Esistono diverse classi di convertitori elettrici, tra cui uso pratico trovato i cosiddetti analoghi induttivi. In essi avviene la conversione di energia dovuta alla conversione dell'induzione degli avvolgimenti, che sono parte integrante dell'unità stessa. Gli avvolgimenti si trovano su due elementi: sullo statore e sul rotore. Quindi, qual è la differenza tra uno statore e un rotore (quali sono e quali sono le loro funzioni?).
In questo modo il carico elettrico di punta si riduce a un terzo, il consumo di energia rimane identico. Gli acquirenti di elettricità come i parchi di divertimento vengono generalmente addebitati in base al loro carico massimo in Europa e possono ridurre significativamente i costi operativi immagazzinando energia. Come fonte, ha utilizzato un set di 320 celle galvaniche. A causa del prezzo elevato della batteria, ha dovuto smettere di provare. Oggi non possiamo fare a meno dei motori elettrici, sono usati un po' ovunque.
La definizione più semplice delle due parti di un trasduttore è la loro funzionalità. Qui tutto è semplice: lo statore (motore elettrico o generatore) è una parte fissa, il rotore è mobile. Nella maggior parte dei casi, quest'ultimo si trova all'interno del primo e c'è un piccolo spazio tra di loro. Esistono le cosiddette unità con un rotore esterno, che è un anello rotante, all'interno del quale è presente uno statore fisso.
I motori elettrici sono macchine che convertono energia elettrica in energia meccanica. L'energia viene sprecata in calore Joule, correnti di Foucault, isteresi, scintille, ecc. ogni motore elettrico è costituito da una parte fissa detta statore e da una parte mobile detta rotore o armatura che ruota all'interno dello statore. saltare elettricità attraverso l'avvolgimento dello statore e l'avvolgimento del rotore si formano due campi magnetici, che interagiscono tra loro con forze attrattive e repulsive, in modo che il rotore ruoti.
I motori elettrici asincroni sono tra i motori più utilizzati. Lo statore ha la forma di un cilindro cavo, costituito da lastre speciali di circa 0,5 mm di spessore, che sono isolate con vernice o vernice. Nelle scanalature situate attorno alla periferia dello statore è previsto un isolamento a tre giri di conduttori isolati in rame o alluminio, attraverso il quale scorre una corrente alternata trifase. Il rotore è costituito dalle stesse piastre e ha la forma di un cilindro pieno. Sulla sua superficie sono presenti scanalature e viene inserito un avvolgimento trifase, simile all'avvolgimento dello statore, oppure nelle scanalature vengono inserite barre di rame nude, che sono collegate ad entrambe le estremità con anelli di rame.
Tipi di convertitori
Perché è così importante considerare le viste per capire in che modo lo statore di un motore elettrico differisce dalla sua parte mobile. Il punto è questo caratteristiche del progetto i motori elettrici ne hanno molto, lo stesso vale per i generatori (questi sono convertitori energia meccanica in elettrico, i motori elettrici hanno la funzionalità opposta).
Gli avvolgimenti dell'ancora sono costituiti da barre metalliche altamente conduttive, che vengono fissate per breve tempo alle estremità dell'ancora. L'avvolgimento ricorda una gabbia ed è indicato come un'ancora o ancora. Il campo magnetico rotante dello statore provoca correnti significative nell'avvolgimento dell'ancora. Secondo la legge di Lenz, ci sono forze magnetiche agendo sui conduttori dell'ancora, e l'ancora ruota nel senso di rotazione campo magnetico. Tuttavia, il rotore non può ruotare alla stessa frequenza del campo. Diciamo che ha una netta mancanza.
Tuttavia, con l'aumento della velocità del rotore, la differenza tra la velocità del rotore e il campo magnetico rotante diminuirà gradualmente, ma ridurrà anche la velocità di attraversamento della fune delle linee induttive, riducendo così la corrente indotta e gli effetti della forza del magnetico rotante campo e la velocità del rotore da un certo momento non aumenterà più. Il rotore non funziona parallelamente al campo magnetico rotante.

Quindi, i motori elettrici sono divisi in AC e corrente continua. I primi, a loro volta, si dividono in sincroni, asincroni e collettori. Per il primo, la velocità angolare di rotazione dello statore e del rotore sono uguali. Nel secondo, questi due indicatori sono disuguali. Nei tipi di collettore, è presente un cosiddetto convertitore di frequenza e il numero di fasi di un tipo meccanico nel progetto, chiamato collettore. Da qui il nome dell'unità. È lui che è direttamente collegato agli avvolgimenti del rotore del motore e del suo statore.
Animazione di trifase motore a induzione. L'alluminio non è un materiale ferromagnetico, quindi la sua rotazione non può essere spiegata allo stesso modo della rotazione di un magnete. In un campo magnetico rotante, diverse tensioni vengono indotte in diverse parti del cilindro di alluminio. I cilindri iniziano ad essere soggetti alle cosiddette correnti parassite, che in un campo magnetico rotante creano una forza che fa ruotare il cilindro. Questo è maggiore, maggiore è la velocità del motore è inferiore alla velocità del campo magnetico rotante.
Per questo motivo si tratta di un motore a induzione il cui motore non ha una velocità sincrona. La sua velocità varia a seconda del carico. Cambiando i fili bifase nei terminali del motore, il senso di rotazione del campo rotante viene invertito e il motore ruota in senso opposto. In base alla progettazione, i motori a induzione possono essere modificati in motori a induzione monofase, adatti per piccoli elettrodomestici come lavatrici.
Le macchine DC sul rotore hanno lo stesso collettore. Ma nel caso dei generatori svolge le funzioni di convertitore e, nel caso dei motori elettrici, le funzioni di inverter.
Se un'unità elettrica è una macchina in cui ruota solo il rotore, il suo nome è unidimensionale. Se due elementi ruotano in direzioni opposte contemporaneamente, questo apparato è chiamato bidimensionale o birotativo.
La grande importanza pratica delle correnti trifase permette di progettare motori elettrici semplici e potenti che convertono l'energia elettrica in energia meccanica. Si basano sul movimento dei conduttori attraverso i quali passa una corrente elettrica in un campo magnetico, che è guidato da una corrente nell'avvolgimento dello statore.
Consideriamo la situazione in Fig. Tre bobine i cui assi sono ad angolo l'uno rispetto all'altro e i cui avvolgimenti sono collegati a una stella. Queste bobine sono collegate alla tensione trifase da un'altra fonte. La corrente che passa attraverso le bobine crea un campo magnetico tra di loro. Se mettiamo un magnete in questo campo, inizierà a ruotare alla stessa frequenza della corrente alternata. Il magnete ruota in modo sincrono con il campo magnetico. La rotazione di un campo magnetico è un campo magnetico il cui vettore di induzione magnetica cambia periodicamente. C'è un campo magnetico rotante qui.
Motori asincroni
Per comprendere i concetti del rotore del motore e del suo statore, è necessario considerare uno dei tipi di macchine elettriche di conversione. Poiché i motori elettrici asincroni sono utilizzati più spesso nelle apparecchiature di produzione e elettrodomestici, allora vale la pena prenderli in considerazione.

Il punto finale del vettore di induzione magnetica si muove in un cerchio. Sulla fig. 186 mostra la temporizzazione della corrente della bobina nella parte superiore e inferiore del campo magnetico rotante. Allo stesso modo, puoi trovare la direzione delle linee di induzione in altri punti temporali. Motore elettrico trifase ha due parti principali.
Statore: ha un design simile allo statore del generatore. Rotore: un cilindro di lamiere di acciaio scanalate in cui sono installati gli avvolgimenti. Viene utilizzato un cosiddetto avvolgimento separatore, che viene creato, ad esempio, versando alluminio fuso nelle scanalature. La sua solidificazione crea una gabbia conduttiva di robuste aste di alluminio, che sono collegate alla testa del rotore con anelli di alluminio. L'avvolgimento dell'ancora ha una resistenza trascurabile e un motore con questo tipo di rotore è chiamato motore a manica corta.
Allora cos'è un motore asincrono? Di solito si tratta di una custodia in ghisa in cui viene premuto il circuito magnetico. Al suo interno sono realizzate scanalature speciali, dove si inserisce l'avvolgimento dello statore, assemblato con filo di rame. Le scanalature sono spostate l'una rispetto all'altra di 120º, quindi ce ne sono solo tre. Formano tre fasi.
Il rotore, a sua volta, è un cilindro assemblato da lamiere di acciaio (acciaio elettrico stampato) e montato su un albero in acciaio, che, a sua volta, è installato nei cuscinetti durante l'assemblaggio del motore elettrico. A seconda di come sono assemblati gli avvolgimenti di fase dell'unità, i rotori del motore possono essere in fase o cortocircuitati.
Non ci sono conduttori per il rotore. Questo rotore è come una gabbia per Ježek in una gabbia, un mistero che appare nei libri di Jaroslav Fogla. A causa della piccola resistenza dell'ancora, il campo magnetico rotante induce grandi correnti nell'avvolgimento. Ciò si traduce in una grande forza magnetica che fa ruotare il rotore. Tuttavia, l'armatura non ruota alla frequenza del campo magnetico rotante. Se così fosse, non vi sarebbe alcuna variazione del flusso magnetico dell'avvolgimento indotto dalla corrente e quindi la causa della rotazione scomparirebbe.
È necessario che l'armatura si muova rispetto al campo magnetico rotante, ad es. "Senti" un campo magnetico non stazionario. Se ruotava in modo sincrono, "percepiva" il campo stazionario. Se un magnete viene utilizzato come rotore, si verifica una rotazione sincrona per creare un motore sincrono.
- Un rotore di fase è un cilindro su cui sono assemblate le bobine, spostate l'una rispetto all'altra di 120º. Allo stesso tempo, nel suo design sono installati tre collettori rotanti, che non entrano in contatto né con l'albero né tra loro. Da un lato, le estremità di tre avvolgimenti sono fissate agli anelli e, dall'altro, spazzole di grafite, che sono in contatto scorrevole rispetto agli anelli. Un esempio di tale macchina sono i motori delle gru con un rotore di fase.
- Il rotore a gabbia di scoiattolo è assemblato da barre di rame che si inseriscono nelle scanalature. Allo stesso tempo, sono collegati da uno speciale anello in rame.
Contrariamente alla rotazione sincrona del magnete, l'ancora trifase del motore elettrico ruota sempre ad una frequenza inferiore, la cosiddetta asincrona. Questi motori sono chiamati motori asincroni trifase. Il valore caratteristico di motore asincrono, è chiamato scorrimento c ed è determinato dal rapporto in cui la velocità di rotazione del mg rotante. campo e velocità del rotore. Lo slittamento può essere espresso in percentuale.
Se l'indotto non supera alcuna resistenza durante la rotazione, cioè quando il dispositivo è in modalità standby, lo scorrimento è piccolo e l'avvolgimento dell'ancora passa attraverso una piccola corrente. Quando il motore è carico, lo scorrimento aumenta, l'avvolgimento induce più corrente e la rotazione del rotore viene mantenuta con maggiore forza magnetica.
Contrariamente alla rotazione sincrona del magnete, l'ancora trifase del motore elettrico ruota sempre ad una frequenza inferiore, la cosiddetta asincrona. Questi motori sono chiamati motori asincroni trifase. Il valore caratteristico di un motore elettrico asincrono si chiama scorrimento c ed è determinato dal rapporto in cui la velocità di rotazione del mg rotante. campo e velocità del rotore. Lo slittamento può essere espresso in percentuale.
Il motore elettrico asincrono con rotore di fase è proprietario di grandi dimensioni e peso. Ma ha eccellenti proprietà per quanto riguarda l'avviamento e la regolazione delle coppie. I motori con rotore a gabbia di scoiattolo sono considerati i più affidabili oggi. Sono semplici nel design e quindi sono economici. Il loro unico inconveniente è la grande corrente di spunto, che ora viene contrastata collegando gli avvolgimenti dello statore da una stella a un delta. Cioè, l'inizio viene effettuato quando collegato da una stella, dopo una serie di rivoluzioni, viene effettuato un passaggio a un delta.
Articoli correlati: 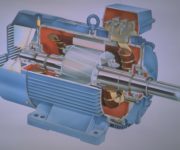
Avvolgimento di un prodotto elettrico (dispositivo) - un insieme di spire o bobine disposte in un certo modo e collegate, progettate per creare o utilizzare un campo magnetico o per ottenere un determinato valore di resistenza di un prodotto elettrico (dispositivo).Bobina di avvolgimento di un prodotto elettrico (dispositivo) - un avvolgimento di un prodotto elettrico (dispositivo) o parte di esso, realizzato come unità strutturale separata(GOST 18311-80).
L'articolo parla del dispositivo degli avvolgimenti dello statore e del rotore macchine elettriche corrente alternata.
Uno statore con dodici cave, ciascuna delle quali contiene un conduttore, è schematicamente mostrato in Fig. 1, a. I collegamenti tra conduttori posati in scanalature sono indicati solo per una delle tre fasi; l'inizio delle fasi A, B, C dell'avvolgimento è indicato con C1, C2, C3; finisce - C4, C5, C6. Le parti dell'avvolgimento posate nelle scanalature (la parte attiva dell'avvolgimento) sono convenzionalmente mostrate sotto forma di aste e le connessioni tra i conduttori nelle scanalature (connessioni terminali) sono mostrate come una linea continua.
Il nucleo dello statore ha la forma di un cilindro cavo, che è un pacco o una serie di pacchi (separati da condotti di ventilazione) da lamiere di acciaio elettrico. Per le macchine di piccola e media potenza, ogni foglio è stampato a forma di anello con scanalature lungo la circonferenza interna. Sulla fig. 1b mostra un foglio statorico con scanalature di una delle forme utilizzate.
Riso. 1. La posizione dell'avvolgimento nelle fessure dello statore e la distribuzione delle correnti nei conduttori
Lascia che il valore istantaneo della corrente iA della prima fase in un determinato momento sia massimo e la corrente sia diretta dall'inizio della fase C1 alla sua fine C4. Considereremo questa corrente positiva.
Definindo le correnti istantanee nelle fasi come proiezioni di vettori rotanti sull'asse fisso ON (Fig. 1, c), troviamo che le correnti delle fasi B e C sono negative in un dato momento, cioè sono dirette dai capi dalle fasi agli inizi.
Seguiamo la Fig. 1, d formazione di un campo magnetico rotante. Al momento considerato, la corrente della fase A è diretta dall'inizio alla fine, cioè se nei conduttori 1 e 7 va da noi oltre il piano del disegno, allora nei conduttori 4 e 10 va da dietro il piano del disegno a noi (vedi Fig. 1, aed).
Nella fase B, la corrente in questo momento va dalla fine della fase al suo inizio. Collegando i conduttori della seconda fase secondo il modello della prima, si ottiene che la corrente della fase B attraversi i conduttori 12, 9, 6, 3; allo stesso tempo, attraverso i conduttori 12 e 6, la corrente scorre da noi oltre il piano del disegno e attraverso i conduttori 9 e 3 - verso di noi. Il quadro della distribuzione delle correnti nella fase C sarà ottenuto secondo il campione della fase B.
Le direzioni delle correnti sono riportate in fig. 1,d; le linee tratteggiate mostrano le linee magnetiche del campo creato dalle correnti dello statore; le direzioni delle linee sono determinate dalla regola della vite destra. Dalla figura si può vedere che i conduttori formano quattro gruppi con le stesse direzioni di corrente e il numero di poli 2p del sistema magnetico è quattro. Le aree dello statore in cui escono le linee magnetiche sono i poli nord e le aree in cui le linee magnetiche entrano nello statore sono i poli sud. L'arco del cerchio dello statore, occupato da un polo, è chiamato divisione dei poli.
Il campo magnetico in diversi punti della circonferenza dello statore è diverso. Il quadro della distribuzione del campo magnetico lungo la circonferenza dello statore viene ripetuto periodicamente dopo ogni divisione bipolare 2τ; l'angolo d'arco 2τ è preso come 360 gradi elettrici. Poiché ci sono p divisioni bipolari lungo la circonferenza dello statore, 360 gradi geometrici equivalgono a 360p gradi elettrici e un grado geometrico è uguale a p gradi elettrici.
Sulla fig. 1d mostra le linee magnetiche per un determinato momento di tempo. Se consideriamo l'immagine del campo magnetico per un numero di istanti successivi, possiamo vedere che il campo ruota a velocità costante.
Troviamo la velocità di rotazione del campo. Dopo un tempo pari alla metà del periodo della corrente alternata, le direzioni di tutte le correnti cambiano in senso opposto, quindi i poli magnetici cambiano posizione, cioè a metà del periodo il campo magnetico ruota di una parte del giro pari a 1 /2ρ. In un periodo di corrente alternata, il campo ruota di 1/ρ di giro. Quindi in un secondo il campo compie 1/ρ giri, dove f è la frequenza della corrente alternata. Pertanto, la velocità di rotazione del campo magnetico dello statore, cioè la velocità sincrona, è (in giri al minuto)
Il numero p di coppie polari può essere solo intero, quindi ad una frequenza di, ad esempio, 50 Hz, la velocità sincrona può essere 3000; 1500; 1000 giri/min, ecc.
Riso. 2. Schema dettagliato di un avvolgimento monostrato trifase
Una grandezza caratteristica che determina le prestazioni dell'avvolgimento è il numero di cave per polo e fase, ovvero il numero di cave occupate dall'avvolgimento di ciascuna fase all'interno di una divisione di poli:
dove z è il numero di slot dello statore.
L'avvolgimento mostrato in fig. 1a ha i seguenti dati:
Anche per questo avvolgimento più semplice, il disegno spaziale dei conduttori e dei loro collegamenti risulta complesso, per cui viene solitamente sostituito da un diagramma espanso, dove i conduttori degli avvolgimenti sono mostrati non su una superficie cilindrica, ma su un piano (a superficie cilindrica con scanalature e un avvolgimento si "spiega" in un piano). Sulla fig. 2, e viene fornito un diagramma dettagliato dell'avvolgimento dello statore considerato.
Nella figura precedente, per semplicità, è stato mostrato che parte della fase A dell'avvolgimento, posta nelle scanalature 1 e 4, è costituita da due soli conduttori, cioè da un giro. In realtà, ciascuna di queste parti dell'avvolgimento per un polo è costituita da w spire, cioè ogni coppia di fessure contiene w conduttori combinati in una bobina. Pertanto, quando si bypassa in uno schema esteso, ad esempio la fase A dallo slot 1, è necessario bypassare gli slot 1 e 4 w volte prima di passare allo slot 7. La distanza tra i lati del giro di una bobina o l'avvolgimento passo, y è mostrato in fig. 1, d; di solito è espresso in numero di slot.
Riso. 3. Scudo macchina asincrona
Mostrato in fig. 1 e 2, l'avvolgimento dello statore è chiamato a strato singolo, poiché si adatta a ciascuna scanalatura in uno strato. Per posizionare le parti frontali che si intersecano sul piano, queste vengono piegate lungo diverse superfici (Fig. 2, b). Gli avvolgimenti monostrato sono realizzati con un passo pari alla divisione dei poli y = τ: (Fig. 2, a), oppure questo passo è uguale alla divisione media dei poli per bobine diverse della stessa fase, se y > 1 , y . Attualmente, gli avvolgimenti a doppio strato sono più comuni.
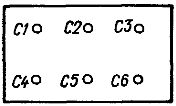
L'inizio e la fine di ciascuna delle tre fasi dell'avvolgimento sono visualizzate sullo scudo della macchina, dove sono presenti sei pinze (Fig. 3). Tre fili lineari da rete trifase. I morsetti inferiori C4, C5, C6 (estremità di fase) sono collegati in un punto da due ponticelli orizzontali, oppure ciascuno di questi morsetti è collegato da un ponticello verticale al morsetto superiore che si trova sopra di esso.
Nel primo caso le tre fasi dello statore formano un collegamento a stella, nel secondo caso un collegamento a triangolo. Se, ad esempio, una fase dello statore è progettata per una tensione di 220 V, allora tensione di linea la rete in cui è collegato il motore deve essere 220 V se lo statore è acceso da un triangolo; quando viene acceso da una stella, la tensione di linea della rete deve essere
![]()
Quando si collega lo statore con una stella, il filo neutro non viene fornito, poiché il motore è un carico simmetrico per la rete.
Il rotore di una macchina asincrona è assemblato da lamiere stampate di acciaio elettrico isolato su un albero o su una speciale struttura di supporto. Lo spazio radiale tra lo statore e il rotore è ridotto al minimo per garantire una bassa resistenza magnetica nel percorso del flusso magnetico che penetra in entrambe le parti della macchina.
Il minimo divario consentito dai requisiti tecnologici va da decimi di millimetro a diversi millimetri, a seconda della potenza e delle dimensioni della macchina. I conduttori dell'avvolgimento del rotore sono posti in scanalature lungo le generatrici del rotore direttamente sulla sua superficie in modo da garantire la massima connessione tra l'avvolgimento del rotore e il campo rotante.
Vengono prodotte macchine asincrone sia con fase che con rotore a gabbia di scoiattolo.

Riso. 4. Rotore di fase
Il rotore di fase ha, di regola, avvolgimento trifase, eseguito, come uno statore, con lo stesso numero di poli. L'avvolgimento è collegato da una stella o da un triangolo; le tre estremità dell'avvolgimento sono portate fuori da tre collettori rotanti isolati che ruotano con l'albero della macchina. Attraverso le spazzole montate sulla parte fissa della macchina e scorrevoli lungo gli anelli collettori, nel rotore viene inserito un reostato di avviamento o regolazione trifase, ovvero in ogni fase del rotore viene introdotta una resistenza attiva. Aspetto esteriore il rotore di fase è mostrato in fig. 4, sono visibili tre collettori rotanti sull'estremità sinistra dell'albero. I motori asincroni con rotore di fase vengono utilizzati laddove è richiesto un controllo regolare della velocità del meccanismo di azionamento, nonché con frequenti avviamenti del motore sotto carico.
Il design di un rotore a gabbia di scoiattolo è molto più semplice di quello di un rotore di fase. Per una delle strutture di Fig. 5, a mostra la forma delle lastre da cui è assemblato il nucleo del rotore. In questo caso, i fori in prossimità della circonferenza esterna di ciascuna lastra formano scanalature longitudinali nell'anima. L'alluminio viene versato in queste scanalature, dopo che si è indurito, nel rotore si formano barre conduttive longitudinali. Ad entrambe le estremità del rotore, gli anelli di alluminio sono fusi contemporaneamente, cortocircuitando le aste di alluminio. Il sistema conduttivo risultante è solitamente chiamato gabbia di scoiattolo.
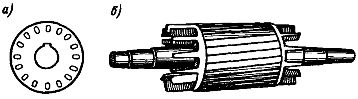
Riso. 5. Rotore a gabbia di scoiattolo
Il rotore a gabbia di scoiattolo è mostrato in fig. 5B. Alle estremità del rotore sono visibili lame di ventilazione, fuse integralmente con gli anelli di cortocircuito. In questo caso, le fessure sono smussate di una divisione di fessure lungo il rotore. La gabbia di scoiattolo è semplice, non ha contatti striscianti, quindi i motori asincroni trifase con rotore a gabbia di scoiattolo sono i più economici, i più semplici e i più affidabili; sono i più comuni.
Ti consigliamo di leggere
 Caratteristiche psicologiche dei bambini in adolescenza
Caratteristiche psicologiche dei bambini in adolescenza Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola
Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa

