En muchos casos, los motores asíncronos trifásicos se utilizan para accionamientos que no requieren control de velocidad. Pero los motores asíncronos tienen valiosas ventajas: confiabilidad, bajo costo, diseño simple, alta eficiencia y peso relativamente bajo. Por estas razones, es natural intentar aplicarlas también a los variadores de velocidad.
Necesitamos información más específica sobre cuál es el resultado final deseado. Marcos; Hay varias maneras de acelerar su motor trifasico. Un remedio menos invasivo sería agregar un variador de frecuencia, a veces llamado convertidor de velocidad. Tenga en cuenta que a medida que aumenta la velocidad, el par disminuye si excede la velocidad nominal del motor. Estaremos encantados de ayudarle a determinar cuál de estos enfoques es mejor para su aplicación. Si su motor tiene un interruptor centrífugo en el circuito de arranque, no puede aumentar mucho la velocidad del motor.
- Esta es una pregunta bastante general.
- Si necesitas Información Adicional, Por favor llámanos.
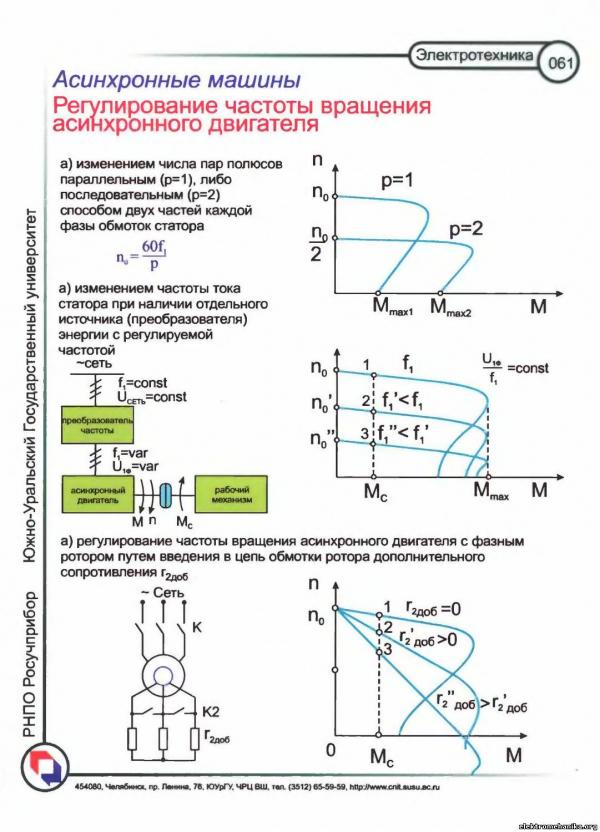
Para controlar la velocidad de los motores asíncronos con rotor de jaula de ardilla se suele utilizar el método de control de frecuencia, que es un control de velocidad suave campo magnético ajustando la frecuencia de la corriente en los devanados del estator, y el método de cambiar el número de pares de polos de un campo magnético giratorio, en el que la frecuencia de rotación del campo magnético cambia abruptamente.
¿El problema será que el motor eléctrico funcione muy bajo a 300 rpm? Incluso la altitud a la que opera el motor es importante, ya que el aire en altitudes más altas es menos denso y, por lo tanto, no proporciona el mismo efecto de enfriamiento. En zonas montañosas, puede ser necesario reducir la carga incluso a toda velocidad para garantizar una refrigeración suficiente del motor. Los detalles de su aplicación probablemente requerirán el uso de un motor de alta eficiencia y un ventilador de velocidad constante. El costo de un ventilador auxiliar dependerá del tamaño de la estructura del motor e incluso puede requerir algo de fabricación para descubrir cómo montarlo. ¡Gracias por cualquier consejo que puedas darme!
Para controlar la velocidad de rotación de los motores asíncronos con rotor de fase, se utiliza el método de control reostático, que es un control suave del deslizamiento del rotor cambiando la resistencia activa de sus devanados de fase.
Regulación de frecuencia. El método más prometedor de control de velocidad. Motor de inducción es control de frecuencia de CA del estator motor. Velocidad angular del campo giratorio n = 2 f/r. Por lo tanto, cuando cambia la frecuencia actual f, la velocidad angular del campo cambia proporcionalmente. Sin embargo, al realizar el control de frecuencia de la corriente, se debe tener en cuenta que es necesario un control de voltaje simultáneo. Esto se debe al hecho de que, de acuerdo con la expresión (14.10), la FEM de la fase y, por tanto, la tensión de alimentación, son proporcionales a la frecuencia y el caudal de corriente. Dado que el flujo debe permanecer igual en todos los modos, la tensión debe ser (sin tener en cuenta las caídas de tensión en la máquina) proporcional a la frecuencia. Además, esto es necesario para que cuando cambie la velocidad del motor, su par no cambie.
multipunto motor monofasico no es en realidad un motor de varias velocidades, es un motor de varios voltajes. Cuando se utilizan tomas de devanado para aumentar la resistencia del circuito, el motor se debilita y la carga hace que el motor disminuya su velocidad. Retire la carga y el motor funcionará a la misma velocidad independientemente de la grúa seleccionada. Si el motor se usa como motor de ventilador, se puede agregar un reóstato a la línea de entrada agregando una resistencia externa y amortiguando el motor para obtener la velocidad deseada. Si prefiere velocidades específicas en lugar de un rango de velocidades, puede agregar muestras y medidas de resistencia del aire. Solo tenga en cuenta que si su carga de trabajo cambia, también lo hará su velocidad. ¿Podemos cambiar el polo del motor de inducción trifásico?
Para evaluar la naturaleza de la dependencia del par de la frecuencia de la corriente en los devanados del estator y del voltaje en ella, despreciamos en la ecuación (14.28) la resistencia activa del devanado del estator gl y reactancias inductivas dispersión de los devanados del estator x pac 1 y rotor x ras 2 y use la expresión para la frecuencia de deslizamiento (14.13):
mvr= = un,
Por favor, dime las consecuencias. Sí, puede volver a enrollar el devanado para cambiar los polos magnéticos, pero al hacerlo necesitará cambiar algunas otras características del devanado. Para aumentar la cantidad de polos, debe cambiar el rango, el tamaño del cable y las vueltas por bobina para mantener la densidad de flujo magnético del diente y del hierro posterior en los estándares normales. Al mantener el mismo número de revoluciones, se debilita el motor y se reduce su capacidad para generar par. Motor de inducción con rotor de jaula de ardilla crea un gran generador cuando se mueve por encima de su velocidad síncrona.
dónde PERO= constante
Por lo tanto, al cambiar la frecuencia de la corriente, para mantener constante el par, es necesario cambiar proporcionalmente el voltaje en el estator; en otras palabras, la condición para mantener un par motor constante durante el control de frecuencia será U 1 /f= constante Si ajusta la frecuencia de corriente y voltaje, observando la condición especificada, las características mecánicas del motor permanecerán rígidas y momento máximo casi independiente de la frecuencia (disminuye significativamente sólo en un relativamente bajas frecuencias). Al mismo tiempo, la potencia cambiará en proporción a la frecuencia de la corriente, ya que PAG 2 = M vr. Por ejemplo, cuando la frecuencia actual se reduce por un factor de 2, la potencia del motor en el eje también se reduce a la mitad.
Las mismas características que hacen que este motor sea deseable sobre otros tipos de motores hacen que el generador de inducción sea deseable sobre otros tipos de generadores, es decir, la fuerza inherente del diseño de estructura de ardilla y la simplicidad de los sistemas de control.
Un motor de inducción se convierte en un generador cuando se conecta a la red eléctrica y luego es impulsado por encima de su velocidad síncrona por algún motor primario. El primer motor podría ser una turbina, un motor, un molino de viento o cualquier cosa capaz de proporcionar el par y la velocidad necesarios para llevar el motor a un estado de sobrevelocidad.
Regulación cambiando el número de pares de polos. Un cambio gradual en la velocidad angular de un motor de inducción en un amplio rango es factible a costa de complicar y aumentar el costo del diseño de un motor de inducción; esta es la regulación cambiando el número de pares de polos del motor.
A una frecuencia de red constante, la velocidad angular de un campo giratorio depende únicamente del número de pares de polos de este campo, determinado por el devanado del estator. Si se colocan dos devanados separados en el estator, uno formando R vapor, y el otro, formando R" pares de polos, entonces, al incluir el primer o segundo devanado en la red, obtendremos la frecuencia de rotación del campo:
El rendimiento como generador será ligeramente diferente al utilizado como motor. Las diferencias pueden ser tan pequeñas que no pueden detectarse mediante métodos de medición de campo convencionales. La principal ventaja del generador de inducción es la regulación de frecuencia. La velocidad debe ser controlada generador síncrono para que su frecuencia no se desvíe de la frecuencia lineal. La frecuencia de salida y los voltios están controlados por el sistema de potencia en los generadores de inducción y son independientes de los cambios de velocidad.
N 1 \u003d 60f / p o n" 1 = 60f/p", Como consecuencia,
n1/p" 1 =p"/p,
las velocidades del rotor del motor también variarán en consecuencia. En este caso, el devanado del rotor del motor debe hacerse como una rueda de ardilla.
El número de polos de los devanados del estator en este caso no está relacionado entre sí y puede elegirse cualquiera, según las condiciones de funcionamiento del motor. La regulación en sí se reduce a un cambio brusco en la frecuencia de rotación del campo motor. Pero la velocidad del rotor no puede cambiar abruptamente debido a la inercia de todo el sistema de accionamiento eléctrico. Solo después de la conmutación comienza el cambio correspondiente en la velocidad del rotor.
El efecto de autorregulación minimiza la complejidad del sistema de control. Los reguladores de generadores de inducción son muy similares a los que se utilizan para un motor de inducción, con algunas excepciones. En el caso de una pérdida de carga eléctrica, el par motor principal acelerará rápidamente el sistema a velocidades potencialmente peligrosas. Se requiere un freno, regulador o acelerador para evitar velocidades peligrosas. Interruptor eléctrico debe estar equipado para limitar la corriente cortocircuito. En caso de falla de cortocircuito en el sistema de potencia, el generador suministra una corriente de falla. Por lo general, fusibles limitadores de corriente. El par del motor primario debe limitarse para evitar que el generador se sobrecargue. Este control puede estar relacionado con el diseño del motor primario o puede basarse en señales de retroalimentación de la salida del generador. En un caso extremo, el motor principal puede empujar el par del generador, provocando una velocidad descontrolada. En algunos casos, la velocidad del motor primario puede caer por debajo de la velocidad síncrona del generador. Si esto sucede, el generador se impulsará para operar el sistema. Si tal respuesta no es deseable, entonces se puede cortar la energía con un relé de inversión de energía, o se puede usar un embrague de sobrecarga para permitir que el motor funcione sin carga. El sistema debe estar equipado con un limitador de velocidad. . Se puede usar un generador de inducción como motor para acelerar el sistema a la velocidad de operación, o se puede usar un motor principal para proporcionar aceleración.
Para mostrar este proceso transitorio más claramente, construimos dos características mecánicas máquina asíncrona con un número variable de pares de polos: una característica correspondiente a R pares de polos, y el segundo pag" = 1p pares de polos (respectivamente, Fig. 14.31, a y b). Supongamos que el momento en el eje del motor permanece constante cuando cambia la velocidad del campo. Con un aumento en este último, es decir, con la transición de R" a R pares de polos, el motor se encuentra primero en condiciones próximas al arranque y se produce un pico de corriente.
En este último caso, no es necesario tener en cuenta el momento de arranque y la corriente en el diseño de la máquina. Esto permite al diseñador obtener el máximo rendimiento a plena carga. El generador de inducción se utiliza cada vez más como un medio para recuperar energía que, de otro modo, se desperdiciaría. La energía generada puede consumirse en el sitio o venderse al sistema de servicios públicos que alimenta el sitio. Para convertir esta energía en energía eléctrica Se utilizan generadores de viento y agua.
Algunas aplicaciones típicas de los generadores de inducción. En caso de falla de vapor, el generador se puede utilizar como motor para accionar la bomba. Además, la bomba evitará que el sistema se acelere en caso de pérdida de carga eléctrica. La compañía de agua cree que puede comprar electricidad a precios bajos durante la noche y vender electricidad a una tarifa alta durante el período pico diurno. Construye tanques de almacenamiento altos y bajos e instala varias bombas. Por la noche, bombea agua de la piscina baja a la piscina alta, comprando electricidad a la empresa de servicios públicos. Durante los períodos pico, el agua fluye de regreso a través de las bombas, impulsando los motores como generadores. La energía se vende a las empresas de servicios públicos. Este circuito es tan simple que se puede controlar de forma remota. El viento sopla constantemente entre el desierto y las montañas de California. Un hombre emprendedor creó varias torres con molinos de viento que controlan generadores de inducción a través de cajas de cambios. La energía se genera en proporción a la velocidad del viento y se vende a una empresa de servicios públicos local. Debe evitarse el uso indiscriminado de motores de inducción como generadores. Es posible que un motor en particular no funcione bien como generador debido a la saturación magnética interna. Estrés interno como generador puede ser mayor que como motor con el mismo voltaje terminal. Las densidades magnéticas en una máquina están determinadas por el voltaje en el espacio de aire equivalente. Se acabó Alto voltaje en el entrehierro puede conducir a una saturación excesiva de la máquina, así como a altas pérdidas en el núcleo y aumento de las corrientes de magnetización. Se puede suponer que la máquina puede sobrecalentarse con una carga muy baja. Si se utiliza un motor de inducción como generador, el diseñador debe conocer esta información para que pueda hacer las concesiones adecuadas en las densidades magnéticas. Los motores de inducción suelen tener una potencia nominal de 460 voltios para su uso en un sistema de 480 voltios. Los generadores de inducción deben estar clasificados para la clasificación de voltaje del sistema o ligeramente más altos, no más bajos, ya que el generador es ahora la fuente de energía y no la carga en el sistema de energía. Los capacitores de corrección del factor de potencia se pueden usar para corregir el factor de potencia de un generador de la misma manera que para un motor de inducción. Sin embargo, si existe la posibilidad de que el generador tenga una velocidad excesiva, ya sea que esté conectado al sistema de energía o no, los capacitores deben conectarse al sistema a través de un interruptor separado para que cuando se abra el interruptor del generador, los capacitores no se conectado al generador. En condiciones de exceso de velocidad, los condensadores pueden sobrecargar el generador y provocar un alto voltaje descontrolado. Estos voltajes pueden destruir los sistemas de aislamiento del generador y también pueden ser peligrosos para otros equipos y personal. La fábrica de papel tiene un importante stock de combustible disponible en corteza y chatarra. . Los generadores de inducción están diseñados para aplicaciones específicas y no para uso general.
Pero al pasar de R a R", es decir, con una disminución en la frecuencia de rotación del campo, la máquina primero se encuentra en las condiciones de un modo generador y funciona, dando energía a la red.
Este modo se utiliza a veces para un frenado rápido y económico del accionamiento.
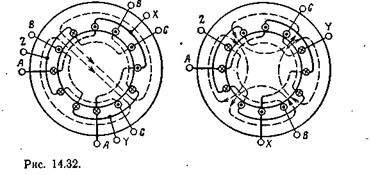
Se suministran dos devanados separados a los estatores solo para motores de baja potencia; para motores de alta potencia, es más conveniente cambiar bobinas del mismo devanado para obtener un número diferente de pares de polos. En la fig. 14.32 muestra el circuito de conmutación devanado trifásico de dos a cuatro polos. Cambiar el devanado en una relación diferente a 1:2 requiere un cambio de circuito más complejo y es menos común.
Póngase en contacto con su distribuidor local o representante de ventas para enviar una solicitud técnica. Solo aquellos que conocen las diferencias pueden elegir el método de control correcto al diseñar una unidad y, por lo tanto, mantener los costos lo más bajos posible.
Al diseñar un sistema de accionamiento eléctrico, es fundamental determinar los requisitos de precisión para el control de la aplicación. Si los requisitos son transparentes y especificados, el sistema de accionamiento se puede compilar y ajustar con los componentes necesarios. El objetivo principal es seleccionar los componentes correctos con requisitos de calidad de control específicos de una manera rentable; esta es la única forma de evitar gastos generales innecesarios si, por ejemplo, los requisitos se clasificaron demasiado altos o demasiado bajos.
En la mayoría de los casos, el estator de una máquina asíncrona se alimenta con dos devanados independientes, cada uno de los cuales se conmuta en una relación de 1:2 o diferente. Así, el motor tiene cuatro etapas de velocidad, por ejemplo 3000, > 1500, 1000 y 500 rpm.
Regulación reostática. En motores asíncronos trifásicos con rotor de fase, se utiliza un método reostático para controlar la velocidad del rotor. Esto se logra introduciendo un reóstato trifásico ajustable en el circuito de los devanados de fase del rotor, como cuando se arranca el motor (Fig. 14.24). Pero este reóstato debe estar diseñado para una carga de larga duración por la corriente del rotor, y no para una carga de corta duración, como un reóstato de arranque. Un aumento en la resistencia activa del circuito del rotor cambia la característica METRO(s) - lo hace más suave (ver fig. 14.25). Si, a un par constante en el eje del motor, la resistencia activa del circuito del rotor aumenta aumentando gradualmente la resistencia del reóstato (r p1< rp2< r р3), то рабочая точка будет смещаться с одной кривой Milisegundo) al siguiente, correspondiente al aumento de la resistencia del circuito del rotor (Fig. 14.25, puntos 1-4), según el cual aumentará el deslizamiento y, en consecuencia, disminuirá la velocidad del motor.
De esta forma, es posible cambiar la velocidad del rotor en el rango de nominal a parada total. Pero con este método de regulación, son inevitables pérdidas de energía relativamente grandes (ver § 14.11). Poder de campo giratorio R vr, pag sin tener en cuenta las pérdidas de energía en el núcleo del estator, consiste (ver Fig. 14.20) en las pérdidas de energía en los conductores del devanado del rotor (ver el circuito equivalente en la Fig. 14.19);
R pr2 \u003d r "in2 (I" 2) 2
P fur \u003d r "en 2 (I" 2) 2.
Actitud
R pr 2 / R mecánico \u003d s / (l -s) \u003d (n 1 - n)/n
muestra que al dividir la potencia mecánica disminuye en proporción directa a la disminución de la velocidad del rotor, al mismo tiempo, la proporción de pérdidas de potencia en la resistencia activa del circuito del rotor aumenta en consecuencia. Por lo tanto, para reducir la velocidad del motor, por ejemplo, en un 25%, es necesario incluir un reóstato en el circuito del rotor con tal resistencia activa, en el que una cuarta parte de la energía del campo magnético giratorio se convertirá inútilmente en calor. La desventaja de tal regulación también puede ser el hecho de que la inclusión de un reóstato en el circuito del rotor hace característica mecánica el motor es más suave, por lo tanto, reduce la estabilidad de su velocidad. Cuando el reóstato está encendido, pequeños cambios en la carga sobre el eje provocan cambios significativos en la velocidad del motor.
Hay posiciones en las instalaciones eléctricas en las que no se puede prescindir de un motor DC. Es este motor eléctrico el que se puede ajustar según la velocidad de giro del rotor, que se requiere en las instalaciones eléctricas. Es cierto que tiene muchas deficiencias, y una de ellas es el rápido desgaste de los cepillos si se instalaron con una curvatura, y su vida útil es bastante baja. Cuando se usa, se producen chispas, por lo que dicho motor no se puede utilizar en salas explosivas y polvorientas. Además de un motor eléctrico corriente continua cuesta caro. Para cambiar esta situación, utilice un motor asíncrono y un controlador de frecuencia para un motor asíncrono.
En casi todos los aspectos, los motores eléctricos que funcionan con corriente alterna son superiores a los análogos con corriente continua. En primer lugar, son más fiables. En segundo lugar, tienen dimensiones y peso más pequeños. En tercer lugar, el precio es más bajo. Cuarto, son más fáciles de operar y conectar.
Pero tienen un inconveniente: esta es la complejidad de regular la velocidad. En este caso, los métodos estándar para controlar la frecuencia de los motores asíncronos no funcionarán aquí, es decir, cambiar el voltaje, configurar la resistencia, etc. El control de frecuencia de un motor eléctrico asíncrono era el problema número uno. Aunque la base teórica se conoce desde los años treinta del siglo pasado. Todo se reducía al costo. convertidor de frecuencia. Todo cambió cuando se inventaron los microcircuitos, con la ayuda de los cuales, a través de los transistores, fue posible ensamblar un convertidor de frecuencia con un costo mínimo.
Principio normativo
Entonces, la forma de controlar la velocidad de un motor de inducción se basa en una fórmula. Aquí ella está abajo.
ω=2πf/p, donde
- ω es la velocidad angular de rotación del estator;
- f es la frecuencia del voltaje de entrada;
- p es el número de pares de polos.
Es decir, resulta que es posible cambiar la velocidad de rotación del motor eléctrico solo cambiando la frecuencia del voltaje. ¿Qué da en la práctica? El primero es el buen funcionamiento del motor, especialmente al arrancar el equipo, cuando el propio motor está funcionando bajo las cargas más altas. El segundo es un mayor deslizamiento. Debido a esto, aumenta la eficiencia y disminuye la pérdida de características de potencia.
La estructura del controlador de frecuencia.
Todos los convertidores de frecuencia modernos se basan en el principio de la llamada doble conversión. Eso es, corriente alterna se convierte en CC a través de un rectificador y un filtro no controlados. Además, a través de un inversor de pulsos (es trifásico), se produce la conversión inversa de corriente continua en corriente alterna. El inversor en sí consta de seis interruptores de alimentación (transistor). Entonces, cada devanado del motor eléctrico está conectado a ciertas llaves rectificadoras (positivas o negativas). Es el inversor el que cambia la frecuencia del voltaje que se aplica a los devanados del estator. De hecho, es a través de él que se produce la regulación de frecuencia del motor eléctrico.

En este dispositivo, los transistores de potencia están instalados en la salida. Actúan como llaves. Si los comparamos con los tiristores, cabe señalar que los primeros generan una señal en forma de sinusoide. Es esta forma la que crea una distorsión mínima.
Ahora el principio mismo de funcionamiento del convertidor de frecuencia. Para entender esto, proponemos desmontar la figura a continuación.
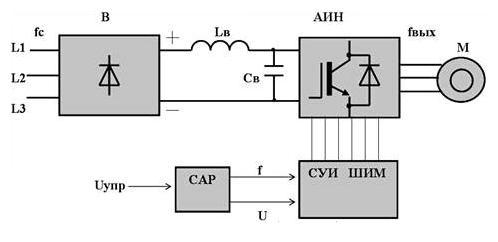
Entonces, repasemos la imagen, donde
- "B" es un rectificador de potencia de tipo diodo no controlado.
- "AIN" es un inversor autónomo.
- "SUI PWM" - un sistema de control de ancho de pulso.
- "SAR" - sistema de control automático.
- "Sv" - condensador de filtro.
- "Lv" - acelerador.
El diagrama muestra muy claramente que el inversor regula la frecuencia de voltaje debido al sistema de control de ancho de pulso (es de alta frecuencia). Es esta parte del regulador la responsable de conectar alternativamente los devanados del estator del motor eléctrico al polo positivo del rectificador y luego al negativo. La frecuencia de conexión a los polos ocurre a lo largo de una curva sinusoidal. En este caso, la frecuencia del pulso está determinada precisamente por la frecuencia PWM. Así es como funciona la regulación de frecuencia.
Le recomendamos que lea
, diagnóstico, tratamiento Tratamiento de la clamidia urogenital") Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital
Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué
Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército?
Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército? Manzanas al horno con requesón Manzanas al horno con requesón
Manzanas al horno con requesón Manzanas al horno con requesón

