อัลกอริธึมตัวควบคุม PID แบบแยกส่วนอย่างง่าย
รองรับไมโครคอนโทรลเลอร์ AVR ทั้งหมด
ฟังก์ชัน PID ใช้หน่วยความจำแฟลช 534 ไบต์และรอบโปรเซสเซอร์ 877 รอบ (IAR - การเพิ่มประสิทธิภาพขนาดต่ำ)
1. บทนำ
คู่มือนี้อธิบายการใช้งานอย่างง่ายของคอนโทรลเลอร์แบบแยกส่วน-อินทิกรัล-อนุพันธ์ (PID)
เมื่อทำงานกับแอพพลิเคชั่นที่สัญญาณเอาท์พุตของระบบต้องเปลี่ยนตามค่าอ้างอิง จำเป็นต้องใช้อัลกอริธึมการควบคุม ตัวอย่างของการใช้งานดังกล่าว ได้แก่ หน่วยควบคุมเครื่องยนต์ หน่วยควบคุมสำหรับอุณหภูมิ ความดัน การไหลของของเหลว ความเร็ว แรง หรือตัวแปรอื่นๆ สามารถใช้ตัวควบคุม PID เพื่อควบคุมตัวแปรที่วัดได้
มีการใช้โซลูชันมากมายในด้านการควบคุมมาเป็นเวลานาน แต่ตัวควบคุม PID สามารถกลายเป็น "มาตรฐานอุตสาหกรรม" ได้เนื่องจากความเรียบง่ายและประสิทธิภาพที่ดี
เพื่อรับ ข้อมูลเพิ่มเติมสำหรับตัวควบคุม PID และแอปพลิเคชัน ผู้อ่านควรอ้างอิงถึงแหล่งอื่น เช่น PID Controllers โดย K.J. Astrom & T. Hagglund (1995)
รูปที่ 1-1.การตอบสนองโดยทั่วไปของตัวควบคุม PID ต่อการเปลี่ยนแปลงขั้นตอนในสัญญาณอ้างอิง
2. ตัวควบคุม PID
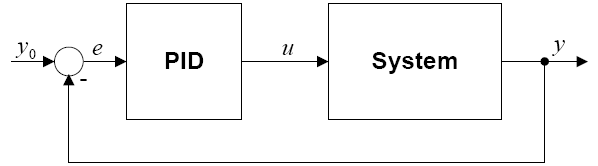
รูปที่ 2-1 แสดงไดอะแกรมของระบบที่มีตัวควบคุม PID ตัวควบคุม PID จะเปรียบเทียบค่ากระบวนการที่วัดได้ Y กับค่าอ้างอิงที่กำหนด Y0 ความแตกต่างหรือข้อผิดพลาด E จะถูกประมวลผลเพื่อคำนวณกระบวนการป้อนข้อมูลใหม่ U กระบวนการป้อนข้อมูลใหม่นี้จะพยายามทำให้ค่าของกระบวนการที่วัดได้ใกล้เคียงกับค่าที่ระบุมากขึ้น
อีกทางเลือกหนึ่งสำหรับระบบควบคุมแบบวงปิดคือระบบควบคุมแบบวงเปิด ลูปการควบคุมแบบเปิด (โดยไม่มีการป้อนกลับ) นั้นไม่น่าพอใจในหลายกรณี และการใช้งานมักจะเป็นไปไม่ได้เนื่องจากคุณสมบัติของระบบ
รูปที่ 2-1ระบบควบคุมวงปิด PID
ไม่เหมือนกับอัลกอริธึมการควบคุมทั่วไป คอนโทรลเลอร์ PID สามารถควบคุมกระบวนการตามประวัติและอัตราการเปลี่ยนแปลงได้ วิธีนี้ทำให้วิธีการควบคุมที่แม่นยำและเสถียรยิ่งขึ้น
แนวคิดหลักคือตัวควบคุมได้รับข้อมูลเกี่ยวกับสถานะของระบบโดยใช้เซ็นเซอร์ จากนั้นจะลบค่าที่วัดได้ออกจากค่าอ้างอิงเพื่อคำนวณข้อผิดพลาด ข้อผิดพลาดจะได้รับการจัดการในสามวิธี: จัดการกับเวลาปัจจุบันด้วยพจน์ที่เป็นสัดส่วน ย้อนกลับไปในอดีตโดยใช้คำที่เป็นปริพันธ์ และคาดการณ์อนาคตโดยใช้พจน์ส่วนต่าง
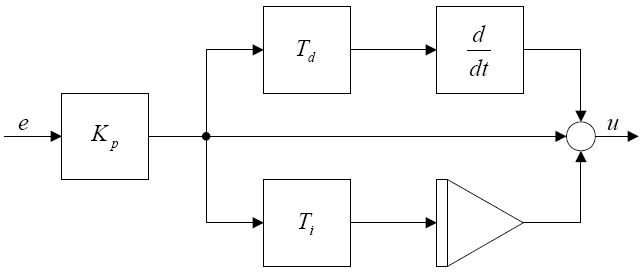
รูปที่ 2-2 แสดงแผนภาพวงจรของตัวควบคุม PID โดยที่ Tp, Ti และ Td เป็นค่าคงที่เวลาตามสัดส่วน ปริพันธ์ และอนุพันธ์ตามลำดับ
รูปที่ 2-2แผนภาพตัวควบคุม PID
2.1 สัดส่วน
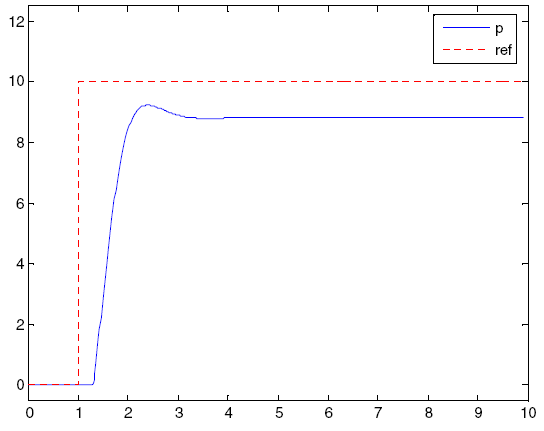
ระยะตามสัดส่วน (P) ให้สัญญาณควบคุมตามสัดส่วนกับข้อผิดพลาดที่คำนวณได้ การใช้การควบคุมตามสัดส่วนเพียงตัวควบคุมเดียวทำให้เกิดข้อผิดพลาดคงที่ ยกเว้นเมื่อสัญญาณควบคุมเป็นศูนย์และค่าของกระบวนการของระบบจะเท่ากับค่าที่ต้องการ ในรูป 2-3 ข้อผิดพลาดคงที่ในค่าของกระบวนการของระบบปรากฏขึ้นหลังจากการเปลี่ยนแปลงในสัญญาณอ้างอิง (อ้างอิง) การใช้ P-term มากเกินไปจะทำให้ระบบไม่เสถียรรูปที่ 2-3 P controller ตอบสนองต่อการเปลี่ยนแปลงขั้นตอนในสัญญาณอ้างอิง
2.2 เทอมปริพันธ์
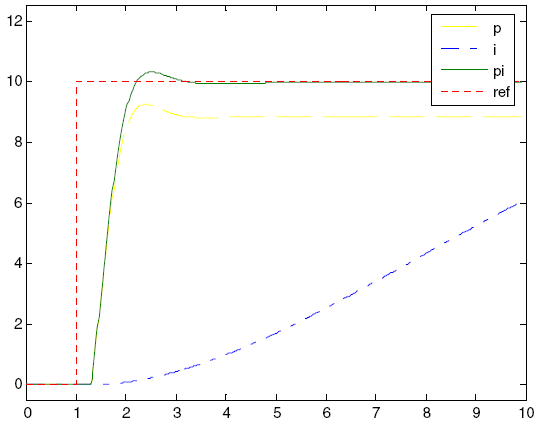
ส่วนประกอบสำคัญ (I) แสดงถึงข้อผิดพลาดก่อนหน้านี้ ผลรวมของข้อผิดพลาดจะดำเนินต่อไปจนกว่าค่าของกระบวนการของระบบจะเท่ากับค่าที่ต้องการ โดยปกติ ส่วนประกอบสำคัญจะใช้ร่วมกับส่วนประกอบตามสัดส่วน ในตัวควบคุม PI ที่เรียกว่า การใช้เฉพาะองค์ประกอบที่ครบถ้วนจะให้การตอบสนองที่ช้าและมักจะเป็นระบบสั่น รูปที่ 2-4 แสดงการตอบสนองขั้นตอนของตัวควบคุม I และ PI อย่างที่คุณเห็น การตอบสนองของคอนโทรลเลอร์ PI ไม่มีข้อผิดพลาดคงที่ และการตอบสนองของคอนโทรลเลอร์ I นั้นช้ามาก
รูปที่ 2-4การตอบสนองของตัวควบคุม I- และ PI ต่อการเปลี่ยนแปลงขั้นตอนในค่าควบคุม
2.3 เงื่อนไขอนุพันธ์
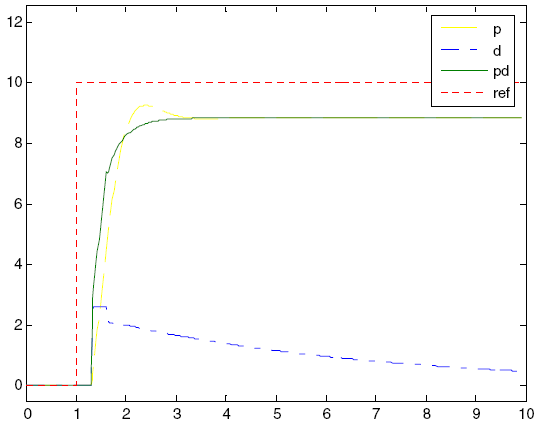
เงื่อนไขส่วนต่าง (D) คืออัตราการเปลี่ยนแปลงของข้อผิดพลาด การเพิ่มองค์ประกอบนี้ช่วยปรับปรุงการตอบสนองของระบบต่อการเปลี่ยนแปลงสถานะอย่างกะทันหัน ค่าดิฟเฟอเรนเชียล D มักใช้กับอัลกอริธึม P หรือ PI เช่น ตัวควบคุม PD หรือ PID ส่วนประกอบดิฟเฟอเรนเชียลขนาดใหญ่ D มักจะทำให้ระบบไม่เสถียร รูปที่ 2-5 แสดงการตอบสนองของตัวควบคุม D และ PD การตอบสนองของตัวควบคุม PD ช่วยเพิ่มมูลค่ากระบวนการได้เร็วกว่าตัวควบคุม P โปรดทราบว่าคำที่แตกต่างกัน D ทำงานโดยพื้นฐานแล้วเหมือนกับตัวกรองความถี่สูงผ่านสำหรับสัญญาณผิดพลาด และทำให้ระบบไม่เสถียรและไวต่อสัญญาณรบกวนมากขึ้น
รูปที่ 2-5การตอบสนองของตัวควบคุม D- และ PD ต่อการเปลี่ยนแปลงขั้นตอนในสัญญาณอ้างอิง
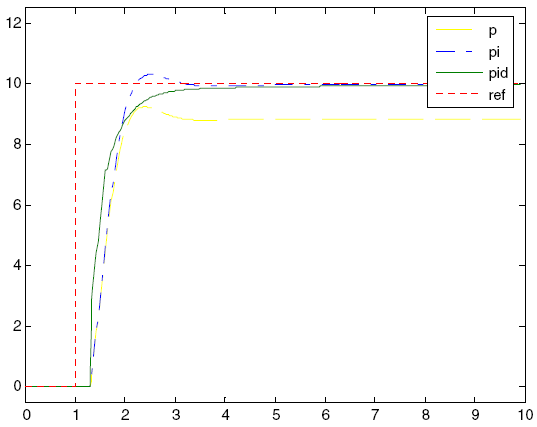
ตัวควบคุม PID ให้ประสิทธิภาพที่ดีที่สุดเพราะใช้ส่วนประกอบทั้งหมดร่วมกัน รูปที่ 2-6 เปรียบเทียบตัวควบคุม P, PI และ PID PI ปรับปรุง P โดยลบข้อผิดพลาดที่อยู่กับที่ และ PID ปรับปรุง PI ด้วยการตอบสนองที่เร็วขึ้น
รูปที่ 2-6ตัวควบคุม P-, PI- และ PID ตอบสนองต่อการเปลี่ยนแปลงขั้นตอนในสัญญาณอ้างอิง
2.4. การตั้งค่า
วิธีที่ดีที่สุดในการค้นหาพารามิเตอร์ที่จำเป็นของอัลกอริทึม PID คือการใช้แบบจำลองทางคณิตศาสตร์ของระบบ อย่างไรก็ตาม มักไม่มีคำอธิบายทางคณิตศาสตร์โดยละเอียดของระบบ และการตั้งค่าพารามิเตอร์ตัวควบคุม PID สามารถทำได้โดยการทดลองเท่านั้น การค้นหาพารามิเตอร์สำหรับตัวควบคุม PID อาจเป็นงานที่น่ากลัว ที่นี่ สำคัญมากมีข้อมูลเกี่ยวกับคุณสมบัติของระบบและ เงื่อนไขต่างๆงานของเธอ. โปรเซสบางโปรเซสไม่ควรยอมให้ตัวแปรโปรเซสโอเวอร์โอเวอร์จากเซ็ตพอยต์ กระบวนการอื่นๆ ควรลดการใช้พลังงานลง ข้อกำหนดที่สำคัญที่สุดก็คือความมั่นคง กระบวนการไม่ควรผันผวนในทุกกรณี นอกจากนี้ เสถียรภาพจะต้องเกิดขึ้นภายในระยะเวลาหนึ่ง
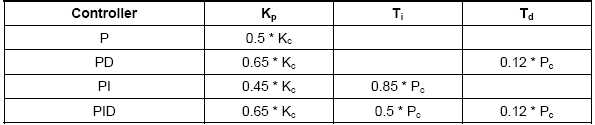
มีวิธีการบางอย่างในการปรับแต่งคอนโทรลเลอร์ PID ทางเลือกของวิธีการจะขึ้นอยู่กับว่ากระบวนการสามารถออฟไลน์สำหรับการปรับแต่งหรือไม่ วิธี Ziegler-Nichols เป็นวิธีการปรับจูนที่ไม่ใช่แบบออฟไลน์ที่รู้จักกันดี ขั้นตอนแรกในวิธีนี้คือตั้งค่าเกน I และ D ให้เป็นศูนย์ เพิ่มเกน P ให้อยู่ในความผันผวนที่คงที่และเสถียร (ใกล้เคียงที่สุด) จากนั้นจะบันทึกค่าเกนที่สำคัญ Kc และช่วงเวลาการแกว่ง Pc และค่า P, I และ D ได้รับการแก้ไขโดยใช้ตารางที่ 2-1
ตารางที่ 2-1.การคำนวณพารามิเตอร์ตามวิธี Ziegler-Nichols
การปรับพารามิเตอร์เพิ่มเติมมักจะจำเป็นเพื่อเพิ่มประสิทธิภาพการทำงานของคอนโทรลเลอร์ PID ผู้อ่านควรทราบว่ามีระบบที่ตัวควบคุม PID จะไม่ทำงาน สิ่งเหล่านี้อาจเป็นระบบที่ไม่ใช่เชิงเส้น แต่โดยทั่วไป ปัญหามักเกิดขึ้นกับการควบคุม PID เมื่อระบบไม่เสถียรและผลของสัญญาณอินพุตขึ้นอยู่กับสถานะของระบบ
2.5. ตัวควบคุม PID แบบแยกส่วน
ตัวควบคุม PID แบบแยกส่วนจะอ่านข้อผิดพลาด คำนวณ และส่งสัญญาณควบคุมสำหรับเวลาสุ่มตัวอย่าง T เวลาในการสุ่มตัวอย่างต้องน้อยกว่าค่าคงที่ของเวลาที่เล็กที่สุดในระบบ
2.5.1. คำอธิบายของอัลกอริทึม
ตัวควบคุม PID ต่างจากอัลกอริธึมการควบคุมทั่วไปที่สามารถจัดการสัญญาณควบคุมตามประวัติและอัตราการเปลี่ยนแปลงของสัญญาณที่วัดได้ วิธีนี้ทำให้วิธีการควบคุมที่แม่นยำและเสถียรยิ่งขึ้น
รูปที่ 2-2 แสดงการออกแบบวงจรของตัวควบคุม PID โดยที่ Tp, Ti และ Td เป็นค่าคงที่เวลาตามสัดส่วน ปริพันธ์ และอนุพันธ์ตามลำดับ
ฟังก์ชั่นการถ่ายโอนของระบบที่แสดงในรูปที่ 2-2 คือ:
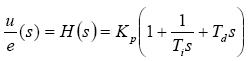
เราประมาณส่วนประกอบอินทิกรัลและดิฟเฟอเรนเชียลเพื่อให้ได้รูปแบบที่ไม่ต่อเนื่อง
เพื่อหลีกเลี่ยงการเปลี่ยนแปลงนี้ในค่ากระบวนการอ้างอิงทำให้การเปลี่ยนแปลงอย่างรวดเร็วที่ไม่ต้องการบนอินพุตควบคุม ตัวควบคุมจะปรับปรุงตามคำที่ได้รับจากค่ากระบวนการเท่านั้น:
3. การนำตัวควบคุม PID ไปใช้ใน C
เอกสารนี้แนบแอปพลิเคชัน C ที่ใช้งานได้ คำอธิบายแบบเต็มของซอร์สโค้ดและข้อมูลการคอมไพล์สามารถพบได้ในไฟล์ "readme.html"
รูปที่ 3-1ผังงานแอปพลิเคชันสาธิต
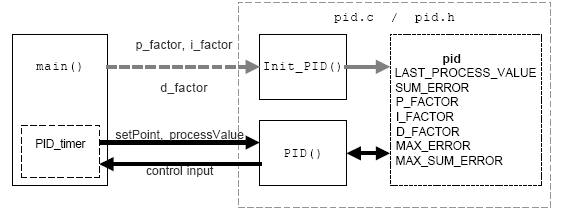
รูปที่ 3-1 แสดงไดอะแกรมแบบง่ายของแอปพลิเคชันสาธิต
ตัวควบคุม PID ใช้โครงสร้างเพื่อจัดเก็บสถานะและพารามิเตอร์ โครงสร้างนี้เริ่มต้นโดยฟังก์ชันหลัก และมีเพียงตัวชี้ที่ส่งไปยังฟังก์ชัน Init_PID() และ PID()
ต้องเรียกใช้ฟังก์ชัน PID() สำหรับทุกช่วงเวลา T ซึ่งกำหนดโดยตัวจับเวลาที่ตั้งค่าสถานะ PID_timer เมื่อเวลาตัวอย่างผ่านไป เมื่อตั้งค่าสถานะ PID_timer โปรแกรมหลักจะอ่านค่าอ้างอิงกระบวนการและค่าระบบของกระบวนการ เรียกใช้ฟังก์ชัน PID() และส่งออกผลลัพธ์ไปยังอินพุตควบคุม
เพื่อเพิ่มความแม่นยำ p_factor, i_factor และ d_factor จะเพิ่มขึ้น 128 เท่า ผลลัพธ์ของอัลกอริทึม PID จะลดลงในภายหลังโดยหารด้วย 128 ค่า 128 ใช้เพื่อจัดเตรียมการเพิ่มประสิทธิภาพการรวบรวม
![]()
นอกจากนี้ อิทธิพลของ Ifactor และ Dfactor จะขึ้นอยู่กับเวลา T.
3.1. ไขลานอินทิกรัล
เมื่อกระบวนการป้อนข้อมูล U ถึงค่าที่สูงพอ มันจะกลายเป็นขอบเขต ไม่ว่าจะโดยช่วงตัวเลขภายในของคอนโทรลเลอร์ PID หรือโดยช่วงเอาต์พุตของคอนโทรลเลอร์ หรือถูกระงับในแอมพลิฟายเออร์ สิ่งนี้จะเกิดขึ้นหากมีความแตกต่างมากพอระหว่างค่าที่วัดได้กับค่าอ้างอิง โดยปกติเนื่องจากกระบวนการมีการรบกวนมากกว่าที่ระบบสามารถจัดการได้
หากผู้ควบคุมใช้คำศัพท์เฉพาะ สถานการณ์นี้อาจสร้างปัญหาได้ ในสถานการณ์เช่นนี้ ระยะอินทิกรัลจะเพิ่มขึ้นอย่างต่อเนื่อง แต่หากไม่มีการละเมิดครั้งใหญ่ ผู้ควบคุม PID จะเริ่มชดเชยกระบวนการจนกว่าผลรวมของอินทิกรัลจะกลับคืนสู่สภาวะปกติ
ปัญหานี้สามารถแก้ไขได้หลายวิธี ในตัวอย่างนี้ ผลรวมปริพันธ์สูงสุดจะถูกจำกัดและต้องไม่เกิน MAX_I_TERM ขนาดที่ถูกต้อง MAX_I_TERM จะขึ้นอยู่กับระบบ
4. การพัฒนาเพิ่มเติม
ตัวควบคุม PID ที่นำเสนอในที่นี้เป็นตัวอย่างที่เข้าใจง่าย ตัวควบคุมควรทำงานได้ดี แต่แอปพลิเคชันบางอย่างอาจต้องการให้ตัวควบคุมมีความน่าเชื่อถือมากยิ่งขึ้น อาจจำเป็นต้องเพิ่มการแก้ไขความอิ่มตัวในพจน์ปริพันธ์ โดยยึดตามเงื่อนไขตามสัดส่วนของค่ากระบวนการเท่านั้น
ในการคำนวณ Ifactor และ Dfactor เวลาสุ่มตัวอย่าง T เป็นส่วนหนึ่งของสมการ หากเวลาสุ่มตัวอย่าง T ที่ใช้น้อยกว่าหรือมากกว่า 1 วินาทีมาก ความแม่นยำของ Ifactor หรือ Dfactor จะไม่เพียงพอ เป็นไปได้ที่จะเขียน PID และอัลกอริธึมการปรับขนาดใหม่เพื่อรักษาความถูกต้องของเงื่อนไขอินทิกรัลและดิฟเฟอเรนเชียล
5. วรรณกรรมอ้างอิง
K.J. Astrom & T. Hagglund, 1995: PID Controllers: ทฤษฎี การออกแบบ และการปรับแต่ง
สมาคมระหว่างประเทศเพื่อการวัดและเปรียบเทียบ
6. ไฟล์
AVR221.rarแปลโดย Kirill Vladimirov ตามคำขอ
บรรยาย 30การใช้งานตัวควบคุม PID และการกรองแบบดิจิตอลในตัวควบคุม
ตัวควบคุมไมโครโปรเซสเซอร์ทำให้สามารถใช้คอนโทรลเลอร์ทั้งแบบแยกและอนาล็อกได้ เช่นเดียวกับตัวควบคุมแบบไม่เชิงเส้นและแบบปรับเองได้ ปัญหาหลักของการควบคุมแบบดิจิทัลคือการหาโครงสร้างที่เหมาะสมของตัวควบคุมและพารามิเตอร์ต่างๆ การใช้ซอฟต์แวร์ของอัลกอริธึมการควบคุมสำหรับพารามิเตอร์เหล่านี้มักจะเป็นงานที่ค่อนข้างง่าย
หน่วยงานกำกับดูแลแต่ละแห่งจะต้องรวมถึงการป้องกันด้วยวิธีการป้องกันการพัฒนาที่เป็นอันตรายของกระบวนการภายใต้การกระทำของผู้ควบคุมในสถานการณ์ฉุกเฉิน
TP จำนวนมากมีลักษณะเฉพาะด้วยพารามิเตอร์อินพุตและเอาต์พุตหลายตัว บ่อยครั้งการเชื่อมต่อภายในและการโต้ตอบของสัญญาณที่เกี่ยวข้องนั้นไม่สำคัญ และสามารถควบคุมกระบวนการได้ด้วยชุดของตัวควบคุมอย่างง่าย โดยแต่ละลูปจะถูกใช้ในระบบควบคุมแบบดิจิตอลโดยตรง
ตัวควบคุมเชิงเส้นที่มีอินพุต/เอาต์พุตเดียวสามารถแสดงในรูปแบบทั่วไปได้
ที่ไหน ยูคือเอาต์พุตคอนโทรลเลอร์ (ตัวแปรควบคุม) ยู กับคือค่าที่ตั้งไว้ และ ที่– สัญญาณเอาต์พุตของกระบวนการ (ตัวแปรควบคุม) พารามิเตอร์ พีหมายถึงคำสั่งของผู้ควบคุม
ตัวควบคุม PID ธรรมดาถือได้ว่าเป็นกรณีพิเศษของตัวควบคุมแบบไม่ต่อเนื่องทั่วไปด้วย พี= 2.
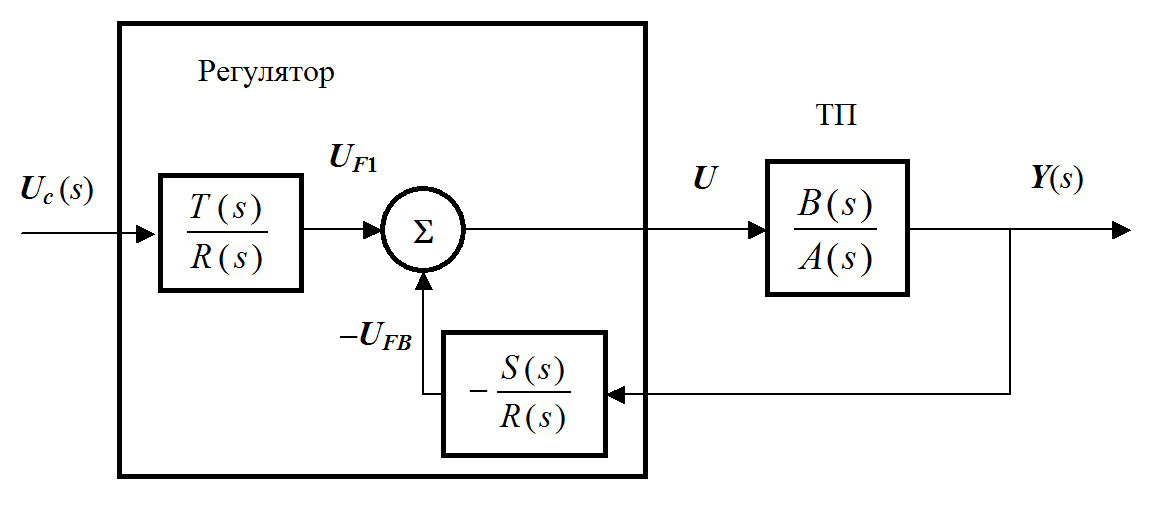
พิจารณาตัวควบคุมที่ประกอบด้วยสองส่วน: วงจรป้อนกลับ (คำติชม) G Facebook (ส) ที่จัดการข้อผิดพลาด อี , และวงป้อนกลับ G FF (ส) ซึ่งควบคุมการเปลี่ยนแปลงในการตั้งค่าและเพิ่มระยะการแก้ไขให้กับสัญญาณควบคุมเพื่อให้ระบบตอบสนองต่อการเปลี่ยนแปลงการตั้งค่าได้รวดเร็วยิ่งขึ้น สำหรับตัวควบคุมนี้ การดำเนินการควบคุม ยู (ส ) คือผลรวมของสองสัญญาณ
นิพจน์นี้สามารถเขียนใหม่เป็น
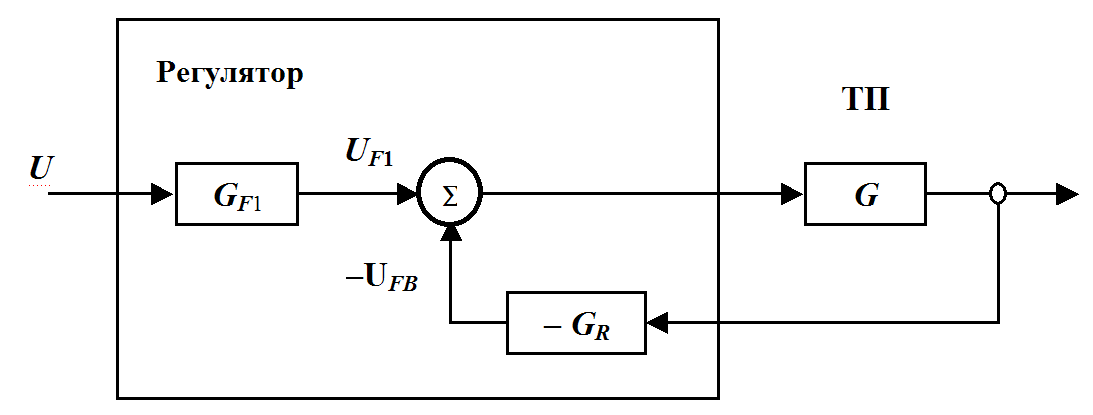
ที่ไหน ยู F 1 (ส) เป็นสัญญาณจองล่วงหน้าตามค่าอ้างอิง (การตั้งค่าการดำเนินการ) a ยู F 2 (ส) เป็นสัญญาณตอบรับ
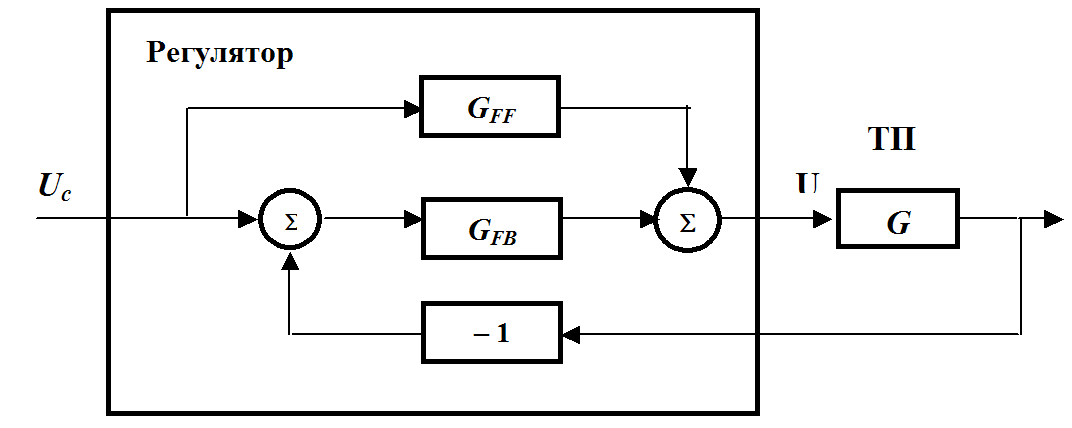
รูปที่ 3.0.1คอนโทรลเลอร์ที่มีลูปการควบคุม feedforward ตามค่าอ้างอิง (setpoint) และลูปป้อนกลับตามผลลัพธ์ของกระบวนการเอ
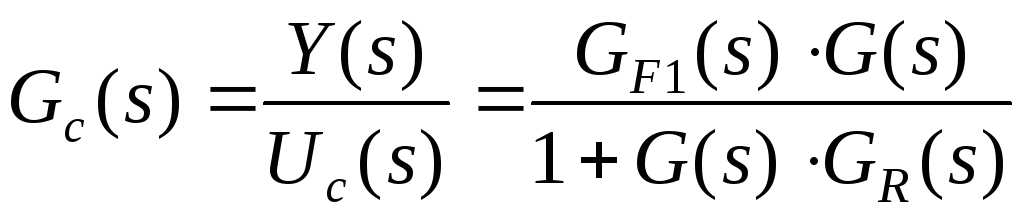
คอนโทรลเลอร์มีสัญญาณอินพุตสองตัว ยู ค (ส) และ Y(ส) และดังนั้นจึงสามารถอธิบายได้ด้วยสองฟังก์ชันการถ่ายโอน G F 1 (ส) และ G R (ส).
|
|
เนื่องจากคอนโทรลเลอร์ที่มี PF (30.3) มีสาเหตุมาจาก G F 1 (ส) ค่าสัมประสิทธิ์ที่ปรับได้มากกว่าตัวควบคุมทั่วไป จากนั้นระบบควบคุมแบบปิดจะมีลักษณะที่ดีกว่า
ตำแหน่งของเสาของระบบป้อนกลับสามารถเปลี่ยนได้โดยใช้ตัวควบคุม G R (ส) และตัวควบคุมการป้อนกลับ G F 1 (ส) เพิ่มศูนย์ใหม่ให้กับระบบ ดังนั้นระบบควบคุมสามารถตอบสนองต่อการเปลี่ยนแปลงของสัญญาณงานได้อย่างรวดเร็วถ้า G F 1 (ส) ถูกเลือกอย่างถูกต้อง
รูปที่ 3.0.2 โครงสร้างของตัวควบคุมเชิงเส้นพร้อมการควบคุมและป้อนกลับ
ด้วยการใช้ตัวควบคุมดังกล่าว จึงเป็นไปได้ที่จะสร้างระบบควบคุมที่มีความแม่นยำสูง (เซอร์โว) โดยใช้ไดรฟ์ไฟฟ้า หุ่นยนต์ หรือเครื่องมือกล สำหรับพวกเขา การตอบสนองต่อผลลัพธ์ของกระบวนการจะต้องรวดเร็วและแม่นยำสำหรับการเปลี่ยนแปลงใดๆ ในข้อมูลอ้างอิง
ถ้าตัวเศษและตัวส่วนของPF G R (ส), และ G F 1 (ส) ใน (23.3) ที่จะแสดงโดยพหุนามใน ส จากนั้นคำอธิบายของคอนโทรลเลอร์หลังการแปลงสามารถแสดงในรูปแบบต่อไปนี้
G 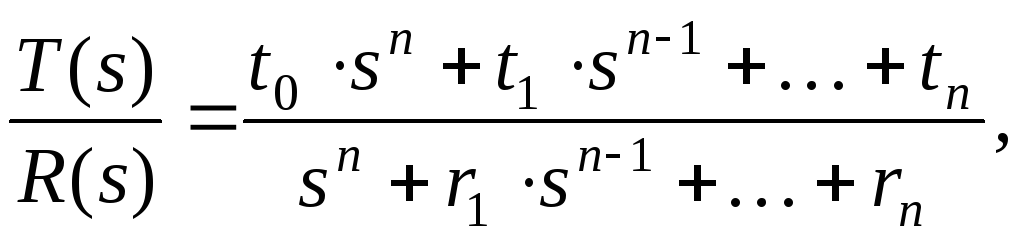
 เดอ
เดอ
r ผม ,ส ผม ,t ผม – พารามิเตอร์ของพหุนาม PF ส– ผู้ประกอบการ Laplace
ตัวควบคุมที่สอดคล้องกับสมการ (30.4) สามารถแสดงเป็นตัวควบคุมทั่วไป (ตัวควบคุมทั่วไป)
PF ของกระบวนการสามารถแสดงเป็น
รูปที่ 3.0.3 โครงสร้างของตัวควบคุมเชิงเส้นที่มีการควบคุมการป้อนกลับและการป้อนกลับในรูปแบบของ PF
ถ้า R(ส),ส(ส) และ ตู่(ส) มีลำดับที่สูงเพียงพอ กล่าวคือ มี "ปุ่มปรับเสียง" จำนวนเพียงพอ PF ของระบบปิดสามารถเปลี่ยนแปลงได้หลากหลาย คำสั่งควบคุม พีจะต้องเหมือนกับกระบวนการเดิม ใช่ กำลังเลือก R(ส) และ ส(ส) เราสามารถเปลี่ยนตัวส่วนของ PF ของระบบปิดได้ตามอำเภอใจ ในทางทฤษฎี หมายความว่าขั้วของระบบปิดสามารถเคลื่อนไปที่ใดก็ได้ในระนาบที่ซับซ้อน (ในทางปฏิบัติ แอมพลิจูดสูงสุดและอัตราการเปลี่ยนแปลงของสัญญาณควบคุมจะจำกัดเสรีภาพในการเคลื่อนที่ของเสา)
เป็นผลให้ระบบที่ไม่เสถียรที่มีขั้วที่มีส่วนจริงที่เป็นบวกสามารถทำให้เสถียรได้ด้วยความช่วยเหลือของ SU
30.1. การใช้งานตัวควบคุม PID
ประการแรก ควรมีการพัฒนารูปแบบตัวควบคุมแบบแยกส่วนและกำหนดอัตราการสุ่มตัวอย่างที่เหมาะสม แอมพลิจูดของค่าเอาต์พุตของตัวควบคุมต้องอยู่ระหว่างค่าต่ำสุดและสูงสุดที่อนุญาต บ่อยครั้งที่จำเป็นต้องจำกัดไม่เพียงแค่สัญญาณเอาท์พุตเท่านั้น แต่ยังรวมถึงอัตราการเปลี่ยนแปลงอันเนื่องมาจากความสามารถทางกายภาพของ MI และเพื่อป้องกันการสึกหรอที่มากเกินไป
การเปลี่ยนการตั้งค่าพารามิเตอร์และการเปลี่ยนจากการทำงานอัตโนมัติเป็นการทำงานด้วยตนเอง หรือการเปลี่ยนแปลงอื่นๆ ในสภาพการทำงานจะต้องไม่ก่อให้เกิดการรบกวนในกระบวนการควบคุม
ตัวควบคุมสามารถสร้างขึ้นในเทคโนโลยีแอนะล็อกตามแอมพลิฟายเออร์ในการดำเนินงานหรือเป็นอุปกรณ์ดิจิทัลที่ใช้ไมโครโปรเซสเซอร์ อย่างไรก็ตาม มีรูปลักษณ์เกือบเหมือนกัน - เป็นเคสขนาดเล็กที่ทนทานซึ่งช่วยให้สามารถติดตั้งในสภาพแวดล้อมทางอุตสาหกรรมได้
แม้ว่าเทคโนโลยีดิจิทัลจะมีข้อดีหลายประการ แต่แนวทางแบบแอนะล็อกเป็นพื้นฐานสำหรับโซลูชันดิจิทัล ข้อดีของตัวควบคุมดิจิทัล ได้แก่ ความสามารถในการเชื่อมต่อระหว่างกันโดยใช้ช่องทางการสื่อสาร ซึ่งช่วยให้สามารถแลกเปลี่ยนข้อมูลและการควบคุมระยะไกลได้ เรามีความสนใจในโปรแกรมสำหรับตัวควบคุม PID ดิจิทัล
รุ่นคอนโทรลเลอร์ PID แบบแยกส่วน . จำเป็นสำหรับการใช้งานซอฟต์แวร์ของคอนโทรลเลอร์แอนะล็อก หากตัวควบคุมได้รับการออกแบบบนพื้นฐานของคำอธิบายแบบแอนะล็อก จากนั้นจึงสร้างแบบจำลองที่ไม่ต่อเนื่องในช่วงเวลาสุ่มตัวอย่างที่น้อยเพียงพอ อนุพันธ์ของเวลาจะถูกแทนที่ด้วยความแตกต่างจำกัด และการรวมจะถูกแทนที่ด้วยการบวก คำนวณข้อผิดพลาดเอาต์พุตของกระบวนการสำหรับแต่ละตัวอย่าง
อี(k)=คุณ ค (k) – y(k) .
ในกรณีนี้ ช่วงสุ่มตัวอย่าง t สถือว่าคงที่ และการเปลี่ยนแปลงสัญญาณใดๆ ที่อาจเกิดขึ้นระหว่างช่วงการสุ่มตัวอย่างจะไม่นำมาพิจารณา
อัลกอริธึมตัวควบคุม PID มีสองประเภท - ตำแหน่งและส่วนเพิ่ม
อัลกอริธึมตัวควบคุม PID ตำแหน่ง ในอัลกอริธึมตำแหน่ง ( ตำแหน่ง รูปร่าง) สัญญาณเอาต์พุตเป็นค่าสัมบูรณ์ของตัวแปรควบคุม MI คอนโทรลเลอร์ PID แบบแยกส่วนมีรูปแบบ
ยู(k)=คุณ 0 +คุณ พี (k)+คุณ ฉัน (k)+คุณ ดี (k).
ในกรณีนี้ ช่วงเวลาการสุ่มตัวอย่าง ts จะถือเป็นค่าคงที่ และการเปลี่ยนแปลงใดๆ ในสัญญาณที่อาจเกิดขึ้นระหว่างช่วงการสุ่มตัวอย่างจะไม่นำมาพิจารณา
แม้ว่าจะมีข้อผิดพลาดในการควบคุมเป็นศูนย์ แต่สัญญาณเอาต์พุตจะไม่เป็นศูนย์และถูกกำหนดโดย offset ยู 0 .
ส่วนที่เป็นสัดส่วนของตัวควบคุมมีรูปแบบ
ยู พี (k)= K∙ อี(k).
ส่วนที่เป็นปริพันธ์ถูกประมาณโดยความแตกต่างจำกัด
ยู ฉัน (k) = ยู ฉัน (k – 1) + K∙ (t ส / ตู่ ผม) ∙ อี(k)= ยู ฉัน (k – 1) + K∙ เอ∙ อี(k).
ค่าของเทอมที่สองที่เล็ก t ส และใหญ่ ตู่ ผมอาจมีขนาดเล็กมาก ดังนั้นคุณต้องมั่นใจในความแม่นยำของการแสดงเครื่องจักร
ส่วนต่างของตัวควบคุม PID นั้นประมาณโดยส่วนต่างย้อนหลัง
ยู ดี (k) =ข∙ ยู ดี (k – 1) – K∙ (ตู่ d / t ส) ∙ (1– ข)∙ [y(k)– y(k – 1)],
|
|
ค่า ตู่ d / นู๋ = ตู่ ฉคือการทำให้เป็นมาตรฐาน นู๋ครั้ง) ค่าคงที่เวลาของตัวกรองในการประมาณองค์ประกอบส่วนต่างของกฎหมายควบคุมโดยลิงก์ aperiodic ของลำดับแรก ตัวเลข นู๋อยู่ในช่วงตั้งแต่ 5 ถึง 10 ค่า ขอยู่ในช่วง 0 ถึง 1
อัลกอริทึมที่เพิ่มขึ้น โดยจะคำนวณเฉพาะการเปลี่ยนแปลงของสัญญาณเอาท์พุตเท่านั้น อัลกอริทึมการเพิ่ม ( เพิ่มขึ้น รูปร่าง) ตัวควบคุม PID จะสะดวกต่อการใช้งานหาก IM เป็นผู้รวมระบบ เช่น สเต็ปเปอร์มอเตอร์ อีกตัวอย่างหนึ่งของ MI ดังกล่าวคือวาล์วที่การเปิดและปิดถูกควบคุมโดยแรงกระตุ้นและคงตำแหน่งไว้ในกรณีที่ไม่มีสัญญาณอินพุต
ในอัลกอริธึมส่วนเพิ่ม เฉพาะการเปลี่ยนแปลงในสัญญาณเอาต์พุตควบคุมจากช่วงเวลา ( k – 1) จนถึงขณะนี้ k. อัลกอริทึมของตัวควบคุมเขียนเป็น
Δ ยู ฉัน (k) = ยู (k) – ยู (k – 1) = . ยู พี (k) + Δ ยู ฉัน (k) + Δ ยู ดี (k).
ส่วนที่เป็นสัดส่วนของอัลกอริธึมส่วนเพิ่มคำนวณจากสมการ
Δ ยู พี (k) = ยู พี (k) – ยู พี (k – 1) =K∙ [อี(k)– อี(k – 1)] = K∙ Δ อี(k).
ส่วนสำคัญ - จากสมการ
Δ ยู ฉัน (k) = ยู ฉัน (k) – ยู ฉัน (k – 1) =K∙ เอ∙ อี(k).
ส่วนต่างมาจากสมการ
Δ ยู ดี (k) =ข Δ ยู ดี (k – 1) – K∙ (ตู่ d / t ส)∙(1– ข)∙ [Δ y(k)– Δ y(k – 1),
Δ y(k) =y(k)– y(k – 1).
อัลกอริทึมนั้นง่ายมาก สำหรับการใช้งานตามกฎแล้วการดำเนินการที่มีจุดลอยตัวของความแม่นยำปกติก็เพียงพอแล้ว ไม่มีปัญหาเนื่องจากความอิ่มตัว เมื่อเปลี่ยนจากโหมดแมนนวลไปเป็นตัวควบคุมอัตโนมัติที่คำนวณการเพิ่มขึ้น ไม่จำเป็นต้องกำหนดค่าเริ่มต้นให้กับสัญญาณควบคุม ( ยู 0 ในอัลกอริธึมตำแหน่ง)
IM สามารถนำไปยังตำแหน่งที่ต้องการได้ในระหว่างการเริ่มต้นใช้งานทั้งด้วยการควบคุมแบบแมนนวลและแบบอัตโนมัติ ข้อเสียเล็ก ๆ น้อย ๆ ของอัลกอริธึมส่วนเพิ่มคือต้องคำนึงถึงส่วนประกอบสำคัญด้วย
ค่าอ้างอิงจะลดลงทั้งในส่วนที่เป็นสัดส่วนและส่วนต่างโดยเริ่มจากตัวอย่างที่สองหลังจากที่มีการเปลี่ยนแปลง ดังนั้น หากใช้คอนโทรลเลอร์ที่ใช้อัลกอริทึมแบบเพิ่มหน่วยโดยไม่มีส่วนประกอบที่สำคัญ กระบวนการควบคุมอาจเบี่ยงเบนจากค่าอ้างอิง
การกำหนดอัตราการสุ่มตัวอย่างใน SN . มันเป็นศิลปะมากกว่าวิทยาศาสตร์ อัตราการสุ่มตัวอย่างต่ำเกินไปจะลดประสิทธิภาพของการควบคุม โดยเฉพาะอย่างยิ่งความสามารถของระบบควบคุมในการชดเชยสิ่งรบกวน แต่ถ้าช่วงการสุ่มตัวอย่างเกินเวลาตอบสนองของกระบวนการ การรบกวนอาจส่งผลต่อกระบวนการและหายไปก่อนที่ตัวควบคุมจะดำเนินการแก้ไข ดังนั้น เมื่อกำหนดอัตราการสุ่มตัวอย่าง ควรพิจารณาทั้งพลวัตของกระบวนการและลักษณะของการก่อกวนด้วย
ในทางกลับกัน อัตราการสุ่มตัวอย่างที่สูงเกินไปจะทำให้โหลดคอมพิวเตอร์และ IM สึกหรอเพิ่มขึ้น
ดังนั้น การกำหนดความถี่ในการสุ่มตัวอย่างจึงเป็นการประนีประนอมระหว่างข้อกำหนดของพลวัตของกระบวนการและประสิทธิภาพที่มีอยู่ของคอมพิวเตอร์และกลไกทางเทคโนโลยี ตัวควบคุมดิจิทัลมาตรฐานที่ทำงานด้วยลูปควบคุมจำนวนน้อย (8 ถึง 16) ใช้อัตราการสุ่มตัวอย่างคงที่ตามลำดับเศษส่วนของวินาที
อัตราส่วนสัญญาณต่อสัญญาณรบกวนยังส่งผลต่ออัตราการสุ่มตัวอย่างด้วย ที่ค่าต่ำของอัตราส่วนนี้ เช่น ที่สัญญาณรบกวนสูง ควรหลีกเลี่ยงอัตราการสุ่มตัวอย่างที่สูง เนื่องจากการเบี่ยงเบนในสัญญาณการวัดมีแนวโน้มที่จะเกี่ยวข้องกับสัญญาณรบกวนความถี่สูงมากกว่า และไม่เกี่ยวข้องกับการเปลี่ยนแปลงจริงในกระบวนการทางกายภาพ
อัตราการสุ่มตัวอย่างที่เพียงพอถือว่าเกี่ยวข้องกับแบนด์วิดท์หรือเวลาการตั้งค่าของระบบควบคุมแบบวงปิด กฎทั่วไปแนะนำว่าอัตราการสุ่มตัวอย่างสูงกว่าแบนด์วิดท์ 6-10 เท่า หรือเวลาการตั้งค่าอย่างน้อยห้าช่วงสุ่มตัวอย่าง
ในกรณีที่ยอมรับเฟสล่าช้าเพิ่มเติมได้ 5-15° กฎต่อไปนี้จะถูกต้อง
t ส · ω กับ = 0,15 – 0,5 ,
ที่ไหน ω กับ – แบนด์วิดธ์ของระบบ (ที่ระดับ 3 dB) t ส – ระยะเวลาการหาปริมาณหรือช่วงการสุ่มตัวอย่าง (วิธีนี้ใช้ในคอนโทรลเลอร์ PID แบบ single และ multi-loop แบบดิจิตอลอุตสาหกรรมจำนวนมาก)
ข้อจำกัดของสัญญาณควบคุม . ข้อกำหนดเบื้องต้นสองประการสำหรับการจำกัดสัญญาณควบคุม:
1) แอมพลิจูดของสัญญาณเอาต์พุตต้องไม่เกินช่วงของ DAC ที่เอาต์พุตของคอมพิวเตอร์
2) ช่วงการทำงานของ IM ก็จำกัดเช่นกัน วาล์วเปิดไม่เกิน 100% มอเตอร์ไม่สามารถจ่ายกระแสและแรงดันได้ไม่จำกัด
ดังนั้นอัลกอริธึมการควบคุมจึงต้องมีฟังก์ชันบางอย่างที่จำกัดสัญญาณเอาต์พุต ในบางกรณี ต้องกำหนดเดดแบนด์หรือเดดแบนด์
หากใช้คอนโทรลเลอร์ที่มีอัลกอริธึมส่วนเพิ่ม การเปลี่ยนแปลงในสัญญาณควบคุมอาจมีขนาดเล็กมากจน MI ไม่สามารถประมวลผลได้ หากสัญญาณควบคุมเพียงพอที่จะส่งผลกระทบต่อ MI ขอแนะนำให้หลีกเลี่ยงการทำงานเพียงเล็กน้อยแต่บ่อยครั้ง ซึ่งอาจเร่งการสึกหรอได้
วิธีแก้ปัญหาอย่างง่ายคือการสรุปการเปลี่ยนแปลงเล็กน้อยในตัวแปรควบคุมและออกสัญญาณควบคุม MI หลังจากเกินค่าเกณฑ์บางค่าแล้วเท่านั้น การแนะนำ Dead Zone นั้นสมเหตุสมผลก็ต่อเมื่อเกินความละเอียดของ DAC ที่เอาต์พุตของคอมพิวเตอร์
การป้องกันความอิ่มตัวของอินทิกรัล Integral windup เกิดขึ้นเมื่อตัวควบคุม PI หรือ PID ต้องชดเชยข้อผิดพลาดที่อยู่นอกช่วงของตัวแปรควบคุมเป็นเวลานาน เนื่องจากเอาต์พุตของตัวควบคุมมีจำกัด ข้อผิดพลาดจึงทำให้เป็นโมฆะได้ยาก
หากข้อผิดพลาดในการควบคุมยังคงมีสัญญาณอยู่เป็นเวลานาน ค่าของส่วนประกอบสำคัญของตัวควบคุม PID จะมีขนาดใหญ่มาก สิ่งนี้จะเกิดขึ้นหากสัญญาณควบคุมถูก จำกัด มากจนเอาต์พุตที่คำนวณได้ของตัวควบคุมแตกต่างจากเอาต์พุตจริงของ MI
เนื่องจากส่วนประกอบสำคัญจะกลายเป็นศูนย์ในบางครั้งหลังจากที่ค่าความผิดพลาดได้เปลี่ยนเครื่องหมาย ความอิ่มตัวของสีทั้งหมดอาจนำไปสู่การเกิดยอดเกินจำนวนมาก ความอิ่มตัวของอินทิกรัลเป็นผลมาจากความไม่เป็นเชิงเส้นในระบบที่เกี่ยวข้องกับการตัดสัญญาณควบคุมเอาต์พุต และไม่อาจสังเกตพบในระบบเชิงเส้นตรงได้
อิทธิพลของส่วนประกอบสำคัญสามารถจำกัดได้ด้วยการรวมแบบมีเงื่อนไข ตราบใดที่ข้อผิดพลาดมีขนาดใหญ่เพียงพอ ไม่จำเป็นต้องมีส่วนประกอบสำคัญในการสร้างสัญญาณควบคุม แต่ส่วนที่เป็นสัดส่วนก็เพียงพอสำหรับการควบคุม
ส่วนสำคัญที่ใช้ในการขจัดข้อผิดพลาดที่อยู่กับที่จำเป็นต้องใช้เฉพาะในกรณีที่ข้อผิดพลาดค่อนข้างเล็ก ด้วยการรวมตามเงื่อนไข ส่วนประกอบนี้จะถูกนำมาพิจารณาในสัญญาณสุดท้ายก็ต่อเมื่อข้อผิดพลาดไม่เกินค่าเกณฑ์ที่กำหนด สำหรับข้อผิดพลาดขนาดใหญ่ ตัวควบคุม PI ทำงานเหมือนกับตัวควบคุม P การเลือกค่าขีดจำกัดสำหรับการเปิดใช้งานเงื่อนไขอินทิกรัลนั้นไม่ใช่เรื่องง่าย ในตัวควบคุมแบบแอนะล็อก การรวมแบบมีเงื่อนไขจะดำเนินการโดยใช้ซีเนอร์ไดโอด (ลิมิตเตอร์) ซึ่งเชื่อมต่อแบบขนานกับตัวเก็บประจุในวงจรป้อนกลับของแอมพลิฟายเออร์ปฏิบัติการในบล็อกการรวมของคอนโทรลเลอร์ โครงการดังกล่าวจำกัดการมีส่วนร่วมของสัญญาณแบบบูรณาการ
ในตัวควบคุม PID แบบดิจิตอล จะหลีกเลี่ยงความอิ่มตัวของสีได้ง่ายกว่า ส่วนสำคัญจะถูกปรับในแต่ละช่วงการสุ่มตัวอย่าง เพื่อให้เอาต์พุตของตัวควบคุมไม่เกินขีดจำกัดที่กำหนด
สัญญาณควบคุมจะถูกคำนวณก่อนโดยใช้อัลกอริธึมตัวควบคุม PI จากนั้นตรวจสอบเพื่อดูว่าเกินขีดจำกัดที่ตั้งไว้หรือไม่:
ยู = ยู นาที , ถ้า ยู d < ยู นาที ;
ยู = ยู d , ถ้า ยู นาที ≤ ยู d < ยู max ;
ยู = ยู max , ถ้า ยู d ≤ ยู max ;
หลังจากจำกัดสัญญาณเอาท์พุตแล้ว ส่วนสำคัญของตัวควบคุมจะถูกรีเซ็ต ด้านล่างนี้คือตัวอย่างโปรแกรมสำหรับคอนโทรลเลอร์ PI ที่มีการป้องกันความอิ่มตัว
ตราบใดที่สัญญาณควบคุมยังคงอยู่ภายในขีดจำกัดที่ตั้งไว้ คำสั่งสุดท้ายในข้อความของโปรแกรมจะไม่ส่งผลกระทบต่อส่วนสำคัญของคอนโทรลเลอร์
(*การเริ่มต้น*) c1:=K*taus/Ti;
(*ผู้ควบคุม*)
Ipart:= Ipart + c1*e;
ud:=K*e+Ipart; (*การคำนวณสัญญาณควบคุม*)
ถ้า(ud อื่นถ้า (ud<
umax) then u:= ud Ipart:=u-K*e; (* การแก้ไขส่วนสำคัญ "ต่อต้านความอิ่มตัว" *) ภาพประกอบของปัญหาความอิ่มตัวเชิงบูรณาการสำหรับไดรฟ์กำหนดตำแหน่งที่มีตัวควบคุม PI อยู่ในรูปที่ 30.4. การสลับโหมดการทำงานที่ราบรื่น
เมื่อเปลี่ยนจากโหมดแมนนวลเป็นโหมดอัตโนมัติ เอาต์พุตของคอนโทรลเลอร์อาจกระโดดแม้ว่าข้อผิดพลาดในการควบคุมจะเป็นศูนย์ เหตุผลก็คือว่าอินทิกรัลเทอมในอัลกอริธึมคอนโทรลเลอร์ไม่เท่ากับศูนย์เสมอไป คอนโทรลเลอร์เป็นระบบไดนามิก และส่วนประกอบสำคัญเป็นหนึ่งในองค์ประกอบของสถานะภายใน ซึ่งต้องทราบเมื่อเปลี่ยนโหมดการควบคุม สามารถป้องกันการกระโดดของค่าเอาต์พุตของคอนโทรลเลอร์ได้ และการเปลี่ยนแปลงโหมดในกรณีนี้เรียกว่าการเปลี่ยนแบบไม่มีจุด (bumpless transfer) เป็นไปได้สองสถานการณ์: a) เปลี่ยนจากโหมดแมนนวลเป็นโหมดอัตโนมัติหรือในทางกลับกัน; b) การเปลี่ยนพารามิเตอร์ตัวควบคุม การเปลี่ยนแปลงที่ราบรื่นในกรณี a) สำหรับคอนโทรลเลอร์แอนะล็อกทำได้โดยนำกระบวนการด้วยตนเองไปสู่สถานะที่ค่าเอาต์พุตที่วัดได้เท่ากับค่าอ้างอิง กระบวนการจะคงอยู่ในสถานะนี้ตราบใดที่เอาต์พุตของคอนโทรลเลอร์เป็นศูนย์ ในกรณีนี้ ส่วนประกอบสำคัญจะเป็นศูนย์เช่นกัน และเนื่องจากข้อผิดพลาดเป็นศูนย์ การเปลี่ยนแปลงจึงเป็นไปอย่างราบรื่น ขั้นตอนนี้ใช้ได้กับตัวควบคุมดิจิทัลด้วย อีกวิธีหนึ่งคือค่อยๆ นำค่าอ้างอิงไปยังค่าสุดท้ายที่ต้องการอย่างช้าๆ ขั้นแรก ค่าอ้างอิงถูกกำหนดให้เท่ากับค่าที่วัดได้ในปัจจุบัน จากนั้นค่อย ๆ ปรับตามค่าที่ต้องการด้วยตนเอง หากดำเนินการตามขั้นตอนนี้ช้าเพียงพอ ส่วนของสัญญาณคอนโทรลเลอร์จะยังคงเล็กอยู่จนทำให้แน่ใจได้ว่าการเปลี่ยนแปลงจะราบรื่น ข้อเสียของวิธีนี้คือต้องใช้เวลานานพอสมควร ซึ่งขึ้นอยู่กับลักษณะของกระบวนการ จำกัดอัตราการเปลี่ยนแปลงของสัญญาณควบคุม
. ในระบบควบคุมหลายๆ ระบบ จำเป็นต้องจำกัดทั้งแอมพลิจูดและอัตราการเปลี่ยนแปลงของสัญญาณควบคุม ด้วยเหตุนี้จึงใช้วงจรป้องกันพิเศษซึ่งเชื่อมต่อหลังจากช่องสัญญาณเพื่อป้อนค่าอ้างอิงด้วยตนเอง ยู ค (t) และส่งสัญญาณกรองไปยังตัวควบคุม ยู หลี่ (t) ดังแสดงในรูป 30.5. เป็นผลให้กระบวนการ "เห็น" สัญญาณควบคุมนี้แทนสัญญาณที่ป้อนด้วยตนเอง วิธีนี้มักใช้ในการควบคุมไดรฟ์ไฟฟ้า การจำกัดอัตราการเปลี่ยนแปลงของสัญญาณสามารถทำได้โดยใช้ลูปป้อนกลับอย่างง่าย สัญญาณควบคุมมือ ยู ค (t) ทำหน้าที่เป็นข้อมูลอ้างอิงเปรียบเทียบกับสัญญาณควบคุมที่ถูกต้อง ยู หลี่ (t). ประการแรก ความแตกต่างถูกจำกัดด้วยข้อจำกัด ueนาทีและ ยูอีมโอ้. ค่าผลลัพธ์จะถูกรวมเข้าด้วยกัน โดยอินทิกรัลถูกประมาณโดยผลรวมจำกัด อัลกอริทึมสำหรับการจำกัดอัตราการเปลี่ยนแปลงมีดังนี้: ถ้า (ue< uemin) then uelim:= uemin
(*функция ограничения*)
else if (ue < uemax) then uelim:= ue อื่น uelim:= uemax; uL = uL_old + taus*uelim; คุณสมบัติการคำนวณของอัลกอริธึมตัวควบคุม PID
การนำตัวควบคุม PID ไปใช้แบบดิจิทัล เนื่องจากลักษณะการคำนวณที่ต่อเนื่องกัน ทำให้เกิดความล่าช้าที่ไม่พบในเทคโนโลยีแอนะล็อก นอกจากนี้ ข้อจำกัดบางประการ (การป้องกันความอิ่มตัวและอัลกอริธึมการเปลี่ยนแบบนุ่มนวล) กำหนดให้เอาต์พุตตัวควบคุมและตัวรับ MI เกิดขึ้นพร้อมกัน ดังนั้น ต้องรักษาความล่าช้าในการคำนวณให้น้อยที่สุด ในการทำเช่นนี้ องค์ประกอบบางอย่างของตัวควบคุมดิจิทัลจะถูกคำนวณก่อนเวลาสุ่มตัวอย่าง สำหรับเรกูเลเตอร์ที่มีการป้องกันความอิ่มตัว สามารถคำนวณส่วนสำคัญล่วงหน้าได้โดยใช้ผลต่างไปข้างหน้า ยู ฉัน
(k + 1)
=คุณ ฉัน (k)+คหนึ่ง · อี
(k)
+ ค 2 ·
[ยู
(k)
- ยู d
(k)
] , ที่ไหน ยู
– มูลค่าจำกัด ยู d
; ตู่ t
เป็นสัมประสิทธิ์ที่เรียกว่าค่าคงที่เวลาติดตาม ส่วนต่างดูเหมือน ค 3
=
(1–
ข)
· K· ตู่ d
/t ส
;
x
(เค- 1) =
ข·
ยู ดี (เค- 1)+ค 3 · y
(เค- 1). ตัวแปร xสามารถอัปเดตได้ทันทีหลังจากจุดในเวลา k x
(k) =
ข·
x(เค- 1)+ค 3 (1 .) –
ข)
· y
(k). ทางนี้, ยู ดี (k
+
1)
สามารถคำนวณได้จาก (24.2) ทันทีที่ได้รับผลการวัดค่า y(k
+
1). จำเป็นต้องปรับการคำนวณให้เหมาะสม เนื่องจากตัวควบคุมดิจิทัลบางครั้งต้องดำเนินการควบคุมหลายพันครั้งต่อวินาที ภายใต้เงื่อนไขเหล่านี้ สิ่งสำคัญคือต้องมีสัมประสิทธิ์บางอย่างในทันที แทนที่จะต้องคำนวณใหม่ทุกครั้ง นอกจากนี้หน่วยงานกำกับดูแลอุตสาหกรรมยังไม่มีโปรเซสเซอร์ที่เร็วที่สุด ( ผม 386, 486). ดังนั้นลำดับและประเภทของการคำนวณจึงมีผลอย่างมากต่อความเร็วของการดำเนินการควบคุม อัลกอริทึม PID
. ตัวอย่างโปรแกรมควบคุม PID ใน Pascal การคำนวณค่าสัมประสิทธิ์ ค 1 ,ค 2 และ ค 3 ต้องทำก็ต่อเมื่อพารามิเตอร์ตัวควบคุมมีการเปลี่ยนแปลง K,
ตู่ ผม
,
ตู่ dและ ตู่ ฉ. อัลกอริธึมของตัวควบคุมจะดำเนินการในเวลาของแต่ละตัวอย่าง โปรแกรมมีการป้องกันความอิ่มตัวของส่วนประกอบสำคัญ (*การคำนวณค่าสัมประสิทธิ์ล่วงหน้า*) c1:=K*taus /
Ti; (* สมการ 23.7 *) с2:= เทา /
TT; (* สมการ 24.1 *) เบต้า:=Td /
(Td+เทาส์*N); (* สมการ 24.1 *) c3:= K*Td*(l-เบต้า) /
เทาส์; (* สมการ 24.2 *) c4:= c3*(1 - เบต้า); (* ค่าคงที่ท้องถิ่น*) (* อัลกอริธึมการควบคุม *) uc:=ADInput(ch1); (* อินพุตค่าอ้างอิง, อินพุตแบบอะนาล็อก *) y:= AD_input(ch2); (* อินพุตการวัด, อินพุตแบบอะนาล็อก *) e:= uc-y; (* การคำนวณข้อผิดพลาดการควบคุม *) ppart:= K*e; (*สัดส่วนตามสัดส่วน*) dpart:= x - (c3*y); (* ส่วนต่าง *) ud:=uO+ppart+ipart+dpart; (* เอาต์พุตตัวควบคุมก่อนการตัด *)if(ud นักศึกษา นักศึกษาระดับบัณฑิตศึกษา นักวิทยาศาสตร์รุ่นเยาว์ที่ใช้ฐานความรู้ในการศึกษาและการทำงานจะขอบคุณอย่างยิ่ง โฮสต์ที่ http://www.allbest.ru กระทรวงศึกษาธิการและวิทยาศาสตร์แห่งสหพันธรัฐรัสเซีย สถาบันการศึกษางบประมาณของรัฐบาลกลาง การศึกษาระดับมืออาชีพที่สูงขึ้น "มหาวิทยาลัยรัฐคูบาน" (FGBOU VPO "KubGU") วุฒิการศึกษาระดับปริญญาตรี การพัฒนาและออกแบบตัวควบคุม PID งานนี้ทำโดย Roman Valerievich Presnyakov ที่ปรึกษาวิทยาศาสตร์ ดร. ฟิสิกส์.-คณิต. วิทยาศาสตร์ ศาสตราจารย์ อี.เอ็น. Tumaev ผู้ควบคุมบัญชี แคนดี้ ฟิสิกส์.-คณิต. วิทยาศาสตร์, รองศาสตราจารย์ A. A. Martynov Krasnodar 2015 ผลงานรอบสุดท้าย 83 หน้า 29 รูป 42 แหล่ง การควบคุม PID, ระบบฝังตัว, ไมโครคอนโทรลเลอร์, โมดูลซอฟต์แวร์, MSP430, INTERRUPT วัตถุประสงค์ของการศึกษาคุณสมบัติขั้นสุดท้ายคือการศึกษาหลักการทั่วไปของการสร้างตัวควบคุมเทคโนโลยีแบบสัดส่วน-อินทิกรัล-ดิฟเฟอเรนเชียล และการออกแบบอัลกอริธึมสำหรับตัวควบคุมอุณหภูมิโดยใช้ไมโครคอนโทรลเลอร์ MSP430 ราคาถูก (Texas Instruments) บทความนี้ให้ภาพรวมของวิธีการของไมโครคอนโทรลเลอร์สมัยใหม่และหลักการทำงานของไมโครคอนโทรลเลอร์ ดำเนินการวิเคราะห์ปัญหาการใช้ฮาร์ดแวร์และซอฟต์แวร์ของตัวควบคุมไมโครโปรเซสเซอร์ทางเทคโนโลยี มีคำแนะนำสำหรับการออกแบบเครื่องมือวัดและควบคุมที่ใช้ไมโครโปรเซสเซอร์ และการสร้างซอฟต์แวร์สำหรับระบบฝังตัว มีการเสนอรูปแบบการใช้งานอัลกอริธึมตัวควบคุม PID คุณลักษณะที่โดดเด่นคือการใช้อัลกอริธึมที่ไม่รวมการใช้ตัวเลขทศนิยม การกำหนดและตัวย่อ บทนำ 2. ฟังก์ชั่นความไว สมการ Pid ดิจิตอล 2.2 รูปแบบที่ไม่ต่อเนื่องของตัวควบคุม สมการ PID ดิจิตอล 3. คุณภาพการกำกับดูแล 3.1 การลดลงของอิทธิพลของการรบกวนจากภายนอก เกณฑ์คุณภาพ 4. การตั้งค่าพารามิเตอร์ตัวควบคุม หลักการพื้นฐาน 4.1 การเลือกพารามิเตอร์ตัวควบคุม การตั้งค่าด้วยตนเองและอัตโนมัติ 5. การเขียนโปรแกรมระบบสมองกลฝังตัว 5.1 หลักการทั่วไปในการพัฒนาระบบสมองกลฝังตัว 5.2 ขั้นตอนการสร้างซอฟต์แวร์สำหรับระบบฝังตัว 5.3 ลำดับชั้นของรหัสปฏิบัติการในระบบฝังตัว 6. อัลกอริธึมของซอฟต์แวร์ที่สร้างขึ้น 6.1 คำอธิบายของอัลกอริธึมการทำงานของตัวควบคุมอุณหภูมิ PID ที่ใช้ไมโครคอนโทรลเลอร์ MSP430F149 บทสรุป รายการแหล่งที่ใช้ การกำหนดและตัวย่อ ไมโครคอนโทรลเลอร์ควบคุมอุณหภูมิ ไมโครคอนโทรลเลอร์ อัลกอริทึม PID อัลกอริธึมเชิงสัดส่วน-อินทิกรัล-ดิฟเฟอเรนเชียล ชั้นนามธรรมของฮาร์ดแวร์ (ชั้นที่เป็นนามธรรมของฮาร์ดแวร์) สภาพแวดล้อมการพัฒนาแบบบูรณาการ (สภาพแวดล้อมการพัฒนาแบบบูรณาการ) การปรับความกว้างพัลส์ ตัวควบคุมลอจิกแบบตั้งโปรแกรมได้ การควบคุมการกำกับดูแลและการได้มาซึ่งข้อมูล (การควบคุมการกำกับดูแลและการได้มาซึ่งข้อมูล) อินเทอร์เฟซอุปกรณ์ต่อพ่วงแบบอนุกรม (อินเทอร์เฟซอุปกรณ์ต่อพ่วงแบบอนุกรม) อินเทอร์เฟซการเขียนโปรแกรมแอปพลิเคชัน (อินเทอร์เฟซการเขียนโปรแกรมแอปพลิเคชัน) ที่ทำงานอัตโนมัติ ซอฟต์แวร์ การแนะนำ การควบคุมกระบวนการทางเทคโนโลยีด้วยความช่วยเหลือของผู้ควบคุมที่ทำงานตามกฎส่วนต่างสัดส่วน-ปริพันธ์-ส่วนต่าง (ตัวควบคุม PID) ช่วยให้รักษาคุณค่าทางเทคโนโลยีที่ต้องการด้วยความแม่นยำสูงเพียงพอและภูมิคุ้มกันทางเสียงที่ยอมรับได้ต่ออิทธิพลที่รบกวนจากภายนอก ตัวควบคุม PID สมัยใหม่ถูกนำมาใช้เป็นโมดูลซอฟต์แวร์ของระบบ SCADA ที่ทำงานบนเวิร์กสเตชันอัตโนมัติ (AWS) หรือตัวควบคุมลอจิกแบบตั้งโปรแกรมได้ (PLC) และเป็นตัวควบคุมกระบวนการแยกต่างหากที่อยู่บนตู้ควบคุมภายในและส่วนกลาง เนื่องจากเป็นองค์ประกอบพื้นฐานของการประมวลผลและควบคุมข้อมูล ไมโครโปรเซสเซอร์ที่มีฟังก์ชันการทำงานที่จำกัดจึงมักใช้ ซึ่งทำให้เกิดปัญหาขาดแคลนทรัพยากรฮาร์ดแวร์และต้นทุนของระบบเพิ่มขึ้น วัตถุประสงค์ของงานนี้คือการทบทวนหลักการของการสร้างตัวควบคุมสัดส่วน-อินทิกรัล-อนุพันธ์และพัฒนา บนพื้นฐานของการทบทวน หลักการสำหรับการสร้างตัวควบคุมอุณหภูมิ PID เมื่อสร้างตัวควบคุมอุณหภูมิ PID จะใช้ไมโครโปรเซสเซอร์ควบคุมเทคโนโลยีมิเตอร์แบบตั้งโปรแกรมได้ F0303.2 ที่ใช้ไมโครคอนโทรลเลอร์ MSP430F149, โปรแกรมเมอร์ MSP-FET430UIF, เครื่องเปรียบเทียบแรงดันไฟฟ้า P3003 ที่มีช่วงเอาต์พุตแรงดันไฟฟ้าตั้งแต่ 10 nV ถึง 11.111110 V และระดับความแม่นยำ 0.0005 . โปรแกรมไมโครคอนโทรลเลอร์ถูกสร้างขึ้นใน IAR Embedded Workbench สำหรับสภาพแวดล้อมการพัฒนาแบบรวม MSP430 6 เอกสารทางเทคนิคได้มาจากเว็บไซต์ของผู้ผลิตไมโครคอนโทรลเลอร์ สำหรับการใช้งานการควบคุม PID อย่างเต็มรูปแบบในอุปกรณ์ไมโครโปรเซสเซอร์ จำเป็นต้องใช้ระบบย่อยต่อไปนี้: ระบบย่อยการวัด ระบบย่อยการประมวลผลอัลกอริทึม PID ระบบย่อยส่วนต่อประสานผู้ใช้การจัดการ ระบบย่อยเอาต์พุตผลกระทบด้านกฎระเบียบ 1. หลักการสร้างตัวควบคุม PID 1.1 ปัญหาทั่วไปของการใช้ตัวควบคุม PID สำหรับการใช้งานจริงจำเป็นต้องคำนึงถึงคุณลักษณะที่สร้างขึ้นโดยเงื่อนไขการใช้งานจริงและการใช้งานทางเทคนิค คุณสมบัติเหล่านี้รวมถึง: ช่วงไดนามิกของการเปลี่ยนแปลงในตัวแปรทางกายภาพในระบบ (เช่น กำลังฮีตเตอร์จำกัด ความจุวาล์วจำกัด); ไม่สามารถเปลี่ยนสัญญาณของการควบคุมได้เสมอไป (ตัวอย่างเช่น ระบบบำรุงรักษาอุณหภูมิมักไม่มีตู้เย็น เครื่องยนต์อาจไม่มีจังหวะย้อนกลับ ไม่ใช่เครื่องบินทุกลำที่มีระบบแรงขับเชิงลบ) ความแม่นยำในการวัดที่จำกัด ซึ่งต้องใช้มาตรการพิเศษเพื่อดำเนินการสร้างความแตกต่างโดยมีข้อผิดพลาดที่ยอมรับได้ การมีอยู่ของความไม่เป็นเชิงเส้นทั่วไปในเกือบทุกระบบ: ความอิ่มตัว (จำกัดช่วงไดนามิกของการเปลี่ยนแปลงตัวแปร), การจำกัดอัตราการฆ่า, ฮิสเทรีซิสและฟันเฟือง; การกระจายทางเทคโนโลยีและการแปรผันแบบสุ่มของพารามิเตอร์ของตัวควบคุมและวัตถุ การใช้งานคอนโทรลเลอร์แบบไม่ต่อเนื่อง ความจำเป็นในการสลับโหมดการควบคุมที่ราบรื่น (ไม่ช็อต) 1.2 PID Derivative Assembly ปัญหาของความแตกต่างเชิงตัวเลขค่อนข้างเก่าและพบได้บ่อยในตัวควบคุมทั้งแบบดิจิทัลและอนาล็อก สาระสำคัญของมันอยู่ในความจริงที่ว่าอนุพันธ์มักจะคำนวณเป็นความแตกต่างระหว่างสองตัวแปรที่มีขนาดใกล้เคียงกัน ดังนั้นข้อผิดพลาดสัมพัทธ์ของอนุพันธ์มักจะกลายเป็นมากกว่าข้อผิดพลาดสัมพัทธ์ของการแทนค่าตัวเลขของตัวแปรอนุพันธ์ โดยเฉพาะอย่างยิ่งหากอินพุตของดิฟเฟอเรนติเอเตอร์ได้รับสัญญาณไซน์ A * sin (sht) จากนั้นที่เอาต์พุตเราจะได้ A * w * cos (sht) นั่นคือด้วยความถี่ที่เพิ่มขึ้น w แอมพลิจูดของสัญญาณที่ เอาต์พุตของตัวสร้างความแตกต่างเพิ่มขึ้น กล่าวอีกนัยหนึ่ง ดิฟเฟอเรนติเอเตอร์ขยายสัญญาณรบกวนความถี่สูง ระเบิดสั้น และสัญญาณรบกวน หากสัญญาณรบกวนที่ขยายโดยดิฟเฟอเรนติเอเตอร์อยู่นอกช่วงความถี่ในการทำงานของคอนโทรลเลอร์ PID ก็สามารถลดทอนได้โดยใช้ฟิลเตอร์กรองความถี่สูง การใช้งานโครงสร้างของตัวสร้างความแตกต่างพร้อมตัวกรองแสดงในรูปที่ 1 ที่นี่ นั่นคือ ฟังก์ชันการถ่ายโอนของดิฟเฟอเรนติเอเตอร์ที่เป็นผลลัพธ์ D สามารถแสดงเป็นผลคูณของฟังก์ชันการถ่ายโอนของดิฟเฟอเรนติเอเตอร์ในอุดมคติและฟังก์ชันการถ่ายโอนของฟิลเตอร์ลำดับที่หนึ่ง: โดยที่สัมประสิทธิ์ N กำหนดความถี่ตัดของตัวกรองและมักจะเลือกเท่ากับ 2…20; T/N - ค่าคงที่เวลาของตัวกรอง; s คือความถี่เชิงซ้อน สามารถลดทอนสัญญาณรบกวนความถี่สูงได้มากขึ้นด้วยตัวกรองแยกที่เชื่อมต่อแบบอนุกรมกับตัวควบคุม PID โดยปกติแล้วจะใช้ตัวกรองอันดับสองที่มีฟังก์ชันถ่ายโอน เลือกค่าคงที่เวลาของตัวกรองเท่ากับ TF = Ti/N โดยที่ N = 2…20, Ti คือค่าคงที่การรวมของตัวควบคุม PID ไม่แนะนำให้เลือกความถี่ตัดของตัวกรองต่ำกว่าความถี่ 1/Ti เนื่องจากจะทำให้การคำนวณพารามิเตอร์ตัวควบคุมและระยะขอบของความเสถียรมีความซับซ้อน รูปที่ 1 - การใช้งานโครงสร้างของเงื่อนไขส่วนต่างของตัวควบคุม PID นอกจากเสียงแยกความแตกต่างแล้ว ประสิทธิภาพของตัวควบคุม PID ยังได้รับผลกระทบจากสัญญาณรบกวนในการวัดอีกด้วย ผ่านลูปป้อนกลับ เสียงเหล่านี้จะเข้าสู่อินพุตของระบบและปรากฏเป็นการกระจายตัวของตัวแปรควบคุม u เสียงความถี่สูงเป็นอันตรายเพราะทำให้เกิดการสึกหรออย่างรวดเร็วของข้อต่อท่อส่งและมอเตอร์ไฟฟ้า เนื่องจากวัตถุควบคุมมักจะเป็นตัวกรองความถี่ต่ำ เสียงการวัดจึงไม่ค่อยเดินทางผ่านลูปควบคุมไปยังเอาต์พุตของระบบ อย่างไรก็ตาม มันเพิ่มข้อผิดพลาดในการวัด y(t) และลดความถูกต้องของระเบียบข้อบังคับ ในตัวควบคุม PID สัญญาณรบกวนที่มีสเปกตรัมในบริเวณความถี่ต่ำซึ่งเกิดจากอิทธิพลภายนอกต่อวัตถุควบคุม และเสียงความถี่สูงที่เกี่ยวข้องกับการรบกวนทางแม่เหล็กไฟฟ้า สัญญาณรบกวนบนกำลังไฟฟ้าและบัสภาคพื้นดิน พร้อมสุ่มตัวอย่างสัญญาณที่วัดได้ และ เหตุผลอื่นมีความโดดเด่น สัญญาณรบกวนความถี่ต่ำถูกจำลองเป็นสัญญาณรบกวนภายนอก เสียงรบกวนความถี่สูงถูกจำลองเป็นสัญญาณรบกวนการวัด n(s) 1.3 Integral node ของตัวควบคุม PID ความอิ่มตัวเชิงปริพันธ์ ในสภาวะการทำงานที่คงที่และมีสิ่งรบกวนเล็กน้อย ระบบส่วนใหญ่ที่มีตัวควบคุม PID จะเป็นแบบเชิงเส้น อย่างไรก็ตาม กระบวนการเข้าสู่ระบอบการปกครองมักจะต้องคำนึงถึงความไม่เชิงเส้นของประเภท "ข้อจำกัด" ความไม่เป็นเชิงเส้นนี้เกิดจากข้อจำกัดตามธรรมชาติของกำลัง ความเร็ว รอบต่อนาที มุมของการหมุน พื้นที่หน้าตัดของวาล์ว ช่วงไดนามิก ฯลฯ ลูปควบคุมในระบบที่อยู่ในช่วงอิ่มตัว (เมื่อตัวแปรถึงขีดจำกัด) จะเปิดขึ้น เนื่องจากเมื่อตัวแปรที่อินพุตของลิงก์ที่มีขีดจำกัดเปลี่ยนแปลง ตัวแปรเอาต์พุตจะยังคงไม่เปลี่ยนแปลง การแสดงทั่วไปที่สุดของโหมดการจำกัดคือสิ่งที่เรียกว่า "ความอิ่มตัวเชิงบูรณาการ" ซึ่งเกิดขึ้นเมื่อระบบไปถึงโหมดในตัวควบคุมที่มีค่าคงที่การรวมตัวที่ไม่ใช่ศูนย์ Ti? 0. ความอิ่มตัวเชิงบูรณาการทำให้เกิดความล่าช้าในกระบวนการชั่วคราว (รูปที่ 2 และ 3) ผลกระทบที่คล้ายคลึงกันเกิดขึ้นเนื่องจากข้อจำกัดของเงื่อนไขตามสัดส่วนและปริพันธ์ของตัวควบคุม PID (รูปที่ 4 และ 5) อย่างไรก็ตาม ความอิ่มตัวเชิงปริพันธ์มักถูกเข้าใจว่าเป็นชุดของผลกระทบที่เกี่ยวข้องกับความไม่เชิงเส้นของประเภท "ข้อจำกัด" T 1= 0.1 วินาที; T2 =0.05 วินาที; L = 0.02 วินาที; เค = 2; Ti = 0.06 วินาที; Td = 0 รูปที่ 2 - การตอบสนองของตัวแปรเอาต์พุต y(t) ต่อการกระโดดในการดำเนินการอินพุต r(t) สำหรับตัวควบคุม PI ภายใต้เงื่อนไขของการจำกัดกำลังที่อินพุตของวัตถุ u(t) และไม่มีข้อจำกัด (วินาที สั่งซื้อวัตถุ) T1 = 0.1 วินาที; T2 = 0.05 วินาที; L = 0.02 วินาที; เค = 2; Ti = 0.06 วินาที; Td = 0 รูปที่ 3 - สัญญาณที่อินพุตของวัตถุ u(t) โดยมีและไม่มีข้อจำกัดด้านกำลัง (วัตถุลำดับที่สอง) เค = 10; Ti = 0.014 วินาที; Td = 0.3 วินาที; T1 = 0.1 วินาที; T2 = 0.05 วินาที; L = 0.02 s รูปที่ 4 - การตอบสนองของตัวแปรเอาต์พุต y(t) ต่อการกระโดดในการดำเนินการอินพุต r(t) สำหรับตัวควบคุม PID ภายใต้เงื่อนไขของการจำกัดกำลังที่อินพุตของวัตถุ u(t) และไม่จำกัด (วินาที สั่งซื้อวัตถุ) T1 = 0.1 วินาที; T2 = 0.05 วินาที; L = 0.02 วินาที; เค = 10; Ti = 0.014 วินาที; Td = 0.3 วินาที รูปที่ 5 - สัญญาณที่อินพุตของวัตถุ u(t) ในลูปกับตัวควบคุม PID ภายใต้เงื่อนไขของการจำกัดกำลังไฟฟ้าและไม่มี (วัตถุลำดับที่สอง) และลำดับที่สอง โดยที่ Kp คือสัมประสิทธิ์การถ่ายโอนในสถานะคงตัว T, T1, T2 - ค่าคงที่เวลา; L - การขนส่งล่าช้า สาระสำคัญของปัญหาความอิ่มตัวเชิงปริพันธ์คือถ้าสัญญาณที่อินพุตของวัตถุควบคุม u(t) เข้าสู่โซนความอิ่มตัว (จำกัด) และสัญญาณไม่ตรงกัน r(t) - y(t) ไม่เท่ากับ ศูนย์ ผู้รวมระบบยังคงรวมเข้าด้วยกัน กล่าวคือ สัญญาณจะเพิ่มขึ้นที่เอาต์พุต แต่สัญญาณนี้ไม่เข้าร่วมในกระบวนการควบคุมและไม่ส่งผลกระทบต่อวัตถุเนื่องจากเอฟเฟกต์ความอิ่มตัว ระบบควบคุมในกรณีนี้จะเทียบเท่ากับระบบเปิด ซึ่งสัญญาณอินพุตจะเท่ากับระดับความอิ่มตัวของสัญญาณควบคุม u(t) สำหรับระบบระบายความร้อน ขีดจำกัดล่างมักจะเป็นศูนย์พลังงานความร้อน ในขณะที่ตัวควบคุม PID ต้องการ "พลังงานความร้อนเชิงลบ" เพื่อนำไปใช้กับวัตถุ นั่นคือ ทำให้วัตถุเย็นลง ผลของความอิ่มตัวเชิงปริพันธ์เป็นที่ทราบกันมานานแล้ว ในตัวควบคุมแบบอะนาล็อกการกำจัดนั้นค่อนข้างยากเนื่องจากปัญหาไม่สามารถแก้ไขได้ด้วยอัลกอริธึม แต่ได้รับการแก้ไขโดยฮาร์ดแวร์เท่านั้น ด้วยการถือกำเนิดของไมโครโปรเซสเซอร์ ปัญหาสามารถแก้ไขได้อย่างมีประสิทธิภาพมากขึ้น วิธีการกำจัดความอิ่มตัวเชิงปริพันธ์มักเป็นเรื่องของการประดิษฐ์ ซึ่งเป็นความลับทางการค้าของบริษัทผู้ผลิต และได้รับการคุ้มครองโดยสิทธิบัตร การจำกัดอัตราการฆ่าของการดำเนินการอินพุต เนื่องจากค่าสูงสุดของการดำเนินการอินพุตบนวัตถุควบคุม u(t) ลดลงเมื่อความแตกต่าง r(t) - y(t) ลดลง เพื่อลดผลกระทบจากข้อจำกัด คุณจึงสามารถลดอัตราการฆ่าของสัญญาณตั้งค่าได้ r(t) เช่น การใช้ตัวกรอง ข้อเสียของวิธีนี้คือความเร็วของระบบลดลง รวมถึงการไม่สามารถขจัดความอิ่มตัวของสีที่เกิดจากการรบกวนจากภายนอกได้ และไม่ได้เกิดจากสัญญาณตั้งค่า เมื่อการควบคุมบนวัตถุถึงระดับความอิ่มตัว การตอบสนองจะขาดและส่วนประกอบที่เป็นส่วนประกอบยังคงเพิ่มขึ้น แม้ว่าจะควรจะลดลงโดยที่ไม่มีความอิ่มตัวก็ตาม ดังนั้น หนึ่งในวิธีการกำจัดความอิ่มตัวของอินทิกรัลก็คือ คอนโทรลเลอร์จะตรวจสอบขนาดของการดำเนินการควบคุมบนวัตถุ และทันทีที่ถึงระดับอิ่มตัว คอนโทรลเลอร์จะเข้าสู่ข้อห้ามซอฟต์แวร์ในการรวมส่วนประกอบอินทิกรัล การชดเชยความอิ่มตัวพร้อมข้อเสนอแนะเพิ่มเติม ผลกระทบของความอิ่มตัวเชิงบูรณาการสามารถลดลงได้โดยการตรวจสอบสถานะของแอคทูเอเตอร์ที่เข้าสู่ความอิ่มตัวและชดเชยสัญญาณที่ใช้กับอินพุตของผู้รวมระบบ โครงสร้างของระบบที่มีตัวชดเชยดังแสดงในรูปที่ 6 รูปที่ 6 - การชดเชยผลกระทบของความอิ่มตัวเชิงบูรณาการด้วยความช่วยเหลือของข้อเสนอแนะเพิ่มเติมสำหรับการส่งสัญญาณข้อผิดพลาด es ไปยังอินพุตของผู้รวมระบบ หลักการทำงานมีดังนี้ ระบบจะสร้างสัญญาณที่ไม่ตรงกันระหว่างอินพุตและเอาต์พุตของแอคทูเอเตอร์ es = u - v สัญญาณที่เอาต์พุตของแอคทูเอเตอร์วัดหรือคำนวณโดยใช้แบบจำลองทางคณิตศาสตร์ (รูปที่ 6) ถ้า es = 0 จะเท่ากับไม่มีตัวชดเชย และเราจะได้ตัวควบคุม PID ปกติ ถ้า อุปกรณ์บริหารอิ่มตัว แล้ว v > u และ es< 0. При этом сигнал на входе интегратора уменьшается на величину ошибки es, что приводит к замедлению роста сигнала на выходе интегратора, уменьшению сигнала рассогласования и величины выброса на переходной характеристике системы (рисунки 7 и 8). Постоянная времени Ts определяет степень компенсации сигнала рассогласования. รูปที่ 7 - การตอบสนองของระบบต่อการกระโดดครั้งเดียว r(t) สำหรับค่าต่าง ๆ ของค่าคงที่เวลา Ts เค = 7; Ti = 0.01 วินาที; Td = 0.1 วินาที; T1 = 0.1 วินาที; T2 = 0.05 วินาที; L = 0.01 s รูปที่ 8 - การตอบสนองของระบบต่อสัญญาณข้อผิดพลาด es (อ็อบเจ็กต์อันดับสอง พารามิเตอร์คอนโทรลเลอร์: ในตัวควบคุมบางตัว อินพุต u ของอุปกรณ์เปรียบเทียบ es จะถูกแยกออกเป็นอินพุตแยกต่างหาก - "อินพุตติดตาม" ซึ่งสะดวกเมื่อสร้างระบบควบคุมที่ซับซ้อนและเมื่อเรียงตัวควบคุมหลายตัว การรวมแบบมีเงื่อนไข วิธีนี้เป็นลักษณะทั่วไปของการห้ามการรวมอัลกอริทึม หลังจากเริ่มมีข้อห้าม องค์ประกอบที่ครบถ้วนจะคงที่ ในระดับเดียวกับที่ข้อห้ามในการบูรณาการปรากฏขึ้น ลักษณะทั่วไปคือการห้ามการรวมเกิดขึ้นไม่เพียงเมื่อถึงความอิ่มตัว แต่ยังอยู่ภายใต้เงื่อนไขอื่น ๆ เงื่อนไขดังกล่าวอาจเป็นได้ ตัวอย่างเช่น ความสำเร็จโดยสัญญาณข้อผิดพลาด e หรือตัวแปรเอาต์พุต y ของค่าที่ระบุ เมื่อปิดกระบวนการรวมระบบ จำเป็นต้องตรวจสอบสถานะของผู้รวมระบบในขณะที่ปิดการทำงาน หากมีข้อผิดพลาดสะสมและระดับความอิ่มตัวเพิ่มขึ้น การผสานการทำงานจะปิดลง หากในขณะที่ปิดเครื่อง ระดับของความอิ่มตัวลดลง แสดงว่าผู้รวมระบบเปิดทิ้งไว้ รูปที่ 9 แสดงตัวอย่างของกระบวนการชั่วคราวในระบบที่ตัวรวมระบบปิดอยู่เมื่อค่าเอาต์พุต y(t) ถึงค่าที่กำหนด (y = 0, y = 0.2, y = 0.8) รูปที่ 9 - การตอบสนองต่อกระโดดเดียว r(t) ของระบบที่มีความอิ่มตัวของแอคชูเอเตอร์ที่ระดับการปิดตัวรวมต่างๆ y Integrator ที่มีข้อจำกัด มีการนำเสนอรูปแบบการใช้งานคอนโทรลเลอร์ PI โดยใช้ผู้รวมระบบในลูปป้อนกลับ หากวงจรนี้เสริมด้วยลิมิตเตอร์ (รูปที่ 10) สัญญาณ u ที่เอาต์พุตจะไม่เกินขีดจำกัดที่กำหนดโดยขีดจำกัดลิมิตเตอร์ ซึ่งจะช่วยลดการโอเวอร์โหลดในการตอบสนองชั่วคราวของระบบ (รูปที่ 12) รูปที่ 11 แสดงการดัดแปลงของลิมิตเตอร์ดังกล่าว โมเดลของเอฟเฟกต์คลิปสามารถปรับปรุงได้หากหลังจากเกินระดับที่เกิดคลิปหนีบ สัญญาณที่เอาต์พุตของโมเดลลดลง (รูปที่ 13) สิ่งนี้จะช่วยเร่งการฟื้นตัวของระบบจากโหมดอิ่มตัว รูปที่ 10 - การปรับเปลี่ยนผู้รวมระบบด้วยตัว จำกัด (แบบขนาน) รูปที่ 11 - การดัดแปลงผู้รวมระบบด้วยตัว จำกัด (ในซีรีย์) รูปที่ 12 - การตอบสนองต่อกระโดดเดียว r(t) ของระบบที่มี ผู้รวมระบบที่มีข้อจำกัดบน Uup รูปที่ 13 - ปรับปรุงฟังก์ชันการถ่ายโอนของแบบจำลองเอฟเฟกต์การตัดต่อ 1.4 ขอบของความเสถียรของระบบ เกณฑ์ Nyquist ความเป็นไปได้ที่จะสูญเสียความเสถียรเป็นข้อเสียเปรียบหลักของระบบป้อนกลับ ดังนั้น การทำให้มั่นใจถึงความเสถียรที่จำเป็นจึงเป็นขั้นตอนที่สำคัญที่สุดในการพัฒนาและปรับแต่งตัวควบคุม PID ความเสถียรของระบบที่มีตัวควบคุม PID คือความสามารถของระบบในการกลับไปติดตามค่าที่ตั้งไว้หลังจากสิ้นสุดอิทธิพลภายนอก ในบริบทของคำจำกัดความนี้ อิทธิพลภายนอกไม่ได้หมายถึงการรบกวนภายนอกที่กระทำต่อวัตถุเท่านั้น แต่ยังหมายถึงการรบกวนใดๆ ที่กระทำต่อส่วนใดส่วนหนึ่งของระบบปิด ซึ่งรวมถึงสัญญาณรบกวนในการวัด ความไม่เสถียรของจุดตั้งค่าชั่วคราว เสียงสุ่มตัวอย่างและการหาปริมาณ สัญญาณรบกวน และข้อผิดพลาดในการคำนวณ การรบกวนทั้งหมดนี้ทำให้เกิดการเบี่ยงเบนของระบบจากตำแหน่งสมดุล ถ้า หลังจากสิ้นสุดอิทธิพล ระบบจะกลับสู่ตำแหน่งสมดุล จากนั้นถือว่าเสถียร เมื่อวิเคราะห์ความเสถียรของตัวควบคุม PID มักจะจำกัดให้ศึกษาการตอบสนองของระบบต่อการเปลี่ยนแปลงขั้นตอนในเซ็ตพอยต์ r(t) เสียงการวัด n(t) และการรบกวนจากภายนอก d(t) การสูญเสียความเสถียรปรากฏเป็นการเพิ่มตัวแปรควบคุมของวัตถุอย่างไม่จำกัดหรือการแกว่งของวัตถุด้วยแอมพลิจูดที่เพิ่มขึ้น ในสภาวะการผลิต ความพยายามที่จะบรรลุความเสถียรของระบบด้วยตัวควบคุม PID อย่างสังเกตได้ โดยไม่ต้องระบุตัวตน ไม่ได้นำไปสู่ความสำเร็จเสมอไป (ประการแรก การดำเนินการนี้ใช้กับระบบที่มีออบเจ็กต์ระดับสูงหรือออบเจ็กต์ที่ยากต่อการระบุ รวมทั้งระบบขนส่งที่มีความล่าช้ามาก) ดูเหมือนว่าความมั่นคงเป็นสมบัติลึกลับที่ไม่สามารถควบคุมได้ตลอดเวลา อย่างไรก็ตาม หากระบุกระบวนการได้อย่างแม่นยำเพียงพอ ไสยศาสตร์ก็หายไปและการวิเคราะห์เสถียรภาพจะลดลงเหลือเพียงการวิเคราะห์สมการเชิงอนุพันธ์ที่อธิบายลูปปิดที่มีการป้อนกลับ สิ่งที่น่าสนใจในทางปฏิบัติคือการวิเคราะห์ระยะขอบความมั่นคง นั่นคือการกำหนดค่าตัวเลขของเกณฑ์ที่ช่วยให้คุณระบุว่าระบบอยู่ไกลจากสถานะของความไม่เสถียรเพียงใด ข้อมูลที่สมบูรณ์ที่สุดเกี่ยวกับระยะขอบความเสถียรของระบบสามารถรับได้โดยการแก้สมการเชิงอนุพันธ์ที่อธิบายระบบปิดภายใต้การรบกวนจากภายนอก อย่างไรก็ตาม กระบวนการนี้ใช้เวลานานเกินไป ดังนั้น สำหรับระบบเชิงเส้นตรง วิธีการแบบง่ายจึงถูกใช้เพื่อประเมินขอบความเสถียรโดยไม่ต้องแก้สมการ เราจะพิจารณาวิธีการประมาณค่าสองวิธี: การใช้โฮโดกราฟของการตอบสนองความถี่ open-loop ที่ซับซ้อน (เกณฑ์ Nyquist) และใช้การตอบสนองความถี่ลอการิทึมและการตอบสนองต่อเฟส (แผนภาพเป็นลางบอกเหตุ) ระบบที่เสถียรอาจไม่เสถียรเมื่อมีการเปลี่ยนแปลงพารามิเตอร์เล็กน้อย เช่น เนื่องจากการกระจายทางเทคโนโลยี ดังนั้น ต่อไป เราจะวิเคราะห์ฟังก์ชันความไวของระบบด้วยตัวควบคุม PID ซึ่งช่วยให้เราระบุสภาวะที่ระบบมีความหยาบ (ไม่ไวต่อการเปลี่ยนแปลงของพารามิเตอร์) ระบบที่รักษาระยะขอบเสถียรภาพที่กำหนดตลอดช่วงการเปลี่ยนแปลงพารามิเตอร์ทั้งหมดเนื่องจากความผันแปรทางเทคโนโลยี อายุ สภาพการทำงาน การเปลี่ยนแปลงพารามิเตอร์โหลดตลอดช่วงทั้งหมด ตลอดจนช่วงการรบกวนทั้งหมดที่กระทำต่อระบบจริง สภาพการทำงานเรียกว่ามีความแข็งแกร่ง บางครั้งความเข้มแข็งและความหยาบคายก็ถูกใช้เป็นแนวคิดที่เทียบเท่ากัน เกณฑ์ Nyquist พิจารณาระบบที่ประกอบด้วยตัวควบคุม R และวัตถุควบคุม P (รูปที่ 14) ซึ่งได้มาจากการกำจัดวงจรสัญญาณตั้งค่าออกจากระบบคลาสสิกที่มีตัวควบคุม PID เราจะถือว่าข้อเสนอแนะเปิดอยู่และเพื่อปิดมันก็เพียงพอแล้วที่จะเชื่อมต่อจุด x และ y ให้เราสมมติว่าอินพุต x ได้รับสัญญาณ จากนั้นเมื่อผ่านตัวควบคุมและวัตถุควบคุมแล้ว สัญญาณนี้จะปรากฏที่เอาต์พุต y พร้อมแอมพลิจูดและเฟสที่เปลี่ยนแปลงในรูปแบบ: y(t) = ? |G(jw0)|บาป(w0t + ?), (4) โดยที่ G(jsh) = R(jsh)P(jsh) คือการตอบสนองความถี่ที่ซับซ้อน (CFC) ของระบบ ? = arg(G(jш0)) - อาร์กิวเมนต์ CCH |G(jш0)| - โมดูล CFC ที่ความถี่ w0 ดังนั้นเมื่อผ่านตัวควบคุมและวัตถุ แอมพลิจูดของสัญญาณจะเปลี่ยนตามสัดส่วนของโมดูลัสและเฟส - โดยค่าของอาร์กิวเมนต์ CFC รูปที่ 14 - โครงสร้างของระบบควบคุมแบบ open-loop พร้อมตัวควบคุม PID สำหรับการวิเคราะห์ความเสถียร หากตอนนี้เราปิดจุด x และ y แล้ว สัญญาณจะหมุนเวียนเป็นวงปิด และเป็นไปตามเงื่อนไข y(t) = x(t) ถ้า นอกจากนี้ |G(jш0)| ? 1 และ? \u003d 180 °นั่นคือหลังจากผ่านลูปสัญญาณจะเข้าสู่อินพุตคอนโทรลเลอร์ในเฟสเดียวกับในรอบก่อนหน้าจากนั้นหลังจากผ่านลูปแต่ละครั้งแอมพลิจูดของสัญญาณไซน์จะเพิ่มขึ้นจนกว่าจะถึง ขอบเขตของพิสัยลิเนียริตี้ของระบบ หลังจากนั้นรูปร่างการสั่นจะแตกต่างจากไซน์ ในกรณีนี้ สามารถใช้วิธีการลิเนียร์ไลเซชันฮาร์โมนิกเพื่อวิเคราะห์ความเสถียร เมื่อพิจารณาเฉพาะฮาร์มอนิกแรกของสัญญาณที่บิดเบี้ยวเท่านั้น ในสภาวะคงตัว หลังจากที่แอมพลิจูดการแกว่งถูกจำกัด เนื่องจากความเท่าเทียมกัน y(t) = x(t) จะเป็นไปตามเงื่อนไขต่อไปนี้: |G(jw0)|=1 เช่น G(jw0)= - 1 (5) โดยการแก้สมการ G(jw0) = -1 คุณจะพบความถี่ของการแกว่ง w0 ในระบบปิด การตอบสนองความถี่ที่ซับซ้อน G(jш) แสดงเป็นภาพกราฟิกในรูปแบบของโฮโดกราฟ (แผนภาพ Nyquist) - กราฟในพิกัด Re และ Im (รูปที่ 15) ลูกศรบนเส้นโฮโดกราฟแสดงทิศทางการเคลื่อนที่ของ "ดินสอ" ด้วยความถี่ที่เพิ่มขึ้น จุด G(jw0) = -1 ซึ่งสอดคล้องกับเงื่อนไขสำหรับการมีอยู่ของการแกว่งตัวที่ไม่มีการดัดแปลงในระบบ บนกราฟนี้มีพิกัด Re = -1 และ Im = 0 ดังนั้น เกณฑ์ความเสถียรของ Nyquist จึงมีสูตรดังนี้ : วงจรที่เสถียรในสถานะเปิดจะยังคงเสถียรและหลังจากปิดแล้ว หาก CFC ในสถานะเปิดไม่ครอบคลุมจุดด้วยพิกัด [-1, j0] เมื่อเคลื่อนที่ไปตามวิถีโฮโดกราฟในทิศทางของความถี่ที่เพิ่มขึ้น จุด [-1, j0] จะต้องอยู่ทางด้านซ้ายเพื่อให้วงปิดมีเสถียรภาพ เค=6; T1 = T2 = 0.1 วินาที; L = 0.01 s รูปที่ 15 - ภาพสามมิติของ CFC ของระบบเปิด G(jw) สำหรับวัตถุอันดับสอง รูปที่ 16 แสดงการตอบสนองของระบบปิดที่มี hodographs ต่างกันสามแบบ (รูปที่ 15) ต่อ setpoint step เดียว ในทั้งสามกรณี ระบบมีความเสถียร แต่อัตราการหน่วงของการสั่นและรูปร่างของการเปลี่ยนแปลง กระบวนการของพวกเขาแตกต่างกัน เป็นที่ชัดเจนโดยสัญชาตญาณว่าระบบที่มีพารามิเตอร์ Ti = 0.01 s, Td = 0.1 s นั้นใกล้เคียงที่สุดที่จะเข้าสู่สถานะของการแกว่งตัวที่ไม่มีการหน่วงโดยมีการเปลี่ยนแปลงเล็กน้อยในพารามิเตอร์ นั่นเป็นเหตุผลที่ เมื่อออกแบบตัวควบคุม PID สิ่งสำคัญคือต้องแน่ใจว่าไม่มีความเสถียรมากเท่ากับกำลังสำรอง ซึ่งจำเป็นสำหรับการทำงานปกติของระบบในสภาพจริง ค่าความคงตัวประมาณเป็นระดับความห่างไกลของ CFC จากจุดวิกฤต [-1, j0] ถ้า |G(jш0)|< 1, то можно найти, во сколько раз осталось увеличить передаточную функцию, чтобы результирующее усиление вывело систему в колебательный режим: gm|G(jщ0)| = 1, откуда อัตรากำไรขั้นต้น gm คือค่าโดยที่ฟังก์ชันการถ่ายโอนของระบบ open-loop G(jsh180) จะต้องคูณเพื่อให้โมดูลที่ความถี่กะเฟส 180 ° (sh180) เท่ากับ 1 ถ้าที่ความถี่ w180 open loop gain คือ G(jsh180) = -1/gm (รูปที่ 15) จากนั้น gain เพิ่มเติมของ gm จะทำให้ระบบถึงจุด [-1, j0] เนื่องจาก (-1/gm) gm = -1. แนวความคิดของระยะขอบถูกนำมาใช้ในทำนองเดียวกัน: นี่คือค่าต่ำสุด m โดยที่จำเป็นต้องเพิ่มการเลื่อนเฟสในระบบเปิด arg(G(jw)) เพื่อให้การเปลี่ยนเฟสทั้งหมดถึง 180° นั่นคือ เครื่องหมาย “+” ก่อน arg(G(jш1)) เป็นเพราะ arg(G(jш1))< 0. Для оценки запаса устойчивости используют также минимальное расстояние sm от кривой годографа до точки [-1, j0] (рисунок 15). ในทางปฏิบัติ ค่า gm = 2...5,m = 30...60°, sm = 0.5...0.8 ถือว่ายอมรับได้ สำหรับกราฟในรูปที่ 15 เกณฑ์เหล่านี้มีค่าต่อไปนี้: Gm1 = 12.1; m1 = 15°; sm1 = 0.303 (สำหรับกรณี Ti = 0.01 s, Gm2 = 11.8; m2 = 47.6°; sm2 = 0.663 (สำหรับกรณี Ti = 0.05 s, Gm3 = 1.5; ลบ.ม. = 35.2°; sm3 = 0.251 (สำหรับกรณี Ti = 0.05 s, หากเส้นโค้งโฮโดกราฟตัดกับแกนจริงหลายจุด ดังนั้นในการประเมินระยะขอบเสถียรภาพ ให้หาเส้นที่ใกล้กับจุด [-1, j0] มากที่สุด ด้วยโฮโดกราฟที่ซับซ้อนมากขึ้น สามารถใช้ค่าประมาณของระยะขอบเสถียรภาพเป็นระยะขอบล่าช้าได้ ระยะขอบล่าช้าคือความล่าช้าขั้นต่ำที่เพิ่มไปยังลูปเพื่อทำให้ไม่เสถียร ส่วนใหญ่แล้ว เกณฑ์นี้ใช้เพื่อประเมินขอบความเสถียรของระบบด้วยตัวทำนาย Smith เกณฑ์ความเสถียรของความถี่ สำหรับการแสดงกราฟิกของฟังก์ชันการถ่ายโอนของระบบเปิดและการประเมินขอบความเสถียร สามารถใช้การตอบสนองต่อความถี่ลอการิทึมและการตอบสนองต่อเฟส (รูปที่ 17) ในการประเมินระยะขอบของเฟส ขั้นแรก โดยใช้การตอบสนองความถี่ จะพบความถี่ u1 (ความถี่คัตออฟ หรือความถี่เกนเอกภาพ) ซึ่ง G(ju1) = 1 จากนั้นจะพบระยะขอบเฟสที่สอดคล้องกันจาก PFC ในการประมาณค่าเกนมาร์จิ้น ขั้นแรก ให้ใช้ PFC หาความถี่ w180 ซึ่งเฟสชิฟต์คือ 180 ° จากนั้นหาเกนมาร์จิ้นจากการตอบสนองความถี่ รูปที่ 17 แสดงตัวอย่างการสร้างแบบกราฟิกสำหรับการประมาณค่าเกนและระยะขอบสำหรับระบบ ซึ่งโฮโดกราฟแสดงไว้ในรูปที่ 15 หากระยะขอบเฟสลูปเปิดเป็น 0 ° หรือระยะขอบเกนเป็น 1 ระบบจะไม่เสถียรหลังจากปิดลูปป้อนกลับ รูปที่ 16 - การตอบสนองชั่วคราวของระบบปิดซึ่ง มีโฮโดกราฟแสดงในรูปที่15 2. ฟังก์ชั่นความไว สมการตัวควบคุม PID แบบดิจิตอล 2.1 ฟังก์ชันความไว ความทนทาน การสลับโหมดการควบคุมแบบไม่กระแทก ฟังก์ชั่นการถ่ายโอนของวัตถุจริง P สามารถเปลี่ยนแปลงได้ระหว่างการทำงานโดยค่า DP ตัวอย่างเช่น เนื่องจากการเปลี่ยนแปลงของภาระบนเพลามอเตอร์ จำนวนไข่ในตู้ฟักไข่ ระดับหรือองค์ประกอบของ ของเหลวในหม้อนึ่งความดันเนื่องจากอายุและการสึกหรอของวัสดุ ลักษณะของฟันเฟือง การเปลี่ยนแปลงการหล่อลื่น ฯลฯ ระบบควบคุมอัตโนมัติที่ออกแบบอย่างเหมาะสมควรคงไว้ซึ่งตัวบ่งชี้คุณภาพ ไม่เพียงแต่ในสภาวะที่เหมาะสมเท่านั้น แต่ยังรวมถึงปัจจัยที่เป็นอันตรายที่ระบุไว้ด้วย เพื่อประเมินอิทธิพลของการเปลี่ยนแปลงสัมพัทธ์ในฟังก์ชันการถ่ายโอนของวัตถุ DP / P ต่อฟังก์ชันการถ่ายโอนของระบบปิด Gcl y(s) = r(s), Gcl(s) = (8) ค้นหาส่วนต่าง dGcl: หารทั้งสองข้างของความเท่าเทียมกันนี้ด้วย Gcl และแทน Gcl = PR/(1+PR) ลงในด้านขวา เราจะได้: รูปที่ 17 - การประเมินกำไรและระยะขอบสำหรับระบบที่มีโฮโดกราฟแสดงในรูปที่ 15 จาก (10) ความหมายของสัมประสิทธิ์ S มองเห็นได้ - มันแสดงลักษณะระดับของอิทธิพลของการเปลี่ยนแปลงสัมพัทธ์ในฟังก์ชันการถ่ายโอนของวัตถุต่อการเปลี่ยนแปลงสัมพัทธ์ในฟังก์ชันการถ่ายโอนของวงปิดนั่นคือ S คือสัมประสิทธิ์ ของความไวของวงปิดต่อการเปลี่ยนแปลงในฟังก์ชันการถ่ายโอนของวัตถุ เนื่องจากค่าสัมประสิทธิ์ S \u003d S (jsh) ขึ้นอยู่กับความถี่ จึงเรียกว่าฟังก์ชันความไว ดังต่อไปนี้จาก (10) มาแนะนำสัญกรณ์: ค่า T เรียกว่าฟังก์ชันความไวเสริม (เพิ่มเติม) เนื่องจาก S + T = 1 ฟังก์ชันความไวช่วยให้คุณประเมินการเปลี่ยนแปลงในคุณสมบัติของระบบได้หลังจากปิดการป้อนกลับ เนื่องจากฟังก์ชันการถ่ายโอนของระบบเปิดมีค่าเท่ากับ G = PR และของระบบปิด Gcl = PR/(1+PR) ดังนั้นอัตราส่วนของมันคือ Gcl/G = S ในทำนองเดียวกัน สำหรับระบบเปิด ฟังก์ชันการถ่ายโอน จากอินพุตของการรบกวน d ถึงเอาต์พุตของระบบปิดคือ (ดู ) P(s)/(1 + P(s)R(s)) และ open-loop คือ P ดังนั้นอัตราส่วนของพวกมันก็เช่นกัน S. สำหรับฟังก์ชันการถ่ายโอนจากอินพุตสัญญาณรบกวนการวัด n ไปยังเอาต์พุตของระบบ สามารถรับอัตราส่วนเดียวกันได้ S ดังนั้น เมื่อทราบรูปแบบของฟังก์ชัน S(jw) (เช่น รูปที่ 18) เราสามารถพูดได้ว่าการปราบปรามอิทธิพลภายนอกที่มีต่อระบบจะเปลี่ยนไปอย่างไรสำหรับความถี่ต่างๆ หลังจากปิดลูปป้อนกลับ เห็นได้ชัดว่าเสียงอยู่ในช่วงความถี่ที่ |S(jш)| > 1 หลังจากปิดข้อเสนอแนะจะเพิ่มขึ้นและเสียงรบกวนด้วยความถี่ที่ |S(jш)|< 1, после замыкания обратной связи будут ослаблены. กรณีที่เลวร้ายที่สุด (การขยายอิทธิพลภายนอกมากที่สุด) จะถูกสังเกตที่ความถี่สูงสุด Ms ของโมดูลัสของฟังก์ชันความไว (รูปที่ 18): ฟังก์ชันความไวสูงสุดสามารถสัมพันธ์กับระยะขอบเสถียรภาพ sm (รูปที่ 15) สำหรับสิ่งนี้ เราให้ความสำคัญกับความจริงที่ว่า |1 + G(jш)| แทนระยะทางจากจุด [-1, j0] ถึงจุดปัจจุบันบนโฮโดกราฟของฟังก์ชัน G(jш) ดังนั้น ระยะทางต่ำสุดจากจุด [-1, j0] ถึง ฟังก์ชัน G(jш) เท่ากับ: เปรียบเทียบ (13) และ (14) เราสามารถสรุปได้ว่า sm = 1/Ms หากโมดูล G(jsh) ลดลงตามความถี่ที่เพิ่มขึ้น ดังจะเห็นได้จากรูปที่ 15 (1-sm) ? 1/กรัม แทนที่อัตราส่วน sm = 1/Ms เราจะได้ค่าประมาณของอัตรากำไรที่แสดงในแง่ของค่าสูงสุดของฟังก์ชันความไว: ในทำนองเดียวกัน แต่ด้วยสมมติฐานที่หยาบกว่านี้ เราสามารถเขียนการประมาณระยะขอบเฟสในแง่ของฟังก์ชันความไวสูงสุด : ตัวอย่างเช่น สำหรับ Ms = 2 เราจะได้ gm ? 2 และ? 29° รูปที่ 18 - ฟังก์ชันความไวสำหรับระบบที่มีโฮโดกราฟแสดงในรูปที่ 13 ความทนทานคือความสามารถของระบบในการรักษาระยะขอบเสถียรภาพที่กำหนดโดยแปรผันในพารามิเตอร์ที่เกิดจากการเปลี่ยนแปลงของโหลด (ตัวอย่างเช่น เมื่อโหลดของเตาหลอมเปลี่ยนแปลง ค่าคงที่ของเวลาจะเปลี่ยนไป) การแพร่กระจายของพารามิเตอร์ทางเทคโนโลยีและอายุ อิทธิพลภายนอก ข้อผิดพลาดในการคำนวณและข้อผิดพลาดของแบบจำลองวัตถุ เมื่อใช้แนวคิดเรื่องความไว เราสามารถพูดได้ว่าความทนทานคือความไวต่ำของขอบความเสถียรต่อการเปลี่ยนแปลงในพารามิเตอร์ของวัตถุ หากพารามิเตอร์ของวัตถุเปลี่ยนแปลงภายในขอบเขตเล็ก ๆ เมื่อเป็นไปได้ที่จะใช้การแทนที่ส่วนต่างด้วยการเพิ่มขึ้นอย่าง จำกัด ผลกระทบของการเปลี่ยนแปลงในพารามิเตอร์ของวัตถุในฟังก์ชั่นการถ่ายโอนของระบบปิดสามารถประมาณได้โดยใช้ ฟังก์ชันความไว (10) โดยเฉพาะอย่างยิ่ง สามารถสรุปได้ว่าที่ความถี่เหล่านั้นซึ่งโมดูลัสของฟังก์ชันความไวมีขนาดเล็ก ผลกระทบของการเปลี่ยนแปลงพารามิเตอร์ของวัตถุต่อฟังก์ชันการถ่ายโอนของระบบปิด และดังนั้น บนขอบความเสถียรจะมีน้อย เพื่อประเมินผลกระทบของการเปลี่ยนแปลงขนาดใหญ่ในพารามิเตอร์ของวัตถุ เราแสดงฟังก์ชันการถ่ายโอนของวัตถุในรูปแบบของคำสองคำ: P = P0 + DP (17) โดยที่ P0 คือฟังก์ชันการถ่ายโอนที่คำนวณได้ DP คือค่าเบี่ยงเบนจาก P0 ซึ่งต้องเป็นฟังก์ชันการถ่ายโอนที่เสถียร จากนั้นลูปเกนของระบบเปิดสามารถแสดงเป็น G = RP0 + RDP = G0 + RDP เนื่องจากระยะทางจากจุด [-1, j0] ถึงจุดปัจจุบัน A บนโฮโดกราฟของระบบที่ไม่ถูกรบกวน (ซึ่ง DP = 0) เท่ากับ |1 + G0| (รูปที่ 19) สภาวะความเสถียรสำหรับระบบที่มีการเบี่ยงเบนเกนของลูป RDP สามารถแสดงเป็น: |RDP|< |1+G0|, โดยที่ T คือฟังก์ชันความไวเพิ่มเติม (12) สุดท้ายเราสามารถเขียนอัตราส่วน: ซึ่งต้องดำเนินการเพื่อให้ระบบมีเสถียรภาพเมื่อพารามิเตอร์กระบวนการเปลี่ยนแปลงตามค่าของ DP(jsh) การลดศูนย์และเสา เนื่องจากฟังก์ชันการถ่ายโอนแบบวงเปิด G = RP เป็นผลคูณของฟังก์ชันการถ่ายโอนสองฟังก์ชัน ซึ่งใน กรณีทั่วไปมีทั้งตัวเศษและตัวส่วน จึงสามารถยกเลิกขั้วที่อยู่ในครึ่งระนาบขวาหรืออยู่ใกล้มันได้ เนื่องจากในสภาพจริง เมื่อมีการแพร่กระจายของพารามิเตอร์ การลดลงดังกล่าวจะดำเนินการอย่างไม่ถูกต้อง สถานการณ์อาจเกิดขึ้นเมื่อการวิเคราะห์เชิงทฤษฎีนำไปสู่ข้อสรุปว่าระบบมีเสถียรภาพ แม้ว่าในความเป็นจริง จะมีความเบี่ยงเบนเล็กน้อยของพารามิเตอร์กระบวนการ จากค่าที่คำนวณได้จะไม่เสถียร ดังนั้นทุกครั้งที่เสาลดลง จำเป็นต้องตรวจสอบความเสถียรของระบบด้วยการกระจัดกระจายของพารามิเตอร์ของวัตถุจริง รูปที่ 19 - คำอธิบายที่มาของอัตราส่วน (18) ผลกระทบประการที่สองของการทำให้ขั้วสั้นลงคือการปรากฏตัวของความแตกต่างอย่างมีนัยสำคัญระหว่างเวลาการตกตะกอนของกระบวนการชั่วคราวในระบบปิดภายใต้อิทธิพลของสัญญาณตั้งค่าและการรบกวนจากภายนอก ดังนั้นจึงจำเป็นต้องตรวจสอบการตอบสนองของคอนโทรลเลอร์ที่สังเคราะห์ขึ้นภายใต้อิทธิพลของสัญญาณที่ตั้งค่าไว้ไม่เพียงเท่านั้น แต่ยังรวมถึงการรบกวนจากภายนอกด้วย การสลับโหมดการควบคุมแบบไม่กระแทก ในตัวควบคุม PID อาจมีโหมดเมื่อพารามิเตอร์เปลี่ยนแปลงอย่างกะทันหัน ตัวอย่างเช่น เมื่อจำเป็นต้องเปลี่ยนค่าคงที่การรวมในระบบที่ทำงานอยู่ หรือเมื่อหลังจากการควบคุมระบบด้วยตนเอง จำเป็นต้องเปลี่ยนเป็นโหมดอัตโนมัติ ในกรณีที่อธิบายไว้ ตัวแปรควบคุมเกินพิกัดที่ไม่ต้องการอาจเกิดขึ้นหากไม่มีมาตรการพิเศษ ดังนั้น ปัญหาที่เกิดขึ้นจากการสลับโหมดการทำงานหรือพารามิเตอร์คอนโทรลเลอร์อย่างราบรื่น ("ไม่ช็อต") วิธีการหลักในการแก้ปัญหาคือการสร้างโครงสร้างตัวควบคุมดังกล่าว เมื่อทำการเปลี่ยนแปลงพารามิเตอร์ก่อนขั้นตอนการรวม ตัวอย่างเช่น ด้วยพารามิเตอร์ที่เปลี่ยนแปลง Ti = Ti (t) พจน์ปริพันธ์สามารถเขียนได้สองรูปแบบ: ผม(t) = หรือ ผม(t) = . ในกรณีแรก เมื่อ Ti (t) เปลี่ยนแปลงอย่างกะทันหัน พจน์ของปริพันธ์จะเปลี่ยนไปอย่างกะทันหัน ในกรณีที่สอง มันจะเปลี่ยนแปลงอย่างราบรื่น เนื่องจาก Ti (t) อยู่ภายใต้เครื่องหมายปริพันธ์ ค่าที่ไม่สามารถเปลี่ยนแปลงได้ในทันที วิธีการที่คล้ายกันนี้ถูกนำมาใช้ในรูปแบบส่วนเพิ่มของตัวควบคุม PID (ดูหัวข้อ "รูปแบบที่เพิ่มขึ้นของตัวควบคุม PID แบบดิจิทัล") และในรูปแบบอนุกรมของตัวควบคุม PID โดยที่การรวมจะดำเนินการในขั้นตอนสุดท้ายของการคำนวณการควบคุม 2.2 รูปแบบตัวควบคุมแบบไม่ต่อเนื่อง สมการตัวควบคุม Digital PID ตัวแปรต่อเนื่องสะดวกต่อการวิเคราะห์และสังเคราะห์ตัวควบคุม PID สำหรับการใช้งานทางเทคนิค จำเป็นต้องเปลี่ยนไปใช้สมการแบบแยกส่วน เนื่องจากพื้นฐานของคอนโทรลเลอร์ทั้งหมดคือไมโครคอนโทรลเลอร์ คอนโทรลเลอร์ หรือคอมพิวเตอร์ที่ทำงานกับตัวแปรที่ได้รับจากสัญญาณแอนะล็อกหลังจากการควอนไทซ์เวลาและการสุ่มตัวอย่างระดับ เนื่องจากเวลาจำกัดในการคำนวณการดำเนินการควบคุมในไมโครคอนโทรลเลอร์และความล่าช้าในการแปลงแอนะล็อกเป็นดิจิทัลระหว่างช่วงเวลาที่สัญญาณแอนะล็อกมาถึงอินพุตของคอนโทรลเลอร์และลักษณะของการควบคุมที่เอาต์พุตจึงเกิดความล่าช้าที่ไม่ต้องการ ปรากฏขึ้น ซึ่งจะเพิ่มการหน่วงเวลาโดยรวมในลูปควบคุมและลดระยะขอบเสถียรภาพ ผลกระทบหลักที่ปรากฏระหว่างการสุ่มตัวอย่างและซึ่งมักจะ "ค้นพบใหม่" คือการปรากฏตัวของความถี่นามแฝงในสเปกตรัมของสัญญาณควอนไทซ์ในกรณีที่ความถี่ควอนไทซ์ไม่สูงพอ เอฟเฟกต์ที่คล้ายกันนี้เกิดขึ้นเมื่อถ่ายล้อรถที่หมุนอยู่ ความถี่ของสัญญาณนามแฝงมีค่าเท่ากับความแตกต่างระหว่างความถี่รบกวนและความถี่ควอนไทเซชัน ในกรณีนี้ สัญญาณรบกวนความถี่สูงจะเลื่อนไปที่บริเวณความถี่ต่ำซึ่งจะถูกซ้อนทับบนสัญญาณที่มีประโยชน์และสร้างขนาดใหญ่ ปัญหาเนื่องจากไม่สามารถกรองได้ในขั้นตอนนี้ เพื่อขจัดเอฟเฟกต์นามแฝง จำเป็นต้องติดตั้งฟิลเตอร์แอนะล็อกก่อนอินพุตของตัวแปลงแอนะล็อกเป็นดิจิทัล ซึ่งจะลดทอนสัญญาณรบกวนอย่างน้อยหนึ่งลำดับความสำคัญที่ความถี่เท่ากับครึ่งหนึ่งของความถี่ควอนไทเซชัน ปกติแล้วจะใช้ตัวกรอง Butterworth ของลำดับที่สองหรือสูงกว่า ทางออกที่สองของปัญหาคือการเพิ่มความถี่ควอนไทเซชันเพื่อให้สูงกว่าความถี่สูงสุดของสเปกตรัมรบกวนอย่างน้อย 2 เท่า (ตามทฤษฎีบท Kotelnikov) ซึ่งช่วยให้สามารถใช้ตัวกรองสัญญาณความถี่ต่ำแบบดิจิทัลได้หลังจากการควอนไทเซชัน ด้วยอัตราการสุ่มตัวอย่างดังกล่าว สัญญาณดิจิตอลที่ได้รับจะเทียบเท่ากับสัญญาณอนาล็อกอย่างสมบูรณ์ในแง่ของปริมาณข้อมูล และคุณสมบัติทั้งหมดของตัวควบคุมอนาล็อกสามารถขยายไปสู่สัญญาณดิจิทัลได้ การเปลี่ยนไปใช้สมการความแตกต่างจำกัด การเปลี่ยนไปใช้ตัวแปรแบบไม่ต่อเนื่องในสมการคอนโทรลเลอร์แบบแอนะล็อกทำได้โดยการแทนที่อนุพันธ์และอินทิกรัลด้วยอนุพันธ์ที่ไม่ต่อเนื่อง หากสมการเขียนในรูปแบบตัวดำเนินการ ขั้นแรกให้เปลี่ยนจากพื้นที่ภาพเป็นพื้นที่เดิม ในกรณีนี้ ตัวดำเนินการสร้างความแตกต่างจะถูกแทนที่ด้วยอนุพันธ์ ตัวดำเนินการการรวมจะถูกแทนที่ด้วยอินทิกรัล มีหลายวิธีในการประมาณอนุพันธ์และอินทิกรัลโดยใช้คู่ที่ไม่ต่อเนื่องกัน ซึ่งมีการสรุปไว้ในหลักสูตรเกี่ยวกับวิธีการเชิงตัวเลขสำหรับการแก้สมการเชิงอนุพันธ์ ในตัวควบคุม PID ประเภทที่พบได้บ่อยที่สุดคือประเภทการประมาณอนุพันธ์ที่ง่ายที่สุดโดยความแตกต่างแบบจำกัดและอินทิกรัลโดยผลรวมจำกัด พิจารณาเงื่อนไขสำคัญของตัวควบคุม PID: แยกความแตกต่างของทั้งสองส่วนด้วยความเคารพต่อเวลา เราจะได้ แทนที่ดิฟเฟอเรนเชียลในนิพจน์นี้ด้วยความแตกต่างจำกัด (ความแตกต่างด้านซ้าย) เราได้รับ โดยที่ดัชนี i หมายความว่าค่าที่กำหนดถูกใช้ในเวลา ti (โปรดทราบว่าที่นี่และด้านล่างดัชนี i ใน Ti ไม่ได้หมายถึงจำนวนขั้นตอนของเวลา แต่ สัมประสิทธิ์อินทิกรัลตัวควบคุม PID) จากนิพจน์สุดท้ายเราได้รับ: ดังนั้น ค่าถัดไปของอินทิกรัลสามารถคำนวณได้โดยรู้ค่าก่อนหน้าและค่าของข้อผิดพลาดในเวลาก่อนหน้า อย่างไรก็ตาม สูตรดังกล่าวมีแนวโน้มที่จะสะสมข้อผิดพลาดในการคำนวณเมื่อเวลาผ่านไป หากอัตราส่วน Dt/Ti ไม่เล็กพอ สูตรการรวมอื่นมีความเสถียรมากกว่า - โดยมีความแตกต่างที่ถูกต้อง เมื่อนำค่าความผิดพลาดไปพร้อมกับอินทิกรัลที่คำนวณได้: พิจารณาเงื่อนไขส่วนต่างของตัวควบคุม PID พร้อมตัวกรอง: ผ่านสูตรนี้จากภาพไปยังต้นฉบับ เราได้รับ: การแทนที่ดิฟเฟอเรนเชียลด้วยการเพิ่มขึ้นอย่างจำกัด เราจะได้สมการความแตกต่าง: โปรดทราบว่าสำหรับการบรรจบกันของกระบวนการวนซ้ำ (21) จำเป็นที่ เมื่อ Dt > Td/N กระบวนการวนซ้ำ (21) จะกลายเป็นการสั่น ซึ่งไม่เป็นที่ยอมรับสำหรับตัวควบคุม PID สมการความแตกต่างที่ได้จากผลต่างที่ถูกต้องมีลักษณะที่ดีที่สุด: ที่นี่เงื่อนไขการบรรจบกันเป็นที่พอใจสำหรับ Dt ทั้งหมดและไม่มีการสั่นเกิดขึ้นสำหรับค่าใด ๆ ของพารามิเตอร์ นอกจากนี้ สูตรสุดท้ายยังให้คุณ "ปิด" องค์ประกอบส่วนต่างในตัวควบคุม PID โดยการตั้งค่า Td = 0 ซึ่งไม่สามารถทำได้ในนิพจน์ (21) เนื่องจากการหารด้วยศูนย์เกิดขึ้นในกรณีนี้ คุณสามารถใช้สูตรที่แม่นยำยิ่งขึ้นสำหรับการสร้างความแตกต่างเชิงตัวเลขและการรวม ซึ่งเป็นที่รู้จักจากวิธีการเชิงตัวเลขสำหรับการแก้สมการ ค่าของวัฏจักรการหาปริมาณ Dt ถูกเลือกให้น้อยที่สุดเท่าที่จะเป็นไปได้ ซึ่งจะช่วยปรับปรุงคุณภาพของการควบคุม เพื่อให้แน่ใจว่ามีการควบคุมคุณภาพที่ดี ไม่ควรเกิน 1/15...1/6 ของเวลาที่สร้างการตอบสนองชั่วคราวของวัตถุที่ระดับ 0.95 หรือ 1/4...1/6 ของ มูลค่าของความล่าช้าในการขนส่ง อย่างไรก็ตาม ด้วยความถี่การควอนไทซ์ที่เพิ่มขึ้นมากกว่า 2 เท่า เมื่อเทียบกับความถี่บนของสเปกตรัมของสัญญาณรบกวน (ตามทฤษฎีบท Kotelnikov) ไม่มีการปรับปรุงคุณภาพของการควบคุมเพิ่มเติมอีก หากไม่มีตัวกรอง anti-alias ที่อินพุตของตัวควบคุม ความถี่ quantization จะถูกเลือกสูงกว่าความถี่คัทออฟบนของสเปกตรัมเสียงรบกวน 2 เท่าเพื่อใช้การกรองแบบดิจิตอล ควรคำนึงด้วยว่าอุปกรณ์บริหารต้องมีเวลาออกกำลังกายในช่วงเวลา Dt. หากใช้ตัวควบคุมไม่เพียง แต่สำหรับการควบคุม แต่ยังสำหรับการส่งสัญญาณเตือนภัยด้วย รอบการหาปริมาณต้องไม่น้อยกว่าความล่าช้าที่อนุญาตสำหรับการทำงานของสัญญาณเตือน ด้วยวงจรการหาปริมาณขนาดเล็ก ข้อผิดพลาดในการคำนวณอนุพันธ์จะเพิ่มขึ้น หากต้องการลด คุณสามารถใช้การทำให้ข้อมูลที่ได้รับราบรื่นบนจุดที่รวบรวมได้หลายจุดก่อนขั้นตอนการสร้างความแตกต่าง สมการตัวควบคุม PID แบบดิจิตอล จากข้างต้น สมการคอนโทรลเลอร์ PID แบบไม่ต่อเนื่องสามารถเขียนได้ดังนี้: โดยที่ i คือจำนวนขั้นตอนของเวลา ในการเริ่มต้นอัลกอริทึม เรามักจะเลือก uD0 = 0, I0 = 0, e0 = 0 แต่อาจมีอย่างอื่น เงื่อนไขเบื้องต้นขึ้นอยู่กับความหมายของปัญหาการควบคุมเฉพาะ โปรดทราบว่าอัลกอริธึมที่ได้จากการแทนที่ตัวดำเนินการสร้างความแตกต่างและการรวมในสมการตัวควบคุม PID แบบคลาสสิก ผลต่างปลายทางและผลรวมสุดท้าย มีความเสถียรต่ำและความแม่นยำต่ำดังที่แสดงไว้ก่อนหน้านี้ อย่างไรก็ตาม เมื่อความถี่การสุ่มตัวอย่างเพิ่มขึ้น ความแตกต่างระหว่างอัลกอริธึมทั้งสองข้างต้นจะถูกลบออก รูปแบบที่เพิ่มขึ้นของตัวควบคุม PID แบบดิจิตอล บ่อยครั้ง โดยเฉพาะอย่างยิ่งในโครงข่ายประสาทเทียมและตัวควบคุมแบบฟัซซี่ สมการของตัวควบคุม PID ถูกใช้ในรูปแบบของการพึ่งพาการเพิ่มขึ้นของตัวแปรควบคุมบนข้อผิดพลาดของการควบคุมและอนุพันธ์ของมัน อุปกรณ์ภายนอกมีบทบาทเป็นผู้รวมระบบ เช่น มอเตอร์ธรรมดาหรือสเต็ปเปอร์มอเตอร์ มุมของการหมุนของแกนจะเป็นสัดส่วนกับค่าของสัญญาณควบคุมและเวลา ในตัวควบคุมแบบฟัซซี่ เมื่อกำหนดกฎฟัซซี่ ผู้เชี่ยวชาญสามารถกำหนดค่าการพึ่งพาของตัวแปรควบคุมกับค่าอนุพันธ์ได้ แต่เขาไม่สามารถกำหนดค่าการพึ่งพาอินทิกรัลได้ เนื่องจากอินทิกรัล "จำ" ประวัติการเปลี่ยนแปลงข้อผิดพลาดทั้งหมดได้ ซึ่ง คนจำไม่ได้ รูปแบบที่เพิ่มขึ้นของตัวควบคุม PID ได้มาจากสมการสร้างความแตกต่าง (25): ในการรับข้อผิดพลาดในการควบคุมเป็นศูนย์ ต้องติดตั้ง integrator ที่เอาต์พุตของตัวควบคุมส่วนเพิ่ม (รูปที่ 20): รูปที่ 20 - รูปแบบที่เพิ่มขึ้นของตัวควบคุม PID ผ่านนิพจน์ที่ได้รับไปยังความแตกต่างที่จำกัด เราได้รับรูปแบบที่ไม่ต่อเนื่องของตัวควบคุม PID แบบเพิ่มหน่วย: โดยที่ Dui+1 = ui+1 - ui; Dei = ei - ei-1. สมการความแตกต่างที่เสถียรและแม่นยำยิ่งขึ้นสามารถหาได้โดยแทนที่นิพจน์สำหรับ ui+1 และ ui จาก (24) ลงในสูตร Dui+1 = ui+1 - ui รูปแบบที่เพิ่มขึ้นของคอนโทรลเลอร์นั้นสะดวกสำหรับการใช้งานในไมโครคอนโทรลเลอร์เนื่องจากในนั้นการคำนวณส่วนใหญ่จะดำเนินการทีละส่วนซึ่งสามารถแสดงด้วยคำที่มีเลขฐานสองจำนวนน้อย เพื่อให้ได้ค่าของตัวแปรควบคุม คุณสามารถทำการบวกสะสมในขั้นตอนสุดท้ายของการคำนวณ: ui+1 = ui + Dui+1 ก่อนคำนวณพารามิเตอร์ของตัวควบคุม จำเป็นต้องกำหนดเป้าหมายและเกณฑ์สำหรับคุณภาพของการควบคุม ตลอดจนข้อจำกัดเกี่ยวกับขนาดและอัตราการเปลี่ยนแปลงของตัวแปรในระบบ ตามเนื้อผ้า ตัวบ่งชี้คุณภาพหลักถูกกำหนดตามข้อกำหนดสำหรับรูปแบบของการตอบสนองของระบบปิดต่อการเปลี่ยนแปลงขั้นตอนในเซ็ตพอยต์ อย่างไรก็ตาม เกณฑ์นี้มีจำกัดมาก โดยเฉพาะอย่างยิ่ง มันไม่ได้พูดอะไรเกี่ยวกับปริมาณของการลดทอนของเสียงในการวัดหรืออิทธิพลของการรบกวนจากภายนอก มันสามารถให้ความคิดที่ผิดพลาดเกี่ยวกับความทนทานของระบบ ดังนั้น เพื่ออธิบายหรือทดสอบระบบอย่างสมบูรณ์ด้วยตัวควบคุม PID จำเป็นต้องมีตัวบ่งชี้คุณภาพเพิ่มเติมจำนวนหนึ่ง ซึ่งจะกล่าวถึงในภายหลัง ในกรณีทั่วไป การเลือกตัวบ่งชี้คุณภาพไม่สามารถทำให้เป็นทางการได้อย่างสมบูรณ์และต้องดำเนินการตามความหมายของปัญหาที่กำลังแก้ไข 3. คุณภาพการกำกับดูแล 3.1 เกณฑ์การปฏิบัติงาน การลดทอนอิทธิพลของการรบกวนจากภายนอก การเลือกเกณฑ์คุณภาพการควบคุมขึ้นอยู่กับวัตถุประสงค์ของการใช้ตัวควบคุม เป้าหมายอาจเป็น: การรักษาค่าคงที่ของพารามิเตอร์ (เช่น อุณหภูมิ) การติดตามการตั้งค่าหรือการควบคุมซอฟต์แวร์ การควบคุมแดมเปอร์ในถังของเหลว ฯลฯ สำหรับงานเฉพาะ ปัจจัยที่สำคัญที่สุดอาจเป็น: รูปแบบการตอบสนองต่อสิ่งรบกวนภายนอก (เวลาชำระ เกินเวลา เวลาตอบสนอง ฯลฯ); รูปร่างของการตอบสนองต่อเสียงการวัด รูปแบบการตอบสนองต่อสัญญาณตั้งค่า ความทนทานเมื่อเทียบกับการแพร่กระจายของพารามิเตอร์ของวัตถุควบคุม ประหยัดพลังงานในระบบควบคุม การลดสัญญาณรบกวนในการวัดให้น้อยที่สุด สำหรับตัวควบคุม PID แบบคลาสสิก พารามิเตอร์ที่ดีที่สุดสำหรับการตรวจสอบการตั้งค่าโดยทั่วไปจะแตกต่างจากพารามิเตอร์ที่ดีที่สุดสำหรับการลดอิทธิพลของการรบกวนจากภายนอก เพื่อให้พารามิเตอร์ทั้งสองเหมาะสมที่สุดในเวลาเดียวกัน จำเป็นต้องใช้ตัวควบคุม PID ที่มีอิสระสองระดับ การติดตามการเปลี่ยนแปลงเซ็ตพอยต์ที่แม่นยำเป็นสิ่งจำเป็นในระบบควบคุมการเคลื่อนไหว ในวิทยาการหุ่นยนต์ ในระบบควบคุมกระบวนการ ซึ่งจุดตั้งค่ามักจะไม่เปลี่ยนแปลงเป็นเวลานาน จำเป็นต้องมีการลดทอนสูงสุดของอิทธิพลของโหลด (การรบกวนจากภายนอก) ในระบบควบคุมอ่างเก็บน้ำของเหลว จำเป็นต้องตรวจสอบให้แน่ใจว่าการไหลแบบราบเรียบ (ลดความแปรปรวนของตัวแปรเอาต์พุตของตัวควบคุมให้น้อยที่สุด) เป็นต้น ดังที่แสดงในส่วนย่อย การตอบรับทำให้อิทธิพลของการก่อกวนภายนอกอ่อนแอลงใน |S(jш)| ครั้ง ยกเว้นความถี่ที่ |S(jw)| การรบกวนจากภายนอกสามารถใช้กับวัตถุได้ในส่วนต่างๆ ของวัตถุ อย่างไรก็ตาม เมื่อไม่ทราบตำแหน่งเฉพาะ การก่อกวนจะถือว่าส่งผลต่ออินพุตของวัตถุ ในกรณีนี้ การตอบสนองของระบบต่อการรบกวนภายนอกถูกกำหนดโดยฟังก์ชันการถ่ายโอนจากอินพุตของการรบกวนภายนอกไปยังเอาต์พุตของระบบ: เนื่องจากสิ่งรบกวนภายนอกมักจะอยู่ในส่วนความถี่ต่ำของสเปกตรัม โดยที่ |S(jш)| และด้วยเหตุนี้ T ดังนั้นนิพจน์ (28) สามารถทำให้ง่ายขึ้นได้: ดังนั้นเพื่อลดอิทธิพลของการรบกวนภายนอก (โดยเฉพาะอย่างยิ่งอิทธิพลของโหลด) เราสามารถลดค่าคงที่การรวม Ti ในโดเมนเวลา การตอบสนองต่อสิ่งรบกวนภายนอกจะประมาณจากการตอบสนองต่อการกระโดดครั้งเดียว d(t) การลดผลกระทบของสัญญาณรบกวนในการวัด: ฟังก์ชันการถ่ายโอนจากจุดที่ใช้สัญญาณรบกวนไปยังเอาต์พุตของระบบคือ: เนื่องจากการตอบสนองความถี่ของวัตถุลดลงโดย ความถี่สูงฟังก์ชันความไวมีแนวโน้มเป็น 1 (รูปที่ 18) ดังนั้นจึงเป็นไปไม่ได้ที่จะลดผลกระทบของสัญญาณรบกวนในการวัดโดยใช้การป้อนกลับ อย่างไรก็ตาม เสียงเหล่านี้สามารถขจัดออกได้อย่างง่ายดายด้วยการใช้ฟิลเตอร์กรองความถี่ต่ำและการป้องกันและการต่อสายดินที่เหมาะสม ระบบปิดยังคงเสถียรเมื่อพารามิเตอร์อ็อบเจ็กต์เปลี่ยนแปลงตามค่าของ DP(jw) หากเป็นไปตามเงื่อนไข (18) เกณฑ์คุณภาพในโดเมนเวลา ในการประเมินคุณภาพของกฎระเบียบในระบบปิดด้วยตัวควบคุม PID มักจะใช้การดำเนินการอินพุตแบบเป็นขั้นตอนและเกณฑ์จำนวนหนึ่งเพื่ออธิบายรูปแบบของกระบวนการชั่วคราว (รูปที่ 21): ข้อผิดพลาดในการควบคุมสูงสุด และเวลาที่ Tmax ที่ข้อผิดพลาดถึงค่าสูงสุดนี้ ข้อผิดพลาดแอบโซลูทแบบบูรณาการ ปริพันธ์ของข้อผิดพลาดกำลังสอง ลดลง d (นี่คืออัตราส่วนของค่าสูงสุดแรกกับค่าที่สอง ค่าทั่วไป d=4 หรือมากกว่า) เราสังเกตว่าคำจำกัดความอื่นๆ ของการลดการทำให้หมาด ๆ นั้นยังพบได้ในวรรณกรรม โดยเฉพาะอย่างยิ่ง เป็นหรือเป็นสัมประสิทธิ์ b/a ในเลขชี้กำลังของเลขชี้กำลังที่อธิบายซองจดหมายของการสั่นแบบแดมเปอร์ ข้อผิดพลาดคงที่ e0 (นี่คือข้อผิดพลาดคงที่ในสมดุลนั่นคือในโหมดคงที่หรือคงที่ของระบบ); เวลาในการชำระ Te ด้วยข้อผิดพลาด es ที่กำหนด (นี่คือเวลาหลังจากที่ข้อผิดพลาดในการควบคุมไม่เกินค่าที่ตั้งไว้ es โดยปกติ es = 1% น้อยกว่า 2% หรือ 5% - ตามลำดับ เวลาการตกตะกอนจะแสดงด้วย T0 01, T0.02, T0.05 ); โอเวอร์ชูต emax (นี่คือส่วนที่เกินของสไปค์แรกเหนือค่าสถานะคงตัวของตัวแปร ซึ่งมักจะแสดงเป็นเปอร์เซ็นต์ของค่าสถานะคงตัว); เวลาที่เพิ่มขึ้น Tr (นี่คือช่วงเวลาที่ตัวแปรเอาต์พุตเพิ่มขึ้นจาก 10 เป็น 90% ของค่าสถานะคงตัว); คาบของการสั่นแบบแดมเปอร์ Tcl (พูดอย่างเคร่งครัด, การสั่นของแดมเปอร์ไม่เป็นคาบ, ดังนั้นที่นี่จึงเข้าใจคาบว่าเป็นระยะห่างระหว่างจุดสูงสุดสองจุดที่อยู่ติดกันของลักษณะชั่วคราว). รูปที่ 21 - เกณฑ์คุณภาพของกฎระเบียบในโดเมนเวลา สำหรับระบบควบคุมการเคลื่อนที่ ฟังก์ชันทางลาดมักใช้เป็นสัญญาณทดสอบมากกว่าฟังก์ชันการกระโดด เนื่องจากระบบเครื่องกลไฟฟ้ามักจะมีอัตราการฆ่าที่จำกัดของค่าเอาต์พุต เกณฑ์ข้างต้นใช้ในการประเมินคุณภาพของการตอบสนองต่อการเปลี่ยนแปลงการตั้งค่าและผลกระทบของสิ่งรบกวนภายนอกและสัญญาณรบกวนในการวัด เกณฑ์คุณภาพความถี่ ในโดเมนความถี่ มักใช้เกณฑ์ต่อไปนี้ ซึ่งได้มาจากพล็อตการตอบสนองของแอมพลิจูด-ความถี่ของระบบปิด y (u) (รูปที่ 22): แบนด์วิดท์ u-3dB (หรือ u0.7) ที่ระดับ -3 dB (หรือที่ระดับ 1/ = 0.7) - ย่านความถี่ตั้งแต่ 0 ถึง u-3dB = u0.7 ซึ่งภายในเส้นโค้งตอบสนองความถี่จะลดลงโดยไม่มี มากกว่า 3 dB เมื่อเทียบกับค่าที่ความถี่ศูนย์ y(0); การสั่น M - อัตราส่วนของค่าสูงสุด (สูงสุด) ของการตอบสนองความถี่ ymax ต่อค่าของมันที่ความถี่ศูนย์ y(0) นั่นคือในสถานะคงตัว ค่าทั่วไปคือ M = 1.5...1.6; ความถี่เรโซแนนซ์ของระบบ wp คือความถี่ที่การตอบสนองความถี่ถึงค่าสูงสุด ymax = y(wp) เกณฑ์ความถี่ของเรกกูเลเตอร์ที่แท้จริงต้องไม่สัมพันธ์กับเกณฑ์เวลาอย่างชัดแจ้งเนื่องจากความไม่เป็นเชิงเส้น (โดยปกติแล้วจะเป็นประเภท "การจำกัด" ที่ไม่เป็นเชิงเส้น) และอัลกอริธึมสำหรับขจัดเอฟเฟกต์ความอิ่มตัวของอินทิกรัล อย่างไรก็ตาม มีความเป็นไปได้โดยประมาณที่จะสร้างความสัมพันธ์ต่อไปนี้ระหว่างเกณฑ์ในโดเมนความถี่และเวลา: ความถี่ของลักษณะการถ่ายโอนสูงสุดของระบบปิดโดยประมาณจะสอดคล้องกับระยะเวลาของการสั่นแบบหน่วงของการตอบสนองต่ออินพุตแบบขั้นตอน - h; ยิ่งการสั่นสะเทือนช้าลงเท่าใด ดัชนีการแกว่ง M ก็จะยิ่งมากขึ้น การเลือกพารามิเตอร์ตัวควบคุม ที่ ทฤษฎีทั่วไป ระบบควบคุมอัตโนมัติโครงสร้างของตัวควบคุมจะถูกเลือกตามรูปแบบของวัตถุควบคุม ในกรณีนี้ วัตถุควบคุมที่ซับซ้อนมากขึ้นจะสอดคล้องกับตัวควบคุมที่ซับซ้อนมากขึ้น ในกรณีของเรา โครงสร้างตัวควบคุมได้รับการตั้งค่าแล้ว - เรากำลังพิจารณาตัวควบคุม PID โครงสร้างนี้ง่ายมาก ดังนั้นตัวควบคุม PID จึงไม่สามารถให้ อย่างดีการควบคุม แม้ว่าตัวควบคุม PID จะใช้ในงานอุตสาหกรรมส่วนใหญ่ ประเภทและการใช้เซ็นเซอร์ ระบบควบคุมอัตโนมัติพารามิเตอร์ระบอบการปกครองของกระบวนการทางเทคโนโลยี การผลิตสารเคมี. หลักการทำงานของเซ็นเซอร์ที่วัดได้ ตัวควบคุมอุณหภูมิ สวิตช์โมดูลาร์ หมายถึงการป้องกันการติดตั้งไฟฟ้า วิทยานิพนธ์, เพิ่ม 04/26/2014 ทำความคุ้นเคยกับขั้นตอนการคำนวณการตั้งค่าของหน่วยงานกำกับดูแลทั่วไปในระบบตอบสนองอัตโนมัติแบบวงเดียว คุณสมบัติของการเลือกประเภทของตัวควบคุมอุตสาหกรรม วิธีการสร้างขอบเขตความเสถียรในระนาบของพารามิเตอร์การปรับจูนของคอนโทรลเลอร์ วิทยานิพนธ์, เพิ่ม 06/17/2013 การวิเคราะห์คุณสมบัติของวัตถุควบคุม ตัวควบคุมทั่วไป และการเลือกประเภทของตัวควบคุม การคำนวณพารามิเตอร์ที่เหมาะสมที่สุดของการตั้งค่าคอนโทรลเลอร์ การพึ่งพาการดำเนินการด้านกฎระเบียบเกี่ยวกับการเบี่ยงเบนของค่าควบคุม หน่วยงานกำกับดูแลที่เป็นส่วนประกอบและตามสัดส่วน ภาคเรียน, เพิ่ม 02/11/2014 การออกแบบอุปกรณ์วัดอุณหภูมิในห้อง ทางเลือกของเซ็นเซอร์อุณหภูมิ ไมโครคอนโทรลเลอร์ และบอร์ดตรวจแก้จุดบกพร่อง การศึกษาการทำงานของเซ็นเซอร์อุณหภูมิในตัว การพัฒนาซอฟต์แวร์. การจัดระเบียบการทำงานของโปรแกรม ภาคเรียนที่เพิ่ม 12/26/2556 การออกแบบโมเดลมอเตอร์ไฟฟ้าพร้อมพารามิเตอร์ที่คำนวณในสภาพแวดล้อม Simulink การจำลองการทำงานของเครื่องยนต์ด้วยโหลดต่างๆ (แรงบิดรบกวน) การคำนวณพารามิเตอร์และตัวควบคุมที่เหมาะสมที่สุดและตัวบ่งชี้คุณภาพสำหรับคุณลักษณะต่างๆ ภาคเรียนที่เพิ่ม 06/24/2012 การคำนวณการตอบสนองความถี่ที่ซับซ้อนของวัตถุในช่วงความถี่ที่ต้องการ การกำหนดระยะขอบของความเสถียรของสถานะปิด ระบบอัตโนมัติระเบียบข้อบังคับ. การประเมินคุณภาพการควบคุมเมื่อใช้ตัวควบคุม PI และ PID และเลือกตัวควบคุมที่ดีที่สุด ภาคเรียนที่เพิ่ม 04/12/2014 ลักษณะการเร่งความเร็วของวัตถุของการควบคุมและการกำหนดพารามิเตอร์ที่แสดงคุณสมบัติเฉื่อยของวัตถุ การคำนวณการตั้งค่าตัวควบคุมตามลักษณะเฟสแอมพลิจูดของวัตถุควบคุม การคำนวณตัวชี้วัดคุณภาพ ATS กระดาษภาคเรียนเพิ่ม 10/22/2012 การสังเคราะห์คอนโทรลเลอร์ตามสัดส่วน-อินทิกรัล-ดิฟเฟอเรนเชียลที่ให้ตัวบ่งชี้ความแม่นยำและคุณภาพของการควบคุมสำหรับระบบปิด ลักษณะแอมพลิจูดความถี่ การวิเคราะห์แบบไดนามิกและกระบวนการชั่วคราวของระบบที่ปรับแล้ว ภาคเรียนที่เพิ่ม 08/06/2013 การคำนวณพารามิเตอร์การปรับแต่งตัวควบคุม PI สำหรับวัตถุลำดับที่สอง การคำนวณเชิงวิเคราะห์และการใช้งานโปรแกรมในสภาพแวดล้อม MatLab ซึ่งกำหนดพารามิเตอร์ของตัวควบคุมและค่าชั่วคราว เกณฑ์คุณภาพของกระบวนการชั่วคราวของระบบปิด งานห้องปฏิบัติการเพิ่มเมื่อ 09/29/2016 การจำแนกประเภทของสารแขวนลอยแม่เหล็กไฟฟ้า การสร้างแบบจำลองทางคณิตศาสตร์ของขาตั้ง การใช้งานซอฟต์แวร์ของตัวควบคุมสัดส่วน-อินทิกรัล-ส่วนต่าง คำอธิบายของไมโครคอนโทรลเลอร์ ATmega 328 และบอร์ด Arduino การประกอบและการว่าจ้างของขาตั้ง ตัวควบคุม PID เป็นตัวควบคุมที่ง่ายที่สุดที่มีการใช้งานฮาร์ดแวร์แอนะล็อกที่มีประสิทธิภาพ ดังนั้นจึงใช้กันอย่างแพร่หลายมากที่สุด สำหรับงานนั้น ต้องมีการตั้งค่า 3 ค่าสัมประสิทธิ์สำหรับวัตถุเฉพาะ ช่วยให้คุณเลือกกระบวนการควบคุมตามข้อกำหนดได้ มีความหมายทางกายภาพที่เรียบง่ายและสัญกรณ์ทางคณิตศาสตร์อย่างง่าย มีการใช้กันอย่างแพร่หลายและมักใช้ในเครื่องควบคุมอุณหภูมิ ตัวควบคุมการไหลของก๊าซ และระบบอื่นๆ ที่จำเป็นต้องรักษาพารามิเตอร์บางอย่างไว้ที่ระดับที่กำหนดด้วย การเปลี่ยนแปลงที่เป็นไปได้ระหว่างระดับที่ตั้งไว้ล่วงหน้าที่แตกต่างกัน แน่นอนว่ามีตัวควบคุมที่ซับซ้อนมากขึ้นที่ช่วยให้คุณเข้าถึงพารามิเตอร์ที่ตั้งไว้ได้อย่างแม่นยำและรวดเร็วยิ่งขึ้นและมีการโอเวอร์โหลดน้อยลง รวมทั้งคำนึงถึงความไม่เป็นเชิงเส้นหรือฮิสเทรีซิสของวัตถุที่ควบคุม แต่พวกมันมีความซับซ้อนในการคำนวณมากกว่าและยากกว่า เพื่อติดตั้ง. แม้จะมีความเรียบง่ายทั้งความหมายทางกายภาพและสัญกรณ์คณิตศาสตร์: ในการใช้งานซอฟต์แวร์ของตัวควบคุม PID ข้อผิดพลาดมักจะเกิดขึ้นแม้ในอุปกรณ์อัตโนมัติที่ผ่านการตรวจสอบแล้ว ยิ่งไปกว่านั้น การตรวจสอบคุณภาพของการนำตัวควบคุม PID ไปใช้นั้นทำได้ง่ายมาก พิจารณา ตัวอย่างที่ง่ายที่สุด: เทอร์โมสตัท ในการทดสอบคุณภาพของวัตถุนั้น วัตถุกำลังแรงต่ำที่มีความเฉื่อยต่ำและเร็วนั้นเหมาะสมที่สุด คลาสสิกของประเภท: หลอดไฟธรรมดา 100W ที่มีเทอร์โมคัปเปิล (XA) แบบบางขันไว้ และสิ่งแรกที่ต้องตรวจสอบตัวควบคุม PID คือการย่อยสลาย PID ให้เหลือเพียงตัวควบคุม P นั่นคือเราตั้งค่าอินทิกรัลและสัมประสิทธิ์ดิฟเฟอเรนเชียลเป็นศูนย์และตั้งค่าสัดส่วนเป็นค่าสูงสุด เราเปิดเครื่องควบคุมตรวจสอบ: อุณหภูมิปัจจุบันคือ 22 องศาการตั้งค่าคือ 16 องศา หลอดไฟไม่สว่าง เราเริ่มเพิ่มการตั้งค่า: 16.1, 16.3, 16.7, 18 ... 19 ... ไฟเปิดอยู่ ยังไง?! ที่ไหน?! เราหยุด - ปิด เราจึงได้พบกัน ความผิดพลาดแบบคลาสสิกครั้งแรกการนำตัวควบคุม PID ไปใช้ การพูดนอกเรื่องทางคณิตศาสตร์เล็กน้อย: ลองนึกถึงสัญกรณ์ปริพันธ์ที่ระบุไว้ด้านบนอีกครั้ง เราใช้มันโดยทางโปรแกรม ซึ่งหมายความว่าไม่ต่อเนื่อง นั่นคือด้วยความสม่ำเสมอที่น่าอิจฉา เราวัดค่าอินพุต เปรียบเทียบกับเซ็ตพอยต์ คำนวณผลกระทบ ออก ทำซ้ำ ดังนั้นจึงจำเป็นต้องเปลี่ยนจากรูปแบบอินทิกรัลไปเป็นโครงร่างความแตกต่างจำกัด เมื่อทำการเปลี่ยนผ่าน มักจะใช้การเปลี่ยนแปลงแบบตัวต่อตัว: การใช้สูตรโดยตรงจะต้องใช้ในการคำนวณและจัดเก็บอินทิกรัลที่ไม่ตรงกันในช่วงเวลาขนาดใหญ่ และประการที่สอง จะต้องมีการทำงานจุดทศนิยมที่มีความแม่นยำสูง (เนื่องจากค่าสัมประสิทธิ์อินทิกรัล Ki เสมอ< 1), либо операции деления (представляя коэффициент в форме 1/Ki) большой разрядности. Всё это требует вычислительных ресурсов, коих в embedded как правило сильно ограничено… Поэтому, вместо реализации прямой схемы, реализуют рекуррентную формулу: ดังนั้นกลับไปที่หน่วยงานกำกับดูแลของเรา ดังนั้นจึงมีวัตถุที่สามารถปรับได้: หลอดไฟ ในการควบคุมพลังงานที่จ่ายไปนั้น ใช้วิธีการง่ายๆ: แหล่งจ่ายไฟ (220V 50Hz) ถูกป้อนผ่าน triac ไปยังโหลด ไตรแอคจะปิดลงในขณะที่ครึ่งคลื่นผ่านศูนย์ และยังคงดับอยู่จนกว่าจะมีสัญญาณถูกนำไปใช้กับอิเล็กโทรดควบคุม ดังนั้น ยิ่งเราให้สัญญาณควบคุมเร็วขึ้นหลังจากการเริ่มต้นของครึ่งคลื่น พลังงานจากครึ่งคลื่นนี้จะไปถึงวัตถุที่ควบคุมมากขึ้นเท่านั้น ด้วยการกำหนดเวลาเชิงเส้นตรงของพื้นที่ครึ่งคลื่นอย่างถูกต้องจากเวลา X จนถึงจุดสิ้นสุดของครึ่งคลื่น เราสามารถส่งออกพลังงานจาก 0 ถึง 100% ด้วยความแม่นยำซึ่งเราคำนวณตารางการทำให้เป็นเชิงเส้น ดังนั้นเราจึงสามารถส่งออกพลังงานได้ตั้งแต่ 0 ถึง 100% ในวัตถุจริง มักจะเป็นไปไม่ได้ที่จะให้พลังงาน 100% - ตัวอย่างเช่น สิ่งนี้เต็มไปด้วยความเหนื่อยหน่ายขององค์ประกอบความร้อน ดังนั้น อุปกรณ์ทั้งหมดจึงมีการตั้งค่าสำหรับกำลังขับต่ำสุดและสูงสุดต่อวัตถุ ดังนั้น หลังจากคำนวณ U(n) ตามสูตรข้างต้น ข้อจำกัดของผลลัพธ์เพิ่มเติมจะถูกเพิ่ม: เหตุผลนั้นซ้ำซาก: ในช่วงเวลาของการเปลี่ยนจากรูปแบบไม่ต่อเนื่องเป็นโครงการความแตกต่าง จำกัด เรา "ยึด" การดำเนินการคำนวณอินทิกรัลและในแต่ละขั้นตอนเราจะเพิ่มอนุพันธ์ให้กับผลรวมสะสม U(n-1) . เมื่อกำหนดข้อจำกัดแล้ว เราก็ทำให้อินทิกรัลที่คำนวณได้ทั้งหมดเป็นโมฆะ (ไม่ใช่ว่าเรารีเซ็ตเท่าไหร่เรานำมาอยู่ในช่วง 0-100 ซึ่งในกรณีนี้ไม่สำคัญ) ดังนั้นเราจึงแยกความแตกต่างของตัวควบคุม PID และตัวเร่งส่วนต่างยังคงอยู่ สิ่งที่ดูเหมือนตัวควบคุมดิฟเฟอเรนเชียลธรรมดาจริง ๆ - กำลังจ่ายตามสัดส่วนของการเปลี่ยนแปลงในเซ็ตพอยต์หรือตัวแปรควบคุม และไม่ได้สัดส่วนกับความแตกต่างระหว่างจุดตั้งค่าและตัวแปรควบคุม บทสรุป #1: ไม่สามารถจำกัดการคำนวณ U(n) ได้ ในการจำกัดกำลังไฟฟ้าที่จ่ายให้กับอุปกรณ์เอาท์พุต ควรตั้งค่าตัวแปรแยกต่างหาก ตอนนี้เราได้ Urn มาสำหรับพลังที่จำกัดแล้ว เราอัปโหลดอีกครั้ง เราทำการทดสอบต่อไป ระหว่างที่รอและค่อยๆ ตระหนักว่าเราเจอบางอย่างชัดเจนแล้ว "ข้อต่อคลาสสิค #2"™ หลอดไฟจะค่อยๆ ลุกเป็นไฟ ไปที่กำลังไฟ 100% และคงอยู่อย่างนั้น - ไม่ให้แสง 600 องศา เรากลับมาที่แผนความแตกต่างของเราอีกครั้ง U(n) = U(n-1) + Kp*(dE + ...) . ผลต่างที่เหลือคูณด้วยสัมประสิทธิ์สัดส่วนจะถูกบวกเข้ากับมูลค่าที่คำนวณได้ในปัจจุบันของผลกระทบ เรามีจุดตั้งค่า 60 อุณหภูมิ 60 นั่นคือ ความคลาดเคลื่อนเป็นศูนย์ กำลังส่งออกยังเป็นศูนย์ แล้วค่าที่ตั้งไว้ก็เพิ่มขึ้นในทันทีเป็น 600 องศา ความคลาดเคลื่อนอย่างรวดเร็วกลายเป็น 540 องศาพวกเขายังคูณด้วยปัจจัยสัดส่วน ... และบินออกจากความจุ U (n) อย่าหัวเราะ ใช้คณิตศาสตร์จุดคงที่แทนจุดลอยตัว ด้วยความแตกต่าง 540 องศาและทำงานจนถึง 1/16 ด้วยตัวประกอบสัดส่วน 20 เราจะได้ ... 540 * 20 * 16 = 172800 และถ้าเรามี U (n) 16 บิตและแม้แต่เครื่องหมาย อันที่จริงแล้วจากการคำนวณเราได้ A300h = -8960 โอพัคกี้. แทนที่จะเป็นบวกใหญ่ - ลบอย่างเป็นรูปธรรม บทสรุป #2: การคำนวณต้องทำด้วยการสนับสนุนโอเวอร์โฟลว์ที่ถูกต้อง ล้น? จำกัดจำนวนจำกัดอย่าห่อ ดังนั้นเราจึงเพิ่มความลึกของบิต U (n) แปลใหม่ เย็บขึ้น เราเปิดตัว หลอดไฟยังไม่เย็นลงอย่างสมบูรณ์ มันอยู่ที่ 80 องศา การตั้งค่ายังคงที่ 600 หลอดไฟสว่างขึ้น ... และดับลง มันสว่างขึ้นและออกไป ได้อย่างไร? การตั้งค่าคือ 600 หลอดไฟคือ 80 - และมันยังคงความเป็นตัวของมันเอง 80 ได้ค่อนข้างดี! เป็นยังไงบ้าง! ออกมาได้แน่นอน บัก #3. และอีกครั้ง การพูดนอกเรื่องเชิงคณิตศาสตร์-เชิงโคลงสั้น ๆ ดังนั้น มีรูปแบบความแตกต่างของเรา: U(n) = G(U(n-1), dE(n)) อีกครั้งหนึ่ง: ค่าใหม่ของผลกระทบคือผลรวมของผลกระทบในอดีตและผลกระทบบางอย่าง ขึ้นอยู่กับความแตกต่างระหว่างสิ่งที่เหลืออยู่ในขณะปัจจุบันและครั้งก่อน ช่วงเวลาก่อนหน้าคืออะไร? และช่วงเวลาก่อนหน้าของช่วงเวลาก่อนหน้าคืออะไร? ดีจำโรงเรียน พิสูจน์โดยการเหนี่ยวนำ หากเป็นไปได้ที่จะสร้างการพิสูจน์สำหรับ K+1 โดยสมมติว่าการพิสูจน์สำหรับ K นั้นถูกต้อง และพิสูจน์แยกกันว่าอะไรจริงสำหรับ K=0 แล้วการพิสูจน์ก็เป็นจริง เราจะคำนวณ U(0) ได้อย่างไร? วิธีแก้ปัญหาทั่วไป: รีเซ็ตทุกอย่าง อ่านค่าเซ็ตพอยต์จากหน่วยความจำแฟลชและเซ็ตพอยต์ รอ 1 รอบโพล และอ่าน X(0) ที่นี่ศูนย์พร้อมแล้วตอนนี้เรากำลังทำงาน และ... และไม่ถูกต้อง ทำไม เนื่องจากสูตรที่เกิดซ้ำจะถูกขับไล่โดยการเปลี่ยนแปลงของสารตกค้าง และเมื่อเริ่มต้นด้วยศูนย์และโหลดค่าปัจจุบัน เราก็สูญเสียเงื่อนไขเริ่มต้นไป แค่นั้นแหละ - แทนที่จะรักษาค่าอุณหภูมิสัมบูรณ์ไว้ที่ระดับที่เท่ากับค่าที่ตั้งไว้สัมบูรณ์ ตัวควบคุมจะเริ่มรักษาอุณหภูมิให้เท่ากับอุณหภูมิเริ่มต้นบวกกับความแตกต่างของจุดตั้งค่า นั่นคือมันคือ 80 องศาและการตั้งค่าคือ 200 เปิดอุปกรณ์ - ถือ 80 เปลี่ยนการตั้งค่าเป็น 240 - เริ่มถือ 120 การเริ่มต้นที่เหมาะสมของรูปแบบความแตกต่าง: ตั้งค่า _ทุกอย่าง_ เป็นศูนย์ นั่นคือ บทสรุป #3: เริ่มต้นเงื่อนไขการเริ่มต้นอย่างถูกต้อง ถูกมั้ย? เอาล่ะดี ... อีกครั้ง ... เราตั้งค่าเป็น 20 เรากำลังรอการระบายความร้อน ... เราปิด เปิด. ความงาม: ปัจจุบัน 20, เซ็ตพอยต์ 20. เซ็ตกระโดด 600. มาอุ่นเครื่องกัน 100, 120 ... ตั้งค่าเป็น 20 ปิดแล้วเย็นลง เรากำลังรอสักครู่ (120… 110… 100… 90… 80…) และตั้งค่าเป็น 100 มาอุ่นกันเถอะ… 105 องศาปิดแล้ว หยุด. และทำไมมันถือ 105? สำหรับเรา ตอนนี้มีเพียงองค์ประกอบตามสัดส่วนเท่านั้นที่ใช้งานได้ ด้วยการใช้งานที่ถูกต้องจากความหมายทางกายภาพของกระบวนการ กระบวนการแกว่งไม่สามารถรักษาการตั้งค่าให้สูงกว่าที่ตั้งไว้ได้ ด้านล่างอย่างเคร่งครัด และถือได้มากกว่าที่ขอไว้ 5 องศา เป็นที่สังเกต เล่นตลก #4. ดังนั้น มาจำสิ่งที่เรามีข้างต้น: Conclusion #2: U(n) can be unlimited. และข้อสรุปที่ 3: กรณีน้ำล้นยังต้องจำกัด ใช่ ๆ. มิฉะนั้น “จุดทำงาน” จะเปลี่ยนไปในช่วงเวลาจำกัด จะทำอย่างไร? เพิ่มอันดับ? ถ้ามีกำลังประมวลผลเพียงพอ จำเป็นหรือไม่? ที่จริงแล้วมันผิดตรงไหนที่มี U(n) = 9999.99 ไม่ใช่ 29999.99? โดยทั่วไปแล้วเราสูญเสียไป 20,000 เท่านั้น แต่ตอนนี้ ในการทำงาน เราแค่ต้องพังทลายในพลังทั้งหมด 100% ใช่ไหม? อย่างถูกต้อง ซึ่งหมายความว่าไม่มีปัญหากับข้อ จำกัด ในกองทหารตราบใดที่เราไม่ย้ายออกจากขีด จำกัด ดังนั้น ในกรณีโอเวอร์โฟลว์ ต้องตั้งค่าแฟล็ก และเมื่อไปถึง ตัวอย่างเช่น ครึ่งหนึ่งของช่วง (นั่นคือ เมื่อ U (n) หลังจาก 9999.9 ลดลงต่ำกว่า 5000.00) ให้เริ่มต้นวงจรอีกครั้ง นั่นคือทิ้งประวัติโดยบอกว่า n=0 และดูบทสรุปที่ 3 ด้านบน จิตที่ใคร่ครวญได้ตระหนักแล้วว่าในคดี โครงการที่สมบูรณ์เมื่อองค์ประกอบทั้งสามไม่เท่ากับศูนย์ ทำให้กระบวนการวนซ้ำเป็นโมฆะในกระบวนการ เรายังทำให้อินทิกรัลสะสมของส่วนประกอบอินทิกรัลเป็นโมฆะด้วย อย่างไรก็ตาม เนื่องจากเรารีเซ็ตเป็นศูนย์ล่วงหน้ามาก มันจะมีเวลาสะสมในช่วงเวลาของการผลิตเพิ่มเติมของส่วนที่เหลือ และไม่ถูกต้องทั้งหมดที่จะสะสมอินทิกรัลบนสเตจ "ใหญ่" เนื่องจากจุดประสงค์ของส่วนประกอบอินทิกรัลคือการ "เลือก" ความคลาดเคลื่อนที่ส่วนประกอบตามสัดส่วนไม่สามารถแยกออกมาต่างหากได้ บทสรุป #4: ถ้าด้วยเหตุผลบางอย่าง U(n) ถูกจำกัด วงจรควรจะเริ่มต้นใหม่ทันทีที่วงจรดูเหมือนจะกลับมาเป็นปกติ ในฉบับต่อไป: จำเป็นต้องใช้รูปแบบความแตกต่างหรือไม่? การใช้งานโดยละเอียดของวงจรแบบไม่ต่อเนื่องโดยตรงพร้อมค่าสัมประสิทธิ์ที่ปรับได้ที่เรียบง่ายและเข้าใจได้ โดยมีความหมายทางกายภาพโดยตรง ซึ่งคำนวณการดำเนินการควบคุมที่ความถี่ 25Hz บนโปรเซสเซอร์ ADuC847 อย่างง่ายดาย (ตัวควบคุม 8 บิตที่รวดเร็วพร้อมแกน 8051) ทิ้งไว้ เวลา CPU มากสำหรับกระบวนการอื่น (รูปภาพแสดงสูตรมาจากบทความส่งงานที่ดีของคุณในฐานความรู้เป็นเรื่องง่าย ใช้แบบฟอร์มด้านล่าง
เอกสารที่คล้ายกัน
โดยที่ E(n) = X(n) - X0(n) - นั่นคือขนาดของความไม่ตรงกันระหว่างค่าปัจจุบันและค่าที่ตั้งไว้ของพารามิเตอร์ควบคุม
การใช้สูตรแบบเรียกซ้ำทำให้สามารถลดจำนวนการคำนวณและความลึกบิตของค่ากลางได้
ถ้า Un< Umin then Un:= Umin; if Un>Umax แล้ว Un:= Umax;
หลังจากนั้น Un ที่คำนวณได้คือกำลังขับที่ต้องการในขณะปัจจุบัน ตาดำ! การใช้งานนี้ทำให้เกิดข้อผิดพลาดที่อธิบายไว้ข้างต้น
เราเปิดเครื่องควบคุมตรวจสอบ: อุณหภูมิปัจจุบันคือ 22 องศาการตั้งค่าคือ 16 องศา หลอดไฟไม่สว่าง
เราเริ่มเพิ่มการตั้งค่า: 16.1, 16.4, 17, 18, 20, 22, 24 (อ๊ะ! สว่างขึ้น! ไชโย!), 28, 30, 40, 60 ... ความงาม! ได้ผล!
เรากำลังดูกระบวนการ - ปรากฏว่าประมาณ 60 มันห้อยไปมาเล็กน้อย แต่ก็ยังคงอยู่ ดูเหมือนทุกอย่างจะสวยงาม เราหายใจออกตรวจสอบการควบคุมจากพีซี: เราตั้งไว้ที่ 600 องศา และ... ไฟดับลง ได้อย่างไร? Setpoint 600 ปัจจุบัน 60 แต่ไฟดับ?
X(0) = 0, X0(0) = 0. U(0) = 0. E(0)=X(0)-X0(0)=0.
และในรอบแรกของการคำนวณ ค่าที่ตั้งไว้และค่าปัจจุบันก็ปรากฏขึ้นอย่างกะทันหัน:
X(1) = 80. X0(1)=200. U(1) = U(0)+Kp*(E(1)-E(0)) = U(0)+Kp*(X(1)-X0(1)-E(0)) = 0 + 20*(200 - 80 - 0) = 2400
ตอนนี้วงจรทำงานอย่างถูกต้อง
เราแนะนำให้คุณอ่าน
 ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น
ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่
การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่ การวินิจฉัยการรักษาการรักษา urogenital chlamydia") Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia
Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร
ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร

