I systemer med denne reguleringsmetoden, på grunn av tilstedeværelsen av hysterese og det begrensede styresignalet, vil den faktiske verdien av parameteren alltid periodisk svinge i forhold til den innstilte verdien, det vil si at det alltid vil være et misforhold. Det er mulig å øke reguleringsnøyaktigheten litt ved å redusere koblingshysteresen, men dette fører til en økning i koblingsfrekvensen til utgangsreléet og en reduksjon i den. Livssyklus. Kontrollere av denne typen er derfor uegnet for oppgaver hvor kontrollparameteren er svært dynamisk og hvor det kreves nøyaktig vedlikehold av verdien til den kontrollerte parameteren. Mulig bruk av grenseregulatorer - objekter med høy treghet og lave krav til reguleringsnøyaktighet.
PID-kontroll
Du kan forbedre nøyaktigheten av reguleringen betydelig ved å bruke PID-loven (Proportional-Integral-Differential Regulation Law).
For å implementere PID-loven brukes tre hovedvariabler:
P – proporsjonalt bånd, %;
I – integreringstid, s;
D er differensieringstiden, s.
Manuell innstilling av PID-kontrolleren (bestemme verdiene til parameterne P, I, D), som gir den nødvendige kvaliteten på reguleringen, er ganske komplisert og brukes sjelden i praksis. UT/UP-seriens PID-kontrollere gir automatisk innstilling av PID-parametere for en spesifikk kontrollprosess, samtidig som muligheten for manuell justering opprettholdes.
Proporsjonal
I proporsjonalbåndet, bestemt av koeffisienten P, vil styresignalet endres proporsjonalt med forskjellen mellom settpunktet og den faktiske verdien av parameteren (mismatch):
styresignal = 100/P E,
hvor E er misforholdet.
Proporsjonalitetskoeffisienten (forsterkning) K er omvendt proporsjonal med P:
Det proporsjonale båndet bestemmes i forhold til innstilt styresettpunkt, og innenfor dette båndet endres styresignalet fra 0 til 100 %, dvs. hvis den faktiske verdien og settpunktet er like, vil utgangssignalet ha en verdi på 50 %.
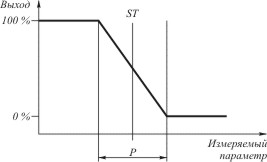
hvor P er proporsjonalbåndet;
ST - reguleringssettpunkt.
For eksempel:
måleområde 0…1000 °С;
kontroll settpunkt ST = 500 °С;
proporsjonalt bånd P = 5 %, som er 50 °C (5 % av 1000 °C);
ved en temperaturverdi på 475 °C og lavere vil styresignalet ha en verdi på 100 %; ved 525 °C og over - 0%. I området 475…525 °C (i proporsjonalbåndet), vil kontrollsignalet endres proporsjonalt med mistilpasningsverdien med en forsterkning på K = 100/P = 20.
Redusering av verdien av proporsjonalbåndet P øker kontrollerens respons på mistilpasning, dvs. en liten mistilpasning vil tilsvare en større verdi av styresignalet. Men samtidig, på grunn av den store forsterkningen, får prosessen en oscillerende karakter rundt settpunktverdien, og nøyaktig regulering kan ikke oppnås. Med en for stor økning i proporsjonalbåndet vil kontrolleren reagere for sakte på den resulterende mismatchen og vil ikke være i stand til å holde styr på prosessdynamikken. For å kompensere for disse ulempene med proporsjonal kontroll, introduseres en ekstra tidskarakteristikk - den integrerte komponenten.
integrert komponent
Den bestemmes av integrasjonstidskonstanten I, er en funksjon av tiden og gir en endring i forsterkningen (forskyvningen av proporsjonalbåndet) over en gitt tidsperiode.
styresignal = 100/P E + 1/I ∫ E dt.
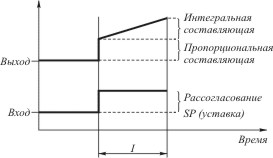
Som det fremgår av figuren, hvis den proporsjonale komponenten av kontrollloven ikke gir en reduksjon i misforholdet, begynner integralkomponenten å gradvis øke forsterkningen over tidsperioden I. Etter en periode I, gjentas denne prosessen. Hvis misforholdet er lite (eller raskt avtar), øker ikke forsterkningen, og hvis verdien av parameteren er lik den angitte innstillingen, tar den en minimumsverdi. I denne forbindelse omtales den integrerte komponenten som funksjonen for automatisk kontrollavstengning. Ved PID-kontroll vil trinnresponsen til prosessen være svingninger som gradvis avtar mot settpunktet.
Avledet begrep
Mange kontrollobjekter er tilstrekkelig treghet, dvs. de har en forsinkelse som respons på den påførte handlingen (dødtid) og fortsetter å reagere etter at kontrollhandlingen er fjernet (forsinkelsestid). PID-regulatorer på slike objekter vil alltid være sent ute med å slå på/av styresignalet. For å eliminere denne effekten introduseres en differensialkomponent, som bestemmes av differensieringstidskonstanten D, og full implementering av PID-kontrollloven er gitt. Differensialkomponenten er den tidsderiverte av mistilpasningen, dvs. den er en funksjon av endringshastigheten til kontrollparameteren. I tilfelle misforholdet blir konstant verdi, slutter differensialkomponenten å påvirke styresignalet.
styresignal = 100/P E + 1/I ∫ E dt + D d/dt E.
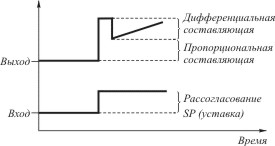
Med introduksjonen av differensialkomponenten begynner kontrolleren å ta hensyn til dødtid og forsinkelsestid, og endrer styresignalet på forhånd. Dette gjør det mulig å redusere svingninger i prosessen rundt settpunktverdien betydelig og oppnå en raskere gjennomføring av transienten.
Når det genereres et styresignal, tar PID-kontrollere således hensyn til egenskapene til selve kontrollobjektet, dvs. analyser misforholdet for størrelsen, varigheten og endringshastigheten. Med andre ord, PID-regulatoren "forutser" reaksjonen til det regulerte objektet på styresignalet og begynner å endre kontrollhandlingen ikke når settpunktverdien er nådd, men på forhånd.
Når du lager ulike automatiseringsenheter, er oppgaven ofte å gi en gitt rotasjonshastighet på motorakselen, uavhengig av gjeldende belastning.
Det er ikke vanskelig å se at rotasjonshastigheten til motorakselen ikke bare avhenger av spenningen på motoren, men også av ytre ukjente påvirkninger på motoren, som variabel friksjonskraft, skiftende belastning, temperatur, smørekvalitet og andre faktorer. Derfor er oppgaven med å gi en gitt rotasjonshastighet for motorakselen redusert til oppgaven med å generere en slik spenning på motoren som ville gi en gitt rotasjonshastighet for motoren, uavhengig av påvirkningen av eksterne tilfeldige faktorer.
Løser dette problemet uten teori automatisk kontroll umulig. Løsningen av problemet består i beregning og implementering PID hastighetsregulator. Dean-Soft-spesialister har erfaring med å løse slike problemer.
PID-regulatoren gir en gitt hastighet på aktuatoren (motoren), uavhengig av den konstante eller sakte skiftende lasten som virker på den.
PID-regulatoren er en proporsjonal-integral-differensialregulator. PID-regulatoren består henholdsvis av proporsjonal ( K p ), integral ( K og / s ) og differensial ( K d s ) kobling, hver av dem har sin egen gevinst (fig. 1).
Ris. 1. Strukturskjema av et kontrollsystem med en PID-regulator.
Her: s er Laplace-operatøren (noen ganger referert til som s ). Hvis vi abstraherer fra Laplace-transformasjonene, så blir postene K p, K og / s og K d s bør kun tas som en betegnelse på den tilsvarende lenken, og ikke som et matematisk uttrykk. Og du bør definitivt ikke lete etter mening s , fordi, som allerede sagt, det er en operator, ikke en variabel.
I et PID-system er den faktiske hastigheten V(t) motor måles ved hjelp av sensor.
Ved systeminngang hastighetssettpunktet kommer V ass(t) i samme enheter som den faktiske hastigheten.
Tilbakemelding Adder trekker fra hastighetsreferansesignalet V ass (t) faktisk hastighetssignal V(t) og genererer et feilsignal e (t) ved utgangen:
Feilsignalet sendes til proporsjonal, integrert og differensial koblingene til PID-kontrolleren.
proporsjonal kobling multipliserer feilsignalet e med en faktor K p og genererer et utgangssignal y s.
integrert lenke integrerer signalet e (t) over tid, multipliserer med en faktor K og og genererer et utgangssignal y og.
differensiell kobling differensierer feilsignalet med hensyn til tid e (t), multipliserer resultatet med tallet K d og utgangssignalforming y d.
PID-kontroller akkumulator summerer signalene y s(t), y og(t) og y d(t) og genererer et utgangssignal y(t):
PWM og strømbryter designet for å overføre det beregnede utgangssignalet til motoren y(t).
Beregning av koeffisientene til PID-regulatoren
Det er ikke vanskelig å se at PID-regulatoren er preget av tre koeffisienter K p, K og og K d. For å beregne disse koeffisientene er det nødvendig å kjenne parametrene til kontrollobjektet, i dette tilfellet motoren.
Struktur og parametere til kontrollobjektet
Fra synspunktet til teorien om automatisk kontroll, motoren likestrøm tilnærmet beskrevet av: to aperiodiske lenker med elektrisk tidskonstant T e og mekanisk tidskonstant T m. Samlet motorgevinst K motor(Fig. 2). Faktisk, strukturordning motoren er mye mer komplisert, men dette er ikke så viktig for oss i dette tilfellet.

Ris. 2. Strukturelt diagram av motoren fra synspunktet til teorien om automatisk kontroll.
Motoroverføringsfunksjon, skrevet i form av Laplace-operatøren s, følgende:
MotorforsterkningK motor bestemmer proporsjonaliteten mellom rotasjonshastigheten til motorakselen ved tomgang og spenningen påført inngangen. Enkelt sagt er forholdet lik forholdet mellom tomgangshastighet V xx og motorens merkespenning U n.
Spenningen på motoren i mikroprosessorteknologi er satt i konvensjonelle spenningsenheter, og hastigheten er tatt i konvensjonelle hastighetsenheter.
Hvis en 7-bits PWM brukes til å generere spenningen på motoren (se nedenfor), så for å beregne K motor verdien av merkespenningen er 128 konvensjonelle spenningsenheter.
tomgang w xx, spesifisert i passdataene til motoren, bør leses på nytt i konvensjonelle hastighetsenheter Vxx bestemmes av måten hastighetssensoren er implementert på.
Anta for eksempel at en inkrementell koder brukes til å måle hastighet, plassert på motorakselen og har 512 merker per omdreining. La hastigheten i konvensjonelle enheter måles som antall merker per beregningssyklus D t. La beregningssyklusen, oppnådd ved å evaluere ytelsen til algoritmen, være lik 0,001 sek. La motoren gå på tomgang w xx=5000 rpm.
La oss oversette motorhastigheten til sensormerker, vi får: 5000x512 = 2560000 merker / min. La oss konvertere minutter til beregningssykluser:
Hvis motorparametrene er ukjente, bestemmes tomgangshastigheten eksperimentelt. For å gjøre dette, ved tomgang, påføres maksimal spenning til motoren og avlesninger tas fra hastighetssensoren V xx.
Mekanisk tidskonstant T m avhenger av treghetsmomentet til motorakselen, girkassen, tregheten utøvende enhet. Det er vanligvis ikke mulig å beregne verdien analytisk. Derfor måles det eksperimentelt.
For å gjøre dette påføres den maksimale spenningen brått på motoren ved nominell belastning, og den forbigående prosessen med hastighetsendring fjernes V(t).
Hastigheten tas fra hastighetssensoren på diskrete tidspunkter, registreres i RAM-en til mikroprosessoren og overføres deretter til en personlig datamaskin. Personlig datamaskin rekonstruerer hastighetsendringsgrafen V(t)(Fig. 3).
 |
Ris. 3. Transient prosess i en likestrømsmotor.
I henhold til transientgrafen er det mulig å bestemme for det første tomgangshastigheten V xx, og for det andre reguleringstiden t s. Kontrolltiden bestemmes av slutttiden for den transiente prosessen (tiden da transientkurven avviker med mindre enn 1 % fra steady state-verdien).
Hvis vi neglisjerer den lille påvirkningen av den elektriske tidskonstanten T e, vanligvis en størrelsesorden mindre enn den mekaniske tidskonstanten T m, så kan den forbigående prosessen i en likestrømsmotor betraktes som aperiodisk med en konstant T m.
Det er kjent at tiden for en aperiodisk forbigående prosess er fem ganger lengre enn dens tidskonstant. De.:
Derfor får vi for vårt tilfelle:
I vårt tilfelle kontrolltiden t s, etter grafen å dømme, er lik 1,5 sek. Deretter den mekaniske tidskonstanten T m= 1,5/5 = 0,3 sek.
Etter å ha plottet den forbigående prosessgrafen, finner vi den mekaniske tidskonstanten T m.
Elektrisk tidskonstantT e bestemmer tregheten til motorarmaturmagnetiseringen og er lik forholdet mellom motorarmaturinduktansen og motstanden til viklingen:
I praksis er ankerinduktansparametere vanskelige å måle, og da tar de den elektriske tidskonstanten en størrelsesorden mindre enn den mekaniske tidskonstanten:
Dette gjelder for de fleste motorer.
Beregning av koeffisientene til PID-regulatoren.
For å beregne koeffisientene til PID-kontrolleren bør man løse det inverse problemet med dynamikk. For å gjøre dette abstraherer vi fra PID-kontrolleren. Vi vil anta at kontrollerstrukturen, dvs. dens overføringsfunksjon W p(s), er ukjent for oss. For dette er overføringsfunksjonen til kontrollobjektet kjent Wdv(s)(Fig. 4).

Ris. 4. Innledende skjema for beregning av kontrolleren for en DC-motor.
Vi skriver overføringsfunksjonen til det lukkede systemet W s (s):
La oss finne ut hvilken forbigående prosess i systemet som vil passe oss? Vi er ganske fornøyd med den aperiodiske forbigående prosessen i systemet. Slik skal systemet reagere på endringer i hastighet og belastning.
La ønsket tidskonstant for transienten T vil være omtrent lik T m. De. overføringsfunksjonen til ønsket system w(s) er lik:
La oss likestille overføringsfunksjonen til det lukkede systemet med overføringsfunksjonen til det ønskede systemet:
Ved enkle matematiske transformasjoner uttrykker vi herfra uttrykket for overføringsfunksjonen til kontrolleren W p(s):
Erstatt verdien W motor(s):
La oss introdusere koeffisienter:
Vi får:
Det er ikke vanskelig å se at vi nettopp fikk koeffisienten C 1, koeffisient før den integrerte lenken FRA 2 og koeffisienten foran differensieringsleddet C 3 . De. vi fikk den klassiske PID-kontrollerstrukturen med parametere K p=FRA 1 , K og=C 2 og K d=C 3 :
Implementering av en PID-kontroller på en digital mikroprosessor
Systemer med PID-kontrollere implementeres foreløpig kun digitalt, og beregningen av kontrolllover utføres av billige mikroprosessorer av AVR- eller MCS -51-serien. Merk at mikroprosessorer er heltall og støtter ikke flyttalloperasjoner. Dette krever at programmereren tilpasser algoritmene deretter.
I et PID-system måles motorens hastighet ved hjelp av en sensor. Virkelig hastighet måles i heltallsbetingede hastighetsenheter. Vanligvis velges konvensjonelle hastighetsenheter på en slik måte at hastigheten i c.u. endret i området fra -127 til 127 (én byte), i ekstreme tilfeller fra -15 til 15 (hastigheten tas med margin). Men i alle fall bør antall hastighetsøkninger ikke være mindre enn det nødvendige antallet hastigheter.
Hastighet kan måles med følgende sensorer:
Den angitte hastigheten legges inn i systemet i de samme konvensjonelle enhetene som den reelle hastigheten. Den innstilte hastigheten overføres vanligvis fra en kontrollprosessor på høyere nivå eller en personlig datamaskin, og lagres i de riktige minnecellene til mikroprosessoren.
Tilbakemelding Adder trekker fra innstilt hastighet V ass ekte hastighet V og mottar det såkalte feilsignalet e:
Med tanke på at hastigheten V ass og V er heltall i området -127 til 127, implementeres denne operasjonen ganske enkelt på en heltallsmikroprosessor. Det bør sikres at resultatet. Hvis e<-127 , то e =127, а если e >12 7, så e = 127.
Feilsignal e legger inn inngangen til PID-regulatoren, dvs. på en proporsjonal lenke, integral og differensial.
proporsjonal kobling genererer et utgangssignal y s ved å multiplisere det øyeblikkelige feilsignalet med en faktor K p.
Koeffisient K p representerer vanligvis en ikke-heltallsverdi mellom 0,5 og 2. Derfor, for å multiplisere et heltall en-byte tall e for denne koeffisienten bruk tabellen K P,Jeg, som er beregnet på forhånd:
til Jeg =-127...127Tallene i tabellen tar dessuten hensyn til begrensningen på resultatet, som også skal vise seg å være en byte, og ikke overstige verdien 127. Det vil si hvis multiplikasjonsresultatet er mer enn 127, så ta det lik 127, og hvis den er mindre enn -127, ta den lik -127 .
Programmerere bør forstå at prosessoren vurderer et signert nummer Jeg som en usignert tabellindeks, så tabellelementer med indekser fra -128 til -1 vil faktisk være i indeksområdet fra 128 til 255.
Deretter multipliseres med koeffisienten K p erstattet av tabellelementvalg K P,Jeg med indeks e:
Tabellen beregnes vanligvis på en personlig datamaskin og flashes inn i mikroprosessorens minne.
integrert lenke genererer et utgangssignal y og ved å integrere feilsignalet e med tid og multiplikasjon med en koeffisient K og.
Her: T- tid fra arbeidsstart.
Den digitale mikroprosessoren beregner integralet ved trinnvis integrasjon med et trinn lik klokkesyklusen til timeren D t. For det diskrete tilfellet erstattes formelen med:
Her er k antall beregningssykluser som har gått siden arbeidet startet.
Tenk på summen av alt ek. I utgangspunktet er det bare summen av alle verdiene e , mottatt ved hver syklus. Denne summen kalles integralsummen. S (ikke å forveksle med s - Laplace-operatøren). Integralsummen implementeres som en global variabel og økes ved hver syklus med gjeldende verdi av feilsignalet e:
Ved beregning av PID-regulatoren, koeffisienten K og vanligvis mellom 0,05 og 2. Beregningssyklus D t varierer fra 0,0001 til 0,002 sek. Altså koeffisienten K og D t er fra 5·10 -6 til 4·10 - 3 . Fordi denne koeffisienten er mye mindre enn 1, så oppstår problemet med heltallsmultiplikasjon med den, siden etter multiplikasjon vil alltid være null.
For å løse dette problemet, la oss prøve å multiplisere koeffisienten K og D t for et stort antall EN , og del integralsummen med samme tall:

Angi produktet K og D t · EN gjennom koeffisienten B :
La oss velge et tall EN , et multiplum av 256 x til forholdet B var i området fra 0,05 til 5.
For å beregne forholdet S/A , utvide tegnet til tallet S :
implementere 16-bits beregning S, hvis EN =256;
implementere 24-bits beregning S, hvis EN =256 2 ;
implementere 32-biters beregning S, hvis EN =256 3 .
Det er ikke vanskelig å implementere å legge til et 16, 24 eller 32-bits signert nummer S signert 8-bits nummer e. Ikke glem at hvis e Hvis den er positiv, vil fortegnsforlengelse fylle høyordensbitene med nuller, og hvis den er negativ, vil høyordensbitene fylles med enere. For å begrense akkumuleringen av integralsummen implementerer vi en øvre og nedre grense. Dette gjøres vanligvis som følger: hvis den mest signifikante (tegn) biten ikke er lik den nest siste biten, bør veksten av integralsummen suspenderes.
Husk at delingen av et hvilket som helst tall med tallet 256 x tilsvarer en høyreforskyvning med x bytes til høyre. La oss bruke denne regelen. Ta bare den høye byten av integralsummen S : i tilfelle av en 16-bit teller, tilsvarer dette en forskyvning med én byte, i tilfelle av en 24-bit telling - med to byte, i tilfelle av en 32-bit telling - med tre byte.
På denne måten:
Hvor: S eldre- høy byte av nummeret S .
Multiplikasjon med en faktor B implementere i form av en tabell B Jeg, i likhet med beregningen av koeffisienten til den proporsjonale koblingen:
differensiell kobling
Derivativ krets beregner utgangssignalet y d - e 0 implementerer vi i form av en tabell C Jeg, som i beregningen av den proporsjonale koblingen:
PID-kontroller akkumulator
Adderen etter PID-kontrolleren legger til de øyeblikkelige verdiene til signalene y s, y og og y d og genererer et utgangssignal y:
Når du summerer, bør du sørge for at resultatet er i området fra -127 til +127, ved å implementere for eksempel en 16-bits summering. Hvis resultatet er større enn 127, bør det tas lik 127, og hvis mindre enn -127, så lik -127.
PWM-signalet genereres automatisk av AVR-mikroprosessorene. Én mikroprosessor er i stand til å generere opptil 3 maskinvare PWM-signaler. I tillegg kan PWM-signalet genereres programmatisk av timer.
Det er praktisk å lage en 7-bit PWM. I dette tilfellet kan kontrollstrømbryteren kobles til i henhold til diagrammet vist i fig. fire.
Ris. 4. Måten å koble strømbryteren til PWM-utgangen.
Høy (tegn) bit av resultatet y utgang gjennom en hvilken som helst I/O-pinne til en av inngangene til strømbryteren, og de resterende 7 bitene (den siste biten er satt til null) uten noen konvertering kan lastes inn i PWM cutoff-formasjonsregisteret.
La oss bevise det.
Q.E.D.
Du kan forbedre nøyaktigheten av reguleringen betydelig ved å bruke PID-loven (Proportional-Integral-Differential Regulation Law).
For å implementere PID-loven brukes tre hovedvariabler:
P – proporsjonalt bånd, %;
I – integreringstid, s;
D er differensieringstiden, s.
Manuell innstilling av PID-kontrolleren (bestemme verdiene til parameterne P, I, D), som gir den nødvendige kvaliteten på reguleringen, er ganske komplisert og brukes sjelden i praksis. UT/UP-seriens PID-kontrollere gir automatisk innstilling av PID-parametere for en spesifikk kontrollprosess, samtidig som muligheten for manuell justering opprettholdes.
Proporsjonal
I proporsjonalbåndet, bestemt av koeffisienten P, vil styresignalet endres proporsjonalt med forskjellen mellom settpunktet og den faktiske verdien av parameteren (mismatch):
styresignal = 100/P E,
hvor E er misforholdet.
Proporsjonalitetskoeffisienten (forsterkning) K er omvendt proporsjonal med P:
Det proporsjonale båndet bestemmes i forhold til innstilt styresettpunkt, og innenfor dette båndet endres styresignalet fra 0 til 100 %, dvs. hvis den faktiske verdien og settpunktet er like, vil utgangssignalet ha en verdi på 50 %.
hvor P er proporsjonalbåndet;
ST - reguleringssettpunkt.
For eksempel:
måleområde 0…1000 °С;
kontroll settpunkt ST = 500 °С;
proporsjonalt bånd P = 5 %, som er 50 °C (5 % av 1000 °C);
ved en temperaturverdi på 475 °C og lavere vil styresignalet ha en verdi på 100 %; ved 525 °C og over - 0%. I området 475…525 °C (i proporsjonalbåndet), vil kontrollsignalet endres proporsjonalt med mistilpasningsverdien med en forsterkning på K = 100/P = 20.
Redusering av verdien av proporsjonalbåndet P øker kontrollerens respons på mistilpasning, dvs. en liten mistilpasning vil tilsvare en større verdi av styresignalet. Men samtidig får prosessen på grunn av den store gevinsten en oscillerende karakter rundt settpunktverdien, og presis styring kan ikke oppnås. Med en for stor økning i proporsjonalbåndet vil kontrolleren reagere for sakte på den resulterende mismatchen og vil ikke være i stand til å holde styr på prosessdynamikken. For å kompensere for disse ulempene med proporsjonal kontroll, introduseres en ekstra tidskarakteristikk - den integrerte komponenten.
integrert komponent
Den bestemmes av integrasjonstidskonstanten I, er en funksjon av tiden og gir en endring i forsterkningen (forskyvningen av proporsjonalbåndet) over en gitt tidsperiode.
styresignal = 100/P E + 1/I ∫ E dt.
Som det fremgår av figuren, hvis den proporsjonale komponenten av kontrollloven ikke gir en reduksjon i misforholdet, begynner integralkomponenten å gradvis øke forsterkningen over tidsperioden I. Etter en periode I, gjentas denne prosessen. Hvis misforholdet er lite (eller raskt avtar), øker ikke forsterkningen, og hvis verdien av parameteren er lik den angitte innstillingen, tar den en minimumsverdi. I denne forbindelse omtales den integrerte komponenten som funksjonen for automatisk kontrollavstengning. Ved PID-kontroll vil trinnresponsen til prosessen være svingninger som gradvis avtar mot settpunktet.
Avledet begrep
Mange kontrollobjekter er ganske treghet, det vil si at de har en forsinkelse som respons på den påførte handlingen (dødtid) og fortsetter å reagere etter at kontrollhandlingen er fjernet (forsinkelsestid). PID-regulatorer på slike objekter vil alltid være sent ute med å slå på/av styresignalet. For å eliminere denne effekten introduseres en differensialkomponent, som bestemmes av differensieringstidskonstanten D, og full implementering av PID-kontrollloven er gitt. Differensialkomponenten er den tidsderiverte av mistilpasningen, dvs. den er en funksjon av endringshastigheten til kontrollparameteren. I tilfellet når mistilpasningen blir en konstant verdi, slutter differensialkomponenten å påvirke styresignalet.
styresignal = 100/P E + 1/I ∫ E dt + D d/dt E.
Med introduksjonen av differensialkomponenten begynner kontrolleren å ta hensyn til dødtid og forsinkelsestid, og endrer styresignalet på forhånd. Dette gjør det mulig å redusere svingninger i prosessen rundt settpunktverdien betydelig og oppnå en raskere gjennomføring av transienten.
Når det genereres et styresignal, tar PID-kontrollere således hensyn til egenskapene til selve kontrollobjektet, dvs. analyser misforholdet for størrelsen, varigheten og endringshastigheten. Med andre ord, PID-regulatoren "forutser" reaksjonen til det regulerte objektet på styresignalet og begynner å endre kontrollhandlingen ikke når settpunktverdien er nådd, men på forhånd.
5. Overføringsfunksjonen til hvilken kobling er representert: K (p) \u003d K / Tr
Vi anbefaler deg å lese
, diagnose, behandling Behandling av urogenital klamydia") Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia
Chlamydia urogenital - beskrivelse, årsaker, symptomer (tegn), diagnose, behandling Behandling av urogenital klamydia Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin som
Fordelene og betydningen av hydroaminosyre treonin for menneskekroppen L treonin som Å vente eller ikke vente på en fyr fra hæren. Hvorfor kan de få oppdrag fra hæren
Å vente eller ikke vente på en fyr fra hæren. Hvorfor kan de få oppdrag fra hæren Bakte epler med cottage cheese Bakte epler med cottage cheese
Bakte epler med cottage cheese Bakte epler med cottage cheese

