Motor likestrøm(DPT)
Enhet:
1. Stator (induktor).
2. Rotor (anker).
Statoren inkluderer: et hus, en magnetisk krets i form av poler, som eksitasjonsviklingen er plassert på.
induktor navngi den delen av maskinen som er laget for å skape et magnetfelt.
Rotoren inkluderer: en aksel, en magnetisk krets, i sporene som viklingen er plassert i, og en samler med børster.
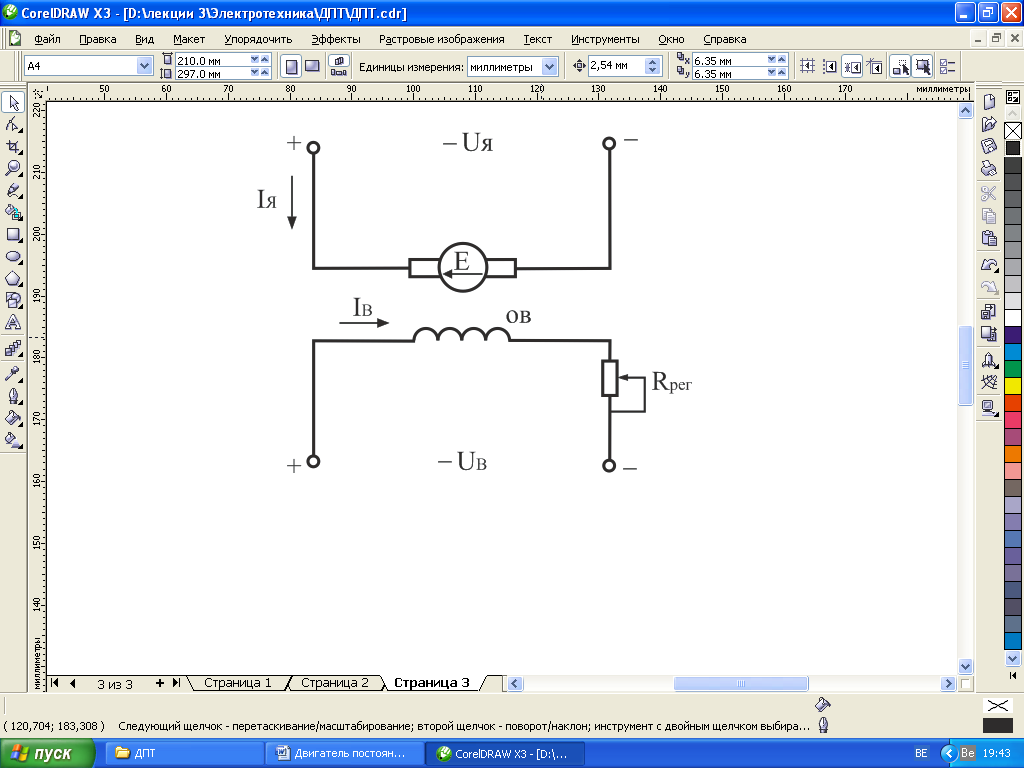
Symbol:

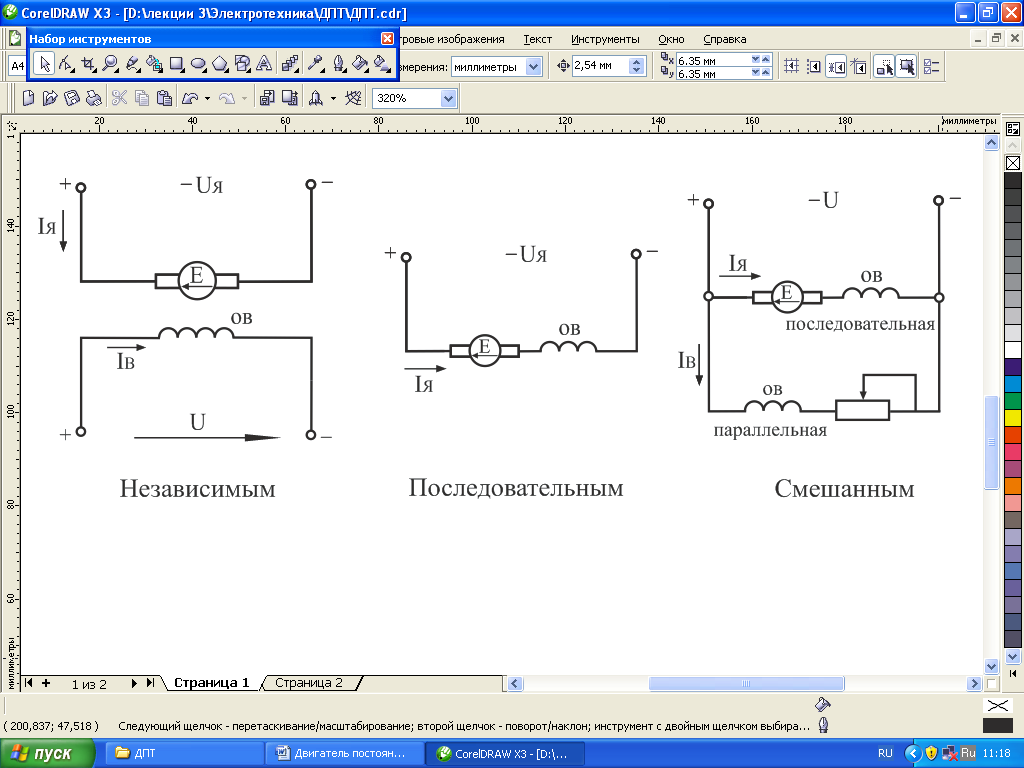
DPT-ordninger med forskjellige typer eksitasjon:
Driftsprinsipp:
U V → I V → F;
hvor I V - eksitasjonsstrøm; I I - armaturstrøm.
Samspillet mellom ankerstrømmen og den magnetiske fluksen F til statoren skaper dreiemoment:
hvor C M er designfaktoren.
Under påvirkning av M begynner rotoren å rotere, mens den krysser kraftlinjene magnetfelt, som et resultat av at en EMF induseres i den, som kalles rotasjons EMF:
Grunnleggende DPT-ligninger:
De er ligningene for rotorens elektriske likevekt:
hvor er spenningsfallet i ankerkretsen; er EMF for rotasjon.
Fra denne formelen får vi en praktisk viktig relasjon:
Erstatter i stedet for
Og vi får:
![]() .
.
I henhold til dette uttrykket er det mulig å konstruere en mekanisk karakteristikk av DPT n \u003d f (M), gitt belastningen, det vil si M, kan du finne rotasjonshastigheten som tilsvarer den. Hvis samtidig U = U nom, Ф = Ф nom har vi en naturlig mekanisk karakteristikk.
Mekanisk karakteristikk av DPT:
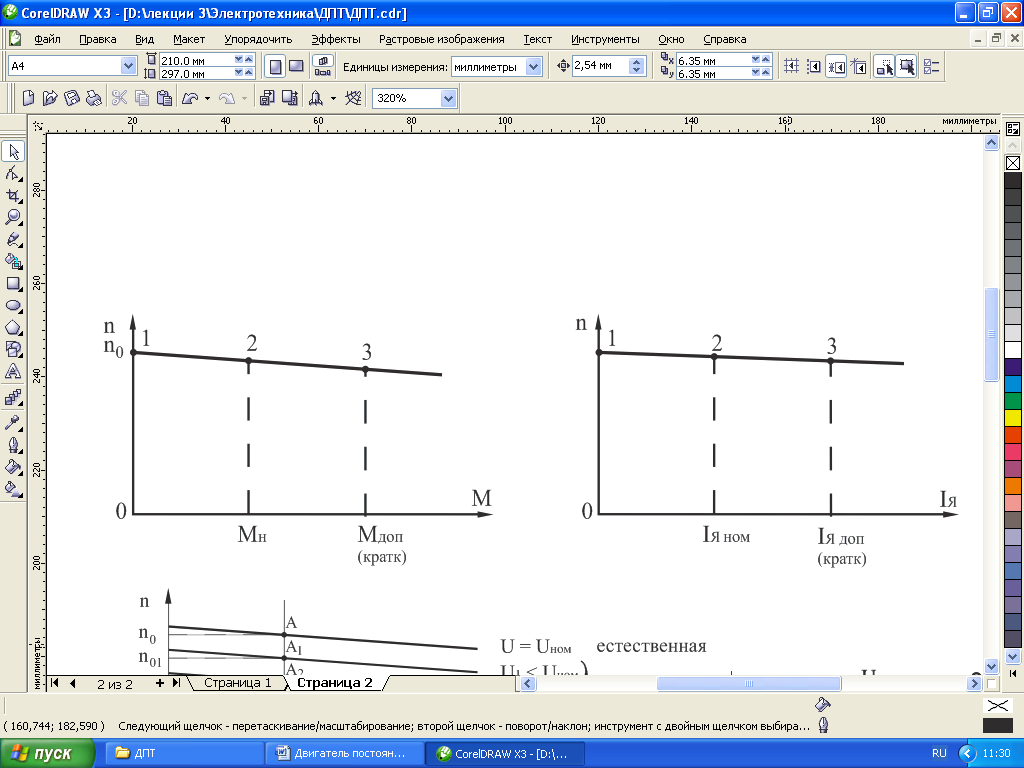
Punkt "1" - tomgang; koordinater М = 0, n = n 0 ;
"2" - nominell modus; koordinater M n, n n;
"3" - maksimal tillatt korttidsbelastning.
Tomt 1–2 - tillatt langtidsarbeid.
§ 2–3 - kun korttidsarbeid tillates.
Vanligvis legger jeg til \u003d (2 ÷ 2,5) I i nom.
DPT hastighetskontroll:
![]() ,
,
hvor er motstanden til ankerkjettingen.
Hvor kommer det fra mulighet for hastighetskontroll på tre måter: , , .
1. Vurder kunstige mekaniske egenskaper i hastighetskontroll, ved å endre inngangen.
Åpenbart, i henhold til driftsforholdene til motoren, er det mulig å endre bare i reduksjonsretningen, og derfor kan motorhastigheten bare justeres nedover, mens tomgangshastigheten (punkt "1") synker.
Egenskapene vil ha formen:
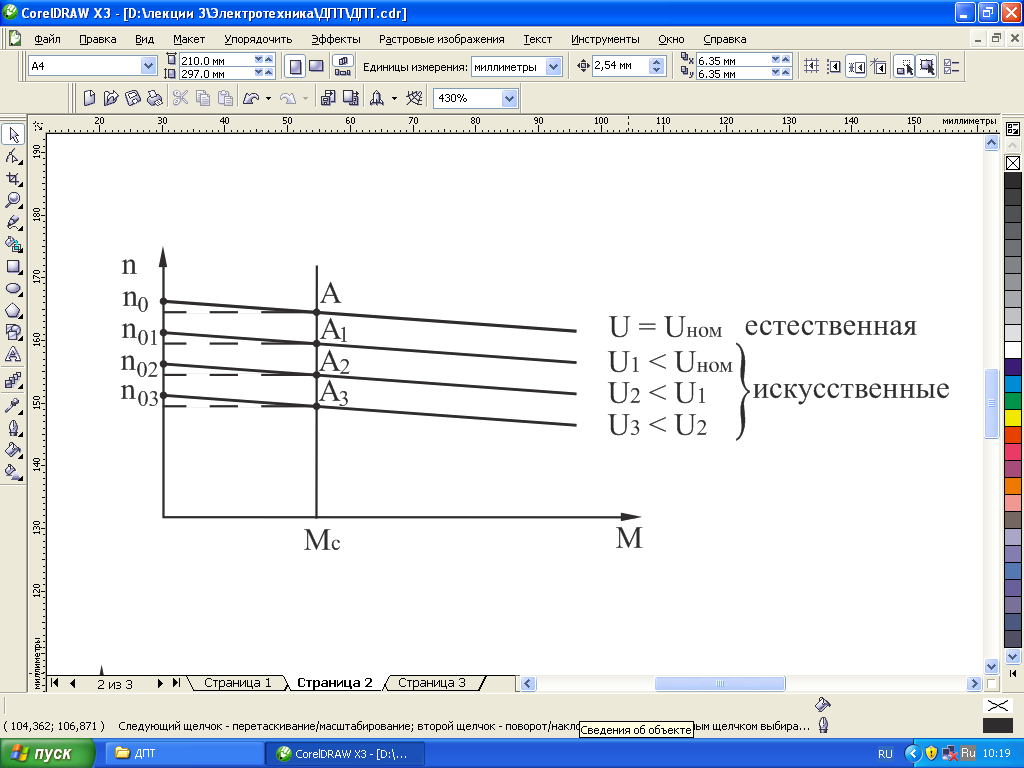
Hvis belastningen på motoren er representert av karakteristikken M C, kan du ved å endre spenningen fra til få forskjellige hastigheter fra n A til n A3.
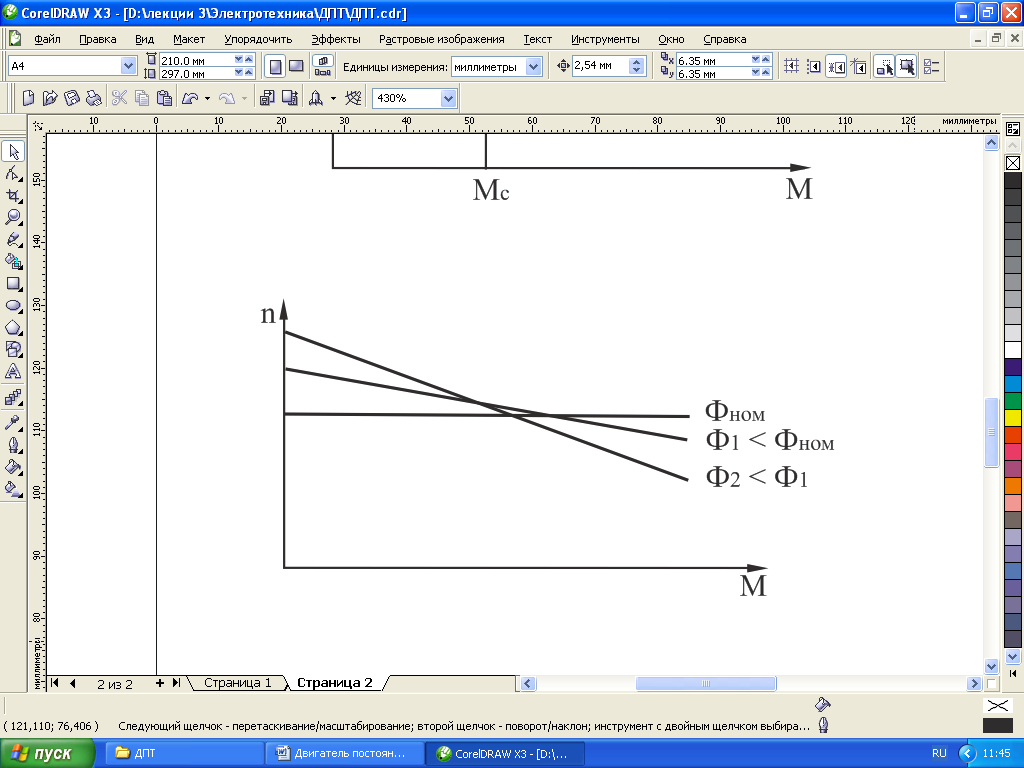
2. Hastighetskontroll ved endringer i størrelsen på den magnetiske fluksen.
Størrelsen på den magnetiske fluksen kan endres ved å bruke strømmen I V, for eksempel en reostat, bare i retning av reduksjon. En nedgang i magnetisk fluks vil føre til en økning i hastighet. Ved hjelp av den magnetiske fluksen kan hastigheten altså bare justeres oppover.
3. Vurder de mekaniske egenskapene i hastighetskontroll, endre motstanden til ankerkjettingen.
er ikke avhengig av R n, derfor har kunstige egenskaper et felles poeng .
Startstrømmen når n = 0 og E = 0 har formen og når uakseptabelt store verdier, som ikke lar motoren startes. For å redusere startstrømmene blir en ekstra motstand introdusert i ankerkretsen:
Strømmen avtar og karakteristikken har formen:

Driftsprinsipp (på eksemplet med en motor parallell eksitasjon). Hvis spenning U påføres motoren, flyter strømmen Ic gjennom eksitasjonskretsen, og strøm I i flyter gjennom ankerkretsen. Eksitasjonsstrømmen skaper MMF F in = I in W in, som eksiterer den magnetiske fluksen i maskinen F in. Armaturstrømmen skaper på sin side en magnetisk fluks av ankerreaksjonen Fi. Den resulterende magnetiske fluksen F res \u003d F in + F i.
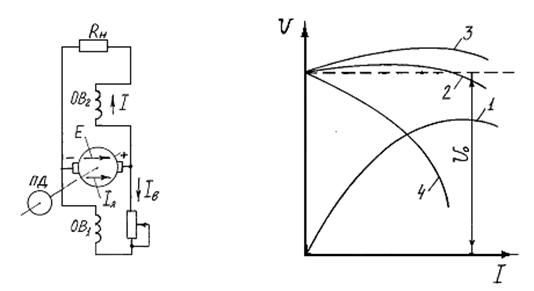
Fig.1.23 1.24
I armaturkretsen skaper strømmen I i et spenningsfall R i I i. I samsvar med loven om den elektromagnetiske kraften EMC, når strømmen I I og den magnetiske fluksen F res samvirker, dannes et dreiemoment M BP. I stabil tilstand M temp. \u003d M pr. Når ankerlederne krysser magnetfeltet F res, i samsvar med loven om elektromagnetisk induksjon EMP, induseres en EMF i dem, som er rettet mot nettspenningen U.
Klassifisering av motorer. I henhold til kretsen for å slå på eksitasjonsviklingene til hovedpolene, er DC-motorer delt inn i motorer med uavhengig, parallell, serie og blandet eksitasjon.
i motorer uavhengig eksitasjon eksitasjonsviklingen drives av en separat likespenningskilde. I parallelle magnetiseringsmotorer er feltviklingen og armaturviklingen koblet parallelt og drives fra samme kilde. I serie- og blandede magnetiseringsmotorer er det en magnetiseringsvikling koblet i serie med ankerviklingen. I laveffektsmotorer kan eksitasjonsfluksen lages ved hjelp av permanente magneter. Motorer med parallell og blandet eksitasjon finner den største applikasjonen.
Grunnleggende ligninger og mengder som karakteriserer motorer. Disse verdiene er: mekanisk kraft på akselen P 2, forsyningsspenning U, strøm forbrukt fra nettverket I, ankerstrøm I I, eksitasjonsstrøm I inn, rotasjonshastighet n, elektromagnetisk øyeblikk M um. Forholdet mellom disse mengdene er beskrevet:
Ø elektromagnetisk dreiemomentligning:
M em \u003d C m I I F;
Ø ved ligningen av den elektriske tilstanden til ankerkretsen:
U \u003d E pr + R i I i; (1.4)
E pr \u003d C E nФ;
Ø momentligning:
M em \u003d M s + M svette + M d,
hvor M s er motstandsmomentet på akselen skapt av lasten; M svette - øyeblikket av tap skapt av alle typer tap i motoren; M d - dynamisk moment skapt av treghetskrefter;
Egenskaper til motorer. Den viktigste av egenskapene er mekanisk n (M s) - avhengigheten av rotasjonshastigheten n av dreiemomentet på akselen (heretter er indeksen "c" utelatt) ved U = const, I в = const. Den viser påvirkningen av den mekaniske belastningen (dreiemomentet) på motorakselen på turtallet, noe som er spesielt viktig å kjenne til ved valg og drift av motorer. Andre motoregenskaper: justering av n (I c), høyhastighets n (I i), arbeids M, R 1, n, I, h (R 2) - vurderes ikke i detalj her.
Mekaniske egenskaper kan være naturlige eller kunstige. Under naturlig egenskaper forstås som karakteristikker tatt i fravær av ytterligere motstander i kretsen, for eksempel reostater i armatur eller eksitasjonskretser, kunstig- i nærvær av slike motstander.
Mekanisk ligningmotorens egenskaper. Den kan hentes fra (1.1). Vi erstatter i stedet for E verdien i (1.4), da
n \u003d (U - R i I i) / C E F. (1,5)
Ved å erstatte I i med verdien fra (1.2), får vi ligningen mekaniske egenskaper:
n= ![]() (1.6)
(1.6)
Typen av mekanisk karakteristikk bestemmes av arten av fluksens avhengighet av motorbelastningen, som igjen avhenger av kretsen for å slå på eksitasjonsviklingen.
Motorreversering. Motorreversering forstås som en endring i rotasjonsretningen til ankeret. Mulige måter å reversere følger av relasjon (1.2). Hvis du endrer retningen på ankerstrømmen eller strømmen til maskinen, endres tegnet, og derfor retningen på dreiemomentet. I praksis oppnås dette ved å bytte ledningene eller armaturviklingen, eller eksitasjonsviklingen. Samtidig svitsjing av utgangene til begge viklingene eller en endring i polariteten til spenningen som forsyner motoren (bortsett fra en uavhengig magnetiseringsmotor) fører imidlertid ikke til en endring i fortegnet til dreiemomentet og derfor til en endring i rotasjonsretningen.
Starter motorenelikestrøm. Det er to hovedkrav for å starte motorene: å gi dreiemomentet som er nødvendig for å starte og akselerere ankeret og å forhindre overdreven strømning gjennom ankeret under oppstart. høy strøm farlig for motoren. Tre startmetoder er praktisk mulig: direkte start, start når en reostat kobles til ankerkretsen, og start med underspenning i ankerkjettingen.
Ved direkte start slås ankerkretsen umiddelbart på til full spenning. Siden ankeret i det første startøyeblikket er stasjonært (n = 0), er det ingen tilbake-emf (E pr = C E nF). Så fra (1.4) følger det at startstrømmen til ankeret I i, p \u003d U / R i.
Siden R i \u003d 0,02 ¸ 1,10 Ohm, så I i, n \u003d (50 ¸ 100) I nom, noe som er uakseptabelt. Derfor er direkte start bare mulig for motorer med lav effekt, der I i, n (4¸6) I nom og motorakselerasjonen varer mindre enn 1 s.
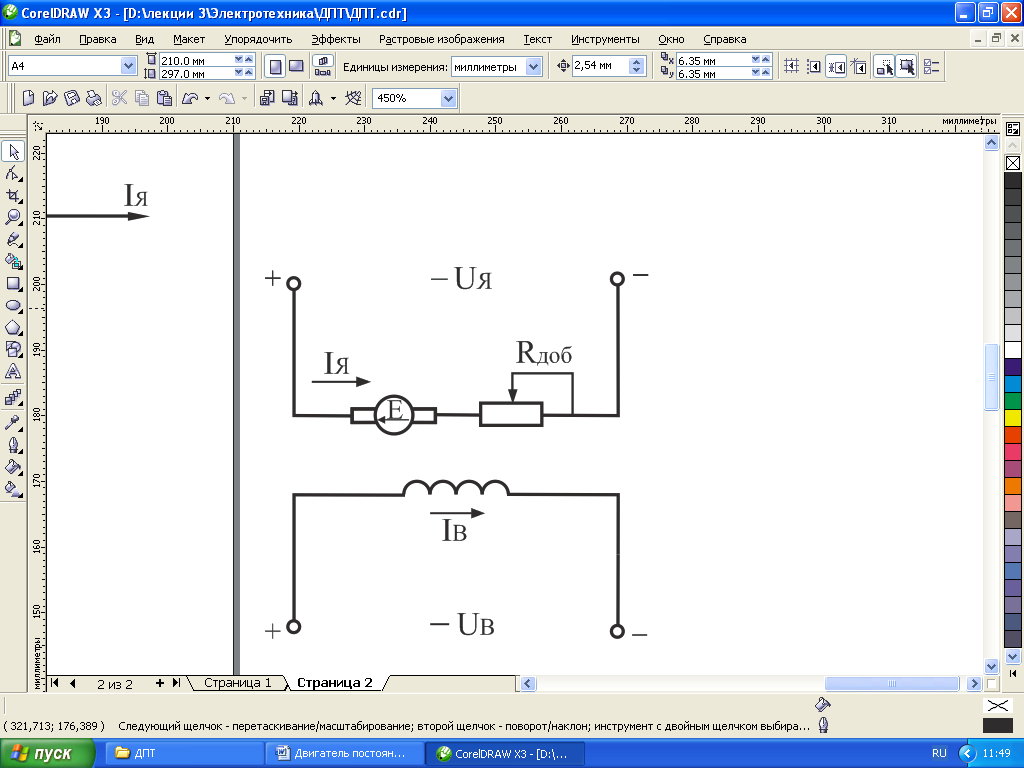
Starten når startreostaten R p slås på i serie med ankeret vil bli vurdert ved å bruke eksemplet på kretsen i fig. 1,25. Startstrømmen i dette tilfellet er:
I i, p \u003d U / (R i + R p). (1,7)
Motstand R p \u003d U / I i, p - R i er valgt slik at i det første startøyeblikket, når E pr \u003d 0, I i, p \u003d (1.4¸2.5) I nom (et større antall refererer til til motorer mindre kraft).
Når ankeret akselererer, øker E pr, noe som reduserer spenningen ved ankeret (dvs. telleren (1.7) reduseres), og motstanden til reostaten Rp blir utgitt.
Før start vises reostaten R p, noe som er nødvendig for å sikre maksimal flyt og derfor dreiemoment ved oppstart (M p \u003d C m I I, p F). Når ankeret akselererer, introduseres reostaten Rp til ønsket hastighet er nådd.
Å starte med en begrenset startstrøm er mulig når motorankeret drives fra en separat kilde (generator, likeretter) med justerbar spenning. Startstrømbegrensning og jevn akselerasjon av motoren er gitt av en gradvis økning i ankerspenningen fra null til den nødvendige verdien.
Metoden som vurderes finner anvendelse i kontroll- og reguleringssystemer for kraftige likestrømsmotorer (se avsnitt 1.14.3).
§ 115. KARAKTERISTIKKER AV DC-MOTORER
Arbeidsegenskapene til motorer bestemmes av deres ytelsesegenskaper, som er avhengighetene av antall omdreininger t, dreiemoment Me, forbrukt strøm I, effekt P1 og effektivitet η på den nyttige kraften på akselen P2- Disse avhengighetene tilsvarer den naturlige forholdene til motoren, dvs. maskinen er ikke regulert og nettspenningen forblir konstant. Så
som med en endring i nyttekraften P2 (dvs. belastningen på akselen), endres også strømmen i ankeret
maskiner, er ytelsesegenskapene ofte plottet som en funksjon av ankerstrømmen. Avhengighet av dreiemoment og rotasjonshastighet på strømmen i ankeret for motoren med parallell eksitasjon er vist i fig. 152, og diagrammet på hundre er vist ovenfor (se fig. 151).
Motorhastigheten bestemmes av følgende uttrykk:
> Med en økning i belastningen på motorakselen øker også strømmen i ankeret. Dette forårsaker en økning i spenningsfallet over motstanden til ankerviklingen og børstekontaktene.
Siden eksitasjonsstrømmen forblir konstant (maskinen er uregulert), er den magnetiske fluksen også konstant. Men med en økning i strømmen i ankeret, øker den demagnetiserende effekten av ankerreaksjonsfluksen og den magnetiske fluksen Ф avtar noe. En økning i Iarya forårsaker en reduksjon i motorhastigheten, og en reduksjon i Ф øker hastigheten. Typisk påvirker spenningsfallet hastighetsendringen i litt større grad enn ankerresponsen, slik at når ankerstrømmen øker, synker hastigheten. Endringen i hastigheten til denne typen motor er ubetydelig og overstiger ikke 5 % når belastningen endres fra null til nominell, dvs. parallelle magnetiseringsmotorer har en stiv hastighetskarakteristikk.
Med en konstant magnetisk fluks vil dreiemomentets avhengighet av strømmen i ankeret representeres av en rett linje. Men under påvirkning

Dreiemomentet til ankerreaksjonsmotoren med en økning i belastningen er en liten reduksjon i den magnetiske fluksen og avhengigheten av øyeblikket vil gå litt under en rett linje.
Diagrammet for den sekvensielle eksitasjonsmotoren er vist i fig. 153. Startreostaten til denne motoren har bare to klemmer, siden eksitasjonsviklingen og ankeret danner én seriekrets. Motorens egenskaper er vist i fig. 154. Motorturtall sekvensiell eksitasjon er definert av følgende uttrykk:
![]()
hvor rc er motstanden til serieeksitasjonsviklingen. I en serieeksitasjonsmotor forblir den magnetiske fluksen ikke konstant, men endres dramatisk med lastendringer, noe som forårsaker en betydelig endring i hastighet. Siden spenningsfallet i ankermotstanden og i feltviklingen er veldig lite sammenlignet med den påførte spenningen, kan antall omdreininger tilnærmet bestemmes ved følgende uttrykk:
Hvis vi neglisjerer metningen av stål, kan vi vurdere den magnetiske fluksen proporsjonal med strømmen i feltviklingen, som er lik strømmen i ankeret. Følgelig, for en serieeksitasjonsmotor, er rotasjonshastigheten omvendt proporsjonal med strømmen i ankeret og antall omdreininger avtar kraftig med økende belastning, dvs. motoren har en myk hastighetskarakteristikk. Når belastningen avtar, øker motorhastigheten. Ved tomgang (Ia = 0), øker motorturtallet i det uendelige, det vil si at motoren går i overgir.
En karakteristisk egenskap for serieeksitasjonsmotorer er således at lastreduksjon ikke er tillatt, dvs. tomgang eller ved lav belastning. Motoren har et minimum tillatt belastning, som er 25-30 % av det nominelle. Når belastningen er mindre enn den minste tillatte hastigheten til motoren øker kraftig, noe som kan forårsake ødeleggelse. Derfor, når avfall eller brå belastningsreduksjoner er mulig, er bruken av serieeksiterte motorer uakseptabelt.
I svært små motorer vil ikke belastningsreduksjon forårsake løping, da de mekaniske tapene til motoren vil være tilstrekkelig. tung last for han.
Dreiemomentet til serieeksitasjonsmotoren, under hensyntagen til det proporsjonale forholdet mellom den magnetiske fluksen og strømmen i ankeret (F \u003d C "Ia), kan bestemmes av følgende uttrykk:
hvor K'=KC'
de. dreiemoment er proporsjonalt med kvadratet av strømmen. Men ved høye strømmer påvirker metningen av stålet og øyeblikkets avhengighet nærmer seg en rett linje. Dermed utvikler motorer av denne typen store dreiemomenter ved lave hastigheter, noe som er essensielt ved start av store treghetsmasser og overbelastninger. Disse motorene er mye brukt i transport- og løfteapplikasjoner.
Med blandet eksitasjon er både konsonant- og tellerinnkobling av eksitasjonsviklingene mulig.
Motorer med motsatte viklinger er ikke mye brukt, da de har dårlige startegenskaper og er ustabile.
Hastighetskarakteristikkene til blandede magnetiseringsmotorer inntar en mellomposisjon mellom egenskapene til parallelle og serieeksitasjonsmotorer.
Med en økning i ankerstrøm avtar antall ankeromdreininger i større grad enn for parallelle magnetiseringsmotorer, på grunn av en økning i magnetisk fluks forårsaket av en økning i strøm i seriefeltviklingen. Ved tomgang går ikke motoren med blandet eksitasjon løpsk, siden den magnetiske fluksen ikke synker til null på grunn av tilstedeværelsen av en parallell feltvikling.
Ved økt belastning i blandede magnetiseringsmotorer øker den magnetiske fluksen og dreiemomentet øker i større grad enn i parallelle magnetiseringsmotorer, men i mindre grad enn i serieeksitasjonsmotorer.
1. Enheten til DC-maskiner.
DC-maskiner, som kan fungere både som motor og som generator, har en rekke fordeler. Ved start av motoren genereres et stort startmoment. Derfor er slike motorer iroko brukt som trekkraft i elektriske kjøretøy. Brede grenser og jevn hastighetsregulering bestemmer bruken av DC-motorer i en rekke automatiske kontrollsystemer.
DC-generatorer brukes til å drive forskjellige kraftenheter (spesielt høykvalitets sveisemaskiner). Kraften til DC-maskiner er veldig forskjellig:
fra noen få watt til titalls kilowatt. I transport brukes motorer med en spenning på 550 V og en effekt på 40 - 45 kW (trikker), med en spenning på 1500 V og en effekt på opptil 12 000 kW (elektriske lokomotiver). Effektiviteten i DC-maskiner er jo høyere, jo større kraft. Med effekt opp til 100 W effektivitet = 62 %, med effekt opp til 100 kW når effektiviteten 91 %. Ulempen med DC-maskiner er tilstedeværelsen av en børstesamlerenhet, som er en av de mest upålitelige maskinkomponentene. Tenk på enheten til den enkleste DC-maskinen:
1 - poler, vanligvis representerer en spole med en kjerne,
2 - anker (eller rotor) - roterende del,
3 - ledere i ankerets spor.
Den faste delen som polene er festet på kalles statoren eller induktoren. Induktoren tjener til å skape hovedmagnetfeltet til maskinen. GN - geometrisk nøytral, en linje som går i midten mellom tilstøtende poler.
Den viktigste designfunksjonen til DC-maskiner er tilstedeværelsen av en børstesamlerenhet: 1 - børste, 2 - samleplate. Utgangene til individuelle seksjoner av armaturviklingen er egnet for kollektorplatene. Børstesamlerenheten utfører:
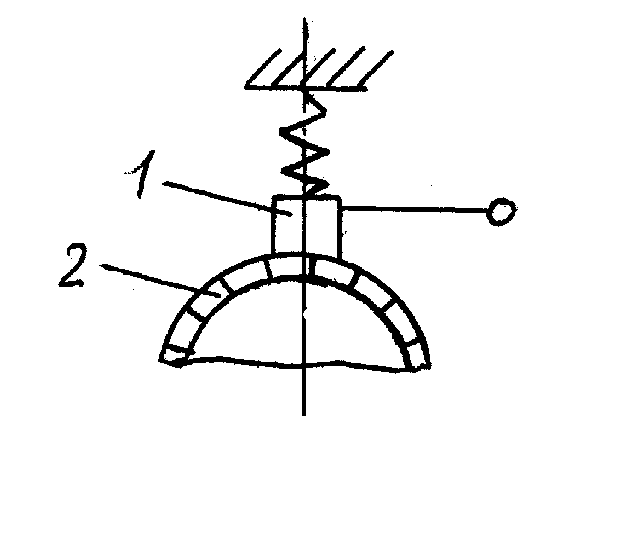
Glidende kontakt mellom faste ytre ledninger og roterende deler av ankerviklingen,
Retting av strøm i generatormodus,
Konvertering av likestrøm til vekselstrøm (invertering) i motormodus.
DC-maskiner er, som mange andre elektriske maskiner, reversible, d.v.s. den samme maskinen kan fungere både som generator og som motor.
2. Prinsippet for drift av generator og motor.
I generatormodus roterer ankeret til maskinen under påvirkning av et eksternt øyeblikk. Mellom statorens poler er det en konstant magnetisk fluks som trenger inn i ankeret. Armaturviklingslederne beveger seg i et magnetfelt, og derfor induseres en EMF i dem, hvis retning kan bestemmes av "høyrehånds"-regelen. I dette tilfellet oppstår et positivt potensial på den ene børsten i forhold til den andre. Hvis en last er koblet til generatorterminalene, vil strøm flyte i den. Etter å ha dreid ankeret gjennom en viss vinkel, vil børstene kobles til et annet par plater, dvs. koblet til en annen omdreining av armaturviklingen, hvor EMF vil ha samme retning. Dermed genererer generatoren
elektrisk strøm, og retningen til denne strømmen som flyter gjennom lasten endres ikke.
Når lasten er koblet til generatoren og med ankerstrømmens fremkomst, oppstår et elektromagnetisk dreiemoment på akselen, rettet mot ankerets rotasjonsretning. I motormodus leveres klemmene til maskinen med konstant trykk, og strømmen flyter gjennom armaturviklingen. Lederne til armaturviklingen er i magnetfeltet til maskinen skapt av eksitasjonsstrømmen og derfor på dem i henhold til loven
Ampere, krefter vil handle. Kombinasjonen av disse kreftene skaper et dreiemoment, under påvirkning av hvilket ankeret vil rotere. Når ankeret roterer, induseres en EMF i viklingen, som er rettet mot strømmen, og derfor kalles den for motorer bak-EMF.
3. Armatur emk og dreiemoment ligninger.
Tenk på en av lederne i ankersporet. La den bevege seg (under rotasjonen av ankeret) med en lineær hastighet V, så induseres en EMF i denne lederen:
E \u003d V cf l i V sin  ,
,
hvor \u003d 90, la - lengden på den aktive delen av ankeret, V cf - den gjennomsnittlige magnetfeltinduksjonen i gapet.
La 2a være antall parallelle grener. Siden EMF er lik EMF for en gren, kan vi skrive:

der E i er den nødvendige EMF for ankeret, N er antallet av alle ankerledere.
hvor Ф er den magnetiske fluksen til en pol, og S er området som penetreres av denne fluksen, da

her er p antall polpar (p = 1,2, ...).
Hastigheten V kan uttrykkes i form av ankerhastigheten n:
Substituere de resulterende uttrykkene i formelen for E i:

så får vi endelig:
E i \u003d C E F n.
Det kan sees at ankerets EMF er proporsjonal med rotasjonsfrekvensen til ankeret og den magnetiske fluksen til polene. Ved å bruke Amperes lov finner vi kraften som eksitasjonsfeltet virker på en armaturleder:
F = V cf l i I synd
,
her = 90 , I - strøm i lederen.
Denne kraften skaper et dreiemoment:
hvor D er ankerdiameteren. Multiplisere med det totale antallet ledere N, får vi det totale momentet:
Den gjennomsnittlige induksjonen In cf, som før, får vi ved å dele den magnetiske fluksen til en pol med arealet som er gjennomsyret av denne fluksen:
Siden ankerstrømmen sprer seg langs parallelle grener, bestemmes strømmen i en leder av uttrykket:

Ved å erstatte uttrykkene for B cf og I i formelen for det generelle øyeblikket, får vi:

Hvis vi introduserer en konstruktiv koeffisient
så kan vi endelig skrive:
Som du kan se, er det elektromagnetiske momentet til DC-maskinen proporsjonalt med den magnetiske fluksen til polene og armaturstrømmen.

Armatur-EMF-formelen Ea oppnådd ovenfor gir en viss gjennomsnittsverdi av EMF. Faktisk svinger verdien (pulser) mellom to grenseverdier - E min og E max. Når ankeret roterer, blir en del av svingene, som kortsluttes av børstene, slått av fra de parallelle grenene, og i løpet av tiden roteres ankeret gjennom en vinkel som tilsvarer én samleplate, summen av de øyeblikkelige EMF-verdiene har tid til å endre seg noe. Maksimalverdien av de resulterende EMF-pulseringene E = 0,5 (E max -E min) avhenger av antall kollektorplater. For eksempel, med en økning i dette tallet fra 8 til 40, synker verdien av E fra 4V til 0,16V.
4. Armaturreaksjon i DC-maskiner.
Når en DC-maskin går på tomgang, skapes magnetfeltet kun av polviklingene. Utseendet til strøm i armaturlederne under belastning er ledsaget av utseendet til et magnetisk felt av armaturet. Siden strømretningen i lederne mellom børstene er uendret, er feltet til det roterende ankeret fast i forhold til børstene og eksitasjonspolene.
Armaturviklingen blir analog med en solenoid hvis akse faller sammen med børstelinjen, derfor, når børstene er installert på geometriske nøytrale, er armaturstrømmen på tvers av eksitasjonsstrømmen, og dens effekt på sistnevnte kalles den tverrgående ankerreaksjonen . Etter å ha bygget vektoren til den resulterende strømmen, ser vi at den nå roterer rundt den geometriske aksen til hovedpolene. Maskinens felt blir asymmetrisk, de fysiske nøytrale roterer i forhold til de geometriske. I generatoren er de forskjøvet i ankerets rotasjonsretning, i motoren - mot ankerets rotasjonsretning.
Under den fysiske nøytralen vil vi forstå linjen som går gjennom midten av ankeret og lederen til ankerviklingen, der EMF indusert av den resulterende magnetiske fluksen er null. Den laterale reaksjonen til ankeret har liten effekt på ytelsen til maskinen, denne effekten tas vanligvis ikke i betraktning. Imidlertid, når børstene er forskjøvet fra den geometriske nøytralen, vises en langsgående komponent i armaturfluksen, dens effekt på polfluksen kalles den langsgående armaturreaksjonen. Det kan være både magnetiserende og avmagnetiserende i naturen. Generelt fører ankerreaksjonen til en forvrengning av feltet under polene og en endring i fluksen til polene. Førstnevnte kan forårsake en betydelig økning i gnistdannelse under børstene (opp til utseendet til en allsidig brann på kollektoren), og sistnevnte i generatoren endrer spenningen ved terminalene, og i motoren dreiemomentet og ankerhastigheten .
For å svekke ankerreaksjonen økes luftgapet mellom statoren og ankeret, spesielle kortsluttede svinger brukes i sporene til polstykkene. I maskiner med høy effekt brukes en spesiell kompensasjonsvikling til dette formålet. Den passer inn i sporene til polstykkene, og er koblet i serie til ankerkretsen, dens strømning balanserer den langsgående strømmen til ankeret.
Vi anbefaler deg å lese
 Psykologiske kjennetegn ved barn i ungdomsårene
Psykologiske kjennetegn ved barn i ungdomsårene Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole
Overføring av et barn til en annen skole - prosedyren og nødvendige dokumenter Om et barn skal overføres til en annen skole, diagnose, behandling Behandling av urogenital klamydia") Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia
Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva
Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin hva

