Použití: v domácích a průmyslových elektrických pohonech a napájecích zdrojích. Esence: asynchronní stroj s klecový rotor obsahuje stator s vícefázovým šroubovitým vinutím rozloženým v axiálním směru a rotor s axiálními elektricky vodivými tyčemi a uzavíracími prvky. Uzavírací prvky mohou být ve formě kroužků nebo spirálových tyčí. Stator s vinutím lze podélně-radiálními mezerami rozdělit na dvě nebo více částí, které mohou být v některých případech technologicky vyspělejší. 7 w.p. f-ly, 8 nemocných.
Na druhou stranu je tento typ spouštění extrémně flexibilní, protože lze snadno upravit počet a vzhled křivky představující po sobě jdoucí časy, mechanický nebo elektrický imperativ. Obecně platí, že směr otáčení je invertován změnou toku proudu, což způsobí invertování pole kotvy.
U třífázových motorů s kotvou nakrátko se směr otáčení motoru obrátí, pokud se přepnou kterékoli dvě fáze tří napájecích obvodů. Obvykle jsou tyto investice prováděny se stykači, což způsobuje složitý obvod, který vyžaduje hlubší znalosti a studium elektromotorů, které nespadají pod tuto úroveň.
Vynález se týká asynchronního elektrické stroje a může být použit ve vysokorychlostních domácích a průmyslových elektrických pohonech, stejně jako v elektrárnách s vysokorychlostními pohony.
Známé sběrací stroje různých konstrukcí (1). Poskytují dostatečně vysokou rychlost otáčení jako motory, mají takové významné nevýhody, jako je nízká spolehlivost, nízká technologie, složitost údržby, krátká životnost v důsledku přítomnosti sestavy kartáč-kolektor.
Magnetické pole statoru. Synchronní rychlost je konstantní a závisí na frekvenci napětí elektrické sítě ke kterému je motor připojen a počet pólových párů motoru. Jako v případě třífázové motory, jsou synchronní otáčky všech jednofázových indukčních motorů určeny rovnicí.
Synchronní stroje mohou pracovat jako generátory nebo jako motory. Tento motor se vyznačuje tím, že jeho otáčky jsou přímo úměrné frekvenci sítě. střídavý proud kdo to předkládá. Synchronní motor využívá stejný koncept rotujícího magnetického pole generovaného statorem, ale nyní je rotor tvořen elektromagnety nebo permanentními magnety, které rotují synchronně s polem statoru.
Nejblíže navrženému je asynchronní stroj s rotorem nakrátko obsahujícím feromagnetický stator se štěrbinami a v nich uloženým vícefázové vinutí kotvy, rotor s elektricky vodivými axiálními tyčemi a blokovacími prvky ve formě kroužků (2). Takový stroj jako motor nemá nedostatek sběračů kvůli absenci sběrače a kartáčů, je jednoduchý a spolehlivý. Jeho podstatnou nevýhodou je však fakt, že při napájení ze sítě frekvence f nedokáže zásadně zajistit otáčky n> 60f ot./min a jako generátor - napěťové frekvence f< n/60 Гц, и как следствие этого, имеет ограниченную область применения.
Obsahuje třífázové vinutí střídavého proudu nazývané indukované vinutí a magnetický obvod tvořený naskládáním magnetických plátů. otočná část. Zbytek charakteristik rotoru souvisí s účelem získání pole mezi rotorem a statorem sinusového charakteru a závisí na typu synchronního stroje: stroj s vyčnívajícími póly: rotor je polární expanze, která má za následek proměnná vzduchová mezera, Obsahuje magnetický obvod vytvořený naskládáním magnetických plechů tenčích než stator. která zabraňuje tomu, aby stroj běžel jinou rychlostí, než je synchronizace.
Cílem vynálezu je rozšířit rozsah při zachování jednoduchosti a spolehlivosti.
Tohoto cíle je dosaženo tím, že štěrbiny statoru stroje jsou vyrobeny zkosené po spirálové dráze podél osy stroje a vinutí kotvy a uzavírací tyče rotorových prvků jsou rozmístěny v axiálním směru. uzavírací prvky rotoru jsou umístěny v jeho aktivní povrchové vrstvě. V tomto případě mohou být uzavírací tyče rotorových prvků vytvořeny ve formě prstenců umístěných v prstencových drážkách kolmých k ose stroje. Prvky uzavírající tyče rotoru mohou být navíc vyrobeny také ve formě spirálových tyčí, uložených v drážkách pro ně speciálně vyrobených zkosených po spirálové trajektorii podél osy stroje a galvanicky spojených s axiálními tyčemi v jejich průsečíkech. Vinutí kotvy stroje je složeno ze sekcí, z nichž každá se skládá ze spirálové aktivní části a přímé čelní části a přední části sekcí jsou uloženy v axiální drážce pro ně speciálně vyrobené ve statoru. Vzduchová mezera po obvodu vrtání statoru v oblasti koncových částí vinutí kotvy (axiální drážka statoru) by měla být nerovnoměrná zmenšením radiálního rozměru statoru. Je účelné vytvořit axiální drážku statoru s hloubkou blízkou hodnotě radiální velikosti statoru nebo průchozí v radiálním směru s vytvořením štěrbiny. Stator a vinutí kotvy lze podélnými mezerami rozdělit na dvě nebo více částí, přičemž sekce každé části vinutí kotvy se skládají ze dvou aktivních částí a dvou čelních částí umístěných v naznačených mezerách. Pokud jsou uzavírací prvky rotoru spirálové, měly by být kroky a směry "šroubů" drážek statoru a rotoru se spirálovou trajektorií stejné.
A letové a navigační systémy
Hladký rotační stroj: Budicí vinutí je rozděleno do několika cívek uspořádaných pod různými úhly. synchronního stroje se velmi liší od provozu asynchronního stroje. Permanentní magnety Synchronní motor se používá při požadavku na konstantní otáčky.
Jako motor: v tomto případě je synchronní stroj poháněn na synchronizační otáčky. asynchronní stroj, také známý jako indukční stroj, je střídavý elektrický stroj bez spojení mezi statorem a rotorem. Stroje s bílým rotorem jsou také známé jako separační stroje nebo běžící stroje. Pojem asynchronní pochází ze skutečnosti, že otáčky rotoru těchto strojů nejsou přesně určeny frekvencí proudů procházejících jejich statorem.
Obrázek 1 ukazuje příklad konstrukce stroje; obrázek 2 - příklad rotorového stroje s prstencovými uzavíracími prvky (schematicky); obrázek 3 - příklad rotoru stroje se šroubovitými uzavíracími prvky (schematicky); na Obr. 4 - příklad schématu vinutí kotvy stroje s poměrem n c /f = 120 ot/min Hz; obrázek 5 je obrázek polarity magnetického pole vinutí podle obrázku 4 ve vzduchové mezeře (po obvodu); obrázek 6 je pohled na stroj se statorem rozděleným na dvě části od konce, když je odstraněn štít; obrázek 7 je příklad obvodu vinutí kotvy pro stroj se statorem rozděleným na dvě části a poměrem nc/f = 120 ot/min Hz (kruhové skenování); obrázek 8 je příklad obvodu vinutí kotvy s poměrem nc/f = 240 ot/min Hz.
Synchronní stroj se skládá z rotující části, rotoru a pevné části statoru. Rotor může sestávat z permanentních magnetů nebo se může skládat z vinutí s stejnosměrný proud a magnetický obvod. K vytvoření proudu se využívá vnější síla k otáčení rotoru: jeho rotující magnetické pole indukuje střídavý elektrický proud v cívkách statoru. Rychlost tohoto rotujícího pole se nazývá „rychlost synchronizace“.
Elektrický regulátor otáček
Pohon s proměnnou rychlostí je elektronické zařízení pro řízení rychlosti a točivého momentu střídavého motoru určením požadované frekvence a napětí nebo vstupního proudu. Jejich aplikace sahá od nejmenších po největší motory, jako jsou kompresory. Je však třeba si uvědomit, že zhruba čtvrtinu světové spotřeby elektřiny tvoří elektromotory používané v průmyslu. Pohony s proměnnými otáčkami zůstávají neodpružené a zároveň snižují spotřebu energie.
Asynchronní stroj s rotorem nakrátko obsahuje feromagnetický stator 1 (viz obr. 1) s vícefázovým vinutím kotvy 2 (v příkladu obr. 1 třífázový) a rotor 3. Stator 1 je pevný ve skříni 4 a je vyroben se štěrbinami 5, 6 a 7 podél počtu fází A, B a C vinutí 2. Drážky jsou zkoseny podél spirálové dráhy podél osy stroje. Vrstva zubové drážky statoru je v podstatě vícerozběhová (m je přívod, kde m je počet fází vinutí kotvy) spirálová struktura a fáze A, B a C vinutí 2 , umístěné příslušně ve šroubovicových drážkách 5, 6 a 7, jsou rozmístěny v axiálním směru. Rotor 3 v aktivní povrchové vrstvě má vinutí nakrátko, sestávající z elektricky vodivých axiálních tyčí 8, rozmístěných po obvodu, a uzavírajících tyče 8 prvky 9, rozmístěné v axiálním směru. Když tento uzavírací prvek 9 může být vyroben ve formě kroužků (viz obr. 2), což je technologicky značně pokročilé. Je také možné vyrobit uzavírací prvky 9 ve formě spirálových tyčí (viz obrázek 3), což je konstrukčně složitější a technologicky méně pokročilé, ale poskytuje zlepšený výkon stroje zvýšením vzájemné indukčnosti vinutí statoru a rotoru. Šroubové drážky pro takové uzavírací prvky tvoří ve skutečnosti vícechodou spirálovou strukturu povrchové vrstvy rotoru (v příkladu na obr. 3 - šestistart). Kotevní vinutí 2 stroje je rozmístěno v axiálním směru sekce 10 (viz obrázek 4), vzájemně spojeno obvyklým způsobem. Samotné sekce 10 jsou vlastně polozávity se spirálovitě tvarovanou aktivní částí 11 zkosenou podél šroubovice a rovnou přední částí 12. Přední části 12 jsou umístěny v drážce 13 speciálně pro ně vyrobené (viz obr. 1). Vzhledem k tomu, že axiální čára předních částí vinutí kotvy (osa štěrbiny 13) je hranicí prudké změny polarity pole statoru (viz obr.5), která vede ke vzniku brzdění kroutící moment ve stroji, pak pro zeslabení zadaného momentu je vzduchová mezera v této oblasti nerovnoměrná zmenšením radiální velikosti statoru (viz obrázek 1).
Rychlost otáčení statorového pole
Jak si dokážete představit, současný asynchronní motor se od doby působení těch, kteří se podívali do jejich kolébky, hodně změnil. Ve skutečnosti je jeho původ rozdělen mezi 3 talentované inženýry, z nichž každý sám o sobě přinesl významnou hodnotu pro výrobu svého zařízení, které je nyní velmi populární pro různé účely.
Vděčíme za to zejména principu třífázového při 120°. Nakonec Michail Dolivo-Dobrovolsky spojí oba nápady a vytvoří první třífázový a synchronní motor s rotorem nakrátko, kterému se budeme podrobněji věnovat níže. Právě z této kombinace myšlenek se rodí asynchronní motor, který se dnes objevil ve všech odvětvích a pro spotřebitelské aplikace, ale nebylo předem vyhráno.
Protože přední části 12 vinutí kotvy v rotoru vytvářejí bipolární pole, které také způsobuje brzdný moment ve stroji, je pro zeslabení nebo odstranění tohoto nežádoucího jevu axiální drážka 13 statoru vyrobena s hloubkou blízkou hodnotu k radiální velikosti statoru nebo skrz s vytvořením štěrbiny (viz tečkovaná čára v oblasti drážky 13 na obr. 1). Z hlediska vyrobitelnosti a udržovatelnosti může být vhodné rozdělení statoru 1 a vinutí kotvy 2 podélně-radiální mezery 14 na dvě (obr. 6) nebo více částí. V tomto případě se sekce každé části kotevního vinutí 2 skládají ze dvou aktivních částí 15 a dvou předních částí 16 umístěných v intervalech 14 (viz obr. 6 a 7). V případě provedení uzavíracích prvků 9 rotoru 3 spirálově (viz obrázek 3) pro zajištění max. elektromagnetický moment stroje, je vhodné provést kroky "šroubů" šroubových drážek statoru a rotoru stejně. Promíchávání stroje je účelné s podélně-radiálním uspořádáním plechů. Konstrukce stroje s vnějším statorem a vnitřním rotorem byla popsána výše. Je však také možné provedení s vnitřním statorem a vnějším rotorem, což může být z technologických nebo jiných důvodů výhodnější.
Navzdory své velké snadnosti a nákladům na výrobu a nízkému využití trpí indukční motor některými nevýhodami, které zpomalují jeho vývoj a někdy poskytují výhodu běžné synchronní technologii svých konkurentů. Je napájen stejnosměrným proudem, má malý točivý moment při startování. Za stejných podmínek umí přenášet pouze pevnou sazbu, bez případných změn. Technický pokrok kolem výkonové elektroniky naštěstí vedl k tomu, že pomocí principu proměnlivé frekvence, ale i řízení průtoku si vynutil vysoký kroutící moment i při rozběhu, takže indukční motor se mohl zase s předstihem rozjet.
Vynález je založen na myšlence dosažení vysokých rychlostí otáčení v asynchronním stroji při nízké frekvence ah napájecího napětí (motoru) a naopak nízkonapěťových frekvencí při vysoké frekvence rotace (generátoru) vytvořením axiálního spirálového magnetického pole pohybujícího se v axiálním směru. Axiální pohyb takového pole vzhledem k elementárním obvodům rotoru je ekvivalentní jeho rotaci (viz obr.5). V tomto případě, v závislosti na stoupání "šneku" pole, je jeho axiální posunutí o jeden pólový dílek ekvivalentní jeho otočení o určitý počet otáček. Například posunutí pole o jeden dílek pólu s roztečí „šroubu“ pole rovným dílku pólu je ekvivalentní jeho otočení o jednu otáčku, s krokem 0,5 – o dvě otáčky atd. Protože stoupání „šneku“ pole je určeno pouze stoupáním „šneku“ vinutí kotvy (statorové štěrbiny), - tyto hodnoty jsou navzájem stejné - pak vztah mezi frekvencí napětí f a frekvence otáčení statorového pole (synchronní frekvence otáčení) nc je určena z následující úvahy.
Kvůli pár drobným změnám, protože technicky je jiný jen rotor. Motor bude podporovat stejný počet motorů. Vysokorychlostnímu vlaku nakonec prospěje jasné zvýšení účinnosti a mírné zvýšení výkonu z 800kW na 280kW.
Stejně jako jeho bratranec synchronního motoru se stator skládá z cívek, typicky 3, které, střídavě křižované proudem, budou indukovat rotující magnetické pole. Rotor je tvořen tuhými hliníkovými nebo měděnými vodiči namontovanými v krátkém a kostkovaném vzoru, odtud přezdívka „rotor s veverkou“.
Pohyb pole statoru se stoupáním "šneku" t B1 = na pólový dílek odpovídá (ekvivalentně) rotaci pole o jednu otáčku a času 1/2f c = 1/20 f min. Vezmeme-li v úvahu nepřímo úměrnou závislost rotace pole na relativním stoupání "šneku" pole (štěrbiny) statoru t B1 / znázorněno výše, je frekvence rotace pole (synchronní frekvence otáčení) určena následovně: n c =120f/t B1 =120fn B1 ot/min, kde n B1 =/t B1 je počet závitů statorové drážky na pól.
Pokud se hliníkový rotor lisuje ve slévárně, byla slitina mědi donedávna z technických důvodů ofsetována. Nyní se pro zvýšení produktivity vyrábějí také v průmyslu. Rotující magnetické pole statoru způsobí indukované pole v rotoru. Kromě toho se termíny „kotva motoru“ a „rotor motoru“ používají ekvivalentním způsobem, přičemž druhé magnetické pole má tendenci odpovídat indikátoru statoru, ale nedokáže jej zachytit: jedná se o prokluz.
Strategický výběr výrobců
Otáčky rotoru jsou tedy vždy o něco menší než synchronizace při běhu ve statoru. Právě tato situace dala asynchronnímu motoru jméno. Výroba indukčního motoru je pravděpodobně nejekonomičtější. Je to také ten, jehož průmyslová hodnota je nejstabilnější. Protože v rotoru nejsou žádné magnety, které jsou vyrobeny z magnetických železných plechů a hliníku a méně často z mědi.
V uvažovaném příkladu, kde n B1 =/t B1 = 1, při frekvenci f = 50 Hz n c = = 6000 ot/min, což nebylo možné zajistit u asynchronního stroje. Změnou n B1 je možné dosáhnout libovolných poměrů n c /f.
Je třeba poznamenat, že z hlediska fyzikálních procesů se provoz stroje ve všech režimech (motor, generátor, brzda) neliší od provozu běžného asynchronního stroje, kde se rotor otáčí s určitým skluzem vzhledem k rotujícímu statoru. pole.
Provozní režimy asynchronního stroje
Se silným nárůstem poptávky po některých suroviny, které tvoří nejvýkonnější magnety, je jednoznačnou výhodou cenové stability – tyto „vzácné zeminy“ se ve skutečnosti velmi špatně pojmenovávají. „Země“ je historická, sama je již špatně adaptovaná. Jde vlastně o minerály, které jsou na Zemi poměrně rozšířené.
Co je opravdu problematické a vysvětluje cenu těchto prvků je, že jejich množství je velmi nízké kvůli zálohě. Stručně řečeno, na naší modré planetě je jich mnoho, ale všudypřítomných v malých žilkách, takže jejich využívání je velmi drahé.
Díky své jednoduchosti a spolehlivosti, stejně jako možnosti teoreticky získat libovolné vysoké otáčky při nízkých frekvencích sítě a napětí jakýchkoli nízkých frekvencí při vysokých otáčkách, může navrhovaný stroj jako motor nalézt široké uplatnění v domácím elektrickém pohonu (mixéry, mlýnky na kávu, vysoušeče vlasů atd.) namísto nespolehlivých kolektorových motorů, stejně jako ve středních a velkých průmyslových vysokootáčkových elektrických pohonech (mlátičky, odstředivky atd.), kde mohou být frekvenční měniče vyloučeno, a jako generátor - v elektrárnách s vysokorychlostním (turbinovým) pohonem, kde lze vyloučit reduktory.
Obr.2. klecový rotor
Jejich využití z nich navíc udělalo geostrategické zdroje, které se každý snaží získat v zemích, z nichž některé nemají stabilní demokratický režim. To je důvod, proč výrobci motorů stále více hledají omezení nebo dokonce upuštění od těchto takzvaných vzácných půd.
Indukční motor nepoužívá magnety, takže je imunní vůči problémům vzácných zemin a může tvrdit, že je nejlevnější na výrobu celé rodiny elektrických jednotek. Existují však i analogy. Protože pokud samotný motor není drahý, pak totéž nelze říci o elektronice potřebné pro řízení změn otáček. Tento nezbytný materiál, kromě použití v třífázových pevných otáčkách, celosvětově ztrácí finanční výhodu asynchronního řešení.
1. ASYNCHRONNÍ STROJ S KRÁTCE UZAVŘENÝM ROTOREM, obsahující stator s feromagnetickým jádrem s válcovou aktivní povrchovou vrstvou s drážkami a v nich uloženým vícefázovým vinutím a rotorem soustředným se statorem s feromagnetickým jádrem a elektricky vodivým axiální tyče ve své aktivní povrchové vrstvě a uzavírací prvky tyčí, vyznačující se tím, že za účelem rozšíření záběru poskytnutím daného poměru rychlosti otáčení k frekvenci napětí při zachování jednoduchosti a spolehlivosti jsou drážky statoru vyrobeny zkosené podél spirálovou dráhu podél osy stroje a vinutí statoru a uzavírací tyče rotorových prvků jsou rozmístěny v axiálním směru a uzavírací prvky rotoru jsou umístěny v jeho aktivní povrchové vrstvě.
V elektromobilu se nedá sklouznout. Poté, co pracujete nenápadně, tento designový design vykazuje úžasný výkon po více než století. Pokud je schopen zatáčet vysokou rychlostí, může nyní poskytnout velmi důležitý točivý moment hned od začátku, takže je ideální pro elektrický pohon.
Na druhou stranu se tepelný motor nikdy nebude moci vyrovnat s rostoucími výrobními náklady, Údržba a spotřeba, která se velmi zřetelně projeví v jeho neprospěch. Zvláštnost indukční motor roadster? Celý jeho design byl zaměřen na dosažení maximálního výkonu a efektivity. Ojnice rotoru jsou tedy vyrobeny z mědi. Není to převratné, až na to, že zde byla měď tlakově litá ve slévárně přímo na rotor.
2. Stroj podle nároku 1, vyznačující se tím, že uzavírací tyče rotorových prvků jsou vytvořeny ve formě prstenců umístěných v prstencových drážkách vytvořených v jádru kolmo k ose stroje.
3. Stroj podle nároku 1, vyznačující se tím, že uzavírací tyče rotorových prvků jsou vytvořeny ve formě spirálových tyčí uložených v drážkách vytvořených šikmo podél spirálové dráhy podél osy stroje a jsou galvanicky spojeny s osou stroje. tyče v místech, kde se s nimi kříží.
Konstrukce asynchronních strojů s rotorem nakrátko
To je aktuální hodnota z hlediska kvality produktu. Plechy složené do tvaru statoru a rotoru jsou výjimečně tenké a početnější, aby se snížily ztráty vířivými proudy. způsobené magnetickými poli povedou ke ztrátám energie, pokud je sestava vyrobena z jednoho bloku železa.
Rozumíme nejlepšímu výkonu a výkonu konvenčního trakčního řetězu tohoto roadsteru. S neustálým každoročním pokrokem je nyní účinnost indukčního motoru asi 88 %, když nejlepší sportovní vozy s nejmodernějšími spalovacími motory dosahují sotva 30 %.
4. Stroj podle nároků 1 až 3, vyznačující se tím, že statorové vinutí je vytvořeno ze sekcí, z nichž každá sestává ze šroubovité aktivní části a přímé čelní části, přičemž přední části sekcí jsou uloženy v axiální drážce. vyrobeno ve statoru.
5. Stroj podle nároků 1 až 4, vyznačující se tím, že vzduchová mezera po obvodu vrtání statoru v oblasti čelních částí statorového vinutí je vytvořena nerovnoměrná zmenšením radiální velikosti statoru.
6. Stroj podle nároků 1 až 5, vyznačující se tím, že axiální drážka statoru je vytvořena s hloubkou blízkou hodnotě radiální velikosti statoru nebo průchozí v radiálním směru s vytvořením štěrbiny.
Konstrukční formy provedení elektrických strojů.
Základní informace o sériových asynchronních motorech.
Provozní režimy asynchronního stroje.
Princip činnosti asynchronního stroje.
Zařízení asynchronního stroje.
Přednáška č. 2
Navigační systémy
Irkutská pobočka MSTU GA
Irkutsk, 2007
Asynchronní elektrické stroje
Elektrická auta
PŘEDNÁŠKA #9
A LETOVÉ A NAVIGAČNÍ SYSTÉMY
KATEDRA LETECKÝCH ELEKTRICKÝCH SYSTÉMŮ
POBOČKA IRKUTSK
CIVILNÍ LETECTVÍ
MOSKVA STÁTNÍ TECHNICKÁ UNIVERZITA
disciplínou
pro studenty specializace 160903
Židle Elektrické systémy letectví a řízení letu
SCHVALOVAT
Vedoucí odboru jaderné elektrárny a PNK
Kandidát technických věd, docent Mishin S.V.
« 14 » Martha 2008 G.
Podle disciplíny: Elektrická auta
Téma přednášky: Asynchronní elektrické stroje (2 hodiny)
LITERATURA
1. Kopylov B.V. Elektrická auta. M., 1988
VIZUÁLNÍ POMŮCKY, APLIKACE, TCO
1. Instalace multimédií
Projednáno na poradě odd
« 14 » Martha 2008 město, protokol čís. 8/07
Asynchronní stroj se skládá ze dvou hlavních částí oddělených vzduchovou mezerou: stacionárního statoru a rotujícího rotoru. Každá z těchto částí má jádro a vinutí. V tomto případě je vinutí statoru připojeno k síti a je jakoby primární a vinutí rotoru je sekundární, protože do něj vstupuje energie z vinutí statoru v důsledku magnetického spojení mezi těmito vinutími.
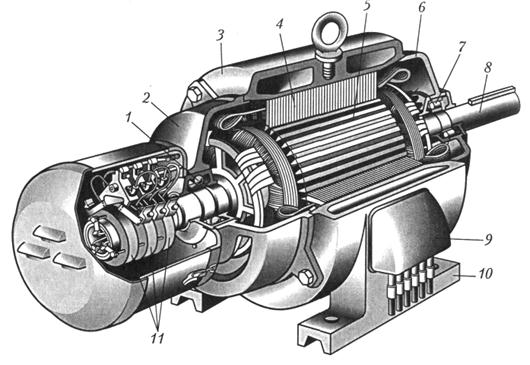
Podle konstrukce se asynchronní motory dělí na dva typy: motory s rotorem nakrátko a motory s fázovým rotorem. Uvažujme zařízení třífázového asynchronního motoru s rotorem nakrátko (obr. 1). Motory tohoto typu jsou nejpoužívanější.
Obr. 1. Zařízení třífázového asynchronního motoru s rotorem nakrátko:
1, 11 - ložiska; 2 - hřídel; 3, 9 - ložiskové štíty; 4 - svorkovnice; 5 - jádro rotoru s vinutím nakrátko; 6 - jádro statoru s vinutím; 7 - tělo; 8 - vinutí statoru; 10 - ventilátor; 12 - plášť ventilátoru; 13 - vnější žebrovaný povrch těla; 14 - tlapky; 15 - zemnící šroub
Stacionární část motoru - stator - sestává ze skříně 7 a jádra 6 s třífázové vinutí 8. Skříň motoru je odlita z hliníkové slitiny nebo litiny, případně svařena. Uvažovaný motor má uzavřenou foukanou konstrukci. Proto má povrch jeho těla řadu podélných žeber, jejichž účelem je zvětšit chladicí plochu motoru.
Ve skříni je jádro statoru 6, které má laminovanou strukturu: lisované plechy z tenkého plechu elektrotechnické oceli o tloušťce obvykle 0,5 mm jsou pokryty vrstvou izolačního laku, sestaveny do obalu a upevněny speciálními držáky nebo podélníky svary podél vnějšího povrchu obalu. Tato konstrukce jádra přispívá k výraznému snížení vířivých proudů, které vznikají při remagnetizaci jádra rotujícím magnetické pole. Na vnitřní ploše jádra statoru jsou podélné drážky, ve kterých jsou umístěny štěrbinové části vinutí statoru, spojené v určitém pořadí předními částmi umístěnými vně jádra na jeho koncových stranách.
Ve vývrtu statoru je rotační část motoru - rotor, skládající se z hřídele 2 a jádra 5 s vinutím nakrátko. Takové vinutí, nazývané "veverčí kolo", je řada kovových (hliníkových nebo měděných) tyčí umístěných v drážkách jádra rotoru, uzavřených na obou stranách zkratovacími kroužky (obr. 2, a). Jádro rotoru má rovněž laminovanou strukturu, ale plechy rotoru nejsou potaženy izolačním lakem, ale mají na svém povrchu tenký oxidový film. To je dostatečná izolace pro omezení vířivých proudů, protože jejich velikost je malá kvůli nízké frekvenci obrácení magnetizace jádra rotoru. Například při síťové frekvenci 50 Hz a jmenovitém skluzu 6 % je remagnetizační frekvence jádra rotoru 3 Hz.
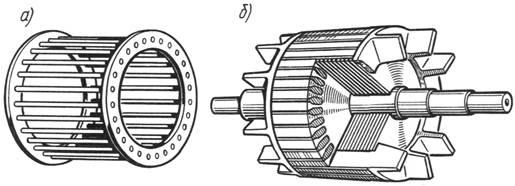
Obr.2. Rotor s veverkou:
a - navíjecí "klec pro veverky"; b - rotor s vinutím vyrobeným vstřikováním;
Vinutí rotoru s kotvou nakrátko se u většiny motorů provádí odléváním sestaveného jádra rotoru roztavenou hliníkovou slitinou. Současně s navíjecími tyčemi jsou odlévány zkratovací kroužky a ventilační lopatky (obr. 2, b).
Hřídel rotoru se otáčí ve valivých ložiskách 1 a 11 umístěných v ložiskových štítech 3 a 9.
Motor je chlazen ofukováním vnějšího žebrovaného povrchu skříně 13. Proud vzduchu je vytvářen radiálním ventilátorem 10 krytým skříní 12. Na koncové ploše této skříně jsou otvory pro nasávání vzduchu. Motory o výkonu 15 kW a více kromě uzavřeného dělají i chráněné provedení s vnitřní vlastní ventilací. V ložiskových štítech těchto motorů jsou otvory (žaluzie), kterými je pomocí ventilátoru hnán vzduch vnitřní dutinou motoru. Vzduch v tomto případě „omývá“ zahřáté části (vinutí, jádra) motoru a chlazení je účinnější než při externím ofukování.
Konce fázových vinutí jsou vyvedeny na svorky svorkovnice 4. Typicky jsou asynchronní motory navrženy tak, aby byly začleněny do třífázová síť pro dvě různá napětí, která se liší faktorem. Například motor je určen k připojení k síti pro napětí 380/660 V. Pokud je síť síťové napětí 660 V, pak by mělo být vinutí statoru spojeno s hvězdou, a pokud 380 V, pak s trojúhelníkem. V obou případech bude napětí na vinutí každé fáze 380 V. Závěry fázových vinutí jsou umístěny na panelu tak, aby bylo vhodné propojit fázová vinutí pomocí propojek, aniž by došlo k jejich křížení. (obr. 3). U některých motorů s nízkým výkonem jsou ve svorkovnici pouze tři svorky. V tomto případě lze motor připojit k síti na jedno napětí (spojení statorového vinutí takového motoru s hvězdou nebo trojúhelníkem je provedeno uvnitř motoru).

Obr.3. Umístění svorek vinutí statoru (a) a poloha propojek
při spojení vinutí statoru s hvězdou a trojúhelníkem (b)
Motor se montuje v místě jeho instalace buď pomocí nohou 14 (viz obr. 1) nebo pomocí příruby. V druhém případě je na ložiskovém štítu (obvykle na straně vyčnívajícího konce hřídele) vyrobena příruba s otvory pro upevnění motoru na pracovní stroj. K ochraně obsluhujícího personálu před možným zraněním elektrický šok motory jsou dodávány se zemnicími šrouby 15 (nejméně dvěma). Kruhový diagram zapojení asynchronního motoru s rotorem nakrátko do třífázové sítě je znázorněno na obr. 4,a.
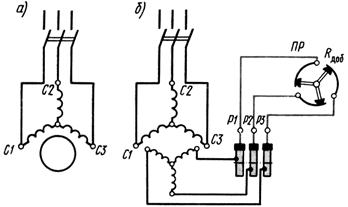
Obr.4. Schémata zapojení třífázových asynchronních motorů s rotorem nakrátko (a) a fázovým (b)
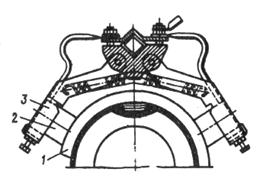
Další typ třífázových asynchronních motorů - motory s fázovým rotorem - se od uvažovaného motoru konstrukčně liší především rotorovým zařízením (obr. 5). Stator tohoto motoru se také skládá z pouzdra 3 a jádra 4 s třífázovým vinutím. Má ložiskové štíty 2 a 6 s valivými ložisky 1 a 7. Na tělese 3 jsou připevněny patky 10 a svorkovnice 9. Rotor má však složitější konstrukci. Na hřídeli 8 je podobně jako u statorového vinutí upevněno vrstvené jádro 5 s třífázovým vinutím. Toto vinutí je spojeno hvězdou a jeho konce jsou spojeny se třemi sběracími kroužky 11 umístěnými na hřídeli a izolovanými od sebe a od hřídele. Pro vytvoření elektrického kontaktu s vinutím rotujícího rotoru má každý sběrací kroužek 1 (obr. 6) obvykle dva kartáče 2 umístěné v držácích kartáčů 3. Každý držák kartáčů je vybaven pružinami, které zajišťují přitlačení kartáčů ke sběracímu kroužku s určitou silou.
Indukční motory s fázovým rotorem jsou složitější a méně spolehlivé, ale mají lepší ovládací a rozběhové vlastnosti než motory s rotorem nakrátko. Schéma zapojení asynchronního motoru s fázovým rotorem do třífázové sítě je znázorněno na obr. 4b. Vinutí rotoru tohoto motoru je spojeno se spouštěcím reostatem ATD , což vytváří dodatečný odpor v obvodu rotoru R ext .
Na těle asynchronního motoru je připevněn štítek, na kterém je uveden typ motoru, výrobce, rok výroby a jmenovité údaje (čistý výkon, napětí, proud, účiník, otáčky a účinnost).
Obr.5. Zařízení třífázového asynchronního motoru s fázovým rotorem:
1, 7 - ložiska; 2, 6 - ložiskové štíty; 3 - tělo; 4 - jádro statoru s vinutím; 5 – jádro rotoru; 8 - hřídel; 9 - svorkovnice; 10 - tlapky; 11 - kontaktní kroužky