За размера на въртящия момент асинхронен двигателголямо влияние оказва фазовото изместване между тока I 2 и e. д.с. E 2S ротор.
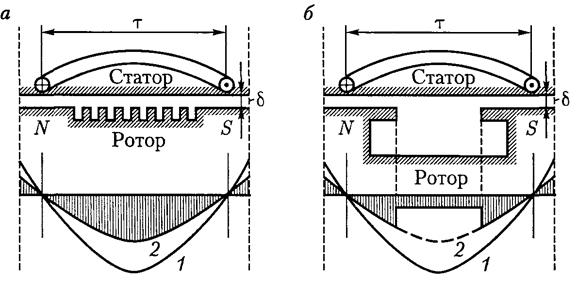
Помислете за случая, когато индуктивността на намотката на ротора е малка и следователно фазовото изместване може да бъде пренебрегнато (фиг. 223, а).
Въртящото се магнитно поле на статора тук е заменено от полето на N и S полюсите, въртящи се, да кажем, по посока на часовниковата стрелка. Използвайки правилото на дясната ръка, определяме посоката e. д.с. и токове в намотката на ротора. Роторните токове, взаимодействайки с въртящото се магнитно поле, създават въртящ момент. Посоките на силите, действащи върху проводници с ток, се определят от правилото на лявата ръка. Както се вижда от чертежа, роторът под действието на силите ще се върти в същата посока като самото въртящо се поле, тоест по посока на часовниковата стрелка.
И арматурата също е ламинат, обикновено разположен на вал. Магнитен превключвател с четка за бобина Фиг. Единична намотка е инсталирана между противоположните полюси на обикновен магнит. Когато намотката е вертикално подравнена, обичайният поток от електрони е от положителния към отрицателния извод. Захранването се извършва от четки, които са в контакт със сегментите. превключвател. От закона на Фарадей за електромагнитната индукция - правилото на лявата ръка. горната част на калерчето ще бъде подложена на сила отдясно наляво.
Помислете за втория случай, когато индуктивността на намотката на ротора е голяма. В този случай фазовото изместване между тока на ротора I 2 и e. д.с. ротор E 2S също ще бъде голям. На фиг. 223, b, магнитното поле на статора на асинхронен двигател все още е показано под формата на въртящи се по часовниковата стрелка полюси N и S. Посоката на e. д.с. остава същата като на фиг. 223, а, но поради забавянето на тока във фаза, оста магнитно полероторът вече няма да съвпада с неутралната линия на статорното поле, а ще се измести с някакъв ъгъл срещу въртенето на магнитното поле. Това ще доведе до факта, че заедно с образуването на въртящ момент, насочен в една посока, някои проводници ще създадат противоположен въртящ момент.
Долната част ще бъде подложена на сила в обратна посока. Тъй като намотката е проектирана да се върти, тези сили ще създадат въртящ момент, който ще накара намотката да се върти в посока, обратна на часовниковата стрелка. Ролята на превключвателя е да осигури потока от електрони. винаги в правилната посока, тъй като всяка страна на калерчето маркира вашите полюси. Превключвателят включва сегменти от бронз, отделени от изолационни листове против комари. Въглеродните четки влизат в контакт с превключвател.
Ъгъл на въртене Промяна на въртящия момент по време на въртене. Ако се използват две завъртания на 90° заедно с два отделни магнита също на 90°, тогава изходният въртящ момент е практически постоянен. Чрез въвеждане на втора бобина, комутаторът се нуждае от четири отделни сегмента.
От това може да се види, че общият въртящ момент на двигателя по време на фазово изместване между тока и e. д.с. роторът е по-малък, отколкото в случая, когато I 2 и E 2S са във фаза. Може да се докаже, че въртящият момент на асинхронния двигател се определя само от активната компонента на тока на ротора, т.е. тока I 2 cos и че може да се изчисли по формулата:
Пълната загуба през превключвателя се дължи както на механично триене, така и на напрежение на ръката. И двете загуби обаче са малки, ако двигателят е оборудван с вентилатор. Синхронни двигатели Синхронните двигатели са наречени така, защото работят с една скорост, тоест скоростта на въртене на магнитното поле. Може да се извърши производството на въртящо се магнитно поле. използвайки три статорни намотки, разположени на 120°, захранвани от трифазен ток. Скоростта на въртене на полето зависи от честотата на тока.
Механичният дизайн е показан схематично на фиг. Характеристика на въртящия момент за синхронен двигател. Въртящото се магнитно поле, индуцирано от намотките на статора и ротора, което може да се сравни с постоянен магнит от прътов тип, който е подравнен с единичния въртящ се поток, произведен в статора. Когато валът се задейства механично, полето, генерирано от ротора, се отстранява от центровката спрямо полето, генерирано от статора. Характеристики синхронни двигателиобикновено се представят като вариации. От уравнението по-горе може да се види, че синхронните двигатели нямат начален въртящ момент и роторът трябва да се завърти до синхронна скорост с други средства.
Ф m - магнитен поток на статора (и също приблизително равен на резултантния магнитен поток на асинхронния двигател);
Фазов ъгъл между e. д.с. и фазов ток на намотката
C е постоянен коефициент.
След смяна:
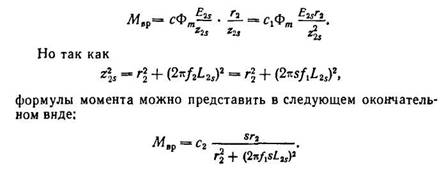
От последния израз се вижда, че въртящият момент на асинхронния двигател зависи от приплъзването.
Предимствата на синхронния двигател са леснотата, с която може да се контролира факторът на мощността. постоянна скорост на въртене, независимо от приложеното натоварване. Индукционни двигатели Статорният асинхронен двигател прилича на генератор променлив токи, ако колата се задвижва от ток, произвежда въртящ се магнитен поток. Роторът може да бъде с клетка или с хлъзгащи пръстени.
Схематично представяне на асинхронен двигател. В двигател с рамка роторът е ламиниран и проводниците имат голи или голи медни пръти. алуминият се подава през прорезите на ротора. Пръчките са заварени на всеки край с пръстени или плочи, за да се направят къси снопове от тел. Машината за плъзгане е с ламинирана сърцевина и трифазна намотка, подобен на статор, и е свързан с три пръстена на вала. Показана е схема на асинхронен двигател с три статорни намотки, разположени на 120° една от друга.
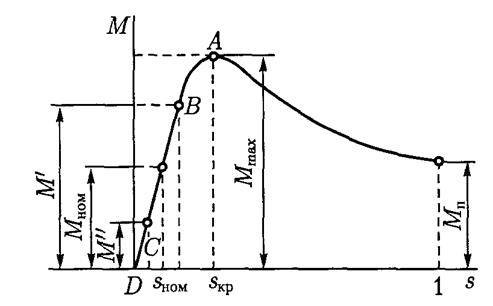
На фиг. 224 показва крива А на въртящия момент на двигателя спрямо приплъзването. От кривата се вижда, че в момента на пускане, когато s=l и n=0, въртящият момент на двигателя е малък. Това се обяснява с факта, че в момента на стартиране честотата на тока в намотката на ротора е най-висока и индуктивното съпротивление на намотката е голямо. В резултат на това cos има малка стойност (тъй като
Ако намотките на статора се захранват от трифазен ток, в статора се създава въртящо се магнитно поле. Фигурата показва намотка с един ротор. В покой, въртящото се поле ще индуцира напрежение в камбаната на ротора, когато потокът се променя. Ако бобината образува затворен контур, индуцираната ЕМП сила ще индуцира ток в бобината. Резултантната сила върху проводника, през който преминава токът, ще доведе до момент, който ще бъде. ускорете ротора. Скоростта на ротора ще се увеличи, докато електромагнитният въртящ момент се балансира. до момента на механичното натоварване.
|
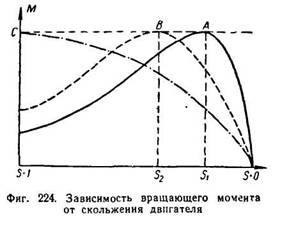
ред 0,1-0,2). Следователно, въпреки че стартовият ток е голям, стартовият въртящ момент ще бъде малък.
При известно приплъзване S 1 въртящият момент на двигателя ще има максимална стойност. С по-нататъшно намаляване на приплъзването или, с други думи, с по-нататъшно увеличаване на скоростта на въртене на двигателя, неговият въртящ момент бързо ще намалее.
Индукционният двигател никога няма да достигне синхронна скорост, тъй като това би било относително движение между ротора и въртящото се поле на намотките и това не би предизвикало електромагнитни ЕМП сили в намотките на ротора и следователно няма електромагнитен въртящ момент. Следователно асинхронните двигатели винаги работят със скорост, малко по-ниска от синхронната скорост.
Функцията въртящ момент-въртящ момент е показана на фигурата. Напълно зареден въртящ момент Плъзгащ въртящ момент Фиг. Характеристика на въртящия момент за асинхронен двигател. Когато скоростта на ротора е равна на синхронна, = 0, въртящият момент е нула. Ако скоростта на ротора падне под синхронизма, въртящият момент нараства приблизително линейно до максимална стойност, определена от общото време на натоварване и изискваща излишни загуби през ротора. Асинхронният двигател може да се счита за машина с постоянна скорост. Всъщност трудността при промяна на скоростта е една. недостатък на асинхронния двигател.
При залитане и при плъзгане s = 0 въртящият момент на двигателя също ще бъде равен на нула.
Трябва да се отбележи, че при асинхронен двигател приплъзване, равно на нула, практически не може да съществува. Това е възможно само ако роторът се захранва отвън с въртящ момент в посоката на въртене на полето на статора.
Стартов въртящ моментможе да се увеличи, ако в момента на стартиране фазовото изместване между тока и e. д.с. ротор. От формулата
Проблеми с асинхронни двигатели. стартиране на двигателя, спиране на двигателя, контрол на скоростта. Може да се разглежда и като дискретна, синхронна версия на двигателя. Броят на предприетите стъпки трябва да съответства на броя на управляващите импулси, приложени към фазите на двигателя. Въртенето всъщност се извършва с крайна времева стъпка.
Когато се прилагат статорните фази, се генерират магнитни полета, които взаимодействат с постоянните магнитни потоци, създавайки въртящи сили, които движат ротора. Фазовото захранване се извършва с помощта на импулси на полярност. interleaved, което усложнява структурата на управляващото устройство, наречено биполярна команда.
може да се види, че ако при постоянно индуктивно съпротивление на намотката на ротора се увеличи активното съпротивление, тогава самият ъгъл ще намалее, което ще доведе до факта, че въртящият момент на двигателя също ще се увеличи. Това се използва на практика за увеличаване на стартовия въртящ момент на двигателя. В момента на стартиране във веригата на ротора се въвежда активно съпротивление (стартов реостат), което след това се отстранява веднага щом двигателят увеличи скоростта.
Този тип двигател осигурява по-високи въртящи моменти на двигателя и въртящ момент за поддържане на ротора дори при липса на фазово захранване. Роторът се състои от аксиално магнетизиран цилиндричен магнит. Ъгловата стъпка варира от 0,9 до -5°, но най-често се използва 1,8°.
Определение и конструктивни елементи. При конвенционална индукционна машина магнитното поле се създава от променливи електрически токове. Намотката на тези токове се нарича първична намотка, които могат да бъдат еднофазни и многофазни. Монофазните машини са конструирани за ниска мощност до няколко киловата. Конвенционалните машини са трифазни.
Увеличаването на началния въртящ момент води до постигане на максимален въртящ момент на двигателя с повече приплъзване (точка S 2 от крива B на ФИГ. 224). Чрез увеличаване на активното съпротивление на веригата на ротора при стартиране е възможно да се постигне, че максималният въртящ момент ще бъде в момента на стартиране (s = 1 крива C).
Въртящият момент на асинхронния двигател е пропорционален на квадрата на напрежението, така че дори малко намаляване на напрежението е придружено от рязко намаляване на въртящия момент.
Втората активна част от колата е мястото, където вторична намотка. По правило неподвижната част на машината действа като индуктор, а роторът се индуцира. Конвенционалната индукционна машина е изградена в две форми: индукционни машини с пръстеновидни ротори или навиващи се ротори, където многофазна променлива роторна намотка е свързана с контактни пръстени, и индукционни машини с един или повече ротори.
Многофазната индукционна машина може да работи като двигател, генератор или електромагнитна спирачка. Използва се в най-голяма степен като двигател и е най-разпространеният електродвигател поради изключителните си качества, конструктивна простота и безопасна работа.
Мощност P 1, подадена към намотката на статора на асинхронен двигател, е равна на:
![]()
където m 1 е броят на фазите.
Статорът на двигателя има следните загуби на енергия:
1) в намотката на статора R es. =m 1 I 1 2 r 1 ;
2) в стоманата на статора и хистерезис и вихрови токове P C .
Мощността, подадена към ротора, е мощността на въртящото се магнитно поле, наричана още електромагнитна мощност P eM.
Индукционната машина е конструирана за напрежение до 10 kV, мощност от няколко вата до десетки мегавата и от няколкостотин до сто хиляди оборота в минута. Номиналните размери са посочени на индексната табела на автомобила. Активното желязо е индукционна машина, която има неподвижна част, статор, оборудван с моно или трифазен ток, както и движещата се част, ротора.
Фигура 1 показва асинхронен двигател с разглобен колянов вал. На фиг. 2 показва надлъжен разрез на асинхронен намотков двигател с намотков ротор, снабден с кафезна клетка и устройство за повдигане на четка върху контактните пръстени. Индукционната машина има постоянно желязо, което се взема възможно най-малко и се определя от механични съображения. Втулката има стойности от 0,2 до 2 mm, малки стойности, съответстващи на машини с мощност от порядъка на вата, и големи стойности за мощни машини с тежки условия на работа.
Електромагнитната мощност е равна на разликата между мощността, подадена към двигателя, и загубите в статора на двигателя, т.е.
|
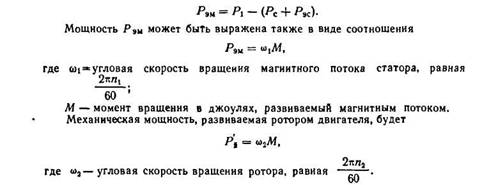
Разликата между Р eM и представлява електрическите загуби в намотката на ротора Р eP, ако пренебрегнем загубите в стоманата на ротора поради тяхната незначителност (честотата на повторно намагнитване на ротора обикновено е много малка):
Обикновени автомобили с мощността на комби и големи, мощни автомобили с тежки условия на работа. Билата са полузатворени. На машини с високо напрежениеизползват се само отворени слотове, където бобините са направени отделно. Индукционните машини се използват почти изключително в намотки и в два слоя, за да се получи възможно най-малко магнитно поле с по-високо хармонично съдържание. Статорните намотки в два слоя често се правят с къса стъпка, а ротационните двуслойни ротори - с диаметрална стъпка.
Опаковането в малки до средни клетки често се извършва с ротори с къса стъпка и двуслойни ротори с диаметрална стъпка. Транспортирането в малки и средни превозни средства се извършва масово в алуминий под налягане, както и в мед, бронз или месинг.
Следователно загубите в намотката на ротора са пропорционални на приплъзването на ротора.
Ако от механична мощностразвити от ротора, извадете механичните загуби R mx, дължащи се на триене в лагерите на ротора, триене във въздуха и т.н., както и допълнителни загуби R D, възникващи при натоварване и поради разсеяни полета на ротора, и загуби, причинени от: пулсации на магнитното поле в зъбите на статора и ротора, тогава ще има полезна мощност на вала на двигателя, която обозначаваме с P 2 .
Роторите на коляновия вал са по-прости, по-здрави и по-евтини от пръстеновидните пръстени, така че когато не са необходими специални начални скорости и промени, те се използват широко в приложения с ниска до средна мощност. За намаляване на шума се използват конвенционални слотове с възможно най-големи наклони и наклонени към генераторите, а при микромашините се използват специални конструкции, като безслотови ротори, състоящи се от няколко радиални, аксиални или тангенциални слоя, хистерезисни двигатели и купа -образни ротационни двигатели.
Ефективността на асинхронен двигател може да се определи по формулата:

От последния израз се вижда, че моментът на въртене на асинхронен двигател е пропорционален на произведението от големината на въртящия се магнитен поток, тока на ротора и косинуса на ъгъла между e. д.с. ротор и неговия ток,
Формата на автомобила зависи от вида на конструкцията на автомобила. Като цяло превозните средства с ниска до средна мощност имат монтирани на щита гърбици, както се вижда на фигурите, докато големите превозни средства имат отделни статори, прикрепени към обща основна плоча. Малките и средни автомобили обикновено имат лагери, докато големите имат плъзгащи. Когато се използва гладък ход, плъзгащи лагери се използват и за малки автомобили.
Като материал за отливане се използват чугун и стомана. Стоманите се използват както обикновено, така и когато са предназначени за намаляване на теглото на автомобила. Машините с мощност до 4 kW често са оборудвани с алуминиеви корпуси. Индукционната машина работи в режим на генератор, двигател или спирачка спрямо скоростта на ротора на ротора спрямо синхронното магнитно поле на обратното магнитно поле. Когато електромагнитната енергия навлезе в ротора и механично работи на открито, възниква двигателен режим.

От еквивалентната схема на асинхронен двигател се получава стойността на намаления ток на ротора, която даваме без доказателство.
![]()
Графично изразената зависимост на електромагнитния момент от приплъзването се нарича механична характеристикаасинхронен двигател (фиг. 3.3).
Ориз. 3.3. Механична характеристика на асинхронен двигател
Опростена формула за изчисляване на електромагнитния въртящ момент на асинхронен двигател (формула на Клос) може да се използва за изграждане механични характеристики

В този случай критичното приплъзване се определя по формулата
![]()
където λ m \u003d M max / M nom - капацитет на претоварване на двигателя.
При изчисляване на механичната характеристика трябва да се има предвид, че при стойности на приплъзване, надвишаващи критичната стойност, точността на изчисленията рязко намалява. Това се дължи на промяна в параметрите на еквивалентната верига на асинхронен двигател, причинена от магнитно насищане на зъбите на статора и ротора и увеличаване на честотата на тока в намотката на ротора.
Формата на механичните характеристики на асинхронния двигател до голяма степен зависи от големината на напрежението, приложено към намотката на статора U 1 (фиг. 3.4) и активното съпротивление на намотката на ротора r"2 (фиг. 3.5).

Ориз. 3.4. Влияние на напрежението U 1 относно механичните характеристики на асинхронния двигател
Данните, дадени в каталозите за асинхронни двигатели, обикновено не съдържат информация за параметрите на еквивалентната схема, което затруднява прилагането на формули за изчисляване на електромагнитния момент. Следователно, за да се изчисли електромагнитният момент, често се използва формулата

Ориз. 3.5. Влияние на резистентността r" 2 относно механичните характеристики на асинхронния двигател
Експлоатационните свойства на асинхронния двигател се определят от неговите експлоатационни характеристики: зависимостта на скоростта на въртене н 2, въртящ момент на вала М 2, ефективност и фактор на мощността cosφ 1 от полезния товар на двигателя Р 2 .
При изчисляване на параметрите за определяне на производителността на асинхронни двигатели се използва или графичен метод, базиран на изграждането на кръгова диаграма, или аналитичен метод.
Основата за извършване на всеки от методите за изчисляване на производителността са резултатите от тестове за отворена верига и късо съединение. Ако двигателят е проектиран, тогава тези данни се получават в процеса на неговото изчисляване.
При изчисляване на съпротивлението на резисторите r ext, използвани във вериги на статор или фазов ротор за ограничаване на стартовия ток или контрол на скоростта, използвайте принципа: за този конкретен асинхронен двигател, приплъзване спропорционално на активното съпротивление на роторната верига на този двигател. В съответствие с това равенството
(r 2 + rвътр.) /с= r2/sиме,
където r2- активно съпротивление на самата намотка на ротора при работна температура; с-приплъзване, когато резистор е вкаран в роторната верига със съпротивление rвътр.
От този израз получаваме формула за изчисляване на активното съпротивление на допълнителния резистор g до 6, необходимо за получаване на дадено повишено приплъзване спри дадено (номинално) натоварване:
r ext = r 2 (s/s nom - 1).
Има два метода за изчисляване на стартови реостати: графичен и аналитичен.
Графичен методпо-точен, но изисква изграждането на естествена механична характеристика и стартова схема на двигателя, което е свързано с голямо количество графична работа.
Аналитичен методизчисляването на стартовите реостати е по-просто, но по-малко точно. Това се дължи на факта, че методът се основава на предположението за праволинейност на работното сечение на естествената механична характеристика на асинхронен двигател. Но когато плъзгането е близо до критичното, това предположение причинява забележима грешка, която е толкова по-значима, колкото по-близо е началният начален въртящ момент М 1 до максимален въртящ момент М m ah. Следователно аналитичният метод за изчисление е приложим само за стойностите на началния начален въртящ момент М 1 < 0,7 М m ah .
Съпротивлението на резисторите на етапите на стартовия реостат:
трети r ext3 = r 2 (λ m - 1);
второ r ext2 = r add3 λ m;
първи r ext1 = rдобавям2 λ m,
където r 2 - активно съпротивление на фазовата намотка на ротора на асинхронния двигател,
където д 2 и аз 2nom - каталожни данни за избрания размер на двигателя.
Съпротивлението на стартовия реостат на неговите стъпала:
първо R PR1 = r ext1 + r ext2 + r ext3;
втори R PR2 = r ext2 + r ext3
трети R PR2 = r ext3.
За ограничаване на пусковия ток на асинхронни двигатели с ротор с катерицаприлагайте специални схеми за включването им с елементи, които ограничават пусковия ток. Всички тези методи се основават на намаляване на напрежението, приложено към намотката на статора. Най-широко използваните схеми с включване на резистори или дросели в линейните проводници на статора (виж фиг. 3.14, b). Изчисляването на необходимото съпротивление на тези елементи за дадено намаляване на пусковия ток a, спрямо естествената му стойност, се извършва по формулите:
за резистори с активно съпротивление
Р n = 
за дросели
х L= 
Импеданс на двигателя в режим на късо съединение З k, ом,
Зк = U 1 /аз П
Тук хкъм и r k - индуктивни и активни компоненти на това съпротивление
Р k = З k cosφ k ; х k =
Намаляване на изкуствения стартов момент при включване Р или Л ще бъде
α m = α 2 аз
Таблица 3.1
По този начин, ако е зададена стойността α m, която определя стойността на изкуствения стартов момент M "n, тогава да се изчислят съответните стойности Р нито x Lможете да използвате горните формули, замествайки в тях вместо α 2 аз, стойността на α m.
Електрическо съпротивлениенамотките на двигателя, посочени в каталозите, обикновено отговарят на температура от +20 °C. Но при изчисляване на характеристиките и параметрите на двигателите съпротивлението на техните намотки трябва да бъде доведено до работната температура. В съответствие с действащия стандарт работната температура се взема в зависимост от класа на топлоустойчивост електрическа изолацияприлагани в двигателя: при клас на топлоустойчивост B, работната температура е 75 ° C, а при класове на топлоустойчивост F и H - 115 ° C. Преизчисляването на съпротивлението на намотката към работната температура се извършва чрез умножаване на съпротивлението на намотката при температура 20 ° C по коефициента на нагряване k T:
r= r 20 хиляди T .
Стойностите на този коефициент се вземат в зависимост от предназначението на двигателите и техните размери (височина на оста на въртене) (Таблица 3.1).
СИНХРОННИ МАШИНИ
ОСНОВНИ ПОНЯТИЯ
Характерна особеност на синхронните машини е твърдата връзка между скоростта на ротора н 1 и AC честота в намотката на статора f 1:
н 1 = f 1 60/ Р.
С други думи, въртящото се магнитно поле на статора и ротора на синхронната машина се въртят синхронно,т.е със същата честота.
Според конструкцията си синхронните машини се разделят на изпъкнали полюси и неизпъкнали полюси. При синхронните машини с изпъкнали полюси роторът има ясно изразени полюси, върху които са разположени намотките на възбудителната намотка, захранвани постоянен ток. Характерна особеност на такива машини е разликата в магнитното съпротивление по надлъжната ос (по оста на полюсите) и по напречната ос (по оста, минаваща в междуполярното пространство). Магнитно съпротивление на статорния поток по надлъжната ос ддмного по-малко магнитно съпротивление на потока на статора напречна ос qq.В синхронните машини с невидими полюси магнитните съпротивления по надлъжната и напречната ос са еднакви, тъй като въздушната междина за тези машини по периметъра на статора е еднаква.
Дизайнът на статора на синхронна машина по принцип не се различава от статора асинхронна машина. В намотката на статора, по време на работа на машината, се индуцира ЕМП и протичат токове, които създават магнитодвижеща сила (MFS), чиято максимална стойност е
Е 1 =0,45м 1 аз 1 w 1 k rev1 / Р
Този MDS създава въртящо се магнитно поле и във въздушната междина δ машината създава магнитна индукция, чийто график на разпределение в рамките на всяко полюсно деление t зависи от конструкцията на ротора (фиг. 4.1).
За синхронна машина с изпъкнал полюс е валидно уравнението на напрежението:
Ú 1 =Ė 0 + Ė 1d+ Ė 1q+ Ė σ1 – İ 1 r 1
където Ė 0 - основната ЕМП на синхронната машина, пропорционална на главния магнитен поток на синхронната машина Е 0 ; Ė 1 d - EMF на реакцията на котвата на синхронната машина по надлъжната ос, пропорционална на MMF на реакцията на котвата по надлъжната ос Е 1d; Ė σ1 - ЕМП на реакцията на котвата по напречната ос, пропорционална на MMF на реакцията на котвата по напречната ос Е 1q; Ė σ1 - ЕМП на утечка, поради наличието на магнитен поток на утечка Е 0, стойността на тази ЕМП е пропорционална на индуктивното съпротивление на изтичането на намотката на статора х 1
Ė σ1 = йİ 1р
İ 1 r 1 - активен спад на напрежението във фазовата намотка на статора, обикновено тази стойност се пренебрегва при решаване на проблеми поради малката му стойност.
Ориз. 4.1. Графики на разпределението на магнитната индукция по напречната ос
неявен полюс ( а) и явен полюс ( b)синхронни машини:
1 - MDS график; 2 - графика на магнитната индукция
За синхронна машина с невидими полюси уравнението на напрежението има формата
Ú 1 =Ė 0 + Ė ° С- İ 1 r 1
Тук
Ė c= Ė 1 + Ė σ1
където Ė 1 - Реакционна е.д.с. на котвата на синхронна машина с имплицитни полюси. Разгледаните уравнения на напрежението съответстват на векторни диаграми на напрежението. Тези диаграми трябва да бъдат изградени, за да се определи или основната ЕДС на машината д 0 или напрежение на намотката на статора U 1. Трябва да се има предвид, че уравненията на напрежението и съответните векторни диаграми не отчитат магнитното насищане на магнитната верига на синхронна машина, което, както знаете, влияе върху стойността на индуктивните съпротивления, което ги кара да намаляване. Отчитането на това насищане е трудна задача, поради което при изчисляването на ЕМП и напреженията на синхронните машини те обикновено използват практическа диаграма EMF, който отчита състоянието на насищане на магнитната система, причинено от действието на реакцията на котвата при натоварване на синхронната машина. При конструирането на практическа диаграма на ЕМП силата на намагнитване на реакцията на арматурата не се разлага на надлъжни и напречни компоненти, следователно тази диаграма може да се използва както при изчисленията на машини с изпъкнал полюс, така и на имплицитни полюси.
При решаване на проблеми, свързани или със синхронни генератори, свързани паралелно с мрежата, или със синхронни двигатели, те използват ъглови характеристикисинхронни машини, представляващи зависимостта на електромагнитния момент М от ъгъла на натоварване θ. В този случай трябва да се помни, че в синхронните машини с изпъкнали полюси има две точки: основната М основни и реактивни М p, а в машини с невидими полюси - само основната точка:
![]()
Ъгълът на натоварване θ nom съответства на номиналния въртящ момент М наз. Максималният въртящ момент на синхронната машина определя капацитета на претоварване на синхронната машина, което е важно и за двете синхронни генераториработещи в паралел с мрежата, и за синхронни двигатели. В синхронни машини с невидими полюси максимален моментсъответства на ъгъла на натоварване θ = 90°, в машини с изпъкнал полюс θ cr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного електромагнитни моментитази машина.
За да изчислите критичния ъгъл на натоварване, който определя капацитета на претоварване на синхронните машини с изпъкнал полюс, можете да използвате израза.
Съветваме ви да прочетете
 Психологически характеристики на децата в юношеска възраст
Психологически характеристики на децата в юношеска възраст Преместване на дете в друго училище - процедурата и необходимите документи Дали да се премести дете в друго училище
Преместване на дете в друго училище - процедурата и необходимите документи Дали да се премести дете в друго училище, диагноза, лечение. Лечение на урогенитална хламидия") Урогенитална хламидия - описание, причини, симптоми (признаци), диагноза, лечение. Лечение на урогенитална хламидия
Урогенитална хламидия - описание, причини, симптоми (признаци), диагноза, лечение. Лечение на урогенитална хламидия Ползите и значението на хидроаминокиселината треонин за човешкото тяло L треонин какво
Ползите и значението на хидроаминокиселината треонин за човешкото тяло L треонин какво

