Monissa tapauksissa kolmivaiheisia asynkronimoottoreita käytetään käytöissä, jotka eivät vaadi nopeudensäätöä. Mutta asynkronisilla moottoreilla on arvokkaita etuja: luotettavuus, alhaiset kustannukset, yksinkertainen rakenne, korkea hyötysuhde ja suhteellisen pieni paino. Näistä syistä on luonnollista yrittää soveltaa niitä myös nopeudensäädäntöihin.
Tarvitsemme tarkempaa tietoa siitä, mikä on toivomasi lopputulos. merkki; On olemassa useita tapoja nopeuttaa kolmivaiheinen moottori. Vähemmän invasiivinen ratkaisu olisi lisätä taajuusmuuttaja, jota joskus kutsutaan nopeusmuuntimeksi. Muista, että nopeuden kasvaessa vääntömomentti pienenee, jos ylität moottorin nimellisnopeuden. Autamme mielellämme sinua määrittämään, mikä näistä lähestymistavoista sopii parhaiten sovellukseesi. Jos moottorissasi on keskipakokytkin käynnistyspiirissä, et voi lisätä moottorin nopeutta paljon.
- Tämä on melko yleinen kysymys.
- Jos tarvitset lisäinformaatio, Soita meille.
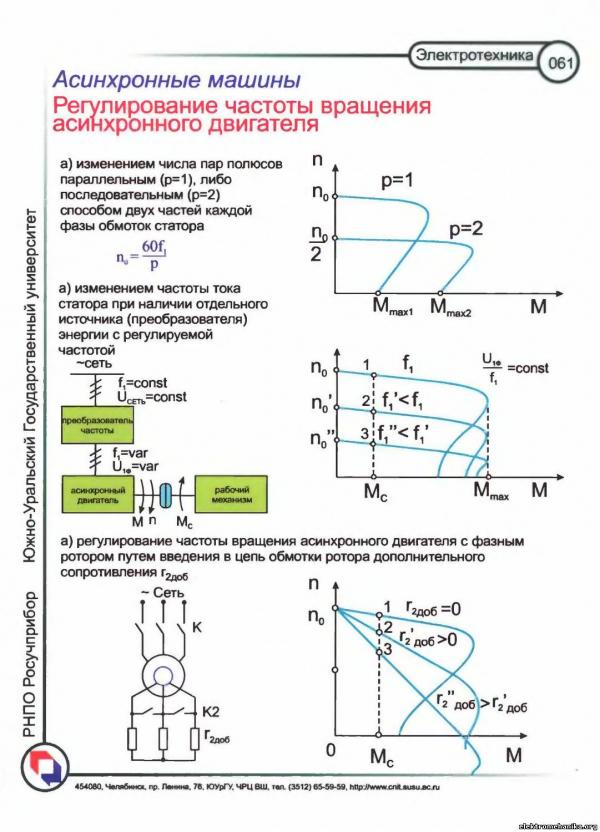
Asynkronisten moottoreiden nopeuden ohjaamiseen oravahäkkiroottorilla käytetään yleensä taajuudensäätömenetelmää, joka on tasainen nopeudensäätö magneettikenttä säätämällä virran taajuutta staattorikäämeissä ja menetelmällä muuttaa pyörivän magneettikentän napaparien lukumäärää, jossa magneettikentän pyörimistaajuus muuttuu äkillisesti.
Voiko ongelma olla sähkömoottorin erittäin alhaisella nopeudella 300 rpm? Jopa korkeudella, jossa käytät moottoria, on merkitystä, koska korkeammissa korkeuksissa ilma on vähemmän tiheää eikä sen vuoksi tuota samaa jäähdytystehoa. Vuoristoalueilla voi olla tarpeen vähentää kuormaa jopa täydellä nopeudella riittävän moottorin jäähdytyksen varmistamiseksi. Sovelluksesi erityispiirteet edellyttävät todennäköisesti tehokkaan moottorin ja vakionopeuden tuulettimen käyttöä. Lisätuulettimen hinta riippuu moottorin rungon koosta ja saattaa vaatia jopa valmistusta sen asennuksen selvittämiseksi. Kiitos kaikista neuvoista, joita voit antaa minulle!
Vaiheroottorilla olevien asynkronisten moottoreiden pyörimisnopeuden ohjaamiseen käytetään reostaattista ohjausmenetelmää, joka on roottorin luiston tasainen ohjaus muuttamalla sen vaihekäämien aktiivista vastusta.
Taajuuden säätö. Lupaavin menetelmä nopeudensäätöön induktiomoottori On staattorin vaihtotaajuuden säätö moottori. Pyörimiskentän kulmanopeus n = 2 f/r. Siksi virran taajuuden f muuttuessa kentän kulmanopeus muuttuu suhteessa. Virran taajuussäätöä suoritettaessa on kuitenkin otettava huomioon, että samanaikainen jännitteensäätö on tarpeen. Tämä johtuu siitä, että lausekkeen (14.10) mukaisesti vaiheen EMF ja siten syöttöjännite ovat verrannollisia virran taajuuteen ja virtaukseen. Koska vuon on pysyttävä samana kaikissa tiloissa, jännitteen tulee olla (ottamatta huomioon koneen jännitehäviöitä) verrannollinen taajuuteen. Lisäksi tämä on välttämätöntä, jotta moottorin nopeuden muuttuessa sen vääntömomentti ei muutu.
monipiste yksivaiheinen moottori ei itse asiassa ole moninopeuksinen moottori, se on monijännitemoottori. Käytettäessä käämihanoja piirin vastuksen lisäämiseen, moottori heikkenee ja kuormitus saa moottorin hidastumaan. Poista kuorma ja moottori käy samalla nopeudella valitusta nosturista riippumatta. Jos moottoria käytetään puhallinmoottorina, tulolinjaan voidaan lisätä reostaatti lisäämällä ulkoinen vastus ja vaimentamalla moottoria halutun nopeuden saamiseksi. Jos haluat tiettyjä nopeuksia nopeusalueen sijaan, voit lisätä näyte- ja ilmanvastusmittauksia. Muista vain, että jos työmääräsi muuttuu, myös nopeudesi muuttuu. Voimmeko vaihtaa 3-vaiheisen induktiomoottorin napaa?
Jotta voidaan arvioida vääntömomentin riippuvuuden luonnetta staattorikäämien virran taajuudesta ja sen jännitteestä, jätämme yhtälössä (14.28) huomioimatta staattorikäämin aktiivisen resistanssin g l ja induktiiviset reaktanssit staattorikäämien x pac 1 ja roottorin x ras 2 sironta ja käytä lauseketta luistotaajuudelle (14.13):
Mvr= = A,
Kerro minulle seuraukset. Kyllä, voit käämittää käämityksen uudelleen magneettinapojen vaihtamiseksi, mutta tällöin sinun on muutettava joitain muita käämin ominaisuuksia. Napojen määrän lisäämiseksi sinun on muutettava aluetta, langan kokoa ja kierroksia kelaa kohti, jotta takaraudan ja hampaan magneettivuon tiheys pysyy normaaleissa standardeissa. Säilyttämällä sama kierrosluku heikentää moottoria, mikä vähentää sen kykyä tuottaa vääntömomenttia. Induktiomoottori, jossa oravahäkkiroottori luo loistavan generaattorin, kun se liikkuu synkronisen nopeudensa yläpuolella.
missä MUTTA= vakio
Siksi virran taajuutta muuttaessa, jotta vääntömomentti pysyy vakiona, on tarpeen muuttaa suhteellisesti staattorin jännitettä; toisin sanoen ehto moottorin tasaisen vääntömomentin ylläpitämiselle taajuussäädön aikana on U 1 /f= vakio Jos säädät virran ja jännitteen taajuutta noudattaen määritettyä tilaa, moottorin mekaaniset ominaisuudet pysyvät jäykinä ja maksimi hetki lähes riippumaton taajuudesta (se pienenee merkittävästi vain suhteellisen matalat taajuudet). Samalla teho muuttuu suhteessa virran taajuuteen, koska P 2 = M vr. Esimerkiksi kun virran taajuutta pienennetään kertoimella 2, myös moottorin teho akselilla puolittuu.
Samat ominaisuudet, jotka tekevät tästä moottorista halutun muun tyyppisiin moottoreihin nähden, tekevät induktiogeneraattorista halutun muun tyyppisiin generaattoreihin verrattuna, nimittäin oravan rungon rakenteelle luontainen lujuus ja ohjausjärjestelmien yksinkertaisuus.
Oikosulkumoottorista tulee generaattori, kun se liitetään verkkoon ja sitten sitä käytetään synkronisen nopeuden yläpuolella jollain voimanlähteellä. Ensimmäinen moottori voi olla turbiini, moottori, tuulimylly tai mikä tahansa, joka voi tarjota vääntömomentin ja nopeuden, joka tarvitaan moottorin ajamiseen ylinopeustilaan.
Säädä muuttamalla napaparien lukumäärää. Oikosulkumoottorin kulmanopeuden asteittainen muutos laajalla alueella on mahdollista oikosulkumoottorin suunnittelun monimutkaisemisen ja kustannusten lisäämisen kustannuksella - tämä on säätö vaihtamalla moottorin napaparien lukumäärää.
Vakioverkkotaajuudella pyörivän kentän kulmanopeus riippuu vain tämän kentän napaparien lukumäärästä, jonka määrää staattorikäämi. Jos staattoriin asetetaan kaksi erillistä käämiä - yksi muodostuu R höyryä, ja toinen muodostaa R" napaparia, niin sisällyttämällä verkkoon ensimmäinen tai toinen käämi, saamme kentän pyörimistaajuuden:
Suorituskyky generaattorina on hieman erilainen kuin moottorina käytetty. Erot voivat olla niin pieniä, ettei niitä voida havaita tavanomaisilla kenttämittausmenetelmillä. Induktiogeneraattorin tärkein etu on taajuuden säätö. Nopeutta pitää hallita synkroninen generaattori jotta sen taajuus ei poikkea lineaarisesta taajuudesta. Lähtötaajuutta ja voltteja ohjataan induktiogeneraattoreiden tehojärjestelmällä ja ne ovat riippumattomia nopeuden muutoksista.
N 1 \u003d 60f / p tai n" 1 = 60f/p", Näin ollen
n1/p" 1 =p"/p,
myös moottorin roottorin nopeudet vaihtelevat vastaavasti. Tässä tapauksessa moottorin roottorin käämitys on tehtävä oravapyörän kaltaiseksi.
Staattorikäämien napojen lukumäärä ei tässä tapauksessa liity toisiinsa, ja se voidaan valita mikä tahansa moottorin käyttöolosuhteista riippuen. Itse säätö pienenee äkilliseen muutokseen moottorikentän pyörimistaajuudessa. Mutta roottorin nopeus ei voi muuttua äkillisesti koko sähkökäyttöjärjestelmän inertian vuoksi. Vasta kytkennän jälkeen alkaa vastaava muutos roottorin nopeudessa.
Itsesäätyvä vaikutus minimoi ohjausjärjestelmän monimutkaisuuden. Induktiogeneraattorin säätimet ovat hyvin samanlaisia kuin oikosulkumoottorissa käytetyt säätimet muutamaa poikkeusta lukuun ottamatta. Jos sähkökuorma katoaa, voimanlähteen vääntömomentti kiihdyttää järjestelmän nopeasti mahdollisesti vaarallisiin nopeuksiin. Vaarallisten nopeuksien estämiseksi tarvitaan jarru, säädin tai kaasu. Sähkökytkin on varustettava rajoittamaan virtaa oikosulku. Jos sähköjärjestelmässä tapahtuu oikosulkuvika, generaattori syöttää vikavirtaa. Yleensä virtaa rajoittavat sulakkeet. Voimakoneen vääntömomenttia tulee rajoittaa generaattorin ylikuormituksen estämiseksi. Tämä ohjaus voi liittyä voimanlähteen suunnitteluun tai se voi perustua generaattorin ulostulosta tuleviin takaisinkytkentäsignaaleihin. Äärimmäisessä tapauksessa voimanlähde voi työntää generaattorin vääntömomenttia, mikä aiheuttaa ylinopeuden. Joissakin tapauksissa voimanlähteen nopeus voi pudota alle generaattorin synkronisen nopeuden. Jos näin tapahtuu, generaattoria käytetään käyttämään järjestelmää. Jos tällaista vastetta ei haluta, teho voidaan katkaista tehonvaihtoreleellä tai käyttää ylikuormituskytkintä, jotta moottori voi käydä ilman kuormitusta. Järjestelmä on varustettava nopeudenrajoittimella. . Induktiogeneraattoria voidaan käyttää moottorina kiihdyttämään järjestelmää toimintanopeuteen, tai voimanlähdettä voidaan käyttää kiihdyttämään.
Tämän ohimenevän prosessin näyttämiseksi selkeämmin rakennamme kaksi mekaanista ominaisuutta asynkroninen kone vaihtelevalla määrällä napapareja: yksi ominaisuus, joka vastaa R napaparit ja toinen p" = 1p paria pylväitä (vastaavasti, kuva 14.31, a ja b). Oletetaan, että momentti moottorin akselilla pysyy vakiona kentän nopeuden muuttuessa. Jälkimmäisen kasvun myötä, eli siirtymisen myötä R" to R napaparia, moottori joutuu ensin olosuhteisiin, jotka ovat lähellä käynnistystä, ja tapahtuu virtapiikki.
Jälkimmäisessä tapauksessa käynnistyshetkeä ja virtaa ei tarvitse ottaa huomioon koneen suunnittelussa. Näin suunnittelija saa maksimaalisen suorituskyvyn täydellä kuormalla. Induktiogeneraattoria käytetään yhä useammin keinona ottaa talteen energiaa, joka muuten menisi hukkaan. Tuotettu sähkö voidaan kuluttaa paikan päällä tai myydä kohteen toimittavalle sähköjärjestelmälle. Muuntaakseen tämän energian sähköenergiaa käytetään tuuli- ja vesigeneraattoreita.
Joitakin tyypillisiä induktiogeneraattoreiden sovelluksia. Höyryvian sattuessa generaattoria voidaan käyttää moottorina pumpun käyttämiseen. Lisäksi pumppu estää järjestelmää ylinopeuden, jos sähkökuormitus katoaa. Vesi-yhtiö uskoo voivansa ostaa sähköä halvalla yöllä ja myydä sähköä korkealla hinnalla päiväsaikaan. Hän rakentaa matalia ja korkeita varastosäiliöitä ja asentaa useita pumppuja. Yöllä hän pumppaa vettä matalasta altaasta korkeaan altaaseen ja ostaa sähköä laitokselta. Ruuhka-aikoina vesi virtaa takaisin pumppujen läpi ja käyttää moottoreita generaattoreina. Sähkö myydään kunnallisille. Tämä piiri on niin yksinkertainen, että sitä voidaan ohjata kauko-ohjauksella. Tuuli puhaltaa jatkuvasti Kalifornian aavikon ja vuorten välillä. Yrittäjä mies loi useita torneja tuulimyllyillä, jotka ohjaavat induktiogeneraattoreita vaihteiston kautta. Sähköä tuotetaan suhteessa tuulen nopeuteen ja myydään paikalliselle energiayhtiölle. Induktiomoottorien umpimähkäistä käyttöä generaattoreina tulee välttää. On mahdollista, että tietty moottori ei toimi hyvin generaattorina sisäisen magneettisen kyllästymisen vuoksi. Sisäinen stressi generaattorina voi olla suurempi kuin moottorina, jolla on sama päätejännite. Koneen magneettiset tiheydet määräytyvät vastaavan ilmavälin jännitteen mukaan. Se on ohi korkea jännite ilmaraossa voi johtaa koneen liialliseen kyllästymiseen sekä suuriin ydinhäviöihin ja lisääntyneisiin magnetointivirtoihin. Voidaan olettaa, että kone voi ylikuumentua erittäin pienellä kuormituksella. Jos induktiomoottoria käytetään generaattorina, tämän tiedon on oltava suunnittelijan tiedossa, jotta hän voi tehdä tarvittavat oikaisut magneettisissa tiheyksissä. Induktiomoottorit on tyypillisesti mitoitettu 460 voltiksi käytettäviksi 480 voltin järjestelmässä. Induktiogeneraattoreiden on oltava mitoitettu järjestelmän nimellisjännitteelle tai hieman korkeammalle, ei pienemmälle, koska generaattori on nyt virtalähde eikä voimajärjestelmän kuormitus. Tehokertoimen korjauskondensaattoreita voidaan käyttää generaattorin tehokertoimen korjaamiseen samalla tavalla kuin oikosulkumoottorissa. Jos on kuitenkin mahdollista, että generaattori ylinopeutta, oli se sitten kytkettynä sähköverkkoon tai ei, kondensaattorit on kytkettävä järjestelmään erillisen katkaisijan kautta, jotta generaattorin katkaisija avattaessa kondensaattorit eivät olla kytkettynä generaattoriin. Ylinopeusolosuhteissa kondensaattorit voivat ylikuormittaa generaattoria ja aiheuttaa hallitsemattoman korkean jännitteen. Nämä jännitteet voivat tuhota generaattorin eristysjärjestelmiä ja olla vaarallisia muille laitteille ja henkilökunnalle. Paperitehtaalla on huomattava määrä saatavilla olevaa polttoainetta kuoressa ja romuna. . Induktiogeneraattorit on suunniteltu tiettyihin sovelluksiin, ei yleiseen käyttöön.
Mutta kun muutetaan pois R to R", eli kentän pyörimistaajuuden pienentyessä kone löytää itsensä ensin generaattoritilan olosuhteisiin ja toimii antaen energiaa verkkoon.
Tätä tilaa käytetään toisinaan vetolaitteen nopeaan ja taloudelliseen jarrutukseen.
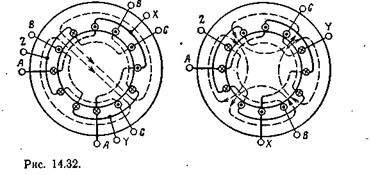
Kaksi erillistä käämiä syötetään staattoriin vain pienitehoisille moottoreille; suuritehoisissa moottoreissa on tarkoituksenmukaisempaa vaihtaa saman käämin keloja eri napaparien määrän saamiseksi. Kuvassa 14.32 näyttää kytkentäpiirin kolmivaiheinen käämitys kahdesta neljään napaan. Käämityksen vaihtaminen muussa suhteessa kuin 1:2 vaatii monimutkaisempaa piirin vaihtoa ja on harvinaisempaa.
Ota yhteyttä paikalliseen jakelijaasi tai myyntiedustajaasi teknisen pyynnön lähettämiseksi. Vain ne, jotka tietävät erot, voivat valita oikean ohjaustavan jo taajuusmuuttajaa suunniteltaessa - ja siten pitää kustannukset mahdollisimman alhaisina.
Sähkökäyttöistä käyttöjärjestelmää suunniteltaessa on tärkeää määrittää sovelluksen ohjauksen tarkkuusvaatimukset. Jos vaatimukset ovat läpinäkyviä ja määriteltyjä, käyttöjärjestelmä voidaan koota ja säätää tarvittavilla komponenteilla. Päätavoitteena on valita oikeat komponentit, joilla on tietyt ohjauksen laatuvaatimukset kustannusoptimaalisella tavalla - vain näin vältetään turhat yleiskustannukset, jos esimerkiksi vaatimukset on luokiteltu liian korkeiksi tai liian alhaiseksi.
Useimmissa tapauksissa asynkronisen koneen staattorissa on kaksi itsenäistä käämiä, joista kumpikin kytketään suhteessa 1:2 tai muuten. Moottorissa on siis neljä kierroslukua, esimerkiksi 3000, > 1500, 1000 ja 500 rpm.
Reostaattinen säätö. Kolmivaiheisissa asynkronisissa moottoreissa, joissa on vaiheroottori, käytetään reostaattista menetelmää roottorin nopeuden säätämiseksi. Tämä saavutetaan viemällä säädettävä kolmivaiheinen reostaatti roottorin vaihekäämien piiriin, kuten moottoria käynnistettäessä (kuva 14.24). Mutta tämä reostaatti on suunniteltava pitkäaikaista roottorin virran aiheuttamaa kuormitusta varten, ei lyhytaikaista kuormitusta varten, kuten käynnistysreostaatti. Roottoripiirin aktiivisen vastuksen kasvu muuttaa ominaisuutta M(s) - tekee siitä pehmeämmän (katso kuva 14.25). Jos moottorin akselin tasaisella vääntömomentilla roottoripiirin aktiivista vastusta lisätään lisäämällä asteittain reostaatin vastusta (r p1< rp2< r р3), то рабочая точка будет смещаться с одной кривой Neiti) seuraavaan, mikä vastaa roottoripiirin lisääntynyttä vastusta (kuva 14.25, pisteet). 1-4), jonka mukaan luisto kasvaa ja sen seurauksena moottorin nopeus laskee.
Tällä tavalla on mahdollista muuttaa roottorin nopeutta alueella nimellispysähdys. Mutta tällä säätömenetelmällä suhteellisen suuret energiahäviöt ovat väistämättömiä (katso § 14.11). Pyörivä kenttäteho R vr, s ottamatta huomioon staattorin sydämen energiahäviöitä, se koostuu (katso kuva 14.20) roottorin käämin johtimien tehohäviöistä (katso vastaava piiri kuvassa 14.19);
R pr2 \u003d r "in2 (I" 2) 2
P fur \u003d r "in 2 (I" 2) 2.
Asenne
R pr 2 / R mech \u003d s / (l -s) \u003d (n 1 - n)/n
osoittaa, että mekaanisen tehon jakaminen pienenee suoraan suhteessa roottorin nopeuden laskuun, samalla kun tehohäviöiden osuus roottoripiirin aktiivivastuksessa kasvaa vastaavasti. Siksi moottorin nopeuden vähentämiseksi esimerkiksi 25%: lla on tarpeen sisällyttää roottoripiiriin reostaatti, jolla on sellainen aktiivinen vastus, jossa neljännes pyörivän magneettikentän energiasta muunnetaan turhaan lämmöksi. Tällaisen säätelyn haittana voi olla myös se, että reostaatin liittäminen roottoripiiriin tekee mekaaninen ominaisuus moottori on pehmeämpi, mikä vähentää sen nopeuden vakautta. Kun reostaatti on päällä, pienet muutokset akselin kuormituksessa aiheuttavat merkittäviä muutoksia moottorin kierrosluvuissa.
Sähköasennuksissa on paikkoja, joissa et tule toimeen ilman tasavirtamoottoria. Juuri tätä sähkömoottoria voidaan säätää sähköasennuksissa vaaditun roottorin pyörimisnopeuden mukaan. Totta, siinä on paljon puutteita, ja yksi niistä on harjojen nopea kuluminen, jos ne asennettiin kaarevasti, ja niiden käyttöikä on melko alhainen. Kuluessaan syntyy kipinöitä, joten tällaista moottoria ei voida käyttää räjähdysalttiissa ja pölyisissä tiloissa. Lisäksi sähkömoottori tasavirta se maksaa kallista. Voit muuttaa tätä tilannetta käyttämällä asynkronista moottoria ja taajuussäädintä asynkroniselle moottorille.
Vaihtovirralla toimivat sähkömoottorit ovat lähes kaikissa suhteissa parempia kuin tasavirralla toimivat analogit. Ensinnäkin ne ovat luotettavampia. Toiseksi niillä on pienemmät mitat ja paino. Kolmanneksi hinta on alhaisempi. Neljänneksi niitä on helpompi käyttää ja yhdistää.
Mutta heillä on yksi haittapuoli - tämä on nopeuden säätelyn monimutkaisuus. Tässä tapauksessa tavalliset asynkronisten moottoreiden taajuuden säätömenetelmät eivät toimi täällä, nimittäin jännitteen muuttaminen, vastuksen asettaminen ja niin edelleen. Asynkronisen sähkömoottorin taajuudensäätö oli ykkösongelma. Vaikka teoreettinen perusta on ollut tiedossa viime vuosisadan 30-luvulta lähtien. Kaikki meni kustannuksiin. TAAJUUSMUUNNIN. Kaikki muuttui, kun keksittiin mikropiirit, joiden avulla transistorien kautta tuli mahdolliseksi koota taajuusmuuttaja pienin kustannuksin.
Sääntelyperiaate
Joten tapa ohjata oikosulkumoottorin nopeutta perustuu yhteen kaavaan. Tässä hän on alla.
ω=2πf/p, missä
- ω on staattorin pyörimiskulmanopeus;
- f on tulojännitteen taajuus;
- p on napaparien lukumäärä.
Eli käy ilmi, että on mahdollista muuttaa sähkömoottorin pyörimisnopeutta vain muuttamalla jännitetaajuutta. Mitä se käytännössä antaa? Ensimmäinen on moottorin sujuva toiminta, erityisesti laitetta käynnistettäessä, kun itse moottori toimii suurimmalla kuormituksella. Toinen on lisääntynyt luisto. Tästä johtuen hyötysuhde kasvaa ja tehoominaisuuksien menetys vähenee.
Taajuusohjaimen rakenne
Kaikki nykyaikaiset taajuusmuuttajat on rakennettu niin sanotun kaksoismuunnoksen periaatteelle. Tuo on, vaihtovirta muunnetaan tasavirraksi hallitsemattoman tasasuuntaajan ja suodattimen kautta. Lisäksi pulssiinvertterin (se on kolmivaiheinen) kautta tapahtuu tasavirran käänteinen muuntaminen vaihtovirraksi. Itse invertteri koostuu kuudesta virtakytkimestä (transistorista). Joten jokainen sähkömoottorin käämi on kytketty tiettyihin tasasuuntaajan avaimiin (positiivinen tai negatiivinen). Se on invertteri, joka muuttaa staattorin käämeihin syötettävän jännitteen taajuutta. Itse asiassa sähkömoottorin taajuuden säätö tapahtuu sen kautta.

Tässä laitteessa tehotransistorit on asennettu lähtöön. Ne toimivat avaimina. Jos vertaamme niitä tyristoreihin, on huomattava, että entiset tuottavat signaalin sinusoidin muodossa. Juuri tämä muoto luo minimaalisen vääristymän.
Nyt taajuusmuuttajan toimintaperiaate. Tämän ymmärtämiseksi ehdotamme alla olevan kuvan purkamista.
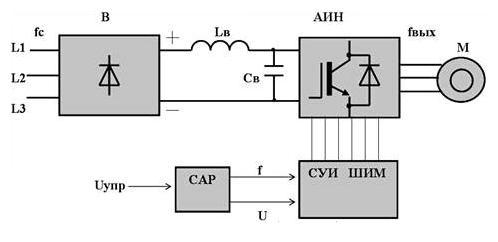
Käydään siis kuvan läpi, missä
- "B" on ohjaamaton diodityyppinen tehotasasuuntaaja.
- "AIN" on autonominen invertteri.
- "SUI PWM" - pulssinleveyden ohjausjärjestelmä.
- "SAR" - automaattinen ohjausjärjestelmä.
- "Sv" - suodatinkondensaattori.
- "Lv" - kaasu.
Kaavio osoittaa hyvin selvästi, että invertteri säätelee jännitetaajuutta pulssinleveyden ohjausjärjestelmän ansiosta (se on korkeataajuinen). Tämä säätimen osa on vastuussa sähkömoottorin staattorikäämien kytkemisestä vuorotellen tasasuuntaajan positiiviseen napaan, sitten negatiiviseen. Napoihin kytkeytymisen taajuus tapahtuu sinimuotoista käyrää pitkin. Tässä tapauksessa pulssitaajuus määräytyy tarkasti PWM-taajuuden mukaan. Näin taajuuden säätö toimii.





