Useissa maissa asynkroniset koneet Mukana on myös keräilykoneet. Toinen nimi asynkronisille koneille on induktio johtuen siitä, että staattorin pyörivä kenttä aiheuttaa roottorin käämin virran. Asynkroniset koneet muodostavat nykyään suurimman osan sähkökoneet. Niitä käytetään pääasiassa sähkömoottoreina ja ne ovat päämuuntimia. sähköenergiaa mekaaniseksi.
Edut:
- Valmistuksen helppous.
- Ei mekaanista kosketusta koneen staattiseen osaan.
Virheet:
- Pieni Käynnistysmomentti.
- Merkittävä käynnistysvirta.
Tarina
Etusija oikosulkumoottorin luomisessa kuuluu Nikola Teslalle, joka Budapestissa keväällä 1882 ratkaisi pyörivän moottorin luomisen ongelman. magneettikenttä kiinteällä monivaihekäämityksellä vaihtovirta, ja vuonna 1884 Strasbourgissa hän esitteli moottorinsa toimivaa mallia. Asynkronisten moottoreiden kehittämiseen osallistui Galileo Ferraris, joka vuonna 1885 rakensi Italiassa mallin 3 W:n oikosulkumoottorista. Vuonna 1888 Ferraris julkaisi tutkimuksensa artikkelissa Torinon kuninkaalliseen tiedeakatemiaan (samana vuonna Tesla sai US-patentin 381 968, päivätty 5.1.1888 ( MEILLE. Patentti 0 381 968 | keksintöhakemus nro 252132, päivätty 10.12.1887), jossa esitettiin teoreettinen perusta asynkroninen moottori. Ferrarin ansio on se, että he ovat tehneet virheellisen johtopäätöksen pienestä tehokkuudesta. asynkronisen moottorin ja vaihtovirtajärjestelmien käytön epätarkoituksenmukaisuuden vuoksi hän kiinnitti monien insinöörien huomion asynkronisten koneiden parantamisongelmaan. Atti di Turino -lehdessä julkaistu Galileo Ferrarisin artikkeli painettiin uudelleen englanninkielisessä aikakauslehdessä, ja sen luki heinäkuussa 1888 Mihail Osipovich Dolivo-Dobrovolsky, Darmstadtin korkeammasta teknisestä koulusta valmistunut, Venäjältä kotoisin. Jo vuonna 1889 Dolivo-Dobrovolsky sai patentin kolmivaiheiselle asynkroniselle moottorille, jossa on oravahäkkiroottori, ja vuonna 1890 - patentit Englannissa nro 20425 ja Saksassa nro 75361 kolmivaiheiselle asynkroniselle moottorille, jossa on vaiheroottori. . Nämä keksinnöt avasivat sähkökoneiden massateollisuuden sovellusten aikakauden. Tällä hetkellä asynkroninen moottori on yleisin sähkömoottori.
Design
Asynkronisessa koneessa on staattori ja roottori, jotka on erotettu toisistaan ilmaraolla. Sen aktiiviset osat ovat käämit ja magneettipiiri (ydin); kaikki muut osat ovat rakenteellisia ja tarjoavat tarvittavan lujuuden, jäykkyyden, jäähdytyksen, pyörimismahdollisuuden jne.
Staattorin käämitys on kolmivaiheinen (in yleinen tapaus- monivaiheinen) käämitys, jonka johtimet on jaettu tasaisesti staattorin kehälle ja on asetettu vaiheittain uriin, joiden kulmaetäisyys on 120 el.deg. Staattorikäämin vaiheet on yhdistetty vakiojärjestelmät"kolmio" tai "tähti" ja muodosta yhteys verkkoon kolmivaiheinen virta. Staattorin magneettipiiri uudelleenmagnetoidaan staattorikäämin virran muuttamisen yhteydessä, joten se rekrytoidaan sähköteräslevyistä minimaalisten magneettihäviöiden varmistamiseksi. Päämenetelmä magneettipiirin kokoamiseksi pakkaukseksi on sekoittaminen.
Roottorin suunnittelun mukaan asynkroniset koneet jaetaan kahteen päätyyppiin: kanssa oikosuljettu roottori ja vaihe roottori. Molemmilla tyypeillä on sama staattorirakenne ja ne eroavat vain roottorin käämityksen rakenteesta. Roottorin magneettipiiri on valmistettu samalla tavalla kuin staattorin magneettipiiri - sähköteräslevyistä.
oravahäkkiroottori
Asynkronisen oravahäkkikoneen roottori
Oikosuljettu roottorin käämitys, jota usein kutsutaan "oravan häkkiksi" rakenteen ulkoisen samankaltaisuuden vuoksi, koostuu kupari- tai alumiinitangoista, jotka on oikosuljettu päissä kahdella renkaalla. Tämän käämin sauvat työnnetään roottorin sydämen uriin. Roottorin ja staattorin ytimissä on hammaspyörärakenne. Pieni- ja keskitehoisissa koneissa käämitys tehdään yleensä kaatamalla sulaa alumiiniseosta roottorin sydämen uriin. Yhdessä "oravahäkin" sauvojen kanssa on valettu oikosulkurenkaat ja päätyterät, jotka tuulettavat konetta. Suuritehoisissa koneissa "oravahäkki" on valmistettu kuparitankoista, joiden päät on liitetty oikosulkurenkaisiin hitsaamalla.
Usein roottorin tai staattorin urat tehdään viistoiksi vähentämään hampaiden läsnäolosta johtuvien magneettivuon aaltoilusta aiheutuvaa korkeampaa harmonista EMF:ää, jonka magneettiresistanssi on huomattavasti pienempi kuin käämin magneettivastus, sekä vähentämään. aiheuttamaa melua magneettisista syistä. Aloitussuorituskyvyn parantamiseksi asynkroninen moottori oravahäkkiroottorilla, nimittäin käynnistysmomentin kasvulla ja käynnistysvirran laskulla, roottorissa käytetään erityistä uramuotoa. Tässä tapauksessa roottorin uran ulomman osan pyörimisakselilta on pienempi poikkileikkaus kuin sisäosalla. Tämän avulla voit käyttää virran siirtymän vaikutusta, jonka vuoksi roottorin käämin aktiivinen vastus kasvaa suurilla luistoilla (käynnistettäessä).
Asynkronisilla moottoreilla, joissa on oravahäkkiroottori, on pieni käynnistysmomentti ja merkittävä käynnistysvirta, mikä on "oravahäkin" merkittävä haittapuoli. Siksi niitä käytetään niissä sähkökäytöissä, joissa ei vaadita suuria käynnistysmomentteja. Eduista on huomattava valmistuksen helppous ja sähköisen kosketuksen puuttuminen koneen staattisen osan kanssa, mikä takaa kestävyyden ja vähentää ylläpitokustannuksia. Roottorin erityisrakenteella, kun vain ontto alumiinisylinteri pyörii ilmavälissä, on mahdollista saavuttaa moottorin alhainen inertia.
vaiheroottori
Vaiheroottorissa on kolmivaiheinen (yleensä monivaiheinen) käämitys, joka on yleensä kytketty "tähti"-kaavion mukaan ja tuotu ulos liukurenkaisiin, jotka pyörivät koneen akselin kanssa. Näitä renkaita pitkin liukuvien grafiitti- tai metalli-grafiittiharjojen avulla roottorin käämityspiiriin:
- sisältää painolastin reostatoinnin lisäaktiivisena vastuksena, sama jokaisessa vaiheessa. Pienentämällä käynnistysvirtaa käynnistysmomentti kasvaa maksimiarvoon (ensimmäisellä hetkellä). Tällaisia moottoreita käytetään ohjaamaan mekanismeja, jotka otetaan käyttöön, kun raskas kuorma tai vaativat tasaisen nopeuden säätelyn.
- sisältävät induktanssit (kuristimet) jokaisessa roottorin vaiheessa. Kuristimien resistanssi riippuu virtaavan virran taajuudesta, ja kuten tiedät, roottorissa ensimmäisellä käynnistyshetkellä liukuvirtojen taajuus on suurin. Roottorin pyöriessä ylöspäin indusoituneiden virtojen taajuus pienenee ja sen mukana induktorin resistanssi pienenee. Induktiivinen reaktanssi vaiheroottoripiirissä voit automatisoida moottorin käynnistysmenettelyn ja tarvittaessa "kiinni" moottorin, jonka nopeus on laskenut ylikuormituksen vuoksi. Induktanssi pitää roottorin virrat vakiona.
- mukaan lähde tasavirta, jolloin saadaan synkroninen kone.
- sisältää tehon invertteristä, jonka avulla voit hallita moottorin nopeutta ja vääntömomenttiominaisuuksia. Tämä on erityinen toimintatapa (kaksoissyöttölaite). Verkkojännite on mahdollista kytkeä päälle ilman invertteriä staattorin virransyötön vastakkaisella vaiheella.
Schrage-Richter moottori
Kolmivaiheinen kommutaattorin asynkroninen moottori, joka syötetään roottorin puolelta.
Käänteinen (syötetään roottorista) asynkroninen moottori, jonka avulla voit säätää nopeutta tasaisesti minimistä (alue määräytyy lisäkäämin käämitystietojen perusteella, jota käytetään lisä-emf:n saamiseksi ja joka viedään liukutaajuudella toisiopiiriin kone) maksimiin, joka yleensä on nopeussynkronismin yläpuolella. Fyysisesti valmistettu muuttamalla kaksinkertaisen harjasarjan ratkaisua moottorin toisiopiirin jokaiselle "vaiheelle". Siten järjestämällä harjan liikeradat uudelleen mekaanisella laitteella (käsipyörällä tai muulla toimilaitteella) oli mahdollista säädellä AC-oikosulkumoottorin nopeutta erittäin taloudellisesti. Ohjauksen idea on yleisesti ottaen äärimmäisen yksinkertainen ja sitä tullaan toteuttamaan myöhemmin niin sanotuissa asynkronisissa venttiilikaskadeissa, joissa vaiheroottoripiiriin sisältyi tyristorimuunnin, joka toimi invertterina tai tasasuuntaajana. Idean ydin on, että oikosulkumoottorin toisiopiiriin viedään ylimääräinen emf. muuttuva amplitudi ja vaihe liukutaajuudella. Kerääjä suorittaa tehtävän sovittaa lisä-emf:n taajuus roottorin liukutaajuuteen. Jos ylimääräinen e.m.f. on vastapäätä päävirtaa, teho lähtee moottorin toisiopiiristä vastaavalla koneen nopeuden laskulla, nopeusrajoituksen määräävät vain käämien jäähdytysolosuhteet). Koneen synkronointipisteessä lisäemf:n taajuus. on yhtä suuri kuin nolla, eli kollektori syöttää tasavirran toisiopiiriin. Jos kyseessä on ylimääräisen e.m.f. päälaitteen kanssa lisäteho käännetään koneen toisiopiiriin ja vastaavasti kiihtyvyys synkronisen nopeuden yläpuolelle. Sääntelyn tuloksena syntyi siis melko jäykkien ominaisuuksien perhe, jonka ominaisuudet vähenivät kriittinen hetki hidastaessa ja kiihdytettäessä synkronisen nopeuden yläpuolelle - sen suhteellisella lisäyksellä.
Erityisen kiinnostavaa on koneen toiminta epäsymmetrisellä harjaliikenteellä. Tässä tapauksessa lisäemf:n vektorikaavio. moottori vastaanottaa ns. tangentiaalisen komponentin, mikä mahdollistaa työskentelyn kapasitiivisella vasteella verkkoon.
Rakenteellisesti moottori on käännetty kone, jossa roottoriin on asetettu kaksi käämiä: virransyöttö liukurenkaista ja käämitys, joka on kytketty kahdella harjaparilla "vaihetta" kohti staattorin toisiokäämiin. Itse asiassa nämä kaksi osaa toisiokäämi Harjan poikittaisasennosta riippuen se käynnistyy joko toistensa mukaan tai vastakkaisiin suuntiin. Sääntely toimii näin.
Tällaiset moottorit saivat suurimman kehityksen XX vuosisadan 30-luvulla. Neuvostoliitossa, jossa sähköteollisuuden tuotantokulttuuri on alhainen, AC-keräinkoneet (ACC) eivät saaneet havaittavaa jakelua ja kehitystä keruuharjakokoonpanon valmistuksen lisääntyneiden vaatimusten ja yleisten korkeiden kustannusten vuoksi. Ne tunkeutuivat Neuvostoliiton alueelle pääasiassa osana ulkomailta ostettuja laitteita ja korvattiin ensi kerralla vähemmän tehokkailla, mutta halvemmilla tasavirtakoneilla tai asynkronisilla moottoreilla, joissa on vaiheroottori. Nykyiset menetelmät c.m.f. Akateemikko M.P. Kostenkon kehittämiä (hänen oppikirjoissa asynkroniset koneet jaetaan keräilijöihin ja harjattomiin) pidetään riittävänä kriteerinä koneen suorituskyvylle tarkistamalla se kytkentäolosuhteiden mukaan (vertailun vuoksi lämpölaskenta on kriittinen tasavirtamoottorille) .
Tällä hetkellä Schrage-moottori kiinnostaa pelkästään erinomaisena visuaalisena apuvälineenä opiskelijoille. Lipetskin teknisen yliopiston sähkökäytön osaston opettajan L. Ya. Telichkon mukaan " paras malli, jossa kaskadin teoriaa ja käytäntöä voidaan koskettaa käsin, on mahdotonta löytää.
Toimintaperiaate
kiinnitetään staattorin käämiin AC jännite, jonka vaikutuksesta virta kulkee näiden käämien läpi ja muodostaa pyörivän magneettikentän. Magneettikenttä vaikuttaa roottorin käämiin ja indusoi niihin sähkömagneettisen induktion lain mukaan EMF:n. Roottorin käämissä syntyy indusoidun EMF:n vaikutuksesta virta. Roottorin käämin virta muodostaa oman magneettikentän, joka on vuorovaikutuksessa staattorin pyörivän magneettikentän kanssa. Tämän seurauksena roottorin magneettipiirin jokaiseen hampaan vaikuttaa voima, joka summautuen kehän ympärille muodostaa pyörivän sähkömagneettisen momentin, joka saa roottorin pyörimään.
Staattorikentän pyörimisnopeus
Kun staattorikäämitykseen syötetään kolmivaiheinen (yleensä monivaiheinen) virta, syntyy pyörivä magneettikenttä, jonka synkroninen pyörimistaajuus [rpm] on suhteessa verkkotaajuuteen [Hz]. suhde:
,missä on staattorikäämin magneettinapojen lukumäärä.
Napaparien lukumäärästä riippuen seuraavat staattorin magneettikentän pyörimistaajuuksien arvot ovat mahdollisia syöttöjännitteen taajuudella 50 Hz:
| n, rpm | |
|---|---|
| 3000 | 1 |
| 1500 | 2 |
| 1000 | 3 |
| 300 | 10 |
Useimmissa moottoreissa on 1-3 napaparia, harvoin 4. Lisää napoja käytetään hyvin harvoin, tällaisissa koneissa on alhainen hyötysuhde ja tehokerroin, mutta ne mahdollistavat moottorin roottorin pyörimisen erittäin tasaisesti ja hitaasti.
Toimintatilat
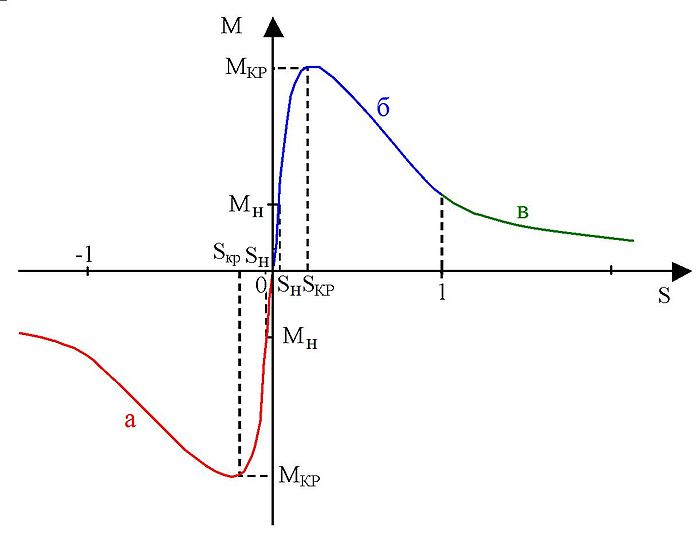
Asynkronisen koneen mekaaniset ominaisuudet: a - energian talteenottotila verkkoon (generaattoritila), b - moottoritila, c - vasta-inkluusiotila (sähkömagneettinen jarrutila).
Moottoritila
Jos roottori on paikallaan tai sen pyörimistaajuus on pienempi kuin synkroninen, pyörivä magneettikenttä ylittää roottorin käämin johtimet ja indusoi niihin EMF:n, jonka vaikutuksesta roottorin käämiin ilmestyy virta. Sähkömagneettiset voimat vaikuttavat johtimiin tämän käämin virralla (tai pikemminkin roottorin sydämen hampailla); niiden kokonaisvoima muodostaa sähkömagneettisen vääntömomentin, joka vetää roottoria magneettikentän mukana. Jos tämä momentti riittää voittamaan kitkavoimat, roottori alkaa pyöriä ja sen tasainen pyörimisnopeus [rpm] vastaa yhtälöä sähkömagneettinen vääntömomentti akseliin kohdistuvan kuormituksen aiheuttama jarru, laakereiden kitkavoimat, tuuletus jne. Roottorin nopeus ei voi saavuttaa magneettikentän nopeutta, koska tällöin magneettikentän pyörimisen kulmanopeus roottorin käämiin nähden tulee yhtä suureksi kuin nolla, magneettikenttä lakkaa indusoimasta roottorikäämin EMF:ää ja puolestaan luo vääntömomenttia; Siten asynkronisen koneen moottorin toimintatavassa epäyhtälö on totta:
.Magneettikentän ja roottorin pyörimistaajuuksien suhteellista eroa kutsutaan liukuvat:
.On selvää, että moottoritilassa.
generaattoritila
Jos roottoria kiihdytetään ulkoisen vääntömomentin avulla (esimerkiksi jollain moottorilla) taajuudelle, joka on suurempi kuin magneettikentän pyörimistaajuus, niin roottorin käämityksen EMF:n suunta ja aktiivinen komponentti roottorin virta muuttuu, eli asynkroninen kone menee sisään generaattoritila. Samalla myös sähkömagneettisen vääntömomentin suunta muuttuu, mikä muuttuu jarrutukseksi. Liuku generaattoritilassa.
Asynkronisen koneen käyttämiseksi generaattoritilassa tarvitaan loisteholähde, joka luo magneettikentän. Jos staattorikäämissä ei ole alkuperäistä magneettikenttää, vuo luodaan kestomagneeteilla tai aktiivisella kuormalla, joka johtuu koneen jäännösinduktiosta ja kondensaattoreista, jotka on kytketty rinnakkain staattorikäämin vaiheiden kanssa.
Asynkroninen generaattori kuluttaa loisvirtaa ja vaatii loistehogeneraattoreiden läsnäoloa verkossa synkronisten koneiden, synkronisten kompensaattoreiden, staattisten kondensaattoripankkien (BSK) muodossa. Tästä syystä huollon helppoudesta huolimatta asynkroninen generaattori käytetään suhteellisen harvoin, pääasiassa pienitehoisina tuuligeneraattoreina, pienitehoisena apulähteenä ja jarrulaitteina. Mutta asynkronisen moottorin generaattoritilaa käytetään melko usein. Tässä tilassa metron liukuportaiden moottorit toimivat, jotka laskevat. Generaattoritilassa hissin moottorit toimivat ohjaamon ja vastapainon painosuhteen mukaan.
Lepotila
Asynkronisen moottorin joutokäyntitila tapahtuu, kun akselilla ei ole kuormitusta vaihteiston ja työkappaleen muodossa. Tyhjäkäynnin kokemuksen perusteella voidaan määrittää magnetointivirran arvot ja tehohäviöt magneettipiirissä, laakereissa ja tuulettimessa. Todellinen tyhjäkäynti s=0,01-0,08. Täydellisessä tyhjäkäyntitilassa n 2 =n 1 siis s=0 (itse asiassa tämä tila on saavuttamaton, vaikka olettaen, että laakereiden kitka ei luo omaa kuormitusmomenttiaan - moottorin toiminnan periaate tarkoittaa, että roottori jää jäljessä staattorikentästä roottorikentän luomiseksi. Kun s=0 staattorikenttä ei kulje roottorin käämien yli eikä voi indusoida siihen virtaa, mikä tarkoittaa, että roottorin magneettikenttää ei synny.)
Sähkömagneettinen jarrutila (lisävaruste)
Jos muutat roottorin tai magneettikentän pyörimissuuntaa niin, että ne pyörivät vastakkaisiin suuntiin, niin EMF ja virran aktiivinen komponentti roottorin käämissä ohjataan samalla tavalla kuin moottoritilassa, ja laite kuluttaa aktiivista virtaa verkosta. Sähkömagneettinen momentti kuitenkin suuntautuu kuormitusmomentin vastakkaiseen suuntaan, koska se on jarrutusmomentti. Seuraavat epätasa-arvot pätevät järjestelmään:
Tätä tilaa käytetään lyhyen aikaa, koska sen aikana roottoriin muodostuu paljon lämpöä, jota moottori ei pysty haihduttamaan, mikä voi vahingoittaa sitä.
Pehmeämpään jarrutukseen voidaan käyttää generaattoritilaa, mutta se toimii vain lähellä nimelliskierroksia.
Tapoja ohjata asynkronista moottoria
Asynkronisen AC-moottorin ohjauksella tarkoitetaan roottorin nopeuden ja/tai sen vääntömomentin muutosta. Asynkronista moottoria voi ohjata seuraavilla tavoilla:
- reostaattinen - IM:n pyörimisnopeuden muuttaminen vaiheroottorilla muuttamalla reostaatin vastusta roottoripiirissä, lisäksi tämä lisää käynnistysmomenttia;
- taajuus - HELL:n pyörimisnopeuden muutos muuttamalla virran taajuutta syöttöverkossa, mikä aiheuttaa muutoksen staattorikentän pyörimistaajuudessa. Moottori käynnistetään kautta TAAJUUSMUUNNIN;
- käämien kytkeminen "tähti"-piiristä "kolmio"-piiriin moottorin käynnistyksen yhteydessä, mikä vähentää käämien käynnistysvirtoja noin kolme kertaa, mutta samalla myös vääntömomentti pienenee;
- pulssi - syöttämällä erityinen syöttöjännite (esimerkiksi sahahammas);
- ylimääräisen emf:n käyttöönotto toisiopiirin liukutaajuuden mukaisesti tai sitä vastapäätä;
- napaparien lukumäärän muutos, jos tällainen kytkentä on toteutettu rakentavasti (vain oikosulkuroottoreille);
- muuttamalla syöttöjännitteen amplitudia, kun vain ohjausjännitteen amplitudi (tai tehollinen arvo) muuttuu. Tällöin ohjaus- ja herätejännitevektorit pysyvät kohtisuorassa (automuuntajan käynnistys);
- amplitudi-vaihemenetelmä sisältää kaksi kuvattua menetelmää;
- sisällyttäminen reaktorien staattorin tehopiiriin;
Huomautuksia
Katso myös
- Veshenevsky S. N. Sähkökäytön moottoreiden ominaisuudet. Painos 6, tarkistettu. Moskova, Energia Publishing House, 1977. Levikki 40 000 kpl. UDC 62-83:621,313.2
Linkit
- Asynkronisten sähkömoottorien laite ja toimintaperiaate
- Gaidullin Alexander "Asynkronisen moottorin 4A200 kokoonpano"
- Kolmivaiheisen virran asynkroninen sähkömoottori M. O. Dolivo-Dobrovolsky
| |||||||||||
Asynkronisen koneen laite. Vaihtovirtakoneen kiinteää osaa kutsutaan staattoriksi ja liikkuvaa osaa kutsutaan
roottori. Asynkronisten koneiden staattori- ja roottoriytimet kootaan sähköteräslevyistä (kuva 19-1), jotka yleensä pinnoitetaan molemmilta puolilta öljy-hartsieristelakalla ennen asennusta. Pienitehoisten koneiden ytimet kootaan joskus lakattamattomista levyistä, koska tällöin teräslevyjen pinnalle muodostuva luonnollinen tai keinotekoisesti muodostettu oksidikerros on riittävä eriste.
Kuvassa Kuva 19-2 on räjäytyskuva pienestä tehoinduktiomoottorista, jossa näkyy staattori, roottori ja päätyvaipat. Kuvassa 19-3 on piirros keskitehoisesta induktiomoottorista.
Riisi. 19-1. Staattorin ydinlevyt (1) ja pienen ja keskitehoisen asynkronisen koneen roottori (2).
Staattorin sydän on kiinnitetty koteloon ja roottorin sydän -akselilla^ (pieni- ja keskitehoiset koneet) tai vanteella, jossa akseli ja holkki on asetettu akselille (suurtehoiset koneet) Roottorin akseli pyörii laakereissa, jotka on sijoitettu staattorin koteloon kiinnitettyihin laakerikilpiin (koneen kovy "pinot 11 М0ШН0Стиi) "tai osa-asennettuihin laakereihin
Staattorin sylinterimäisessä sisäpinnassa ja roottorin sylinterimäisessä ulkopinnassa on uria,

Riisi. 19-2. Kuva asynkronisesta moottorista, jossa on oravahäkkiroottori tyyppi A71-6, teho 14 ket purettu
johon staattorin ja roottorin käämien johtimet on sijoitettu. Staattorin käämitys on yleensä kolmivaiheinen (katso luku 21); on kytketty kolmivaiheiseen virtaverkkoon ja siksi sitä kutsutaan myös ensiökäämiksi. Roottorin käämitys voidaan tehdä myös kolmivaiheiseksi staattorin käämityksen kaltaiseksi. Tällaisen roottorin käämityksen vaiheiden päät yhdistetään yleensä tähdeksi ja alkukohdat tuodaan esiin liukurenkaiden ja metalligrafiittiharjojen avulla (kuva 19-3). Tällaista asynkronista konetta kutsutaan käämitysroottorikoneeksi. Liukurenkaisiin liitetään yleensä kolmivaiheinen käynnistys- tai säätöreostaatti. Roottorin vaihekäämitys suoritetaan samalla määrällä magneettikentän napoja kuin staattorissa.
Toinen roottorin käämitystyyppi on oravahäkin muotoinen käämi (kuva 19-4). Tässä tapauksessa jokaisessa urassa on kupari- tai alumiinitanko ja kaikkien sauvojen päät
roottorin molemmista päistä on yhdistetty kupari- tai alumiinirenkailla, jotka oikosulkevat tangot. Tankoja ei yleensä ole eristetty ytimestä. Koneissa 1QG asti k&p tangot ja renkaat yhdessä tuuletusta varten olevien siipien kanssa valmistetaan yleensä kaatamalla alumiinia roottoriin
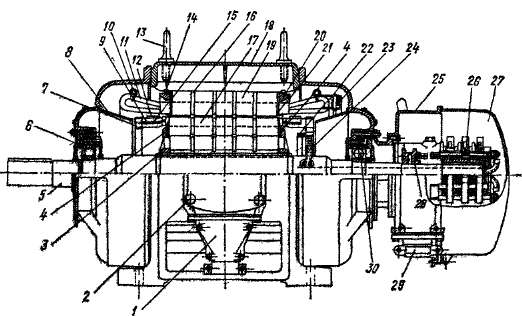
Kuva 19-3 180 Kolmivaiheinen käärinroottori-induktiomoottori ket,
975 rpm
1 - kaapelikotelo, 2 - staattorikäämin päiden ulostulorasia, 3 - rengastappi roottorin sydämen kiinnittämiseen, 4 - roottorin sydämen painepesurit, 5 - roottorin akseli, 6 ja 30 - kuula- ja rullalaakerit, 7 - roottorin käämitankojen kupariset liitoskaulukset, 8 -^ diffuusorit tulevan jäähdytysilman ohjaamiseksi vuorauksen suojien läpi, 9 - roottorin kelaustangot^, "10 - kiinnitysrenkaat, // - staattorin käämitys, 12 - lankasiteet! roottori, 13 - nostorenkaat, /* - kaarinäppäimet, 15 - rengaseristystiivisteet, 16 - radiaaliset ilmanvaihtokanavat, 17 - roottorin ydin, ON->j valettu staattorikotelo, 19 - staattorin ydin, 20 ja 21 - painetyynyt ja staattorin ydinrengas, 22 - rengas roottorin käämityksen päiden liittämiseksi tähdeksi, 23 - «staattorikäämin kelojen ja ryhmien väliset liitännät, 34 - roottorin käämityksen coc* tsov johtopäätökset liukurenkaiksi,. 25 ja 27 - liukurenkaiden laatikko ja korkki, 26 - kontaktirenkaat, 28 - liikkuva holkki, jossa kontaktit suljettua varten^. roottorin käämitysjohdot ovat oikosulussa, 29 - kytkentä rotran käämitysjohtimien ulostuloa varten
ulkoiseen piiriin
(Katso kuva J9-2). Tällaista asynkronista konetta kutsutaan oravahäkkikoneeksi. Useimmissa kronokoneissa, erityisesti pienissä ja keskitehoisissa koneissa, on oikosuljettu gpTopOM.
Ilmarako staattorin ja roottorin välillä asynkronisissa koneissa on tuotantoolosuhteiden ja toimintavarmuuden kannalta pienin mahdollinen, ja mitä suurempi mitä suurempi kone, sitä suurempi. Koneissa, joiden teho on useita kilowatteja, rako
on 0,4-0,5 mm, ja suuritehoisissa koneissa - muutama millimetri.
Asynkroniset koneet ovat yleensä ilmajäähdytteisiä. Ilmanvaihtojärjestelmät ovat periaatteessa samat kuin tasavirtakoneissa (ks. § 8-5).
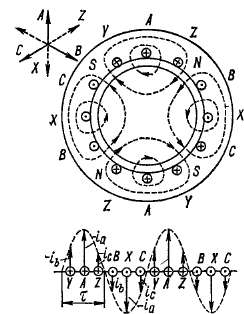
Pyörivä magneettikenttä. Kuvassa 19-5 ovat poikkileikkauksia bipolaarista (2s- 2) oikosulkumoottori ja näyttää staattorin magneettikentän luonteen kahdessa ajassa.
Kuvassa 19-5 esittää yksinkertaisinta staattorikäämitystä, kun jokainen vaihe koostuu yhdestä kierrosta tai kahdesta johtimesta (1. vaihe - johtimet MUTTA ja x, 2. vaihe - johtimet AT ja Y, 3. vaihe - johtimet FROM ja Z) 1. Jokaisen kierroksen (vaiheen) johtimet sijaitsevat - toisistaan napojen jaon etäisyydellä
missä D a- staattorin sisäreiän halkaisija, ar - napaparien lukumäärä.
Kuvassa 19-5-napainen jako tekee suljetun käämityksen ympyrän puolikkaasta. Kelan tai rullan nousu oravan keen muodossa klo on siis valmis (at= t). Kaksi solua
360° el. Vaiheiden alku A, B, C siirretty suhteessa toisiinsa 120° el., joka tässä tapauksessa on kolmasosa ympyrästä.
Kuvassa 19-5, a staattorikäämin johtimien virtojen suunnat on esitetty ajanhetkelle, jolloin minä tähtään ja minä b= i c =
- - *)t- Vaihevirrat kuvassa. 19-5 katsotaan positiiviseksi, kun
ne ovat vaiheiden alussa (johtimet A, B, C) suunnattu piirustuksen tason ulkopuolelle. Kuvassa 19-5, b Virtojen suunnat näytetään ajanhetkelle, jolloin virtojen vaiheet ovat muuttuneet 30° ja
Kuvasta Kuvasta 19-5 voidaan nähdä, että virtojen jakautuminen staattorin kehän ympäri on kaksi vyöhykettä, joista kummankin arvo on m, ja suunta on
1 GOST 183-66:n mukaan staattorikäämien vaiheiden alku on merkitty C 1 (C 2, 3 alkaen, niiden päät - vastaavasti C 4, C 8, C g ja roottorin käämien vaiheiden alku - Pi, P 2 > ^z- Tässä kirjassa metodologisista syistä kolmivaiheisten käämien alkua on merkitty kaikkialla A, B, C tai a, b, c, ja päät - vastaavasti L, Y, Z tai x, y, g.
![]()
virrat näillä vyöhykkeillä ovat vastakkaisia. Kuvan alaosassa. Kuvat 19-5 esittävät virran jakautumiskäyrät käytössä olevaa staattoria pitkin.
Näistä käyristä voidaan nähdä, että virrat jakautuvat staattorin pinnalle sinimuotoisen lain mukaan.
Kaksinapaisen koneen staattorikäämin johtimien virrat luodaan kuvan 1 mukaisesti. 19-5, bipolaarinen magneettivuo
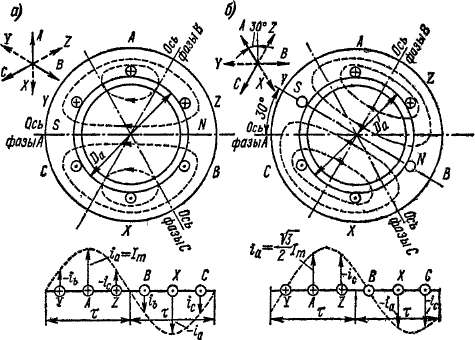
Riisi. 19-5. Yksinkertaisin asynkronisen koneen staattorikäämitys, jonka 2p = 2 ja sen magneettikenttä
Ф 1 (kulkee staattorin, roottorin ja niiden välisen ilmaraon läpi. Kuvan 19-5 vertailusta, ai b Voidaan nähdä, että kun virtojen vaihe muuttuu 30°, virran jakautumiskäyrä ja magneettivuo pyörivät vaiheiden suuntaan myös 30° el.
Vaiheen kääntöakseli (käämitys). MUTTA kuvassa 19-5 on suunnattu vaakasuoraan ja magneettivuon akseli kohti i a = l m(Kuva 19-5, a) on myös suunnattu vaakasuoraan. On selvää, että jos virtojen vaihe verrattuna kuvioon. 19-5, a muuttuu 120° ja siksi tulee olemaan minä b \u003d olen, silloin magneettivuo suunnataan pitkin vaiheakselia AT, eli kääntyy 120° el. Sillä hetkellä, jolloin i c- Olen , magneettivuon akseli on sama kuin vaiheen C akseli jne.
Siten kaksinapaisen koneen staattorikäämi, kun se saa virtansa kolmivaihevirrasta, luo kaksinapaisen pyörivän magneettikentän.
Tässä tapauksessa yhden virran muutosjakson aikana kenttä pyörii 2 tonnia tai 360 ° el.
Kentän pyörimisnopeus
n i - h rpm,
jossa fi on staattorivirran taajuus.
Magneettikenttä pyörii vaihejärjestyksen suuntaan A, B, C staattorin käämit. Kentän pyörimissuunnan muuttamiseksi päinvastaiseksi riittää, että vaihdat paikkoja käämin puristimissa klo ki kahden sähköverkosta tulevan johtimen staattorin päät.
Arvolla 2p \u003d 4 napajako on neljäsosa ympyrästä ja yksinkertaisimman kolmivaiheisen staattorikäämin (kuva 19-6) jokainen vaihe koostuu kahdesta kierroksesta, joissa on askel y = x, joita on siirretty toisiinsa nähden 2 m ja ne voidaan kytkeä toisiinsa sarjaan tai rinnan. Yksittäiset vaiheet ja niiden alku A, B, C samalla siirrettynä suhteessa toisiinsa 120 ° el. tai tässä tapauksessa 1/6 ympyrästä. Kuvasta 19-6 voidaan nähdä, että tällainen käämi luo virran jakautumiskäyrän ja magneettikentän 2p \u003d 4. Tämä kenttä on myös pyörivä ja yhdelle
myös virran jakso pyörii 2m eli tässä tapauksessa puoli ympyrää, minkä seurauksena kentän nopeus
p g = y, obIsec.
Yleisessä tapauksessa on mahdollista tehdä käämitys 2p = 6, 8, 10 jne. Tällöin saadaan virran jakautumiskäyrä ja magneettikenttä p napaparilla. Magneettikenttä pyörii nopeudella
Riisi. 19-6. Yksinkertaisin käämitys
asynkronisen koneen staattori
2p - 4 ja sen magneettikenttä

Kentän lineaarinen pyörimisnopeus staattorin kehällä
Tavallisella teollisuusvirran taajuudella Neuvostoliitossa / = 50 Hz kentän pyörimisnopeudet saadaan taulukossa esitetyllä tavalla. 19-1.
Taulukko 19-1
Käämien magneettikentän pyörimisnopeus, joissa on eri määrä napapareja R L = 50 Hz
| R | ||||||||||
| Px, R/MUH |
Vaihtovirtakäämityksiä suunniteltaessa ne pyrkivät (ks. luku 21) siihen, että ilmaraon pyörivän kentän induktion jakautuminen kehällä on mahdollisimman lähellä sinimuotoista.
Myöhemmin tässä luvussa oletetaan, että tämä jakauma on sinimuotoinen.
Asynkronisen koneen toimintaperiaate. Magneettivuo Ф 1 (staattorikäämin (kuvat 19-5 ja 19-6) muodostama) ylittää pyörimisensä aikana roottorin käämityksen johtimet ja indusoi niihin emf:n. e p, ja jos roottorin käämi on suljettu, siinä syntyy virtoja c, jonka taajuus f 2 kiinteällä roottorilla (i \u003d 0) on yhtä suuri kuin ensiötaajuus f t .
Jos roottorin käämitys on kolmivaiheinen, siihen indusoituu kolmivaiheinen virta. Tämä virta muodostaa roottorin F 2 pyörivän vuon, jonka napojen lukumäärä on 2 p, jonka pyörimissuunta ja nopeus on n = 0
sama kuin staattorin vuo. Siksi virtaa F g ja F a pyörivät synkronisesti ja muodostavat moottorin F yhteisen pyörivän virtauksen. Oravahäkkiroottorilla sen sauvoissa indusoidaan monivaiheinen virtajärjestelmä %, jossa vierekkäisten sauvojen vaihesiirto tapahtuu kulman verran
![]()

jossa Z 2 on roottorin tankojen lukumäärä. Nämä virrat muodostavat myös pyörivän vuon Ф 2, jonka napojen lukumäärä on sama kuin vaiheroottorivuon pyörimissuunta ja nopeus. Siksi tässä tapauksessa myös moottoriin muodostuu yhteinen magneettivuo F. Yhteisen pyörivän magneettikentän olemassaolon huomioon ottaen voidaan harkita esim. d.s., jonka tämä kenttä indusoi käämeissä.
Roottorin virtojen vuorovaikutuksesta virtauksen kanssa syntyy roottorin johtimiin vaikuttavia mekaanisia voimia F ja pyörivä sähkömagneettinen momentti M.
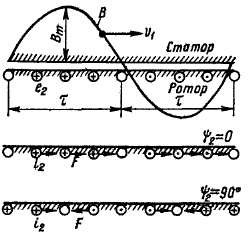
Kuvan yläosassa. Kuvat 19-7 esittävät yleisen magneettikentän siniaallon, joka pyörii nopeudella i>i AT koneet ja ohjeet e. d.s. e2, jonka tämä kenttä aiheuttaa kiinteän oravahäkkiroottorin sauvoissa. Kuvan alaosassa. 19-7 näyttää sauvojen virtojen suunnat, c ja niihin vaikuttavista voimista F kahdessa tapauksessa: kun vaihesiirtokulma "fa e:n ja r 2:n välillä on nolla ja kun ■ph 2 \u003d 90, At% \u003d 0, kaikki voimat vaikuttavat pyörimiskentän suuntaan. Siksi vääntömomentti
Kuva 19-7. Roottorin käämityksen sauvojen virrat ja niihin vaikuttavat voimat
eroaa nollasta ja toimii myös kentän pyörimissuunnassa. Samaan aikaan, kun t | e a \u003d 90 °, voimat vaikuttavat eri puolia
ja M= 0.
Tästä seuraa, että vääntömomentin muodostaa vain roottorivirran aktiivinen komponentti
Tämä päätelmä on luonteeltaan yleinen ja pätee myös muuntyyppisiin vaihtovirtakoneisiin.
Asynkronisen moottorin roottoripiirillä on aina tietty aktiivinen vastus, ja siksi moottoria käynnistettäessä (n = 0) aina 0< t|) 2 < 90°. В результате развиваемый момент M> Q, ja jos se on suurempi kuin akselin staattinen jarrutusmomentti, niin moottorin roottori alkaa pyöriä kentän pyörimissuuntaan tietyllä nopeudella P<; p b eli se pyörii jonkin verran viiveellä tai luistolla suhteessa staattorikenttään,
![]()
![]()
Suhteellinen ero kentän ja roottorin pyörimisnopeuksien välillä

nimeltä lipsahdus. Poikkeama ilmaistaan myös prosentteina:
Roottorin nopeus P, ilmaistuna liukumana s kaavan (19-6) mukaisesti on yhtä suuri kuin
Moottoria käynnistettäessä (P= 0) meillä on s = 1, ja kun roottori pyörii synkronisesti staattorikentän kanssa tai, kuten sanotaan, synkronisella nopeudella (P= p d) tulee olemaan s = O. Milloin n = n x staattorin magneettikenttä suhteessa roottoriin on paikallaan ja roottorissa olevat virrat eivät indusoidu, joten M= 0 ja moottori ei voi saavuttaa tällaista pyörimisnopeutta. Tämän seurauksena moottoritilassa se on aina 0< /г <п х ja l>s>0.
Kun roottori pyörii kenttää kohti, taajuus, joka ylittää roottorin johtimet kentän kautta, on verrannollinen nopeuseroon tii- P ja roottorin käämityksen virran taajuus
Korvaa arvo tässä P kaavasta (19-7) ja sitten arvo n x alkaen (19-2), saamme
eli toisiotaajuus on verrannollinen jättämään.
Nykyisellä taajuudella / 2< f t roottorikentän pyörimisnopeus suhteessa itse roottoriin n 2p on myös pienempi p g ja perustuu lausekkeeseen (19-9)
Roottorikentän pyörimisnopeus suhteessa staattoriin lausekkeiden (19-7) ja (19-10) mukaisesti
eli roottorikentän pyörimisnopeus suhteessa staattoriin millä tahansa roottorin pyörimisnopeudella P yhtä suuri kuin staattorikentän pyörimisnopeus p x. Siksi myös staattorin ja pyörivällä roottorilla varustetun roottorin kentät pyörivät aina synkronisesti ja muodostavat yhteisen pyörimiskentän.
Huomaa, että kuvassa näkyy. 19-7 kuva virtojen ja mekaanisten voimien suunnasta pätee myös roottorin pyöriessä, kun 0< P< n x(moottoritila).
Jos asynkronisen koneen roottori saatetaan ulkoisen voiman (vääntömomentin) avulla pyörimään staattorikentän pyörimissuunnassa synkronista suuremmalla nopeudella (P> p d), silloin roottori ohittaa roottorin käämitykseen indusoituneiden virtojen kentän ja suunnat verrattuna kuvassa 2 esitettyihin. 19-7 on päinvastainen. Tällöin myös sähkömagneettisten voimien suunnat ovat käänteisiä F ja sähkömagneettinen momentti M. Hetki M tässä tapauksessa se jarruttaa, ja kone toimii generaattoritilassa ja antaa aktiivista tehoa verkkoon. Lausekkeen (19-6) mukaan generaattoritilassa s< 0.
Jos roottoria pyöritetään vastakkaiseen suuntaan kuin staattorikentän pyörimissuunta (P< 0), то указанные на рис. 19-7 направления е 2 , / 2 и F on tallennettu. Sähkömagneettinen momentti M toimii staattorikentän pyörimissuunnassa, mutta hidastaa roottorin pyörimistä. Tätä asynkronisen koneen toimintatapaa kutsutaan vastainkluusiotilaksi tai sähkömagneettiseksi jarrutusmoodiksi. Tässä tilassa lausekkeen (19-6) mukaisesti s> 1.
Asynkronisen koneen toimintatapoja käsitellään tarkemmin seuraavassa osiossa. Tässä on kuitenkin huomioitava, että suhde (19-11), kuten se on helppo havaita, säilyy kaikissa toimintatavoissa, mille tahansa s:n arvolle, eli staattorin ja roottorin kentät pyörivät synkronisesti mikä tahansa asynkronisen koneen toimintatapa.
Asynkroninen kone on harjaton AC-kone, jossa pyörivä magneettikenttä virittyy toiminnan aikana, mutta roottori pyörii asynkronisesti, ts. jonka kulmanopeus eroaa kentän kulmanopeudesta.
Induktiomoottorit ovat yleisimpiä moottoreista. Niiden etuja ovat laitteen yksinkertaisuus, korkea luotettavuus ja suhteellisen alhaiset kustannukset.
Kolmivaiheiset asynkroniset moottorit, joita on ehdottanut M.O. Dolivo-Dobrovolsky vuonna 1888. Ne suoritetaan teholla watin murto-osista tuhansiin kilowatteihin, pyörimistaajuudella 500-3000 rpm ja jännitteellä jopa 10 kV. Yksivaiheisia asynkronisia moottoreita käytetään ohjaamaan kodinkoneita, sähkötyökaluja, automaatiopiireissä. Ne saavat virtaa yksivaiheisesta piiristä, ja niiden teho on yleensä enintään 0,5 kW.
Asynkroniset koneet voivat toimia generaattoritilassa. Mutta sähköenergian lähteinä niitä ei käytetä melkein koskaan, koska niillä ei ole omaa magneettivuon virityslähdettä ja ne ovat suorituskyvyltään huonompia kuin synkroniset generaattorit.
Asynkronisia koneita käytetään jännitteensäätiminä, vaihesäätiminä, taajuusmuuttajina jne.
Asynkronisten koneiden haittana on niiden suorituskyvyn monimutkaisuus ja epätaloudellinen säätely.
Asynkroninen moottori koostuu staattorista, roottorista ja päätykilpeistä. Staattori on moottorin kiinteä osa ja sillä on sylinterimäinen muoto. Se koostuu rungosta, ytimestä ja käämistä. Runko on valuterästä tai valurautaa. Staattorin magneettipiiri on koottu ohuista sähköteräslevyistä. Sen sisäpinnassa on urat, joihin staattorin käämitys sopii. Oikosulkumoottorin roottori - pyörivä osa - koostuu teräsakselista, magneettisesta piiristä, joka on valmistettu sähköteräslevyistä, joissa on leimattuja uria. Roottorin käämitys voi olla oikosulku tai vaihe. Oikosuljettu käämitys on valmistettu alumiini- tai kuparitankoista, jotka on oikosuljettu roottorin molemmissa päissä. Vaiheroottorissa on kolmivaiheinen käämitys, joka on kytketty tähteen. Käämijohdot liitetään akselin renkaisiin ja liitetään reostaattiin tai muuhun laitteeseen harjojen avulla. Pyörivä roottori asetetaan yhteiselle akselille staattorin kanssa. Akseli pyörii laakerikilpeissä. Staattorikäämin kytkentä suoritetaan laatikossa, johon tuodaan ulos vaiheiden C 1, C 2, C 3 alkukohdat ja vaiheiden C 4, C 5, C 6 päät. Kuvassa näyttää näiden päätelmien (a) asettelun ja tapoja kytkeä ne toisiinsa, kun vaihekäämit yhdistetään tähdellä (b) ja kolmiolla (c).
Jos moottoripassiin on merkitty kaksi jännitettä, esimerkiksi 380/220, niin tähtiliitäntä vastaa korkeampaa jännitettä, kolmioliitäntä pienempää. Molemmissa tapauksissa moottorin vaihejännite on 220 V.
Kolmivaiheinen staattorikäämitys luo magneettikentän, joka pyörii nopeudella  .
.
Staattorin ja roottorin välinen sähkömagneettinen vuorovaikutus tapahtuu vain silloin, kun staattorikentän nopeus ja roottorin pyörimisnopeus eivät ole samat.
Asynkronisen koneen staattorin pyörivä magneettikenttä. Staattorikentän pyörimistaajuus, luisto (ominaisuudet).
Induktiomoottorin toiminnan perusta on pyörivä magneettikenttä. Pyörivän magneettikentän saamisen periaate on, että jos vaihesiirretyt virrat kulkevat avaruudessa ympyrää pitkin jakautuneen johdinjärjestelmän läpi, avaruuteen syntyy pyörivä kenttä.
R 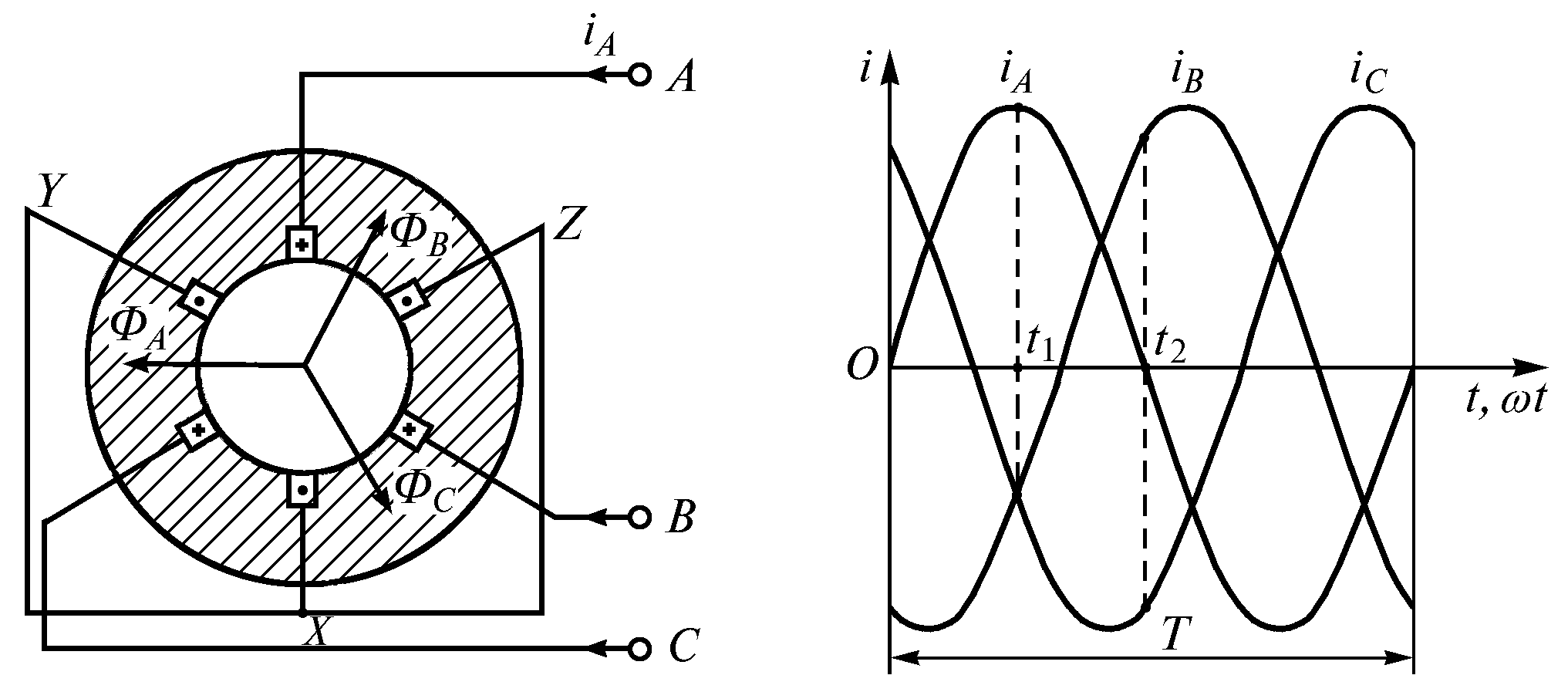 Harkitse pyörivän kentän hankkimista kolmivaiheiseen moottoriin. Kuvassa Kuvassa 1 on esitetty kolmivaiheinen käämitys A–
X,
B
– Y,
C
– Z, kukin yhden kelan muodossa. Kolmivaiheinen virtajärjestelmä syötetään virtalähteestä käämiin
Harkitse pyörivän kentän hankkimista kolmivaiheiseen moottoriin. Kuvassa Kuvassa 1 on esitetty kolmivaiheinen käämitys A–
X,
B
– Y,
C
– Z, kukin yhden kelan muodossa. Kolmivaiheinen virtajärjestelmä syötetään virtalähteestä käämiin  ;
;![]() ;
; .
.
Jos staattorikäämin vaiheet on kytketty 3-vaiheiseen verkkovirtaan, syntyy virtoja, jotka luovat magneettikentän induktiolla:  ;
; ;. Kenttäinduktion komponentti X-akselia pitkin on yhtä suuri kuin yksittäisten vaiheiden induktioiden hetkellisten arvojen projektioiden algebrallinen summa tälle akselille, ts.
;. Kenttäinduktion komponentti X-akselia pitkin on yhtä suuri kuin yksittäisten vaiheiden induktioiden hetkellisten arvojen projektioiden algebrallinen summa tälle akselille, ts.
 . Samalla tavalla löydämme projektion Y-akselilta.
. Samalla tavalla löydämme projektion Y-akselilta.  . Tämän seurauksena staattorikentän magneettinen induktio on yhtä suuri kuin:
. Tämän seurauksena staattorikentän magneettinen induktio on yhtä suuri kuin:
Magneettikentän induktio on vakio, ja itse staattorikentällä on projektiot X- ja Y-akselilla, vastaavasti: 
Leikkauskentän V-tai induktio sijaitsee kulmassa y-akseliin nähden 
 ,
,
 , jossa T on nykyisen muutoksen jakso,
, jossa T on nykyisen muutoksen jakso,  -syklinen taajuus
-syklinen taajuus
Tällä tavalla, kolmivaiheinen käämitys 120° siirrettyjen virtojen syöttämä muodostaa pyörivän magneettikentän. Tuloksena oleva virtaus pysyy muuttumattomana ja on yhtä suuri kuin 1,5 vaiheen maksimivirtauksesta. Tämän vuon suunta on aina sama kuin sen vaiheen magneettivuon suunta, jossa virta on tällä hetkellä suurin. Siksi pyörimissuunnan vaihtamiseksi on tarpeen vaihtaa kaksi vaihetta.
Tarkasteltavat esimerkit viittaavat kaksinapaiseen käämitysmalliin () kentän kiertotaajuudella. Yleisessä tapauksessa kentän pyörimistaajuus, jossa on koneen napaparien lukumäärä; on staattorivirran taajuus.
Arvo tai  nimeltään liukuvat asynkroninen kone, missä
nimeltään liukuvat asynkroninen kone, missä  - staattorikentän pyörimistaajuus,
- staattorikentän pyörimistaajuus,  - roottorin pyörimistaajuus.
- roottorin pyörimistaajuus.
Suhteesta riippuen ja toimintatilaa on kolme: moottoritilassa; generaattoritilassa; sähkömagneettisessa jarrutilassa.
Työskentele moottoritilassa. Staattorin ja roottorin magneettikenttien vuorovaikutuksen sähkömagneettiset voimat luovat vääntömomentin staattorikentän pyörimissuunnassa. Nopeus, jolla moottori pyörii, riippuu sen kuormituksesta. Tyhjäkäynnillä nopeudesta tulee lähes yhtä suuri, koska = 0 EMF ja roottorin virrat ovat nolla ja sähkömagneettinen vuorovaikutus katoaa. Siten asynkroninen kone toimii moottoritilassa välillä = 0 - ts. kun liu'utetaan +1:stä 0:aan. Tässä tapauksessa verkosta staattoriin syötetty sähköenergia muunnetaan mekaaniseksi energiaksi akselilla.
Työskentele generaattoritilassa. Oletetaan, että verkkoon kytketty staattori muodostaa pyörivän magneettikentän ja roottoria ajetaan samaan suuntaan nopeudella. Tässä tapauksessa luisto on negatiivinen ja EMF- ja roottorivirrat muuttavat suuntaa verrattuna toimintaan moottoritilassa. Akselin vääntömomentti jarruttaa suhteessa voimakoneen vääntömomenttiin. Asynkroninen kone toimii generaattorina. Kuiluun syötetty mekaaninen energia muunnetaan sähköenergiaksi ja siirretään verkkoon. Siten asynkroninen kone voi toimia generaattoritilassa rinnakkain verkon kanssa otdon rajoissa, ts. liukuessaan pois  ennen.
ennen.
Työskentele sähkömagneettisessa jarrutilassa. Oletetaan, että roottoria ajetaan staattorin magneettivuon pyörimissuuntaa vastaan. Tässä tapauksessa energiaa syötetään asynkroniseen koneeseen kahdelta puolelta - sähkö verkosta ja mekaaninen voimanlähteestä. Tätä toimintatapaa kutsutaan sähkömagneettiseksi jarrutustilaksi. Se tapahtuu liukuessaan kohdasta toiseen.
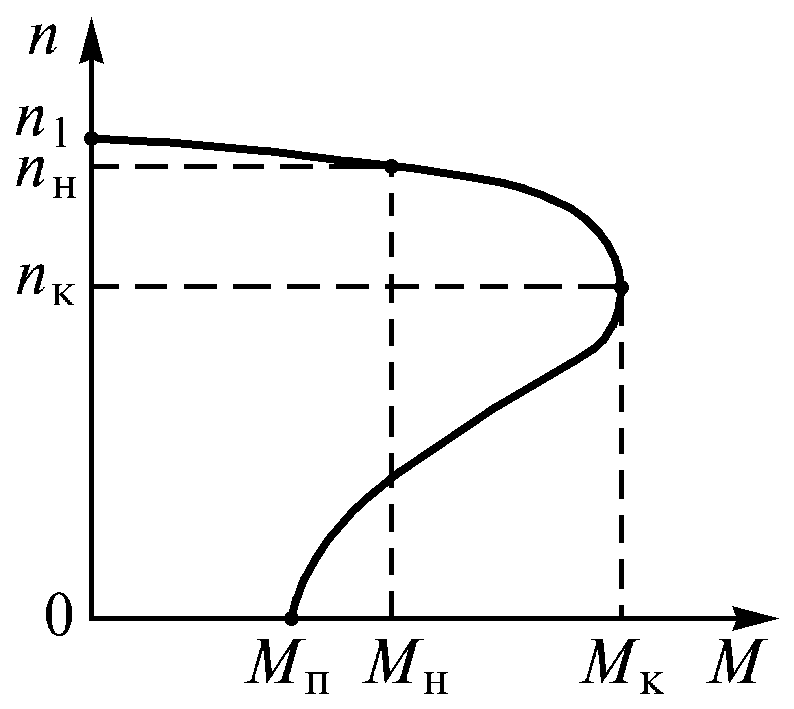
 - maksimi hetki
- maksimi hetki
 - Käynnistysmomentti
- Käynnistysmomentti
 - nimellinen hetki
- nimellinen hetki
Moottorin mekaaninen ominaisuus on roottorin nopeuden riippuvuus akselin vääntömomentista. Koska joutokäyntimomentti on pieni kuormituksen alaisena, mekaanista ominaisuutta edustaa riippuvuus. Jos otamme huomioon suhteen, niin mekaaninen ominaisuus voidaan saada esittämällä sen graafinen riippuvuus koordinaatteina
Asynkronisessa koneessa on staattori ja roottori, jotka on erotettu toisistaan ilmaraolla. Sen aktiiviset osat ovat käämit ja magneettipiiri (ydin); kaikki muut osat ovat rakenteellisia ja tarjoavat tarvittavan lujuuden, jäykkyyden, jäähdytyksen, pyörimismahdollisuuden jne.
Staattorin käämitys on kolmivaiheinen (yleensä monivaiheinen) käämi, jonka johtimet jakautuvat tasaisesti staattorin kehän ympärille ja asetetaan vaihe vaiheelta uriin, joiden kulmaetäisyys on 120 °. Staattorikäämin vaiheet on kytketty standardien "kolmio" tai "tähti" mukaisesti ja kytketty kolmivaiheiseen virtaverkkoon. Staattorin magneettipiiri uudelleenmagnetoidaan staattorikäämin virran muuttamisen yhteydessä, joten se rekrytoidaan sähköteräslevyistä minimaalisten magneettihäviöiden varmistamiseksi. Päämenetelmä magneettipiirin kokoamiseksi pakkaukseksi on sekoittaminen.
Roottorin suunnittelun mukaan asynkroniset koneet jaetaan kahteen päätyyppiin: kanssa oikosuljettu roottori ja vaihe roottori. Molemmilla tyypeillä on sama staattorirakenne ja ne eroavat vain roottorin käämityksen rakenteesta. Roottorin magneettipiiri on valmistettu samalla tavalla kuin staattorin magneettipiiri - sähköteräslevyistä.
asynkroninen kone- vaihtovirtasähkökone, jonka roottorin nopeus ei ole yhtä suuri (moottoritilassa pienempi) kuin staattorin käämivirran synnyttämän magneettikentän pyörimistaajuus.
Useissa maissa kommutaattorikoneet luokitellaan myös asynkronisiksi koneiksi. Toinen nimi asynkronisille koneille on induktio johtuen siitä, että staattorin pyörivä kenttä aiheuttaa roottorin käämin virran. Asynkroniset koneet muodostavat nykyään suurimman osan sähkökoneista. Niitä käytetään pääasiassa sähkömoottoreina ja ne ovat tärkeimpiä sähköenergian muuntajia mekaaniseksi energiaksi, ja niitä käytetään pääasiassa asynkroniset moottorit oravahäkkiroottorilla (ADKZ).
Edut (ADKZ:lle):
- Valmistuksen helppous.
- Suhteellinen halpa.
- Korkea toimintavarmuus.
- Alhaiset käyttökustannukset.
- Mahdollisuus muodostaa yhteys verkkoon ilman muuntimia (kuormille, jotka eivät tarvitse nopeudensäätöä).
Kaikki edellä mainitut edut ovat seurausta mekaanisten kommutaattorien puuttumisesta roottoripiirissä ja ovat johtaneet siihen, että suurin osa teollisuudessa käytetyistä sähkömoottoreista on ADKZ:n suorittamia asynkronisia koneita.
Virheet:
- Pieni aloitushetki.
- Merkittävä käynnistysvirta.
- Matala tehokerroin.
- Nopeudensäädön monimutkaisuus vaaditulla tarkkuudella.
- Moottorin enimmäisnopeutta rajoittaa verkkotaajuus (ADKZ:lle, joka saa virran suoraan kolmivaiheinen verkko 50 Hz on 3000 rpm).
- Sähkömagneettisen vääntömomentin voimakas riippuvuus (neliöllinen) syöttöjännitteestä (kun jännite muuttuu 2 kertaa, vääntömomentti muuttuu 4 kertaa; DCT:issä vääntömomentti riippuu ensisijaisesti ankkurin syöttöjännitteestä, mikä on edullisempaa) .
Täydellisin tapa poistaa yllä olevat haitat on antaa moottorille virta taajuusmuuttajan kautta, jossa ohjaus tapahtuu monimutkaisten algoritmien mukaan.





