Algoritmo de controlador PID discreto simple
Compatible con todos los microcontroladores AVR
La función PID usa 534 bytes de memoria flash y 877 ciclos de procesador (IAR - optimización de tamaño bajo)
1. Introducción
Este manual describe una implementación simple de un controlador discreto proporcional-integral-derivativo (PID).
Cuando se trabaja con aplicaciones donde la señal de salida del sistema debe cambiar de acuerdo con el valor de referencia, se requiere un algoritmo de control. Ejemplos de tales aplicaciones son una unidad de control de motor, una unidad de control de temperatura, presión, flujo de fluido, velocidad, fuerza u otras variables. El controlador PID se puede utilizar para controlar cualquier variable medida.
Muchas soluciones se han utilizado en el campo del control durante mucho tiempo, pero los controladores PID pueden convertirse en el "estándar de la industria" debido a su simplicidad y buen rendimiento.
Para recibir Información Adicional para los controladores PID y sus aplicaciones, el lector debe consultar otras fuentes, como PID Controllers de K. J. Astrom & T. Hagglund (1995)
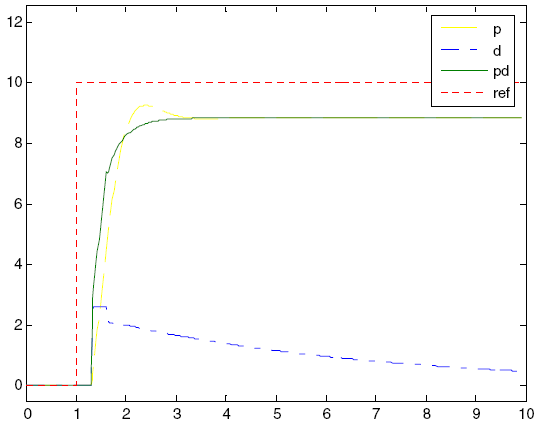
Figura 1-1. Respuestas típicas de un controlador PID a un cambio de paso en la señal de referencia
2. Controlador PID
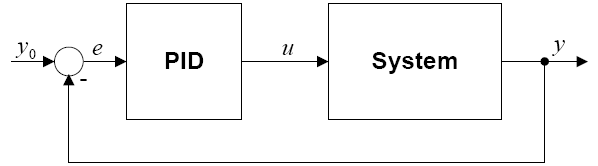
La Figura 2-1 muestra un diagrama de un sistema con un controlador PID. El controlador PID compara el valor de proceso medido Y con un valor de referencia dado Y0. La diferencia, o error, E, luego se procesa para calcular un nuevo proceso de entrada, U. Este nuevo proceso de entrada intentará acercar el valor del proceso medido al valor especificado.
Una alternativa a un sistema de control de bucle cerrado es un sistema de control de bucle abierto. Un lazo de control abierto (sin retroalimentación) no es satisfactorio en muchos casos, y su aplicación es a menudo imposible debido a las propiedades del sistema.
Figura 2-1. Sistema de control de lazo cerrado PID
A diferencia de los algoritmos de control simples, un controlador PID puede controlar un proceso en función de su historial y tasa de cambio. Esto proporciona un método de control más preciso y estable.
La idea principal es que el controlador reciba información sobre el estado del sistema mediante un sensor. Luego resta el valor medido del valor de referencia para calcular el error. El error se manejará de tres maneras: manejar el tiempo presente por el término proporcional, volver al pasado usando el término integral y anticipar el futuro usando el término diferencial.
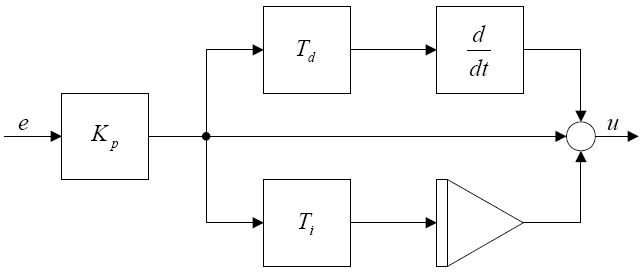
La figura 2-2 muestra el diagrama de circuito de un controlador PID, donde Tp, Ti y Td son las constantes de tiempo proporcional, integral y derivada, respectivamente.
Figura 2-2. Diagrama del controlador PID
2.1 Proporcional
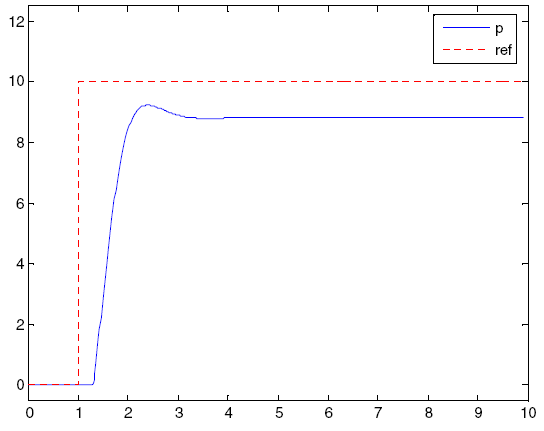
El término proporcional (P) da una señal de control proporcional al error calculado. El uso de un solo control proporcional siempre da un error estacionario, excepto cuando la señal de control es cero y el valor del proceso del sistema es igual al valor requerido. En la fig. 2-3, aparece un error estacionario en el valor del proceso del sistema después de un cambio en la señal de referencia (ref). Usar un término P demasiado grande dará como resultado un sistema inestable.Figura 2-3. Respuesta del controlador P a un cambio de paso en la señal de referencia
2.2 Término integral
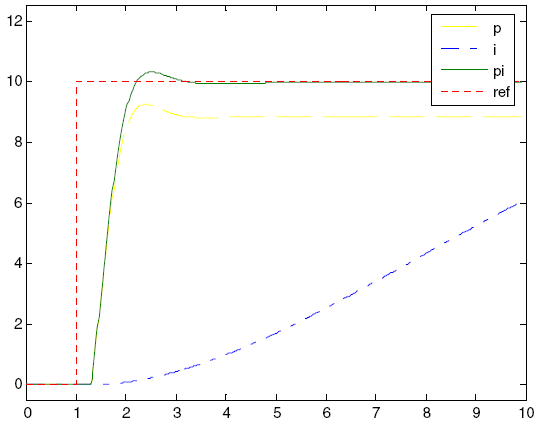
La componente integral (I) representa los errores anteriores. La suma del error continuará hasta que el valor del proceso del sistema sea igual al valor deseado. Habitualmente, la componente integral se utiliza junto con la componente proporcional, en los denominados controladores PI. Usar solo el componente integral da una respuesta lenta y, a menudo, un sistema oscilante. La Figura 2-4 muestra la respuesta escalonada de los controladores I y PI. Como puede ver, la respuesta del controlador PI no tiene error estacionario y la respuesta del controlador I es muy lenta.
Figura 2-4. La respuesta del controlador I- y PI a un cambio de paso en el valor controlado
2.3 Término derivado
El término diferencial (D) es la tasa de cambio del error. La adición de este componente mejora la respuesta del sistema ante un cambio repentino de su estado. El término diferencial D generalmente se usa con algoritmos P o PI, como controladores PD o PID. Un gran componente diferencial D generalmente da un sistema inestable. La Figura 2-5 muestra las respuestas del controlador D y PD. La respuesta del controlador PD proporciona un aumento más rápido en el valor del proceso que el controlador P. Tenga en cuenta que el término diferencial D se comporta esencialmente como un filtro de paso alto para la señal de error y, por lo tanto, hace que el sistema sea fácilmente inestable y más susceptible al ruido.
Figura 2-5. Respuesta del controlador D y PD a un cambio de paso en la señal de referencia
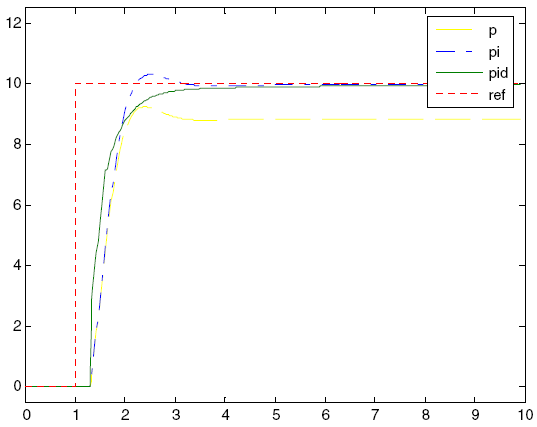
El controlador PID ofrece el mejor rendimiento porque utiliza todos los componentes juntos. La Figura 2-6 compara los controladores P, PI y PID. PI mejora P eliminando el error estacionario y PID mejora PI con una respuesta más rápida.
Figura 2-6. Respuesta del controlador P, PI y PID a un cambio de paso en la señal de referencia
2.4. Ajustes
La mejor manera de encontrar los parámetros requeridos del algoritmo PID es usar un modelo matemático del sistema. Sin embargo, a menudo no existe una descripción matemática detallada del sistema y la configuración de los parámetros del controlador PID solo se puede realizar de forma experimental. Encontrar parámetros para un controlador PID puede ser una tarea abrumadora. Aquí gran importancia tener datos sobre las propiedades del sistema y varias condiciones su trabajo. Algunos procesos no deberían permitir que la variable de proceso sobrepase el punto de ajuste. Otros procesos deberían minimizar el consumo de energía. También el requisito más importante es la estabilidad. El proceso no debe fluctuar bajo ninguna circunstancia. Además, la estabilización debe ocurrir dentro de un tiempo determinado.
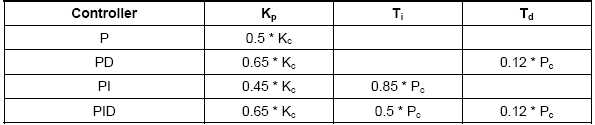
Hay algunos métodos para ajustar el controlador PID. La elección del método dependerá en gran medida de si el proceso puede estar fuera de línea para el ajuste o no. El método Ziegler-Nichols es un método de ajuste no fuera de línea muy conocido. El primer paso en este método es establecer las ganancias I y D en cero, aumentando la ganancia P a una oscilación constante y estable (lo más cercana posible). Luego se registra la ganancia crítica Kc y el período de oscilación Pc y se corrigen los valores de P, I y D utilizando la Tabla 2-1.
Tabla 2-1. Cálculo de parámetros según el método de Ziegler-Nichols
A menudo es necesario ajustar más los parámetros para optimizar el rendimiento de un controlador PID. El lector debe notar que hay sistemas donde un controlador PID no funcionará. Estos pueden ser sistemas no lineales, pero en general, a menudo surgen problemas con el control PID cuando los sistemas son inestables y el efecto de la señal de entrada depende del estado del sistema.
2.5. Controlador PID discreto
El controlador PID discreto leerá el error, calculará y emitirá la señal de control para el tiempo de muestreo T. El tiempo de muestreo debe ser menor que la constante de tiempo más pequeña del sistema.
2.5.1. Descripción del algoritmo
A diferencia de los algoritmos de control simples, el controlador PID puede manipular la señal de control en función del historial y la tasa de cambio de la señal medida. Esto proporciona un método de control más preciso y estable.
La figura 2-2 muestra el diseño del circuito del controlador PID, donde Tp, Ti y Td son las constantes de tiempo proporcional, integral y derivada, respectivamente.
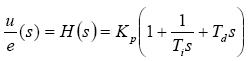
La función de transferencia del sistema que se muestra en la Figura 2-2 es:
Aproximamos las componentes integral y diferencial para obtener una forma discreta
Para evitar que este cambio en el valor del proceso de referencia genere cambios rápidos no deseados en la entrada de control, el controlador mejora basándose únicamente en el término derivado de los valores del proceso:
3. Implementación de un controlador PID en C
Se adjunta a este documento una aplicación funcional en C. Se puede encontrar una descripción completa del código fuente y la información de compilación en el archivo "readme.html".
Figura 3-1. Diagrama de flujo de la aplicación de demostración
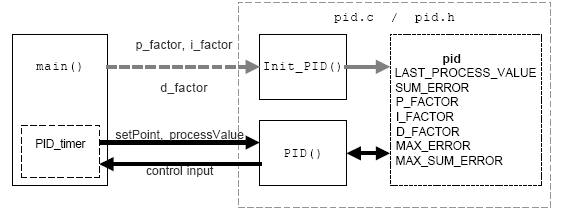
La Figura 3-1 muestra un diagrama simplificado de la aplicación de demostración.
El controlador PID utiliza una estructura para almacenar su estado y parámetros. Esta estructura se inicializa mediante la función principal y solo se pasa un puntero a las funciones Init_PID() y PID().
La función PID() debe llamarse para cada intervalo de tiempo T, esto lo establece un temporizador que establece el indicador PID_timer cuando ha transcurrido el tiempo de muestra. Cuando se establece el indicador PID_timer, el programa principal lee el valor de referencia del proceso y el valor del sistema del proceso, llama a la función PID() y envía el resultado a la entrada de control.
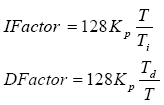
Para aumentar la precisión, p_factor, i_factor y d_factor se incrementan 128 veces. El resultado del algoritmo PID se reduce luego dividiéndolo por 128. El valor de 128 se usa para proporcionar una optimización de la compilación.
![]()
Además, la influencia de Ifactor y Dfactor dependerá del tiempo T.
3.1. liquidación integral
Cuando el proceso de entrada, U, alcanza un valor lo suficientemente alto, se vuelve acotado. Ya sea por el rango numérico interno del controlador PID, o por el rango de salida del controlador, o suprimido en los amplificadores. Esto sucederá si hay una diferencia lo suficientemente grande entre el valor medido y el valor de referencia, generalmente porque el proceso tiene más perturbaciones de las que el sistema puede manejar.
Si el controlador usa un término integral, esta situación puede ser problemática. En tal situación, el término integral se sumará constantemente, pero en ausencia de grandes violaciones, el controlador PID comenzará a compensar el proceso hasta que la suma integral vuelva a la normalidad.
Este problema se puede resolver de varias maneras. En este ejemplo, la suma integral máxima está limitada y no puede ser mayor que MAX_I_TERM. Talla correcta MAX_I_TERM dependerá del sistema.
4. Mayor desarrollo
El controlador PID presentado aquí es un ejemplo simplificado. El controlador debería funcionar bien, pero algunas aplicaciones pueden requerir que el controlador sea aún más confiable. Puede ser necesario agregar una corrección de saturación en el término integral, con base en el término proporcional solo en el valor del proceso.
En el cálculo de Ifactor y Dfactor, el tiempo de muestreo T es parte de la ecuación. Si el tiempo de muestreo T utilizado es mucho menor o mayor que 1 segundo, la precisión de Ifactor o Dfactor será insuficiente. Es posible reescribir el PID y el algoritmo de escalado para preservar la precisión de los términos integral y diferencial.
5. Literatura de referencia
K. J. Astrom & T. Hagglund, 1995: Controladores PID: teoría, diseño y ajuste.
Sociedad Internacional para la Medición y Con.
6. Archivos
AVR221.rarTraducido por Kirill Vladimirov a pedido
Conferencia 30Implementación de controlador PID y filtrado digital en controladores
Los controladores de microprocesador permiten implementar controladores tanto discretos como analógicos, así como controladores no lineales y autoajustables. El principal problema del control digital es encontrar la estructura adecuada del controlador y sus parámetros. La implementación de software de algoritmos de control para estos parámetros suele ser una tarea relativamente sencilla.
Cada regulador también debe incluir medios de protección que impidan el desarrollo peligroso del proceso bajo la acción del regulador en situaciones de emergencia.
Muchos TP se caracterizan por varios parámetros de entrada y salida. A menudo, las conexiones internas y la interacción de las señales respectivas no son críticas y el proceso se puede controlar con un conjunto de controladores simples, y cada lazo se usa en sistemas de control digital directo.
Los reguladores lineales con una entrada/salida se pueden representar de forma generalizada
donde tu es la salida del controlador (variable de control), tu Con es el valor establecido, y a– señal de salida del proceso (variable controlada). Parámetro PAG representa el orden del regulador.
Un controlador PID ordinario puede considerarse como un caso especial de un controlador discreto generalizado con PAG= 2.
Considere un regulador que consta de dos partes: un circuito de retroalimentación (retroalimentación) GRAMO Facebook (s) que maneja el error mi , y bucle feedforward GRAMO FF (s), que controla los cambios en la acción de configuración y agrega un término de corrección a la señal de control para que el sistema responda más rápidamente a los cambios en la configuración. Para este controlador, la acción de control tu (s ) es la suma de dos señales
Esta expresión se puede reescribir como
donde tu F 1 (s) es una señal preventiva basada en el valor de referencia (acción de ajuste), una tu F 2 (s) es una señal de retroalimentación.
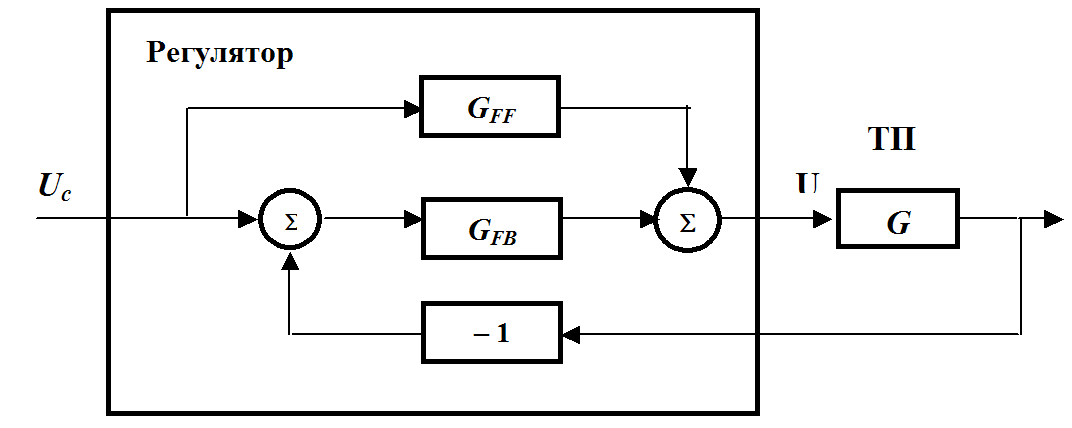
Figura 30.1.Un controlador que contiene un lazo de control anticipativo basado en un valor de referencia (punto de referencia) y un lazo de retroalimentación basado en la salida del proceso a
El controlador tiene dos señales de entrada. tu C (s) y Y(s) y, por lo tanto, puede ser descrita por dos funciones de transferencia GRAMO F 1 (s) y GRAMO R (s).
|
|
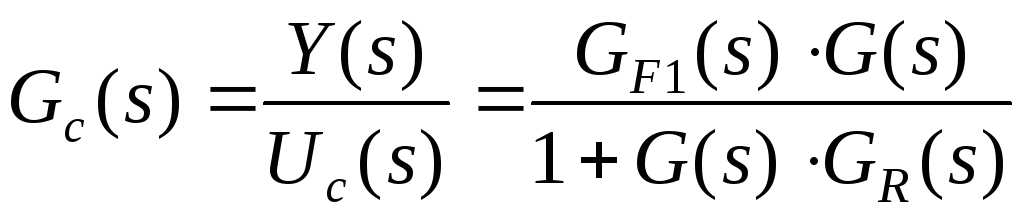
Dado que el controlador con PF (30.3) tiene debido a GRAMO F 1 (s) coeficientes más ajustables que un regulador convencional, entonces el sistema de control cerrado tiene mejores características.
La posición de los polos del sistema de retroalimentación se puede cambiar usando el regulador GRAMO R (s), y el controlador de avance GRAMO F 1 (s) añade nuevos ceros al sistema. Por lo tanto, el sistema de control puede responder rápidamente a los cambios en la señal de la tarea si GRAMO F 1 (s) se elige correctamente.
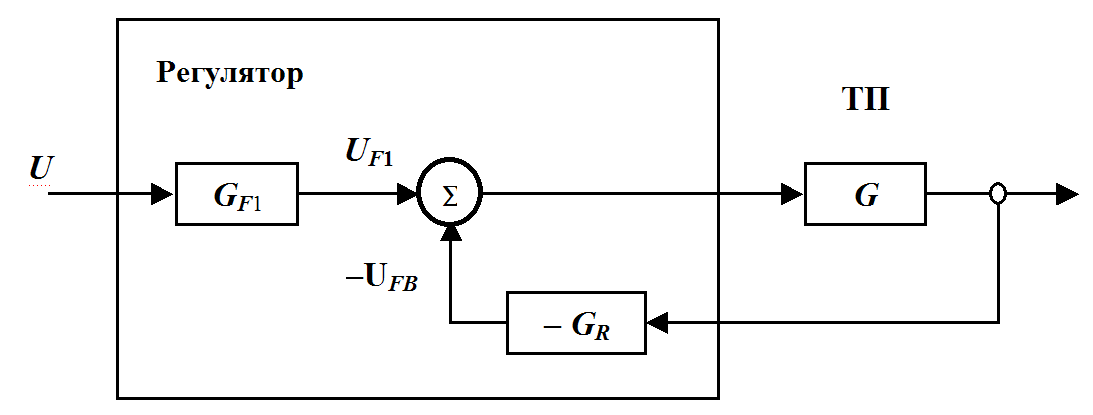
Figura 30.2. Estructura de un regulador lineal con control feedforward y realimentación
Gracias al uso de un controlador de este tipo, es posible crear sistemas de control (servo) de alta precisión mediante accionamientos eléctricos, robots o máquinas herramienta. Para ellos, es importante que la respuesta a la salida del proceso sea rápida y precisa ante cualquier cambio en la referencia.
Si el numerador y el denominador del PF GRAMO R (s), y GRAMO F 1 (s) en (23.3) para expresarse mediante polinomios en s , entonces la descripción del controlador después de las transformaciones se puede representar de la siguiente forma
GRAMO 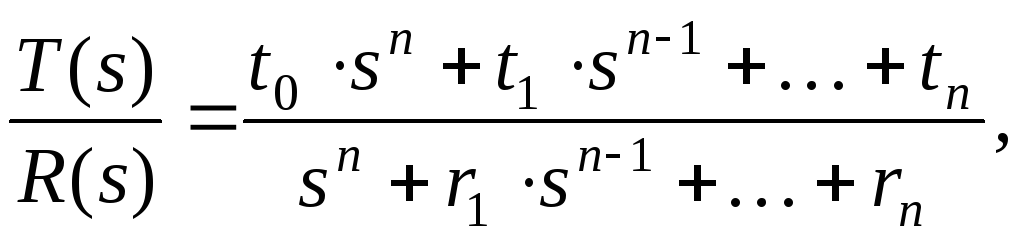
 Delaware
Delaware
r i ,s i ,t i – parámetros de polinomios PF, s– Operador de Laplace.
El controlador correspondiente a la ecuación (30.4) se puede representar como un controlador generalizado (generalcontroller)
El FP del proceso se puede expresar como
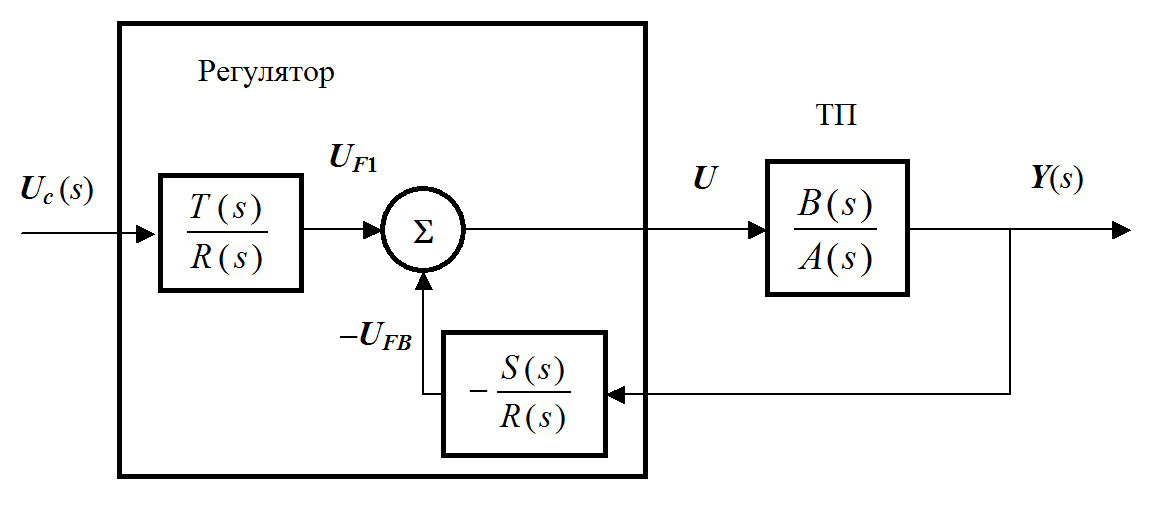
Figura 30.3. La estructura de un controlador lineal con control anticipativo y retroalimentación en forma de PF
Si R(s),S(s) y T(s) tienen un orden suficientemente alto, es decir, un número suficiente de "perillas de sintonización", el FP de un sistema cerrado se puede variar en un amplio rango. Orden del regulador PAG debe ser el mismo que el proceso original. si, recogiendo R(s) y S(s), uno puede cambiar arbitrariamente el denominador del FP de un sistema cerrado. En teoría, esto significa que los polos de un sistema cerrado se pueden desplazar a cualquier lugar del plano complejo. (En la práctica, la amplitud máxima y la velocidad de cambio de la señal de control limitan la libertad de movimiento de los polos).
Como resultado, un sistema inestable que tiene un polo con una parte real positiva puede estabilizarse con la ayuda de SU.
30.1. Implementación del controlador PID
En primer lugar, se debe desarrollar un modelo de controlador discreto y determinar una frecuencia de muestreo adecuada. La amplitud del valor de salida del regulador debe estar entre los valores mínimo y máximo permitidos. A menudo, es necesario limitar no solo la señal de salida, sino también la tasa de cambio debido a las capacidades físicas de los MI y para evitar su desgaste excesivo.
La modificación de los ajustes de parámetros y el cambio de funcionamiento automático a manual u otros cambios en las condiciones de funcionamiento no deben provocar perturbaciones en el proceso controlado.
Los reguladores se pueden crear en tecnología analógica basada en amplificadores operacionales o como dispositivos digitales basados en microprocesadores. Sin embargo, tienen casi la misma apariencia: una carcasa pequeña y resistente que permite la instalación en un entorno industrial.
Si bien la tecnología digital tiene muchas ventajas, el enfoque analógico es la base de las soluciones digitales. Las ventajas de los controladores digitales incluyen la capacidad de conectarlos entre sí mediante canales de comunicación, lo que permite el intercambio de datos y el control remoto. Estamos interesados en programas para un controlador PID digital
Modelo de controlador PID discreto . Es necesario para la implementación del software del controlador analógico. Si el controlador se diseña sobre la base de una descripción analógica, y luego se construye su modelo discreto, en intervalos de muestreo suficientemente pequeños, las derivadas temporales se reemplazan por diferencias finitas y la integración se reemplaza por la suma. El error de salida del proceso se calcula para cada muestra
mi(k)=u C (k) – y(k) .
En este caso, el intervalo de muestreo t s se considera constante y no se tienen en cuenta los cambios de señal que puedan haber surgido durante el intervalo de muestreo.
Hay dos tipos de algoritmo de controlador PID: posicional e incremental
Algoritmo de controlador PID posicional. En el algoritmo posicional ( posición formulario) la señal de salida es el valor absoluto de la variable de control IM. El controlador PID discreto tiene la forma
tu(k)=u 0 +u PAG (k)+u yo (k)+u D (k).
En este caso, el intervalo de muestreo ts se considera constante y no se tienen en cuenta los cambios en la señal que puedan surgir durante el intervalo de muestreo.
Incluso con error de control cero, la señal de salida no es cero y está determinada por el desplazamiento tu 0 .
La parte proporcional del controlador tiene la forma
tu PAG (k)= k∙ mi(k).
La parte integral se aproxima por diferencias finitas
tu yo (k) = tu yo (k – 1) + k∙ (t s / T i) ∙ mi(k)= tu yo (k – 1) + k∙ a∙ mi(k).
El valor del segundo término en pequeñas t s y grande T i puede volverse muy pequeño, por lo que debe garantizar la precisión requerida de su representación de máquina.
La parte diferencial del controlador PID se aproxima por la diferencia hacia atrás
tu D (k) =b∙ tu D (k – 1) – k∙ (T d / t s) ∙ (1– b)∙ [y(k)– y(k – 1)],
|
|
Valor T d / norte = T F es el normalizado norte veces) la constante de tiempo del filtro en la aproximación de la componente diferencial de la ley de control por un enlace aperiódico de primer orden. Número norte tomado en el rango de 5 a 10. El valor b está en el rango de 0 a 1.
algoritmo de incremento Calcula sólo el cambio en su señal de salida. Algoritmo de incremento ( incremental formulario) El controlador PID es conveniente de usar si el IM es un tipo de integrador, como un motor paso a paso. Otro ejemplo de tal MI es una válvula cuya apertura y cierre están controlados por impulsos y que mantiene su posición en ausencia de señales de entrada.
En el algoritmo de incremento, solo los cambios en la señal de salida de control desde el momento de tiempo ( k – 1) hasta el momento k. El algoritmo del controlador se escribe como
Δ tu yo (k) = tu (k) – tu (k – 1) =Δ tu PAG (k) + Δ tu yo (k) + Δ tu D (k).
La parte proporcional del algoritmo de incremento se calcula a partir de la ecuación
Δ tu PAG (k) = tu PAG (k) – tu PAG (k – 1) =k∙ [mi(k)– mi(k – 1)] = k∙ Δ mi(k).
Parte integral - de la ecuación
Δ tu yo (k) = tu yo (k) – tu yo (k – 1) =k∙ a∙ mi(k).
La parte diferencial es de la ecuación
Δ tu D (k) =b Δ tu D (k – 1) – k∙ (T d / t s)∙(1– b)∙ [Δ y(k)– Δ y(k – 1),
Δ y(k) =y(k)– y(k – 1).
El algoritmo es muy simple. Para su aplicación, por regla general, son suficientes operaciones con punto flotante de precisión ordinaria. No tiene problemas por saturación. Al pasar de modo manual a un regulador automático que calcula incrementos, no requiere asignar un valor inicial a la señal de control ( tu 0 en el algoritmo posicional).
El IM se puede llevar a la posición deseada durante el arranque tanto con control manual como automático. Una pequeña desventaja del algoritmo de incremento es la necesidad de tener en cuenta el componente integral.
El valor de referencia se reduce tanto en la parte proporcional como en la diferencial a partir de la segunda muestra después de haberla cambiado. Por lo tanto, si se utiliza un controlador basado en un algoritmo incremental sin componente integral, el proceso controlado puede desviarse del valor de referencia.
Determinación de la frecuencia de muestreo en SN . Es más un arte que una ciencia. Una tasa de muestreo demasiado baja reduce la eficiencia del control, especialmente la capacidad del sistema de control para compensar las perturbaciones. Pero si el intervalo de muestreo excede el tiempo de respuesta del proceso, la perturbación puede afectar el proceso y desaparecer antes de que el controlador tome medidas correctivas. Por lo tanto, al determinar la frecuencia de muestreo, es importante tener en cuenta tanto la dinámica del proceso como las características de la perturbación.
Por otro lado, una tasa de muestreo demasiado alta conduce a una mayor carga de la computadora y al desgaste del IM.
Así, la determinación de la frecuencia de muestreo es un compromiso entre los requerimientos de la dinámica del proceso y el rendimiento disponible de las computadoras y mecanismos tecnológicos. Los controladores digitales estándar que funcionan con una pequeña cantidad de lazos de control (8 a 16) usan una frecuencia de muestreo fija del orden de fracciones de segundo.
La relación señal-ruido también afecta la tasa de muestreo. Con valores bajos de esta relación, es decir, con mucho ruido, se debe evitar una frecuencia de muestreo alta, ya que es más probable que las desviaciones en la señal de medición estén asociadas con ruido de alta frecuencia y no con cambios reales en el proceso físico.
Se considera que una frecuencia de muestreo adecuada está relacionada con el ancho de banda o el tiempo de estabilización del sistema de control de bucle cerrado. Las reglas generales recomiendan que la tasa de muestreo sea de 6 a 10 veces mayor que el ancho de banda, o que el tiempo de establecimiento sea de al menos cinco intervalos de muestreo.
En el caso de que sea aceptable un desfase adicional de 5-15°, la siguiente regla es válida
t s · ω Con = 0,15 – 0,5 ,
donde ω Con – ancho de banda del sistema (a un nivel de 3 dB), t s – período de cuantificación o intervalo de muestreo. (Este enfoque se utiliza en muchos controladores PID industriales digitales de uno o varios bucles).
Limitación de la señal de control . Hay dos requisitos previos para limitar la señal de control:
1) la amplitud de la señal de salida no puede exceder el rango del DAC a la salida de la computadora;
2) el rango operativo de IM también está siempre limitado. La válvula no abre más del 100%; el motor no puede ser alimentado con corriente y voltaje ilimitados.
Por lo tanto, el algoritmo de control debe incluir alguna función que limite la señal de salida. En algunos casos, se debe definir una banda muerta o deadband.
Si se utiliza un controlador con un algoritmo incremental, los cambios en la señal de control pueden ser tan pequeños que el MI no puede procesarlos. Si la señal de control es suficiente para afectar el MI, se recomienda evitar operaciones pequeñas pero frecuentes, que pueden acelerar su desgaste.
Una solución simple es sumar pequeños cambios en la variable de control y emitir una señal de control MI solo después de que se haya excedido algún valor de umbral. La introducción de una zona muerta solo tiene sentido si excede la resolución del DAC a la salida de la computadora
Prevención de la saturación integral. La liquidación integral ocurre cuando un controlador PI o PID tiene que compensar un error que está fuera del rango de la variable controlada durante mucho tiempo. Dado que la salida del regulador es limitada, el error es difícil de anular.
Si el error de control permanece durante mucho tiempo, el valor del componente integral del controlador PID se vuelve muy grande. Esto sucede si la señal de control está tan limitada que la salida calculada del regulador difiere de la salida real del MI.
Dado que la parte integral solo se vuelve cero algún tiempo después de que el valor del error haya cambiado de signo, la saturación integral puede conducir a grandes sobreimpulsos. La saturación integral es el resultado de las no linealidades en el sistema asociadas con el recorte de la señal de control de salida y es posible que nunca se observe en un sistema lineal.
La influencia de la parte integral puede estar limitada por la integración condicional. Siempre que el error sea lo suficientemente grande, no se requiere su parte integral para formar la señal de control, pero la parte proporcional es suficiente para el control.
La parte integral utilizada para eliminar los errores estacionarios se necesita solo en los casos en que el error es relativamente pequeño. Con la integración condicional, este componente se tiene en cuenta en la señal final solo si el error no supera un cierto valor de umbral. Para errores grandes, el controlador PI funciona como un controlador P. Elegir un valor umbral para activar el término integral no es tarea fácil. En los controladores analógicos, la integración condicional se realiza mediante un diodo Zener (limitador), que se conecta en paralelo con un capacitor en el circuito de retroalimentación del amplificador operacional en el bloque integrador del controlador. Tal esquema limita la contribución de la señal integrada.
En los controladores PID digitales, la saturación integral es más fácil de evitar. La parte integral se ajusta en cada intervalo de muestreo para que la salida del controlador no exceda un cierto límite.
La señal de control se calcula primero usando un algoritmo de controlador PI y luego se verifica para ver si excede los límites establecidos:
tu = tu min , si tu d < tu min ;
tu = tu d , si tu min ≤ tu d < tu máximo ;
tu = tu máximo , si tu d ≤ tu máximo ;
Después de limitar la señal de salida, la parte integral del regulador se reinicia. A continuación se muestra un programa de ejemplo para un controlador PI con protección de saturación.
Siempre que la señal de control permanezca dentro de los límites establecidos, la última declaración en el texto del programa no afecta la parte integral del controlador.
(*inicialización*) c1:=K*taus/Ti;
(*regulador*)
Iparte:= Iparte + c1*e;
ud:=K*e+Iparte; (*cálculo de la señal de control*)
si más si (ud<
umax) then u:= ud Iparte:=u-K*e; (* Corrección de parte integral "anti-saturación" *) En la fig. 30.4. Cambio suave de los modos de funcionamiento.
Al cambiar del modo manual al automático, la salida del controlador puede saltar incluso si el error de control es cero. La razón es que el término integral en el algoritmo del controlador no siempre es igual a cero. El controlador es un sistema dinámico, y la parte integral es uno de los elementos del estado interno, que debe conocerse al cambiar el modo de control. El salto en el valor de salida del controlador se puede evitar, y el cambio de modo en este caso se denomina transición sin perturbaciones (transferencia sin perturbaciones). Son posibles dos situaciones: a) transición de modo manual a automático o viceversa; b) cambiar los parámetros del controlador. Se logra una transición suave en el caso a) para un controlador analógico llevando el proceso manualmente a un estado en el que el valor de salida medido es igual al valor de referencia. El proceso se mantiene en este estado mientras la salida del controlador sea cero. En este caso, la parte integral también es cero, y dado que el error es cero, se logra una transición suave. Este procedimiento también es válido para controladores digitales. Otro método es llevar lentamente el valor de referencia al valor final requerido. Primero, el valor de referencia se establece igual a la medición actual y luego gradualmente se ajusta manualmente al valor deseado. Si este procedimiento se realiza con la suficiente lentitud, la parte integral de la señal del controlador permanece tan pequeña que se asegura una transición suave. La desventaja de este método es que requiere bastante tiempo, lo que depende de la naturaleza del proceso. Limitación de la tasa de cambio de la señal de control
. En muchos sistemas de control, es necesario limitar tanto la amplitud como la tasa de cambio de la señal de control. Para esto, se utilizan circuitos de protección especiales, conectados después del canal para ingresar manualmente el valor de referencia. tu C (t) y transmitiendo la señal filtrada al controlador tu L (t), como se muestra en la Fig. 30.5. Como resultado, el proceso "ve" esta señal de control en lugar de la ingresada manualmente. Este método se suele utilizar en la regulación de accionamientos eléctricos. La limitación de la tasa de cambio de la señal se puede lograr con un circuito de retroalimentación simple. Señal de control manual tu C (t), actuando como referencia, se compara con una señal de control válida tu L (t). Primero, su diferencia está limitada por los límites tumin y tumimetroVaya. Luego, el valor resultante se integra, y la integral se aproxima mediante una suma finita. El algoritmo para limitar la tasa de cambio es el siguiente: si< uemin) then uelim:= uemin
(*функция ограничения*)
else if (ue < uemax) then uelim:= ue else uelim:= uemax; uL = uL_antiguo + taus*uelim; Características computacionales del algoritmo del controlador PID.
La implementación digital del controlador PID, debido a la naturaleza secuencial de los cálculos, genera retrasos que no se encuentran en la tecnología analógica. Además, algunas limitaciones (protección de saturación y algoritmos de transición suave) requieren que la salida del regulador y la captación MI ocurran al mismo tiempo. Por lo tanto, los retrasos computacionales deben mantenerse al mínimo. Para ello, se calculan algunos elementos del regulador digital antes del tiempo de muestreo. Para un regulador con protección de saturación, la parte integral se puede calcular de antemano utilizando diferencias directas tu yo
(k + 1)
=u yo (k)+c 1 · mi
(k)
+ C 2 ·
[tu
(k)
- tu d
(k)
] , donde tu
– valor limitado tu d
; T t
es un coeficiente llamado constante de tiempo de seguimiento. La parte diferencial parece C 3
=
(1–
b)
· k· T d
/t s
;
X
(k- 1) =
b·
tu D (k- 1)+c 3 · y
(k- 1). variable X se puede actualizar inmediatamente después del punto en el tiempo k X
(k) =
b·
X(k- 1)+c 3 (1 –
b)
· y
(k). De este modo, tu D (k
+
1)
se puede calcular a partir de (24.2) tan pronto como se obtiene el resultado de la medición y(k
+
1). Es necesaria la optimización de los cálculos, ya que el regulador digital a veces tiene que realizar varios miles de operaciones de control por segundo. En estas condiciones, es importante que algunos coeficientes estén disponibles de inmediato, en lugar de volver a calcularlos cada vez. Además, los reguladores industriales no tienen los procesadores más rápidos ( i 386, 486). Por lo tanto, el orden y el tipo de cálculos afectan en gran medida la velocidad de las operaciones de control. algoritmo PID
. Un ejemplo de un programa de controlador PID en Pascal. Cálculo de coeficientes C 1 ,C 2 y C 3 debe hacerse solo si se cambian los parámetros del controlador k,
T i
,
T d y T F. El algoritmo del controlador se ejecuta en el momento de cada muestra. El programa tiene protección contra la saturación del componente integral. (*Precálculo de coeficientes*) c1:=K*taus /
ti; (*Ecuación 23.7*) с2:= taus /
tt; (*Ecuación 24.1*) beta:=Td /
(Td+taus*N); (*Ecuación 24.1*) c3:= K*Td*(l-beta) /
taús; (*Ecuación 24.2*) c4:= c3*(1 - beta); (*constante local*) (*Algoritmo de control*) uc:=ADinput(canal1); (* entrada de valor de referencia, entrada analógica *) y:= AD_entrada(ch2); (* entrada de medida, entrada analógica *) e:= uc-y; (*cálculo del error de control*) parte:= K*e; (*parte proporcional*) dparte:= x - (c3*y); (* parte diferencial, *) ud:=uO+pparte+iparte+dparte; (*salida del regulador antes del clipping*)if(ud Los estudiantes, estudiantes de posgrado, jóvenes científicos que utilizan la base de conocimientos en sus estudios y trabajos le estarán muy agradecidos. Alojado en http://www.allbest.ru Ministerio de Educación y Ciencia de la Federación Rusa Institución Educativa Presupuestaria del Estado Federal educación profesional superior "UNIVERSIDAD ESTATAL DE KUBAN" (FGBOU VPO "KubGU") TRABAJO FINAL DE TITULACIÓN DE BACHILLERATO Desarrollo y diseño de controladores PID El trabajo fue realizado por Roman Valerievich Presnyakov supervisor dr. Phys.-Math. ciencias, profesor ES Tumaev Contralor candó. Phys.-Math. Ciencias, Profesor Asociado A. A. Martynov Krásnodar 2015 Trabajo final de calificación 83 páginas, 29 fotografías, 42 fuentes. CONTROL PID, SISTEMAS EMPOTRADOS, MICROCONTROLADORES, MÓDULOS DE SOFTWARE, MSP430, INTERRUPCIÓN El objeto de estudio del trabajo final de titulación es el estudio de los principios generales de construcción de controladores tecnológicos proporcional-integral-diferencial y el diseño de un algoritmo para controladores de temperatura basados en microcontroladores MSP430 económicos (Texas Instruments). El documento proporciona una descripción general de los medios de los microcontroladores modernos y los principios de su funcionamiento. Se realiza el análisis de los problemas de implementación hardware y software de controladores tecnológicos de microprocesador. Se dan recomendaciones para el diseño de instrumentos de medición y control basados en microprocesadores y la creación de software para sistemas integrados. Se propone una variante de la implementación del algoritmo del controlador PID. Una característica distintiva es el uso de algoritmos que excluyen el uso de números de coma flotante. Designaciones y abreviaturas Introducción 2. Funciones de sensibilidad. Ecuación Pid Digital 2.2 Forma discreta del controlador. Ecuación digital PID 3. Calidad regulatoria 3.1 Debilitamiento de la influencia de perturbaciones externas. Criterios de calidad 4. Configuración de los parámetros del controlador. principios básicos 4.1 Selección de parámetros del controlador. Ajustes manuales y automáticos 5. Programación de sistemas embebidos 5.1 Principios generales para el desarrollo de sistemas empotrados 5.2 Etapas de creación de software para sistemas embebidos 5.3 Jerarquía de código ejecutable en sistemas embebidos 6. Algoritmo del software creado 6.1 Descripción del algoritmo de operación del controlador de temperatura PID basado en el microcontrolador MSP430F149 Conclusión Lista de fuentes utilizadas Designaciones y abreviaturas controlador de temperatura microcontrolador microcontrolador algoritmo PID Algoritmo proporcional-integral-diferencial capa de abstracción de hardware (capa de abstracción de hardware) Entorno de desarrollo integrado (entorno de desarrollo integrado) modulación de ancho de pulso Controlador lógico programable control de supervisión y adquisición de datos (control de supervisión y adquisición de datos) interfaz periférica en serie (interfaz periférica en serie) interfaz de programación de aplicaciones (interfaz de programación de aplicaciones) lugar de trabajo automatizado software INTRODUCCIÓN El control de procesos tecnológicos con la ayuda de controladores que funcionan según la ley proporcional-integral-diferencial (controladores PID) permite mantener el valor tecnológico requerido con una precisión lo suficientemente alta y una inmunidad aceptable al ruido de influencias perturbadoras externas. Los controladores PID modernos se implementan como un módulo de software de un sistema SCADA ejecutado en una estación de trabajo automatizada (AWS) o un controlador lógico programable (PLC) y como controladores de procesos separados ubicados en gabinetes de control locales y centrales. Como elementos básicos del procesamiento y control de la información, a menudo se utilizan microprocesadores con funcionalidad limitada, lo que plantea el problema de la falta de recursos de hardware y el aumento del costo del sistema. El propósito de este trabajo es revisar los principios para construir controladores proporcionales-integrales-derivativos y desarrollar, sobre la base de la revisión, los principios para crear un controlador PID de temperatura. Al crear un controlador PID de temperatura, se utilizó un medidor-regulador tecnológico de microprocesador programable F0303.2 basado en el microcontrolador MSP430F149, programador MSP-FET430UIF, comparador de voltaje P3003 con un rango de salida de voltaje de 10 nV a 11.111110 V y una clase de precisión de 0.0005 . El programa del microcontrolador se creó en el entorno de desarrollo integrado IAR Embedded Workbench para MSP430 6. La documentación técnica se obtuvo del sitio web del fabricante del microcontrolador. Para la implementación completa del control PID en un dispositivo con microprocesador, es necesario implementar los siguientes subsistemas: Subsistema de medición Subsistema de procesamiento de algoritmos PID Subsistema de interfaz de usuario de gestión Subsistema de salida de impacto regulatorio 1. Principios de creación de controladores PID 1.1 Problemas generales de implementación de controladores PID Para la implementación práctica, es necesario tener en cuenta las características generadas por las condiciones reales de aplicación e implementación técnica. Estas características incluyen: Rango dinámico finito de cambios en las variables físicas del sistema (p. ej., potencia limitada del calentador, capacidad limitada de la válvula); No siempre es posible cambiar el signo de la acción de control (por ejemplo, a menudo no hay un refrigerador en el sistema de mantenimiento de temperatura, es posible que el motor no tenga una carrera inversa, no todos los aviones tienen un sistema de empuje negativo); Precisión de medida limitada, que requiere medidas especiales para realizar la operación de diferenciación con un error aceptable; La presencia de no linealidades típicas en casi todos los sistemas: saturación (limitando el rango dinámico de cambios variables), limitando la velocidad de giro, histéresis y contragolpe; Dispersión tecnológica y variaciones aleatorias de los parámetros del controlador y del objeto; Implementación discreta del controlador; La necesidad de un cambio suave (sin golpes) de los modos de control; 1.2 Ensamblaje de derivados de PID El problema de la diferenciación numérica es bastante antiguo y común tanto en controladores digitales como analógicos. Su esencia radica en que la derivada suele calcularse como la diferencia entre dos variables de magnitud próxima, por lo que el error relativo de la derivada siempre resulta mayor que el error relativo de la representación numérica de la variable diferenciable. En particular, si la entrada del diferenciador recibe una señal sinusoidal A * sin (sht), entonces en la salida obtenemos A * w * cos (sht), es decir, con el aumento de la frecuencia w, la amplitud de la señal en el aumenta la salida del diferenciador. En otras palabras, el diferenciador amplifica la interferencia de alta frecuencia, las ráfagas cortas y el ruido. Si la interferencia amplificada por el diferenciador se encuentra fuera del rango de frecuencia de operación del controlador PID, entonces se puede atenuar usando un filtro de paso alto. La implementación estructural de un diferenciador con un filtro se muestra en la Figura 1. Aquí es decir, la función de transferencia del diferenciador resultante D(s) se puede representar como el producto de la función de transferencia de un diferenciador ideal y la función de transferencia de un filtro de primer orden: donde el coeficiente N establece la frecuencia de corte del filtro y generalmente se elige igual a 2…20; T/N -- constante de tiempo del filtro; s es la frecuencia compleja. Se puede obtener una mayor atenuación del ruido de alta frecuencia con un filtro separado que se conecta en serie con el controlador PID. Usualmente se usa un filtro de segundo orden con una función de transferencia La constante de tiempo del filtro se elige igual a TF = Ti/N, donde N = 2…20, Ti es la constante de integración del controlador PID. Es recomendable no elegir la frecuencia de corte del filtro por debajo de la frecuencia 1/Ti, ya que esto complica el cálculo de los parámetros del controlador y el margen de estabilidad. Figura 1 - Implementación estructural del término diferencial del controlador PID Además del ruido de diferenciación, el rendimiento del controlador PID se ve afectado por el ruido de medición. A través del circuito de retroalimentación, estos ruidos ingresan a la entrada del sistema y luego aparecen como la dispersión de la variable de control u. El ruido de alta frecuencia es perjudicial porque provoca un desgaste acelerado de los accesorios de las tuberías y los motores eléctricos. Debido a que el objeto de control suele ser un filtro de paso bajo, el ruido de la medición rara vez viaja a través del lazo de control hacia la salida del sistema. Sin embargo, aumentan el error de medición y(t) y reducen la precisión de la regulación. En controladores PID, ruido con un espectro en la región de baja frecuencia, causado por influencias externas en el objeto de control, y ruido de alta frecuencia asociado con interferencia electromagnética, ruido en los buses de potencia y tierra, con muestreo de la señal medida, y se distinguen otras razones. El ruido de baja frecuencia se modela como una perturbación externa d(s), el ruido de alta frecuencia se modela como un ruido de medición n(s). 1.3 Nodo integral del controlador PID. saturación integral En operación de estado estable y con pequeñas perturbaciones, la mayoría de los sistemas con controladores PID son lineales. Sin embargo, el proceso de ingreso al régimen requiere casi siempre tener en cuenta la no linealidad del tipo “limitación”. Esta falta de linealidad se debe a las limitaciones naturales de potencia, velocidad, rpm, ángulo de rotación, área de sección transversal de la válvula, rango dinámico, etc. El lazo de control en un sistema que está en saturación (cuando la variable ha llegado al límite) resulta estar abierto, ya que cuando cambia la variable a la entrada del enlace con el límite, su variable de salida permanece invariable. La manifestación más típica del modo de limitación es la llamada "saturación integral", que ocurre cuando el sistema alcanza el modo en controladores con una constante de integración distinta de cero Ti? 0. La saturación integral conduce a un retraso en el proceso transitorio (Figuras 2 y 3). Un efecto similar ocurre debido a la limitación del término proporcional e integral del controlador PID (Figuras 4 y 5). Sin embargo, la saturación integral suele entenderse como un conjunto de efectos asociados a una no linealidad del tipo “limitación”. T1= 0,1 s; T2 = 0,05 s; L = 0,02 s; K = 2; Ti = 0,06 s; Td = 0 Figura 2 - La respuesta de la variable de salida y(t) al salto en la acción de entrada r(t) para el controlador PI bajo la condición de limitar la potencia en la entrada del objeto u(t) y sin limitación (segundo objeto de pedido) T1 = 0,1 s; T2 = 0,05 s; L = 0,02 s; K = 2; Ti = 0,06 s; Td = 0 Figura 3 - Señal en la entrada del objeto u(t) con y sin limitación de potencia (objeto de segundo orden) K = 10; Ti = 0,014 s; Td = 0,3 s; T1 = 0,1 s; T2 = 0,05 s; L = 0,02 s Figura 4 - La respuesta de la variable de salida y(t) al salto en la acción de entrada r(t) para el controlador PID bajo la condición de limitar la potencia en la entrada del objeto u(t) y sin limitación (segundo objeto de pedido) T1 = 0,1 s; T2 = 0,05 s; L = 0,02 s; K = 10; Ti = 0,014 s; Td = 0,3 s Figura 5 - La señal en la entrada del objeto u(t) en el lazo con el controlador PID bajo la condición de limitación de potencia y sin (objeto de segundo orden) y segundo orden donde Kp es el coeficiente de transferencia en estado estacionario; T, T1, T2 - constantes de tiempo; L - retraso del transporte. La esencia del problema de la saturación integral es que si la señal en la entrada del objeto de control u(t) ha entrado en la zona de saturación (limitación), y la señal de desajuste r(t) - y(t) no es igual a cero, el integrador continúa integrando, es decir, la señal aumenta en su salida, pero esta señal no participa en el proceso de regulación y no afecta al objeto por el efecto de saturación. El sistema de control en este caso se vuelve equivalente a un sistema abierto, cuya señal de entrada es igual al nivel de saturación de la señal de control u(t). Para los sistemas térmicos, el límite inferior suele ser cero potencia de calefacción, mientras que el controlador PID requiere que se aplique una "potencia de calefacción negativa" al objeto, es decir, enfriar el objeto. El efecto de la saturación integral se conoce desde hace mucho tiempo. En los reguladores analógicos, su eliminación fue bastante difícil, ya que en ellos el problema no se podía resolver algorítmicamente, sino que se solucionaba solo por hardware. Con la llegada de los microprocesadores, el problema se puede resolver de manera mucho más eficiente. Los métodos para eliminar la saturación integral suelen ser objeto de invenciones, pertenecen al secreto comercial de las empresas fabricantes y están protegidos por patentes. Limitar la velocidad de giro de la acción de entrada. Dado que el valor máximo de la acción de entrada en el objeto de control u(t) disminuye con una disminución en la diferencia r(t) - y(t), para eliminar el efecto de limitación, simplemente puede reducir la velocidad de respuesta de la señal del punto de ajuste r(t), por ejemplo, usando un filtro. La desventaja de este método es la disminución de la velocidad del sistema, así como la incapacidad de eliminar la saturación integral causada por perturbaciones externas y no por la señal del punto de ajuste. Cuando la acción de control sobre el objeto alcanza la saturación, la retroalimentación se rompe y el componente integral continúa creciendo, incluso si debería haber disminuido en ausencia de saturación. Por lo tanto, uno de los métodos para eliminar la saturación integral es que el controlador monitorea la magnitud de la acción de control sobre el objeto, y tan pronto como alcanza la saturación, el controlador entra en una prohibición de software de integración para el componente integral. Compensación de saturación con retroalimentación adicional. El efecto de la saturación integral se puede debilitar monitoreando el estado del actuador que ingresa a la saturación y compensando la señal aplicada a la entrada del integrador. La estructura de un sistema con dicho compensador se muestra en la Figura 6. Figura 6 - Compensación del efecto de saturación integral con ayuda de retroalimentación adicional para transmitir la señal de error es a la entrada del integrador El principio de su trabajo es el siguiente. El sistema genera una señal de desajuste entre la entrada y la salida del actuador es = u - v. La señal en la salida del actuador se mide o se calcula utilizando un modelo matemático (Figura 6). Si es = 0, esto es equivalente a ningún compensador y obtenemos un controlador PID normal. Si dispositivo ejecutivo satura, entonces v > u y es< 0. При этом сигнал на входе интегратора уменьшается на величину ошибки es, что приводит к замедлению роста сигнала на выходе интегратора, уменьшению сигнала рассогласования и величины выброса на переходной характеристике системы (рисунки 7 и 8). Постоянная времени Ts определяет степень компенсации сигнала рассогласования. Figura 7 - Respuesta del sistema a un solo salto r(t) para diferentes valores de la constante de tiempo Ts K = 7; Ti = 0,01 s; Td = 0,1 s, T1 = 0,1 s; T2 = 0,05 s; L = 0,01 s Figura 8 - Respuesta del sistema a la señal de error es (objeto de segundo orden, parámetros del controlador: En algunos controladores, la entrada u del dispositivo de comparación es se destaca como una entrada separada: la "entrada de seguimiento", que es conveniente cuando se construyen sistemas de control complejos y cuando se conectan en cascada varios controladores. Integración condicional. Este método es una generalización de la prohibición algorítmica de integración. Luego del inicio de la prohibición, el componente integral se mantiene constante, en el mismo nivel que tenía al momento de la aparición de la prohibición de integración. La generalización es que la prohibición de integración ocurre no solo cuando se alcanza la saturación, sino también bajo ciertas otras condiciones. Tal condición puede ser, por ejemplo, el logro por parte de la señal de error e o la variable de salida y de un cierto valor especificado. Al apagar el proceso de integración, es necesario monitorear el estado del integrador al momento de apagarlo. Si acumula un error y aumenta el grado de saturación, entonces la integración se apaga. Si en el momento del apagado el grado de saturación disminuye, el integrador se deja encendido. La Figura 9 muestra un ejemplo de un proceso transitorio en un sistema con el integrador apagado cuando el valor de salida y(t) alcanza un valor dado (y = 0, y = 0.2, y = 0.8). Figura 9 - Respuesta a un solo salto r(t) de un sistema con saturación del actuador en varios niveles de apagado del integrador y Integrador restringido. Se presentó una variante de la implementación del controlador PI utilizando un integrador en el circuito de retroalimentación. Si este circuito se complementa con un limitador (Figura 10), entonces la señal u en la salida nunca superará los límites establecidos por los umbrales del limitador, lo que reduce el sobreimpulso en la respuesta transitoria del sistema (Figura 12). La figura 11 muestra una modificación de dicho limitador. El modelo del efecto de recorte se puede mejorar si, después de superar el nivel en el que se produce el recorte, se reduce la señal a la salida del modelo (Figura 13). Esto acelera la recuperación del sistema del modo de saturación. Figura 10 - Modificación del integrador con limitador (en paralelo) Figura 11 - Modificación del integrador con limitador (en serie) Figura 12 - Respuesta a un solo salto r(t) de un sistema que contiene integrador con restricción superior Uup Figura 13 - Función de transferencia mejorada del modelo de efecto de recorte 1.4 Margen de estabilidad del sistema. criterio de Nyquist La posibilidad de pérdida de estabilidad es la principal desventaja de los sistemas de retroalimentación. Por lo tanto, asegurar el margen de estabilidad necesario es el paso más importante en el desarrollo y puesta a punto del controlador PID. La estabilidad de un sistema con un controlador PID es la capacidad del sistema para volver a rastrear el punto de ajuste después del cese de las influencias externas. En el contexto de esta definición, las influencias externas significan no solo las perturbaciones externas que actúan sobre el objeto, sino también cualquier perturbación que actúe sobre cualquier parte del sistema cerrado, incluido el ruido de medición, la inestabilidad temporal del punto de ajuste, el ruido de muestreo y cuantificación, el ruido y el error de cálculo. Todas estas perturbaciones provocan desviaciones del sistema de la posición de equilibrio. Si después de la terminación de su influencia, el sistema vuelve a la posición de equilibrio, luego se considera estable. Cuando se analiza la estabilidad de los controladores PID, generalmente se limita a estudiar la respuesta del sistema a un cambio de escalón en el punto de ajuste r(t), ruido de medición n(t) y perturbaciones externas d(t). La pérdida de estabilidad se manifiesta como un aumento ilimitado de la variable controlada del objeto o como su oscilación con amplitud creciente. En condiciones de producción, los intentos de lograr empíricamente la estabilidad de un sistema con un controlador PID, sin su identificación, no siempre conducen al éxito (en primer lugar, esto se aplica a los sistemas con un objeto de alto orden u objetos que son difíciles de identificar , así como sistemas con un gran retraso de transporte). Parece que la estabilidad es una propiedad mística que no siempre se puede controlar. Sin embargo, si el proceso se identifica con suficiente precisión, el misticismo desaparece y el análisis de estabilidad se reduce al análisis de una ecuación diferencial que describe un ciclo cerrado con retroalimentación. De interés práctico es el análisis del margen de estabilidad, es decir, la determinación de los valores numéricos de los criterios que permiten indicar qué tan lejos está el sistema del estado de inestabilidad. La información más completa sobre el margen de estabilidad del sistema se puede obtener resolviendo una ecuación diferencial que describe un sistema cerrado bajo perturbaciones externas. Sin embargo, este proceso consume demasiado tiempo, por lo tanto, para los sistemas lineales, se utilizan métodos simplificados para estimar el margen de estabilidad sin resolver ecuaciones. Consideraremos dos métodos de estimación: usando la hodógrafa de la respuesta de frecuencia compleja en lazo abierto (criterio de Nyquist) y usando la respuesta de frecuencia logarítmica y la respuesta de fase (diagramas de Bode). Un sistema estable puede volverse inestable con pequeños cambios en sus parámetros, por ejemplo, debido a su dispersión tecnológica. Por lo tanto, más adelante analizaremos la función de sensibilidad de un sistema con un controlador PID, lo que nos permite identificar las condiciones bajo las cuales el sistema se vuelve grueso (insensible a los cambios en sus parámetros). Un sistema que mantiene un margen de estabilidad dado sobre todo el rango de cambios de parámetros debido a su variación tecnológica, envejecimiento, condiciones de operación, sobre todo el rango de cambios de parámetros de carga, así como sobre todo el rango de perturbaciones que actúan sobre el sistema en condiciones reales. condiciones de operación, se llama robusta. A veces, la robustez y la rudeza se utilizan como conceptos equivalentes. criterio de Nyquist. Considere un sistema que consta de un controlador R y un objeto de control P (Figura 14), que se obtiene eliminando el circuito de señal de consigna de un sistema clásico con un controlador PID. Supondremos que la realimentación está abierta, y para cerrarla basta conectar los puntos x e y. Supongamos ahora que la entrada x recibe una señal Luego, después de haber pasado por el controlador y el objeto de control, esta señal aparecerá en la salida y con una amplitud y fase cambiadas en la forma: y(t) = ? |G(jw0)|sin(w0t + ?), (4) donde G(jsh) = R(jsh)P(jsh) es la respuesta de frecuencia compleja (CFC) del sistema, ? = arg(G(jø0)) - argumento CCH, |G(jø0)| - Módulo CFC a frecuencia w0. Por lo tanto, al pasar por el regulador y el objeto, la amplitud de la señal cambiará en proporción al módulo y la fase, según el valor del argumento CFC. Figura 14 - Estructura de un sistema de control en lazo abierto con un controlador PID para análisis de estabilidad Si ahora cerramos los puntos x e y, entonces la señal circulará en un bucle cerrado y se cumplirá la condición y(t) = x(t). Si, además, |G(jø0)| ? 1 y? \u003d 180 °, es decir, después de pasar por el bucle, la señal ingresa a la entrada del controlador en la misma fase que en el ciclo anterior, luego, después de cada paso por el bucle, la amplitud de la señal sinusoidal aumentará hasta alcanzar el límite del rango de linealidad del sistema, después del cual la forma de oscilación se vuelve diferente de la sinusoidal. En este caso, el método de linealización de armónicos se puede utilizar para analizar la estabilidad, cuando solo se considera el primer armónico de la señal distorsionada. En estado estacionario, después de limitar la amplitud de oscilación, debido a la igualdad y(t) = x(t), se cumplirá la siguiente condición: |G(jw0)|=1, es decir, G(jw0)= - 1 (5) Al resolver la ecuación G(jw0) = -1, puede encontrar la frecuencia de las oscilaciones w0 en un sistema cerrado. La respuesta de frecuencia compleja G(jш) se representa gráficamente en forma de hodógrafa (diagrama de Nyquist), un gráfico en las coordenadas Re e Im (Figura 15). La flecha en la línea de la hodógrafa indica la dirección del movimiento del "lápiz" con una frecuencia creciente. El punto G(jw0) = -1, que corresponde a la condición para la existencia de oscilaciones no amortiguadas en el sistema, en este gráfico tiene las coordenadas Re = -1 e Im = 0. Por lo tanto, el criterio de estabilidad de Nyquist se formula de la siguiente manera : un circuito que es estable en estado abierto permanecerá estable y después de su cierre, si su CFC en estado abierto no cubre el punto de coordenadas [-1, j0]. Más estrictamente, al moverse a lo largo de la trayectoria de la hodógrafa en la dirección de la frecuencia creciente, el punto [-1, j0] debe permanecer a la izquierda para que el bucle cerrado sea estable. K=6; T1 = T2 = 0,1 s; L = 0,01 s Figura 15 - Tres hodógrafas de la CFC de un sistema abierto G(jw) para un objeto de segundo orden La Figura 16 muestra las respuestas de un sistema cerrado con tres hodógrafas diferentes (Figura 15) a un solo paso de punto de ajuste. En los tres casos, el sistema es estable, pero la tasa de amortiguamiento de las oscilaciones y la forma de la transición su proceso es diferente. Es intuitivamente claro que un sistema con parámetros Ti = 0,01 s, Td = 0,1 s está más cerca de entrar en un estado de oscilaciones no amortiguadas con un pequeño cambio en sus parámetros. por lo tanto al diseñar un controlador PID, es importante garantizar no tanto la estabilidad como su reserva, que es necesaria para el funcionamiento normal del sistema en condiciones reales. El margen de estabilidad se estima como el grado de alejamiento del CFC del punto crítico [-1, j0]. Si |G(jø0)|< 1, то можно найти, во сколько раз осталось увеличить передаточную функцию, чтобы результирующее усиление вывело систему в колебательный режим: gm|G(jщ0)| = 1, откуда El margen de ganancia gm es el valor por el cual se debe multiplicar la función de transferencia de un sistema en lazo abierto G(jsh180) para que su módulo a una frecuencia de cambio de fase de 180 ° (sh180) sea igual a 1. Si a una frecuencia de w180 la ganancia de lazo abierto es G(jsh180) = -1/gm (Fig. 15), entonces una ganancia adicional de gm llevará el sistema al punto [-1, j0], ya que (-1/gm) gm = -1. De manera similar se introduce el concepto de margen de fase: este es el valor mínimo m por el cual es necesario aumentar el desfase en un sistema abierto arg(G(jw)) para que el desfase total alcance los 180°, es decir El signo “+” antes de arg(G(jø1)) es porque arg(G(jø1))< 0. Для оценки запаса устойчивости используют также минимальное расстояние sm от кривой годографа до точки [-1, j0] (рисунок 15). En la práctica se consideran aceptables los valores gm = 2...5,m = 30...60°, sm = 0,5...0,8, para el gráfico de la Figura 15 estos criterios tienen los siguientes valores: Gm1 = 12,1; m1 = 15°; sm1 = 0,303 (para el caso Ti = 0,01 s, Gm2 = 11,8; m2 = 47,6°; sm2 = 0,663 (para el caso Ti = 0,05 s, Gm3 = 1,5; m3 = 35,2°; sm3 = 0,251 (para el caso Ti = 0,05 s, Si la curva hodógrafa se cruza con el eje real en varios puntos, para evaluar el margen de estabilidad, tome el que esté más cerca del punto [-1, j0]. Con una hodógrafa más compleja, se puede utilizar una estimación del margen de estabilidad como margen de retardo. El margen de retraso es el retraso mínimo agregado al bucle para hacerlo inestable. Muy a menudo, este criterio se utiliza para evaluar el margen de estabilidad de los sistemas con el predictor de Smith. Criterio de estabilidad de frecuencia Para una representación gráfica de la función de transferencia de un sistema abierto y una evaluación del margen de estabilidad, se puede utilizar la respuesta de frecuencia logarítmica y la respuesta de fase (Figura 17). Para evaluar el margen de fase, primero, utilizando la respuesta de frecuencia, se encuentra la frecuencia u1 (frecuencia de corte o frecuencia de ganancia unitaria), en la que G(ju1) = 1, luego se encuentra el margen de fase correspondiente del PFC. Para estimar el margen de ganancia, primero, usando el PFC, encuentre la frecuencia w180, en la cual el cambio de fase es de 180 °, luego encuentre el margen de ganancia de la respuesta de frecuencia. La figura 17 muestra ejemplos de construcciones gráficas para estimar la ganancia y el margen de fase del sistema, cuyas hodógrafas se muestran en la figura 15. Si el margen de fase de lazo abierto es 0° o el margen de ganancia es 1, el sistema será inestable después de que se cierre el lazo de retroalimentación. Figura 16 - Respuesta transitoria de un sistema cerrado, que tiene hodógrafas que se muestran en la Figura 15 2. Funciones de sensibilidad. ecuación del controlador PID digital 2.1 Funciones de sensibilidad. robustez Conmutación sin golpes de los modos de control La función de transferencia de un objeto real P(s) puede cambiar durante la operación por el valor DP(s), por ejemplo, debido a cambios en la carga en el eje del motor, el número de huevos en la incubadora, el nivel o la composición de el líquido en el autoclave, por envejecimiento y desgaste del material, aparición de holguras, cambios de lubricación, etc. Un sistema de control automático correctamente diseñado debe mantener sus indicadores de calidad no solo en condiciones ideales, sino también en presencia de los factores dañinos enumerados. Evaluar la influencia de un cambio relativo en la función de transferencia del objeto DP/P sobre la función de transferencia del sistema cerrado Gcl y(s) = r(s), Gcl(s) = (8) Encuentre el diferencial dGcl: Dividiendo ambos lados de esta igualdad por Gcl y sustituyendo Gcl = PR/(1+PR) en el lado derecho, obtenemos: Figura 17 - Evaluación de la ganancia y el margen de fase para un sistema con una hodógrafa como se muestra en la Figura 15 De (10) el significado del coeficiente S es visible: caracteriza el grado de influencia del cambio relativo en la función de transferencia del objeto sobre el cambio relativo en la función de transferencia del circuito cerrado, es decir, S es el coeficiente de sensibilidad del lazo cerrado a la variación en la función de transferencia del objeto. Dado que el coeficiente S \u003d S (jsh) depende de la frecuencia, se denomina función de sensibilidad. Como se sigue de (10), Introduzcamos la notación: El valor T se denomina función de sensibilidad complementaria (adicional), ya que S + T = 1. La función de sensibilidad le permite evaluar el cambio en las propiedades del sistema después de que se cierra la retroalimentación. Dado que la función de transferencia de un sistema abierto es igual a G = PR, y de un sistema cerrado Gcl = PR/(1+PR), entonces su relación es Gcl/G = S. De manera similar, para un sistema abierto, la función de transferencia desde la entrada de las perturbaciones d hasta la salida de un sistema cerrado es (ver ) P(s)/(1 + P(s)R(s)), y en lazo abierto es P(s), por lo que su relación también es S. Para la función de transferencia de la entrada de ruido de medición n a la salida del sistema, se puede obtener la misma relación S. Por lo tanto, conociendo la forma de la función S(jw) (por ejemplo, la Figura 18), podemos decir cómo cambiará la supresión de influencias externas en el sistema para diferentes frecuencias después de que se cierre el circuito de retroalimentación. Obviamente, los ruidos que se encuentran en el rango de frecuencia en el que |S(jш)| > 1, después de cerrar la realimentación aumentará, y el ruido con frecuencias en las que |S(jш)|< 1, после замыкания обратной связи будут ослаблены. El peor de los casos (la mayor amplificación de las influencias externas) se observará en la frecuencia máxima Ms del módulo de la función de sensibilidad (Figura 18): El máximo de la función de sensibilidad se puede relacionar con el margen de estabilidad sm (Figura 15). Para ello, prestamos atención al hecho de que |1 + G(jш)| representa la distancia desde el punto [-1, j0] hasta el punto actual en la hodógrafa de la función G(jø). Por lo tanto, la distancia mínima desde el punto [-1, j0] hasta la función G(jø) es igual a: Comparando (13) y (14), podemos concluir que sm = 1/Ms. Si el módulo G(jsh) disminuye al aumentar la frecuencia, entonces, como puede verse en la Figura 15, (1-sm) ? 1/gr. Sustituyendo aquí la relación sm = 1/Ms, obtenemos una estimación del margen de ganancia expresado en términos del máximo de la función de sensibilidad: De manera similar, pero con supuestos más generales, podemos escribir la estimación del margen de fase en términos del máximo de la función de sensibilidad: Por ejemplo, para Ms = 2 obtenemos gm ? 2 y? 29°. Figura 18 - Funciones de sensibilidad para el sistema con hodógrafas mostradas en la Figura 13 La robustez es la capacidad de un sistema para mantener un margen de estabilidad dado con variaciones en sus parámetros causadas por un cambio en la carga (por ejemplo, cuando cambia la carga del horno, cambian sus constantes de tiempo), la difusión tecnológica de los parámetros y su envejecimiento, influencias externas , errores de cálculo y error de modelo de objeto. Usando el concepto de sensibilidad, podemos decir que la robustez es una baja sensibilidad del margen de estabilidad a las variaciones en los parámetros de un objeto. Si los parámetros del objeto cambian dentro de pequeños límites, cuando es posible usar el reemplazo del diferencial con un incremento finito, el efecto de los cambios en los parámetros del objeto sobre la función de transferencia del sistema cerrado se puede estimar usando el función de sensibilidad (10). En particular, se puede concluir que en aquellas frecuencias donde el módulo de la función de sensibilidad es pequeño, el efecto de los cambios en los parámetros del objeto sobre la función de transferencia de un sistema cerrado y, en consecuencia, sobre el margen de estabilidad será pequeño. Para evaluar el impacto de grandes cambios en los parámetros del objeto, representamos la función de transferencia del objeto en forma de dos términos: P = P0 + PD, (17) donde P0 es la función de transferencia calculada, DP es la desviación de P0, que debe ser una función de transferencia estable. Entonces, la ganancia de bucle de un sistema abierto se puede representar como G = RP0 + RDP = G0 + RDP. Dado que la distancia desde el punto [-1, j0] hasta el punto actual A en la hodógrafa del sistema no perturbado (para el cual DP = 0) es igual a |1 + G0| (Figura 19), la condición de estabilidad para un sistema con desviación de ganancia de bucle RDP se puede representar como: |RDP|< |1+G0|, donde T es una función de sensibilidad adicional (12). Finalmente, podemos escribir la razón: que debe cumplirse para que el sistema permanezca estable cuando los parámetros del proceso cambien por el valor de DP(jsh). Reducción de ceros y polos. Dado que la función de transferencia de lazo abierto G = RP es el producto de dos funciones de transferencia, que en caso general tienen un numerador y un denominador, entonces es posible cancelar los polos que se encuentran en el semiplano derecho o están cerca de él. Dado que en condiciones reales, cuando hay una dispersión de parámetros, dicha reducción se realiza de manera imprecisa, puede surgir una situación en la que un análisis teórico lleve a la conclusión de que el sistema es estable, aunque de hecho, con una pequeña desviación de los parámetros del proceso. a partir de los valores calculados, se vuelve inestable. Por lo tanto, cada vez que se reducen los polos, es necesario verificar la estabilidad del sistema con una dispersión real de los parámetros del objeto. Figura 19 - Explicación de la derivación de la relación (18) El segundo efecto del acortamiento de los polos es la aparición de una diferencia significativa entre el tiempo de establecimiento del proceso transitorio en un sistema cerrado bajo la influencia de una señal de consigna y perturbaciones externas. Por lo tanto, es necesario verificar la respuesta del controlador sintetizado bajo la influencia no solo de la señal del punto de ajuste, sino también de perturbaciones externas. Conmutación sin golpes de los modos de control. En los controladores PID, puede haber modos en los que sus parámetros cambien abruptamente. Por ejemplo, cuando es necesario cambiar la constante de integración en un sistema en funcionamiento o cuando, después del control manual del sistema, es necesario cambiar al modo automático. En los casos descritos, pueden ocurrir sobreimpulsos no deseados de la variable controlada si no se toman medidas especiales. Por lo tanto, surge el problema de la conmutación suave ("sin golpes") de los modos de funcionamiento o los parámetros del controlador. El método principal para resolver el problema es construir una estructura de controlador de este tipo, cuando el cambio de parámetros se realiza antes de la etapa de integración. Por ejemplo, con un parámetro variable Ti = Ti (t), el término integral se puede escribir de dos formas: yo(t) = o yo(t) = . En el primer caso, cuando Ti (t) cambia abruptamente, el término integral cambiará abruptamente, en el segundo caso, cambiará suavemente, ya que Ti (t) está bajo el signo integral, cuyo valor no puede cambiar abruptamente. Un método similar se implementa en la forma incremental del controlador PID (consulte la sección "Forma incremental del controlador PID digital") y en la forma serial del controlador PID, donde la integración se realiza en la etapa final del cálculo de control. 2.2 Forma del controlador discreto Ecuación del controlador PID digital Las variables continuas son convenientes para el análisis y la síntesis de controladores PID. Para la implementación técnica, es necesario cambiar a una forma discreta de ecuaciones, ya que la base de todo controlador es un microcontrolador, controlador o computadora que opera con variables obtenidas de señales analógicas después de su cuantificación de tiempo y muestreo de nivel. Debido al tiempo finito para calcular la acción de control en el microcontrolador y el retraso en la conversión de analógico a digital entre el momento en que la señal analógica llega a la entrada del controlador y la aparición de la acción de control en su salida, se produce un retraso no deseado. aparece, lo que aumenta el retraso general en el bucle de control y reduce el margen de estabilidad. El principal efecto que aparece durante el muestreo y que a menudo se “redescubre” es la aparición de frecuencias de alias en el espectro de la señal cuantificada en el caso de que la frecuencia de cuantificación no sea lo suficientemente alta. Un efecto similar ocurre al filmar una rueda de automóvil girando. La frecuencia de la señal de alias es igual a la diferencia entre la frecuencia de interferencia y la frecuencia de cuantificación. En este caso, la señal de interferencia de alta frecuencia se desplaza a la región de baja frecuencia, donde se superpone a la señal útil y crea grandes problemas, ya que es imposible filtrarlo en esta etapa. Para eliminar el efecto de alias, es necesario instalar un filtro analógico antes de la entrada del convertidor de analógico a digital, que atenuaría el ruido en al menos un orden de magnitud a una frecuencia igual a la mitad de la frecuencia de cuantificación. Normalmente se utiliza un filtro Butterworth de segundo orden o superior. La segunda solución al problema es aumentar la frecuencia de cuantificación para que sea al menos 2 veces (según el teorema de Kotelnikov) más alta que la frecuencia máxima del espectro de ruido. Esto permite aplicar un filtro de paso bajo digital después de la cuantificación. Con tal tasa de muestreo, la señal digital recibida es completamente equivalente a la analógica en términos de cantidad de información, y todas las propiedades del controlador analógico pueden extenderse al digital. Transición a ecuaciones en diferencias finitas. La transición a variables discretas en las ecuaciones del controlador analógico se realiza reemplazando derivadas e integrales con sus contrapartes discretas. Si la ecuación está escrita en forma de operador, primero se realiza una transición del área de la imagen al área original. En este caso, el operador de diferenciación se reemplaza por una derivada, el operador de integración se reemplaza por una integral. Hay muchas formas de aproximar derivadas e integrales por sus contrapartes discretas, las cuales se describen en los cursos sobre métodos numéricos para resolver ecuaciones diferenciales. En los controladores PID, los más comunes son los tipos más simples de aproximación de la derivada por una diferencia finita y la integral por una suma finita. Considere el término integral del controlador PID: Diferenciando ambas partes con respecto al tiempo, obtenemos Reemplazando las diferenciales en esta expresión con diferencias finitas (diferencias a la izquierda), obtenemos donde el índice i significa que el valor dado se tomó en el tiempo ti (nótese que aquí y debajo el índice i en Ti no denota el número del paso de tiempo, sino coeficiente integral controlador PID). De la última expresión obtenemos: Así, el siguiente valor de la integral se puede calcular conociendo el anterior y el valor del error en el momento anterior. Sin embargo, tal fórmula tiende a acumular un error de cálculo con el tiempo si la relación Dt/Ti no es lo suficientemente pequeña. Otra fórmula de integración es más estable, con diferencias correctas, cuando el valor del error se toma al mismo tiempo que la integral calculada: Considere el término diferencial de un controlador PID con un filtro: Pasando esta fórmula de imágenes a originales, obtenemos: Reemplazando las diferenciales con incrementos finitos, obtenemos la ecuación en diferencias: Nótese que para la convergencia del proceso iterativo (21) es necesario que Cuando Dt > Td/N, el proceso iterativo (21) se vuelve oscilatorio, lo cual es inaceptable para el controlador PID. La ecuación en diferencias obtenida usando las diferencias correctas tiene las mejores características: Aquí, la condición de convergencia se cumple para todos los Dt y no se producen oscilaciones para ningún valor de los parámetros. Además, la última fórmula le permite "apagar" el componente diferencial en el controlador PID configurando Td = 0, lo que no se puede hacer en la expresión (21), ya que en este caso se produce la división por cero. Puede usar fórmulas aún más precisas para diferenciación e integración numérica, conocidas del curso de métodos numéricos para resolver ecuaciones. El valor del ciclo de cuantificación Dt se elige lo más pequeño posible, esto mejora la calidad de la regulación. Para asegurar una buena calidad de regulación, no debe ser más de 1/15...1/6 del tiempo de establecimiento de la respuesta transitoria del objeto al nivel de 0,95 o 1/4...1/6 del tiempo valor del retraso del transporte. Sin embargo, con un aumento en la frecuencia de cuantificación de más de 2 veces en comparación con la frecuencia superior del espectro de señales perturbadoras (según el teorema de Kotelnikov), no hay más mejoras en la calidad de la regulación. Si no hay un filtro anti-aliasing en la entrada del regulador, la frecuencia de cuantificación se elige 2 veces más alta que la frecuencia de corte superior del espectro de ruido para usar el filtrado digital. También se debe tener en cuenta que el dispositivo ejecutivo debe tener tiempo para trabajar durante el tiempo Dt. Si el controlador se usa no solo para la regulación, sino también para la señalización de alarma, entonces el ciclo de cuantificación no puede ser menor que el retraso permitido para la operación de la señal de alarma. Con un ciclo de cuantificación pequeño, aumenta el error en el cálculo de la derivada. Para reducirlo, puede utilizar el suavizado de los datos recibidos en varios puntos recopilados antes de la etapa de diferenciación. Ecuación del controlador PID digital. Con base en lo anterior, la ecuación del controlador PID discreto se puede escribir como: donde i es el número del paso de tiempo. Para iniciar el algoritmo, normalmente elegimos uD0 = 0, I0 = 0, e0 = 0, pero puede haber otros condiciones iniciales, dependiendo del significado de un problema de control específico. Tenga en cuenta que el algoritmo obtenido simplemente reemplazando los operadores de diferenciación e integración en la ecuación clásica del controlador PID diferencias finales y sumas finales tiene poca estabilidad y baja precisión, como se mostró anteriormente. Sin embargo, a medida que aumenta la frecuencia de muestreo, se borra la diferencia entre los dos algoritmos anteriores. Forma incremental de un controlador PID digital. Muy a menudo, especialmente en redes neuronales y controladores difusos, la ecuación del controlador PID se utiliza en forma de una dependencia del incremento de la variable de control en el error de control y sus derivados (sin un término integral).Esta representación es conveniente cuando un dispositivo externo juega el papel de un integrador, por ejemplo, un motor paso a paso o convencional. El ángulo de giro de su eje es proporcional al valor de la señal de control y al tiempo. En los controladores difusos, al formular reglas difusas, un experto puede formular la dependencia de la variable de control del valor de la derivada, pero no puede formular la dependencia del valor integral, ya que la integral “recuerda” toda la historia del cambio de error, lo que una persona no puede recordar. La forma incremental del controlador PID se obtiene derivando la ecuación (25): Para obtener un error de control cero, se debe instalar un integrador a la salida del controlador incremental (Figura 20): Figura 20 - Forma incremental del controlador PID Pasando las expresiones obtenidas a diferencias finitas, obtenemos la forma discreta del controlador PID incremental: donde Dui+1 = ui+1 - ui; Dei = ei - ei-1. Se puede obtener una ecuación en diferencias más estable y precisa sustituyendo las expresiones para ui+1 y ui de (24) en la fórmula Dui+1 = ui+1 - ui. La forma incremental del controlador es conveniente para su uso en microcontroladores, ya que en él la mayor parte de los cálculos se realizan en incrementos, que pueden representarse mediante una palabra con una pequeña cantidad de dígitos binarios. Para obtener el valor de la variable de control, puede realizar una suma acumulativa en la etapa final de los cálculos: ui+1 = ui + Dui+1. Antes de calcular los parámetros del controlador, es necesario formular el objetivo y los criterios para la calidad de la regulación, así como las restricciones sobre la magnitud y la tasa de cambio de las variables en el sistema. Tradicionalmente, los principales indicadores de calidad se formulan en función de los requisitos de forma de respuesta de un sistema cerrado ante un cambio escalón en la consigna. Sin embargo, este criterio es muy limitado. En particular, no dice nada sobre la cantidad de atenuación del ruido de medición o la influencia de perturbaciones externas, puede dar una idea errónea de la robustez del sistema. Por lo tanto, para describir o probar completamente un sistema con un controlador PID, se necesitan una serie de indicadores de calidad adicionales, que se analizarán más adelante. En el caso general, la elección de los indicadores de calidad no puede formalizarse por completo y debe realizarse en función del significado del problema a resolver. 3. Calidad regulatoria 3.1 Criterios de desempeño Atenuación de la influencia de perturbaciones externas La elección del criterio de calidad del control depende del propósito para el que se utilice el regulador. El objetivo podría ser: Mantener un valor constante de un parámetro (por ejemplo, la temperatura); Seguimiento de puntos de ajuste o control de software; Control de compuertas en un tanque de líquido, etc. Para una tarea en particular, el factor más importante puede ser: Forma de respuesta a perturbaciones externas (tiempo de estabilización, sobreimpulso, tiempo de respuesta, etc.); Forma de respuesta al ruido de medición; Forma de respuesta a la señal de consigna; Robustez en relación a la dispersión de los parámetros del objeto de control; Ahorro de energía en un sistema controlado; Minimización del ruido de medida. Para un controlador PID clásico, los parámetros que son mejores para monitorear el punto de ajuste generalmente son diferentes de los parámetros que son mejores para atenuar la influencia de perturbaciones externas. Para que ambos parámetros sean óptimos al mismo tiempo, es necesario utilizar controladores PID con dos grados de libertad. El seguimiento preciso de los cambios de punto de referencia es necesario en los sistemas de control de movimiento, en robótica; en los sistemas de control de procesos, donde el punto de consigna suele permanecer invariable durante mucho tiempo, se requiere la máxima atenuación de la influencia de la carga (perturbaciones externas); en los sistemas de control de yacimientos líquidos se requiere asegurar el flujo laminar (minimización de la varianza de la variable de salida del regulador), etc. Como se muestra en la subsección, la retroalimentación debilita la influencia de las perturbaciones externas en |S(jш)| tiempos, excepto para aquellas frecuencias en las que |S(jw)|. Las perturbaciones externas se pueden aplicar a un objeto en muchas partes diferentes, sin embargo, cuando se desconoce la ubicación específica, se considera que la perturbación actúa sobre la entrada del objeto. En este caso, la respuesta del sistema a las perturbaciones externas viene determinada por la función de transferencia de la entrada de perturbaciones externas a la salida del sistema: Dado que las perturbaciones externas generalmente se encuentran en la parte de baja frecuencia del espectro, donde |S(jш)| y, en consecuencia, T, entonces la expresión (28) se puede simplificar: Así, para debilitar la influencia de las perturbaciones externas (en particular, la influencia de la carga), se puede reducir la constante de integración Ti. En el dominio del tiempo, la respuesta a perturbaciones externas se estima a partir de la respuesta a un solo salto d(t). Reducción del efecto del ruido de medición: La función de transferencia desde el punto de aplicación del ruido hasta la salida del sistema es: Debido a la disminución en la respuesta de frecuencia del objeto por frecuencias altas la función de sensibilidad tiende a 1 (Figura 18). Por lo tanto, es imposible reducir el efecto del ruido de medición usando retroalimentación. Sin embargo, estos ruidos se eliminan fácilmente mediante el uso de filtros de paso bajo y un blindaje y conexión a tierra adecuados. El sistema cerrado permanece estable cuando los parámetros del objeto cambian por el valor de DP(jw), si se cumple la condición (18). Criterios de calidad en el dominio del tiempo. Para evaluar la calidad de la regulación en un sistema cerrado con un controlador PID, se suele utilizar una acción de entrada por pasos y una serie de criterios para describir la forma del proceso transitorio (Figura 21): Error máximo de control y el tiempo Tmax en el que el error alcanza este máximo; Error absoluto integrado Integral de error al cuadrado Decremento d (esta es la relación del primer máximo al segundo, valor típico d=4 o más) notamos que otras definiciones del decremento de amortiguamiento también se encuentran en la literatura, en particular, como o como el coeficiente b/a en el exponente del exponente que describe la envolvente de oscilaciones amortiguadas; Error estático e0 (este es un error constante en el equilibrio, es decir, en el modo estacionario o estático del sistema); Tiempo de establecimiento Te con un error dado es (este es el tiempo después del cual el error de control no excede el valor establecido es; generalmente es = 1%, con menos frecuencia 2% o 5%, respectivamente, el tiempo de establecimiento se denota por T0. 01, T0.02, T0.05); Overshoot emax (este es el exceso del primer pico sobre el valor de estado estacionario de la variable, generalmente expresado como un porcentaje del valor de estado estacionario); Rise time Tr (este es el intervalo de tiempo durante el cual la variable de salida aumenta del 10 al 90% de su valor de estado estable); El período de las oscilaciones amortiguadas Tcl (estrictamente hablando, las oscilaciones amortiguadas no son periódicas, por lo que aquí se entiende por período la distancia entre dos máximos adyacentes de la característica transitoria). Figura 21 - Criterios para la calidad de la regulación en el dominio del tiempo Para los sistemas de control de movimiento, la función de rampa se usa con más frecuencia como señal de prueba que la función de salto, ya que los sistemas electromecánicos suelen tener una velocidad de respuesta limitada del valor de salida. Los criterios anteriores se utilizan para evaluar la calidad de la respuesta tanto a los cambios de consigna como al impacto de las perturbaciones externas y el ruido de medición. Criterios de calidad de frecuencia. En el dominio de la frecuencia se suelen utilizar los siguientes criterios, obtenidos a partir del gráfico de la respuesta amplitud-frecuencia de un sistema cerrado y (u) (Figura 22): Ancho de banda u-3dB (o u0.7) al nivel de -3 dB (o al nivel 1/ = 0.7) - banda de frecuencia de 0 a u-3dB = u0.7, dentro de la cual la curva de respuesta de frecuencia no disminuye más de 3 dB con respecto a su valor a frecuencia cero y(0); Oscilación M: la relación del valor máximo (pico) de la respuesta de frecuencia ymax a su valor a frecuencia cero y(0), es decir, en estado estable los valores típicos son M = 1.5...1.6; La frecuencia de resonancia del sistema wp es la frecuencia a la que la respuesta de frecuencia alcanza su máximo ymax = y(wp). Los criterios de frecuencia de los reguladores reales no pueden relacionarse sin ambigüedades con los criterios de tiempo debido a las no linealidades (generalmente estas no linealidades son de tipo "limitante") y algoritmos para eliminar el efecto de saturación integral. Sin embargo, aproximadamente es posible establecer las siguientes relaciones entre los criterios en los dominios de frecuencia y tiempo: La frecuencia de la característica de transferencia máxima de un sistema cerrado corresponde aproximadamente al período de oscilaciones amortiguadas de la respuesta a la entrada gradual - h; Cuanto más lentamente decaen las vibraciones, mayor es el índice oscilatorio M. Selección de parámetros del controlador. A teoría general Control automático la estructura del controlador se selecciona en función del modelo del objeto de control. En este caso, los objetos de control más complejos corresponden a controladores más complejos. En nuestro caso, la estructura del controlador ya está configurada: estamos considerando un controlador PID. Esta estructura es muy simple, por lo que el controlador PID no siempre puede dar buena calidad control, aunque los controladores PID se utilizan en la gran mayoría de las aplicaciones industriales. Tipos y uso de sensores. Control automático parámetros de régimen de los procesos tecnológicos producción química. El principio de funcionamiento de sensores medidos, controladores de temperatura, interruptores modulares. Medios de protección de las instalaciones eléctricas. tesis, agregada el 26/04/2014 Conocimiento de las etapas de cálculo de los ajustes de los reguladores típicos en un sistema de respuesta automática de bucle único. Características de la elección del tipo de regulador industrial. Métodos para construir la región de estabilidad en el plano de los parámetros de sintonización del controlador. tesis, agregada el 17/06/2013 Análisis de las propiedades del objeto de control, reguladores típicos y selección del tipo de regulador. Cálculo de parámetros óptimos de configuración del controlador. Dependencia de la acción regulatoria sobre la desviación del valor controlado. Reguladores integrales y proporcionales. documento final, agregado el 11/02/2014 Diseño de un dispositivo que mide la temperatura en una habitación. La elección del sensor de temperatura, el microcontrolador y la placa de depuración. Estudiar el funcionamiento del sensor de temperatura incorporado. Desarrollo de software. Organización funcional del programa. documento final, agregado el 26/12/2013 Diseño de un modelo de motor eléctrico con parámetros calculados en el entorno Simulink. Simulación del funcionamiento del motor con varias cargas (par perturbador). Cálculo de parámetros y controladores óptimos e indicadores de calidad para una serie de características. trabajo final, agregado el 24/06/2012 Cálculo de la respuesta de frecuencia compleja del objeto en el rango de frecuencia requerido. Determinación del margen de estabilidad de un cerrado sistema automático regulación. Evaluación de la calidad del control al utilizar controladores PI y PID y elegir el mejor. documento final, agregado el 12/04/2014 Característica de aceleración del objeto de regulación y determinación de parámetros que caracterizan las propiedades inerciales del objeto. Cálculo de los ajustes de los reguladores según la característica amplitud-fase del objeto regulado. Cálculo de indicadores de calidad ATS. trabajo final, agregado el 22/10/2012 Síntesis de un controlador proporcional-integral-diferencial que proporciona indicadores de precisión y calidad de control para un sistema cerrado. Característica amplitud-frecuencia, análisis dinámico y el proceso transitorio del sistema ajustado. documento final, agregado el 06/08/2013 Cálculo de los parámetros de ajuste del controlador PI para un objeto de segundo orden. Cálculo analítico e implementación del programa en el entorno MatLab, que determina los parámetros del controlador y del transitorio. Criterios para la calidad del proceso transitorio de un sistema cerrado. trabajo de laboratorio, añadido el 29/09/2016 Clasificación de las suspensiones electromagnéticas. Construcción de un modelo matemático del stand. Implementación software de un controlador proporcional-integral-diferencial. Descripción del microcontrolador ATmega 328 y la placa Arduino. Montaje y puesta en marcha del stand. El controlador PID es el controlador más simple que tiene implementaciones de hardware analógico eficientes y, por lo tanto, es el más utilizado. Para su funcionamiento, requiere establecer 3 coeficientes para un objeto específico, lo que le permite seleccionar el proceso de regulación de acuerdo con los requisitos. Con un significado físico simple y una notación matemática simple, se usa ampliamente y con frecuencia en controladores de temperatura, controladores de flujo de gas y otros sistemas donde se requiere mantener un determinado parámetro en un nivel dado, con posibles transiciones entre diferentes niveles preestablecidos. Por supuesto, existen controladores más complejos que te permiten alcanzar los parámetros establecidos con mayor precisión y rapidez y con menos sobreimpulso, además de tener en cuenta la no linealidad o histéresis del objeto controlado, pero tienen una mayor complejidad computacional y son más difíciles. para configurar A pesar de su simplicidad tanto del significado físico como de la notación matemática: En la implementación del software del controlador PID, a menudo se cometen errores que ocurren incluso en dispositivos de automatización verificados. Además, es extremadamente fácil verificar la calidad de la implementación del controlador PID. Considerar el ejemplo mas simple: termostato. Para probar su calidad, lo mejor es un objeto rápido, de baja inercia y de baja potencia. Un clásico del género: una bombilla ordinaria de 100 W con un termopar (XA) delgado atornillado. Y lo primero que debe verificar el controlador PID es la degradación del PID a solo un controlador P. Es decir, ponemos a cero los coeficientes integral y diferencial, y ponemos el proporcional al máximo. Encendemos el regulador, verificamos: la temperatura actual es de 22 grados, la configuración es de 16 grados. La lámpara no enciende. Comenzamos a comenzar a aumentar la configuración: 16.1, 16.3, 16.7, 18 ... 19 ... la luz está encendida. ¡¿Como?! ¡¿Donde?! Nos detenemos - apagado. entonces nos conocimos primer error clásico implementación del controlador PID. Una pequeña digresión matemática: recordemos una vez más la notación integral indicada anteriormente. Lo implementamos programáticamente, lo que significa discretamente. Es decir, con envidiable regularidad medimos el valor de entrada, lo comparamos con el setpoint, calculamos el efecto, emitimos, repetimos. Entonces, es necesario pasar de la forma integral al esquema de diferencias finitas. Al hacer la transición, generalmente se usa una transición frontal: El uso de una fórmula directa requerirá, en primer lugar, calcular y almacenar la integral de desajustes durante un largo período y, en segundo lugar, requerirá un trabajo de punto flotante de alta precisión (ya que el coeficiente integral Ki siempre es< 1), либо операции деления (представляя коэффициент в форме 1/Ki) большой разрядности. Всё это требует вычислительных ресурсов, коих в embedded как правило сильно ограничено… Поэтому, вместо реализации прямой схемы, реализуют рекуррентную формулу: Entonces, volvamos a nuestro controlador. Entonces, hay un objeto ajustable: una bombilla. Para controlar la energía que se le suministra, se utiliza un enfoque simple: la fuente de alimentación (220V 50Hz) se alimenta a través del triac a la carga. El triac se apaga en el momento en que la media onda pasa por cero y permanece apagado hasta que se aplica una señal al electrodo de control. Por lo tanto, cuanto antes demos una señal de control después del comienzo de la media onda, más energía de esta media onda llegará al objeto controlado. Al sincronizar correctamente la linealidad del área de media onda desde el tiempo X hasta el final de la media onda, podemos generar potencia de salida de 0 a 100 % con la precisión con la que calculamos la tabla de linealización. Entonces, podemos generar potencia de 0 a 100%. En objetos reales, a menudo es imposible entregar el 100% de la energía; por ejemplo, esto está plagado de desgaste del elemento calefactor. Por lo tanto, todos los dispositivos tienen una configuración para la potencia de salida mínima y máxima por objeto. Entonces, después de calcular U(n) de acuerdo con la fórmula anterior, se agrega otra limitación del resultado: La razón es banal: en el momento de la transición de un esquema discreto a un esquema de diferencias finitas, "ponemos entre paréntesis" la operación de calcular la integral, y en cada paso agregamos la derivada a la suma acumulada U(n-1) . Habiéndole impuesto una restricción, en realidad anulamos toda la integral calculada. (Bueno, no cuanto reseteamos, cuanto llevamos al rango de 0-100, que en este caso no es significativo). Así, diferenciamos el controlador PID, y queda el acelerador diferencial. Lo que en realidad parece un controlador diferencial simple: la potencia se suministra en proporción al cambio en el punto de ajuste o variable controlada, y no en proporción a la diferencia entre el punto de ajuste y la variable controlada. Conclusión #1: El cálculo de U(n) no se puede restringir. Para limitar la potencia suministrada al dispositivo de salida, se debe configurar una variable separada. Ahora que tenemos Urna, por poder limitado, volvemos a cargar, seguimos probando. Mientras esperamos y nos damos cuenta lentamente de que claramente nos hemos topado con algunos "Junta clásica n. ° 2"™ la bombilla se enciende lentamente, alcanza el 100 % de potencia y permanece así: no puede emitir 600 grados. Volvemos de nuevo a nuestro esquema de diferencias. U(n) = U(n-1) + Kp*(dE + ...) . La diferencia residual multiplicada por el coeficiente de proporcionalidad se suma al valor actual calculado del impacto. Teníamos un punto de ajuste de 60, una temperatura de 60, es decir, una discrepancia cero. La potencia de salida también era cero. Y luego, de repente, de repente, el punto de referencia se incrementó a 600 grados. la discrepancia se convirtió bruscamente en 540 grados, también la multiplicaron por el factor de proporcionalidad ... y salieron volando de la capacidad de almacenamiento U (n). No se ría, use matemáticas de punto fijo en lugar de punto flotante. Con una diferencia de 540 grados y trabajo a través de 1/16, con un factor de proporcionalidad de 20, obtenemos ... 540 * 20 * 16 = 172800, y si tenemos una U (n) de 16 bits, e incluso un signo uno, de hecho, como resultado del cálculo, obtuvimos A300h = -8960. Opachki. En lugar de una gran ventaja, una desventaja tangible. Conclusión #2: Los cálculos deben realizarse con el soporte de desbordamiento correcto. ¿Desbordado? Limite el número límite, ciertamente no envuelva. Entonces, aumentamos la profundidad de bits U (n), volvimos a traducir, cosimos, lanzamos. La bombilla aún no se ha enfriado por completo, está a 80 grados allí, el ajuste sigue siendo el mismo 600. La bombilla se enciende... y se apaga. Se enciende y se apaga. ¿Cómo es eso? La configuración es 600, la bombilla es 80, ¡y mantiene sus propios 80 bastante bien! ¡¿Como es eso?! obviamente salimos Error #3. Y de nuevo, una digresión lírico-matemática. Entonces, existe nuestro esquema de diferencias: U(n) = G(U(n-1), dE(n)) . Una vez más: el nuevo valor del impacto es la suma del impacto pasado y un impacto determinado, dependiendo de la diferencia entre el residual en el momento actual y el anterior. ¿Cuál es el momento anterior? ¿Y cuál es el momento previo del anterior? Bueno, recuerda la escuela. Demostración por inducción. Si es posible construir una prueba para K+1, asumiendo que la prueba para K es correcta, Y probar por separado lo que es cierto para K=0, entonces la prueba es verdadera. Entonces, ¿cómo calculamos U(0)? Una solución común: restablecer todo, leer el punto de ajuste de la memoria flash y los puntos de ajuste, esperar 1 ciclo de sondeo y leer X(0). Aquí, cero está listo, ahora estamos trabajando. Y... Y no está bien. ¿Por qué? Porque la fórmula recurrente es repelida por cambios en el residual. Y habiendo inicializado con cero y cargado los valores actuales, hemos perdido las condiciones de partida. Eso es todo: en lugar de mantener el valor absoluto de la temperatura a un nivel igual al punto de ajuste absoluto, el controlador comienza a mantener la temperatura igual a la temperatura inicial más la diferencia del punto de ajuste. Es decir, eran 80 grados y la configuración era 200, encendió el dispositivo, tiene 80. Cambió la configuración a 240, comenzó a tener 120. Inicialización adecuada del esquema de diferencias: establecer _todo_ en cero. Es decir Conclusión #3: inicializa correctamente las condiciones de inicio. ¿Es correcto? Bueno, bueno, bueno ... Una vez más ... Ponemos la configuración en 20. Estamos esperando que se enfríe ... Lo apagamos. Encender. Entonces, belleza: corriente 20, punto de ajuste 20. Ajuste el salto 600. Entremos en calor. 100, 120 ... puso la configuración en 20. Se apagó, se enfrió. Estamos esperando un poco (120… 110… 100… 90… 80…) y establecemos la configuración en 100. Vamos a calentarnos… 105 grados, apagado. Parada. ¿Y por qué tiene 105? Para nosotros, ahora solo funciona el componente proporcional. Con la implementación correcta del significado físico del proceso, el proceso oscilatorio no puede mantener la configuración más alta de lo establecido. estrictamente por debajo. Y aguanta 5 grados más de lo pedido. Es observado Broma #4. Entonces, recordemos lo que teníamos arriba: Conclusión #2: U(n) no puede ser limitado. Y Conclusión No. 3: en caso de desbordamiento, todavía hay que limitar. Sí Sí. De lo contrario, el "punto de trabajo" se desplaza por un momento limitado. ¿Qué hacer? ¿Aumentar rango? Bueno, si hay suficiente poder de cómputo. ¿Es necesario? En realidad, ¿qué tiene de malo tener U(n) = 9999,99 y no 29999,99? En general, solo que perdimos 20 000. Pero ahora, para que funcione, solo necesitamos volcar el 100 % de la potencia de todos modos, ¿verdad? Correctamente. Esto quiere decir que no hay problema con la restricción en el regimiento, siempre y cuando no nos alejemos del límite. Por lo tanto, en caso de desbordamiento, se debe establecer una bandera y al llegar, por ejemplo, a la mitad del rango (es decir, cuando U (n) después de 9999.9 cayó por debajo de 5000.00), reinicialice el circuito nuevamente. Es decir, descartar la historia, decir que n=0 y ver la Conclusión No. 3 anterior. Una mente inquisitiva ya se ha dado cuenta de que en el caso esquema completo, cuando los tres componentes no son iguales a cero, anulando el proceso iterativo en el proceso, también anulamos la integral acumulada del componente integral. Sin embargo, debido a que ponemos a cero con mucha anticipación, tendrá tiempo de acumularse durante el tiempo de producción adicional del resto. Y no es del todo correcto acumular la integral en etapas "grandes", ya que el propósito del componente integral es "seleccionar" la discrepancia que el componente proporcional no puede resolver por separado. Conclusión #4: si por algún motivo U(n) estuviera limitado, el circuito debería reiniciarse tan pronto como el circuito pareciera volver a la normalidad. En el próximo número: ¿Es necesario implementar un esquema de diferencia? Una implementación detallada de un circuito discreto directo con coeficientes ajustables simples y comprensibles, con un significado físico directo, que calcula fácilmente la acción de control a una frecuencia de 25 Hz en el procesador ADuC847 (controlador rápido de 8 bits, con el núcleo 8051), dejando mucho tiempo de CPU para otros procesos. (Las imágenes que representan fórmulas están tomadas del artículoEnviar su buen trabajo en la base de conocimiento es simple. Utilice el siguiente formulario
Documentos similares
donde E(n) = X(n) - X0(n) - es decir, la magnitud del desajuste entre el valor actual y el establecido del parámetro controlado.
el uso de una fórmula recursiva permite reducir la cantidad de cálculos y la profundidad de bits de los valores intermedios.
si no< Umin then Un:= Umin; if Un>Umax entonces Un:= Umax;
Después de eso, la Un calculada es la potencia de salida requerida en el momento actual. ¡Ta-maldita sea! Es esta implementación la que crea el error descrito anteriormente.
Encendemos el regulador, verificamos: la temperatura actual es de 22 grados, la configuración es de 16 grados. La lámpara no enciende.
Comenzamos a agregar la configuración: 16.1, 16.4, 17, 18, 20, 22, 24 (¡ups! ¡iluminado! ¡hurra!), 28, 30, 40, 60 ... ¡Belleza! ¡Laboral!
Estamos observando el proceso: resultó ser alrededor de 60, cuelga un poco de un lado a otro, pero se mantiene. Parece que todo es hermoso. Exhalamos, verificamos el control desde la PC: configuramos 600 grados. Y... La luz se apaga. ¿Cómo es eso? ¿Punto de consigna 600, corriente 60, pero la luz está apagada?
X(0) = 0, X0(0) = 0. U(0) = 0. E(0)=X(0)-X0(0)=0.
Y en el primer ciclo de cálculos, el punto de ajuste y el valor actual, por así decirlo, aparecen abruptamente:
X(1) = 80. X0(1)=200. U(1) = U(0)+Kp*(E(1)-E(0)) = U(0)+Kp*(X(1)-X0(1)-E(0)) = 0 + 20*(200 - 80 - 0) = 2400
Ahora el circuito está funcionando correctamente.
Le recomendamos que lea
 Decoración de tienda de mascotas. Negocio de tienda de mascotas. Todos los secretos de su descubrimiento. ¿Cuáles son los mejores animales para comerciar?
Decoración de tienda de mascotas. Negocio de tienda de mascotas. Todos los secretos de su descubrimiento. ¿Cuáles son los mejores animales para comerciar? Bullying - juegos para chicas
Bullying - juegos para chicas Correa de rienda para un niño para la seguridad y aprender a caminar Correa para caminar para niños: qué buscar
Correa de rienda para un niño para la seguridad y aprender a caminar Correa para caminar para niños: qué buscar Negocio de cantina: lo que necesitas para abrir una cantina
Negocio de cantina: lo que necesitas para abrir una cantina

