เครื่องยนต์ กระแสตรง(อปท.)
อุปกรณ์:
1. สเตเตอร์ (ตัวเหนี่ยวนำ)
2. โรเตอร์ (สมอ)
สเตเตอร์ประกอบด้วย: ตัวเรือน, วงจรแม่เหล็กในรูปของเสา, ซึ่งเป็นที่ตั้งของขดลวดกระตุ้น
ตัวเหนี่ยวนำตั้งชื่อส่วนของเครื่องที่ออกแบบเพื่อสร้างสนามแม่เหล็ก
โรเตอร์ประกอบด้วย: เพลา, วงจรแม่เหล็ก, ในร่องที่มีขดลวดและตัวสะสมพร้อมแปรง
เครื่องหมาย:

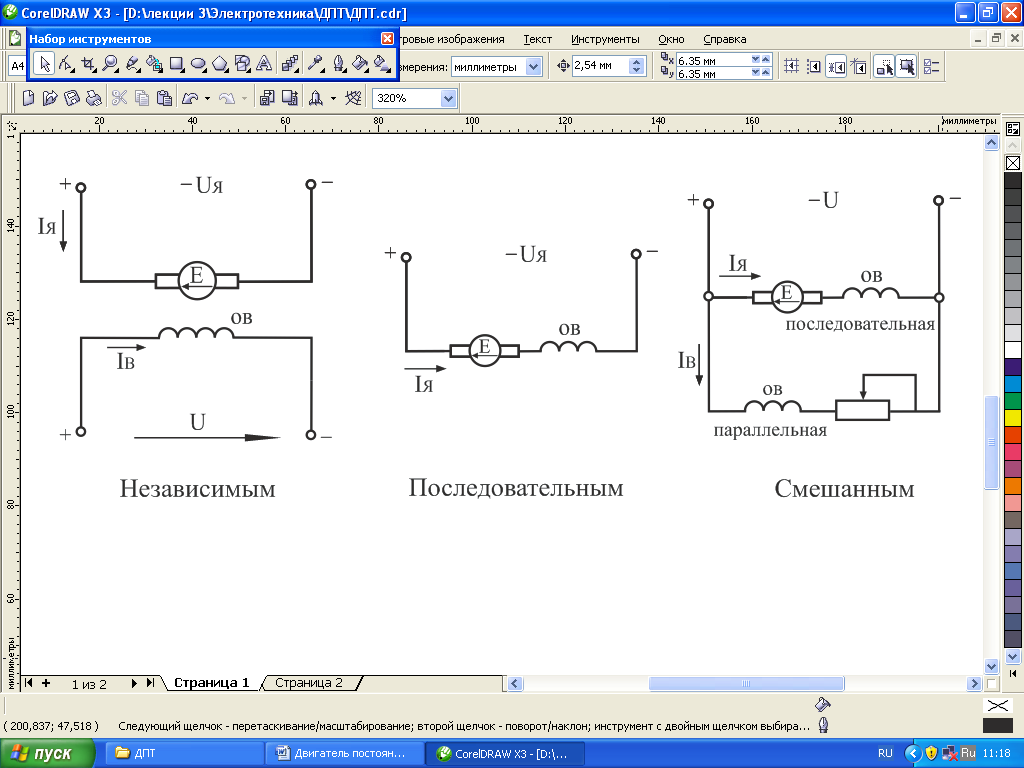
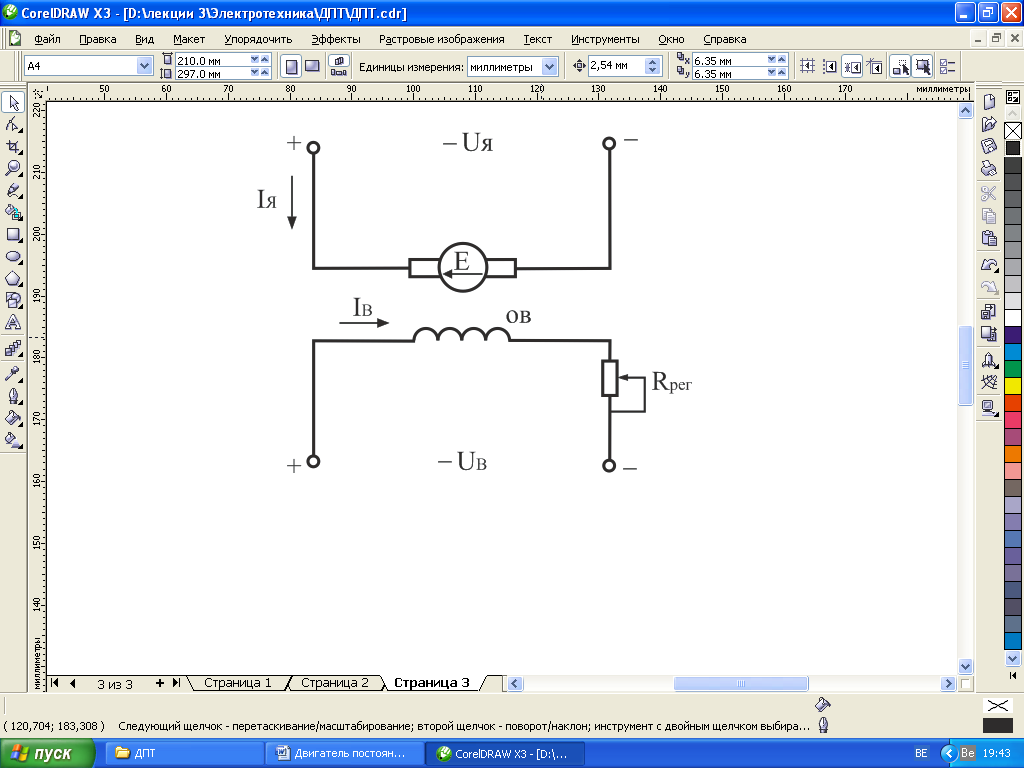
แผน DPT ด้วย หลากหลายชนิดกระตุ้น:
หลักการทำงาน:
ยูวี → ฉัน วี → ฉ;
โดยที่ I V - กระแสกระตุ้น; ผม ผม - กระแสเกราะ
ปฏิสัมพันธ์ของกระแสกระดองกับฟลักซ์แม่เหล็ก F ของสเตเตอร์สร้าง แรงบิด:
โดยที่ CM เป็นปัจจัยการออกแบบ
ภายใต้การกระทำของ M โรเตอร์เริ่มหมุนขณะข้ามเส้นแรง สนามแม่เหล็กอันเป็นผลมาจากการเหนี่ยวนำให้เกิด EMF ซึ่งเรียกว่า EMF ของการหมุน:
สมการ DPT พื้นฐาน:
เป็นสมการสมดุลไฟฟ้าของโรเตอร์:
แรงดันตกในวงจรกระดองอยู่ที่ไหน คือ EMF ของการหมุน
จากสูตรนี้ เราได้รับความสัมพันธ์ที่สำคัญในทางปฏิบัติ:
ทดแทนแทน
และเราได้รับ:
![]() .
.
ตามนิพจน์นี้ เป็นไปได้ที่จะสร้างลักษณะทางกลของ DPT n \u003d f (M) เมื่อพิจารณาจากโหลด นั่นคือ M คุณสามารถค้นหาความเร็วในการหมุนที่สอดคล้องกับมัน หากในเวลาเดียวกัน U = U nom, Ф = Ф nom เรามีคุณสมบัติทางกลตามธรรมชาติ
ลักษณะทางกลของ DPT:
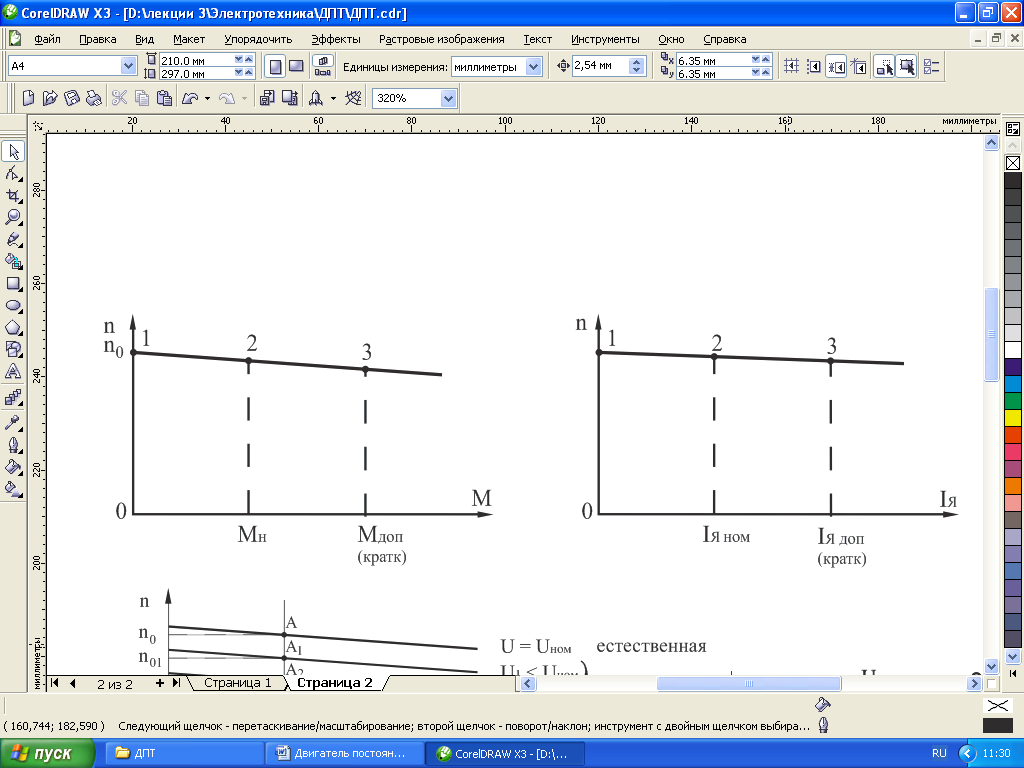
จุด "1" - ไม่ทำงาน; พิกัด М = 0, n = n 0 ;
"2" - โหมดระบุ; พิกัด M n, n n;
"3" - โหลดระยะสั้นสูงสุดที่อนุญาต
โครงเรื่องที่ 1–2 - อนุญาตให้ทำงานระยะยาวได้
ส่วนที่ 2–3 - อนุญาตเฉพาะงานระยะสั้นเท่านั้น
โดยปกติฉันเพิ่ม \u003d (2 ÷ 2.5) ฉันชื่อ
การควบคุมความเร็ว DPT:
![]() ,
,
ความต้านทานของโซ่สมออยู่ที่ไหน
มันมาจากไหน ความเป็นไปได้ของการควบคุมความเร็วในสามวิธี: , , .
1. พิจารณาลักษณะทางกลเทียมในการควบคุมความเร็ว โดยการเปลี่ยนอินพุต
แน่นอน ตามสภาพการทำงานของเครื่องยนต์ สามารถเปลี่ยนได้เฉพาะในทิศทางของการลดลง ดังนั้น ความเร็วรอบเครื่องยนต์จะปรับลงได้เท่านั้น ในขณะที่ความเร็วรอบเดินเบา (จุด "1") จะลดลง
ลักษณะจะอยู่ในรูปแบบ:
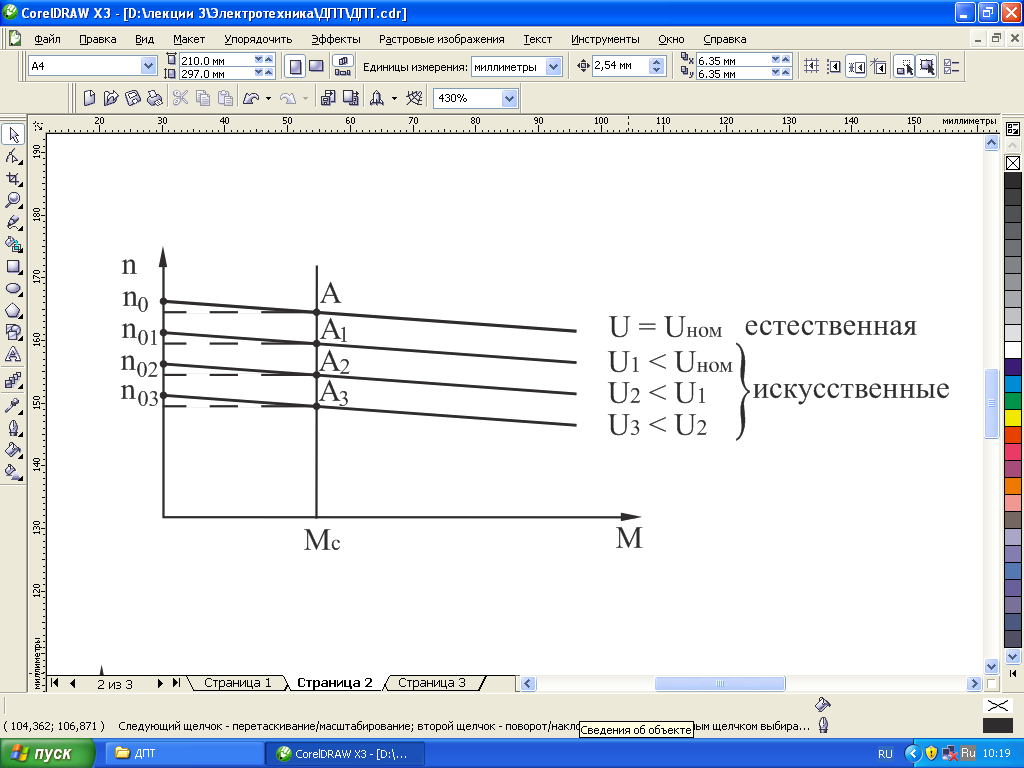
หากภาระของเครื่องยนต์แสดงโดยลักษณะ MC จากนั้นการเปลี่ยนแรงดันไฟฟ้าจากเป็นคุณจะได้รับความเร็วที่แตกต่างจาก n A เป็น n A3
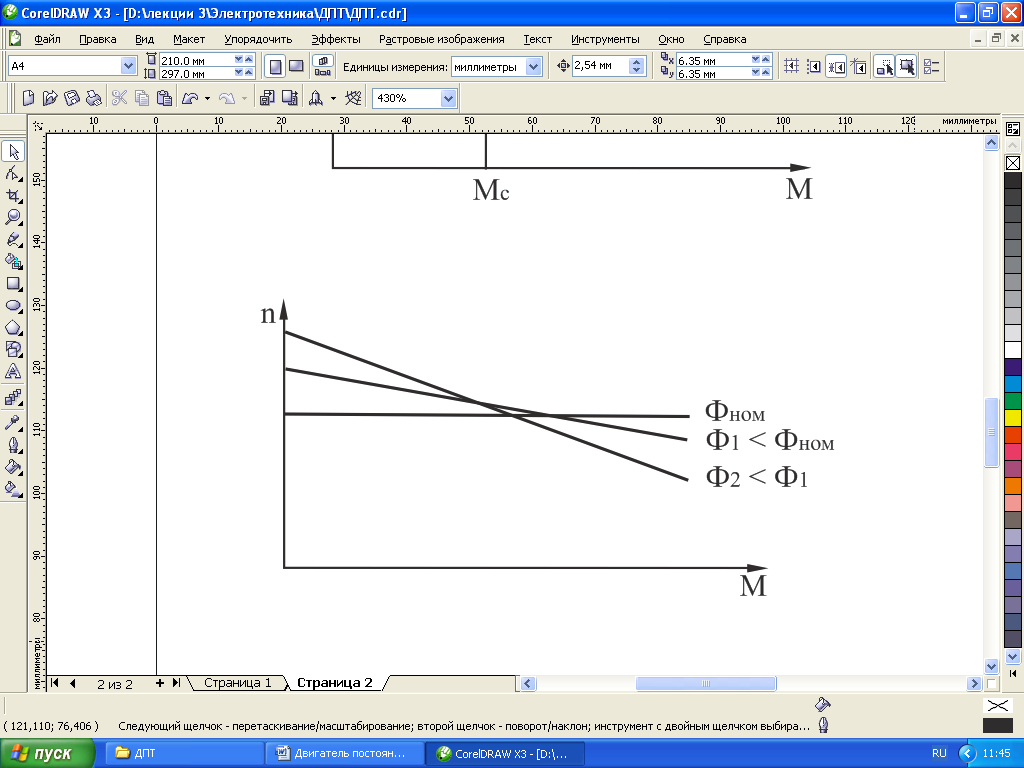
2. ควบคุมความเร็วโดย การเปลี่ยนแปลงขนาดของฟลักซ์แม่เหล็ก
ขนาดของฟลักซ์แม่เหล็กสามารถเปลี่ยนแปลงได้โดยใช้กระแส I V เช่น รีโอสแตตในทิศทางที่ลดลงเท่านั้น ฟลักซ์แม่เหล็กที่ลดลงจะทำให้ความเร็วเพิ่มขึ้น ดังนั้นด้วยฟลักซ์แม่เหล็ก จึงสามารถปรับความเร็วขึ้นได้เท่านั้น
3. พิจารณาลักษณะทางกลในการควบคุมความเร็ว เปลี่ยนความต้านทานของโซ่สมอ
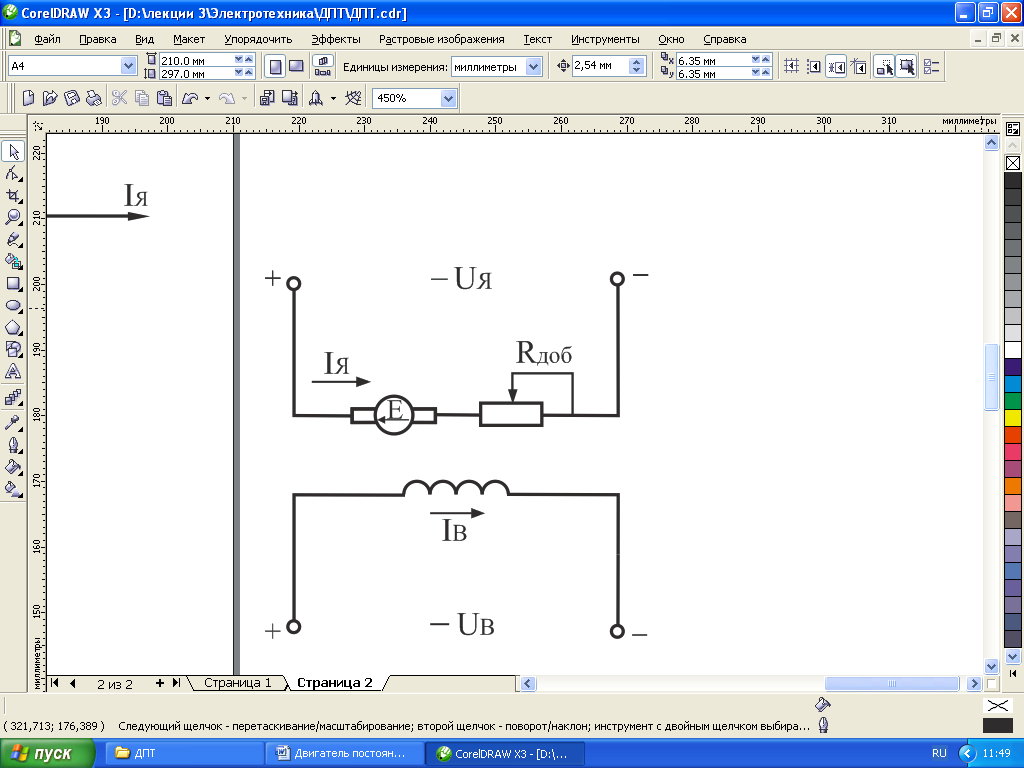
ไม่ขึ้นอยู่กับ R n ดังนั้นลักษณะประดิษฐ์จึงมีจุดร่วม .
กระแสเริ่มต้นเมื่อ n = 0 และ E = 0 มีรูปแบบและมีค่ามากจนไม่สามารถยอมรับได้ ซึ่งไม่อนุญาตให้สตาร์ทเครื่องยนต์ เพื่อลดกระแสเริ่มต้นจะมีการแนะนำความต้านทานเพิ่มเติมในวงจรกระดอง:
ปัจจุบันลดลงและลักษณะมีรูปแบบ:

หลักการทำงาน (ในตัวอย่างเครื่องยนต์ การกระตุ้นแบบขนาน). หากใช้แรงดันไฟฟ้า U กับมอเตอร์ กระแส I c ไหลผ่านวงจรกระตุ้น และกระแส I ผม ไหลผ่านวงจรกระดอง กระแสกระตุ้นสร้าง MMF F ใน = I ใน W ซึ่งกระตุ้นฟลักซ์แม่เหล็กในเครื่อง F นิ้ว ในทางกลับกันกระแสเกราะจะสร้างฟลักซ์แม่เหล็กของปฏิกิริยากระดอง F i ฟลักซ์แม่เหล็กที่เกิดขึ้น F res \u003d F ใน + F ผม
รูปที่1.23 1.24
ในวงจรกระดองกระแส ผม ผม สร้างแรงดันตก R ผม ผม ผม. ตามกฎของแรงแม่เหล็กไฟฟ้า EMC เมื่อกระแส I I และฟลักซ์แม่เหล็ก F res โต้ตอบกัน แรงบิด M BP จะถูกสร้างขึ้น ในสภาวะคงตัว อุณหภูมิ M \u003d M pr เมื่อตัวนำกระดองข้ามสนามแม่เหล็ก F res ตามกฎของการเหนี่ยวนำแม่เหล็กไฟฟ้า EMP จะเหนี่ยวนำให้เกิด EMF ซึ่งพุ่งตรงต่อแรงดันไฟหลัก U
การจำแนกประเภทของเครื่องยนต์ ตามวงจรสำหรับการเปิดขดลวดกระตุ้นของเสาหลัก มอเตอร์กระแสตรงแบ่งออกเป็นมอเตอร์อิสระ ขนาน ซีรีส์และกระตุ้นแบบผสม
ในเครื่องยนต์ การกระตุ้นอิสระขดลวดกระตุ้นนั้นขับเคลื่อนโดยแหล่งจ่ายแรงดันไฟตรงที่แยกจากกัน ในมอเตอร์กระตุ้นแบบขนาน ขดลวดสนามและขดลวดกระดองเชื่อมต่อแบบขนานและขับเคลื่อนจากแหล่งเดียวกัน ในซีรีย์และมอเตอร์กระตุ้นแบบผสม มีขดลวดกระตุ้นที่เชื่อมต่อแบบอนุกรมกับขดลวดกระดอง ในมอเตอร์กำลังต่ำ สามารถสร้างฟลักซ์กระตุ้นได้โดยใช้แม่เหล็กถาวร มอเตอร์ของการกระตุ้นแบบขนานและแบบผสมพบการใช้งานที่ยิ่งใหญ่ที่สุด
สมการพื้นฐานและปริมาณการจำแนกลักษณะเครื่องยนต์ ค่าเหล่านี้คือ: พลังงานกลบนเพลา P 2, แรงดันไฟฟ้า U, กระแสที่ใช้จากเครือข่าย I, กระแสเกราะ I I, กระแสกระตุ้น I ใน, ความเร็วในการหมุน n, โมเมนต์แม่เหล็กไฟฟ้าอืม. มีการอธิบายความสัมพันธ์ระหว่างปริมาณเหล่านี้:
Ø สมการแรงบิดแม่เหล็กไฟฟ้า:
M em \u003d C m ฉัน I F;
Ø โดยสมการสถานะไฟฟ้าของวงจรกระดอง:
U \u003d E pr + R ฉัน ฉัน ฉัน; (1.4)
E pr \u003d C E nФ;
Ø สมการโมเมนต์:
M em \u003d M s + M เหงื่อ + M d
โดยที่ M s คือโมเมนต์ความต้านทานบนเพลาที่เกิดจากโหลด M เหงื่อ - ช่วงเวลาของการสูญเสียที่เกิดจากการสูญเสียทุกประเภทในเครื่องยนต์ M d - โมเมนต์ไดนามิกที่สร้างขึ้นโดยแรงเฉื่อย
ลักษณะของเครื่องยนต์ ลักษณะที่สำคัญที่สุดคือกลไก n (M s) - การพึ่งพาความเร็วการหมุน n กับแรงบิดบนเพลา (ต่อไปนี้จะละดัชนี "c") ที่ U = const, I в = const ซึ่งแสดงให้เห็นอิทธิพลของภาระทางกล (แรงบิด) บนเพลามอเตอร์ที่มีต่อความเร็ว ซึ่งเป็นสิ่งสำคัญอย่างยิ่งที่ต้องทราบเมื่อเลือกและใช้งานมอเตอร์ ลักษณะเครื่องยนต์อื่น ๆ : การปรับ n (I c), ความเร็วสูง n (I i), การทำงาน M, R 1, n, I, h (R 2) - ไม่ได้รับการพิจารณาอย่างละเอียด
ลักษณะทางกลสามารถเป็นธรรมชาติหรือประดิษฐ์ ภายใต้ เป็นธรรมชาติลักษณะเป็นที่เข้าใจกันว่าเป็นลักษณะที่เกิดขึ้นในกรณีที่ไม่มีความต้านทานเพิ่มเติมในวงจรเช่น rheostat ในอาร์เมเจอร์หรือวงจรกระตุ้น เทียม- เมื่อมีแนวต้านดังกล่าว
สมการทางกลลักษณะเครื่องยนต์ สามารถหาได้จาก (1.1) เราแทนค่า E แทนค่าใน (1.4) แล้ว
n \u003d (U - R i I i) / C E F. (1.5)
แทนที่ I i ด้วยค่าจาก (1.2) เราจะได้สมการ ลักษณะทางกล:
n= ![]() (1.6)
(1.6)
ประเภทของคุณสมบัติทางกลถูกกำหนดโดยธรรมชาติของการพึ่งพาฟลักซ์บนโหลดของมอเตอร์ซึ่งจะขึ้นอยู่กับวงจรสำหรับการเปิดขดลวดกระตุ้น
การพลิกกลับของเครื่องยนต์ การพลิกกลับของเครื่องยนต์เป็นที่เข้าใจกันว่าเป็นการเปลี่ยนแปลงในทิศทางของการหมุนของเกราะ วิธีที่เป็นไปได้ในการย้อนกลับตามความสัมพันธ์ (1.2) หากคุณเปลี่ยนทิศทางของกระแสเกราะหรือการไหลของเครื่อง เครื่องหมายและทิศทางของแรงบิดก็จะเปลี่ยนไป ในทางปฏิบัติ ทำได้โดยการเปลี่ยนสายนำหรือขดลวดกระดอง หรือขดลวดกระตุ้น อย่างไรก็ตาม การสลับเอาท์พุตของขดลวดทั้งสองพร้อมกันหรือการเปลี่ยนแปลงขั้วของแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์ (ยกเว้นมอเตอร์กระตุ้นอิสระ) จะไม่ทำให้เกิดการเปลี่ยนแปลงในเครื่องหมายของแรงบิด ดังนั้นจึงทำให้เกิดการเปลี่ยนแปลงใน ทิศทางการหมุน
สตาร์ทเครื่องยนต์กระแสตรง. ข้อกำหนดหลักสองประการสำหรับการสตาร์ทเครื่องยนต์: เพื่อให้เกิดแรงบิดที่จำเป็นสำหรับการสตาร์ทและการเร่งความเร็วของกระดอง และเพื่อป้องกันการไหลมากเกินไปผ่านเกราะระหว่างการสตาร์ทเครื่อง กระแสสูงเป็นอันตรายต่อเครื่องยนต์ สามวิธีในการสตาร์ทเป็นไปได้จริง: สตาร์ทโดยตรง สตาร์ทเมื่อรีโอสแตทเชื่อมต่อกับวงจรกระดอง และเริ่มต้นด้วย สวนท่งในห่วงโซ่สมอ
เมื่อเริ่มต้นโดยตรง วงจรกระดองจะเปิดขึ้นเป็นแรงดันไฟฟ้าเต็มทันที เนื่องจากในช่วงแรกของการเริ่มต้นอาร์เมเจอร์นั้นหยุดนิ่ง (n = 0) จึงไม่มีแบ็คเอ็มเอฟ (E pr = C E nF) จากนั้นจาก (1.4) ตามด้วยกระแสเริ่มต้นของกระดอง I i, p \u003d U / R i
ตั้งแต่ R i \u003d 0.02 ¸ 1.10 Ohm แล้ว I i n \u003d (50 ¸ 100) ฉัน nom ซึ่งเป็นที่ยอมรับไม่ได้ ดังนั้นการเริ่มต้นโดยตรงจึงเป็นไปได้เฉพาะสำหรับมอเตอร์ที่ใช้พลังงานต่ำเท่านั้น โดยที่ฉัน ฉัน n (4¸6) ฉัน nom และการเร่งความเร็วของมอเตอร์ใช้เวลาน้อยกว่า 1 วินาที
การเริ่มต้นเมื่อรีโอสแตทเริ่มต้น R p ถูกเปิดเป็นอนุกรมโดยอาร์เมเจอร์จะพิจารณาโดยใช้ตัวอย่างของวงจรในรูปที่ 1.25. กระแสเริ่มต้นในกรณีนี้คือ:
ฉัน ฉัน p \u003d U / (R ฉัน + R p) (1.7)
ความต้านทาน R p \u003d U / I i, p - R i ถูกเลือกเพื่อให้ในช่วงเวลาเริ่มต้นของการเริ่มต้นเมื่อ E pr \u003d 0, I i, p \u003d (1.4¸2.5) ฉันชื่อ (จำนวนที่มากกว่าหมายถึง ให้กับเครื่องยนต์ที่มีกำลังน้อย)
เมื่อกระดองเร่งขึ้น E pr จะเพิ่มขึ้น ซึ่งลดแรงดันไฟฟ้าที่อาร์มาเจอร์ (เช่น ตัวเศษ (1.7) ลดลง) และความต้านทานของลิโน่ R p จะถูกส่งออก
ก่อนที่จะเริ่มต้น rheostat R p จะปรากฏขึ้นซึ่งจำเป็นเพื่อให้แน่ใจว่ามีการไหลสูงสุดและดังนั้นแรงบิดเมื่อเริ่มต้น (M p \u003d C m I I, p F) เมื่ออาร์เมเจอร์เร่งความเร็ว รีโอสแตท R p จะถูกแนะนำจนกระทั่งถึงความเร็วที่ต้องการ
การเริ่มต้นด้วยกระแสเริ่มต้นที่ จำกัด เป็นไปได้เมื่อเกราะของมอเตอร์ขับเคลื่อนจากแหล่งแยกต่างหาก (เครื่องกำเนิดไฟฟ้า, วงจรเรียงกระแส) พร้อมแรงดันไฟฟ้าที่ปรับได้ การเริ่มต้นข้อ จำกัด กระแสไฟและการเร่งความเร็วที่ราบรื่นของมอเตอร์นั้นมาจากการเพิ่มแรงดันกระดองทีละน้อยจากศูนย์เป็นค่าที่ต้องการ
วิธีการที่อยู่ระหว่างการพิจารณาพบการประยุกต์ใช้ในระบบควบคุมและควบคุมของมอเตอร์กระแสตรงกำลังสูง (ดูข้อ 1.14.3)
§ 115. ลักษณะของมอเตอร์กระแสตรง
คุณสมบัติการทำงานของเครื่องยนต์ถูกกำหนดโดยลักษณะการทำงานซึ่งขึ้นอยู่กับจำนวนรอบการหมุน t, แรงบิด Me, กระแสไฟที่ใช้ I, กำลัง P1 และประสิทธิภาพ η ต่อกำลังที่มีประโยชน์บนเพลา P2- การพึ่งพาเหล่านี้สอดคล้องกับธรรมชาติ เงื่อนไขของเครื่องยนต์ กล่าวคือ เครื่องไม่ได้รับการควบคุมและแรงดันไฟหลักยังคงที่ ดังนั้น
เช่นเดียวกับการเปลี่ยนแปลงพลังงานที่มีประโยชน์ P2 (เช่นภาระบนเพลา) กระแสในกระดองก็เปลี่ยนไปเช่นกัน
เครื่อง ลักษณะการทำงานมักจะถูกวางแผนเป็นหน้าที่ของกระแสเกราะ การพึ่งพาของแรงบิดและความเร็วของการหมุนของกระแสในอาร์มาเจอร์สำหรับมอเตอร์ของการกระตุ้นแบบขนานจะแสดงในรูปที่ 152 และแผนภาพหนึ่งร้อยแสดงไว้ด้านบน (ดูรูปที่ 151)
ความเร็วของเครื่องยนต์ถูกกำหนดโดยนิพจน์ต่อไปนี้:
> ด้วยการเพิ่มภาระบนเพลามอเตอร์ กระแสในกระดองก็เพิ่มขึ้นเช่นกัน สิ่งนี้ทำให้แรงดันไฟฟ้าตกเพิ่มขึ้นตามความต้านทานของขดลวดกระดองและหน้าสัมผัสแปรง
เนื่องจากกระแสกระตุ้นยังคงที่ (เครื่องไม่มีการควบคุม) ฟลักซ์แม่เหล็กก็คงที่เช่นกัน อย่างไรก็ตาม ด้วยกระแสที่เพิ่มขึ้นในกระดอง ผลของการล้างอำนาจแม่เหล็กของฟลักซ์ปฏิกิริยาของกระดองจะเพิ่มขึ้น และฟลักซ์แม่เหล็ก Ф จะลดลงบ้าง การเพิ่มขึ้นของ Iarya ทำให้ความเร็วของเครื่องยนต์ลดลงและF ลดลงจะเพิ่มความเร็ว โดยทั่วไป แรงดันตกกระทบต่อการเปลี่ยนแปลงความเร็วในระดับที่มากกว่าการตอบสนองของกระดองเล็กน้อย ดังนั้น เมื่อกระแสของกระดองเพิ่มขึ้น ความเร็วจะลดลง การเปลี่ยนแปลงความเร็วของมอเตอร์ประเภทนี้ไม่มีนัยสำคัญและไม่เกิน 5% เมื่อโหลดเปลี่ยนจากศูนย์เป็นค่าเล็กน้อย กล่าวคือ มอเตอร์กระตุ้นแบบขนานมีลักษณะความเร็วที่เข้มงวด
ด้วยฟลักซ์แม่เหล็กคงที่การพึ่งพาแรงบิดของกระแสในกระดองจะแสดงเป็นเส้นตรง แต่อยู่ภายใต้อิทธิพล

แรงบิดของมอเตอร์ปฏิกิริยากระดองที่มีการเพิ่มภาระจะลดลงเล็กน้อยในฟลักซ์แม่เหล็กและการพึ่งพาของโมเมนต์จะต่ำกว่าเส้นตรงเล็กน้อย
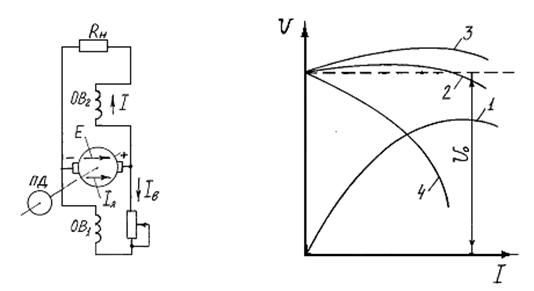
ไดอะแกรมของมอเตอร์กระตุ้นตามลำดับแสดงในรูปที่ 153. รีโอสแตทเริ่มต้นของเครื่องยนต์นี้มีเพียงสองแคลมป์เนื่องจากขดลวดกระตุ้นและกระดองสร้างวงจรหนึ่งชุด ลักษณะของเครื่องยนต์แสดงในรูปที่ 154. ความเร็วรอบเครื่องยนต์ การกระตุ้นตามลำดับถูกกำหนดโดยนิพจน์ต่อไปนี้:
![]()
โดยที่ rc คือความต้านทานของขดลวดกระตุ้นแบบอนุกรม ในมอเตอร์กระตุ้นแบบอนุกรม ฟลักซ์แม่เหล็กจะไม่คงที่ แต่จะเปลี่ยนแปลงอย่างมากตามการเปลี่ยนแปลงของโหลด ซึ่งทำให้ความเร็วเปลี่ยนแปลงอย่างมีนัยสำคัญ เนื่องจากแรงดันตกคร่อมความต้านทานของกระดองและในขดลวดสนามมีขนาดเล็กมากเมื่อเทียบกับแรงดันไฟฟ้าที่ใช้ จำนวนรอบสามารถประมาณได้โดยนิพจน์ต่อไปนี้:
หากเราละเลยความอิ่มตัวของเหล็ก เราก็สามารถพิจารณาฟลักซ์แม่เหล็กตามสัดส่วนกับกระแสในขดลวดสนาม ซึ่งเท่ากับกระแสในกระดอง ดังนั้น สำหรับมอเตอร์กระตุ้นแบบอนุกรม ความเร็วในการหมุนจะแปรผกผันกับกระแสในกระดองและจำนวนรอบการหมุนจะลดลงอย่างรวดเร็วเมื่อโหลดเพิ่มขึ้น กล่าวคือ มอเตอร์มีลักษณะความเร็วที่นุ่มนวล เมื่อโหลดลดลง ความเร็วของเครื่องยนต์จะเพิ่มขึ้น เมื่อรอบเดินเบา (Ia = 0) ความเร็วของเครื่องยนต์จะเพิ่มขึ้นอย่างไม่มีกำหนด กล่าวคือ เครื่องยนต์จะเข้าสู่พิกัดโอเวอร์ไดรฟ์
ดังนั้นคุณสมบัติเฉพาะของมอเตอร์กระตุ้นแบบอนุกรมคือไม่สามารถยอมรับได้ของการกำจัดโหลดเช่นรอบเดินเบาหรือที่โหลดต่ำ เครื่องยนต์มีขั้นต่ำ โหลดที่อนุญาตซึ่งเป็น 25-30% ของชื่อ เมื่อโหลดน้อยกว่าความเร็วขั้นต่ำที่อนุญาตของเครื่องยนต์จะเพิ่มขึ้นอย่างรวดเร็วซึ่งอาจทำให้เกิดการทำลายได้ ดังนั้น เมื่อสามารถปลดหรือลดภาระอย่างกะทันหันได้ การใช้มอเตอร์แบบตื่นเต้นแบบอนุกรมจึงเป็นสิ่งที่ยอมรับไม่ได้
ในมอเตอร์ขนาดเล็กมาก การปลดโหลดจะไม่ทำให้เกิดการหนี เนื่องจากการสูญเสียทางกลของมอเตอร์จะเพียงพอ ภาระหนักสำหรับเขา.
แรงบิดของชุดมอเตอร์กระตุ้นโดยคำนึงถึงความสัมพันธ์ตามสัดส่วนระหว่างฟลักซ์แม่เหล็กและกระแสในกระดอง (F \u003d C "Ia) สามารถกำหนดได้โดยนิพจน์ต่อไปนี้:
โดยที่ K'=KC'
เหล่านั้น. แรงบิดเป็นสัดส่วนกับกำลังสองของกระแส อย่างไรก็ตาม ที่กระแสน้ำสูง ความอิ่มตัวของเหล็กส่งผลกระทบและการพึ่งพาโมเมนต์เข้าใกล้เส้นตรง ดังนั้น เครื่องยนต์ประเภทนี้จะพัฒนาแรงบิดขนาดใหญ่ที่ความเร็วต่ำ ซึ่งเป็นสิ่งสำคัญเมื่อเริ่มต้นมวลเฉื่อยขนาดใหญ่และการโอเวอร์โหลด มอเตอร์เหล่านี้ใช้กันอย่างแพร่หลายในการขนส่งและการยก
ด้วยการกระตุ้นแบบผสม สามารถเปิดทั้งพยัญชนะและตัวนับของขดลวดกระตุ้นได้
มอเตอร์ที่มีขดลวดตรงกันข้ามนั้นไม่ได้ใช้กันอย่างแพร่หลาย เนื่องจากมีคุณสมบัติในการสตาร์ทไม่ดีและไม่เสถียร
ลักษณะความเร็วของมอเตอร์กระตุ้นแบบผสมอยู่ในตำแหน่งกึ่งกลางระหว่างลักษณะของมอเตอร์กระตุ้นแบบขนานและแบบอนุกรม
ด้วยการเพิ่มขึ้นของกระแสกระดอง จำนวนรอบของกระดองจะลดลงในระดับที่มากกว่ามอเตอร์กระตุ้นแบบขนาน เนื่องจากการเพิ่มขึ้นของฟลักซ์แม่เหล็กที่เกิดจากการเพิ่มขึ้นของกระแสในขดลวดสนามแบบอนุกรม เมื่อไม่ทำงาน มอเตอร์กระตุ้นแบบผสมจะไม่ทำงาน เนื่องจากฟลักซ์แม่เหล็กไม่ลดลงจนเป็นศูนย์เนื่องจากการมีขดลวดสนามคู่ขนาน
ด้วยโหลดที่เพิ่มขึ้นในมอเตอร์กระตุ้นแบบผสม ฟลักซ์แม่เหล็กเพิ่มขึ้นและแรงบิดเพิ่มขึ้นในระดับที่มากกว่ามอเตอร์กระตุ้นแบบขนาน แต่มีขอบเขตน้อยกว่ามอเตอร์กระตุ้นแบบอนุกรม
1. อุปกรณ์ของเครื่อง DC
เครื่อง DC ซึ่งสามารถทำงานได้ทั้งแบบมอเตอร์และแบบเครื่องกำเนิดไฟฟ้า มีข้อดีหลายประการ เมื่อสตาร์ทเครื่องยนต์จะเกิดแรงบิดในการสตาร์ทขนาดใหญ่ ดังนั้นเครื่องยนต์ดังกล่าวจึงใช้ iroko เป็นตัวฉุดลากในรถยนต์ไฟฟ้า ขีดจำกัดที่กว้างและความราบรื่นของการควบคุมความเร็วเป็นตัวกำหนดการใช้มอเตอร์กระแสตรงในระบบควบคุมอัตโนมัติที่หลากหลาย
เครื่องกำเนิดไฟฟ้ากระแสตรงใช้สำหรับจ่ายไฟให้กับหน่วยพลังงานต่างๆ (โดยเฉพาะ เครื่องเชื่อมคุณภาพสูง) พลังของเครื่อง DC แตกต่างกันมาก:
จากไม่กี่วัตต์เป็นหลายสิบกิโลวัตต์ ในการขนส่งใช้เครื่องยนต์ที่มีแรงดันไฟฟ้า 550 V และกำลัง 40 - 45 kW (รถราง) ที่มีแรงดันไฟฟ้า 1,500 V และกำลังสูงสุด 12,000 kW (หัวรถจักรไฟฟ้า) ประสิทธิภาพในเครื่อง DC ยิ่งสูง พลังก็ยิ่งมาก ด้วยกำลังไฟสูงถึง 100 W ประสิทธิภาพ = 62% พร้อมกำลังไฟสูงถึง 100 kW ประสิทธิภาพถึง 91% ข้อเสียของเครื่อง DC คือการมีอยู่ของชุดตัวเก็บแปรง ซึ่งเป็นหนึ่งในส่วนประกอบของเครื่องจักรที่ไม่น่าเชื่อถือที่สุด พิจารณาอุปกรณ์ของเครื่อง DC ที่ง่ายที่สุด:
1 - เสาซึ่งมักจะเป็นตัวแทนของขดลวดที่มีแกนกลาง
2 - กระดอง (หรือโรเตอร์) - ส่วนที่หมุนได้
3 - ตัวนำในร่องของเกราะ
ส่วนยึดที่ยึดกับเสาเรียกว่าสเตเตอร์หรือตัวเหนี่ยวนำ ตัวเหนี่ยวนำทำหน้าที่สร้างสนามแม่เหล็กหลักของเครื่อง GN - เรขาคณิตเป็นกลาง เส้นผ่านตรงกลางระหว่างเสาที่อยู่ติดกัน
คุณสมบัติการออกแบบที่สำคัญที่สุดของเครื่อง DC คือการมีชุดตัวเก็บแปรง: 1 - แปรง 2 - แผ่นสะสม เอาต์พุตของแต่ละส่วนของขดลวดกระดองนั้นเหมาะสำหรับแผ่นสะสม หน่วยเก็บแปรงทำงาน:
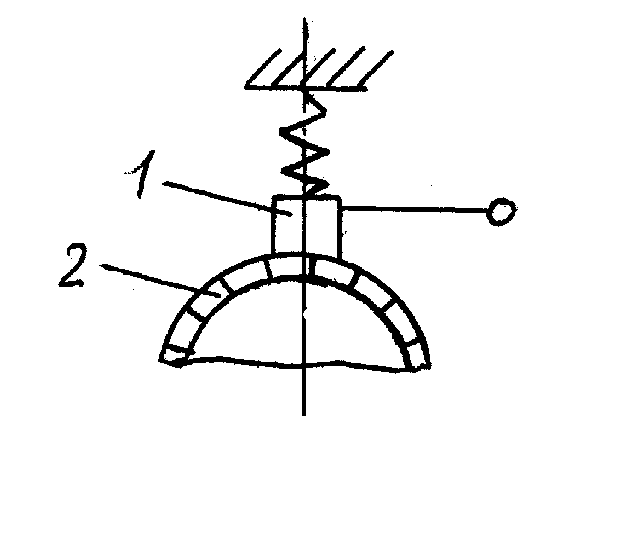
หน้าสัมผัสแบบเลื่อนระหว่างสายนำด้านนอกคงที่และส่วนที่หมุนได้ของขดลวดกระดอง
การแก้ไขกระแสในโหมดเครื่องกำเนิดไฟฟ้า
การแปลงกระแสตรงเป็นกระแสสลับ (อินเวอร์เตอร์) ในโหมดมอเตอร์
เครื่อง DC เช่นเดียวกับเครื่องจักรไฟฟ้าอื่น ๆ สามารถย้อนกลับได้เช่น เครื่องเดียวกันสามารถทำงานได้ทั้งเครื่องกำเนิดไฟฟ้าและเครื่องยนต์
2. หลักการทำงานของเครื่องกำเนิดไฟฟ้าและเครื่องยนต์
ในโหมดเครื่องกำเนิดไฟฟ้า เกราะของเครื่องจะหมุนภายใต้อิทธิพลของโมเมนต์ภายนอก ระหว่างขั้วของสเตเตอร์มีฟลักซ์แม่เหล็กคงที่ที่เจาะเกราะ ตัวนำขดลวดของกระดองเคลื่อนที่ในสนามแม่เหล็กและดังนั้นจึงมี EMF เกิดขึ้นซึ่งทิศทางสามารถกำหนดได้โดยกฎ "มือขวา" ในกรณีนี้ แปรงตัวหนึ่งจะมีโอกาสเป็นบวกซึ่งสัมพันธ์กับแปรงอันที่สอง หากโหลดเชื่อมต่อกับขั้วของเครื่องกำเนิดไฟฟ้ากระแสจะไหลเข้าไป หลังจากหมุนเกราะในมุมหนึ่งแล้ว แปรงจะเชื่อมต่อกับเพลตอีกคู่หนึ่ง กล่าวคือ เชื่อมต่อกับขดลวดกระดองอีกอัน EMF ซึ่งจะมีทิศทางเดียวกัน ดังนั้นเครื่องกำเนิดจะสร้าง
กระแสไฟฟ้าและทิศทางของกระแสที่ไหลผ่านโหลดนี้จะไม่เปลี่ยนแปลง
เมื่อโหลดเชื่อมต่อกับเครื่องกำเนิดไฟฟ้าและด้วยการถือกำเนิดของกระแสกระดอง แรงบิดแม่เหล็กไฟฟ้าจะเกิดขึ้นบนเพลาซึ่งพุ่งตรงไปในทิศทางของการหมุนของกระดอง ในโหมดมอเตอร์ แคลมป์ของเครื่องจะมาพร้อมกับ ความดันคงที่และกระแสไหลผ่านขดลวดกระดอง ตัวนำของขดลวดกระดองอยู่ในสนามแม่เหล็กของเครื่องที่สร้างขึ้นโดยกระแสกระตุ้นและดังนั้นจึงเป็นไปตามกฎหมาย
แอมแปร์ กองกำลังจะทำหน้าที่ การรวมกันของกองกำลังเหล่านี้สร้างแรงบิดภายใต้อิทธิพลที่เกราะจะหมุน เมื่อกระดองหมุน EMF จะถูกเหนี่ยวนำให้เกิดในขดลวดของมัน ซึ่งมุ่งตรงไปยังกระแส ดังนั้นสำหรับมอเตอร์จึงเรียกว่า back-EMF
3. Armature emf และสมการแรงบิด
พิจารณาตัวนำไฟฟ้าตัวหนึ่งในช่องกระดอง ปล่อยให้มันเคลื่อนที่ (ระหว่างการหมุนของเกราะ) ด้วยความเร็วเชิงเส้น V จากนั้น EMF จะถูกเหนี่ยวนำในตัวนำนี้:
E \u003d V cf l ฉัน V บาป  ,
,
ที่ไหน \u003d 90, lа - ความยาวของส่วนที่ใช้งานของกระดอง, V cf - การเหนี่ยวนำสนามแม่เหล็กเฉลี่ยในช่องว่าง
ให้ 2a เป็นจำนวนกิ่งขนานกัน เนื่องจาก EMF เท่ากับ EMF ของหนึ่งสาขา เราจึงเขียนได้ดังนี้

โดยที่ E คือ EMF ที่ต้องการของกระดอง N คือจำนวนของตัวนำกระดองทั้งหมด
โดยที่ Ф คือฟลักซ์แม่เหล็กของขั้วหนึ่ง และ S คือพื้นที่ที่ฟลักซ์นี้ทะลุทะลวง ดังนั้น

โดยที่ p คือจำนวนคู่ของเสา (p = 1,2, ...)
ความเร็ว V สามารถแสดงได้ในแง่ของความเร็วของเกราะ n:
แทนที่นิพจน์ผลลัพธ์ลงในสูตรสำหรับ E i:

ในที่สุดเราก็ได้:
E ผม \u003d C E F n.
จะเห็นได้ว่า EMF ของกระดองเป็นสัดส่วนกับความถี่ของการหมุนของกระดองและฟลักซ์แม่เหล็กของขั้ว โดยใช้กฎของแอมแปร์ เราพบแรงที่สนามกระตุ้นกระทำต่อตัวนำกระดองตัวเดียว:
F = V cf l ฉัน ฉันบาป
,
ที่นี่ = 90 , ผม - กระแสในตัวนำ
แรงนี้สร้างแรงบิด:
โดยที่ D คือเส้นผ่านศูนย์กลางของกระดอง คูณด้วยจำนวนตัวนำทั้งหมด N เราจะได้โมเมนต์ทั้งหมด:
การเหนี่ยวนำโดยเฉลี่ย ใน cf ก่อนหน้านี้ เราได้รับโดยการหารฟลักซ์แม่เหล็กของหนึ่งขั้วด้วยพื้นที่ที่ฟลักซ์แทรกซึมนี้:
เนื่องจากกระแสกระดองกระจายไปตามกิ่งขนาน กระแสในตัวนำเดียวจึงถูกกำหนดโดยนิพจน์:

แทนที่นิพจน์สำหรับ B cf และ I ลงในสูตรสำหรับช่วงเวลาทั่วไป เราได้รับ:

ถ้าเราแนะนำสัมประสิทธิ์เชิงสร้างสรรค์
ในที่สุดเราก็สามารถเขียนได้ว่า:
อย่างที่คุณเห็น โมเมนต์แม่เหล็กไฟฟ้าของเครื่อง DC เป็นสัดส่วนกับฟลักซ์แม่เหล็กของขั้วและกระแสของกระดอง

สูตร EMF ของกระดอง Ea ที่ได้รับข้างต้นให้ค่าเฉลี่ยของ EMF ในความเป็นจริง ค่าของมันผันผวน (พัลส์) ระหว่างค่าจำกัดสองค่า - E min และ E max เมื่อกระดองหมุน ส่วนหนึ่งของการหมุนที่ถูกลัดวงจรโดยแปรง จะถูกปิดจากกิ่งที่ขนานกัน และในช่วงเวลาที่เกราะถูกหมุนผ่านมุมที่สอดคล้องกับแผ่นสะสมหนึ่งแผ่น ผลรวมของค่า EMF ที่เกิดขึ้นทันที มีเวลาเปลี่ยนแปลงบ้าง ค่าสูงสุดของ EMF pulsations ที่เกิด E = 0.5 (E สูงสุด -E นาที) ขึ้นอยู่กับจำนวนของเพลตตัวรวบรวม ตัวอย่างเช่น เมื่อตัวเลขนี้เพิ่มขึ้นจาก 8 เป็น 40 ค่าของ E จะลดลงจาก 4V เป็น 0.16V
4. ปฏิกิริยากระดองในเครื่อง DC
เมื่อเครื่อง DC ไม่ทำงาน สนามแม่เหล็กจะถูกสร้างขึ้นโดยขดลวดของขั้วเท่านั้น การปรากฏตัวของกระแสในตัวนำกระดองภายใต้ภาระนั้นมาพร้อมกับลักษณะของสนามแม่เหล็กของกระดอง เนื่องจากทิศทางของกระแสน้ำในตัวนำระหว่างแปรงไม่เปลี่ยนแปลง สนามของกระดองที่หมุนอยู่จะคงที่สัมพันธ์กับแปรงและเสากระตุ้น
ขดลวดกระดองจะคล้ายกับโซลินอยด์ที่มีแกนตรงกับแนวของแปรง ดังนั้น เมื่อแปรงถูกติดตั้งบนเรขาคณิตที่เป็นกลาง การไหลของกระดองจะเป็นแนวขวางกับกระแสกระตุ้น และผลกระทบของมันต่อหลังเรียกว่าปฏิกิริยากระดองตามขวาง . เมื่อสร้างเวกเตอร์ของการไหลของผลลัพธ์ เราจะเห็นว่าตอนนี้หมุนรอบแกนเรขาคณิตของเสาหลัก สนามของเครื่องจะกลายเป็นอสมมาตร นิวตรอนทางกายภาพจะหมุนสัมพันธ์กับเรขาคณิต ในเครื่องกำเนิดไฟฟ้าพวกเขาจะเคลื่อนที่ไปในทิศทางของการหมุนของกระดองในเครื่องยนต์ - กับทิศทางการหมุนของกระดอง
ภายใต้ความเป็นกลางทางกายภาพ เราจะเข้าใจเส้นที่ลากผ่านจุดศูนย์กลางของเกราะและตัวนำของขดลวดเกราะ ซึ่ง EMF ที่เหนี่ยวนำโดยฟลักซ์แม่เหล็กที่ได้จะเป็นศูนย์ ปฏิกิริยาด้านข้างของกระดองมีผลเพียงเล็กน้อยต่อประสิทธิภาพของเครื่อง ผลกระทบนี้มักจะไม่นำมาพิจารณา อย่างไรก็ตาม เมื่อแปรงเคลื่อนออกจากความเป็นกลางทางเรขาคณิต ส่วนประกอบตามยาวจะปรากฏในฟลักซ์ของกระดอง ผลกระทบของมันต่อฟลักซ์ของขั้วจะเรียกว่าปฏิกิริยาอาร์เมเจอร์ตามยาว มันสามารถเป็นได้ทั้งแม่เหล็กและล้างอำนาจแม่เหล็กในธรรมชาติ โดยทั่วไป ปฏิกิริยาของกระดองทำให้เกิดการบิดเบี้ยวของสนามใต้เสาและการเปลี่ยนแปลงของฟลักซ์ของเสา อดีตสามารถทำให้เกิดประกายไฟเพิ่มขึ้นอย่างมากภายใต้แปรง (ขึ้นอยู่กับลักษณะของไฟทุกรอบบนตัวสะสม) และตัวหลังในเครื่องกำเนิดไฟฟ้าจะเปลี่ยนแรงดันไฟฟ้าที่ขั้วและในเครื่องยนต์ความเร็วของแรงบิดและเกราะ .
เพื่อทำให้ปฏิกิริยากระดองอ่อนลง ช่องว่างอากาศระหว่างสเตเตอร์และอาร์มาเจอร์จะเพิ่มขึ้น การหมุนแบบพิเศษในร่องของชิ้นขั้ว ในเครื่องจักรที่มีกำลังสูงจะใช้ขดลวดชดเชยพิเศษเพื่อการนี้ มันพอดีกับร่องของชิ้นขั้ว และเชื่อมต่อแบบอนุกรมกับวงจรกระดอง การไหลของมันสมดุลการไหลตามยาวของกระดอง





