Están determinados principalmente por la forma en que se enciende el devanado de excitación. Dependiendo de esto, los motores eléctricos se distinguen:
1. con estimulación independiente: el devanado de excitación es alimentado por una fuente externa corriente continua(excitador o rectificador),
2. Con excitación paralela : el devanado de campo está conectado en paralelo con el devanado de armadura,
3. : el devanado de campo está conectado en serie con el devanado de armadura,
4. con entusiasmo mixto: tiene dos devanados de excitación, uno conectado en paralelo con el devanado del inducido y el otro en serie con él.
Todos estos motores eléctricos tienen el mismo dispositivo y difieren solo en la implementación del devanado de excitación. Los devanados de excitación de estos motores eléctricos se realizan de la misma manera que para.
motor eléctrico corriente continua con estimulación independiente
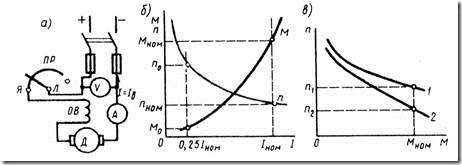
En este motor eléctrico (Fig. 1, a), el devanado del inducido está conectado a la fuente de CC principal (red de CC, generador o rectificador) con voltaje U, y el devanado de excitación está conectado a una fuente auxiliar con voltaje UB. El reóstato de control Rrv está incluido en el circuito del devanado de excitación y el reóstato de arranque Rn está incluido en el circuito del devanado del inducido.
El reóstato de ajuste se usa para regular la velocidad de rotación de la armadura del motor, y el reóstato de arranque se usa para limitar la corriente en el devanado de la armadura durante el arranque. característica distintiva motor eléctrico es que su corriente de excitación Iv no depende de la corriente Ii en el devanado del inducido (corriente de carga). Por lo tanto, despreciando el efecto desmagnetizador de la reacción del inducido, podemos suponer aproximadamente que el flujo del motor Ф no depende de la carga. Las dependencias del par electromagnético M y la velocidad de rotación n de la corriente Il serán lineales (Fig. 2, a). En consecuencia, la característica mecánica del motor también será lineal - dependencia n (M) (Fig. 2, b).
En ausencia de un reóstato con resistencia Rn en el circuito del inducido, la velocidad y las características mecánicas serán rígidas, es decir, con un pequeño ángulo de inclinación con respecto al eje horizontal, ya que la caída de tensión IаΣRя en los devanados de la máquina incluidos en el circuito del inducido en la carga nominal es solo 3-5 % de Unom. Estas características (líneas rectas 1 en la Fig. 2, ayb) se denominan naturales. Cuando se incluye un reóstato con resistencia Rn en el circuito de armadura, la pendiente de estas características aumenta, como resultado de lo cual es posible obtener una familia de características de reóstato 2, 3 y 4, correspondientes a diferentes significados Rn1, Rn2 y Rn3.
Arroz. 1. Diagramas esquemáticos de motores eléctricos. corriente continua con excitación independiente (a) y paralela (b)
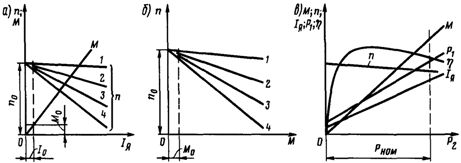
Arroz. 2. Características de los motores eléctricos corriente continua con excitación independiente y paralela: a - alta velocidad y par, b - mecánica, c - trabajo más resistencia Rn, cuanto mayor es el ángulo de inclinación que tiene la característica reostático, es decir, más suave es.
El reóstato de ajuste Rpv le permite cambiar la corriente de excitación del motor Ib y su flujo magnético F. En este caso, la velocidad de rotación n también cambiará.
No se instalan interruptores ni fusibles en el circuito del devanado de excitación, ya que cuando este circuito se rompe, el flujo magnético del motor eléctrico disminuye bruscamente (solo queda el flujo del magnetismo residual) y se produce un modo de emergencia. Si el motor eléctrico funciona al ralentí o con una pequeña carga en el eje, la velocidad aumenta bruscamente (el motor se vuelve loco). En este caso, la corriente en el devanado del inducido Ia aumenta considerablemente y puede producirse un incendio general. Para evitar esto, la protección debe desconectar el motor de la fuente de alimentación.
Un fuerte aumento en la velocidad de rotación cuando se rompe el circuito del devanado de excitación se explica por el hecho de que en este caso el flujo magnético Ф disminuye bruscamente (al valor del flujo Fost del magnetismo residual) y e. ds E y la corriente Iya aumenta. Y dado que el voltaje aplicado U permanece sin cambios, la velocidad de rotación n aumentará hasta e. ds E no alcanzará un valor aproximadamente igual a U (que es necesario para el estado de equilibrio circuito eléctrico anclas, en las que E= U - IаΣRя.
Cuando la carga en el eje se acerca a la nominal, el motor eléctrico se detendrá en caso de interrupción del circuito de excitación, ya que momento electromagnético, que el motor puede desarrollar con una disminución significativa en el flujo magnético, disminuye y se vuelve menor que el par de carga en el eje. En este caso, la corriente Ia también aumenta considerablemente y la máquina debe desconectarse de la fuente de alimentación.
Cabe señalar que la velocidad de giro n0 corresponde al ralentí ideal, cuando el motor no consume energía eléctrica de la red y su par electromagnético es nulo. En condiciones reales, en modo de ralentí, el motor consume la corriente de ralentí I0 de la red, que es necesaria para compensar pérdidas internas potencia, y desarrolla un cierto momento M0 requerido para vencer las fuerzas de fricción en la máquina. Por lo tanto, en realidad, la velocidad de ralentí es menor que n0.
La dependencia de la velocidad de rotación n y el par electromagnético M de la potencia P2 (Fig. 2, c) en el eje del motor, como se deduce de las relaciones consideradas, es lineal. Las dependencias de la corriente del devanado del inducido Iya y la potencia P1 en P2 también son casi lineales. La corriente I y la potencia P1 en P2 = 0 son la corriente sin carga I0 y la potencia P0 consumida sin carga. La curva de rendimiento tiene un carácter común a todas las máquinas eléctricas.
motor eléctrico corriente continua con excitación paralela
En este motor eléctrico (ver Fig. 1, b), los devanados de campo y de armadura se alimentan de la misma fuente de energía eléctrica con voltaje U. El reóstato de control Rpv está incluido en el circuito de devanado de campo, y el reóstato de arranque Rp está incluido en el circuito del devanado del inducido.
En el motor eléctrico considerado, existe esencialmente una fuente de alimentación separada para los circuitos del devanado de excitación y del inducido, como resultado de lo cual la corriente de excitación Iv no depende de la corriente del devanado de inducido Iv. Por lo tanto, un motor con excitación paralela tendrá las mismas características que un motor con excitación independiente. Sin embargo, un motor con devanado en derivación solo funciona correctamente cuando recibe alimentación de una fuente de CC de voltaje constante.
Cuando el motor eléctrico es alimentado por una fuente de tensión variable (generador o rectificador controlado), una disminución de la tensión de alimentación U provoca una correspondiente disminución de la corriente de excitación Iv y del flujo magnético F, lo que conduce a un aumento del devanado del inducido. corriente Ia. Esto limita la capacidad de controlar la velocidad del inducido cambiando la tensión de alimentación U. Por lo tanto, los motores eléctricos diseñados para ser alimentados por un generador o un rectificador controlado deben excitarse de forma independiente.
motor eléctrico corriente continua con excitación secuencial
Para limitar la corriente en el arranque, se incluye un reóstato de arranque Rp en el circuito del devanado del inducido (Fig. 3, a), y para controlar la velocidad de rotación, se puede conectar un reóstato de ajuste Rrv en paralelo con el devanado de campo.
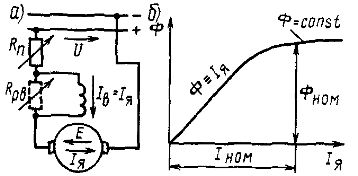
Arroz. 3. Diagrama esquemático del motor eléctrico. corriente continua con excitación en serie (a) y la dependencia de su flujo magnético Ф de la corriente Iа en el devanado del inducido (b)
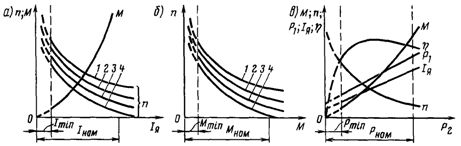
Arroz. 4. Características del motor eléctrico corriente continua con excitación secuencial: a - alta velocidad y par, b - mecánica, c - trabajadores.
Un rasgo característico de este motor eléctrico es que su corriente de excitación Iv es igual o proporcional (cuando el reóstato Rpv está encendido) a la corriente del devanado del inducido Ia, por lo que el flujo magnético Ф depende de la carga del motor (Fig. 3, b ).
Con corriente de devanado de armadura I, menos (0.8-0.9) Corriente nominal Enom el sistema magnético de la máquina no está saturado y podemos suponer que el flujo magnético Ф cambia en proporción directa a la corriente Iа. Es por eso característica de velocidad el motor eléctrico será suave: con un aumento en la corriente, la velocidad Ith n disminuirá bruscamente (Fig. 4, a). La disminución de la velocidad de rotación n se debe al aumento de la caída de tensión IяΣRя. en resistencia interna Rya. circuitos de bobinado de armadura, así como debido a un aumento en el flujo magnético F.
El momento electromagnético M con un aumento de la corriente Ia aumentará considerablemente, ya que en este caso también aumenta el flujo magnético F, es decir, el momento M será proporcional a la corriente Ia. Por lo tanto, a una corriente Ia menor que (0.8 N-0.9) Inom, la característica de velocidad tiene forma de hipérbola y la característica de momento tiene forma de parábola.
En corrientes Il > Inom, las dependencias de M y n en Il son lineales, ya que en este modo el circuito magnético estará saturado y el flujo magnético Ф no cambiará cuando cambie la corriente Il.
La característica mecánica, es decir, la dependencia de n de M (Fig. 4, b), se puede construir sobre la base de las dependencias de n y M de Ib. Además de la característica natural 1, es posible obtener una familia de características del reóstato 2, 3 y 4 al incluir un reóstato con resistencia Rp en el circuito del devanado del inducido, estas características corresponden a diferentes valores de Rn1, Rn2 y Rn3, mientras que a mayor Rn, menor característica.
La característica mecánica del motor considerado es suave y tiene un carácter hiperbólico. Con cargas bajas, el flujo magnético Ф disminuye considerablemente, la velocidad de rotación n aumenta bruscamente y puede exceder el valor máximo permitido (el motor se queda sin marcha). Por lo tanto, dichos motores no se pueden utilizar para accionar mecanismos que funcionan en modo inactivo y con poca carga (varias máquinas herramienta, transportadores, etc.).
Generalmente mínimo carga admisible para motores de gran y mediana potencia es (0,2.... 0,25) Inom. Para evitar que el motor funcione sin carga, está rígidamente conectado al mecanismo de accionamiento (engranaje o embrague ciego), el uso de una transmisión por correa o embrague de fricción es inaceptable.
A pesar de este inconveniente, los motores excitados en serie son muy utilizados, especialmente cuando hay grandes cambios en el par de carga y condiciones de arranque difíciles: en todos los accionamientos de tracción (locomotoras eléctricas, locomotoras diésel, trenes eléctricos, coches eléctricos, carretillas elevadoras eléctricas, etc.), así como en accionamientos de mecanismos de elevación de carga (grúas, ascensores, etc.).
Esto se explica por el hecho de que con una característica suave, un aumento en el par de carga conduce a un menor aumento en el consumo de corriente y potencia que en los motores con excitación independiente y en paralelo, por lo que los motores con excitación en serie toleran mejor las sobrecargas. Además, estos motores tienen un par de arranque mayor que los motores con excitación paralela e independiente, ya que con un aumento de la corriente del devanado del inducido en el arranque, el flujo magnético también aumenta en consecuencia.
Si aceptamos, por ejemplo, que la corriente de arranque a corto plazo puede ser 2 veces la corriente nominal de operación de la máquina, y despreciamos el efecto de saturación, la reacción del inducido y la caída de voltaje en el circuito de su devanado, entonces en un motor con excitación en serie, el par de arranque será 4 veces mayor que el nominal (tanto en corriente como en flujo magnético aumentan 2 veces), y en motores con excitación independiente y paralela, solo 2 veces más.
En realidad, debido a la saturación del circuito magnético, el flujo magnético no aumenta en proporción a la corriente, pero aun así el par de arranque de un motor excitado en serie, en igualdad de condiciones, será significativamente mayor que el par de arranque de mismo motor con excitación independiente o en paralelo.
Las dependencias de n y M de la potencia P2 en el eje del motor (Fig. 4, c), como se desprende de las disposiciones anteriores, no son lineales, las dependencias de P1, Ip y η de P2 tienen la misma forma que para Motores con excitación en paralelo.
motor eléctrico corriente continua con entusiasmo mixto
En este motor eléctrico (Fig. 5, a), el flujo magnético Ф se crea como resultado de la acción conjunta de dos devanados de excitación: paralelos (o independientes) y en serie, a través de los cuales las corrientes de excitación Iv1 e Iv2 \u003d Iа
Es por eso
![]()
donde Фposl es el flujo magnético del devanado en serie, que depende de la corriente Il, Фpar es el flujo magnético del devanado en paralelo, que no depende de la carga (determinado por la corriente de excitación Iв1).
La característica mecánica de un motor eléctrico con excitación mixta (Fig. 5, b) se encuentra entre las características de los motores con excitación en paralelo (recta 1) y en serie (curva 2). Dependiendo de la relación de las fuerzas magnetomotrices de los devanados en serie y en paralelo en modo nominal, es posible aproximar las características de un motor con excitación mixta a la característica 1 (curva 3 con un pequeño ppm del devanado en serie) o a la característica 2 (curva 4 para un pequeño ppm). con devanado paralelo).
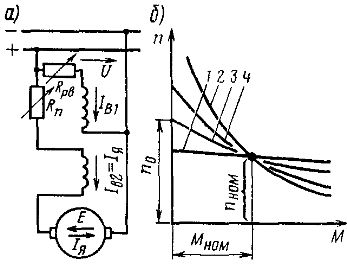
Arroz. 5. Diagrama esquemático de un motor eléctrico con excitación mixta (a) y sus características mecánicas (b)
La ventaja del motor. corriente continua con excitación mixta es que, al tener una característica mecánica suave, puede operar en reposo, cuando Fposl = 0. En este modo, la frecuencia de rotación de su armadura está determinada por el flujo magnético Фpar y tiene un valor limitado (el motor no se vuelve loco).
[documento]1.doc
Tarea #2(módulo 5)
“Motor de corriente continua con excitación en serie. Asignación de elementos. Principio de funcionamiento"
gr.TP-07
Asmolkova O. A.
I semestre 2009
Motor DC con excitación en serie. Asignación de elementos. Principio de funcionamiento
1. Dispositivo y propósito de los elementos del motor DC
.
motor de corriente continua - máquina eléctrica , máquina de corriente continua, transformando energía eléctrica DC en energía mecánica. Consiste, como todas las máquinas de CC, en un estator fijo con polos y un rotor giratorio (armadura) con un colector.
estator La máquina de CC consta de un marco cilíndrico (caja), polos con devanado de excitación y protectores de extremo ( arroz. 2.1.). En la cama, los polos principales (principales) se fortalecen para excitar el flujo magnético principal y los adicionales para mejorar la conmutación en el motor. El polo principal consiste en un núcleo de polo hecho de chapa de acero y atornillado al marco y una bobina de excitación. El núcleo en el extremo libre está provisto de una pieza polar para crear la distribución requerida de inducción magnética a lo largo de la circunferencia de la armadura. cama 3 es el yugo de la máquina, es decir, la parte que cierra el circuito magnético del flujo principal F. Está hecho de acero fundido, ya que el flujo magnético en él es relativamente constante. Se instalan postes adicionales en el marco entre los principales. Su devanado está conectado en serie con el devanado del inducido. El propósito de estos polos es crear un campo magnético adicional. Esto es necesario para que los cepillos del colector no brillen.
Ancla (rotor) se llama la parte de la máquina, en cuyo devanado, cuando gira en relación con el principal campo magnético Se induce EMF. Ancla 5 El motor de CC consta de un eje de acero, un núcleo dentado de acero, un devanado colocado en sus ranuras y un colector montado en el eje del inducido ( arroz. 2.1.). Los devanados de campo son necesarios para garantizar una interacción óptima entre los campos magnéticos del rotor y el estator (es decir, crear momento máximo en el rotor). parte característica del motor (o cualquier máquina eléctrica) DC es el colector. Este es un cilindro hueco ensamblado a partir de placas de cobre en forma de cuña aisladas entre sí. Las placas del distribuidor también están aisladas del eje del motor. Están conectados por conductores a los hilos de bobinado colocados en las ranuras de la armadura. El devanado giratorio está conectado al circuito externo por un contacto deslizante entre las escobillas y el conmutador. El colector en las máquinas de CC sirve para rectificar la FEM variable inducida en el devanado del inducido giratorio y para obtener un momento electromagnético constante en la dirección.
Arroz. 2. 1. Dispositivo de motor de CC:
1 - devanado de excitación;2 - postes;3 - cama;4 - punta de poste;5 - ancla;6 - conductores de bobinado de anclaje;
7 - núcleo de anclaje dentado;8 - espacio de aire de la máquina
2. Principio de funcionamiento del motor de corriente continua
2.1 Información general
Cuando el devanado del inducido gira en un campo magnético fijo, se induce en él una FEM variable, que cambia con la frecuencia:
Dónde norte- velocidad de rotación del inducido.
Cuando la armadura gira, una FEM variable actúa entre dos puntos cualesquiera del devanado de la armadura. Sin embargo, entre las escobillas de contacto fijas, actúa una EMF constante en magnitud y dirección. mi, igual a la suma de los valores instantáneos de la FEM inducida en todas las vueltas conectadas en serie de la armadura ubicada entre estos cepillos.
dependencia de los campos electromagnéticos mi del flujo magnético de la máquina y la velocidad de rotación de la armadura tiene la forma:
Al conectar el devanado del inducido a una red con tensión tu, CEM mi será aproximadamente igual al voltaje tu y la velocidad del rotor:
Por lo tanto, debido a la presencia de un colector, cuando una máquina de CC funciona en modo motor, la velocidad del rotor no está estrictamente relacionada con la frecuencia de la red, pero puede variar en un amplio rango al cambiar el voltaje. tu y flujo magnético F. El eje de simetría que separa los polos de una máquina de CC se llama su neutro geométrico.
Con un circuito externo abierto, la corriente en el devanado del inducido no fluirá, ya que los EMF inducidos en dos partes del devanado del inducido ubicados a ambos lados del neutro geométrico se dirigen de manera opuesta y se compensan mutuamente. Para suministrar la tensión máxima desde el devanado del inducido al circuito externo, este circuito debe estar conectado a dos puntos del devanado del inducido, entre los que opera la mayor diferencia de potencial, donde se deben instalar las escobillas. Cuando la armadura gira, los puntos se mueven desde el neutro geométrico, pero cada vez más nuevos puntos de bobinado se acercarán a los cepillos, entre los cuales actúa el EMF. mi, por lo que la EMF en el circuito externo no cambiará en magnitud y dirección. Para reducir las ondas EMF durante la transición de las escobillas de una placa colectora a otra, generalmente se incluyen al menos 16 conductores activos en cada rama paralela del devanado del inducido.
En la armadura, a través del devanado del cual fluye la corriente. yo, el momento electromagnético actúa:
Cuando la máquina está funcionando en modo motor, el par electromagnético está girando.
2.2 Reacción del inducido del motor de CC
En ralentí, el flujo magnético en el motor es creado solo por HC ^F en los devanados de excitación. En este caso, el flujo magnético F en con un espacio de aire constante entre la armadura y el núcleo del polo principal (que es típico de muchas máquinas de CC), se distribuye simétricamente con respecto al eje longitudinal de las máquinas.
Cuando la máquina está operando bajo carga, una corriente pasa a través del devanado del inducido y el NS del inducido crea su propio campo magnético. El efecto del campo del inducido sobre el campo magnético de la máquina se denomina reacción de anclaje. flujo magnético F ac creado por na ancla F ac en una máquina de dos polos, al instalar escobillas en neutro, se dirige a lo largo eje transversal máquinas, por lo que el campo magnético de la armadura se llama transversal. Como resultado del flujo F ac la distribución simétrica del campo magnético de la máquina se distorsiona y el flujo resultante F Corte se concentra principalmente en los bordes de los polos principales. En este caso, el neutro físico cama y desayuno(la línea que conecta los puntos del círculo de armadura en el que la inducción es cero) se desplaza con respecto a la geometría neutral a algún ángulo β (figura 2.2). En los motores, el neutro físico se desplaza en contra del sentido de giro.
Basado en la ley plena corriente La armadura NS, que actúa en el entrehierro a una distancia x del eje de los polos principales, está determinada por la expresión:
Por lo tanto, los anclajes NS F ac varía linealmente a lo largo de su circunferencia; debajo del medio del polo principal, es igual a cero, y en los puntos donde se instalan los cepillos, tiene un valor máximo. Inducción magnética en el aire
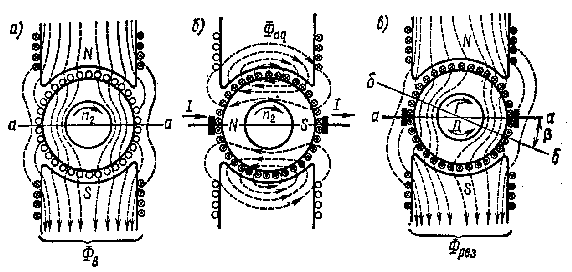
^ Fig2.2 - El campo magnético de un motor DC: a) del devanado de excitación; b) del devanado del inducido; c) resultante (F en - flujo magnético en x.x.; F ac - flujo magnético creado por la armadura NS; F Corte - corriente resultante; a-a - neutro geométrico; bb - físico neutral; β – ángulo de desplazamiento neutro b-b)
Juego con sistema magnético no saturado:
Donde es el valor del entrehierro en el punto x.
2.3 Par motor de CC
Si el devanado de campo y la armadura del motor están conectados a una red de CC con un voltaje ^T entonces, hay un par electromagnético METRO em. Par útil METRO en el eje del motor es menor que electromagnético por el valor del momento opuesto creado en la máquina por las fuerzas de fricción e igual al momento METRO X en modo x.x., es decir METRO = METRO em -METRO X .
Par de arranque el motor debe ser mayor que el freno estático METRO t en el estado de reposo del rotor, de lo contrario la armadura del motor no comenzará a girar. En estado estacionario (en n = const) hay un equilibrio de los momentos de rotación M y de frenado M t:
METRO = METRO em – M X = METRO t
Se sabe por la mecánica que potencia mecánica motor se puede expresar en términos de par y velocidad angular
Por tanto, el par útil del motor ^M(N·m) expresado en términos de potencia neta R(kW) y velocidad norte(rpm),
M=9550P/n
Analicemos algunas cuestiones importantes sobre el arranque y el funcionamiento de los motores de CC. De la ecuación del estado eléctrico del motor se sigue que
yo yo = (U -- E)/R yo
En el modo de funcionamiento, la corriente de armadura I I está limitada e. ds mi, si n es aproximadamente igual a norte nombre. En el momento del lanzamiento, n = 0, e. ds mi = 0 y corriente de arranque yo PAGS = tu/ R yo 10-30 veces más que nominal. Por lo tanto, el arranque directo del motor, es decir, la conexión directa de la armadura a la tensión de red, es inaceptable. Para limitar la alta corriente de arranque del inducido, se conecta un reóstato de arranque en serie con el inducido antes del arranque. R PAGS con poca resistencia. En este caso, cuando mi = o
yo PAGS =U/(R yo -R PAGS ) << U/R yo
resistencia del reóstato RPAGS se selecciona de acuerdo con la corriente de armadura admisible.
A medida que el motor acelera a la velocidad nominal e. ds mi aumenta, y la corriente disminuye y el reóstato de arranque se elimina gradualmente y por completo (los reóstatos de arranque se calculan para el encendido a corto plazo). Ajuste del reóstato R registro en un circuito de excitación con una resistencia relativamente alta (decenas y centenas de ohmios) antes de arrancar el motor, se elimina por completo para que en el arranque la corriente de excitación y el flujo magnético del estator F eran nominales. Esto conduce a un aumento del par de arranque, lo que garantiza una aceleración rápida y fácil del motor.
Después del arranque y la aceleración, ocurre una operación de estado estable del motor, en la que el par de frenado en el eje ^ Mt será equilibrado por el momento desarrollado por el motor METRO em , es decir. METRO em == M t ( a norte = coahora. )
Los motores de corriente continua pueden restablecer el estado estable de funcionamiento perturbado por un cambio en el par de frenado, es decir, pueden desarrollar par METRO, igual al nuevo valor del par de frenado METRO t a una velocidad correspondientemente nueva norte".
En efecto, si el par de frenado de la carga M t es mayor que el par motor METRO em, entonces la velocidad del inducido disminuirá. A voltaje constante tu y fluir F esto provocará una disminución. ds mi armadura, aumentando la corriente de armadura y el par hasta que se alcanza el equilibrio, en el que METRO em = METRO t y norte" < norte. Cuando el par de frenado se reduce a M t, el modo de operación de estado estable se establece de manera similar en METRO em = METRO t" y norte"> norte" . Por lo tanto, los motores de CC tienen la propiedad de autorregulación. - puede desarrollar un par igual al par de frenado.
2.4 Control de frecuencia
La velocidad del inducido de un motor de CC se determina en función de la ecuación de estado eléctrico tu= miR yo yo yo después de sustituir e en él. ds mi = pies cuadradosnorte:

Caída de voltaje de armadura R yo yo yo pequeño: a carga nominal, no excede 0,03 - 0,07 tu nombre .
Por lo tanto, la velocidad de un motor de CC es directamente proporcional a la tensión de red aplicada e inversamente proporcional al flujo magnético del estator. . Hay dos formas de regular la velocidad del motor: cambiando el flujo del estator F o el voltaje U suministrado al motor. El control de velocidad mediante el cambio del campo magnético de la máquina se realiza mediante un reóstato de ajuste en el circuito de excitación del motor. El voltaje suministrado al motor se cambia ajustando el voltaje de la fuente.
Puede agregar un reóstato adicional al circuito de armadura. En este caso, el reóstato de arranque se reemplaza por un lastre R etc. Dicho reóstato realiza las funciones tanto de un reóstato de arranque como de un reóstato de ajuste. En este caso, la ecuación de frecuencia de rotación del inducido para un motor de CC tiene la forma
De esto se deduce que la regulación de la velocidad del motor puede realizarse modificando la tensión de red, la resistencia del reóstato de balasto o el flujo del estator.
Inversión del motor. De la ecuación del par motor METRO em = kFyo yo se deduce que la inversión, es decir, el cambio de la dirección de rotación de la armadura, se puede realizar cambiando la dirección de la corriente en el devanado de excitación (flujo F) o corriente de armadura.
Para invertir el motor "sobre la marcha", se cambia la dirección de la corriente del inducido (cambiando los cables del inducido), y el devanado de excitación no se cambia, ya que tiene una gran inductancia y es inaceptable interrumpir su circuito con corriente. La inversión del motor desconectado también se realiza cambiando la dirección de la corriente en el devanado de campo (cambiando sus salidas).
3. Motor con excitación en serie
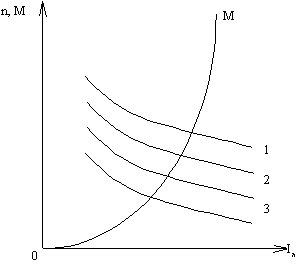
En un motor con excitación en serie ( figura 2.3a) la corriente de excitación es igual a la corriente de armadura: yo en = yo a, por lo que el flujo magnético Ф es una función de la corriente de carga yo a. La naturaleza de esta función varía dependiendo de la magnitud de la carga. A yo a <(0,8...0,9) I nombre cuando el sistema magnético no está saturado, f=k F yo a, y el coeficiente de proporcionalidad A F en un rango significativo de cargas permanece casi constante. Con un mayor aumento en la carga, el flujo F creciendo más lento que yo a >yo nombre) podemos suponer que F = constante. De acuerdo con esto, las dependencias también cambian. n=f(yo a ), M=f(yo a) (arroz. 2.3.b).
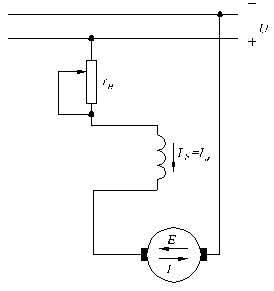
Arroz. 2.3. - a) esquema del motor con excitación secuencial; b) la dependencia de su par y velocidad de rotación de la corriente de armadura (I yo – corriente de armadura; yo en – corriente de excitación;r norte
- resistencia de carga;
norte- Velocidad rotacional; 1 - característica natural; 2,3 - características reostáticas correspondientes a diferentes valores de resistencia adicional r norte ).
Además de las características naturales 1, es posible obtener una familia de características de reóstato 2, 3 y 4 al incluir resistencias adicionales r n en el circuito de armadura Cuanto mayor sea el valor de r n, menor será la característica.
Con cargas bajas, la velocidad n aumenta bruscamente y puede exceder el valor máximo permitido (el motor entra en "espaciado"). Por lo tanto, dichos motores no pueden utilizarse para accionar mecanismos que funcionan en modo inactivo y con poca carga.
Con una característica rígida, la velocidad de rotación n casi no depende del momento M, por lo tanto, la potencia:
![]() , dónde DE 4
- constante.
, dónde DE 4
- constante.
Con una característica suave del motor, n es inversamente proporcional, como resultado de lo cual:
![]() , donde es una constante.
, donde es una constante.
Por lo tanto, cuando el momento de carga cambia en un amplio rango, la potencia R 2 , y por lo tanto el poder R 1 y actual yo a cambio en motores excitados en serie en menor medida que en un motor excitado en paralelo, además, toleran mejor las sobrecargas.
En este motor, el devanado de campo está conectado en serie al circuito de armadura (Fig. 29.9, a), es por eso flujo magnéticoF depende de la corriente de carga yo = yo a = yo en . Con cargas bajas, el sistema magnético de la máquina no está saturado y la dependencia del flujo magnético de la corriente de carga es directamente proporcional, es decir F = kf yo a (k F- coeficiente de proporcionalidad). En este caso, encontramos el momento electromagnético:
La fórmula de frecuencia de rotación tomará la forma
 . (29.15)
. (29.15)
En la fig. 29.9, b datos de rendimiento presentados M = F(yo) y n= (yo) motor de excitación serie. A altas cargas, se produce la saturación del sistema magnético del motor. En este caso, el flujo magnético prácticamente no cambia al aumentar la carga y las características del motor se vuelven casi rectilíneas. La característica de velocidad del motor de excitación en serie muestra que la velocidad del motor cambia significativamente con los cambios de carga. Esta característica se llama suave.
Arroz. 29.9. Motor de excitación secuencial:
a- diagrama de circuito; b- características de presentación; c - características mecánicas; 1 - característica natural; 2 - característica artificial
Con una disminución en la carga del motor de excitación secuencial, la velocidad de rotación aumenta bruscamente y, con una carga inferior al 25% del valor nominal, puede alcanzar valores que son peligrosos para el motor ("sobreimpulso ”). Por tanto, es inaceptable el funcionamiento de un motor de excitación en serie o su arranque con una carga en el eje inferior al 25% de la nominal.
Para una operación más confiable, el eje del motor de excitación secuencial debe estar rígidamente conectado al mecanismo de trabajo por medio de un acoplamiento y un engranaje. El uso de una transmisión por correa es inaceptable, ya que si la correa se rompe o se reinicia, el motor puede "agotarse". Teniendo en cuenta la posibilidad de operar el motor a velocidades aumentadas, los motores de excitación en serie, según GOST, se prueban durante 2 minutos para exceder la velocidad en un 20% por encima del máximo indicado en la placa de identificación, pero no menos del 50% por encima de la nominal.
Características mecánicas motor de excitación en serie n=f(M) se presentan en la fig. 29.9, en. Curvas bruscamente descendentes de características mecánicas ( naturales 1 y artificiales 2 ) proporcionan al motor de excitación secuencial un funcionamiento estable bajo cualquier carga mecánica. La capacidad de estos motores para desarrollar un gran par proporcional al cuadrado de la corriente de carga es importante, especialmente en condiciones de arranque difíciles y durante sobrecargas, ya que con un aumento gradual en la carga del motor, la potencia en su entrada aumenta más lentamente. que el par. Esta característica de los motores de excitación en serie es una de las razones de su aplicación amplia como motores de tracción en transporte, así como motores de grúa en instalaciones de elevación, es decir, en todos los casos de accionamiento eléctrico con condiciones de arranque difíciles y combinación de cargas importantes en el eje del motor con baja velocidad.
Cambio de velocidad nominal del motor de excitación en serie
 , (29.16)
, (29.16)
dónde norte - velocidad de rotación a una carga del motor del 25% de la nominal.
La velocidad de rotación de los motores de excitación en serie se puede controlar cambiando voltaje u, o el flujo magnético del devanado de excitación. En el primer caso, un ajuste reóstato R rg (Figura 29.10, a). Con un aumento en la resistencia de este reóstato, el voltaje en la entrada del motor y la frecuencia de su rotación disminuyen. Este método de control se utiliza principalmente en motores de pequeña potencia. En el caso de una potencia de motor significativa, este método es antieconómico debido a las grandes pérdidas de energía en R rg . Además, reóstato R rg , calculado sobre la corriente de funcionamiento del motor, resulta engorroso y caro.
Cuando varios motores del mismo tipo funcionan juntos, la velocidad de rotación se regula cambiando el esquema de su inclusión entre sí (Fig. 29.10, b). Entonces, cuando los motores están conectados en paralelo, cada uno de ellos está bajo tensión de red completa, y cuando dos motores están conectados en serie, cada motor representa la mitad de la tensión de red. Con el funcionamiento simultáneo de un mayor número de motores, es posible un mayor número de opciones de conmutación. Este método de control de velocidad se utiliza en locomotoras eléctricas, donde se instalan varios motores de tracción idénticos.
Es posible cambiar el voltaje suministrado al motor cuando el motor se alimenta de una fuente de CC con voltaje regulado (por ejemplo, según un circuito similar a la Fig. 29.6, a). Con una disminución en el voltaje suministrado al motor, sus características mecánicas se reducen, prácticamente sin cambiar su curvatura (Fig. 29.11).
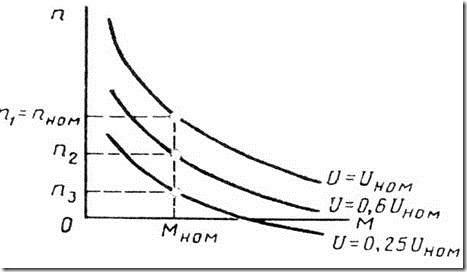
Arroz. 29.11. Características mecánicas de un motor de excitación en serie con cambio en la tensión de entrada
Hay tres formas de regular la velocidad del motor cambiando el flujo magnético: derivando el devanado de excitación con un reóstato rrg , seccionando el devanado de excitación y derivando el devanado de armadura con un reóstato r w . Encendido del reóstato rrg , desviando el devanado de excitación (Fig. 29.10, en), así como una disminución en la resistencia de este reóstato conduce a una disminución en la corriente de excitación yo en \u003d yo a - yo rg , y en consecuencia, a un aumento de la velocidad de rotación. Este método es más económico que el anterior (ver Fig. 29.10, a), se usa con más frecuencia y se estima mediante el coeficiente de regulación
 .
.
Por lo general, la resistencia del reóstato rrg tomado para que krg >= 50% .
Al seccionar el devanado de campo (Fig. 29.10, GRAMO) apagar parte de las vueltas del devanado va acompañado de un aumento en la velocidad de rotación. Al derivar el devanado del inducido con un reóstato r w (ver figura 29.10, en) la corriente de excitación aumenta yo en \u003d yo a + yo rg , lo que provoca una disminución de la velocidad de rotación. Este método de regulación, aunque proporciona una regulación profunda, no es económico y se usa muy raramente.
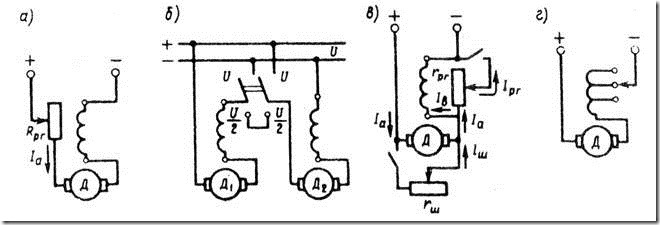
Arroz. 29.10. Regulación de la velocidad de rotación de motores de excitación serie
Le recomendamos que lea
, diagnóstico, tratamiento Tratamiento de la clamidia urogenital") Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital
Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué
Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército?
Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército? Manzanas al horno con requesón Manzanas al horno con requesón
Manzanas al horno con requesón Manzanas al horno con requesón

