ด้วยกำลังตั้งแต่หลายสิบวัตต์จนถึงหลายกิโลวัตต์ จึงใช้กันอย่างแพร่หลายในเครื่องใช้ในครัวเรือนต่างๆ พัดลมไดรฟ์สำหรับใช้ในบ้านและในโรงงานอุตสาหกรรม เครื่องจักรงานไม้ ปั๊ม คอมเพรสเซอร์ สายพานลำเลียง และเครื่องจักรขนาดเล็ก ข้อได้เปรียบของพวกเขาคือความเป็นไปได้ในการใช้ในสถานที่และห้องที่ไม่มี เครือข่ายสามเฟสแต่เชื่อมต่อเครือข่ายเฟสเดียวแบบสองสาย
ส่วนสำคัญของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสเฟสเดียวผลิตขึ้นโดยใช้มอเตอร์สามเฟสแบบอนุกรม ตัวอย่างเช่น มอเตอร์แบบเฟสเดียวของซีรีส์ ABE ผลิตขึ้นโดยใช้มอเตอร์สามเฟสในตัว AB เป็นต้น ไม่มีความแตกต่างอย่างมีนัยสำคัญในการออกแบบชิ้นส่วนทางกลและวงจรแม่เหล็กของมอเตอร์ดังกล่าวเมื่อเปรียบเทียบกับ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสของกระแสสามเฟส .
ตัวเก็บประจุเอล เครื่องยนต์
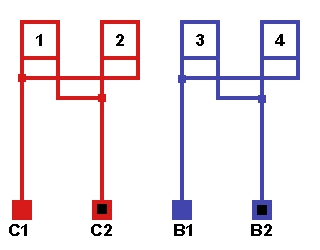
ความแตกต่างที่สำคัญคือการออกแบบ การดำเนินการ และการเชื่อมต่อของขดลวดสเตเตอร์ ในการสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสแบบเฟสเดียวมักใช้ขดลวดสตาร์ทแบบพิเศษซึ่งอยู่บนสเตเตอร์พร้อมกับขดลวดทำงานหลัก แต่ขยับในมุมหนึ่งเมื่อเทียบกับมัน เริ่มคดเคี้ยวมักจะเชื่อมต่อกับเครือข่ายผ่าน ตัวเก็บประจุและหลังจากสตาร์ทและเร่งเครื่องยนต์แล้วเครื่องยนต์ก็จะดับลง ในการออกแบบหลาย ๆ ขดลวดทั้งสองนั้นใช้งานได้และเพื่อเพิ่มประสิทธิภาพในการใช้งานและปรับปรุงคุณสมบัติของมอเตอร์แบบเฟสเดียวคุณสามารถปล่อยให้ขดลวดสตาร์ทด้วยตัวเก็บประจุที่รวมอยู่ในวงจรที่เชื่อมต่อกับเครือข่ายตลอดระยะเวลา ของการดำเนินงาน ในกรณีนี้โดยการเลือกความจุของตัวเก็บประจุในโหมดการทำงานของเครื่องจะหมุนเป็นวงกลมหรือเกือบเป็นวงกลม สนามแม่เหล็กเมื่อองค์ประกอบผกผันของสนามจะหายไปอย่างสมบูรณ์หรือจะอ่อนแอลงอย่างมาก ส่งผลให้ประสิทธิภาพของเครื่องดีขึ้นและประสิทธิภาพในการใช้งานจะเพิ่มขึ้น ถ้าอยู่ที่ทำงาน มอเตอร์เฟสเดียวขดลวดทั้งสองยังคงเชื่อมต่อกับเครือข่ายอย่างถาวรและตัวเก็บประจุเชื่อมต่อแบบอนุกรมกับหนึ่งในนั้นจากนั้นจึงเรียกเครื่องยนต์ดังกล่าว คอนเดนเซอร์(ดูรูป)
ในมอเตอร์คาปาซิเตอร์ ขดลวดทั้งสองทำงานจากเงื่อนไขเพื่อให้ได้สนามวงกลมของจำนวนรอบใน กรณีทั่วไปแตกต่าง. การเลือกตัวเก็บประจุอาจดูเหมือนเป็นงานที่น่ากลัว มีอย่างน้อยสองวิธีในการทำเช่นนี้
วิธีแรกคือการเลือกความจุของตัวเก็บประจุเชิงประจักษ์เกณฑ์สำหรับการประเมินทางเลือกที่เหมาะสมที่สุดของความจุกระแสไฟที่ไม่มีโหลดและแรงบิดเริ่มต้น แรงบิดควรสูงสุดและกระแสไม่โหลดควรน้อยที่สุด โดยปกติ ค่าประมาณสำหรับกระแสไม่โหลดก็เพียงพอแล้ว
วิธีที่สองในการเลือกความจุของตัวเก็บประจุคือวิธีการคำนวณมาดูรายละเอียดเพิ่มเติมกันดีกว่า ในกรณีนี้ แรงดันไฟฟ้าบนขดลวดจะต้องเปลี่ยนเฟสเป็น 90o ดังนั้น
 jUa = Uβkwawa/kwβwβ. (1)
jUa = Uβkwawa/kwβwβ. (1)
กระแสน้ำที่คดเคี้ยว เอียและ Iβจะอยู่นอกเฟส 90° และจะสร้าง MDS
jIakwawa = ไอบีตาเควเบต้า (2),
ที่ไหน วาและ wβ- จำนวนรอบที่คดเคี้ยว α และ β ;
ควาและ kwβค่าสัมประสิทธิ์การพันของขดลวด α และ β .
คูณด้านซ้ายและขวาของความเท่าเทียมกัน (1) และ (2) เราได้รับ
UαIα = UβIβ
นั่นคือกำลังรวมของขดลวดทั้งสองจะเท่ากัน เนื่องจากขดลวดอยู่ในสภาวะเดียวกันกับโรเตอร์ พลังงานเชิงรุกที่พัฒนาขึ้นโดยขดลวดเหล่านี้จึงเท่ากัน กล่าวคือ
UαIαcosφα = UβIβcosφβ
เหตุฉะนั้น φα = φβ .
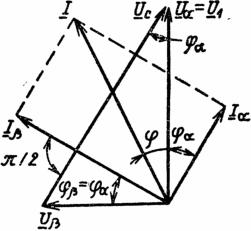
นอกจากนี้ ตามรูปที่
Uα = U1 Uβ+Uс = U1
และมุมเปลี่ยนระหว่างกระแส Iβและแรงดันตกคร่อมตัวเก็บประจุ เราคือ 90° เงื่อนไขเหล่านี้สอดคล้องกับไดอะแกรมเวกเตอร์ ตามแผนภาพนี้
เรา = Uβ /sinφβ
ความจุที่จำเป็นในการสร้างสนามวงกลมถูกกำหนดจากความสัมพันธ์
Iβ = เรา /xc = (Uβ / sinφβ) ωC
ที่ไหน
C = Iβ sinφβ / (ωUβ)
กำลังของตัวเก็บประจุคือ
QC = เรา Iβ = Uβ Iβ / sinφβ
ดังนั้นกำลังของตัวเก็บประจุจึงเท่ากับกำลังสูงสุดของเครื่องยนต์ นั่นคือ ค่อนข้างใหญ่ ควรสังเกตว่าสำหรับค่าความจุที่กำหนด คสนามวงกลมถูกสร้างขึ้นที่โหลดมอเตอร์เฉพาะ (ที่ค่าปัจจุบันหนึ่งค่า) ที่โหลดอื่นๆ สนามจะเป็นวงรีและประสิทธิภาพของมอเตอร์ลดลง คุณสามารถปรับความจุด้วยการเปลี่ยนแปลงของโหลด แต่จะทำให้วงจรมอเตอร์ซับซ้อน เพื่อให้ได้สนามวงกลมเมื่อเริ่มต้นและเมื่อโหลดใด ๆ บางครั้งตัวเก็บประจุจะรวมอยู่ในสองกิ่งขนาน ภายใต้ภาระงาน หนึ่งสาขาทำงาน และเมื่อเริ่มต้น ทั้งสองจะเปิดทำงาน ที่ มอเตอร์ตัวเก็บประจุการใช้วัสดุเกือบจะเหมือนกับของ มอเตอร์สามเฟสพลังที่เท่ากัน ประสิทธิภาพก็เท่ากันโดยประมาณ และ cosφสูงขึ้นเล็กน้อยสำหรับมอเตอร์ตัวเก็บประจุ
สำหรับมอเตอร์แบบอะซิงโครนัสแบบเฟสเดียวจำนวนมาก ตัวเก็บประจุเพิ่มเติม (สตาร์ท) จะเชื่อมต่อกับวงจรขดลวดที่เชื่อมต่อกับเครือข่ายผ่านตัวเก็บประจุในช่วงเริ่มต้น
หลักการทำงานและการออกแบบ มอเตอร์ไฟฟ้าเฟสเดียว.
สเตเตอร์แบบเฟสเดียวมาตรฐานมีขดลวดสองเส้นที่ 90° ต่อกัน หนึ่งในนั้นถือเป็นขดลวดหลักอีกอันหนึ่ง - ตัวเสริมหรือสตาร์ท ตามจำนวนเสา ขดลวดแต่ละอันสามารถแบ่งออกเป็นหลายส่วน
รูปแสดงตัวอย่างสองขั้ว ขดลวดเฟสเดียวมีสี่ส่วนในขดลวดหลักและสองส่วนในเครื่องช่วย
ข้อจำกัดของมอเตอร์ไฟฟ้าแบบเฟสเดียว
จาก ควรจำไว้ว่าการใช้มอเตอร์ไฟฟ้าแบบเฟสเดียวเป็นการประนีประนอมอยู่เสมอการออกแบบเครื่องยนต์อย่างใดอย่างหนึ่งขึ้นอยู่กับงานที่ทำก่อน ซึ่งหมายความว่ามอเตอร์ไฟฟ้าทั้งหมดได้รับการออกแบบตามสิ่งที่สำคัญที่สุดในแต่ละกรณี เช่น ประสิทธิภาพ แรงบิด รอบการทำงาน เป็นต้น เนื่องจากสนามเต้นเป็นจังหวะ มอเตอร์แบบเฟสเดียวจึงสามารถมีได้มากกว่า ระดับสูงเสียงรบกวนเมื่อเทียบกับมอเตอร์สองเฟสซึ่งเงียบกว่ามากเพราะใช้ตัวเก็บประจุเริ่มต้น ตัวเก็บประจุซึ่งสตาร์ทมอเตอร์ไฟฟ้าช่วยให้การทำงานราบรื่น
ต่างจากแบบสามเฟสตรงที่มีข้อจำกัดบางประการสำหรับมอเตอร์ไฟฟ้าแบบเฟสเดียว ไม่ว่าในกรณีใด มอเตอร์ไฟฟ้าแบบเฟสเดียวควรทำงานในโหมดเดินเบา เนื่องจากจะร้อนมากที่โหลดต่ำ จึงไม่แนะนำให้ใช้มอเตอร์ไฟฟ้าที่โหลดน้อยกว่า 25% ของโหลดเต็ม
อีเมลแบบอะซิงโครนัส มอเตอร์เสาแรเงา
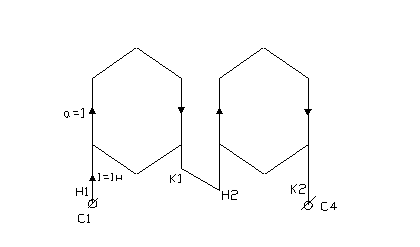
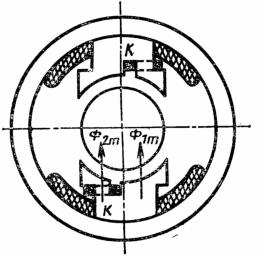 สเตเตอร์ มอเตอร์เหนี่ยวนำมีเสาป้องกันมีการออกแบบเสาเด่น (ดูรูป) ขดลวดเฟสเดียววางอยู่บนเสาซึ่งเชื่อมต่อใน เครือข่ายเฟสเดียว. ส่วนหนึ่งของขั้วครอบคลุมขดลวดลัดวงจร K โรเตอร์ของมอเตอร์มีขดลวดลัดวงจรแบบธรรมดาในรูปของกรงกระรอก
สเตเตอร์ มอเตอร์เหนี่ยวนำมีเสาป้องกันมีการออกแบบเสาเด่น (ดูรูป) ขดลวดเฟสเดียววางอยู่บนเสาซึ่งเชื่อมต่อใน เครือข่ายเฟสเดียว. ส่วนหนึ่งของขั้วครอบคลุมขดลวดลัดวงจร K โรเตอร์ของมอเตอร์มีขดลวดลัดวงจรแบบธรรมดาในรูปของกรงกระรอก
ฟลักซ์แม่เหล็กของขั้วมอเตอร์หนึ่งขั้วสามารถแสดงเป็นสององค์ประกอบได้ ส่วนของขั้วที่ไม่หุ้มด้วยขดลวดลัดวงจรทะลุกระแส Ф1mสร้างขึ้นโดยกระแสขดลวดสเตเตอร์ I1. ส่วนอื่น ๆ ของเสาถือได้ว่าเป็นหม้อแปลงไฟฟ้าซึ่ง ขดลวดปฐมภูมิคือขดลวดสเตเตอร์และขดลวดทุติยภูมิคือขดลวดลัดวงจร การไหลที่เกิดขึ้นของส่วนนี้ของเสา Ф2m เท่ากับผลรวมทางเรขาคณิตของการไหล ฉ"2mเกิดจากกระแสขดลวดสเตเตอร์ I1, และไหล Фк,m จากกระแส อิกเหนี่ยวนำให้เกิดในขดลวดลัดวงจรโดยฟลักซ์ ฉ"2m.
 ดังต่อไปนี้จากแผนภาพเวกเตอร์ (ดูรูป) ซึ่งคล้ายกับแผนภาพเวกเตอร์ของหม้อแปลงไฟฟ้าระหว่างกระแสของสองส่วนของขั้ว Ф1mและ Ф2mเนื่องจากการกระทำของการป้องกันของขดลวดลัดวงจร มีการเลื่อนเฟสในเวลาตามมุม β
. นอกจากนี้ แกนของกระแสเหล่านี้จะถูกแทนที่ด้วยมุมหนึ่งในอวกาศ ดังนั้นสนามแม่เหล็กในเครื่องจะหมุน เนื่องจากฟลักซ์แม่เหล็ก Ф1mและ Ф2mไม่เท่ากันและมุมเปลี่ยนระหว่างทั้งสองน้อยกว่า 90° จากนั้นสนามแม่เหล็กจะเป็นวงรี เป็นผลให้มอเตอร์ที่มีเสาป้องกันมีข้อเสียหลายประการ: ขนาดโดยรวมที่ใหญ่, แรงบิดเริ่มต้นขนาดเล็ก
, ตัวประกอบกำลังต่ำ (คอส φ 0.4 ÷ 0.6)และประสิทธิภาพต่ำเนื่องจากการสูญเสียขนาดใหญ่ในขดลวดลัดวงจร (ή ≈ 0.25 ÷ 0.4).
ดังต่อไปนี้จากแผนภาพเวกเตอร์ (ดูรูป) ซึ่งคล้ายกับแผนภาพเวกเตอร์ของหม้อแปลงไฟฟ้าระหว่างกระแสของสองส่วนของขั้ว Ф1mและ Ф2mเนื่องจากการกระทำของการป้องกันของขดลวดลัดวงจร มีการเลื่อนเฟสในเวลาตามมุม β
. นอกจากนี้ แกนของกระแสเหล่านี้จะถูกแทนที่ด้วยมุมหนึ่งในอวกาศ ดังนั้นสนามแม่เหล็กในเครื่องจะหมุน เนื่องจากฟลักซ์แม่เหล็ก Ф1mและ Ф2mไม่เท่ากันและมุมเปลี่ยนระหว่างทั้งสองน้อยกว่า 90° จากนั้นสนามแม่เหล็กจะเป็นวงรี เป็นผลให้มอเตอร์ที่มีเสาป้องกันมีข้อเสียหลายประการ: ขนาดโดยรวมที่ใหญ่, แรงบิดเริ่มต้นขนาดเล็ก
, ตัวประกอบกำลังต่ำ (คอส φ 0.4 ÷ 0.6)และประสิทธิภาพต่ำเนื่องจากการสูญเสียขนาดใหญ่ในขดลวดลัดวงจร (ή ≈ 0.25 ÷ 0.4).
การปรับปรุงคุณสมบัติการเริ่มต้นและการทำงานบางอย่างสามารถทำได้โดยใช้การปัดด้วยแม่เหล็กของเหล็กแผ่นระหว่างเสา เพิ่มช่องว่างอากาศใต้ส่วนที่ไม่มีฉนวนหุ้มของเสา และวางการลัดวงจรสองหรือสามรอบที่มีความกว้างต่างกันในแต่ละเสา มอเตอร์ที่มีขั้วป้องกันมีจำหน่ายในเชิงพาณิชย์ตั้งแต่เศษส่วนของวัตต์ถึง 300 W และใช้ในพัดลม เครื่องเล่น เครื่องบันทึกเทป ฯลฯ
สูตรการแปลงมอเตอร์ไฟฟ้าสามเฟสเป็นตัวเก็บประจุแบบเฟสเดียว

- ด้วยการคำนวณใหม่ของมอเตอร์ไฟฟ้าสามเฟสเป็นเฟสเดียว จำนวนของกิ่งขนานจะไม่ถูกนำมาพิจารณาด้วย ดังนั้นจำนวนกิ่งขนานในการทำงานและขดลวดเริ่มต้นจะเท่ากับจำนวนขนาน กิ่งก้านในขดลวดของมอเตอร์ไฟฟ้าสามเฟส
ตัวอย่างการแปลงมอเตอร์ไฟฟ้าสามเฟสเป็นตัวเก็บประจุแบบเฟสเดียว
- ตัวอย่างเช่น การแปลงตัวเก็บประจุแบบสามเฟสเป็นตัวเก็บประจุแบบเฟสเดียว ลองใช้เครื่องยนต์ 5AI100S2U3 ที่มีกำลัง 4.0 กิโลวัตต์ 3000 รอบต่อนาที แรงดันไฟ U=220/380 กระแส A=14.6/8.15 มอเตอร์ไฟฟ้ามีข้อมูลการม้วนดังนี้: เส้นผ่านศูนย์กลางของเส้นลวด d=0.8×2 (ในสองสาย), หมุนในช่อง n=25, จำนวนกิ่งขนาน a=1, ระยะพิทช์ที่คดเคี้ยวตามช่อง y=11;9, จำนวน ของช่องสเตเตอร์ Z 1 =24
- ก่อนอื่นคุณต้องคำนวณรูปแบบการวางของขดลวดเฟสเดียวสำหรับมอเตอร์ตัวเก็บประจุแบบเฟสเดียวจะดีกว่าที่จะเลือกรูปแบบการวางที่คดเคี้ยวทำงานตรงบริเวณ 2/3 ของร่องของแกนสเตเตอร์และการเริ่มต้น ขดลวดตรงบริเวณ 1/3 ของร่องของแกนสเตเตอร์รูปที่ 1 ขั้นตอน: การทำงานที่คดเคี้ยว y=11;9;7;5 เริ่มการม้วน y=11;9
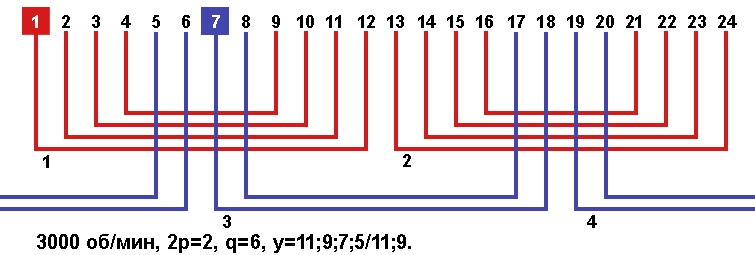

- การคำนวณใหม่ของมอเตอร์ไฟฟ้าสามเฟสเป็นมอเตอร์ตัวเก็บประจุแบบเฟสเดียวเสร็จสมบูรณ์ มันกลายเป็นมอเตอร์ไฟฟ้าแบบเฟสเดียวที่มีข้อมูลการพันดังต่อไปนี้: การทำงานที่คดเคี้ยว - จำนวนรอบในร่อง Nr=13, เส้นผ่านศูนย์กลางลวด d=1.56; ขดลวดเริ่มต้น - จำนวนรอบในสล็อต Np=26, เส้นผ่านศูนย์กลางลวด d=1.12, จำนวนกิ่งขนานในการทำงานและขดลวดเริ่มต้น a=1
- เพื่อเริ่มต้นและ ดำเนินการตามปกติมอเตอร์เฟสเดียวเครือข่ายอุปทานต้องทนต่อกระแสเริ่มต้นและกระแสที่ แรงบิดเริ่มต้นจะอยู่ที่ประมาณเจ็ดเท่าของกระแสในขดลวดที่ใช้งาน 15.6 × 7 \u003d 109.2 A. แรงดันไฟฟ้าของตัวเก็บประจุอย่างน้อย 450 โวลต์
- เลือกความจุของคนงาน (พุธ)และตัวเรียกใช้ (เอสพี)ตัวเก็บประจุมอเตอร์ที่ไม่ได้ใช้งาน (ไม่มีโหลด)
- โดยการเพิ่มหรือลดความจุของตัวเก็บประจุ ทำให้สตาร์ทเครื่องยนต์ได้ดี หากมอเตอร์ไม่สตาร์ท (มักจะเกิดขึ้นกับมอเตอร์ไฟฟ้าที่ 3000 รอบต่อนาที) คุณจะต้องทำการบดต่อไป กลึงแหวนโรเตอร์ลัดวงจรอลูมิเนียม ส่วนตัดขวางของวงแหวนลัดวงจรจะต้องลดลง 20-50% จึงเป็นการเพิ่มความต้านทานและการลื่นไถลของโรเตอร์ โดยปกติหลังจากเพิ่มความต้านทานของโรเตอร์แล้ว มอเตอร์ไฟฟ้าก็สตาร์ทได้ง่าย
- หลังจากสตาร์ทเครื่องยนต์แล้ว ให้วัดกระแสไม่โหลดในขดลวดทำงานของมอเตอร์ไฟฟ้า ไม่มีกระแสโหลดในเฟสเดียวและสามเฟส มอเตอร์ไฟฟ้าแบบอะซิงโครนัสขึ้นอยู่กับความเร็วในการหมุน ยิ่งความเร็วของมอเตอร์ต่ำลง กระแสที่ไม่มีโหลดก็จะยิ่งเข้าใกล้กระแสไฟของมอเตอร์มากขึ้นเท่านั้น ถ้ากระแสไม่โหลดของมอเตอร์ไฟฟ้าที่ 3000 รอบต่อนาที ประมาณ 40-60% ของค่าปกติ จากนั้นให้กระแสไม่โหลดของมอเตอร์ไฟฟ้าที่ 250 รอบต่อนาที จะอยู่ที่ประมาณ 80-95% ของ จัดอันดับปัจจุบันระบุไว้บนจาน เนื่องจากเรากำลังเลือกตัวเก็บประจุที่ทำงานอยู่สำหรับมอเตอร์เฟสเดียว 3000 รอบต่อนาที กระแสรอบเดินเบาควรอยู่ที่ 40-60% ของกระแสสูงสุดในขดลวดทำงาน หลังจากคำนวณกระแสสูงสุดในขดลวดทำงานของมอเตอร์ไฟฟ้าแบบเฟสเดียวคือ 15.6 A กระแสไฟที่ไม่ได้ใช้งานควรอยู่ระหว่าง 6 ถึง 9 A
- จะทำอย่างไรถ้าเครื่องยนต์สตาร์ทได้ดี แต่กระแสในการหมุนรอบเดินเบาใกล้หรือเกินกว่า 15.6 A สตาร์ทเครื่องยนต์และหลังจากเร่งความเร็วแล้วให้ถอดตัวเก็บประจุบางส่วนออกประมาณ 30-50% ของความจุทั้งหมด ในการดำเนินงาน โดยการลดหรือเพิ่มความจุของตัวเก็บประจุที่ทำงาน เราเลือกกระแสไฟที่ไม่มีโหลดของมอเตอร์ไฟฟ้าแบบเฟสเดียวจาก 6 เป็น 9 A ตัวเก็บประจุที่ยังคงอยู่ในวงจรคดเคี้ยวของมอเตอร์ไฟฟ้าแบบเฟสเดียวเสมอเรียกว่า ที่ทำงานอย่างใดอย่างหนึ่ง (พุธ), คาปาซิเตอร์ที่ใช้สตาร์ทมอเตอร์ไฟฟ้าเท่านั้น - การสตาร์ท (เอสพี). หลังจากติดตั้งมอเตอร์ไฟฟ้าบนอุปกรณ์แล้ว สามารถปรับได้ ตัวเก็บประจุเริ่มต้นในทิศทางของการเพิ่มความจุไม่สามารถเปลี่ยนความจุของตัวเก็บประจุที่ใช้งานได้
- กระแสไม่มีโหลดของมอเตอร์ไฟฟ้าแบบเฟสเดียวเป็นเรื่องปกติ กระแสใน เริ่มคดเคี้ยวต้องไม่เกิน 7.8 ก.

วรรณกรรมในหัวข้อนี้:
Devotchenko F.S. "รีเมค มอเตอร์ไฟฟ้าสามเฟสเป็นเฟสเดียวด้วยการเปลี่ยนขดลวด" 1991
Kokorev A.S. "คู่มือนักเลงหนุ่ม เครื่องจักรไฟฟ้า"2522
Meshcheryakov V.V. , Chentsov I.M. "การคำนวณใหม่ของเครื่องจักรไฟฟ้าและตารางข้อมูลที่คดเคี้ยว" 1950
บทนำ
1. การมอบหมายโครงการรายวิชา
2. การเตรียมข้อมูลการวัดแกนแม่เหล็ก
3. การเลือกชนิดม้วน
4. การคำนวณข้อมูลที่คดเคี้ยว
5. การคำนวณจำนวนรอบที่เหมาะสมที่สุดในการหมุนของเฟสเดียว
6. การคำนวณจำนวนรอบในหนึ่งส่วน
7. การเลือกฉนวนช่องและขดลวดปลาย
8. การเลือกแบรนด์และการคำนวณส่วน ขดลวด
9. การคำนวณขนาดส่วน (ความยาวคอยล์)
10. การคำนวณมวลของขดลวด
11. ความต้านทานไฟฟ้าขดลวดของเฟสเดียว กระแสตรงเย็น
12. การคำนวณข้อมูลเล็กน้อย
13. งานสำหรับเสื้อคลุม
14. การคำนวณขดลวดชั้นเดียว
15. การคำนวณใหม่ของมอเตอร์แบบอะซิงโครนัสสำหรับพารามิเตอร์อื่น
วรรณกรรม
การแนะนำ
มอเตอร์แบบอะซิงโครนัสเป็นตัวแปลงหลัก พลังงานไฟฟ้าเป็นกลไกและเป็นพื้นฐานของการขับเคลื่อนด้วยไฟฟ้าของกลไกส่วนใหญ่ที่ใช้ในทุกภาคส่วนของเศรษฐกิจของประเทศ
มอเตอร์แบบอะซิงโครนัสใช้ไฟฟ้ามากกว่า 40% ที่ผลิตในสาธารณรัฐเบลารุส การผลิตต้องใช้วัสดุที่หายากจำนวนมาก: เหล็กไฟฟ้า ทองแดงที่คดเคี้ยว ฯลฯ แต่ค่าใช้จ่ายในการบำรุงรักษาอุปกรณ์ที่ติดตั้งจะลดลง ดังนั้น การสร้างชุด IM ที่ประหยัดและเชื่อถือได้สูงจึงเป็นงานที่สำคัญที่สุดและ ทางเลือกที่เหมาะสมเครื่องยนต์ การทำงาน และการซ่อมแซมคุณภาพสูง มีบทบาทในการประหยัดวัสดุและแรงงาน
มอเตอร์แบบอะซิงโครนัส วัตถุประสงค์ทั่วไปกำลังตั้งแต่ 0.06 ถึง 400 kW พร้อมแรงดันไฟฟ้าสูงถึง 1,000 V - เครื่องจักรไฟฟ้าที่ใช้กันอย่างแพร่หลาย ในอุทยานเศรษฐกิจแห่งชาติของมอเตอร์ไฟฟ้า คิดเป็นปริมาณ 90% และประมาณ 55% ในแง่ของกำลัง ความต้องการและด้วยเหตุนี้ การผลิตมอเตอร์แบบอะซิงโครนัสสำหรับแรงดันไฟฟ้าสูงถึง 1,000 V ในเบลารุสจึงเพิ่มขึ้นทุกปี
อายุการใช้งานของอุปกรณ์ไฟฟ้าค่อนข้างนาน (สูงสุด 20 ปี) ในช่วงเวลานี้ ระหว่างการใช้งาน องค์ประกอบบางอย่างของอายุอุปกรณ์ไฟฟ้า (ฉนวน) ส่วนอื่นๆ (แบริ่ง) จะเสื่อมสภาพ
กระบวนการของอายุและการสึกหรอปิดการใช้งานมอเตอร์ไฟฟ้า กระบวนการเหล่านี้ขึ้นอยู่กับปัจจัยหลายประการ: เงื่อนไขและรูปแบบการทำงาน การซ่อมบำรุงเป็นต้น สาเหตุหนึ่งที่ทำให้อุปกรณ์ไฟฟ้าขัดข้องคือโหมดฉุกเฉิน: โอเวอร์โหลดส่วนการทำงานของเครื่อง, วัตถุแปลกปลอมเข้าสู่เครื่องทำงาน, โหมดการทำงานแบบเปิดเฟส ฯลฯ ความล้มเหลวของมอเตอร์ไฟฟ้า หากไม่สามารถเปลี่ยนได้อย่างรวดเร็ว จะนำไปสู่การปิดสายการผลิตผลิตภัณฑ์และมักทำให้เกิดการสูญเสียวัสดุจำนวนมาก
อุปกรณ์ไฟฟ้าที่ชำรุดได้รับการฟื้นฟู ความพิเศษของงานซ่อมคือคำนวณเครื่องยนต์ก่อนซ่อม จำเป็นต้องตรวจสอบว่าข้อมูลการพันของมอเตอร์ที่มีอยู่ตรงกับข้อมูลในแค็ตตาล็อก
ข้อมูลที่ได้รับจะถูกเปรียบเทียบกับข้อมูลแคตตาล็อก เฉพาะในกรณีที่ค่าที่จำเป็นทั้งหมดตรงกันอย่างสมบูรณ์และมีความคลาดเคลื่อนเล็กน้อยระหว่างค่าเหล่านี้จึงเป็นไปได้ที่จะเริ่มซ่อมมอเตอร์ไฟฟ้า การซ่อมแซมขดลวด โดยเฉพาะอย่างยิ่งในช่วงการปรับปรุงใหม่ ต้องใช้ความรู้อย่างลึกซึ้งเกี่ยวกับวิธีการคำนวณ ความสามารถในการใช้วัสดุไฟฟ้าอย่างมีเหตุผล และค้นหาวิธีแก้ปัญหาที่ประหยัดที่สุด
1. การมอบหมายให้โครงการหลักสูตร
ตารางที่ 1. ข้อมูลเบื้องต้นสำหรับโปรเจ็กต์
ขนาดของวงจรแม่เหล็กและร่อง:
D - เส้นผ่านศูนย์กลางด้านในของแกนสเตเตอร์ mm.
D a - เส้นผ่านศูนย์กลางภายนอกของแกนสเตเตอร์ mm.
l คือความยาวรวมของแกนสเตเตอร์ mm.
Z - จำนวนร่องชิ้น
b - ความกว้างของร่องขนาดใหญ่มม.
b" คือขนาดความกว้างของร่องเล็กกว่า mm.
b w - ความกว้างของร่องร่องมม.
h คือความสูงรวมของร่อง mm.
e คือความสูงของปากร่อง mm.
δ คือความหนาของแผ่นเหล็ก มม. และชนิดของฉนวนเป็นตัวเลข
ข้อมูลจำเพาะลูกค้า:
n คือความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์ min -1
ยู เอฟ - แรงดันเฟสขดลวดสเตเตอร์,
U / Δ - รูปแบบการเชื่อมต่อเฟสที่คดเคี้ยว, ดาว / เดลต้า
f คือความถี่ปัจจุบัน Hz
ข้าว. 1. ร่างแกนสเตเตอร์ของมอเตอร์เหนี่ยวนำและรูปร่างของร่อง
2. การเตรียมข้อมูลการวัดวงจรแม่เหล็ก
การเตรียมข้อมูลการวัดวงจรแม่เหล็กจะดำเนินการเพื่อความสะดวกในการคำนวณในภายหลังและรวมถึงการคำนวณของ:
ก) พื้นที่ของเสาในช่องว่างอากาศ (Q d)
b) พื้นที่ของเสาในโซนฟันของสเตเตอร์ (Q z)
c) พื้นที่หน้าตัดของสเตเตอร์กลับ (Q c)
d) พื้นที่ร่องใส (Q p), mm 2
จำเป็นต้องใช้สามพื้นที่แรกในการคำนวณโหลดแม่เหล็ก ส่วนสุดท้ายในการคำนวณส่วนตัดขวางของลวดที่คดเคี้ยว
1. พื้นที่ของเสาในช่องว่างอากาศ
ในช่องว่างอากาศ ความต้านทานของฟลักซ์แม่เหล็กทั่วบริเวณจะเท่ากัน:
(ม. 2)โดยที่ l p คือความยาวโดยประมาณของวงจรแม่เหล็ก m
t - การแบ่งขั้ว
ไม่มีช่องระบายความร้อน
(มม.)p คือจำนวนคู่ของเสา
(พีซีเอส)2. พื้นที่ของเสาในโซนฟัน
ในบริเวณฟันของสเตเตอร์ ฟลักซ์แม่เหล็กจะไหลผ่านแผ่นเหล็กไฟฟ้า ดังนั้น พื้นที่ขั้วจะเท่ากับผลคูณของพื้นที่แอคทีฟของฟันและจำนวนในขั้ว:
โดยที่ N z คือจำนวนฟันต่อขั้ว pcs
Q 1 z - พื้นที่หนึ่งฟัน m 2
(ชิ้น) (ม. 2)โดยที่ l a คือความยาวฟันที่ใช้งาน
b z - ความกว้างของฟันเฉลี่ย
มโดยที่ Kz เป็นปัจจัยเติมของเหล็ก ขึ้นอยู่กับความหนาของแผ่นเหล็กไฟฟ้าและชนิดของฉนวน
b' z – ขนาดฟันเล็กลง
b’’ z – ขนาดฟันที่ใหญ่ขึ้น
ความกว้างของฟันที่จุดแคบ
3. พื้นที่ของวงจรแม่เหล็กที่ด้านหลังของสเตเตอร์
พื้นที่ด้านหลังสเตเตอร์ซึ่งตั้งฉากกับฟลักซ์แม่เหล็ก เท่ากับผลคูณของความสูงและความยาวแอกทีฟของวงจรแม่เหล็ก:
(ม. 2)โดยที่ h c คือความสูงของสเตเตอร์กลับ
4. ร่องในพื้นที่ที่ชัดเจน
ต้องใช้พื้นที่ร่องที่ชัดเจนในการคำนวณส่วนตัดขวางของเส้นลวดที่คดเคี้ยว ในการกำหนดพื้นที่ของร่อง ส่วนของมันถูกแบ่งโดยเส้นแกนเป็นตัวเลขง่ายๆ:
โดยที่ Qb, Qb’ คือพื้นที่ของครึ่งวงกลมที่มีเส้นผ่านศูนย์กลาง b และ b’ ตามลำดับ
Q t - โดยที่ฐานคือ b และ b ' และความสูง:
3. การเลือกประเภทม้วน
ทางเลือกขึ้นอยู่กับ:
ความเป็นไปได้ทางเทคนิคของขดลวดในสภาวะที่กำหนด
ปริมาณการใช้ลวดม้วนขั้นต่ำ
พิกัดกำลังและแรงดันไฟ;
ประเภทร่อง;
ข้อดีและข้อเสียของขดลวด
ความเป็นไปได้ทางเศรษฐกิจ
โครงร่างของขดลวดสเตเตอร์ของเครื่องจักรไฟฟ้าสามเฟสแบ่งออกเป็น:
ตามจำนวนด้านแอคทีฟของส่วนในร่อง ออกเป็นชั้นเดียว (ซึ่งด้านแอคทีฟของคอยล์หนึ่งอยู่ในร่องทั้งหมด) และสองชั้น (ด้านแอคทีฟตรงบริเวณครึ่งหนึ่งของร่อง)
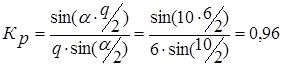
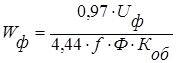
ตามขนาดพิทช์สำหรับขดลวดที่มีระยะพิทช์เต็ม (ที่ y=y’) และระยะพิทช์ที่สั้นลง (ที่ y ตามความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์เป็นความเร็วเดียวและหลายความเร็ว ตามจำนวนส่วนในกลุ่มขดลวด (ขดลวดเฟส) สำหรับขดลวดที่มีจำนวนส่วนเท่ากันในกลุ่ม (q เป็นจำนวนเต็ม) และเท่ากับ (q คือเลขเศษส่วน) ตามวิธีการม้วนพวกเขายังแบ่งออกเป็น: แม่แบบหลวม (หรือหลวม) เรียกอีกอย่างว่าขดลวดที่มีส่วนที่อ่อนนุ่ม สำหรับขดลวดดังกล่าว ส่วนต่างๆ จะถูกวางตัวนำหนึ่งตัวผ่านช่อง (ช่อง) ของร่องครึ่งปิด ใช้สำหรับเครื่องจักรพลังงานต่ำ แรงดันไฟฟ้าสูงถึง 500 V; การเจาะโดยดึงลวดผ่านร่อง ใช้สำหรับเครื่องจักรที่มีแรงดันไฟฟ้าสูงถึง 10,000 V ที่มีร่องปิดหรือกึ่งปิด วิธีการวางขดลวดนั้นลำบาก ปัจจุบันส่วนใหญ่จะใช้สำหรับการซ่อมแซมขดลวดบางส่วน ขดลวดที่มีส่วนแข็ง ส่วนสำเร็จรูป ส่วนหุ้มฉนวน ฉนวนร่องบนชิ้นส่วนที่ใช้งาน จะถูกวางไว้ในร่องเปิด ใช้สำหรับเครื่องจักรที่มีกำลังปานกลางและสูงที่มีแรงดันไฟฟ้าสูงถึง 5,000 -10000 V และอื่นๆ ตามวิธีการวางส่วนของกลุ่มคอยล์ในรูสเตเตอร์รวมถึงตำแหน่งของส่วนหน้าแบ่งออกเป็น: มีศูนย์กลางโดยมีตำแหน่งของขดลวด (ส่วน) หนึ่งด้านในอีกด้านหนึ่งและตำแหน่งของส่วนหน้าในระนาบสองหรือสามระนาบขดลวดดังกล่าวจะถูกม้วน แม่แบบที่มีส่วนเดียวกันของกลุ่มคอยล์ สามารถทำได้ทั้งแบบธรรมดาและแบบเดินเตาะแตะ หากในเทมเพลตการม้วนแบบชั้นเดียว การแยกไม่ได้ดำเนินการในครึ่งกลุ่ม แต่ในขดลวดแต่ละอัน เราจะได้วงจรที่คดเคี้ยว ข้อได้เปรียบหลักของการม้วนแบบชั้นเดียว: 1. ขาดฉนวนระหว่างชั้น ซึ่งเพิ่มปัจจัยการเติมของร่อง ส่งผลให้กระแสและกำลังของมอเตอร์ 2. ความสะดวกในการผลิต 3. ความเป็นไปได้ที่ดีในการใช้ระบบอัตโนมัติเมื่อวางขดลวด ข้อบกพร่อง: 1. เพิ่มการบริโภควัสดุที่เป็นสื่อกระแสไฟฟ้า 2. ความยากในการลดระยะพิทช์และดังนั้นจึงเป็นการชดเชยฮาร์โมนิกที่สูงขึ้นของฟลักซ์แม่เหล็ก 3. ข้อ จำกัด ของความเป็นไปได้ในการสร้างขดลวดด้วยจำนวนช่องต่อเสาและเฟสเศษส่วน 4. การผลิตและติดตั้งคอยล์สำหรับมอเตอร์ไฟฟ้าแรงสูงขนาดใหญ่ที่ใช้แรงงานมาก ขดลวดสองชั้นส่วนใหญ่ทำด้วยส่วนเดียวกัน: ห่วงและโซ่ มักใช้ส่วนที่มีศูนย์กลางน้อยกว่า ข้อได้เปรียบหลักของการม้วนแบบสองชั้นเมื่อเปรียบเทียบกับการม้วนแบบชั้นเดียว: 1. ความเป็นไปได้ของการลดขั้นตอนใด ๆ ซึ่งช่วยให้: ก) ลดการใช้ลวดคดเคี้ยวโดยลดความยาวของส่วนหน้าของส่วน b) ลดองค์ประกอบฮาร์มอนิกที่สูงขึ้นของฟลักซ์แม่เหล็ก นั่นคือ ลดการสูญเสียในวงจรแม่เหล็กของมอเตอร์ 2. ความเรียบง่ายของกระบวนการทางเทคโนโลยีของการผลิตคอยส์ (สามารถดำเนินการได้หลายอย่าง) 3. ความเป็นไปได้ของการพันด้วยเศษส่วน q เกือบทุกส่วน ซึ่งทำให้มั่นใจได้ว่าการผลิตขดลวดในระหว่างการซ่อมแซมมอเตอร์แบบอะซิงโครนัสด้วยการเปลี่ยนแปลงความเร็วของโรเตอร์ นอกจากนี้ นี่เป็นวิธีหนึ่งในการประมาณรูปร่างของสนามให้เป็นไซนัสอยด์ 4. ความเป็นไปได้ในการสร้างสาขาขนานจำนวนมากขึ้น ข้อเสียของขดลวดสองชั้น ได้แก่ : 1. ปัจจัยการเติมที่ต่ำกว่าของร่อง (เนื่องจากมีฉนวนระหว่างชั้น) 2. ความยากลำบากในการวางส่วนสุดท้ายของขดลวด 3. จำเป็นต้องยกขั้นตอนที่คดเคี้ยวทั้งหมดหากส่วนล่างของส่วนเสียหาย ด้วยเหตุผลเหล่านี้ ในปัจจุบัน ในการซ่อมเครื่องจักร กระแสสลับขดลวดสองชั้นใช้กันอย่างแพร่หลายมากที่สุด ดังนั้นเราจึงเลือกการม้วนแบบวนซ้ำสองชั้น 4. การคำนวณข้อมูลที่คดเคี้ยว ขดลวดของมอเตอร์เหนี่ยวนำที่อยู่ในวงจรแม่เหล็กของสเตเตอร์ประกอบด้วยขดลวดสามเฟสอิสระ (A, B, C) ขดลวดของเครื่อง AC สามเฟสมีลักษณะเฉพาะโดยข้อมูลการคดเคี้ยวต่อไปนี้: y - สนามที่คดเคี้ยว; q คือจำนวนช่องต่อขั้วและเฟส (เท่ากับจำนวนส่วนในกลุ่มขดลวด) N คือจำนวนกลุ่มคอยล์ a คือจำนวนองศาไฟฟ้าต่อช่อง a คือจำนวนกิ่งขนาน 1. สนามคดเคี้ยว ระยะพิทช์ที่คดเคี้ยว (y) คือระยะห่างที่แสดงเป็นฟัน (หรือร่อง) ระหว่างด้านที่ใช้งานของส่วนเดียวกัน: โดยที่ y' คือขั้นตอนที่คำนวณได้ (เท่ากับการแบ่งขั้วที่แสดงเป็นฟัน) x - จำนวนที่น้อยกว่าหนึ่งโดยนำขั้นตอนที่คำนวณ (y') เป็นจำนวนเต็ม ในทางปฏิบัติ การกำหนดขั้นตอนในร่องนั้นเป็นเรื่องปกติ ดังนั้นเมื่อวางด้านที่สองของส่วนออก มันจะอยู่ในร่อง y + 1 ขดลวดสองชั้นจะดำเนินการโดยทำให้ระยะพิทช์สั้นลง โดยที่ Ku คือสัมประสิทธิ์การทำให้ระยะพิทช์ของขดลวดสั้นลง ในทางปฏิบัติและการคำนวณพบว่าเส้นโค้งที่ดีที่สุดสำหรับการเปลี่ยนฟลักซ์แม่เหล็กนั้นได้มาจากการลดขั้นตอน diametrical (คำนวณ) โดย Ku=0.8: y=0.8×18=14.4 เราใช้ y=14 2. จำนวนช่องต่อเสาและเฟส จำนวนช่องต่อขั้วและเฟส (q) กำหนดจำนวนส่วนในกลุ่มขดลวด: โดยที่ m คือจำนวนเฟส ขดลวดแต่ละขดมีส่วนร่วมในการสร้างสองขั้ว เนื่องจากตัวนำที่ใช้งานอยู่ของด้านใดด้านหนึ่งมีกระแสหนึ่งทิศทางเดียว ในขณะที่อีกด้านหนึ่งอยู่ตรงข้าม เมื่อ q>1 ขดลวดจะเรียกว่ากระจัดกระจาย ในขณะที่ขดลวดเฟสจะต้องแบ่งออกเป็นส่วนๆ ซึ่งมีจำนวนเท่ากับ q 3. จำนวนกลุ่มคอยล์ ในขดลวดสองชั้น จำนวนกลุ่มขดลวดจะเพิ่มเป็นสองเท่าทางกลไก อย่างไรก็ตาม เมื่อเทียบกับขดลวดชั้นเดียวที่มีจำนวนรอบในแต่ละส่วนน้อยกว่าสองเท่า ดังนั้น: โดยที่ N 1f (2) คือจำนวนกลุ่มขดลวดในหนึ่งเฟสของขดลวดสองชั้น เนื่องจากเสาแต่ละคู่ถูกสร้างขึ้นโดยกระแสสลับทั้งสามเฟส ดังนั้น: 4. จำนวนองศาไฟฟ้าต่อช่อง ในรูสเตเตอร์ของมอเตอร์แบบอะซิงโครนัส ขั้วหนึ่งคู่คือ 360 0 el เห็นได้ชัดเจนในรูปที่ 2 เมื่อตัวนำผ่านใต้เสาคู่หนึ่งในสเตเตอร์เจาะจนหมดในการปฏิวัติครั้งเดียว EMF ในนั้น (ปรากฏขึ้น) จะเปลี่ยนแปลงในลักษณะไซน์ ในกรณีนี้ จะเกิดการเปลี่ยนแปลงอย่างเต็มรูปแบบ ซึ่งก็คือ 360 องศาไฟฟ้า (รูปที่ 2) จำนวนองศาไฟฟ้าต่อช่อง หรือการเลื่อนเชิงมุมระหว่างช่องที่อยู่ติดกัน: 5. จำนวนสาขาคู่ขนาน กิ่งก้านคู่ขนานในขดลวดของมอเตอร์เหนี่ยวนำทำขึ้นเพื่อลดส่วนตัดขวางของลวดทั่วไป นอกจากนี้ยังช่วยให้โหลดระบบแม่เหล็กของเครื่องได้ดีขึ้น เราเชื่อมต่อกลุ่มคอยล์ทั้งหมดของเฟสนี้เป็นอนุกรม จากนั้นจำนวนกิ่งขนานคือ 1 (a = 1) (รูปที่ 3) ในรูป ตัวอักษร H และ K แสดงถึงจุดเริ่มต้นและจุดสิ้นสุดของกลุ่มขดลวดตามลำดับ ข้าว. 3. การเชื่อมต่อกลุ่มคอยล์ เมื่อเชื่อมต่อแบบขนานจำนวนกิ่งขนานสามารถเท่ากับจำนวนกลุ่มคอยล์ในหนึ่งเฟส N 1f กลุ่มคอยล์ของเฟสสามารถเชื่อมต่อและรวมกันได้ (ส่วนหนึ่งเป็นอนุกรมและบางส่วนขนานกัน) แต่ในกรณีนี้ จำนวนกลุ่มคอยล์ในแต่ละสาขาขนานจะต้องเท่ากัน a = 2 จำนวนกิ่งขนานจะถูกป้อนเมื่อจำเป็นต้องลดส่วนตัดขวางของเส้นลวด จำนวนสาขาขนานสูงสุด: และสูงสุด =2×p=2×1=2, ยอมรับ a=1 6. หลักการสร้างวงจรของขดลวดสเตเตอร์ของมอเตอร์แบบอะซิงโครนัสสามเฟส เพื่อให้ได้สนามแม่เหล็กหมุนของมอเตอร์แบบอะซิงโครนัสสามเฟสสำหรับรูปแบบการม้วนใด ๆ จะต้อง: 1. การกระจัดในพื้นที่ของสเตเตอร์เจาะมอเตอร์แบบอะซิงโครนัสของขดลวดเฟสซึ่งสัมพันธ์กับอีกอันหนึ่ง 120 0 el 2. การเลื่อนเวลาของกระแสน้ำที่ไหลผ่านขดลวดเหล่านี้โดย เงื่อนไขแรกเป็นที่พอใจโดยการซ้อนกลุ่มคอยล์ที่เหมาะสม ขดลวดสามเฟสครั้งที่สอง - โดยการเชื่อมต่อมอเตอร์แบบอะซิงโครนัสกับเครือข่ายกระแสไฟสามเฟส เมื่อสร้างวงจร โดยทั่วไปการพันของเฟสแรกสามารถเริ่มจากช่องใดก็ได้ ดังนั้นด้านแอ็คทีฟแรกของส่วนจึงอยู่ในร่องแรก เราวางด้านที่ใช้งานที่สองของส่วนผ่านฟันสิบซี่ลงในร่องที่สิบเอ็ด กลุ่มขดลวดหนึ่งกลุ่มมีสี่ส่วน จากนั้นส่วนที่สองและต่อมาจะมีช่อง 2 และ 12, 3 และ 13, 4 และ 14 ตามลำดับ จำนวนกลุ่มคอยล์ของหนึ่งเฟสจะเป็นสี่ (คำนวณด้านบน) ในการพันขดลวดชั้นเดียว กลุ่มขดลวดแรกมีส่วนร่วมในการสร้างเสาคู่แรก กลุ่มที่สองต้องสร้างเสาคู่ที่สอง ดังนั้นระยะห่างระหว่างพวกเขาจะต้องเท่ากับเสาหนึ่งคู่ นั่นคือ 360 องศาไฟฟ้า ต่างจากขดลวดชั้นเดียวในขดลวดสองชั้น กลุ่มคอยล์ของเฟสเดียวกันจะไม่ถูกเลื่อนโดย 360 องศาไฟฟ้า แต่เพิ่มขึ้น 180 ดังนั้นขดลวดที่สองของเฟส "A" จึงเริ่มจากร่องที่ 19 ขดลวดของเฟส "B" และ "C" ดำเนินการในทำนองเดียวกัน แต่จะเลื่อนตามลำดับโดย 120 และ 240 องศาไฟฟ้าที่สัมพันธ์กับขดลวดของเฟส "A" เช่น ในร่องจะเป็น: 5. การคำนวณจำนวนเทิร์นในรอบหนึ่งเฟส b) แผนภาพเวกเตอร์ของมอเตอร์เหนี่ยวนำ เมื่อใช้แรงดันไฟฟ้า U f กับขดลวด กระแสไม่มีโหลดจะไหลผ่าน (รูปที่ 4) เนื่องจากแรงดันไฟฟ้าแปรผันตามไซน์ กระแสจึงแปรผัน ในทางกลับกันก็จะสร้างฟลักซ์แม่เหล็ก Ф ในระบบแม่เหล็กของเครื่อง ซึ่งจะแปรผันได้เช่นกัน ฟลักซ์แม่เหล็กแบบแปรผัน Ф ถูกเหนี่ยวนำในการหมุนของขดลวด ซึ่งทำให้เกิด EMF (E Ф) ซึ่งมุ่งตรงไปยังแรงดันไฟฟ้าที่ตรงข้ามกัน (กฎของการเหนี่ยวนำแม่เหล็กไฟฟ้า) EMF ของเฟสที่คดเคี้ยว E F จะเป็นผลรวมของ EMF ของแต่ละรอบ E 1v E f \u003d å E 1v หรือ E f \u003d E 1v × W f โดยที่ W f คือจำนวนรอบในขดลวดของเฟสเดียว นอกจากนี้กระแส I xx จะสร้างแรงดันตก DU บนความต้านทานแบบแอคทีฟและรีแอกทีฟของขดลวด ดังนั้นแรงดันไฟฟ้า U f ที่ใช้กับขดลวดจึงสมดุลโดย EMF E F และแรงดันไฟฟ้าตกในขดลวด DU ทั้งหมดนี้แสดงในรูปแบบเวกเตอร์ในไดอะแกรมเวกเตอร์แบบง่าย (รูปที่ 4) จากรูปข้างบนและแผนภาพเวกเตอร์ จะได้ว่า แรงดันไฟฟ้าตกคือ 2.5 ... 4% ของ U f นั่นคือโดยเฉลี่ยประมาณ 3% โดยไม่กระทบต่อความแม่นยำของการคำนวณ คุณสามารถใช้: อี ฉ = 0.97× ยู ฉ; โดยที่ E f คือ EMF ของเฟสที่คดเคี้ยว V U f - แรงดันเฟส V ค่า EMF ทันทีในเทิร์นเดียว: ที่ไหน เสื้อ - เวลา s ฟลักซ์แม่เหล็กเปลี่ยนแปลงตามกฎหมาย: Ф=Ф ม. ×บาป×w×t, โดยที่ F m - ค่าแอมพลิจูดของฟลักซ์แม่เหล็ก Wb; w คือความถี่เชิงมุมของการหมุนของสนาม ค่าสูงสุดของ EMF หนึ่งเทิร์นจะเป็นเมื่อ แล้ว (เพราะ มูลค่าที่แท้จริงแตกต่างจากค่าสูงสุดโดย เนื่องจากขดลวดกระจายตัว ส่วนหนึ่งของฟลักซ์แม่เหล็ก F จะกระจายไป ซึ่งคำนึงถึงค่าสัมประสิทธิ์การกระจาย K p: ขดลวดสองชั้นเกือบทั้งหมดทำด้วยระยะพิทช์สั้นลง สิ่งนี้นำไปสู่ความจริงที่ว่าที่ขอบเขตของเสาของส่วนต่าง ๆ ที่อยู่ในร่องเดียวกันทิศทางของกระแสน้ำจะตรงกันข้าม ดังนั้นฟลักซ์ทั้งหมดจากส่วนเหล่านี้จะเท่ากับศูนย์ ซึ่งจะลดฟลักซ์แม่เหล็กทั้งหมด F ปรากฏการณ์นี้คำนึงถึงปัจจัยการทำให้สั้นลง K y: K เกี่ยวกับ \u003d K p × K y \u003d 0.96 × 0.94 \u003d 0.9 จากนั้นในที่สุด EMF ของหนึ่งเทิร์นจะเท่ากับ: จำนวนรอบต่อเฟส: ในนิพจน์ผลลัพธ์ ลูกค้าให้ U f และ f คุณต้องรู้เฉพาะ F สำหรับการคำนวณ มันถูกกระจายอย่างเท่าเทียมกันภายใต้เสา (รูปที่ 5) อย่างไรก็ตาม หากพื้นที่ของสี่เหลี่ยมที่มีด้าน B cf และ a ครึ่งวงกลมมีรัศมี B d เท่ากัน ขนาดของสนามแม่เหล็กใต้ขั้วจะเท่ากัน ค่าของการเหนี่ยวนำแม่เหล็กเฉลี่ย: В ср - ค่าเฉลี่ยของการเหนี่ยวนำแม่เหล็กในช่องว่างอากาศ Тl C b - ค่าสูงสุดของการเหนี่ยวนำแม่เหล็กในช่องว่างอากาศ T จากตาราง "โหลดแม่เหล็กไฟฟ้าปกติของมอเตอร์แบบอะซิงโครนัส" สำหรับพลังงานตั้งแต่ 1 ถึง 10 กิโลวัตต์ เรายอมรับ B b \u003d 0.7 ดังนั้นค่าของฟลักซ์แม่เหล็ก: จำนวนรอบต่อเฟส: จำนวนรอบเบื้องต้นในเฟสคือ 94.52 ชิ้นการพันดังกล่าวไม่สามารถทำได้เนื่องจากไม่สามารถใส่ส่วนหนึ่งของการเลี้ยวเข้าไปในช่องสเตเตอร์ได้ ในทางกลับกันเมื่อแบ่งจำนวนรอบของเฟสที่คดเคี้ยวออกเป็นส่วน ๆ จำเป็นต้องกระจายอย่างสม่ำเสมอเพื่อให้จำนวนรอบในทุกส่วนของคดเคี้ยว W วินาทีเท่ากัน ขดลวดดังกล่าวเรียกว่าส่วนที่เท่ากัน . เงื่อนไขของส่วนที่เท่ากันนั้นเป็นไปตามนิพจน์สำหรับจำนวนของตัวนำที่ใช้งานอยู่ในร่อง: โดยที่ a คือจำนวนสาขาขนานกัน ในสูตร สองตัวในตัวเศษแสดงว่าขดลวดมีตัวนำไฟฟ้าสองตัว เพื่อให้จำนวนรอบในส่วนเท่ากัน จำเป็นต้องปัดเศษจำนวนของตัวนำที่ใช้งานอยู่ในร่อง: ด้วยชั้นเดียวที่คดเคี้ยวขึ้นถึง ค่าจำนวนเต็ม, ด้วยสองชั้น - จนถึงจำนวนเต็มคู่ เราปัดเศษจำนวนตัวนำในร่องให้เป็นจำนวนเต็มคู่และหา Np = 16 หลังจากปัดเศษจำนวนตัวนำในร่องแล้วเราจะระบุจำนวนรอบในเฟส เราระบุฟลักซ์แม่เหล็กเนื่องจากขึ้นอยู่กับจำนวนรอบในเฟส เราระบุค่าของการเหนี่ยวนำแม่เหล็ก B d, B z, B c การเหนี่ยวนำแม่เหล็กในช่องว่างอากาศ: การเหนี่ยวนำแม่เหล็กในบริเวณฟันของสเตเตอร์: การเหนี่ยวนำแม่เหล็กที่ด้านหลังของสเตเตอร์: เราเปรียบเทียบกับค่าสูงสุดที่อนุญาต ตัวเลือกทั้งหมดสำหรับการคำนวณการเหนี่ยวนำแม่เหล็กสรุปไว้ในตารางที่ 2 ตารางที่ 2 โหลดวงจรแม่เหล็ก ชื่อ สูตรคำนวณ ตัวเลือกการคำนวณ ขีดจำกัด จำนวนตัวนำในร่อง N p จำนวนรอบในขดลวดของเฟสเดียว W f ขนาดของฟลักซ์แม่เหล็ก Ф ที่ W f การเหนี่ยวนำช่องว่างอากาศ V d การเหนี่ยวนำในฟัน V z การเหนี่ยวนำที่ด้านหลังของสเตเตอร์ V s จากผลการคำนวณ ตารางแสดงให้เห็นว่าตัวเลือกที่เหมาะสมที่สุดคือ 2 ซึ่งเครื่องยนต์ที่คำนวณได้จะให้กำลังสูงสุดสำหรับระบบแม่เหล็ก หากโหลดสูงสุดเป็นปกติ นี่จะเป็นตัวเลือกที่ดีที่สุด หากการเหนี่ยวนำแม่เหล็กในบางส่วนต่ำกว่ามาตรฐาน กล่าวคือ ส่วนนั้นรับน้ำหนักน้อยเกินไป (3) และในกรณีนี้ เหล็กของวงจรแม่เหล็กของมอเตอร์เหนี่ยวนำจะใช้น้อยเกินไป กำลังของมอเตอร์จะถูกประเมินต่ำไป หากโหลดแม่เหล็กสูงกว่าค่าปกติในส่วนใด ๆ ส่วนนี้จะโอเวอร์โหลดและมอเตอร์ร้อนเกินไป ไม่อนุญาตให้ใช้ตัวเลือกนี้ (1) ตัวเลือกที่ 2 จะดีที่สุด 6. การคำนวณจำนวนเทิร์นในส่วนเดียว ด้วยการม้วนแบบชั้นเดียวตัวนำของส่วนหนึ่ง (W วินาที) จะครอบครองร่องอย่างสมบูรณ์ ดังนั้นจำนวนรอบในส่วนจึงเท่ากับจำนวนของตัวนำที่ใช้งานอยู่ในร่อง ด้วยขดลวดสองชั้น ตัวนำของสองส่วนจะอยู่ในร่องเดียว ดังนั้นจำนวนรอบในส่วนขดลวดสองชั้น (W วินาที) จะเท่ากับครึ่งหนึ่งของจำนวนตัวนำในร่อง 7. การเลือกฉนวนของร่องและหัวม้วน จุดประสงค์ของฉนวนนี้คือเพื่อให้มีความแข็งแรงทางไฟฟ้าที่จำเป็นระหว่างขดลวดของเฟสต่างๆ เช่นเดียวกับขดลวดและวงจรแม่เหล็ก (เคส) ของมอเตอร์เหนี่ยวนำ นอกจากนี้ยังต้องมีคุณสมบัติตรงตามข้อกำหนดด้านความทนทานต่อความร้อน ทนต่อสารเคมี ทนต่อความชื้น เป็นต้น ฉนวนร่อง (รูปที่ 6) ประกอบด้วยกล่องร่อง 1, ปะเก็น interlayer 2 (ถ้าขดลวดเป็นสองชั้น), ปะเก็นลิ่ม 3 และลิ่มร่อง 4 ปะเก็นระหว่างเฟสยังติดตั้งในส่วนหน้า ส่วนหรือกลุ่มขดลวด ฉนวนภายในข้อต่อเครื่อง เช่นเดียวกับใต้ผ้าพันแผลในช่องและส่วนหน้าของขดลวด เมื่อทำการซ่อม IM ซีรีส์ A, A0, A2, A02 ที่มีความต้านทานความร้อนของฉนวน: A และ E (ซึ่งยังคงเป็นเสียงส่วนใหญ่ในสาธารณรัฐเบลารุส) ได้รับความนิยมสูงสุด สล็อตบ็อกซ์ 3 ชั้นของภาษาถิ่น: ชั้นแรก (วางในร่องบนวงจรแม่เหล็ก) โดยมีจุดประสงค์เพื่อป้องกันชั้นที่สองจากความเสียหายจากแผ่นเหล็ก อย่างแรกเลย วัสดุเหล่านี้ต้องการความแข็งแรงเชิงกลสูง ชั้นที่สองเป็นหลัก การแยกไฟฟ้าต้องใช้กำลังไฟฟ้าสูง (ผ้าเคลือบเงา ฟิล์มยืดหยุ่น ฯลฯ) ชั้นที่สามทำจากอิเล็กทริกที่แข็งแรงทางกลไกเช่นเดียวกับชั้นแรกปกป้องชั้นที่สองจากความเสียหาย แต่ด้วยตัวนำแบบแอคทีฟที่วางอยู่ในร่อง (กระดาษแข็งไฟฟ้ากระดาษเคเบิล ฯลฯ ) กล่องร่องควรแนบสนิทกับผนังร่อง ไม่ย่นเวลาวางม้วน ทนทานต่อการฉีกขาด ต่อย ลอกเป็นแผ่น และลื่นพอสมควร ฉนวนใต้ผ้าห่อศพยังทำเป็นสามชั้นและปะเก็นระหว่างเฟสในส่วนหน้าของขดลวดสามารถมีได้หนึ่งสองหรือสามชั้นขึ้นอยู่กับวัสดุที่ใช้ วัสดุฉนวนไฟฟ้าสำหรับชิ้นส่วนที่คดเคี้ยวทั้งหมดจะถูกเลือกโดยขึ้นอยู่กับแรงดันไฟฟ้าของเครื่อง ระดับความต้านทานความร้อน สภาพการทำงาน การปรากฏตัวของวัสดุไดอิเล็กทริกและด้วยเหตุผลทางเศรษฐกิจ ประยุกต์กว้างในยุคปัจจุบัน เครื่องจักรไฟฟ้าแรงดันไฟฟ้าสูงถึง 1,000 V ได้รับฟิล์มสังเคราะห์และวัสดุที่ใช้งานได้ - วัสดุคอมโพสิต สามารถลดความหนาของฉนวนได้อย่างมากเนื่องจากมีความแข็งแรงทางไฟฟ้าและมักจะมีความแข็งแรงทางกล ซึ่งจะเป็นการเพิ่มปัจจัยการเติมของร่อง ฟิล์ม PET โพลีเอทิลีนเทเรฟทาเลต (lavsan) และแผ่นฟิล์ม-อิเล็กโทรคาร์ดบอร์ดใช้เป็นหลักในการผลิตกล่องสล็อตและปะเก็น ในกรณีนี้ แผ่นฟิล์มอิเล็กโทรคาร์ดสองแถบถูกพับด้วยฟิล์มด้านใน ฟิล์มโพลีอะมายด์ PM ใช้ในเครื่องจักรไฟฟ้าที่มีความต้านทานความร้อนของฉนวนสูงถึง 220 0 C ฟิล์มฟลูออโรเรซิ่น F-4EO, F-4EN มีความทนทานต่อความชื้นสูง ทนทานต่อตัวทำละลาย สารเคมี สื่อที่ใช้งานและใช้ในเครื่องจักรวัตถุประสงค์พิเศษ (เช่น สำหรับการทำงานในคอมเพรสเซอร์แบบฟรีออน) และในกรณีที่ความต้านทานความร้อนของฉนวนควรสูงกว่า 2200 องศาเซลเซียส อย่างไรก็ตาม ฟิล์มฟลูออโรเรซิ่นจะมีความนิ่มจึงถูกนำมาใช้เป็นฉนวนร่องร่วมกัน กับวัสดุอื่นๆ ที่แข็งกว่า วัสดุคอมโพสิตมีคุณสมบัติทางกลสูงเพียงพอ โดยจะจำหน่ายเป็นม้วน แผ่นฟิล์ม PET-F และ PSK-LP ประกอบด้วยแผ่นฟิล์ม PET ที่ติดทั้งสองด้านด้วยกระดาษเส้นใยฟีนิล (PSK-D) หรือกระดาษใยลาวาซานที่ไม่มีการเคลือบ (PSK-L) หรือเคลือบด้วยกระดาษไฟเบอร์ฟีนิล (PSK-LP) ฟิล์มไมกา GIP-LSP-PL เป็นชั้นของไมกาฟโลโกไพท์ซึ่งติดกาวที่ด้านหนึ่งด้วยไฟเบอร์กลาส และอีกด้านหนึ่งด้วยฟิล์ม PET มีการใช้กันอย่างแพร่หลายเพื่อป้องกันขดลวดจากส่วนที่แข็ง สำหรับปะเก็นในส่วนหน้าวัสดุที่ใช้พื้นผิวที่มีค่าสัมประสิทธิ์แรงเสียดทานเพิ่มขึ้นโดยเฉพาะกระดาษเคเบิล, กระดาษแข็งไฟฟ้าบาง ๆ , ไมกาฟิล์ม, ฟิล์มใยหิน (ใช้ในเครื่องยนต์ของซีรีย์ A, A2, A4 ). ฉนวนของการเชื่อมต่อในเครื่องและปลายเอาต์พุต ดำเนินการ ท่อฉนวน. ในสถานที่ที่ไม่อยู่ภายใต้การดัด บิด และอัด (เมื่อเชื่อมต่อวงจร) จะใช้ท่อเคลือบเงาของแบรนด์ต่อไปนี้: TLV และ TLS (ขึ้นอยู่กับสต็อกแก้วและน้ำมันเคลือบเงา) - สำหรับเครื่องจักรที่มีฉนวนกันความร้อนระดับ A สำหรับการใช้งานภายใต้สภาวะปกติ สิ่งแวดล้อม; TES - สำหรับเครื่องจักรที่มีความต้านทานความร้อนคลาส B ของทุกรุ่น TKS - สำหรับเครื่องจักรที่มีความต้านทานความร้อนระดับ F และ H ของการออกแบบที่ทนทานต่อสารเคมี หลอดที่ใช้ยางออร์กาโนฟลูออรีนเกรด TRF มีความยืดหยุ่นและทนต่อการบิดงอได้มากที่สุด สำหรับการป้องกันทางกลและการยึดฉนวนจะใช้เทปผ้าฝ้ายแก้วและลาวาซาน เทปผ้าฝ้ายใช้เฉพาะในเครื่องจักรที่มีความต้านทานความร้อนระดับ A และอยู่ในรูปแบบที่ชุบเท่านั้น เทปแก้วเหมาะสำหรับเครื่องจักรที่มีคลาสทนความร้อน E, B, F และ H ทุกรุ่น เพื่อลดการปล่อยฝุ่นจากเทปแก้ว พวกเขาจะเคลือบด้วยสารเคลือบเงาระหว่างฉนวน เทป Lavsan ได้รับการพัฒนาในช่วงไม่กี่ปีที่ผ่านมาและกำลังเปิดตัวสู่การผลิต พวกเขาสามารถแทนที่ไม่เพียง แต่เทปแก้ว แต่ยังรวมถึงสายไฟ สามารถใช้กับขดลวดที่มีฉนวนคลาส H. เทป Lavsan ไม่ต้องการการชุบ ความหนาของริบบิ้น lavsan: ผ้าดิบ - 0.14 มม., cambric - 0.15 มม. ที่ใช้กันมากที่สุดสำหรับขดลวดคือเทป taffeta lavsan มีความกว้าง 20, 28, 30 มม. ด้วยความกว้าง 20 มม. แรงทำลายของเทปดังกล่าวคือ 390 N ข้อได้เปรียบที่สำคัญของเทป lavsan คือการหดตัวหลังจากการอบชุบด้วยความร้อน ส่งผลให้ฉนวนมีการยืดตัวเพิ่มขึ้น ในการเชื่อมโยงและพันขดลวดสเตเตอร์ในส่วนหน้า ถุงน่องสายฝ้ายใช้สำหรับฉนวนกันความร้อนคลาส A และถุงน่องแก้วสำหรับชั้นทนความร้อน B, F, H. โดยคำนึงถึงแรงดันไฟฟ้า ระดับความต้านทานความร้อน สภาพการทำงานของ IM การมีอยู่ของวัสดุอิเล็กทริกและการพิจารณาด้านเศรษฐกิจ เราเลือกฟิล์มเซลลูโลสไตรอะซิเตทสังเคราะห์ที่มีความหนา 35 ไมครอน เรายังใช้วัสดุคอมโพสิตจากฟิล์มสังเคราะห์ (เราเลือกกระดาษแข็งสังเคราะห์ฟิล์ม PSK-LP หนา 0.30 มม.) เราจะป้องกันการเชื่อมต่อภายในและทางออกด้วยท่อฉนวนไฟฟ้า TPP ที่มีเส้นผ่านศูนย์กลางภายใน 2.5 มม. สำหรับการป้องกันทางกลและการยึดฉนวน เราใช้ผ้าฝ้ายลาวาซานและเทปแก้ว LES หนา 0.08 มม. สำหรับการผูกและพันผ้าพันแผล เราใช้ถุงน่องผ้าฝ้าย ASEC (b) -1.0 วัสดุที่เลือกสำหรับฉนวนของร่องและปลายม้วน: ชั้นที่ 1 - กระดาษแข็ง EMU ความหนา ชั้นที่ 2 - ผ้าเคลือบเงา LHM-105 หนา ชั้นที่ 3 - กระดาษแข็ง EMU ความหนา ความแข็งแรงทางไฟฟ้าของชั้นที่ 1: ความแข็งแรงทางไฟฟ้าของชั้นที่ 2: ความแข็งแรงทางไฟฟ้าของชั้นที่ 3: ความแข็งแรงทางไฟฟ้ารวมของกล่องฉนวนแบบ slotted: การตรวจสอบความแรงทางไฟฟ้าของปลอกหุ้ม: เพราะ 12>1.0+2 จากนั้นฉนวนจะเป็นไปตามเงื่อนไขที่ตั้งไว้และสามารถใช้ไดอิเล็กทริกได้ด้วยความหนาที่เล็กกว่า อย่างไรก็ตาม เนื่องจากความจำเป็นในการตรวจสอบความแข็งแรงทางกลที่จำเป็นของฉนวน วัสดุที่เลือกจึงสามารถอนุมัติได้ 8. การเลือกยี่ห้อและการคำนวณส่วนของขดลวด การเลือกยี่ห้อลวดขึ้นอยู่กับแรงดันไฟฟ้า ระดับความต้านทานความร้อน รุ่น กำลังมอเตอร์ และการพิจารณาด้านเศรษฐกิจ ส่วนตัดขวางโดยประมาณของเส้นลวดพร้อมฉนวน: โดยที่ K z คือปัจจัยการเติมของร่อง K s \u003d 0.48 เส้นผ่านศูนย์กลางนี้ไม่อยู่ในตาราง เราจึงเลือกจำนวนส่วนขนาน a’ = 2 คำนวณเส้นผ่านศูนย์กลางลวดพร้อมฉนวน: เส้นผ่านศูนย์กลาง ลวดหุ้มฉนวนต้องน้อยกว่าความกว้างร่อง d' 1.5 ... 2 มม.
เส้นผ่านศูนย์กลางมาตรฐานของลวดฉนวน ส่วนรั้วรอบขอบชิด: กำหนดปัจจัยเติมที่แท้จริงของร่อง: เราจะไขลานมอเตอร์ด้วยลวด: 9. การคำนวณขนาดส่วน (ความยาวคอยล์) การกำหนดความยาวของขดลวดจำเป็นต้องกำหนดแม่แบบในการผลิตส่วนต่างๆ ของกลุ่มขดลวด ความยาวขดลวดเฉลี่ย: โดยที่ l a คือความยาวของช่อง (ใช้งาน) ของขดลวด m ในกรณีที่ไม่มีช่องระบายความร้อนตามขวางในวงจรแม่เหล็ก ล. - ความยาวของส่วนหน้าของขดลวด ม. โดยที่ k - ปัจจัยการแก้ไข T คือความกว้างของส่วนเฉลี่ย m 10. การคำนวณน้ำหนักม้วน การคำนวณมวลของขดลวดจำเป็นต้องได้รับลวดม้วนจากคลังสินค้า มวลของโลหะที่คดเคี้ยวถูกกำหนดโดยการคูณความหนาแน่นของวัสดุตัวนำด้วยปริมาตรของเส้นลวด: โดยที่ g คือความหนาแน่นของวัสดุตัวนำ kg / m 3 (สำหรับทองแดง - 8900 kg / m 3)ขดลวดชั้นเดียวส่วนใหญ่ทำด้วยเทมเพลตอย่างง่าย, เทมเพลตใน "พัง", โซ่, ศูนย์กลาง
![]()
![]() 2×1=2
2×1=2 ![]()

ข้าว. 2. EMF เปลี่ยนใต้เสา ![]()
![]() .
.
![]() ;
; ![]()
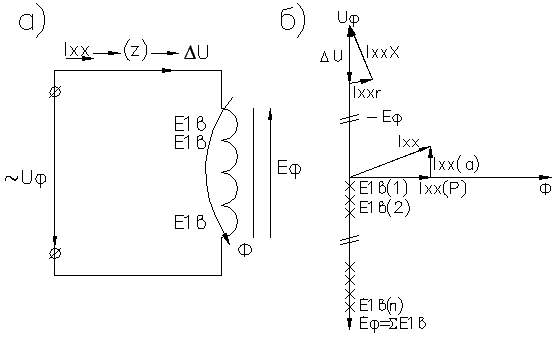
ข้าว. 4. ก) วงจรสมมูลของขดลวดของมอเตอร์แบบอะซิงโครนัส 
![]()
![]()
![]()
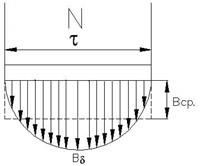
ข้าว. 5. สนามแม่เหล็กของเสา  (Wb) - ค่าสัมประสิทธิ์คำนึงถึงความสม่ำเสมอของการกระจายของฟลักซ์แม่เหล็กใต้เสา
(Wb) - ค่าสัมประสิทธิ์คำนึงถึงความสม่ำเสมอของการกระจายของฟลักซ์แม่เหล็กใต้เสา  PCS
PCS ![]() PCS
PCS  wb
wb  Tl
Tl  Tl
Tl ![]() Tl
Tl
![]()
![]()
![]()

ข้าว. 6. ฉนวนกันความร้อนช่องคดเคี้ยว ![]() กิโลโวลต์;
กิโลโวลต์; ![]() กิโลโวลต์
กิโลโวลต์  มม.2
มม.2  มม
มม  มม
มม ![]()

![]() (ม.)
(ม.)
เราแนะนำให้คุณอ่าน
, การวินิจฉัย, การรักษา, การรักษาโรคหนองในเทียม")




