสูญเสียพลังงานในแกนสเตเตอร์ประกอบด้วย (ดูรูปที่ 14.20) ของการสูญเสียพลังงานในตัวนำของขดลวดโรเตอร์ (ดูวงจรเทียบเท่าในรูปที่ 14.19)
R pr2 \u003d r "in2 (I" 2) 2
และ พลังงานกล
P fur \u003d r "ใน 2 (I" 2) 2
ทัศนคติ
R pr 2 / R mech \u003d s / (l -s) \u003d (n 1 - น)/น
แสดงให้เห็นว่าการแบ่งกำลังกลลดลงในสัดส่วนโดยตรงกับการลดความเร็วของโรเตอร์ ในขณะเดียวกัน สัดส่วนของการสูญเสียพลังงานในความต้านทานเชิงแอคทีฟของวงจรโรเตอร์จะเพิ่มขึ้นตามลำดับ ดังนั้น เพื่อลดความเร็วของเครื่องยนต์ ตัวอย่างเช่น 25% จำเป็นต้องรวมลิโน่ในวงจรโรเตอร์ด้วยความต้านทานแบบแอคทีฟ ซึ่งหนึ่งในสี่ของพลังงานของสนามแม่เหล็กหมุนจะถูกแปลงเป็นความร้อนอย่างไร้ประโยชน์ ข้อเสียของระเบียบดังกล่าวอาจเป็นความจริงที่ว่าการรวมตัวปรับอุณหภูมิในวงจรโรเตอร์ทำให้ ลักษณะทางกลเครื่องยนต์มีความนุ่มนวลจึงลดความเสถียรของความเร็วลง เมื่อรีโอสแตทเปิดอยู่ การเปลี่ยนแปลงเล็กๆ น้อยๆ ของโหลดบนเพลาจะทำให้เกิดการเปลี่ยนแปลงที่สำคัญในความเร็วของเครื่องยนต์
มีตำแหน่งในการติดตั้งระบบไฟฟ้าเมื่อคุณไม่สามารถทำได้โดยไม่ต้องใช้มอเตอร์กระแสตรง เป็นมอเตอร์ไฟฟ้าที่สามารถปรับได้ตามความเร็วรอบการหมุนของโรเตอร์ซึ่งจำเป็นในการติดตั้งระบบไฟฟ้า จริงอยู่มีข้อบกพร่องมากมายและหนึ่งในนั้นคือการสึกหรออย่างรวดเร็วของแปรงหากติดตั้งด้วยความโค้งและอายุการใช้งานค่อนข้างต่ำ เมื่อสึกหรอจะเกิดประกายไฟ ดังนั้นเครื่องยนต์ดังกล่าวจึงไม่สามารถใช้ได้ในห้องที่ระเบิดและมีฝุ่นมาก แถมมอเตอร์ไฟฟ้า กระแสตรงมันมีราคาแพง ในการเปลี่ยนแปลงสถานการณ์นี้ ให้ใช้มอเตอร์แบบอะซิงโครนัสและตัวควบคุมความถี่สำหรับมอเตอร์แบบอะซิงโครนัส
ในเกือบทุกประการ มอเตอร์ไฟฟ้าที่ทำงานด้วยกระแสสลับนั้นเหนือกว่าแอนะล็อกที่ใช้กระแสตรง ประการแรกพวกเขามีความน่าเชื่อถือมากขึ้น ประการที่สอง มีขนาดและน้ำหนักที่เล็กกว่า ประการที่สามราคาต่ำกว่า ประการที่สี่ ใช้งานและเชื่อมต่อได้ง่ายขึ้น
แต่มีข้อเสียเปรียบอยู่อย่างหนึ่ง นั่นคือความซับซ้อนของการควบคุมความเร็ว ในกรณีนี้ วิธีมาตรฐานในการควบคุมความถี่ของมอเตอร์แบบอะซิงโครนัสจะไม่ทำงาน กล่าวคือ การเปลี่ยนแรงดันไฟฟ้า การตั้งค่าความต้านทาน และอื่นๆ การควบคุมความถี่ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสเป็นปัญหาอันดับหนึ่ง แม้ว่าพื้นฐานทางทฤษฎีจะเป็นที่รู้จักตั้งแต่ช่วงทศวรรษที่ 30 ของศตวรรษที่ผ่านมา ทั้งหมดนี้ทำให้ต้นทุนลดลง ตัวแปลงความถี่. ทุกอย่างเปลี่ยนไปเมื่อมีการประดิษฐ์ไมโครวงจรด้วยความช่วยเหลือของทรานซิสเตอร์จึงเป็นไปได้ที่จะประกอบเครื่องแปลงความถี่ด้วยต้นทุนขั้นต่ำ
หลักการกำกับดูแล
ดังนั้น วิธีการควบคุมความเร็วของมอเตอร์เหนี่ยวนำจึงใช้สูตรเดียว ที่นี่เธออยู่ด้านล่าง
ω=2πf/p โดยที่
- ω คือความเร็วเชิงมุมของการหมุนของสเตเตอร์
- f คือความถี่ของแรงดันไฟฟ้าขาเข้า
- p คือจำนวนคู่ขั้ว
นั่นคือปรากฎว่าสามารถเปลี่ยนความเร็วการหมุนของมอเตอร์ไฟฟ้าได้โดยการเปลี่ยนความถี่แรงดันไฟฟ้าเท่านั้น มันให้อะไรในทางปฏิบัติ? อย่างแรกคือการทำงานที่ราบรื่นของมอเตอร์ โดยเฉพาะอย่างยิ่งเมื่อสตาร์ทอุปกรณ์ เมื่อเครื่องยนต์ทำงานภายใต้ภาระสูงสุด ที่สองคือเพิ่มขึ้นสลิป ด้วยเหตุนี้ประสิทธิภาพจึงเพิ่มขึ้นและการสูญเสียลักษณะพลังงานลดลง
โครงสร้างของตัวควบคุมความถี่
ตัวแปลงความถี่ที่ทันสมัยทั้งหมดสร้างขึ้นบนหลักการของการแปลงสองครั้งที่เรียกว่า นั่นคือ, กระแสสลับจะถูกแปลงเป็น DC ผ่านวงจรเรียงกระแสและตัวกรองที่ไม่มีการควบคุม นอกจากนี้ผ่านพัลส์อินเวอร์เตอร์ (เป็นสามเฟส) การแปลงย้อนกลับของกระแสตรงเป็นกระแสสลับจะเกิดขึ้น อินเวอร์เตอร์ประกอบด้วยสวิตช์ไฟ 6 ตัว (ทรานซิสเตอร์) ดังนั้นการหมุนของเครื่องยนต์ไฟฟ้าแต่ละครั้งจึงเชื่อมต่อกับปุ่มปรับกระแสไฟ (บวกหรือลบ) เป็นอินเวอร์เตอร์ที่เปลี่ยนความถี่ของแรงดันไฟฟ้าที่ใช้กับขดลวดสเตเตอร์ อันที่จริงแล้วการควบคุมความถี่ของมอเตอร์ไฟฟ้าเกิดขึ้นโดยผ่านมัน

ในอุปกรณ์นี้ มีการติดตั้งทรานซิสเตอร์กำลังที่เอาต์พุต พวกเขาทำหน้าที่เป็นกุญแจ หากเราเปรียบเทียบกับไทริสเตอร์ก็ควรสังเกตว่าอดีตสร้างสัญญาณในรูปแบบของไซนัส เป็นรูปแบบที่สร้างความผิดเพี้ยนน้อยที่สุด
ตอนนี้หลักการทำงานของเครื่องแปลงความถี่ เพื่อให้เข้าใจถึงสิ่งนี้ เราขอเสนอให้ถอดแยกชิ้นส่วนจากรูปด้านล่าง
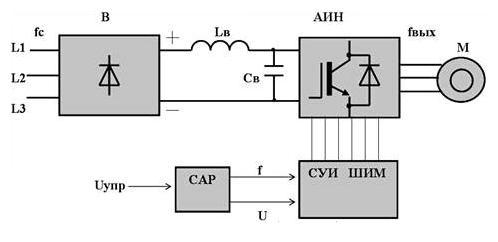
มาดูภาพกันเลยดีกว่าว่าที่ไหน
- "B" เป็นเครื่องแปลงกระแสไฟฟ้าชนิดไดโอดที่ไม่สามารถควบคุมได้
- "AIN" เป็นอินเวอร์เตอร์อัตโนมัติ
- "SUI PWM" - ระบบควบคุมความกว้างพัลส์
- "SAR" - ระบบควบคุมอัตโนมัติ
- "Sv" - ตัวเก็บประจุกรอง
- "Lv" - คันเร่ง
แผนภาพแสดงให้เห็นชัดเจนว่าอินเวอร์เตอร์ควบคุมความถี่แรงดันไฟฟ้าเนื่องจากระบบควบคุมความกว้างพัลส์ (เป็นความถี่สูง) เป็นส่วนควบคุมนี้ที่รับผิดชอบในการเชื่อมต่อขดลวดสเตเตอร์ของมอเตอร์ไฟฟ้าสลับกับขั้วบวกของวงจรเรียงกระแสจากนั้นไปที่ขั้วลบ ความถี่ของการเชื่อมต่อกับขั้วเกิดขึ้นตามแนวโค้งไซน์ ในกรณีนี้ ความถี่พัลส์ถูกกำหนดโดยความถี่ PWM อย่างแม่นยำ นี่คือการทำงานของการควบคุมความถี่





