Motore corrente continua(DPT)
Dispositivo:
1. Statore (induttore).
2. Rotore (ancora).
Lo statore comprende: un alloggiamento, un circuito magnetico a forma di poli, su cui si trova l'avvolgimento di eccitazione.
induttore nominare la parte della macchina progettata per creare un campo magnetico.
Il rotore comprende: un albero, un circuito magnetico, nelle cui scanalature si trova l'avvolgimento e un collettore con spazzole.
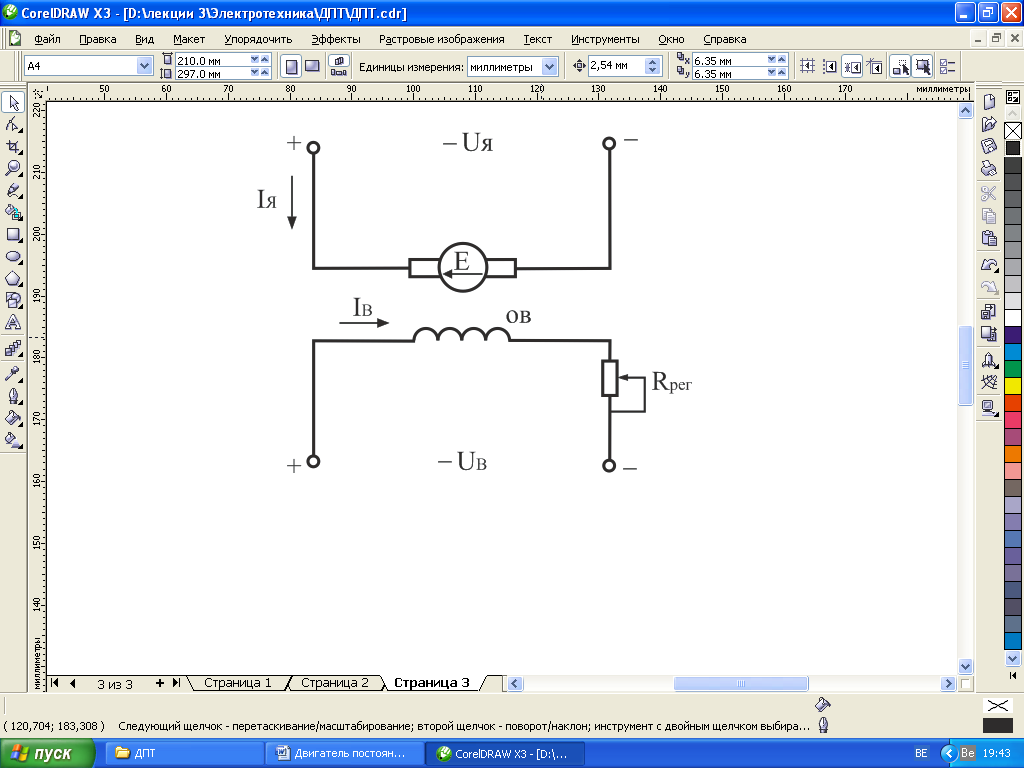
Simbolo:

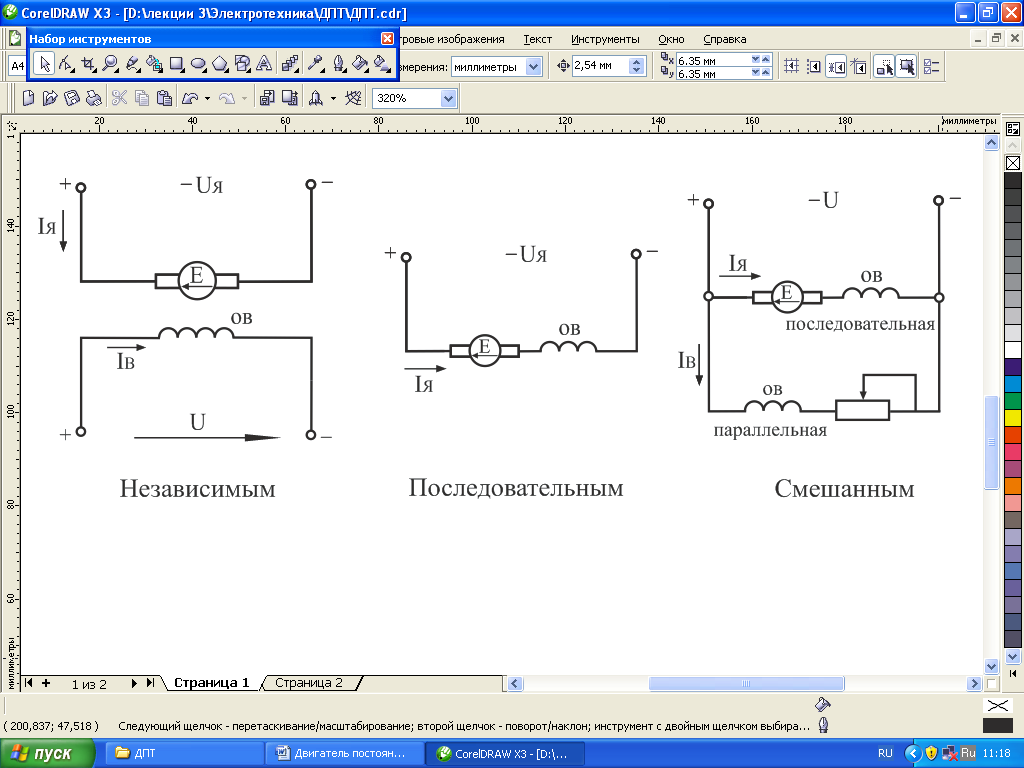
Schemi DPT con vari tipi eccitazione:
Principio di funzionamento:
U V → I V → F;
dove I V - corrente di eccitazione; I I - corrente di armatura.
Si crea l'interazione della corrente di armatura con il flusso magnetico Ф dello statore coppia:
dove C M è il fattore di progettazione.
Sotto l'azione di M, il rotore inizia a ruotare, mentre attraversa le linee di forza campo magnetico, a seguito del quale in esso viene indotto un EMF, che è chiamato EMF di rotazione:
Equazioni DPT di base:
Sono le equazioni di equilibrio elettrico del rotore:
dove è la caduta di tensione nel circuito dell'indotto; è l'EMF di rotazione.
Da questa formula otteniamo una relazione praticamente importante:
Sostituisci invece di
E otteniamo:
![]() .
.
Secondo questa espressione, è possibile costruire una caratteristica meccanica del DPT n \u003d f (M), dato il carico, ad es. M, puoi trovare la velocità di rotazione corrispondente. Se allo stesso tempo U = U nom, Ф = Ф nom abbiamo una caratteristica meccanica naturale.
Caratteristiche meccaniche del DPT:
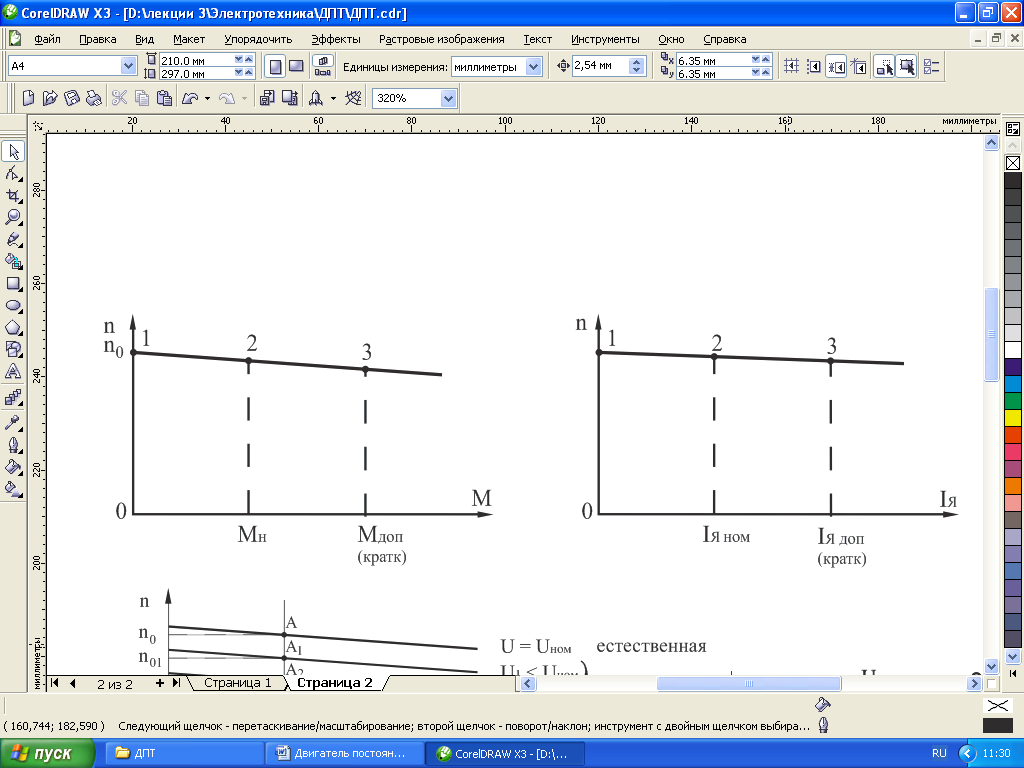
Punto "1" - al minimo; coordinate Ü = 0, n = n 0 ;
"2" - modalità nominale; coordinate M n, n n;
"3" - carico massimo consentito a breve termine.
Grafico 1–2 - lavoro consentito a lungo termine.
Sezione 2–3 - È consentito solo il lavoro a breve termine.
Di solito aggiungo \u003d (2 ÷ 2,5) io nom.
Controllo velocità DPT:
![]() ,
,
dove è la resistenza della catena dell'ancora.
Da dove viene possibilità di controllo della velocità in tre modi: , , .
1. Considerare le caratteristiche meccaniche artificiali nel controllo della velocità, modificando l'input.
Ovviamente, a seconda delle condizioni di funzionamento del motore, è possibile cambiare solo nel senso di diminuzione, e, quindi, il regime del motore può essere regolato solo verso il basso, mentre il regime del minimo (punto "1") diminuisce.
Le caratteristiche assumeranno la forma:
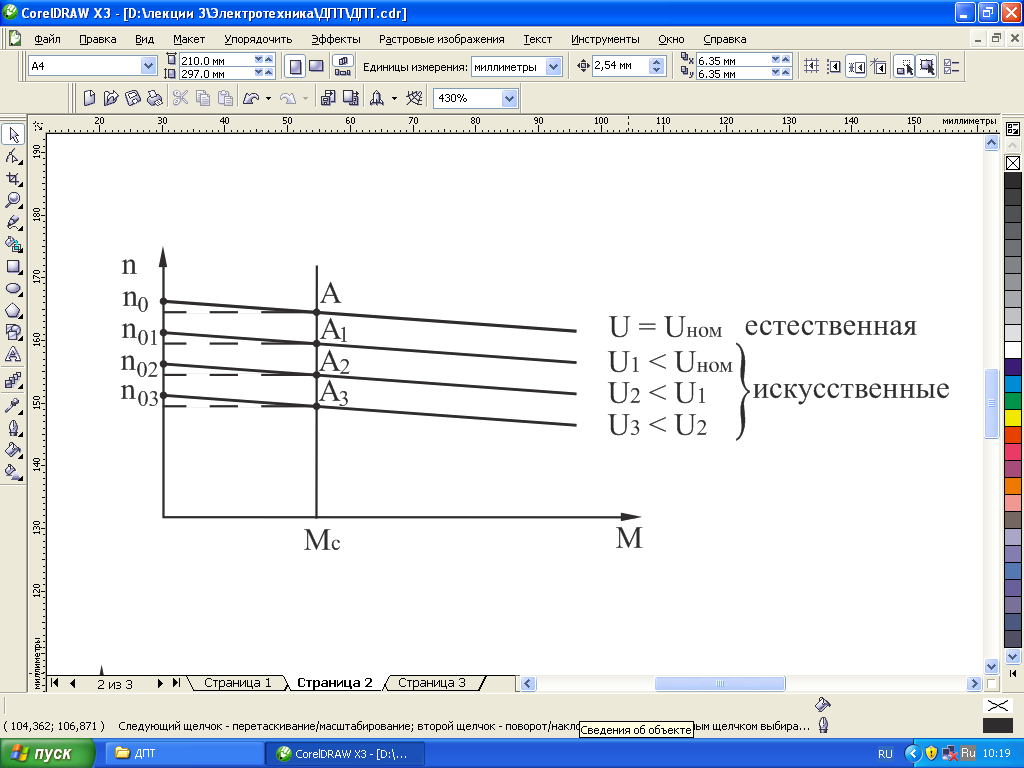
Se il carico sul motore è rappresentato dalla caratteristica M C, allora variando la tensione da a si possono ottenere velocità diverse da n A a n A3.
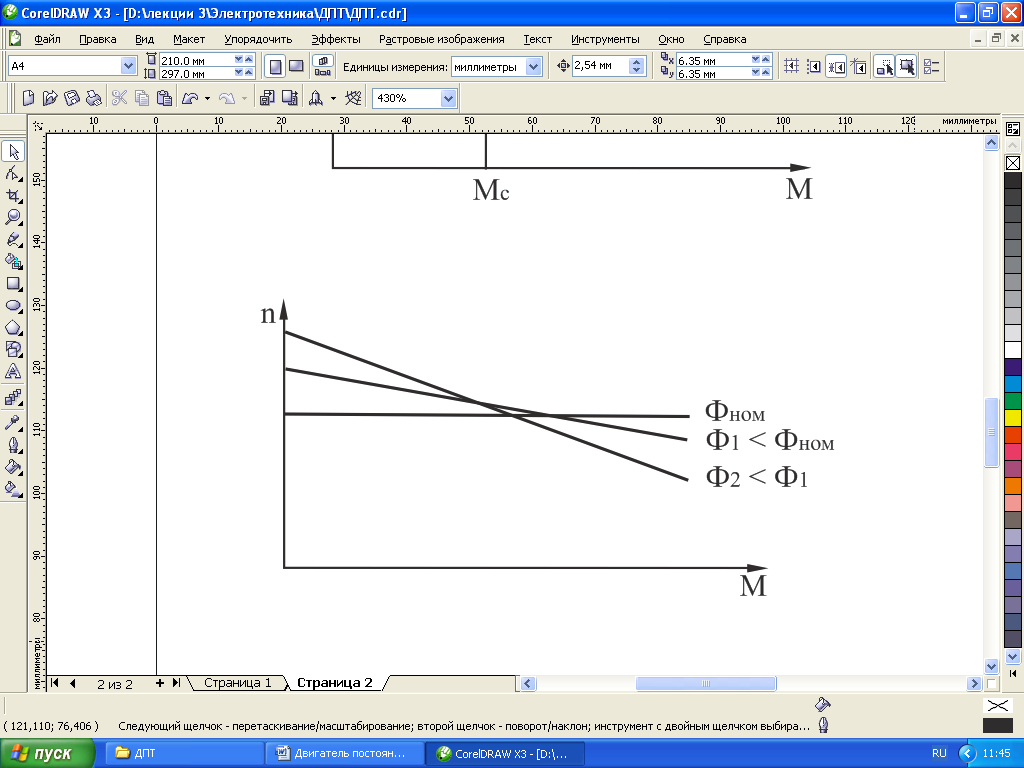
2. Controllo della velocità di variazioni nell'ampiezza del flusso magnetico.
L'entità del flusso magnetico può essere modificata utilizzando la corrente I V, ad esempio un reostato, solo nella direzione di diminuzione. Una diminuzione del flusso magnetico comporterà un aumento della velocità. Pertanto, per mezzo del flusso magnetico, la velocità può essere regolata solo verso l'alto.
3. Considerare le caratteristiche meccaniche nel controllo della velocità, modificando la resistenza della catena dell'ancora.
non dipende da R n, quindi le caratteristiche artificiali hanno un punto in comune.
La corrente di avviamento quando n = 0 ed E = 0 ha la forma e raggiunge valori inaccettabilmente grandi, che non consentono l'avvio del motore. Per ridurre le correnti di avviamento, nel circuito dell'indotto viene introdotta una resistenza aggiuntiva:
La corrente diminuisce e la caratteristica ha la forma:

Principio operativo (sull'esempio di un motore eccitazione parallela). Se la tensione U viene applicata al motore, la corrente I c scorre attraverso il circuito di eccitazione e la corrente I i scorre attraverso il circuito dell'indotto. La corrente di eccitazione crea MMF F in = I in W in, che eccita il flusso magnetico nella macchina F in. La corrente di armatura, a sua volta, crea un flusso magnetico della reazione di armatura F i. Il flusso magnetico risultante F res \u003d F in + F i.
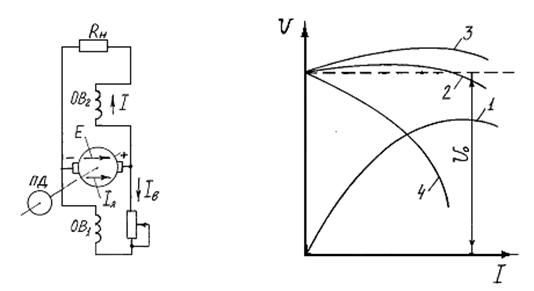
Fig.1.23 1.24
Nel circuito dell'indotto, la corrente I i crea una caduta di tensione R i I i. In accordo con la legge della forza elettromagnetica EMC, quando la corrente I I e il flusso magnetico F res interagiscono, si crea una coppia M BP. In regime stazionario M temp. \u003d M pr. Quando i conduttori dell'indotto attraversano il campo magnetico F res, secondo la legge dell'induzione elettromagnetica EMP, viene indotto un EMF, che è diretto contro la tensione di rete U.
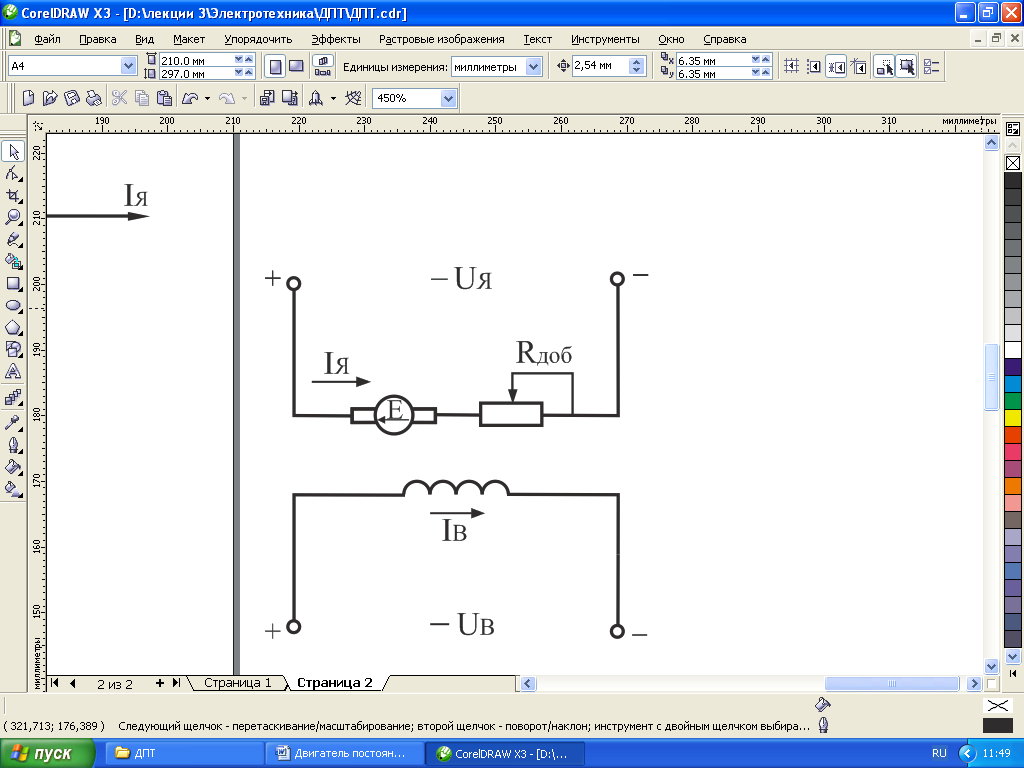
Classificazione dei motori. In base al circuito per l'accensione degli avvolgimenti di eccitazione dei poli principali, i motori CC sono suddivisi in motori di eccitazione indipendente, parallela, in serie e mista.
nei motori eccitazione indipendente l'avvolgimento di eccitazione è alimentato da una sorgente di tensione continua separata. Nei motori ad eccitazione parallela, l'avvolgimento di campo e l'avvolgimento dell'indotto sono collegati in parallelo e sono alimentati dalla stessa sorgente. Nei motori ad eccitazione in serie e mista, è presente un avvolgimento di eccitazione collegato in serie all'avvolgimento dell'indotto. Nei motori a bassa potenza, il flusso di eccitazione può essere creato utilizzando magneti permanenti. I motori ad eccitazione parallela e mista trovano la massima applicazione.
Equazioni di base e grandezze che caratterizzano i motori. Questi valori sono: potenza meccanica sull'albero P 2, tensione di alimentazione U, corrente assorbita dalla rete I, corrente di armatura I I, corrente di eccitazione I in, velocità di rotazione n, momento elettromagnetico Mamma. La relazione tra queste quantità è descritta:
Ø equazione della coppia elettromagnetica:
M em \u003d C m I I F;
Ø dall'equazione dello stato elettrico del circuito dell'indotto:
U \u003d E pr + R io io io; (1.4)
E pr \u003d C E nФ;
Ø equazione del momento:
M em \u003d M s + M sudore + M d,
dove M s è il momento di resistenza sull'albero creato dal carico; M sudore: il momento delle perdite create da tutti i tipi di perdite nel motore; M d - momento dinamico creato dalle forze d'inerzia;
Caratteristiche dei motori. La più importante delle caratteristiche è meccanica n (M s) - la dipendenza della velocità di rotazione n dalla coppia sull'albero (di seguito, l'indice "c" è omesso) a U = const, I в = const. Mostra l'influenza del carico meccanico (coppia) sull'albero motore sulla velocità, che è particolarmente importante da sapere quando si scelgono e si azionano i motori. Altre caratteristiche del motore: regolazione n (I c), alta velocità n (I i), funzionamento M, R 1, n, I, h (R 2) - non sono qui considerate in dettaglio.
Le caratteristiche meccaniche possono essere naturali o artificiali. Sotto naturale per caratteristiche si intendono le caratteristiche rilevate in assenza di eventuali resistenze aggiuntive nel circuito, ad esempio reostati in armatura o circuiti di eccitazione, artificiale- in presenza di tali resistenze.
Equazione meccanicacaratteristiche del motore. Può essere ottenuto da (1.1). Sostituiamo invece di E il suo valore in (1.4), quindi
n \u003d (U - R i I i) / C E F. (1.5)
Sostituendo I i con il suo valore dalla (1.2), otteniamo l'equazione caratteristiche meccaniche:
n= ![]() (1.6)
(1.6)
Il tipo di caratteristica meccanica è determinato dalla natura della dipendenza del flusso dal carico del motore, che a sua volta dipende dal circuito di accensione dell'avvolgimento di eccitazione.
Inversione del motore. L'inversione del motore è intesa come un cambiamento nel senso di rotazione della sua armatura. Possibili modi di invertire seguono dalla relazione (1.2). Se si cambia la direzione della corrente di armatura o il flusso della macchina, cambia il segno, e quindi la direzione della coppia. In pratica, ciò si ottiene commutando i conduttori o l'avvolgimento dell'indotto o l'avvolgimento di eccitazione. Tuttavia, la commutazione simultanea delle uscite di entrambi gli avvolgimenti o una variazione della polarità della tensione di alimentazione del motore (ad eccezione di un motore ad eccitazione indipendente) non comporta una variazione del segno della coppia e, quindi, una variazione di il senso di rotazione.
Avviare i motoricorrente continua. Ci sono due requisiti principali per l'avviamento dei motori: fornire la coppia necessaria per avviare e accelerare l'indotto e per evitare un flusso eccessivo attraverso l'indotto durante l'avviamento. alta corrente pericoloso per il motore. Sono praticamente possibili tre modalità di avviamento: avviamento diretto, avviamento quando un reostato è collegato al circuito dell'indotto e avviamento con sottotensione nella catena dell'ancora.
Con l'avviamento diretto, il circuito dell'indotto viene immediatamente inserito a piena tensione. Poiché al primo momento dell'avvio l'armatura è ferma (n = 0), non c'è back-emf (E pr = C E nF). Quindi da (1.4) segue che la corrente di partenza dell'armatura I i, p \u003d U / R i.
Poiché R i \u003d 0,02 ¸ 1,10 Ohm, allora io i, n \u003d (50 ¸ 100) io nom, il che è inaccettabile. Pertanto, l'avviamento diretto è possibile solo per motori a bassa potenza, dove I i, n (4¸6) I nom e l'accelerazione del motore dura meno di 1 s.
L'accensione all'accensione del reostato di avviamento R p in serie all'indotto sarà considerata utilizzando l'esempio del circuito di fig. 1.25. La corrente di spunto in questo caso è:
Io io, p \u003d U / (R io + R p). (1.7)
Resistenza R p \u003d U / I i, p - R i viene scelto in modo tale che al momento iniziale dell'avvio, quando E pr \u003d 0, I i, p \u003d (1,4¸2,5) I nom (un numero maggiore si riferisce ai motori meno potenza).
Quando l'armatura accelera, E pr aumenta, il che riduce la tensione sull'armatura (cioè, il numeratore (1.7) diminuisce) e viene emessa la resistenza del reostato R p.
Prima dell'avvio, viene visualizzato il reostato R p, necessario per garantire la massima portata e, quindi, la coppia all'avvio (M p \u003d C m I I, p F). Man mano che l'indotto accelera, viene introdotto il reostato R p fino al raggiungimento della velocità richiesta.
L'avviamento con una corrente di avviamento limitata è possibile quando l'indotto del motore è alimentato da una sorgente separata (generatore, raddrizzatore) con tensione regolabile. La limitazione della corrente di avviamento e l'accelerazione regolare del motore sono fornite da un graduale aumento della tensione di armatura da zero al valore richiesto.
Il metodo in esame trova applicazione nei sistemi di controllo e regolazione di potenti motori a corrente continua (vedi punto 1.14.3).
§ 115. CARATTERISTICHE DEI MOTORI DC
Le proprietà di funzionamento dei motori sono determinate dalle loro caratteristiche prestazionali, che sono le dipendenze del numero di giri t, coppia Me, corrente consumata I, potenza P1 ed efficienza η dalla potenza utile sull'albero P2- Queste dipendenze corrispondono alla naturale condizioni del motore, ovvero la macchina non è regolata e la tensione di rete rimane costante. Così
come con una variazione della potenza utile P2 (cioè il carico sull'albero), cambia anche la corrente nell'indotto
macchine, le caratteristiche prestazionali sono spesso tracciate in funzione della corrente di armatura. Le dipendenze della coppia e della velocità di rotazione dalla corrente nell'indotto per il motore di eccitazione parallela sono mostrate in fig. 152, e il diagramma di cento è mostrato sopra (vedi Fig. 151).
Il regime del motore è determinato dalla seguente espressione:
> Con un aumento del carico sull'albero motore, aumenta anche la corrente nell'indotto. Ciò provoca un aumento della caduta di tensione attraverso la resistenza dell'avvolgimento dell'indotto e dei contatti della spazzola.
Poiché la corrente di eccitazione rimane costante (la macchina non è regolata), anche il flusso magnetico è costante. Tuttavia, con un aumento della corrente nell'armatura, l'effetto smagnetizzante del flusso di reazione dell'armatura aumenta e il flusso magnetico Ф diminuisce leggermente. Un aumento di Iarya provoca una diminuzione della velocità del motore e una diminuzione di Ф aumenta la velocità. Tipicamente, la caduta di tensione influisce sulla variazione di velocità in misura leggermente maggiore rispetto alla risposta dell'indotto, in modo che all'aumentare della corrente dell'indotto, la velocità diminuisce. La variazione di velocità di questo tipo di motore è insignificante e non supera il 5% quando il carico passa da zero a nominale, cioè i motori ad eccitazione parallela hanno una caratteristica di velocità rigida.
Con un flusso magnetico costante, la dipendenza della coppia dalla corrente nell'armatura sarà rappresentata da una linea retta. Ma sotto l'influenza

La coppia del motore di reazione dell'indotto con un aumento del carico è una leggera diminuzione del flusso magnetico e la dipendenza del momento andrà leggermente al di sotto di una linea retta.
Lo schema del motore ad eccitazione sequenziale è mostrato in fig. 153. Il reostato di avviamento di questo motore ha solo due morsetti, poiché l'avvolgimento di eccitazione e l'indotto formano un circuito in serie. Le caratteristiche del motore sono mostrate in fig. 154. Regime del motore eccitazione sequenzialeè definito dalla seguente espressione:
![]()
dove rc è la resistenza dell'avvolgimento di eccitazione in serie. In un motore ad eccitazione in serie, il flusso magnetico non rimane costante, ma cambia drasticamente al variare del carico, il che provoca una variazione significativa della velocità. Poiché la caduta di tensione nella resistenza dell'indotto e nell'avvolgimento di campo è molto piccola rispetto alla tensione applicata, il numero di giri può essere determinato approssimativamente dalla seguente espressione:
Se trascuriamo la saturazione dell'acciaio, possiamo considerare il flusso magnetico proporzionale alla corrente nell'avvolgimento di campo, che è uguale alla corrente nell'armatura. Di conseguenza, per un motore ad eccitazione in serie, la velocità di rotazione è inversamente proporzionale alla corrente nell'indotto e il numero di giri diminuisce bruscamente all'aumentare del carico, cioè il motore ha una caratteristica di velocità dolce. Al diminuire del carico, la velocità del motore aumenta. Al minimo (Ia = 0), il regime del motore aumenta indefinitamente, cioè il motore va in overdrive.
Pertanto, una proprietà caratteristica dei motori ad eccitazione in serie è l'inammissibilità dell'eliminazione del carico, ovvero al minimo o a bassi carichi. Il motore ha un minimo carico consentito, che è il 25-30% del nominale. Quando il carico è inferiore alla velocità minima consentita del motore aumenta bruscamente, il che può causarne la distruzione. Pertanto, quando è possibile l'eliminazione o la brusca riduzione del carico, l'uso di motori con eccitazione in serie è inaccettabile.
Nei motori molto piccoli, l'eliminazione del carico non causerà runaway, poiché le perdite meccaniche del motore saranno sufficienti. carico pesante per lui.
La coppia del motore di eccitazione in serie, tenendo conto della relazione proporzionale tra il flusso magnetico e la corrente nell'armatura (F \u003d C "Ia), può essere determinata dalla seguente espressione:
dove K'=KC'
quelli. la coppia è proporzionale al quadrato della corrente. Tuttavia, a correnti elevate, la saturazione dell'acciaio influisce e la dipendenza del momento si avvicina a una linea retta. Pertanto, i motori di questo tipo sviluppano grandi coppie ai bassi regimi, il che è essenziale quando si avviano grandi masse inerziali e sovraccarichi. Questi motori sono ampiamente utilizzati nelle applicazioni di trasporto e sollevamento.
Con l'eccitazione mista è possibile sia l'accensione consonante che quella controcorrente degli avvolgimenti di eccitazione.
I motori con avvolgimenti opposti non sono molto utilizzati, poiché hanno scarse proprietà di avviamento e sono instabili.
Le caratteristiche di velocità dei motori ad eccitazione mista occupano una posizione intermedia tra le caratteristiche dei motori ad eccitazione in parallelo e in serie.
Con un aumento della corrente dell'indotto, il numero di giri dell'indotto diminuisce in misura maggiore rispetto ai motori ad eccitazione parallela, a causa dell'aumento del flusso magnetico causato dall'aumento della corrente nell'avvolgimento di campo in serie. Al minimo, il motore ad eccitazione mista non si scatena, poiché il flusso magnetico non diminuisce a zero a causa della presenza di un avvolgimento di campo parallelo.
Con un aumento del carico nei motori ad eccitazione mista, il flusso magnetico aumenta e la coppia aumenta in misura maggiore rispetto ai motori ad eccitazione parallela, ma in misura minore rispetto ai motori ad eccitazione in serie.
1. Il dispositivo delle macchine a corrente continua.
Le macchine a corrente continua, che possono funzionare sia come motore che come generatore, presentano numerosi vantaggi. Quando si avvia il motore, viene generata una grande coppia di avviamento. Pertanto, tali motori sono iroko utilizzati come trazione nei veicoli elettrici. Gli ampi limiti e la fluidità del controllo della velocità determinano l'uso di motori CC in una varietà di sistemi di controllo automatico.
I generatori CC vengono utilizzati per alimentare diverse unità di potenza (in particolare saldatrici di alta qualità).La potenza delle macchine CC è molto diversa:
da pochi watt a decine di kilowatt. Nei trasporti vengono utilizzati motori con una tensione di 550 V e una potenza di 40 - 45 kW (tram), con una tensione di 1500 V e una potenza fino a 12.000 kW (locomotive elettriche). L'efficienza nelle macchine DC è maggiore, maggiore è la potenza. Con potenza fino a 100 W l'efficienza = 62%, con potenza fino a 100 kW l'efficienza raggiunge il 91%. Lo svantaggio delle macchine DC è la presenza di un gruppo spazzole-collettore, che è uno dei componenti più inaffidabili della macchina. Considera il dispositivo della macchina DC più semplice:
1 - poli, che di solito rappresentano una bobina con un nucleo,
2 - indotto (o rotore) - parte rotante,
3 - conduttori nelle scanalature dell'armatura.
La parte fissa su cui sono fissati i poli è chiamata statore o induttore. L'induttore serve a creare il campo magnetico principale della macchina. GN - neutro geometrico, una linea che passa nel mezzo tra poli adiacenti.
La caratteristica progettuale più importante delle macchine DC è la presenza di un gruppo spazzole-collettore: 1 - spazzola, 2 - piastra di raccolta. Le uscite delle singole sezioni dell'avvolgimento dell'indotto sono adatte per le piastre del collettore. Il gruppo spazzole-collettore esegue:
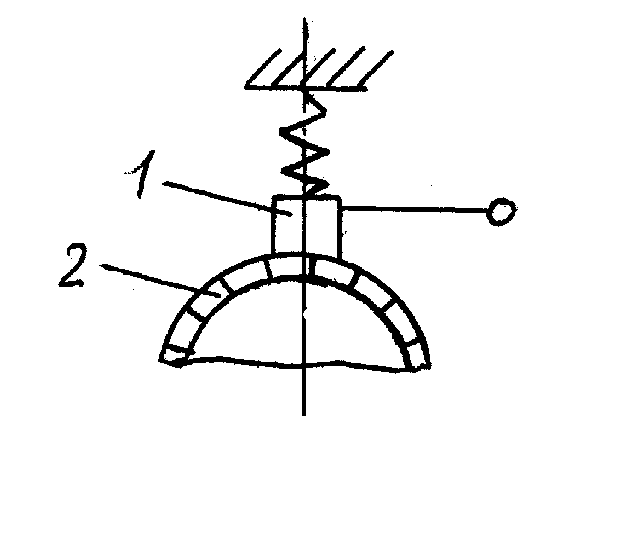
Contatto scorrevole tra conduttori esterni fissi e sezioni rotanti dell'avvolgimento dell'indotto,
Rettifica di corrente in modalità generatore,
Conversione della corrente continua in corrente alternata (invertente) in modalità motore.
Le macchine a corrente continua, come molte altre macchine elettriche, sono reversibili, cioè la stessa macchina può funzionare sia come generatore che come motore.
2. Il principio di funzionamento del generatore e del motore.
Nella modalità generatore, l'armatura della macchina ruota sotto l'influenza di un momento esterno. Tra i poli dello statore c'è un flusso magnetico costante che penetra nell'indotto. I conduttori dell'avvolgimento dell'indotto si muovono in un campo magnetico e, quindi, in essi viene indotto un EMF, la cui direzione può essere determinata dalla regola della "mano destra". In questo caso, sorge un potenziale positivo su un pennello rispetto al secondo. Se un carico è collegato ai terminali del generatore, la corrente scorrerà al suo interno. Dopo aver ruotato l'armatura di una certa angolazione, le spazzole verranno collegate a un'altra coppia di piastre, ad es. collegato a un altro giro dell'avvolgimento dell'indotto, l'EMF in cui avrà la stessa direzione. Pertanto, il generatore genera
corrente elettrica e la direzione di questa corrente che scorre attraverso il carico non cambia.
Quando il carico è collegato al generatore e con l'avvento della corrente dell'indotto, si verifica una coppia elettromagnetica sull'albero, diretta contro il senso di rotazione dell'indotto. In modalità motore vengono fornite le pinze della macchina pressione costante e la corrente scorre attraverso l'avvolgimento dell'indotto. I conduttori dell'avvolgimento dell'indotto sono nel campo magnetico della macchina creato dalla corrente di eccitazione e, quindi, su di essi, a norma di legge
Ampere, le forze agiranno. La combinazione di queste forze crea una coppia, sotto l'influenza della quale l'armatura ruoterà. Quando l'indotto ruota, nel suo avvolgimento viene indotto un EMF, che è diretto verso la corrente, e quindi per i motori è chiamato back-EMF.
3. Equazioni di coppia e fem dell'armatura.
Considera uno dei conduttori nella fessura dell'indotto. Lasciarlo muovere (durante la rotazione dell'indotto) con una velocità lineare V, quindi in questo conduttore viene indotto un EMF:
E \u003d V cf l i V peccato  ,
,
dove \u003d 90, lа - la lunghezza della parte attiva dell'armatura, V cf - l'induzione media del campo magnetico nello spazio vuoto.
Sia 2a il numero di rami paralleli. Poiché l'EMF è uguale all'EMF di un ramo, possiamo scrivere:

dove E i è l'EMF richiesto dell'indotto, N è il numero di tutti i conduttori dell'indotto.
dove Ф è il flusso magnetico di un polo e S è l'area attraversata da questo flusso, quindi

qui p è il numero di coppie di poli (p = 1,2, ...).
La velocità V può essere espressa in termini di velocità di armatura n:
Sostituendo le espressioni risultanti nella formula di E i:

quindi finalmente otteniamo:
E io \u003d C E F n.
Si può notare che l'EMF dell'indotto è proporzionale alla frequenza di rotazione dell'indotto e al flusso magnetico dei poli. Usando la legge di Ampere, troviamo la forza con cui il campo di eccitazione agisce su un conduttore d'indotto:
F = V cf l i I peccato
,
qui = 90 , I - corrente nel conduttore.
Questa forza crea una coppia:
dove D è il diametro dell'armatura. Moltiplicando per il numero totale di conduttori N, otteniamo il momento totale:
L'induzione media In cf, come prima, si ottiene dividendo il flusso magnetico di un polo per l'area permeata da questo flusso:
Poiché la corrente di armatura si diffonde lungo rami paralleli, la corrente in un conduttore è determinata dall'espressione:

Sostituendo le espressioni per B cf e I nella formula per il momento generale, otteniamo:

Se introduciamo un coefficiente costruttivo
quindi finalmente possiamo scrivere:
Come puoi vedere, il momento elettromagnetico della macchina DC è proporzionale al flusso magnetico dei poli e alla corrente di armatura.

La formula EMF dell'armatura Ea ottenuta sopra fornisce un valore medio dell'EMF. Infatti, il suo valore oscilla (impulsi) tra due valori limite - E min ed E max. Quando l'indotto ruota, parte delle spire, cortocircuitate dalle spazzole, viene disinserita dai rami paralleli, e durante il tempo l'indotto viene ruotato di un angolo corrispondente ad una piastra collettore, somma dei valori di EMF istantanei ha tempo per cambiare un po'. Il valore massimo delle pulsazioni EMF risultanti E = 0,5 (E max -E min) dipende dal numero di piastre collettori. Ad esempio, con un aumento di questo numero da 8 a 40, il valore di E diminuisce da 4V a 0,16V.
4. Reazione dell'indotto nelle macchine a corrente continua.
Quando una macchina DC è al minimo, il campo magnetico viene creato solo dagli avvolgimenti dei poli. La comparsa di corrente nei conduttori dell'indotto sotto carico è accompagnata dalla comparsa di un campo magnetico dell'indotto. Poiché la direzione delle correnti nei conduttori tra le spazzole è invariata, il campo dell'indotto rotante è fisso rispetto alle spazzole e ai poli di eccitazione.
L'avvolgimento dell'indotto diventa analogo ad un solenoide il cui asse coincide con la linea delle spazzole, quindi, quando le spazzole sono installate su neutri geometrici, il flusso dell'indotto è trasversale al flusso di eccitazione, e il suo effetto su quest'ultimo è chiamato reazione dell'indotto trasversale . Dopo aver costruito il vettore del flusso risultante, vediamo che ora ruota attorno all'asse geometrico dei poli principali. Il campo della macchina diventa asimmetrico, i neutri fisici ruotano rispetto a quelli geometrici. Nel generatore, sono spostati nella direzione di rotazione dell'indotto, nel motore - contro la direzione di rotazione dell'indotto.
Sotto il neutro fisico intendiamo la linea passante per il centro dell'indotto e il conduttore dell'avvolgimento dell'indotto, in cui l'EMF indotto dal flusso magnetico risultante è zero. La reazione laterale dell'indotto ha scarso effetto sulle prestazioni della macchina, di solito questo effetto non viene preso in considerazione. Tuttavia, quando le spazzole vengono spostate dal neutro geometrico, nel flusso dell'indotto appare una componente longitudinale, il suo effetto sul flusso polare è chiamato reazione dell'indotto longitudinale. Può essere sia magnetizzante che smagnetizzante in natura. In generale, la reazione dell'armatura porta ad una distorsione del campo sotto i poli e ad una variazione del flusso dei poli. Il primo può causare un aumento significativo delle scintille sotto le spazzole (fino alla comparsa di un incendio a tutto tondo sul collettore), il secondo nel generatore cambia la tensione ai terminali e nel motore la coppia e la velocità dell'indotto .
Per indebolire la reazione dell'indotto, viene aumentato il traferro tra lo statore e l'indotto, vengono utilizzate speciali spire cortocircuitate nelle scanalature delle espansioni polari. Nelle macchine ad alta potenza, a questo scopo viene utilizzato uno speciale avvolgimento di compensazione. Si inserisce nelle scanalature delle espansioni polari ed è collegato in serie al circuito dell'indotto, il suo flusso bilancia il flusso longitudinale dell'indotto.
Ti consigliamo di leggere
 Caratteristiche psicologiche dei bambini in adolescenza
Caratteristiche psicologiche dei bambini in adolescenza Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola
Trasferimento di un bambino in un'altra scuola: la procedura ei documenti necessari Se trasferire un bambino in un'altra scuola, diagnosi, trattamento Trattamento della clamidia urogenitale") Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale
Clamidia urogenitale - descrizione, cause, sintomi (segni), diagnosi, trattamento Trattamento della clamidia urogenitale I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa
I benefici e il significato dell'idroaminoacido treonina per il corpo umano L treonina cosa

