เฮ้ Geektimes!
การจัดการโหลดที่ทรงพลังเป็นหัวข้อที่ค่อนข้างเป็นที่นิยมในหมู่ผู้ที่เกี่ยวข้องกับระบบอัตโนมัติในบ้าน และโดยทั่วไป โดยไม่คำนึงถึงแพลตฟอร์ม ไม่ว่าจะเป็น Arduino, Rapsberry Pi, Unwired One หรือแพลตฟอร์มอื่น เปิดหรือปิดฮีตเตอร์บางประเภท หม้อน้ำหรือพัดลมท่อไม่ช้าก็เร็วต้อง
ลักษณะตัวเก็บประจุของโหลด
สิ่งต่างๆ จะซับซ้อนขึ้นเมื่อคุณดูเมื่อความตึงเครียดเปลี่ยนไป ระหว่างมอเตอร์ที่เปิดอยู่และหยุดนิ่ง แรงดันไฟฟ้าจะส่งกระแสไฟ แต่เนื่องจากมอเตอร์ต้องการกระแสไฟเพิ่มเติมเพื่อสร้างสถานะของสถานะ มอเตอร์จะดึงกระแสไฟมากกว่ากำลังที่กำหนดของมอเตอร์ กระแสนี้เรียกว่ากระแสไหลเข้าหรือกระแสไหลเข้า กระแสไฟฟ้าเพิ่มเติมนี้จำเป็นสำหรับสองสามมิลลิวินาทีในขณะที่มอเตอร์เข้าสู่สถานะคงที่
ภาวะที่กลืนไม่เข้าคายไม่ออกแบบดั้งเดิมนี่คือสิ่งที่ในความเป็นจริงเพื่อเดินทาง อย่างที่หลายคนเห็นจากประสบการณ์ที่น่าเศร้าของพวกเขา การถ่ายทอดของจีนไม่มีความน่าเชื่อถือที่เหมาะสม - เมื่อเปลี่ยนโหลดอุปนัยที่ทรงพลัง หน้าสัมผัสจะจุดประกายอย่างแรง และในช่วงเวลาที่ดีพวกเขาสามารถติดได้ เราต้องใส่รีเลย์สองตัว - ตัวที่สองเพื่อเปิดตาข่ายนิรภัย
เนื่องจากสายเคเบิลที่เชื่อมต่อแหล่งกำเนิดกับมอเตอร์และสายไฟที่ทำให้ขดลวดภายในมอเตอร์มีความต้านทาน ความจุ และความเหนี่ยวนำในตัวเอง จึงเป็นสิ่งสำคัญที่จะต้องพิจารณาผลกระทบที่มีต่อทั้งระบบ ความต้านทานมีผลเหมือนกันระหว่างการเริ่มต้นหรือสถานะคงที่ แต่การเหนี่ยวนำและความจุจะส่งผลต่อสถานะไดนามิกเท่านั้น ดังนั้นกระแสเริ่มต้นของคุณจะเอาชนะปัจจัยเหล่านี้ในระหว่างการสตาร์ทมอเตอร์ของคุณ
เมื่อแรงดันไดนามิกถูกนำไปใช้กับโหลด กระแสจะไม่เท่ากันกับแรงดันไฟ ซึ่งหมายความว่ากระแสไฟฟ้าจะขับแรงดันไฟฟ้าหรือแรงดันไฟฟ้าล่าช้า วิธีที่ง่ายที่สุดในการดูสิ่งนี้คือการใช้ไดอะแกรมเวกเตอร์ ความต้านทานมาจากแหล่งกำเนิดไปทางขวา การเหนี่ยวนำมาจากแหล่งกำเนิดขึ้น และความจุมาจากแหล่งกำเนิดลง
แทนที่จะใช้รีเลย์ คุณสามารถใส่ triac หรือโซลิดสเตตรีเลย์ (อันที่จริงแล้ว ไทริสเตอร์หรืออุปกรณ์ภาคสนามตัวเดียวกันที่มีวงจรควบคุมสัญญาณลอจิกและออปโตคัปเปลอร์ในกรณีหนึ่ง) แต่พวกมันมีอีกค่าลบ - มันร้อนขึ้น ดังนั้นจึงจำเป็นต้องมีหม้อน้ำซึ่งจะช่วยเพิ่มขนาดของโครงสร้าง
ฉันต้องการพูดคุยเกี่ยวกับความเรียบง่ายและค่อนข้างชัดเจน แต่ในขณะเดียวกันโครงการหายากที่สามารถทำได้:
ทั้ง 3 อย่างนี้ส่งผลต่อพลังงานที่ต้องการจากแหล่งกำเนิดเพื่อทำให้มอเตอร์หมุนและแรงดันไฟเป็นไดนามิก นี่คือที่มาของตัวประกอบกำลัง งานที่ทำโดยมอเตอร์นั้นเทียบเท่ากับกำลังที่กำหนดของมอเตอร์ แต่เฉพาะกำลังงานที่สูญเสียไปภายในค่าความต้านทานของมอเตอร์เท่านั้น กำลังไฟฟ้าที่สูญเสียไปในความจุหรือการเหนี่ยวนำของมอเตอร์หรือสายเคเบิลจะสูญหาย
อย่าพยายามเข้าใจว่าแหล่งที่มาของคุณเห็นการใช้พลังงานทั้งหมดเช่นกัน เช่น การรวมของจริงและปรากฏชัดเจน ซึ่งหมายความว่าโดยการลดกำลังที่ชัดเจนของโหลดแต่ละครั้ง คุณสามารถเพิ่มโหลดจำนวนมากขึ้นไปยังแหล่งเดียวกันได้ อันที่จริง เราตั้งเป้าที่จะลดตัวประกอบกำลังเป็น 95-98 ด้วยเหตุผลหลายประการ
- การแยกอินพุตและโหลดด้วยไฟฟ้าแบบกัลวานิก
- การสลับโหลดอุปนัยโดยไม่มีกระแสและแรงดันไฟกระชาก
- ไม่มีการสร้างความร้อนที่สำคัญแม้กำลังสูงสุด
แต่ก่อนอื่น มีภาพประกอบเล็กน้อย ในทุกกรณี มีการใช้รีเลย์ซีรีส์ TTI TRJ และ TRIL และใช้เครื่องดูดฝุ่น 650 วัตต์เป็นโหลด
ตัวประกอบกำลังน้อยกว่า 95 มักจะถูกลงโทษโดยซัพพลายเออร์ สาธารณูปโภคซึ่งได้ค่า power factor ดีกว่า 98 ถือว่าแพงจริง ๆ และไม่คุ้มกับการลงทุนใน power factor ตัวเดียว ทำให้เกิดปัญหามลภาวะฮาร์มอนิกอื่นๆ ตัวประกอบกำลังที่ "แย่กว่า" มากกว่า 95 ทำให้สิ้นเปลืองพลังงานและเงิน . เนื่องจากค่าไฟฟ้าของคุณลดลงด้วยการติดตั้งอุปกรณ์แก้ไขตัวประกอบกำลัง อุปกรณ์จะจ่ายเองภายใน 3 ปี คุณจึงใช้งานเกือบตลอดเวลา
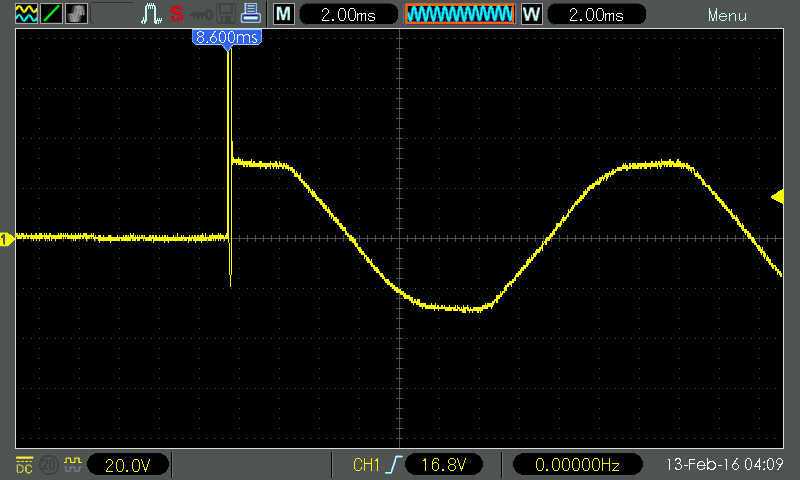
รูปแบบคลาสสิก - เราเชื่อมต่อเครื่องดูดฝุ่นผ่านรีเลย์ทั่วไป จากนั้นเราเชื่อมต่อออสซิลโลสโคปกับเครื่องดูดฝุ่น (ข้อควรระวัง! ไม่ว่าจะเป็นออสซิลโลสโคปหรือเครื่องดูดฝุ่น - หรือดีกว่าทั้งคู่ - ต้องแยกจากพื้นดินด้วยไฟฟ้า! อย่าปีนเข้าไปในเครื่องปั่นเกลือด้วยนิ้วและไข่ของคุณ! คุณทำไม่ได้ ตลกกับ 220 V!) และดูสิ
รวม:

ถ้าคุณต้องการ ข้อมูลเพิ่มเติมแจ้งให้เราทราบเนื่องจากเป็นหัวข้อที่ซับซ้อนในการแก้หัวของคุณและใช้ความรู้ระดับกลาง นี้ใช้พลังงานแม่เหล็กในการผลิตงาน เครื่องใช้ไฟฟ้า มอเตอร์ และอุปกรณ์อื่นๆ ส่วนใหญ่สามารถจัดประเภทเป็นแบบอุปนัยหรือแบบบูรณะ และมักเกี่ยวข้องกับวิธีการดูดซับและประมวลผลพลังงาน วงจรอุปนัยมักจะมีขนาดใหญ่และมักใช้คอยล์หรือระบบกำหนดเส้นทางอื่นๆ ในการจัดเก็บและจัดส่งพลังงาน และด้วยเหตุนี้จึงมักพบในการใช้งานในภาคอุตสาหกรรมและงานหนัก
ฉันต้องเกือบถึงแรงดันไฟหลักสูงสุด (การพยายามผูกรีเลย์แม่เหล็กไฟฟ้ากับการข้ามศูนย์เป็นงานที่หายนะ: มันช้าเกินไป) การดีดออกสั้น ๆ ที่มีแนวหน้าเกือบจะในแนวตั้งดังขึ้นทั้งสองทิศทาง สัญญาณรบกวนก็บินไปทุกทิศทาง ที่คาดหวัง.
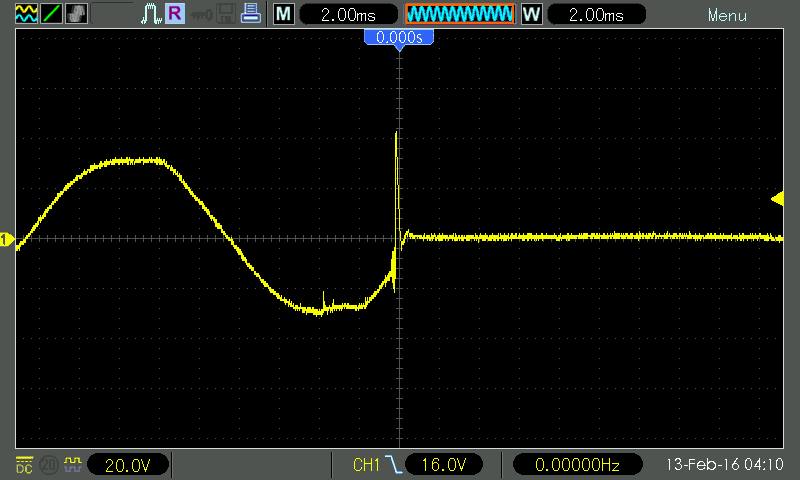
ปิด:

ตัวอย่างทั่วไป ได้แก่ หม้อแปลงไฟฟ้า มอเตอร์ไฟฟ้า และรีเลย์ไฟฟ้าเครื่องกล เครื่องมือประเภทนี้โดยทั่วไปจะเก็บพลังงานไว้จนกว่าจะจำเป็น และเมื่อพร้อมใช้งาน เครื่องมือเหล่านี้จะแปลงเป็นชุดของสนามแม่เหล็ก ร่วมกันกระบวนการนี้เรียกว่า "การเหนี่ยวนำ" โหลดประเภทนี้มักจะต้องใช้และป้องกันเพื่อให้พลังงานไหลไปในทิศทางเดียวเท่านั้น เนื่องจากแรงของพลังงานอาจทำให้วงจรเสียหายหรือเบรกเกอร์วงจรที่เชื่อมต่ออยู่
ไฟฟ้าวัดเป็นหน่วยแยกกันตามความต้องการเอาท์พุต แต่ในกรณีส่วนใหญ่ ปริมาณพลังงานทั้งหมดที่ผ่านวงจรจะเรียกว่า "โหลด" ณ จุดที่อุปกรณ์ดูดซับหรือใช้พลังงานจริง โหลดอาจมีขนาดใหญ่หรือเล็กและมีจุดแข็งต่างกันในการใช้งานที่แตกต่างกัน
การสูญเสียแรงดันไฟฟ้าอย่างรวดเร็วบนโหลดอุปนัยไม่เป็นลางดี - ไฟกระชากพุ่งขึ้น นอกจากนี้ คุณเห็นเสียงรบกวนเหล่านี้ในเสี้ยววินาทีไซนัสก่อนปิดเครื่องจริงหรือไม่? นี่คือประกายไฟของหน้าสัมผัสรีเลย์ที่เริ่มเปิดเพราะวันหนึ่งมันจะเดือด
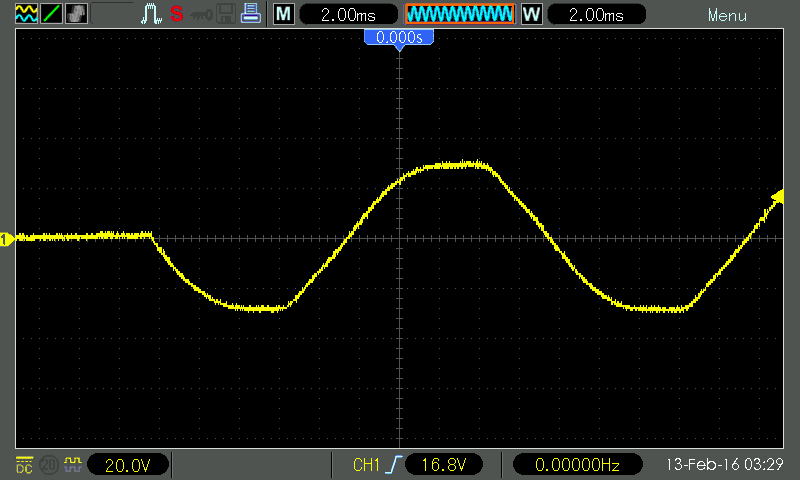
ดังนั้นจึงไม่ดีที่จะเปลี่ยนโหลดอุปนัยด้วยรีเลย์ "เปล่า" พวกเราจะทำอะไร? ลองเพิ่ม snubber - วงจร RC ของตัวต้านทาน 120 โอห์มและตัวเก็บประจุ 0.15 uF
ในกรณีส่วนใหญ่ โหลดมีสองประเภท และแบบจำลองอุปนัยมักมีลักษณะเฉพาะโดยการใช้สนามแม่เหล็กไฟฟ้า แม่เหล็กไฟฟ้าในการตั้งค่าเหล่านี้จะบังคับให้พลังงานเคลื่อนจากแหล่งกำเนิด เช่น เอาต์พุตหรืออะแดปเตอร์แรงดันไฟฟ้า ไปยังใจกลางของวงจร ซึ่งสามารถนำไปใช้จ่ายไฟได้ ไม่ว่าอุปกรณ์จะเป็นอย่างไร
เมื่อสัญญาณแรงดันไฟต่างกันถูกนำไปใช้กับสายไฟของตัวเหนี่ยวนำ ตัวเหนี่ยวนำจะแปลงไฟฟ้าเป็นสนามแม่เหล็กไฟฟ้า เมื่อถอดส่วนต่างของแรงดันไฟฟ้าออกจากสายไฟ ตัวเหนี่ยวนำจะพยายามรักษาปริมาณ กระแสไฟฟ้าไหลผ่านมัน จะคายประจุเมื่อสนามแม่เหล็กไฟฟ้าถูกทำลาย หรือหากมีการสร้างเส้นทางไฟฟ้าระหว่างตัวนำเหนี่ยวนำสองตัว
รวม:
ดีขึ้นแต่ไม่มาก การดีดออกช้าลงในความสูง แต่โดยทั่วไปจะคงไว้
ปิด:
ภาพเดียวกัน. เศษซากยังคงอยู่นอกจากนี้ประกายไฟของหน้าสัมผัสรีเลย์ยังคงอยู่แม้ว่าจะลดลงอย่างมาก
ตัวอย่างคือมอเตอร์ไฟฟ้า ในกรณีเหล่านี้ โหลดจะใช้เพื่อแปลงกระแสไฟฟ้าเป็นงานทางกายภาพ โดยปกติแล้วจะใช้พลังงานมากกว่าในการเริ่มหมุนโรเตอร์ที่จุดเริ่มต้นมากกว่าที่จะทำให้โรเตอร์หมุนอยู่แล้วอยู่ในการเคลื่อนที่ และเมื่อแรงดันไฟฟ้าถูกนำไปใช้กับขั้วของมอเตอร์ มอเตอร์จะทำให้เกิดการเปลี่ยนแปลง การเปลี่ยนแปลงนี้ทำให้เกิด แรงเคลื่อนไฟฟ้าซึ่งต่อต้านแรงไปข้างหน้าซึ่งเริ่มการหมุนของเครื่องยนต์ ปรากฏการณ์นี้เรียกว่าแรงเคลื่อนไฟฟ้าย้อนกลับ
ซึ่งหมายความว่าโหลดดังกล่าวจะต้องใช้แหล่งจ่ายไฟที่สามารถให้พลังงานไฟฟ้าเพียงพอในการสตาร์ทมอเตอร์ แหล่งจ่ายไฟนี้ยังต้องให้พลังงานเพียงพอในการรันมอเตอร์เมื่อจำเป็น กระบวนการอุปนัยมักจะมีแนวโน้มที่จะเกิดสิ่งที่เรียกว่า "การเป่า" ซึ่งหมายความว่าพลังงานจะไม่ได้รับการทดสอบและสามารถโอเวอร์โหลดวงจรได้หากไม่จำกัด นอกจากนี้ โหลดอุปนัยบางอย่าง เช่น โหลดในรีเลย์ระบบเครื่องกลไฟฟ้า สามารถส่งพัลส์ของพลังงานกลับเข้าไปในวงจรเมื่อไฟฟ้าถูกถอดออกจากโหลด ซึ่งอาจทำให้วงจรเสียหายได้
สรุป: ด้วยการดูแคลน ดีกว่าไม่มี snubber แต่ทั่วโลกไม่แก้ปัญหา อย่างไรก็ตาม หากคุณต้องการสลับโหลดอุปนัยด้วยรีเลย์ทั่วไป ให้ติดตั้งตัวลดแรงตึง ต้องเลือกการให้คะแนนสำหรับโหลดเฉพาะ แต่ตัวต้านทาน 1 วัตต์ 100-120 โอห์มและตัวเก็บประจุ 0.1 ยูเอฟดูเหมือนจะเป็นตัวเลือกที่เหมาะสมสำหรับกรณีนี้
การอ่านที่เกี่ยวข้อง: Agilent - Application Note 1399 "การเพิ่มช่วงชีวิตสูงสุดของรีเลย์ของคุณ" เมื่อรีเลย์ทำงานบนโหลดประเภทที่แย่ที่สุด - มอเตอร์ซึ่งนอกจากจะเหนี่ยวนำแล้วยังมีความต้านทานต่ำมากเมื่อสตาร์ทเครื่อง - ผู้เขียนที่ดีแนะนำให้ลดอายุหนังสือเดินทางของรีเลย์ ห้าครั้ง.
ด้วยเหตุนี้ อุปกรณ์และเครื่องจักรส่วนใหญ่ที่ผลิตในลักษณะนี้จึงมี "ไดโอด" ป้องกันซึ่งโดยทั่วไปทำหน้าที่เป็น เบรกเกอร์วงจรและต้องการให้พลังงานเข้าไปได้ แต่ห้ามไม่ให้ไหลกลับออกมาด้วย เมื่อปิดเครื่อง ไฟกระชากจะกระจายออกไป ทำให้เกิดเส้นทางไฟฟ้าทางเดียวผ่านตัวเหนี่ยวนำ มันจะกระจายกระแสไฟฟ้าจนกว่าสนามแม่เหล็กไฟฟ้าจะยุบตัวหรือจนกว่ากระแสไฟกระชากจะเพียงพอที่จะกระตุ้นไดโอด
โหลดไฟฟ้าเป็นส่วนประกอบทางไฟฟ้าที่เป็นส่วนหนึ่งของ วงจรไฟฟ้าซึ่งใช้พลังงานไฟฟ้าและซ่อนไว้ในพลังงานรูปแบบอื่น โดยปกติ โหลดไฟฟ้าจะเชื่อมต่อกับขั้วเอาต์พุตของแหล่งจ่ายแรงดันไฟ เนื่องจากเป็นอุปกรณ์ที่ใช้จ่ายไฟ
และตอนนี้ มาสร้างความเคลื่อนไหวของอัศวินกันเถอะ - เราจะรวม triac ไดรเวอร์ triac ที่มีการตรวจจับเป็นศูนย์และรีเลย์เป็นวงจรเดียว

ในแผนภาพนี้คืออะไร? ซ้ายมือเป็นทางเข้า เมื่อใช้ "1" ตัวเก็บประจุ C2 จะชาร์จผ่าน R1 และครึ่งล่างของ D1 เกือบจะในทันที opto-relay VO1 เปิดขึ้นรอการข้ามศูนย์ถัดไป (MOC3063 - พร้อมวงจรตรวจจับศูนย์ในตัว) และเปิด triac D4 การโหลดเริ่มต้นขึ้น
โหลดไฟฟ้าสามารถจำแนกได้เป็นประเภทต่าง ๆ ตามปัจจัยหลายประการ เช่น โหลด, โหลด, โหลดหมวดหมู่ผู้บริโภค, ความสำคัญของโหลด, จำนวนเฟสของโหลดไฟฟ้าและตามหน่วยของโหลดไฟฟ้า
การจำแนกประเภทโหลดไฟฟ้าโดยทั่วไปขึ้นอยู่กับโหลด กล่าวคือ โหลดความต้านทาน โหลดอุปนัย โหลด capacitive และโหลดรวม กระแสโหลดจำกัดกระแส พลังงานไฟฟ้าในวงจรและแปลงเป็นพลังงานความร้อนและแสง ตัวอย่างเช่น หลอดไฟและเครื่องทำความร้อนมีทั้งโหลดแบบต้านทาน
ตัวเก็บประจุ C1 ถูกชาร์จผ่านสายโซ่ของ R1 และ R2 ซึ่งใช้เวลาประมาณ t=RC ~ 100ms เหล่านี้เป็นช่วงเวลาของแรงดันไฟหลัก นั่นคือ ในช่วงเวลานี้ triac จะมีเวลาเปิดเครื่องอย่างแน่นอน จากนั้น Q1 จะเปิดขึ้น - และรีเลย์ K1 เปิดขึ้น (เช่นเดียวกับ LED D2 ที่ส่องประกายด้วยแสงสีมรกตที่น่ารื่นรมย์) หน้าสัมผัสรีเลย์จะแยก triac ออกไปจนกว่าจะปิด - จะไม่มีส่วนร่วมในการทำงาน และก็ไม่ร้อน
โหลดประเภทนี้ใช้ไฟฟ้าในลักษณะที่แรงดันและคลื่นกระแสจะยังคง "อยู่ในเฟส" ระหว่างกัน ดังนั้นตัวประกอบกำลังสำหรับโหลดความต้านทานจึงเป็นเอกภาพ ความต้านทานโหลดตัวต้านทานวัดเป็นโอห์มและกำลังวัดเป็นวัตต์
โหลดอุปนัยต้านทานการเปลี่ยนแปลงและการใช้งานในปัจจุบัน สนามแม่เหล็กสำหรับการทำงาน. โหลดอุปนัยมีขดลวดที่เก็บพลังงานแม่เหล็กเมื่อกระแสไหลผ่าน ตัวอย่างเช่น หม้อแปลงไฟฟ้า เครื่องกำเนิดไฟฟ้า และมอเตอร์เป็นโหลดอุปนัย
ปิดเครื่อง - ในลำดับที่กลับกัน ทันทีที่ "0" ปรากฏขึ้นที่อินพุต C1 จะคายประจุอย่างรวดเร็วผ่านต้นแขนของ D1 และ R1 รีเลย์จะปิด แต่ไทรแอกยังคงเปิดอยู่ประมาณ 100 มิลลิวินาที เนื่องจาก C2 ถูกคายประจุผ่าน 100 กิโลโอห์ม R3 ยิ่งกว่านั้น เนื่องจาก triac ถูกเปิดไว้โดยกระแสไฟ แม้หลังจากปิด VO1 แล้ว ก็จะยังคงเปิดอยู่จนกว่ากระแสโหลดจะลดลงในครึ่งรอบถัดไปที่ต่ำกว่ากระแสที่กักเก็บ triac
โหลดประเภทนี้ทำให้คลื่นปัจจุบัน "อยู่นอกเฟส" กับคลื่นแรงดัน ทำให้คลื่นกระแส "หน่วง" คลื่นแรงดัน ดังนั้นตัวประกอบกำลังสำหรับโหลดอุปนัยจึงล้าหลัง โหลด capacitive นั้นตรงกันข้ามกับโหลดอุปนัย โหลด capacitive ต้านทานการเปลี่ยนแปลงแรงดันไฟฟ้าและเก็บไฟฟ้า ตัวอย่างเช่น ธนาคารตัวเก็บประจุและตัวสตาร์ทมอเตอร์เป็นโหลดแบบคาปาซิทีฟ
โหลดประเภทนี้ทำให้คลื่นปัจจุบัน "อยู่นอกเฟส" กับคลื่นแรงดัน ทำให้คลื่นกระแส "นำ" คลื่นแรงดัน ดังนั้นปัจจัยด้านกำลังสำหรับโหลดแบบ capacitive จึงเป็นผู้นำ โหลดไฟฟ้าส่วนใหญ่ไม่ใช่ตัวต้านทานแบบเหนี่ยวนำหรือแบบคาปาซิทีฟล้วนๆ โหลดที่ใช้งานได้จริงจำนวนมากใช้ตัวต้านทาน ตัวเหนี่ยวนำ และตัวเก็บประจุหลายตัวร่วมกันเพื่อให้ได้ฟังก์ชันเฉพาะ ตัวอย่างเช่น มอเตอร์มักใช้ตัวเก็บประจุเพื่อช่วยในการสตาร์ทและวิ่ง
รวม:
ปิดตัวลง:

สวยใช่มั้ยล่ะ ยิ่งกว่านั้นเมื่อใช้ triac สมัยใหม่ที่ทนต่อการเปลี่ยนแปลงอย่างรวดเร็วของกระแสและแรงดันไฟฟ้า (ผู้ผลิตรายใหญ่ทั้งหมดมีรุ่นดังกล่าว - NXP, ST, Onsemi ฯลฯ ชื่อขึ้นต้นด้วย "BTA") ไม่จำเป็นต้องใช้ snubber เลย ในรูปแบบใดก็ได้
ตัวประกอบกำลังของภาระดังกล่าวน้อยกว่าความสามัคคีและมีความล้าหลังหรือเป็นผู้นำ การใช้รีเลย์สากลสำหรับโหลดอุปนัยไม่ควรเสียสละขนาด ต้นทุน หรือข้อได้เปรียบในการใช้งาน ปัญหาที่น่าผิดหวังที่สุดประการหนึ่งสำหรับวิศวกรควบคุมและช่างเทคนิคคือความล้มเหลวที่อาจเกิดขึ้นในช่วงต้นของการแทรกสอดหรือแทรกแซงรีเลย์ที่ใช้สำหรับโหลดอุปนัย นี่เป็นเรื่องจริงโดยเฉพาะอย่างยิ่งกับ "ก้อนน้ำแข็ง" สากลและรีเลย์ขนาดกะทัดรัดที่ได้รับความนิยมเพิ่มขึ้นเรื่อยๆ แม้ว่ารีเลย์จะมีขนาดใหญ่พอที่จะจ่ายพลังงานให้กับโหลดที่มีความต้านทานต่ำ เช่น มอเตอร์ขนาดเล็ก โซลินอยด์ กระแสตรงและคอยล์คอนแทคเตอร์
ยิ่งกว่านั้นถ้าเราจำ คนฉลาดจาก Agilent และดูว่ากระแสไฟที่ใช้โดยมอเตอร์เปลี่ยนไปอย่างไร คุณจะได้ภาพนี้:
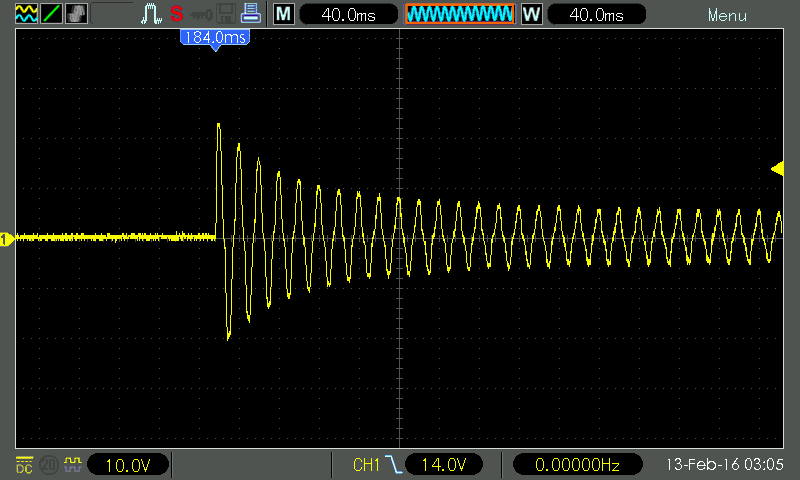
กระแสไฟเริ่มต้นเกินกระแสไฟที่ใช้งานมากกว่าสี่เท่า ในช่วงห้าช่วงแรก - เวลาที่ triac นำการถ่ายทอดในวงจรของเรา - กระแสจะลดลงประมาณครึ่งหนึ่งซึ่งทำให้ข้อกำหนดสำหรับการถ่ายทอดอ่อนลงอย่างมากและยืดอายุการใช้งาน
เหตุใดรีเลย์ 6A DC จึงล้มเหลวก่อนเวลาอันควรเมื่อขับโซลินอยด์ DC ด้วยกระแสไฟ 1A หรือน้อยกว่า จะหลีกเลี่ยงปัญหาเหล่านี้ได้อย่างไร? จำเป็นต้องเสียสละขนาด ต้นทุน และประโยชน์ในการใช้งานของรีเลย์จริงๆ หรือไม่? วัตถุประสงค์ทั่วไปเมื่อเคลื่อนย้ายโหลดอุปนัย? หากคุณพบว่าตัวเองถามคำถามประเภทนี้หรือจัดการกับความหงุดหงิดที่มักจะตามมา แสดงว่าคุณเป็นหนึ่งในบรรดาผู้ที่ต่อสู้กับ "ปีศาจโหลดอุปนัย" ที่เคยมีมา
ใช่ วงจรมีความซับซ้อนและมีราคาแพงกว่ารีเลย์ทั่วไปหรือไตรแอกทั่วไป แต่บ่อยครั้งก็คุ้มค่า
การติดตั้งตัวกรองการปรับให้เรียบแบบพาสซีฟที่เอาต์พุตของวงจรเรียงกระแสมีผลอย่างมากต่อกระบวนการทางกายภาพในตัวเรียงกระแสเอง ลักษณะอุปนัยเกิดขึ้นเมื่อวงจรเรียงกระแสทำงานบนตัวกรอง โดยเริ่มจากตัวเหนี่ยวนำหรือบนขดลวดของรีเลย์ คอนแทค ขดลวดกระตุ้น เครื่องจักรไฟฟ้าและอื่น ๆ แผนภาพของวงจรเรียงกระแสที่ง่ายที่สุดพร้อมโหลดอุปนัยแสดงในรูปที่ 3.34 ในรูปแบบเหล่านี้ตามกฎเงื่อนไข >> เช่น ปฏิกิริยาอุปนัยเค้นที่ความถี่ระลอก ต้านทานมากขึ้นโหลด เป็นที่ทราบกันดีอยู่แล้วว่ากระแสในตัวเหนี่ยวนำล่าช้ากว่าแรงดัน π/2 และกระบวนการขึ้นและลงของกระแสจะสิ้นสุดลงภายในระยะเวลาหนึ่ง
รูปที่ 3.34 - วงจรเรียงกระแสแบบเฟสเดียวแบบปลายเดียวพร้อม
ลักษณะอุปนัยของโหลด
กระแสในวงจร (i 2) ไม่ใช่ไซน์เนื่องจากนอกเหนือจาก EMF ของขดลวดทุติยภูมิแล้ว EMF ของการเหนี่ยวนำของเค้นยังทำหน้าที่ในนั้น
ด้วยกระแสที่เพิ่มขึ้น พลังงานจะถูกสะสมในสนามแม่เหล็กของตัวเหนี่ยวนำ และเมื่อกระแสไฟลดลง พลังงานนี้จะถูกปล่อยออกมา
ดังนั้น ผลลัพธ์ของการเปิดตัวเหนี่ยวนำคือการ "ดึง" กระแสเกต มุมการไหลของกระแสขึ้นอยู่กับค่าคงที่ของเวลาโดยที่ R \u003d R H + r D + r 2, r D คือความต้านทานของไดโอด r 2 คือความต้านทานโอห์มมิกของขดลวดทุติยภูมิของหม้อแปลงไฟฟ้า (รูปที่ 3.35)
รูปที่ 3.35 - การพึ่งพามุมของกระแสกับค่าคงที่เวลา
เป็นการยากที่จะเติมเต็มอัตราส่วน การสูญเสียในตัวเหนี่ยวนำเพิ่มขึ้นและประสิทธิภาพโดยรวมลดลงอย่างมาก ดังนั้นด้วยลักษณะอุปนัยของโหลดจึงใช้วงจรหลายเฟส p ≥ 2 ซึ่งรับประกันความต่อเนื่องของกระแสได้อย่างง่ายดายในช่วงระยะเวลาการกระเพื่อม
ลองใช้วงจรเรียงกระแสแบบสามเฟสแบบสามเฟส (รูปที่ 3.36) ในรูปนี้ L S คือการเหนี่ยวนำการรั่วไหลของขดลวดทุติยภูมิ r คือความต้านทานการสูญเสีย (r = r 2 + r 1 / n 2) ซึ่งมักจะเป็น r<< Rн; – угол перекрытия фаз. Поскольку >> กระแสในโหลดคงที่ และกระแสผ่านวาล์วมีรูปพัลส์สี่เหลี่ยม การถ่ายโอนกระแสจากวาล์วไปยังวาล์วเนื่องจากการเหนี่ยวนำการรั่วไหลไม่สามารถเกิดขึ้นได้ในทันที EMF ของการเหนี่ยวนำตัวเองป้องกันการเปลี่ยนแปลงของกระแส - ในระยะหนึ่งจะลดลงและในอีกเฟสหนึ่งจะเพิ่มขึ้น ส่งผลให้กระแสไหลพร้อมกันในสองเฟส ปรากฏการณ์นี้เรียกว่าการทับซ้อนกันของกระแสเฟส มันส่งผลกระทบอย่างมีนัยสำคัญต่ออัตราส่วนเชิงคุณภาพและเชิงปริมาณในรูปแบบการแก้ไข
รูปที่ 3.36 - วงจรเรียงกระแสแบบปลายเดียวแบบสามเฟส
ในรอบเดียว วงจรเฟสเดียวไม่มีการถ่ายโอนกระแสจากวาล์วหนึ่งไปยังอีกวาล์วหนึ่ง ดังนั้น Ls ในนั้นจึงไม่ส่งผลกระทบต่อกระบวนการทางกายภาพ ที่ วงจรสามเฟสมีเวลาการเปลี่ยนแปลงที่แน่นอนของกระแส (การสลับเฟส) หากเราละเลยความต้านทานของวาล์วและหม้อแปลงไฟฟ้า ก็จะไม่มีการดึงกระแส - การสลับจะเกิดขึ้นทันที เนื่องจากการทับซ้อนกันของเฟสส่วนประกอบคงที่ U 0 จะลดลงตามพื้นที่ของรูปสามเหลี่ยมในแรงดัน U d .
เป็นผลให้การปรากฏตัวของ r และ Ls ทำให้ลักษณะภายนอกของวงจรเรียงกระแสลดลงอย่างรวดเร็ว (เช่นการเพิ่มขึ้นของ Rout) ซึ่งแสดงในรูปที่ 3.37
รูปที่ 3.37 - ลักษณะภายนอกของวงจรเรียงกระแสที่มีอุปนัย
ลักษณะของภาระ
ที่นี่เมื่อกระแสโหลดน้อยกว่าค่าที่แน่นอน I 0cr ความสัมพันธ์จะสิ้นสุดลง กระแสไฟเหนี่ยวนำจะขาดช่วง คายประจุจนหมดและแรงดันไฟเพิ่มขึ้น
สำหรับวงจรเรียงกระแสที่มีลักษณะอุปนัยของโหลด สามารถสรุปได้ดังต่อไปนี้:
1) องค์ประกอบอุปนัยของความต้านทานและโหลดต้องเทียบเท่ากับ Rn (มิฉะนั้นประสิทธิภาพจะต่ำ)
2) รูปร่างของส่วนโค้งปัจจุบันของวาล์วเข้าใกล้รูปสี่เหลี่ยมผืนผ้า
3) ระยะเวลาของแต่ละเฟสไม่ได้ขึ้นอยู่กับการเหนี่ยวนำในวงจรโหลด แต่จะพิจารณาจากจำนวนเฟสของการแก้ไข (พัลส์) และความเหนี่ยวนำการรั่วไหลของหม้อแปลงไฟฟ้า
4) การมีอยู่ของการเหนี่ยวนำการรั่วไหลนำไปสู่การทับซ้อนของกระแสเฟสในขณะที่ U 0 ลดลงและระลอกคลื่นที่อินพุตของตัวกรองการปรับให้เรียบจะเพิ่มขึ้น
ลักษณะตัวเก็บประจุของโหลด
ลักษณะตัวเก็บประจุของโหลดเกิดขึ้นเมื่อวงจรเรียงกระแสทำงานบนตัวกรองโดยเริ่มจากความจุดังแสดงในรูปที่ 3.38
ค่าคงที่ของวงจรประจุจะน้อยกว่าค่าคงที่ของวงจรคายประจุมาก ดังนั้นเวลาในการชาร์จ (มุม) จึงน้อยกว่าเวลาคายประจุตัวเก็บประจุตัวกรองไปยังโหลดมาก มีการตัดกระแสของวาล์ว เมื่อ R H เพิ่มขึ้น การคายประจุจะช้าลงและจุดตัดของ U 2 และ U C เปลี่ยนไป มุมจะลดลง และแรงดันไฟฟ้ากระเพื่อมก็ลดลงเช่นกัน ปัจจุบัน
รูปที่ 3.38 - วงจรเรียงกระแสที่ง่ายที่สุดพร้อมโหลด capacitive
โหลดเท่ากับศูนย์ตัวเก็บประจุจะไม่ถูกปล่อยออกมาและ U 0 \u003d U m 2 แรงดันย้อนกลับทั่วทั้งวาล์วมีค่าสูงสุดและเท่ากับ ลักษณะภายนอกเป็นแบบไม่เป็นเชิงเส้น และสามารถกำหนดอิมพีแดนซ์เอาต์พุตที่จุดการทำงานโดยเพิ่มขึ้นทีละส่วนเท่านั้น (รูปที่ 3.39)
รูปที่ 3.39 - ลักษณะภายนอกของวงจรเรียงกระแสที่มีตัวเก็บประจุ
โหลด
วงจรการแก้ไขแบบปลายเดียวแบบเฟสเดียวมีการกระเพื่อมค่อนข้างสูงที่ความถี่พื้นฐานต่ำและใช้งานหม้อแปลงได้ไม่ดี อย่างไรก็ตาม ความเรียบง่ายของวงจรแบบรอบเดียวทำให้น่าสนใจกว่าวงจรแบบผลักดึงเพื่อให้ได้ไฟฟ้าแรงสูง
พิจารณาวงจรเพิ่มแรงดันไฟเป็นสองเท่า จะแสดงในรูปที่ 3.40 และประกอบด้วยวงจรเรียงกระแสแบบวงจรเดียวสองตัว ซึ่งแต่ละตัวใช้ของตัวเอง
รูปที่ 3.40 - วงจรแรงดันไฟฟ้าสองเท่า (สมมาตร)
ครึ่งคลื่นของแรงดันไฟหลัก แรงดันไฟบนโหลดคือผลรวมของแรงดันไฟบนตัวเก็บประจุ C 1 และ C 2 หากระลอกคลื่นมีขนาดเล็ก แสดงว่าส่วนประกอบคงที่บนโหลด
เมื่อเพิ่ม ฮาร์โมนิกคี่ทั้งหมดจะได้รับการชดเชย รวมทั้งอันแรก (p = 2) ข้อเสียของวงจรคือการขาดจุดร่วมระหว่างหม้อแปลงกับโหลด ซึ่งไม่สะดวกในแง่ของความปลอดภัยทางไฟฟ้า
รูปแบบการเสแสร้งอีกรูปแบบหนึ่งแสดงในรูปที่ 3.41 เรียกว่าอสมมาตรและมี จุดร่วมเครือข่ายและโหลด
รูปที่ 3.41 - วงจรแรงดันไฟฟ้าสองเท่าไม่สมดุล
ในวงจรนี้ ความถี่ของฮาร์มอนิกแรกของระลอกคลื่นเท่ากับความถี่ไฟหลัก ตัวเก็บประจุ C 1 ทำหน้าที่ของอุปกรณ์กักเก็บพลังงานระดับกลาง ดังนั้นมวลและปริมาตรของตัวคูณแบบอสมมาตรจะมากกว่าแบบสมมาตร
แต่เราได้โครงสร้างปกติที่สามารถเพิ่มได้ดังแสดงในรูปที่ 3.42
รูปที่ 3.42 - วงจรแรงดันไฟฟ้าสองเท่าแบบอสมมาตร (a) และ
ตัวคูณแรงดันไฟฟ้าด้วยหก (b)
ในตัวคูณแรงดันไฟฟ้า โหลดยังสามารถเชื่อมต่อกับกลุ่มตัวเก็บประจุด้านบน - เราได้ตัวคูณด้วยห้า ตัวคูณถูกผลิตขึ้นในรูปแบบของบล็อกที่ไม่สามารถแยกออกได้ จำนวนตัวเก็บประจุเท่ากับปัจจัยการคูณ อิมพีแดนซ์เอาต์พุตมีหน่วยวัดเป็นกิโลโอห์ม
วงจรเรียงกระแสควบคุม
วงจรเรียงกระแสแบบควบคุมคือวงจรเรียงกระแสที่แรงดันเอาต์พุตสามารถควบคุมได้ที่แรงดันไฟขาเข้าคงที่
คุณสามารถควบคุมแรงดันไฟขาออกได้โดยการเปลี่ยนรอบของไฟหลักหรือ ขดลวดทุติยภูมิหม้อแปลงไฟฟ้าห้องปฏิบัติการ autotransformer (LATR) หรือการนำลิโน่เข้าสู่วงจรกระแส วิธีแรกให้การปรับที่ไม่ต่อเนื่องกันซึ่งไม่เป็นที่ยอมรับเสมอไป วิธีที่สองเนื่องจากมีหน้าสัมผัสแบบเลื่อนมีความน่าเชื่อถือต่ำและวิธีที่สาม (โดยใช้ลิโน่) มีประสิทธิภาพต่ำ ดังนั้นจึงใช้วาล์วควบคุมซึ่งรวมอยู่แทนวาล์วที่ไม่มีการควบคุมในวงจรการแก้ไข
ไทริสเตอร์ใช้เป็นวาล์วดังกล่าว - สี่ชั้น โครงสร้าง p-n-p-n. รูปที่ 3.43a,b,c แสดงสัญลักษณ์ วงจรสมมูล และ CVC ของไทริสเตอร์ (triac) ตามลำดับ :
รูปที่ 3.43 - สัญลักษณ์ วงจรสมมูลและ CVC ของไทริสเตอร์
ในสภาวะปกติ ไทริสเตอร์จะถูกล็อค มีสถานะเสถียรสองสถานะในวงจร: เปิด (จุด A) และปิด (จุด B)
การเพิ่มแรงดันไฟต้นทางจาก 0 เป็น E ที่ Iue = 0 ทำให้เกิดการเคลื่อนที่ของจุดปฏิบัติการตามส่วนล่างของคุณลักษณะ หากคุณใช้การควบคุมพัลส์ปัจจุบัน Iue เพียงพอที่จะเปิด จากนั้น rt จะไปยังจุด A และวงจรควบคุมจะหยุดส่งอิทธิพลต่อกระบวนการในวงจรแอโนดของไทริสเตอร์ - ไม่จำเป็นต้องใช้วงจรควบคุม นี่คือระบบที่มีการตอบรับเชิงบวกจากภายใน ดังนั้นไทริสเตอร์จึงมีกำลังรับสูง
โดยปกติ E จะน้อยกว่าแรงดันเปิด "ตามขั้วบวก" (U amax) เสมอ 20 ... 30% คุณสามารถปิดไทริสเตอร์ได้โดยการลด Ia ให้เหลือระดับที่น้อยกว่ากระแสถือ (Iud) โดยเพิ่ม Rn หรือลด E
ในสถานะเปิด ไทริสเตอร์จะส่งกระแสน้ำขนาดใหญ่ (หลายร้อยแอมแปร์) แต่พวกมันเฉื่อย เวลาเปิดเครื่องคือ 0.1 ... 10 μs และเวลาเปิดปิดคือ 1 ... 100 μs
นอกจากไทริสเตอร์ที่พิจารณาแล้ว ยังมีกลุ่มอุปกรณ์สี่ชั้นที่มีคุณสมบัติหลากหลาย ได้แก่ ไดนามิก ไทริแอก และไทริสเตอร์ที่ล็อคได้ พวกเขาจะแสดงในรูปที่ 3.44.
รูปที่ 3.44 - ไดนามิกสัญลักษณ์ (a), triac (b)
และไทริสเตอร์ที่ล็อคได้ (c)
ไดนามิกมีแรงดันไฟฟ้าเปิดที่มีการควบคุมข้ามขั้วบวก นี่คืออุปกรณ์สองขั้ว Triac ออกแบบมาเพื่อทำงานในวงจร กระแสสลับในกรณีนี้ สามารถใช้สัญญาณควบคุมสัมพันธ์กับแคโทดหรือสัมพันธ์กับแอโนด อุปกรณ์ทั้งหมดที่กล่าวถึงข้างต้นจะถูกปิดโดยการลดกระแสแอโนดให้ต่ำกว่ากระแสที่ถืออยู่เท่านั้น
อย่างไรก็ตามยังมีไทริสเตอร์ที่ล็อคได้ที่เรียกว่าเช่น โดยการใช้กระแสกับวงจร RE ในทิศทางตรงกันข้าม thyristor สามารถปิดได้ แต่ในขณะเดียวกัน อัตราขยายจากการเปิดปิดก็มีลำดับความสำคัญต่ำกว่าอัตราขยายเมื่อเปิดเครื่อง
อุปกรณ์เหล่านี้ใช้กันอย่างแพร่หลายในอุปกรณ์อัตโนมัติและอุปกรณ์จ่ายไฟ เช่น ตัวควบคุม ความคงตัว และอุปกรณ์ป้องกัน
โดยปกติไทริสเตอร์จะอยู่ในวงจรการแก้ไขแทนวาล์วที่ไม่มีการควบคุม ลองใช้สะพานเฟสเดียว (รูปที่ 3.45) ในรูปนี้ - มุมการเปลี่ยนไทริสเตอร์ (มุมที่สัมพันธ์กับจุดเปลี่ยนตามธรรมชาติของวาล์วที่ไม่มีการควบคุม)
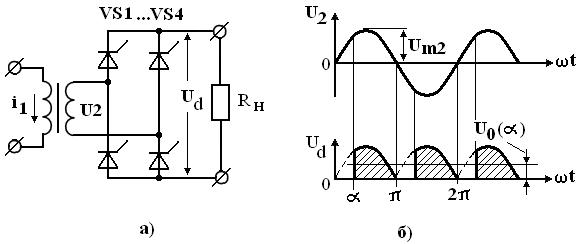
รูปที่ 3.45 - สะพานควบคุมแบบเฟสเดียว
ค้นหาส่วนประกอบคงที่ของแรงดันไฟฟ้าข้ามโหลด
เมื่อพิจารณาว่าแรงดันไฟฟ้า U 2 เป็นฮาร์มอนิกแล้ว
(3.44) หากใน (3.44) เรายอมรับ นั่นคือแรงดันไฟฟ้าที่เอาต์พุตของวงจรเรียงกระแสที่ไม่มีการควบคุม ถ้า แล้ว . การพึ่งพาอาศัยกันเป็นลักษณะการควบคุมของวงจรเรียงกระแสที่ควบคุม แสดงในรูปที่ 3.46 และไม่เป็นเชิงเส้น

รูปที่ 3.49 - วงจรเรียงกระแสควบคุมที่ไม่สมดุล
ที่นี่ไดโอดมีบทบาทเป็นประตูศูนย์ดังนั้น ความไม่สมดุลสามารถเป็นอะไรก็ได้ (วาล์วที่ไม่มีการควบคุมสามารถอยู่ในกลุ่มแอโนดหรือแคโทดหรือดังในรูปที่ 3.49)
ไทริสเตอร์ยังใช้ในวงจรบูสเตอร์ ซึ่งเมื่อเทียบกับที่พิจารณาแล้ว มีประสิทธิภาพที่สูงกว่า เนื่องจากพวกมันแปลงพลังงานเพียงบางส่วนสำหรับโหลด วงจรเรียงกระแสที่มีการเพิ่มแรงดันไฟฟ้าแสดงในรูปที่ 3.50 นี่คือแรงดันขาออกขั้นต่ำ
รูปที่ 3.50 - วงจรเรียงกระแสพร้อมบูสต์แรงดัน
จัดทำโดยวงจรเรียงกระแส VD1 และ VD2 ที่ไม่มีการควบคุม การเพิ่มแรงดันไฟฟ้าทำได้โดยการเปิดไทริสเตอร์ VS1 และ VS2 ในโหมดสูงสุด ไดโอดจะปิดเสมอและมุมสวิตชิ่งคือ . วงจรดังกล่าวมีประสิทธิภาพด้านพลังงานที่ดี แต่จำเป็นต้องมีขดลวดเพิ่มเติมในหม้อแปลงไฟฟ้า
เราแนะนำให้คุณอ่าน
 ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น
ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่
การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่ การวินิจฉัยการรักษาการรักษา urogenital chlamydia") Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia
Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร
ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร

