Jednoduchý algoritmus diskrétního PID regulátoru
Podporováno všemi mikrokontroléry AVR
Funkce PID využívá 534 bajtů flash paměti a 877 cyklů procesoru (IAR - optimalizace nízké velikosti)
1. Úvod
Tento manuál popisuje jednoduchou implementaci diskrétního proporcionálně-integrálně-derivačního (PID) regulátoru.
Při práci s aplikacemi, kde se výstupní signál systému musí měnit v souladu s referenční hodnotou, je vyžadován řídicí algoritmus. Příklady takových aplikací jsou řídicí jednotka motoru, řídicí jednotka pro teplotu, tlak, průtok kapaliny, rychlost, sílu nebo jiné proměnné. PID regulátor lze použít k řízení libovolné měřené veličiny.
V oblasti regulace se již dlouhou dobu používá mnoho řešení, ale PID regulátory se díky své jednoduchosti a dobrému výkonu mohou stát „průmyslovým standardem“.
Pro získání dodatečné informace pro PID regulátory a jejich aplikace by se měl čtenář obrátit na jiné zdroje, jako jsou PID regulátory od K. J. Astrom & T. Hagglund (1995)
Obrázek 1-1. Typické reakce PID regulátoru na skokovou změnu referenčního signálu
2. PID regulátor
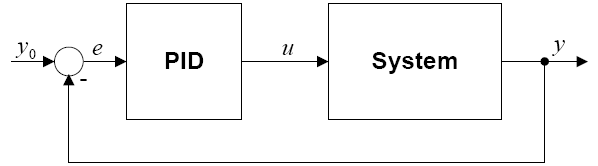
Obrázek 2-1 ukazuje schéma systému s PID regulátorem. PID regulátor porovnává naměřenou procesní hodnotu Y s danou referenční hodnotou Y0. Rozdíl nebo chyba E je poté zpracována pro výpočet nového vstupního procesu U. Tento nový vstupní proces se pokusí přiblížit hodnotu měřeného procesu specifikované hodnotě.
Alternativou k řídicímu systému s uzavřenou smyčkou je řídicí systém s otevřenou smyčkou. Otevřená regulační smyčka (bez zpětné vazby) není v mnoha případech uspokojivá a její aplikace je vzhledem k vlastnostem systému často nemožná.
Obrázek 2-1. PID regulační systém s uzavřenou smyčkou
Na rozdíl od jednoduchých regulačních algoritmů je PID regulátor schopen řídit proces na základě jeho historie a rychlosti změn. To poskytuje přesnější a stabilnější způsob ovládání.
Hlavní myšlenkou je, že regulátor přijímá informace o stavu systému pomocí senzoru. Poté odečte naměřenou hodnotu od referenční hodnoty a vypočítá chybu. Chyba bude řešena třemi způsoby: zpracovat současný čas pomocí proporcionálního členu, vrátit se do minulosti pomocí integrálního členu a předvídat budoucnost pomocí diferenciálního členu.
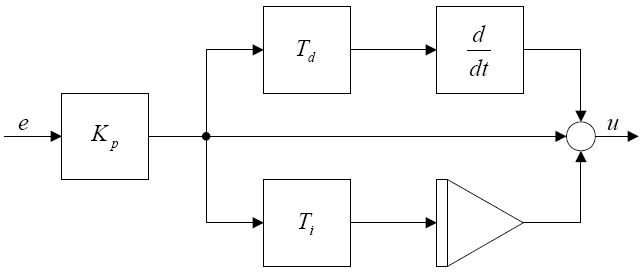
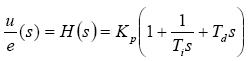
Obrázek 2-2 ukazuje schéma zapojení PID regulátoru, kde Tp, Ti a Td jsou proporcionální, integrální a derivační časové konstanty.
Obrázek 2-2. Schéma PID regulátoru
2.1 Proporcionální
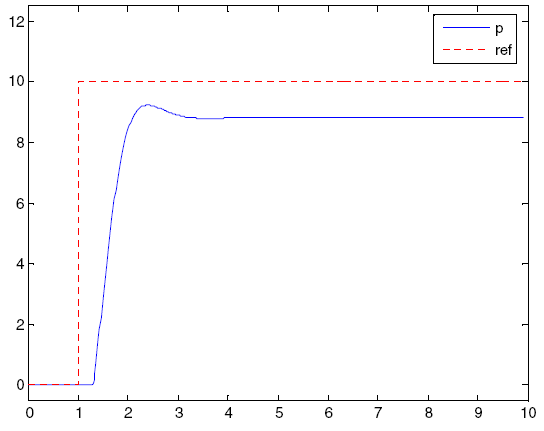
Proporcionální člen (P) dává řídicí signál úměrný vypočtené chybě. Použití pouze jednoho proporcionálního řízení vždy způsobí stacionární chybu, kromě případů, kdy je řídicí signál nulový a hodnota procesu systému je rovna požadované hodnotě. Na Obr. 2-3 se po změně referenčního signálu (ref) objeví stacionární chyba hodnoty procesního systému. Použití příliš velkého P-členu způsobí nestabilní systém.Obrázek 2-3. Odezva P regulátoru na skokovou změnu referenčního signálu
2.2 Integrální člen
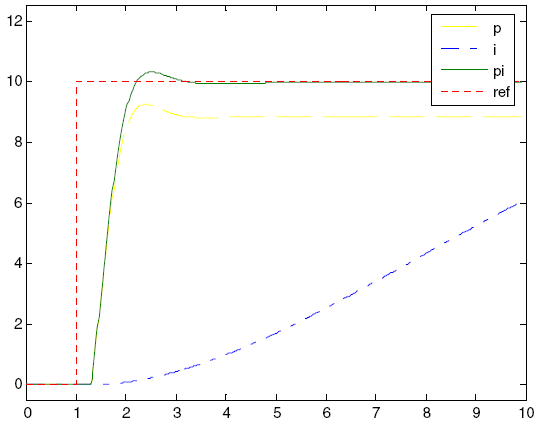
Integrální složka (I) představuje předchozí chyby. Sčítání chyby bude pokračovat, dokud se hodnota systémového procesu nestane rovna požadované hodnotě. Obvykle se integrální složka používá spolu s proporcionální složkou, v tzv. PI regulátorech. Použití pouze integrální součásti poskytuje pomalou odezvu a často oscilační systém. Obrázek 2-4 ukazuje skokovou odezvu I a PI regulátoru. Jak vidíte, odezva PI regulátoru nemá žádnou stacionární chybu a odezva I regulátoru je velmi pomalá.
Obrázek 2-4. Odezva I- a PI regulátoru na skokovou změnu regulované hodnoty
2.3 Odvozený termín
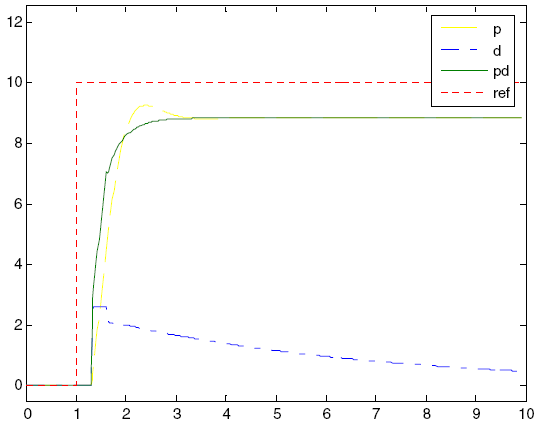
Rozdílový člen (D) je rychlost změny chyby. Přidání této složky zlepšuje odezvu systému na náhlou změnu jeho stavu. Diferenciální termín D se obvykle používá s P nebo PI algoritmy, jako jsou PD nebo PID regulátory. Velká diferenciální složka D obvykle dává nestabilní systém. Obrázek 2-5 ukazuje odezvy regulátoru D a PD. Odezva PD regulátoru poskytuje rychlejší nárůst procesní hodnoty než P regulátor. Všimněte si, že diferenciální člen D se chová v podstatě jako horní propust pro chybový signál, a tak snadno činí systém nestabilním a náchylnějším k šumu.
Obrázek 2-5. Odezva D- a PD-regulátoru na skokovou změnu referenčního signálu
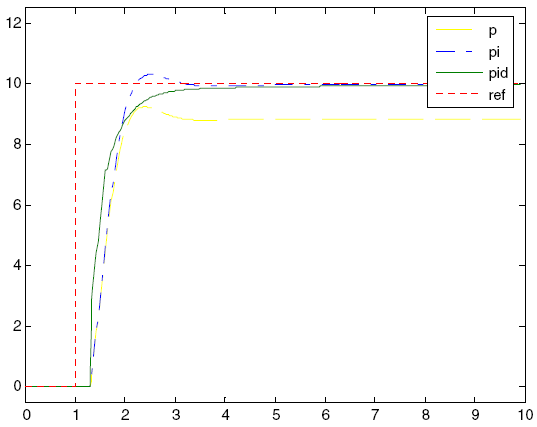
PID regulátor poskytuje nejlepší výkon, protože využívá všechny komponenty společně. Obrázek 2-6 porovnává regulátory P, PI a PID. PI zlepšuje P odstraněním stacionární chyby a PID zlepšuje PI rychlejší odezvou.
Obrázek 2-6. Odezva regulátoru P-, PI- a PID na skokovou změnu referenčního signálu
2.4. Nastavení
Nejlepším způsobem, jak zjistit požadované parametry PID algoritmu, je použít matematický model systému. Často však chybí podrobný matematický popis systému a nastavení parametrů PID regulátoru lze provést pouze experimentálně. Nalezení parametrů pro PID regulátor může být skličující úkol. Tady velká důležitost mít údaje o vlastnostech systému a různé podmínky její práce. Některé procesy by neměly umožnit, aby procesní proměnná překročila nastavenou hodnotu. Ostatní procesy by měly minimalizovat spotřebu energie. Nejdůležitějším požadavkem je také stabilita. Proces by neměl za žádných okolností kolísat. Navíc musí do určité doby dojít ke stabilizaci.
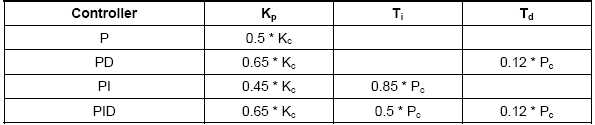
Existuje několik metod pro vyladění PID regulátoru. Výběr metody bude do značné míry záviset na tom, zda proces může být offline pro ladění nebo ne. Metoda Ziegler-Nichols je známá metoda neoffline ladění. Prvním krokem v této metodě je nastavení zesílení I a D na nulu, čímž se zesílení P zvýší na stálou a stabilní oscilaci (co nejblíže). Poté se zaznamená kritické zesílení Kc a perioda oscilace Pc a hodnoty P, I a D se upraví pomocí tabulky 2-1.
Tabulka 2-1. Výpočet parametrů podle metody Ziegler-Nichols
Pro optimalizaci výkonu PID regulátoru je často nutné další ladění parametrů. Čtenář by si měl uvědomit, že existují systémy, kde PID regulátor nebude fungovat. Mohou to být nelineární systémy, ale obecně často vznikají problémy s PID regulací, když jsou systémy nestabilní a účinek vstupního signálu závisí na stavu systému.
2.5. Diskrétní PID regulátor
Diskrétní PID regulátor načte chybu, vypočítá a vydá řídicí signál pro dobu vzorkování T. Doba vzorkování musí být kratší než nejmenší časová konstanta v systému.
2.5.1. Popis algoritmu
Na rozdíl od jednoduchých regulačních algoritmů je PID regulátor schopen manipulovat s řídicím signálem na základě historie a rychlosti změny měřeného signálu. To poskytuje přesnější a stabilnější způsob ovládání.
Obrázek 2-2 ukazuje návrh obvodu PID regulátoru, kde Tp, Ti a Td jsou proporcionální, integrální a derivační časové konstanty.
Přenosová funkce systému znázorněného na obrázku 2-2 je:
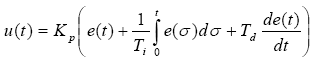
Aproximujeme integrální a diferenciální složky, abychom získali diskrétní formu
Aby tato změna v referenční procesní hodnotě nezpůsobila žádné nechtěné rychlé změny na řídicím vstupu, regulátor zlepšuje pouze na základě odvozeného členu na procesních hodnotách:
3. Implementace PID regulátoru v C
K tomuto dokumentu je připojena funkční aplikace C. Úplný popis zdrojového kódu a informace o kompilaci lze nalézt v souboru „readme.html“.
Obrázek 3-1. Vývojový diagram ukázkové aplikace
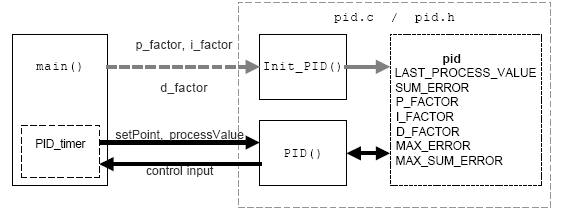
Obrázek 3-1 ukazuje zjednodušené schéma ukázkové aplikace.
PID regulátor používá strukturu k uložení svého stavu a parametrů. Tato struktura je inicializována funkcí main a funkcím Init_PID() a PID() je předán pouze ukazatel na ni.
Funkce PID() musí být volána pro každý časový interval T, toto je nastaveno časovačem, který nastaví příznak PID_timer, když uplyne čas vzorkování. Když je nastaven příznak PID_timer, hlavní program načte referenční hodnotu procesu a systémovou hodnotu procesu, zavolá funkci PID() a odešle výsledek na řídicí vstup.
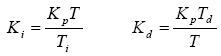
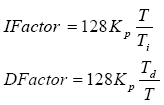
Pro zvýšení přesnosti jsou p_factor, i_factor a d_factor zvýšeny 128krát. Výsledek algoritmu PID je později redukován dělením 128. Hodnota 128 se používá k optimalizaci kompilace.
![]()
Kromě toho bude vliv Ifactor a Dfactor záviset na čase T.
3.1. Integrální natahování
Když vstupní proces U dosáhne dostatečně vysoké hodnoty, stane se ohraničeným. Buď vnitřním číselným rozsahem PID regulátoru, nebo výstupním rozsahem regulátoru, nebo potlačeným v zesilovačích. K tomu dojde, pokud je mezi naměřenou hodnotou a referenční hodnotou dostatečně velký rozdíl, obvykle proto, že proces má více poruch, než je systém schopen zvládnout.
Pokud regulátor používá integrální termín, může být tato situace problematická. V takové situaci se bude integrální člen neustále sčítat, ale pokud nedojde k velkým porušením, PID regulátor začne kompenzovat proces, dokud se integrální součet nevrátí k normálu.
Tento problém lze vyřešit několika způsoby. V tomto příkladu je maximální integrální součet omezený a nemůže být větší než MAX_I_TERM. Správná velikost MAX_I_TERM bude záviset na systému.
4. Další vývoj
Zde prezentovaný PID regulátor je zjednodušeným příkladem. Ovladač by měl fungovat dobře, ale některé aplikace mohou vyžadovat, aby byl ovladač ještě spolehlivější. Může být nutné přidat korekci saturace v integrálním členu na základě proporcionálního členu pouze k procesní hodnotě.
Při výpočtu Ifactor a Dfactor je čas vzorkování T součástí rovnice. Pokud je použitý čas vzorkování T mnohem menší nebo větší než 1 sekunda, přesnost Ifactor nebo Dfactor bude nedostatečná. Je možné přepsat PID a škálovací algoritmus tak, aby byla zachována přesnost integrálních a diferenciálních členů.
5. Referenční literatura
K. J. Astrom & T. Hagglund, 1995: PID regulátory: teorie, design a ladění.
International Society for Measurement and Con.
6. Soubory
AVR221.rarNa požádání přeložil Kirill Vladimirov
Přednáška 30Implementace PID regulátoru a digitální filtrace v regulátorech
Mikroprocesorové regulátory umožňují implementovat jak diskrétní a analogové regulátory, tak i nelineární regulátory a regulátory s automatickým laděním. Hlavním problémem digitálního řízení je najít vhodnou strukturu regulátoru a jeho parametry. Softwarová implementace řídicích algoritmů pro tyto parametry je obvykle relativně jednoduchý úkol.
Součástí každého regulátoru musí být i ochranné prostředky, které zabraňují nebezpečnému rozvoji procesu působením regulátoru v mimořádných situacích.
Mnoho TP se vyznačuje několika vstupními a výstupními parametry. Vnitřní spojení a interakce příslušných signálů často nejsou kritické a proces lze řídit sadou jednoduchých regulátorů, přičemž každá smyčka se používá v přímých digitálních řídicích systémech.
Lineární regulátory s jedním vstupem/výstupem lze znázornit v zobecněné podobě
Kde u je výstup regulátoru (řídící veličina), u S je nastavená hodnota a na– procesní výstupní signál (regulovaná veličina). Parametr P představuje příkaz regulátora.
Obyčejný PID regulátor lze považovat za speciální případ zobecněného diskrétního regulátoru s P= 2.
Uvažujme regulátor sestávající ze dvou částí: zpětnovazební smyčka (zpětná vazba) G Facebook (s), který řeší chybu E , a dopředná smyčka G FF (s), který řídí změny v akci nastavení a přidává do řídicího signálu korekční člen, aby systém rychleji reagoval na změny v nastavení. U tohoto ovladače je to ovládací akce U (s ) je součet dvou signálů
Tento výraz lze přepsat jako
Kde U F 1 (s) je preventivní signál založený na referenční hodnotě (nastavení), a U F 2 (s) je signál zpětné vazby.
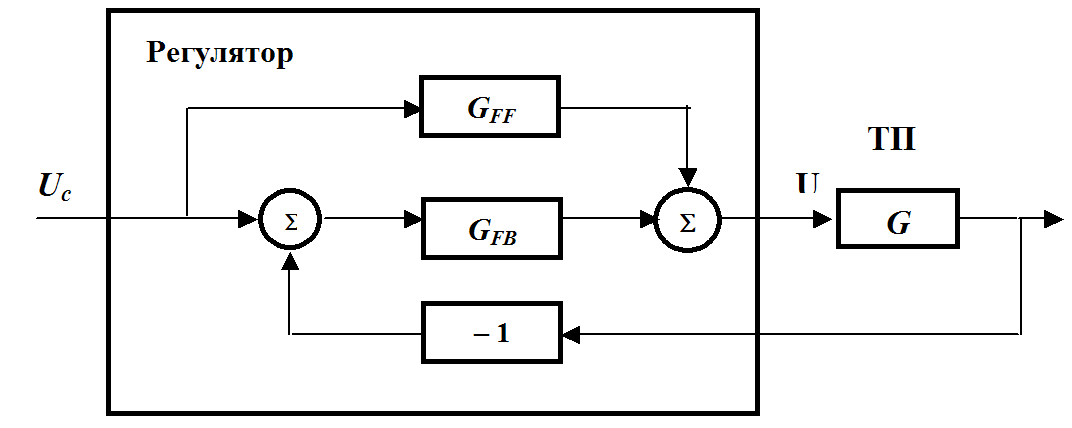
Obr.30.1.Regulátor obsahující dopřednou regulační smyčku založenou na referenční hodnotě (nastavené hodnotě) a zpětnovazební smyčku založenou na výstupu procesu A
Regulátor má dva vstupní signály U C (s) A Y(s) a lze jej tedy popsat dvěma přenosovými funkcemi G F 1 (s) A G R (s).
|
|
Jelikož regulátor s PF (30.3) má kvůli G F 1 (s) více nastavitelných koeficientů než klasický regulátor, pak má uzavřený regulační systém lepší vlastnosti.
Polohu pólů zpětnovazebního systému lze měnit pomocí regulátoru G R (s) a dopředný ovladač G F 1 (s) přidá do systému nové nuly. Proto může řídicí systém rychle reagovat na změny signálu úlohy, pokud G F 1 (s) je vybráno správně.
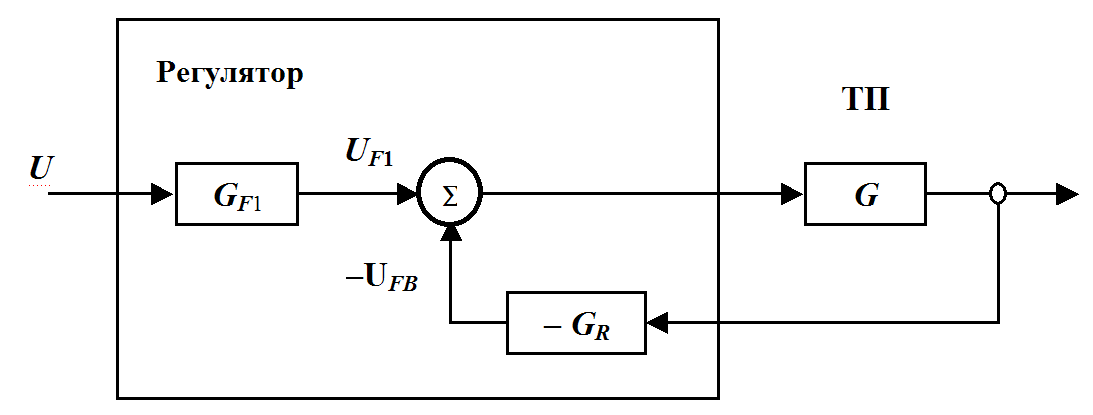
Obr.30.2. Struktura lineárního regulátoru s dopředným řízením a zpětnou vazbou
Díky použití takového regulátoru je možné vytvářet vysoce přesné (servo) řídicí systémy pomocí elektrických pohonů, robotů nebo obráběcích strojů. Pro ně je důležité, aby odezva na výstup procesu byla rychlá a přesná na jakoukoli změnu reference.
Pokud je čitatel a jmenovatel PF G R (s), A G F 1 (s) v (23.3) vyjádřit polynomy v s , pak lze popis regulátoru po transformacích znázornit v následující podobě
G 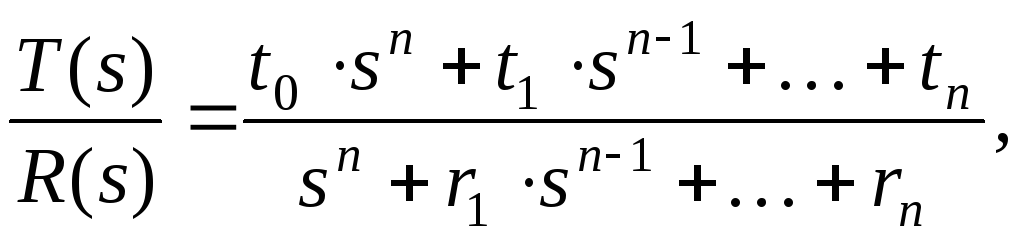
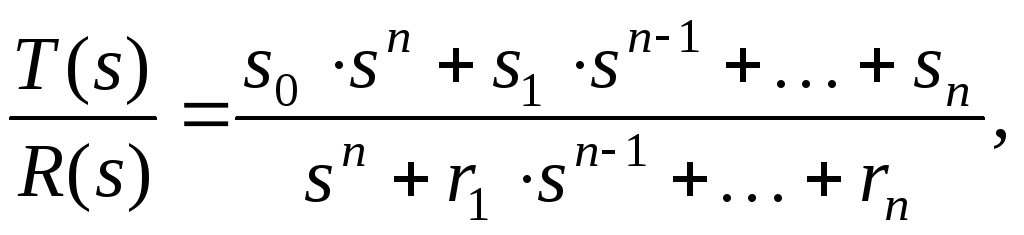 de
de
r i ,s i ,t i – parametry PF polynomů, s– Laplaceův operátor.
Regulátor odpovídající rovnici (30.4) může být reprezentován jako zobecněný regulátor (generalcontroller)
PF procesu lze vyjádřit jako
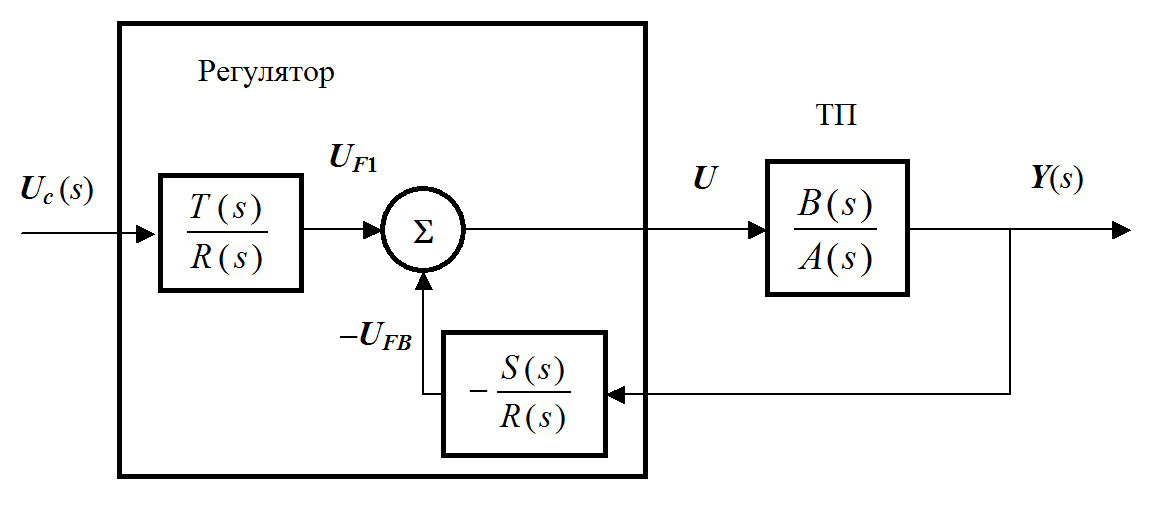
Obr.30.3. Struktura lineárního regulátoru s dopřednou regulací a zpětnou vazbou ve formě PF
Li R(s),S(s) A T(s) mají dostatečně vysoký řád, tj. dostatečný počet "ladicích knoflíků", lze PF uzavřeného systému měnit v širokém rozsahu. Objednávka regulátoru P musí být stejný jako původní proces. Ano, vybírání R(s) A S(s), lze libovolně měnit jmenovatele PF uzavřeného systému. Teoreticky to znamená, že póly uzavřeného systému lze posunout na libovolné místo v komplexní rovině. (V praxi maximální amplituda a rychlost změny řídicího signálu omezuje volnost pohybu pólů.)
V důsledku toho může být nestabilní systém s tyčí s kladnou reálnou částí stabilizován pomocí SU.
30.1. Implementace PID regulátoru
Nejprve by měl být vyvinut model diskrétního regulátoru a stanovena vhodná vzorkovací frekvence. Amplituda výstupní hodnoty regulátoru musí být mezi minimální a maximální povolenou hodnotou. Často je nutné omezit nejen výstupní signál, ale i rychlost změny vzhledem k fyzickým možnostem MI a zabránit jejich nadměrnému opotřebení.
Změna nastavení parametrů a přechod z automatického na ruční provoz nebo jiné změny provozních podmínek nesmí vést k poruchám v řízeném procesu.
Regulátory mohou být vytvořeny v analogové technologii založené na operačních zesilovačích nebo jako digitální zařízení na bázi mikroprocesorů. Mají však téměř stejný vzhled – malé odolné pouzdro, které umožňuje instalaci v průmyslovém prostředí.
Zatímco digitální technologie má mnoho výhod, analogový přístup je základem digitálních řešení. Mezi výhody digitálních regulátorů patří možnost jejich vzájemného propojení pomocí komunikačních kanálů, což umožňuje výměnu dat a dálkové ovládání. Máme zájem o programy pro digitální PID regulátor
Model diskrétního PID regulátoru . Je nezbytný pro softwarovou implementaci analogového regulátoru. Pokud je regulátor navržen na základě analogového popisu a následně je sestaven jeho diskrétní model, v dostatečně malých vzorkovacích intervalech jsou časové derivace nahrazeny konečnými rozdíly a integrace je nahrazena sumací. Pro každý vzorek se vypočítá chyba výstupu procesu
E(k)=u C (k) – y(k) .
V tomto případě je interval vzorkování t s je považován za konstantní a žádné změny signálu, ke kterým mohlo dojít během vzorkovacího intervalu, se neberou v úvahu.
Existují dva typy algoritmu PID regulátoru – poziční a inkrementální
Algoritmus polohového PID regulátoru. V pozičním algoritmu ( pozice formulář) výstupní signál je absolutní hodnota řídící veličiny MI. Diskrétní PID regulátor má tvar
u(k)=u 0 +u P (k)+u já (k)+u D (k).
V tomto případě je vzorkovací interval ts považován za konstantní a jakékoli změny signálu, které by mohly během vzorkovacího intervalu nastat, se neberou v úvahu.
I při nulové chybě řízení je výstupní signál nenulový a je určen offsetem u 0 .
Poměrná část regulátoru má tvar
u P (k)= K∙ E(k).
Integrální část je aproximována konečnými rozdíly
u já (k) = u já (k – 1) + K∙ (t s / T i) ∙ E(k)= u já (k – 1) + K∙ A∙ E(k).
Hodnota druhého termínu je malá t s a velký T i může být velmi malý, takže musíte zajistit požadovanou přesnost jeho strojového znázornění.
Rozdílová část PID regulátoru je aproximována zpětnou diferencí
u D (k) =b∙ u D (k – 1) – K∙ (T d / t s) ∙ (1– b)∙ [y(k)– y(k – 1)],
|
|
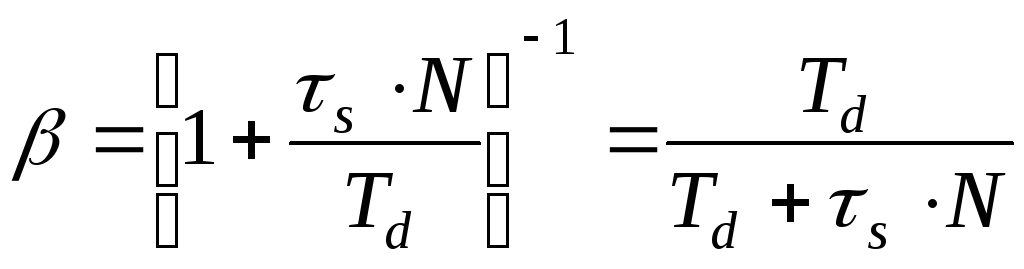
Hodnota T d / N = T F je normalizovaná N krát) časová konstanta filtru v aproximaci diferenciální složky regulačního zákona aperiodickou vazbou prvního řádu. Číslo N v rozsahu od 5 do 10. Hodnota b je v rozsahu od 0 do 1.
přírůstkový algoritmus. Vypočítává pouze změnu svého výstupního signálu. Algoritmus přírůstku ( přírůstkové formulář) PID regulátor je vhodné použít, pokud je IM druh integrátoru, jako je krokový motor. Dalším příkladem takového MI je ventil, jehož otevírání a zavírání je řízeno impulsy a který udržuje svou polohu v nepřítomnosti vstupních signálů.
V inkrementálním algoritmu se mění pouze řídicí výstupní signál od okamžiku ( k – 1) až do okamžiku k. Algoritmus regulátoru je zapsán jako
Δ u já (k) = u (k) – u (k – 1) =Δ u P (k) + Δ u já (k) + Δ u D (k).
Z rovnice se vypočítá proporcionální část inkrementačního algoritmu
Δ u P (k) = u P (k) – u P (k – 1) =K∙ [E(k)– E(k – 1)] = K∙ Δ E(k).
Nedílná část - z rovnice
Δ u já (k) = u já (k) – u já (k – 1) =K∙ A∙ E(k).
Diferenciální část je z rovnice
Δ u D (k) =b Δ u D (k – 1) – K∙ (T d / t s)∙(1– b)∙ [Δ y(k)– Δ y(k – 1),
Δ y(k) =y(k)– y(k – 1).
Algoritmus je velmi jednoduchý. Pro jeho aplikaci zpravidla postačují operace s plovoucí desetinnou čárkou běžné přesnosti. Nemá problémy kvůli saturaci. Při přepnutí z ručního režimu na automatický regulátor, který vypočítává přírůstky, nevyžaduje přiřazení počáteční hodnoty řídicímu signálu ( u 0 v pozičním algoritmu).
IM lze při spouštění uvést do požadované polohy ručním i automatickým ovládáním. Malou nevýhodou inkrementačního algoritmu je nutnost brát v úvahu integrální složku.
Referenční hodnota se snižuje v proporcionální i diferenciální části počínaje druhým vzorkem poté, co byla změněna. Pokud je tedy použit regulátor založený na inkrementálním algoritmu bez integrální součásti, může se řízený proces odchylovat od referenční hodnoty.
Stanovení vzorkovací frekvence v SN . Je to spíše umění než věda. Příliš nízká vzorkovací frekvence snižuje účinnost regulace, zejména schopnost řídicího systému kompenzovat poruchy. Pokud však interval vzorkování překročí dobu odezvy procesu, může porucha ovlivnit proces a zmizí dříve, než regulátor přijme nápravné opatření. Proto je při určování vzorkovací frekvence důležité vzít v úvahu jak dynamiku procesu, tak charakteristiky poruchy.
Na druhou stranu příliš vysoká vzorkovací frekvence vede ke zvýšené zátěži počítače a opotřebení IM.
Stanovení vzorkovací frekvence je tedy kompromisem mezi požadavky dynamiky procesu a dostupným výkonem počítačů a technologických mechanismů. Standardní digitální regulátory pracující s malým počtem regulačních smyček (8 až 16) používají pevnou vzorkovací frekvenci v řádu zlomků sekundy.
Poměr signálu k šumu také ovlivňuje vzorkovací frekvenci. Při nízkých hodnotách tohoto poměru, tj. při vysokém šumu, je třeba se vyhnout vysoké vzorkovací frekvenci, protože odchylky v měřicím signálu budou pravděpodobněji spojeny s vysokofrekvenčním šumem, a nikoli se skutečnými změnami ve fyzikálním procesu.
Přiměřená vzorkovací frekvence se považuje za vztahující se k šířce pásma nebo době ustálení řídicího systému s uzavřenou smyčkou. Základní pravidla doporučují, aby vzorkovací frekvence byla 6-10krát vyšší než šířka pásma, nebo aby doba ustálení byla alespoň pět vzorkovacích intervalů.
V případě, že je přípustné dodatečné fázové zpoždění 5-15°, platí následující pravidlo
t s · ω S = 0,15 – 0,5 ,
kde ω S – šířka pásma systému (na úrovni 3 dB), t s – kvantizační perioda neboli vzorkovací interval. (Tento přístup se používá v mnoha průmyslových digitálních jednosmyčkových a vícesmyčkových PID regulátorech.)
Omezení řídicího signálu . Existují dva předpoklady pro omezení řídicího signálu:
1) amplituda výstupního signálu nemůže překročit rozsah DAC na výstupu počítače;
2) provozní rozsah MI je také vždy omezen. Ventil se neotevře více než na 100 %; motor nemůže být napájen neomezeným proudem a napětím.
Proto musí řídicí algoritmus obsahovat nějakou funkci, která omezuje výstupní signál. V některých případech musí být definováno pásmo necitlivosti nebo pásmo necitlivosti.
Pokud je použit regulátor s inkrementálním algoritmem, mohou být změny v řídicím signálu tak malé, že je MI nemůže zpracovat. Pokud je řídicí signál dostatečný pro ovlivnění MI, je vhodné se vyhnout malým, ale častým operacím, které mohou urychlit jeho opotřebení.
Jednoduchým řešením je sečíst malé změny v regulační veličině a vydat řídicí signál MI až po překročení nějaké prahové hodnoty. Zavedení mrtvé zóny má smysl pouze v případě, že přesahuje rozlišení DAC na výstupu z počítače
Prevence integrální saturace. Integrální navíjení nastává, když PI nebo PID regulátor musí kompenzovat chybu, která je dlouhodobě mimo rozsah regulované veličiny. Vzhledem k tomu, že výstup regulátoru je omezený, je obtížné chybu vynulovat.
Pokud chyba regulace zůstane znaménko po dlouhou dobu, hodnota integrální složky PID regulátoru se velmi zvětší. K tomu dochází, pokud je řídicí signál natolik omezen, že se vypočítaný výkon regulátoru liší od skutečného výkonu MI.
Vzhledem k tomu, že integrální část se stane nulou až po nějaké době po změně znaménka chybové hodnoty, integrální saturace může vést k velkým překmitům. Integrální saturace je výsledkem nelinearit v systému spojených s ořezáváním výstupního řídicího signálu a v lineárním systému nemůže být nikdy pozorována.
Vliv integrální části lze omezit podmíněnou integrací. Dokud je chyba dostatečně velká, není k vytvoření řídicího signálu zapotřebí její integrální část, ale pro regulaci stačí proporcionální část.
Integrální část sloužící k odstranění stacionárních chyb je potřeba pouze v případech, kdy je chyba relativně malá. Při podmíněné integraci je tato složka zohledněna ve výsledném signálu pouze v případě, že chyba nepřekročí určitou prahovou hodnotu. Pro velké chyby funguje PI regulátor jako P regulátor. Volba prahové hodnoty pro aktivaci integrálního členu není snadný úkol. U analogových regulátorů se podmíněná integrace provádí pomocí Zenerovy diody (limiteru), která je zapojena paralelně s kondenzátorem ve zpětnovazebním obvodu operačního zesilovače v integračním bloku regulátoru. Takové schéma omezuje příspěvek integrovaného signálu.
U digitálních PID regulátorů je integrální saturaci jednodušší se vyhnout. Integrální část je v každém vzorkovacím intervalu upravena tak, aby výstup regulátoru nepřekročil určitou mez.
Řídicí signál je nejprve vypočítán pomocí algoritmu PI regulátoru a poté zkontrolován, zda nepřekračuje nastavené limity:
u = u min , Li u d < u min ;
u = u d , Li u min ≤ u d < u max ;
u = u max , Li u d ≤ u max ;
Po omezení výstupního signálu se integrální část regulátoru resetuje. Níže je uveden příklad programu pro PI regulátor s ochranou proti saturaci.
Dokud řídicí signál zůstává v nastavených mezích, neovlivňuje poslední příkaz v textu programu integrální část regulátoru.
(*inicializace*) c1:=K*taus/Ti;
(*regulátor*)
Ipart:= Ipart + c1*e;
ud:=K*e+Ipart; (*vypočítat řídicí signál*)
pokud(ud jinak pokud (ud<
umax) then u:= ud Ipart:=u-K*e; (* korekce integrální části "anti-saturation" *) Znázornění problému integrální saturace pro polohovací pohon s PI regulátorem je dále na Obr. 30.4. Plynulé přepínání provozních režimů.
Při přepnutí z ručního do automatického režimu může výstup regulátoru vyskočit, i když je chyba regulace nulová. Důvodem je, že integrální člen v algoritmu regulátoru není vždy roven nule. Regulátor je dynamický systém a jeho integrální součástí je jeden z prvků vnitřního stavu, který je nutné znát při změně režimu regulace. Skoku výstupní hodnoty regulátoru lze zabránit a změna režimu se v tomto případě nazývá beznárazový přechod (bumpless transfer). Jsou možné dvě situace: a) přechod z manuálního do automatického režimu nebo naopak; b) změna parametrů regulátoru. Hladkého přechodu v případě a) pro analogový regulátor je dosaženo ručním uvedením procesu do stavu, ve kterém je naměřená výstupní hodnota rovna referenční hodnotě. Proces je udržován v tomto stavu tak dlouho, dokud je výstup regulátoru nulový. V tomto případě je integrální část také nulová, a protože chyba je nulová, je dosaženo hladkého přechodu. Tento postup platí i pro digitální regulátory. Další metodou je pomalé přivádění referenční hodnoty na požadovanou konečnou hodnotu. Nejprve se referenční hodnota nastaví rovna aktuálnímu měření a poté se postupně ručně upraví na požadovanou hodnotu. Pokud se tento postup provádí dostatečně pomalu, integrální část signálu regulátoru zůstává tak malá, že je zajištěn hladký přechod. Nevýhodou této metody je, že vyžaduje poměrně dlouhou dobu, která závisí na povaze procesu. Omezení rychlosti změny řídicího signálu
. V mnoha řídicích systémech je nutné omezit jak amplitudu, tak rychlost změny řídicího signálu. K tomu se používají speciální ochranné obvody, připojené za kanál pro ruční zadání referenční hodnoty. u C (t) a přenos filtrovaného signálu do ovladače u L (t), jak je znázorněno na Obr. 30.5. Výsledkem je, že proces „vidí“ tento řídicí signál namísto ručně zadaného. Tento způsob se obvykle používá při regulaci elektrických pohonů. Omezení rychlosti změny signálu lze dosáhnout jednoduchou zpětnovazební smyčkou. Signál ručního ovládání u C (t), fungující jako reference, je porovnána s platným řídicím signálem u L (t). Za prvé, jejich rozdíl je omezen limity uemin A uEmAch. Výsledná hodnota je pak integrována, přičemž integrál je aproximován konečným součtem. Algoritmus pro omezení rychlosti změny je následující: pokud (ue< uemin) then uelim:= uemin
(*функция ограничения*)
else if (ue < uemax) then uelim:= ue else uelim:= uemax; uL = uL_old + taus*uelim; Výpočetní vlastnosti algoritmu PID regulátoru.
Digitální implementace PID regulátoru v důsledku sekvenční povahy výpočtů vede ke zpožděním, která se v analogové technologii nevyskytují. Kromě toho některá omezení (ochrana saturace a algoritmy měkkého přechodu) vyžadují, aby výstup regulátoru a snímač MI probíhaly současně. Výpočetní zpoždění je proto nutné omezit na minimum. K tomu jsou některé prvky digitálního regulátoru vypočteny před časem vzorkování. U regulátoru s ochranou proti saturaci lze integrální část vypočítat předem pomocí dopředných rozdílů u já
(k + 1)
=u já (k)+c 1 · E
(k)
+ C 2 ·
[u
(k)
– u d
(k)
] , Kde u
– omezená hodnota u d
; T t
je koeficient zvaný časová konstanta sledování. Diferenciální část vypadá C 3
=
(1–
b)
· K· T d
/t s
;
X
(k- 1) =
b·
u D (k- 1)+c 3 · y
(k- 1). variabilní X lze aktualizovat ihned po daném časovém okamžiku k X
(k) =
b·
X(k- 1)+c 3 (1 –
b)
· y
(k). Tím pádem, u D (k
+
1)
lze vypočítat z (24.2), jakmile je získán výsledek měření y(k
+
1). Optimalizace výpočtů je nezbytná, protože digitální regulátor musí někdy provést několik tisíc řídicích operací za sekundu. Za těchto podmínek je důležité, aby některé koeficienty byly k dispozici okamžitě, než aby byly pokaždé přepočítávány. Kromě toho průmyslové regulátory nemají nejrychlejší procesory ( i 386, 486). Pořadí a typ výpočtů proto velmi ovlivňují rychlost kontrolních operací. PID algoritmus
. Příklad programu PID regulátoru v Pascalu. Výpočet koeficientů C 1 ,C 2 a C 3 je nutné provést pouze v případě, že se změní parametry regulátoru K,
T i
,
T d A T F. Algoritmus ovladače se provádí v okamžiku každého vzorku. Program má ochranu proti saturaci integrální součásti. (*Předběžný výpočet koeficientů*) c1:=K*taus /
Ti; (* Rovnice 23.7 *) с2:= taus /
Tt; (* Rovnice 24.1 *) beta:=Td /
(Td+taus*N); (* Rovnice 24.1 *) c3:= K*Td*(l-beta) /
taus; (* Rovnice 24.2 *) c4:= c3*(1 - beta); (* místní konstanta*) (* Řídicí algoritmus *) uc:=ADinput(ch1); (* vstup referenční hodnoty, analogový vstup *) y:= AD_input(ch2); (* měřicí vstup, analogový vstup *) e:= uc-y; (* výpočet chyby kontroly *) ppart:= K*e; (*poměrná část*) dpart:= x - (c3*y); (* diferenciální část, *) ud:=uO+ppart+ipart+dpart; (* výstup regulátoru před oříznutím*)if(ud Studenti, postgraduální studenti, mladí vědci, kteří využívají znalostní základnu ve svém studiu a práci, vám budou velmi vděční. Hostováno na http://www.allbest.ru Ministerstvo školství a vědy Ruské federace Federální státní rozpočtová vzdělávací instituce vyšší odborné vzdělání "KUBÁNSKÁ STÁTNÍ UNIVERZITA" (FGBOU VPO "KubGU") BAKALÁŘSKÁ ZÁVĚREČNÁ KVALIFIKAČNÍ PRÁCE Vývoj a návrh PID regulátorů Práci provedl Roman Valerievich Presnyakov Vědecký ředitel Dr. Fyzikální matematika věd, profesor E.N. Tumaev Kontrolor cand. Fyzikální matematika věd, docent A. A. Martynov Krasnodar 2015 Závěrečná kvalifikační práce 83 stran, 29 obrázků, 42 zdrojů. ŘÍZENÍ PID, EMBEDDED SYSTÉMY, MIKROKONTROLÉRY, SOFTWAROVÉ MODULY, MSP430, PŘERUŠENÍ Předmětem studia závěrečné kvalifikační práce je studium obecných principů stavby proporcionálně-integrálně-diferenciálních technologických regulátorů a návrh algoritmu pro regulátory teploty na bázi levných mikrokontrolérů MSP430 (Texas Instruments). Příspěvek poskytuje přehled prostředků moderních mikrokontrolérů a principů jejich činnosti. Je provedena analýza problematiky hardwarové a softwarové implementace technologických mikroprocesorových regulátorů. Jsou uvedena doporučení pro návrh mikroprocesorových měřicích a řídicích přístrojů a tvorbu softwaru pro vestavěné systémy. Je navržena varianta implementace algoritmu PID regulátoru. Charakteristickým rysem je použití algoritmů, které vylučují použití čísel s pohyblivou řádovou čárkou. Označení a zkratky Úvod 2. Funkce citlivosti. Digitální Pid rovnice 2.2 Diskrétní forma ovladače. Digitální rovnice PID 3. Regulační kvalita 3.1 Oslabení vlivu vnějších poruch. Kritéria kvality 4. Nastavení parametrů regulátoru. základní principy 4.1 Výběr parametrů regulátoru. Manuální a automatické nastavení 5. Programování vestavěných systémů 5.1 Obecné zásady pro vývoj vestavěných systémů 5.2 Etapy tvorby softwaru pro vestavěné systémy 5.3 Hierarchie spustitelného kódu ve vestavěných systémech 6. Algoritmus vytvořeného softwaru 6.1 Popis algoritmu činnosti PID regulátoru teploty založeného na mikrokontroléru MSP430F149 Závěr Seznam použitých zdrojů Označení a zkratky mikrokontrolér regulátoru teploty mikrokontrolér PID algoritmus Proporcionálně-integrální-diferenciální algoritmus vrstva abstrakce hardwaru (vrstva abstrakce hardwaru) Integrované vývojové prostředí (integrované vývojové prostředí) pulzní šířková modulace programovatelný logický ovladač dohledová kontrola a získávání dat (dohledová kontrola a získávání dat) sériové periferní rozhraní (sériové periferní rozhraní) rozhraní pro programování aplikací (rozhraní pro programování aplikací) automatizované pracoviště software ÚVOD Řízení technologických procesů pomocí regulátorů pracujících podle proporcionálně-integrálno-diferenčního zákona (PID regulátory) umožňuje udržovat požadovanou technologickou hodnotu s dostatečně vysokou přesností a přijatelnou hlukovou odolností vůči vnějším rušivým vlivům. Moderní PID regulátory jsou implementovány jak jako softwarový modul SCADA systému realizovaný na automatizované pracovní stanici (AWS) nebo programovatelný logický regulátor (PLC), tak jako samostatné procesní regulátory umístěné na lokálních a centrálních ovládacích skříních. Jako základní prvky zpracování a řízení informací se často používají mikroprocesory s omezenou funkčností, což vyvolává problém nedostatku hardwarových prostředků a zdražování systému. Účelem této práce je zopakovat principy stavby proporcionálně-integrálně-derivačních regulátorů a na základě přehledu vyvinout principy pro tvorbu teplotního PID regulátoru. Při tvorbě teplotního PID regulátoru byl použit programovatelný mikroprocesorový technologický měřič-regulátor F0303.2 na bázi mikrokontroléru MSP430F149, programátor MSP-FET430UIF, napěťový komparátor P3003 s rozsahem napěťového výstupu od 10 nV do 11,111110 V a třídou přesnosti 00. . Program mikrokontroléru byl vytvořen v integrovaném vývojovém prostředí IAR Embedded Workbench for MSP430 6. Technická dokumentace byla získána ze stránek výrobce mikrokontroléru. Pro plnou implementaci PID regulace v mikroprocesorovém zařízení je nutné implementovat následující subsystémy: Subsystém měření PID Algorithm Processing Subsystém Subsystém správy uživatelského rozhraní Regulační dopad výstupního subsystému 1. Principy tvorby PID regulátorů 1.1 Obecné otázky zavádění PID regulátorů Pro praktickou realizaci je nutné vzít v úvahu vlastnosti generované reálnými podmínkami aplikace a technické realizace. Mezi tyto funkce patří: Konečný dynamický rozsah změn fyzikálních proměnných v systému (např. omezený výkon ohřívače, omezená kapacita ventilu); Ne vždy je možné změnit znaménko ovládací akce (např. v systému udržování teploty často není lednička, motor nemusí mít zpětný zdvih, ne každé letadlo má negativní systém tahu); Omezená přesnost měření, která vyžaduje speciální opatření k provedení operace diferenciace s přijatelnou chybou; Přítomnost typických nelinearit téměř ve všech systémech: saturace (omezení dynamického rozsahu proměnných změn), omezení rychlosti přeběhu, hystereze a vůle; Technologický rozptyl a náhodné variace parametrů regulátoru a objektu; Diskrétní implementace ovladače; Potřeba plynulého (bezšokového) přepínání režimů ovládání; 1.2 Sestavení derivátu PID Problém numerické diferenciace je poměrně starý a běžný u digitálních i analogových regulátorů. Jeho podstata spočívá v tom, že derivace se obvykle počítá jako rozdíl dvou proměnných blízké velikosti, takže relativní chyba derivace se vždy ukáže být větší než relativní chyba numerického vyjádření diferencovatelné proměnné. Konkrétně, pokud vstup derivátoru přijímá sinusový signál A * sin (sht), pak na výstupu dostaneme A * w * cos (sht), tedy s rostoucí frekvencí w, amplitudu signálu na výkon diferenciátoru se zvyšuje. Jinými slovy, diferenciátor zesiluje vysokofrekvenční rušení, krátké impulzy a šum. Pokud rušení zesílené diferenciátorem leží mimo rozsah pracovních frekvencí PID regulátoru, lze je zeslabit pomocí horní propusti. Konstrukční provedení diferenciátoru s filtrem je znázorněno na obrázku 1. Zde to znamená, že přenosová funkce výsledného derivátoru D(s) může být reprezentována jako součin přenosové funkce ideálního derivátoru a přenosové funkce filtru prvního řádu: kde koeficient N nastavuje mezní frekvenci filtru a je obvykle zvolen rovný 2…20; T/N -- časová konstanta filtru; s je komplexní frekvence. Většího útlumu vysokofrekvenčního šumu lze dosáhnout pomocí samostatného filtru, který je zapojen do série s PID regulátorem. Obvykle se používá filtr druhého řádu s přenosovou funkcí Časová konstanta filtru je zvolena rovna TF = Ti/N, kde N = 2…20, Ti je integrační konstanta PID regulátoru. Je vhodné nevolit mezní frekvenci filtru pod frekvencí 1/Ti, protože to komplikuje výpočet parametrů regulátoru a rezervy stability. Obrázek 1 - Strukturální implementace diferenciálního členu PID regulátoru Kromě diferenciačního šumu je výkon PID regulátoru ovlivněn šumem měření. Přes zpětnovazební smyčku tyto zvuky vstupují na vstup systému a pak se objevují jako disperze řídicí proměnné u. Vysokofrekvenční hluk je škodlivý, protože způsobuje zrychlené opotřebení potrubních armatur a elektromotorů. Protože řídicím objektem je obvykle dolní propust, šum měření zřídka prochází řídicí smyčkou na výstup systému. Zvyšují však chybu měření y(t) a snižují přesnost regulace. U PID regulátorů šum se spektrem v nízkofrekvenční oblasti, způsobený vnějšími vlivy na řídicí objekt, a vysokofrekvenční šum spojený s elektromagnetickým rušením, šum na napájecí a zemní sběrnici, se vzorkováním měřeného signálu, popř. rozlišují se další důvody. Nízkofrekvenční šum je modelován jako vnější rušení d(s), vysokofrekvenční šum je modelován jako šum měření n(s). 1.3 Integrální uzel PID regulátoru. integrální saturace V ustáleném stavu as malými poruchami je většina systémů s PID regulátory lineární. Proces vstupu do režimu však téměř vždy vyžaduje zohlednění nelinearity typu „omezení“. Tato nelinearita je způsobena přirozenými omezeními výkonu, rychlosti, otáček, úhlu natočení, plochy průřezu ventilu, dynamického rozsahu atd. Řídicí smyčka v systému, který je v saturaci (když proměnná dosáhla limitu), se ukáže jako otevřená, protože když se změní proměnná na vstupu vazby s limitem, její výstupní proměnná zůstane nezměněna. Nejtypičtějším projevem režimu omezení je tzv. „integrální saturace“, ke které dochází, když systém dosáhne režimu v regulátorech s nenulovou integrační konstantou Ti? 0. Integrální saturace vede ke zpoždění přechodového procesu (obrázky 2 a 3). K podobnému efektu dochází v důsledku omezení proporcionálního a integrálního členu PID regulátoru (obrázky 4 a 5). Integrální saturace je však často chápána jako soubor efektů spojených s nelinearitou typu „omezení“. Ti = 0,1 s; T2 = 0,05 s; L = 0,02 s; K = 2; Ti = 0,06 s; Td = 0 Obrázek 2 - Odezva výstupní proměnné y(t) na skok ve vstupní akci r(t) pro PI regulátor za podmínky omezení výkonu na vstupu objektu u(t) a bez omezení (druhá objekt objednávky) Ti = 0,1 s; T2 = 0,05 s; L = 0,02 s; K = 2; Ti = 0,06 s; Td = 0 Obrázek 3 - Signál na vstupu objektu u(t) s a bez omezení výkonu (objekt druhého řádu) K = 10; Ti = 0,014 s; Td = 0,3 s; Ti = 0,1 s; T2 = 0,05 s; L = 0,02 s Obrázek 4 - Odezva výstupní proměnné y(t) na skok ve vstupní akci r(t) pro PID regulátor za podmínky omezení výkonu na vstupu objektu u(t) a bez omezení (druhá objekt objednávky) Ti = 0,1 s; T2 = 0,05 s; L = 0,02 s; K = 10; Ti = 0,014 s; Td = 0,3 s Obrázek 5 - Signál na vstupu objektu u(t) ve smyčce s PID regulátorem za podmínky omezení výkonu a bez (objekt druhého řádu) a druhého řádu kde Kp je koeficient přenosu v ustáleném stavu; T, T1, T2 - časové konstanty; L - zpoždění dopravy. Podstata problému integrální saturace spočívá v tom, že pokud signál na vstupu řídicího objektu u(t) vstoupil do saturační (limitační) zóny, a signál nesouladu r(t) - y(t) není roven nula, integrátor pokračuje v integraci, to znamená, že signál na jeho výstupu vzroste, ale tento signál se neúčastní procesu regulace a neovlivňuje objekt vlivem saturačního efektu. Řídicí systém se v tomto případě stává ekvivalentním otevřenému systému, jehož vstupní signál je roven úrovni saturace řídicího signálu u(t). U tepelných systémů je spodní limit obvykle nulový topný výkon, zatímco PID regulátor vyžaduje, aby byl na objekt aplikován „záporný topný výkon“, tedy chlazení objektu. Efekt integrální saturace je znám již dlouhou dobu. U analogových regulátorů byla jeho eliminace poměrně obtížná, protože v nich nemohl být problém vyřešen algoritmicky, ale byl vyřešen pouze hardwarem. S příchodem mikroprocesorů lze problém vyřešit mnohem efektivněji. Metody pro odstranění integrální saturace jsou obvykle předmětem vynálezů, patří do obchodního tajemství výrobních podniků a jsou chráněny patenty. Omezení rychlosti přeběhu vstupní akce. Vzhledem k tomu, že maximální hodnota vstupní akce na řídicím objektu u(t) klesá s poklesem rozdílu r(t) - y(t), pak pro odstranění omezujícího efektu můžete jednoduše snížit rychlost přeběhu požadované hodnoty. signál r(t), například pomocí filtru. Nevýhodou této metody je snížení rychlosti systému a také nemožnost eliminovat integrální saturaci způsobenou vnějšími poruchami, nikoli signálem požadované hodnoty. Když řídicí akce na objektu dosáhne saturace, zpětná vazba se přeruší a integrální složka pokračuje v růstu, i když by měla klesnout bez saturace. Proto jednou z metod, jak eliminovat integrální saturaci, je to, že ovladač monitoruje velikost regulačního působení na objekt, a jakmile dosáhne saturace, ovladač vstoupí do softwarového zákazu integrace integrální součásti. Kompenzace saturace s dodatečnou zpětnou vazbou. Vliv integrální saturace lze zeslabit monitorováním stavu akčního členu vstupujícího do saturace a kompenzací signálu přivedeného na vstup integrátoru. Struktura systému s takovým kompenzátorem je znázorněna na obrázku 6. Obrázek 6 - Kompenzace vlivu integrální saturace pomocí dodatečné zpětné vazby pro přenos chybového signálu es na vstup integrátoru Princip jeho práce je následující. Systém generuje signál nesouladu mezi vstupem a výstupem pohonu es = u - v. Signál na výstupu akčního členu je buď měřen nebo vypočítán pomocí matematického modelu (obrázek 6). Pokud es = 0, je to ekvivalent bez kompenzátoru a dostaneme normální PID regulátor. Li výkonné zařízení saturuje, pak v > u a es< 0. При этом сигнал на входе интегратора уменьшается на величину ошибки es, что приводит к замедлению роста сигнала на выходе интегратора, уменьшению сигнала рассогласования и величины выброса на переходной характеристике системы (рисунки 7 и 8). Постоянная времени Ts определяет степень компенсации сигнала рассогласования. Obrázek 7 - Odezva systému na jeden skok r(t) pro různé hodnoty časové konstanty Ts K = 7; Ti = 0,01 s; Td = 0,1 s, T1 = 0,1 s; T2 = 0,05 s; L = 0,01 s Obrázek 8 - Odezva systému na chybový signál es (objekt druhého řádu, parametry regulátoru: U některých regulátorů je vstup u komparátoru es oddělený jako samostatný vstup - „sledovací vstup“, což je výhodné při budování složitých řídicích systémů a při kaskádování několika regulátorů. Podmíněná integrace. Tato metoda je zobecněním algoritmického zákazu integrace. Po nástupu zákazu zůstává integrální složka konstantní, na stejné úrovni, jakou měla v okamžiku, kdy se objevil integrační zákaz. Zobecnění je, že k zákazu integrace dochází nejen při dosažení saturace, ale i za určitých dalších podmínek. Takovou podmínkou může být např. dosažení určité zadané hodnoty chybovým signálem e nebo výstupní veličinou y. Při vypínání integračního procesu je nutné sledovat stav integrátoru v okamžiku jeho vypnutí. Pokud akumuluje chybu a zvýší se stupeň nasycení, pak se integrace vypne. Pokud se v okamžiku vypnutí sníží stupeň nasycení, pak je integrátor ponechán zapnutý. Obrázek 9 ukazuje příklad přechodového procesu v systému s vypnutým integrátorem, když výstupní hodnota y(t) dosáhne dané hodnoty (y = 0, y = 0,2, y = 0,8). Obrázek 9 – Odezva na jeden skok r(t) systému se saturací akčního členu při různých úrovních vypnutí integrátoru y Omezený integrátor. Byla představena varianta implementace PI regulátoru pomocí integrátoru ve zpětnovazební smyčce. Pokud je tento obvod doplněn o omezovač (obrázek 10), pak signál u na výstupu nikdy nepřekročí meze stanovené prahovými hodnotami omezovače, což snižuje překmit v přechodové odezvě systému (obrázek 12). Obrázek 11 ukazuje modifikaci takového omezovače. Model ořezového efektu lze vylepšit, pokud po překročení úrovně, při které k oříznutí dochází, dojde ke snížení signálu na výstupu modelu (obrázek 13). To urychluje obnovu systému z režimu saturace. Obrázek 10 - Úprava integrátoru s omezovačem (paralelně) Obrázek 11 - Modifikace integrátoru s omezovačem (v sérii) Obrázek 12 - Odezva na jeden skok r(t) systému obsahujícího integrátor s horním omezením Uup Obrázek 13 - Vylepšená přenosová funkce modelu ořezového efektu 1.4 Rozpětí stability systému. Nyquistovo kritérium Možnost ztráty stability je hlavní nevýhodou zpětnovazebních systémů. Proto je zajištění potřebné rezervy stability nejdůležitějším krokem ve vývoji a ladění PID regulátoru. Stabilita systému s PID regulátorem je schopnost systému vrátit se ke sledování žádané hodnoty po odeznění vnějších vlivů. V kontextu této definice se vnějšími vlivy rozumí nejen vnější rušení působící na objekt, ale jakékoli rušení působící na kteroukoli část uzavřeného systému, včetně šumu měření, časové nestability žádané hodnoty, šumu vzorkování a kvantování, šumu a chyby ve výpočtu. Všechny tyto poruchy způsobují odchylky systému od rovnovážné polohy. Li po ukončení jejich vlivu se systém vrací do rovnovážné polohy, pak je považován za stabilní. Při analýze stability PID regulátorů se obvykle omezuje na studium odezvy systému na skokovou změnu žádané hodnoty r(t), šum měření n(t) a vnější rušení d(t). Ztráta stability se projevuje jako neomezený nárůst řízené veličiny objektu nebo jako její kmitání s rostoucí amplitudou. Ve výrobních podmínkách nevedou pokusy o dosažení stability systému s PID regulátorem empiricky, bez jeho identifikace, vždy k úspěchu (především to platí pro systémy s objektem vyššího řádu nebo objekty, které je obtížné identifikovat , stejně jako systémy s velkým dopravním zpožděním) . Zdá se, že stabilita je mystická vlastnost, kterou nelze vždy ovládat. Pokud je však proces identifikován dostatečně přesně, mystika zmizí a analýza stability se redukuje na analýzu diferenciální rovnice popisující uzavřenou smyčku se zpětnou vazbou. Prakticky zajímavá je analýza rozpětí stability, to znamená stanovení číselných hodnot kritérií, která vám umožní určit, jak daleko je systém od stavu nestability. Nejúplnější informace o meze stability systému lze získat řešením diferenciální rovnice, která popisuje uzavřený systém pod vnějšími poruchami. Tento proces je však příliš časově náročný, proto se pro lineární systémy používají zjednodušené metody pro odhad rezervy stability bez řešení rovnic. Budeme uvažovat dvě metody odhadu: použití hodografu komplexní frekvenční odezvy s otevřenou smyčkou (Nyquistovo kritérium) a použití logaritmické frekvenční odezvy a fázové odezvy (Bodeovy grafy). Stabilní systém se může stát nestabilním při malých změnách svých parametrů, například v důsledku jejich technologického rozptylu. Proto dále analyzujeme funkci citlivosti systému s PID regulátorem, který nám umožňuje identifikovat podmínky, za kterých se systém stává hrubým (necitlivým na změny jeho parametrů). Systém, který si zachovává danou rezervu stability v celém rozsahu změn parametrů v důsledku jejich technologických změn, stárnutí, provozních podmínek, v celém rozsahu změn parametrů zatížení, jakož i v celém rozsahu poruch působících na systém v reálném provozní podmínky, se nazývá robustní. Někdy se jako ekvivalentní pojmy používají robustnost a hrubost. Nyquistovo kritérium. Uvažujme systém sestávající z regulátoru R a regulačního objektu P (obrázek 14), který je získán eliminací obvodu signálu žádané hodnoty z klasického systému s PID regulátorem. Budeme předpokládat, že zpětná vazba je otevřená a k jejímu uzavření stačí spojit body x a y. Předpokládejme nyní, že vstupu x je dán signál Poté, po průchodu ovladačem a řídicím objektem, se tento signál objeví na výstupu y se změněnou amplitudou a fází ve tvaru: y(t) = ? |G(jw0)|sin(w0t + ?), (4) kde G(jsh) = R(jsh)P(jsh) je komplexní frekvenční odezva (CFC) systému, ? = arg(G(jш0)) - argument CCH, |G(jш0)| - CFC modul na frekvenci w0. Při průchodu regulátorem a objektem se tedy amplituda signálu změní v poměru k modulu a fázi - o hodnotu argumentu CFC. Obrázek 14 - Struktura regulačního systému s otevřenou smyčkou s PID regulátorem pro analýzu stability Pokud nyní uzavřeme body x a y, signál bude cirkulovat v uzavřené smyčce a podmínka y(t) = x(t) bude splněna. Pokud navíc |G(jш0)| ? 1 a? \u003d 180 °, to znamená, že po průchodu smyčkou signál vstupuje na vstup regulátoru ve stejné fázi jako v předchozím cyklu, pak po každém průchodu smyčkou se amplituda sinusového signálu zvýší, dokud nedosáhne Hranice rozsahu linearity systému, po jejímž překročení se tvar kmitání stává odlišným od sinusového. V tomto případě lze k analýze stability použít metodu harmonické linearizace, kdy je uvažována pouze první harmonická zkresleného signálu. V ustáleném stavu, po omezení amplitudy kmitání, bude v důsledku rovnosti y(t) = x(t) splněna následující podmínka: |G(jw0)|=1, tj. G(jw0)= - 1 (5) Řešením rovnice G(jw0) = -1 můžete zjistit frekvenci kmitů w0 v uzavřené soustavě. Komplexní frekvenční charakteristika G(jш) je graficky znázorněna ve formě hodografu (Nyquistův diagram) - grafu v souřadnicích Re a Im (obrázek 15). Šipka na čáře hodografu ukazuje směr pohybu "tužky" s rostoucí frekvencí. Bod G(jw0) = -1, který odpovídá podmínce existence netlumených kmitů v soustavě, má na tomto grafu souřadnice Re = -1 a Im = 0. Proto je Nyquistovo kritérium stability formulováno následovně : obvod, který je stabilní v otevřeném stavu, zůstane stabilní i po svém uzavření, pokud jeho CFC v otevřeném stavu nepokryje bod se souřadnicemi [-1, j0]. Přesněji řečeno, při pohybu po trajektorii hodografu ve směru rostoucí frekvence musí bod [-1, j0] zůstat vlevo, aby byla uzavřená smyčka stabilní. K=6; Ti = T2 = 0,1 s; L = 0,01 s Obrázek 15 - Tři hodografy CFC otevřeného systému G(jw) pro objekt druhého řádu Obrázek 16 ukazuje odezvy uzavřeného systému se třemi různými hodografy (obrázek 15) na krok jediné nastavené hodnoty. Ve všech třech případech je systém stabilní, ale míra tlumení kmitů a tvar přechodu jejich proces je jiný. Intuitivně je jasné, že systém s parametry Ti = 0,01 s, Td = 0,1 s je nejblíže přechodu do stavu netlumeného kmitání s malou změnou svých parametrů. Proto při návrhu PID regulátoru je důležité zajistit ani ne tak stabilitu, jako jeho rezervu, která je nezbytná pro normální fungování systému v reálných podmínkách. Rozpětí stability se odhaduje jako stupeň odlehlosti CFC od kritického bodu [-1, j0]. Pokud |G(jш0)|< 1, то можно найти, во сколько раз осталось увеличить передаточную функцию, чтобы результирующее усиление вывело систему в колебательный режим: gm|G(jщ0)| = 1, откуда Marže zisku gm je hodnota, kterou se musí přenosová funkce systému s otevřenou smyčkou G(jsh180) vynásobit tak, aby se jeho modul při frekvenci fázového posunu 180° (sh180) rovnal 1. Pokud při frekvenci w180 zisk v otevřené smyčce je G(jsh180) = -1/gm (obr. 15), pak další zisk gm přivede systém k bodu [-1, j0], protože (-1/gm) gm = -1. Podobně je zaveden koncept fázového rozpětí: jedná se o minimální hodnotu m, o kterou je nutné zvýšit fázový posun v otevřeném systému arg(G(jw)) tak, aby celkový fázový posun dosáhl 180°, tzn. Znaménko „+“ před arg(G(jш1)) je proto, že arg(G(jш1))< 0. Для оценки запаса устойчивости используют также минимальное расстояние sm от кривой годографа до точки [-1, j0] (рисунок 15). V praxi se za přijatelné považují hodnoty gm = 2...5,m = 30...60°, sm = 0,5...0,8. Pro graf na obrázku 15 mají tato kritéria následující hodnoty: Gml = 12,1; mi = 15°; sm1 = 0,303 (pro případ Ti = 0,01 s, Gm2 = 11,8; m2 = 47,6°; sm2 = 0,663 (pro případ Ti = 0,05 s, Gm3 = 1,5; m3 = 35,2°; sm3 = 0,251 (pro případ Ti = 0,05 s, Pokud křivka hodografu protíná skutečnou osu v několika bodech, pak pro posouzení rezervy stability vezměte ten, který je nejblíže bodu [-1, j0]. U složitějšího hodografu lze použít odhad rezervy stability jako rezervy zpoždění. Rozpětí zpoždění je minimální zpoždění přidané do smyčky, aby byla nestabilní. Nejčastěji se toto kritérium používá k posouzení rezervy stability systémů pomocí Smithova prediktoru. Kritérium frekvenční stability Pro grafické znázornění přenosové funkce otevřeného systému a posouzení rezervy stability lze použít logaritmickou frekvenční odezvu a fázovou odezvu (obrázek 17). Pro posouzení fázové rezervy se nejprve pomocí frekvenční odezvy najde frekvence u1 (mezní frekvence nebo frekvence jednotkového zisku), při které G(ju1) = 1, pak se z PFC zjistí odpovídající fázová rezerva. Chcete-li odhadnout ziskovou rezervu, nejprve pomocí PFC najděte frekvenci w180, při které je fázový posun 180°, poté zjistěte ziskovou rezervu z frekvenční odezvy. Obrázek 17 ukazuje příklady grafických konstrukcí pro odhad zisku a fázové rezervy pro systém, jehož hodografy jsou na obrázku 15. Pokud je fázová rezerva otevřené smyčky 0° nebo rezerva zesílení je 1, systém bude po uzavření zpětnovazební smyčky nestabilní. Obrázek 16 - Přechodná odezva uzavřeného systému, který má hodografy zobrazené na obrázku 15 2. Funkce citlivosti. rovnice digitálního PID regulátoru 2.1 Funkce citlivosti. robustnost. Bezšokové přepínání režimů ovládání Přenosová funkce reálného objektu P(s) se může během provozu změnit o hodnotu DP(s), například v důsledku změn zatížení hřídele motoru, počtu vajec v inkubátoru, hladiny nebo složení kapaliny v autoklávu v důsledku stárnutí a opotřebení materiálu, vzniku vůle, změn mazání atd. Správně navržený automatický řídicí systém by si měl udržet své ukazatele kvality nejen v ideálních podmínkách, ale i v přítomnosti uvedených škodlivých faktorů. Posoudit vliv relativní změny přenosové funkce objektu DP/P na přenosovou funkci uzavřeného systému Gcl y(s) = r(s), Gcl(s) = (8) najdi rozdíl dGcl: Vydělením obou stran této rovnosti Gcl a dosazením Gcl = PR/(1+PR) na pravou stranu dostaneme: Obrázek 17 - Vyhodnocení zesílení a fázové rezervy pro systém s hodografem znázorněným na obrázku 15 Z (10) je viditelný význam koeficientu S - charakterizuje míru vlivu relativní změny přenosové funkce objektu na relativní změnu přenosové funkce uzavřené smyčky, to znamená, že S je koeficient citlivosti uzavřené smyčky na změnu přenosové funkce objektu. Protože koeficient S \u003d S (jsh) je závislý na frekvenci, nazývá se funkce citlivosti. Jak vyplývá z (10), Představme si notaci: Hodnota T se nazývá doplňková (dodatečná) funkce citlivosti, protože S + T = 1. Funkce citlivosti umožňuje vyhodnotit změnu vlastností systému po sepnutí zpětné vazby. Protože přenosová funkce otevřeného systému je rovna G = PR, a uzavřeného systému Gcl = PR/(1+PR), pak je jejich poměr Gcl/G = S. Podobně pro otevřený systém je přenosová funkce od vstupu poruch d k výstupu uzavřeného systému je (viz ) P(s)/(1 + P(s)R(s)), a otevřená smyčka je P(s), takže jejich poměr je také S. Pro přenosovou funkci ze vstupu měřicího šumu n na výstup systému lze získat stejný poměr S. Při znalosti tvaru funkce S(jw) (např. obrázek 18) tedy můžeme říci, jak se po uzavření zpětnovazební smyčky pro různé frekvence změní potlačení vnějších vlivů na systém. Je zřejmé, že zvuky ležící ve frekvenčním rozsahu, ve kterém |S(jш)| > 1, po zavření se zpětná vazba zvýší a šum s frekvencemi, při kterých |S(jш)|< 1, после замыкания обратной связи будут ослаблены. Nejhorší případ (největší zesílení vnějších vlivů) bude pozorován při maximální frekvenci Ms modulu funkce citlivosti (obrázek 18): Maximum funkce citlivosti lze vztáhnout k meze stability sm (obrázek 15). Za tímto účelem věnujeme pozornost skutečnosti, že |1 + G(jш)| představuje vzdálenost od bodu [-1, j0] k aktuálnímu bodu na hodografu funkce G(jш). Proto minimální vzdálenost od bodu [-1, j0] do funkce G(jш) se rovná: Porovnáním (13) a (14) můžeme dojít k závěru, že sm = 1/Ms. Pokud modul G(jsh) klesá s rostoucí frekvencí, pak, jak je vidět z obrázku 15, (1-sm) ? 1/gm. Dosadíme-li zde poměr sm = 1/Ms, získáme odhad ziskové rezervy vyjádřený jako maximum funkce citlivosti: Podobně, ale s hrubšími předpoklady, můžeme napsat odhad fázového rozpětí z hlediska maxima funkce citlivosti: Například pro Ms = 2 dostaneme gm ? 2 a? 29°. Obrázek 18 - Funkce citlivosti pro systém s hodografy zobrazený na obrázku 13 Robustnost je schopnost systému udržet danou rezervu stability s odchylkami jeho parametrů způsobenými změnou zatížení (např. při změně zatížení pece se mění její časové konstanty), technologickým rozšířením parametrů a jejich stárnutím, vnějšími vlivy. , chyby výpočtu a chyba objektového modelu. Pomocí konceptu citlivosti můžeme říci, že robustnost je nízká citlivost hranice stability na změny parametrů objektu. Pokud se parametry objektu mění v malých mezích, kdy je možné použít náhradu diferenciálu konečným přírůstkem, lze vliv změn parametrů objektu na přenosovou funkci uzavřeného systému odhadnout pomocí funkce citlivosti (10). Zejména lze konstatovat, že na těch frekvencích, kde je modul funkce citlivosti malý, bude vliv změn parametrů objektu na přenosovou funkci uzavřeného systému, a tedy na meze stability, malý. Pro posouzení dopadu velkých změn parametrů objektu představujeme přenosovou funkci objektu ve formě dvou pojmů: P = P0 + DP, (17) kde P0 je vypočtená přenosová funkce, DP je odchylka od P0, což musí být stabilní přenosová funkce. Potom může být zisk smyčky otevřeného systému reprezentován jako G = RP0 + RDP = G0 + RDP. Protože vzdálenost od bodu [-1, j0] k aktuálnímu bodu A na hodografu nerušeného systému (pro který DP = 0) je rovna |1 + G0| (Obrázek 19), podmínka stability pro systém s odchylkou zisku smyčky RDP může být reprezentována jako: |RDP|< |1+G0|, kde T je doplňková funkce citlivosti (12). Nakonec můžeme napsat poměr: která musí být splněna, aby systém zůstal stabilní při změně parametrů procesu o hodnotu DP(jsh). Redukce nul a pólů. Protože přenosová funkce s otevřenou smyčkou G = RP je součinem dvou přenosových funkcí, které v obecný případ mít čitatel i jmenovatel, pak je možné zrušit póly, které leží v pravé polorovině nebo se k ní blíží. Protože v reálných podmínkách, kdy dochází k rozptylu parametrů, je takové snížení prováděno nepřesně, může nastat situace, kdy teoretická analýza vede k závěru, že systém je stabilní, i když ve skutečnosti s malou odchylkou procesních parametrů z vypočtených hodnot se stává nestabilním. Při každém zmenšení pólů je tedy nutné zkontrolovat stabilitu systému s reálným rozptylem parametrů objektu. Obrázek 19 - Vysvětlení odvození poměru (18) Druhým efektem zkrácení pólů je objevení se výrazného rozdílu mezi dobou ustálení přechodového procesu v uzavřeném systému pod vlivem signálu žádané hodnoty a vnějšími poruchami. Proto je nutné kontrolovat odezvu syntetizovaného regulátoru pod vlivem nejen signálu žádané hodnoty, ale i externích poruch. Bezšokové přepínání režimů ovládání. U PID regulátorů mohou existovat režimy, kdy se jejich parametry náhle změní. Například, když je potřeba změnit integrační konstantu v běžícím systému nebo když je po ručním ovládání systému nutné přejít do automatického režimu. V popsaných případech může dojít k nežádoucím překmitům regulované veličiny, pokud nebudou přijata zvláštní opatření. Vzniká tedy problém plynulého („bezšokového“) přepínání provozních režimů nebo parametrů regulátoru. Hlavní metodou řešení problému je vybudování takové struktury regulátoru, kdy je změna parametru provedena před integrační fází. Například s měnícím se parametrem Ti = Ti (t) lze integrální člen zapsat ve dvou formách: I(t) = nebo I(t) =. V prvním případě, kdy se náhle změní Ti (t), se integrální člen změní náhle, ve druhém případě se změní plynule, protože Ti (t) je pod znaménkem integrálu, jehož hodnota se nemůže náhle změnit. Podobná metoda je implementována v inkrementální podobě PID regulátoru (viz část "Inkrementální forma digitálního PID regulátoru") a v sériové podobě PID regulátoru, kde se integrace provádí v konečné fázi výpočtu regulace. 2.2 Diskrétní regulátor rovnice digitálního PID regulátoru Spojité proměnné jsou vhodné pro analýzu a syntézu PID regulátorů. Pro technickou realizaci je nutné přejít na diskrétní formu rovnic, protože základem všech regulátorů je mikrokontrolér, regulátor nebo počítač, který pracuje s proměnnými získanými z analogových signálů po jejich časové kvantizaci a vzorkování úrovně. Vzhledem ke konečnému času pro výpočet regulační akce v mikrokontroléru a zpoždění při převodu analogového signálu na digitální mezi okamžikem, kdy analogový signál dorazí na vstup regulátoru a výskytem regulační akce na jeho výstupu, dochází k nežádoucímu zpoždění. se objeví, což zvyšuje celkové zpoždění v regulační smyčce a snižuje rezervu stability. Hlavním efektem, který se objevuje při samplování a který je často „znovuobjevován“, je výskyt alias frekvencí ve spektru kvantovaného signálu v případě, kdy kvantovací frekvence není dostatečně vysoká. K podobnému efektu dochází při natáčení protáčejícího se kola auta. Frekvence alias signálu je rovna rozdílu mezi interferenční frekvencí a kvantizační frekvencí. V tomto případě je vysokofrekvenční interferenční signál posunut do nízkofrekvenční oblasti, kde je superponován s užitečným signálem a vytváří velké problémy, protože je v této fázi nelze filtrovat. Pro eliminaci alias efektu je nutné před vstup analogově-digitálního převodníku instalovat analogový filtr, který by utlumil šum minimálně o řád na frekvenci rovné polovině kvantovací frekvence. Obvykle se používá Butterworthův filtr druhého nebo vyššího řádu. Druhým řešením problému je zvýšení kvantizační frekvence tak, aby byla alespoň 2x (podle Kotelnikovovy věty) vyšší než maximální frekvence šumového spektra. To umožňuje použít digitální dolní propust po kvantizaci. S takovou vzorkovací frekvencí je přijímaný digitální signál co do množství informací zcela ekvivalentní analogovému a všechny vlastnosti analogového regulátoru lze rozšířit na digitální. Přechod na konečně-diferenční rovnice. Přechod na diskrétní proměnné v rovnicích analogového regulátoru se provádí nahrazením derivací a integrálů jejich diskrétními protějšky. Pokud je rovnice zapsána ve formě operátora, pak se nejprve provede přechod z oblasti obrázku do původní oblasti. V tomto případě je derivační operátor nahrazen derivací, integrační operátor je nahrazen integrálem. Existuje mnoho způsobů, jak aproximovat derivace a integrály jejich diskrétními protějšky, které jsou popsány v kurzech numerických metod řešení diferenciálních rovnic. V PID regulátorech jsou nejčastější nejjednodušší typy aproximace derivace konečným rozdílem a integrálu konečným součtem. Zvažte integrální člen PID regulátoru: Časově rozlišujeme obě části Dostaneme, že nahradíme diferenciály v tomto výrazu konečnými rozdíly (levé rozdíly). kde index i znamená, že daná hodnota byla vzata v čase ti (všimněte si, že zde a níže index i v Ti neoznačuje číslo časového kroku, ale integrální koeficient PID regulátor). Z posledního výrazu dostaneme: Tak lze vypočítat další hodnotu integrálu se znalostí předchozí a hodnoty chyby v předchozím čase. Pokud však poměr Dt/Ti není dostatečně malý, má takový vzorec tendenci akumulovat chybu výpočtu v průběhu času. Další integrační vzorec je stabilnější - se správnými rozdíly, když se chyba bere ve stejnou dobu jako vypočítaný integrál: Zvažte diferenciální člen PID regulátoru s filtrem: Předáním tohoto vzorce z obrázků do originálů dostaneme: Nahradíme-li diferenciály konečnými přírůstky, získáme diferenční rovnici: Všimněte si, že pro konvergenci iteračního procesu (21) je to nutné Když Dt > Td/N, iterační proces (21) se stane oscilačním, což je pro PID regulátor nepřijatelné. Diferenční rovnice získaná pomocí správných rozdílů má nejlepší vlastnosti: Zde je podmínka konvergence splněna pro všechny Dt a pro žádné hodnoty parametrů nedochází k oscilacím. Navíc poslední vzorec umožňuje „vypnout“ diferenciální složku v PID regulátoru nastavením Td = 0, což nelze provést ve výrazu (21), protože v tomto případě dochází k dělení nulou. Pro numerické derivování a integraci můžete použít ještě přesnější vzorce, známé z kurzu numerických metod řešení rovnic. Hodnota kvantizačního cyklu Dt je volena co nejmenší, což zlepšuje kvalitu regulace. Aby byla zajištěna dobrá kvalita regulace, nemělo by to být více než 1/15...1/6 doby ustavení přechodové odezvy objektu na úrovni 0,95 nebo 1/4...1/6 hodnota zpoždění přepravy. Při více než dvojnásobném zvýšení kvantizační frekvence oproti horní frekvenci spektra rušivých signálů (podle Kotelnikovovy věty) však nedochází k dalšímu zlepšení kvality regulace. Pokud na vstupu regulátoru není žádný antialias filtr, pak je kvantizační frekvence zvolena 2krát vyšší než horní mezní frekvence interferenčního spektra, aby bylo možné použít digitální filtrování. Mělo by se také vzít v úvahu, že výkonné zařízení musí mít čas na vypracování během doby Dt. Pokud je regulátor používán nejen pro regulaci, ale i pro signalizaci alarmu, pak kvantizační cyklus nemůže být menší než povolené zpoždění pro činnost alarmového signálu. S malým kvantizačním cyklem narůstá chyba ve výpočtu derivace. K jeho snížení lze využít vyhlazování přijatých dat na několika shromážděných bodech před fází diferenciace. Rovnice digitálního PID regulátoru. Na základě výše uvedeného lze rovnici diskrétního PID regulátoru zapsat jako: kde i je číslo časového kroku. Pro spuštění algoritmu obvykle volíme uD0 = 0, I0 = 0, e0 = 0, ale mohou existovat i jiné počáteční podmínky, v závislosti na významu konkrétního kontrolního problému. Všimněte si, že algoritmus získaný jednoduchým nahrazením operátorů diferenciace a integrace v klasické rovnici PID regulátoru konečné rozdíly a konečné součty má špatnou stabilitu a nízkou přesnost, jak bylo uvedeno výše. Jak se však vzorkovací frekvence zvyšuje, rozdíl mezi výše uvedenými dvěma algoritmy se maže. Inkrementální forma digitálního PID regulátoru. Poměrně často, zejména u neuronových a fuzzy regulátorů, se rovnice PID regulátoru používá ve formě závislosti přírůstku regulační veličiny na regulační chybě a jejích derivací (bez integrálního členu). externí zařízení hraje roli integrátoru, například konvenční nebo krokový motor. Úhel natočení jeho osy je úměrný hodnotě řídicího signálu a času. Ve fuzzy regulátorech může odborník při formulování fuzzy pravidel formulovat závislost řídicí proměnné na hodnotě derivace, ale nemůže formulovat závislost na hodnotě integrálu, protože integrál si „pamatuje“ celou historii změny chyby, která člověk si nemůže vzpomenout. Inkrementální tvar PID regulátoru získáme derivováním rovnice (25): Pro získání nulové chyby řízení musí být na výstupu inkrementálního regulátoru nainstalován integrátor (obrázek 20): Obrázek 20 - Přírůstkový tvar PID regulátoru Převedením získaných výrazů do konečných diferencí získáme diskrétní tvar inkrementálního PID regulátoru: kde Dui+1 = ui+1 - ui; Dei = ei - ei-1. Stabilnější a přesnější diferenční rovnici lze získat dosazením výrazů pro ui+1 a ui z (24) do vzorce Dui+1 = ui+1 - ui. Inkrementální forma regulátoru je vhodná pro použití v mikrokontrolérech, protože v něm se většina výpočtů provádí v přírůstcích, které mohou být reprezentovány slovem s malým počtem binárních číslic. Chcete-li získat hodnotu řídicí proměnné, můžete v konečné fázi výpočtů provést kumulativní sčítání: ui+1 = ui + Dui+1. Před výpočtem parametrů regulátoru je nutné formulovat cíl a kritéria kvality regulace a také omezení velikosti a rychlosti změny veličin v systému. Tradičně jsou hlavní indikátory kvality formulovány na základě požadavků na formu reakce uzavřeného systému na skokovou změnu žádané hodnoty. Toto kritérium je však velmi omezené. Zejména nevypovídá nic o míře útlumu šumu měření nebo vlivu vnějších rušení, může navodit mylnou představu o robustnosti systému. Pro úplný popis nebo testování systému s PID regulátorem je proto zapotřebí řada dalších indikátorů kvality, o kterých bude řeč později. V obecném případě nelze výběr indikátorů kvality zcela formalizovat a musí být proveden na základě smyslu řešeného problému. 3. Regulační kvalita 3.1 Výkonová kritéria Tlumení vlivu vnějších rušení Volba kritéria kvality regulace závisí na účelu, pro který je regulátor používán. Cílem by mohlo být: Udržování konstantní hodnoty parametru (například teploty); Sledování nastavené hodnoty nebo softwarové ovládání; Ovládání klapky v nádrži na kapalinu atd. Pro konkrétní úkol může být nejdůležitějším faktorem: Forma reakce na vnější poruchy (doba ustálení, překmit, doba odezvy atd.); Tvar odezvy na šum měření; Forma odezvy na signál požadované hodnoty; Robustnost ve vztahu k rozložení parametrů řídicího objektu; Úspora energie v řízeném systému; Minimalizace hluku měření. U klasického PID regulátoru se parametry, které jsou nejlepší pro sledování žádané hodnoty, obecně liší od parametrů, které jsou nejlepší pro tlumení vlivu vnějších poruch. Aby byly oba parametry zároveň optimální, je nutné použít PID regulátory se dvěma stupni volnosti. Přesné sledování změn žádaných hodnot je nezbytné v systémech řízení pohybu, v robotice; v systémech řízení procesů, kde obvykle zůstává nastavená hodnota po dlouhou dobu nezměněna, je vyžadován maximální útlum vlivu zátěže (vnější poruchy); v systémech řízení zásobníků kapaliny je nutné zajistit laminární proudění (minimalizace rozptylu výstupní veličiny regulátoru) atd. Jak je ukázáno v pododdíle, zpětná vazba oslabuje vliv externích poruch v |S(jш)| časy, s výjimkou těch frekvencí, při kterých |S(jw)|. Externí poruchy mohou být aplikovány na objekt v mnoha jeho různých částech, avšak když není konkrétní místo neznámé, má se za to, že porucha působí na vstup objektu. V tomto případě je reakce systému na vnější poruchy určena přenosovou funkcí ze vstupu externích poruch na výstup systému: Protože vnější poruchy obvykle leží v nízkofrekvenční části spektra, kde |S(jш)| a následně T, pak výraz (28) lze zjednodušit: Pro oslabení vlivu vnějších rušení (zejména vlivu zátěže) lze snížit integrační konstantu Ti. V časové oblasti se odezva na vnější poruchy odhaduje z odezvy na jeden skok d(t). Snížení vlivu šumu měření: Přenosová funkce z místa aplikace šumu na výstup systému je: Vzhledem ke snížení frekvenční charakteristiky objektu o vysoké frekvence funkce citlivosti má tendenci k 1 (obrázek 18). Proto je nemožné snížit vliv šumu měření pomocí zpětné vazby. Tyto šumy jsou však snadno eliminovány použitím nízkopropustných filtrů a správným stíněním a uzemněním. Uzavřený systém zůstává stabilní, když se parametry objektu změní o hodnotu DP(jsh), pokud je splněna podmínka (18). Kritéria kvality v časové oblasti. K posouzení kvality regulace v uzavřeném systému s PID regulátorem se obvykle používá postupná vstupní akce a řada kritérií k popisu formy přechodného procesu (obrázek 21): Maximální chyba ovládání a čas Tmax, ve kterém chyba dosáhne tohoto maxima; Integrovaná absolutní chyba Integrál druhé mocniny chyby Snížit d (toto je poměr prvního maxima k druhému, typická hodnota d=4 nebo více) poznamenáváme, že v literatuře lze nalézt i další definice úbytku tlumení, zejména jako nebo jako koeficient b/a v exponentu exponentu popisujícího obálku tlumených kmitů; Statická chyba e0 (jedná se o konstantní chybu v rovnováze, tj. v ustáleném neboli statickém režimu systému); Doba ustálení Te s danou chybou es (to je doba, po které chyba regulace nepřekročí nastavenou hodnotu es; obvykle es = 1 %, méně často 2 % nebo 5 % - resp. doba ustálení je označena T0. 01, T0,02, T0,05); Overshoot emax (toto je překročení první špičky nad hodnotou ustáleného stavu proměnné, obvykle vyjádřené jako procento hodnoty ustáleného stavu); Doba náběhu Tr (je to časový interval, během kterého výstupní veličina stoupne z 10 na 90 % své ustálené hodnoty); Perioda tlumených kmitů Tcl (přesně řečeno, tlumené kmity nejsou periodické, proto je zde perioda chápána jako vzdálenost mezi dvěma sousedními maximy přechodové charakteristiky). Obrázek 21 - Kritéria kvality regulace v časové oblasti U systémů řízení pohybu se rampová funkce častěji používá jako testovací signál než funkce skoku, protože elektromechanické systémy mají obvykle omezenou rychlost přeběhu výstupní hodnoty. Výše uvedená kritéria se používají k posouzení kvality odezvy jak na změny nastavené hodnoty, tak na dopad vnějších poruch a hluku měření. Kritéria kvality frekvence. Ve frekvenční oblasti se obvykle používají následující kritéria získaná z grafu amplitudově-frekvenční odezvy uzavřeného systému y (u) (obrázek 22): Šířka pásma u-3dB (nebo u0,7) na úrovni -3 dB (nebo na úrovni 1/ = 0,7) - frekvenční pásmo od 0 do u-3dB = u0,7, v rámci kterého křivka frekvenční odezvy klesá o ne více než o 3 dB vzhledem k jeho hodnotě při nulové frekvenci y(0); Oscilace M - poměr maximální (špičkové) hodnoty frekvenční odezvy ymax k její hodnotě při nulové frekvenci y(0), tedy v ustáleném stavu. typické hodnoty jsou M = 1,5...1,6; Rezonanční frekvence systému wp je frekvence, při které frekvenční charakteristika dosáhne svého maxima ymax = y(wp). Frekvenční kritéria skutečných regulátorů nelze jednoznačně vztáhnout k časovým kritériím z důvodu nelinearit (většinou se jedná o nelinearity „omezujícího“ typu) a algoritmů pro eliminaci efektu integrální saturace. Je však přibližně možné stanovit následující vztahy mezi kritérii ve frekvenční a časové oblasti: Frekvence maximální přenosové charakteristiky uzavřeného systému přibližně odpovídá periodě tlumených kmitů odezvy na stupňovitý vstup - h; Čím pomaleji vibrace ubývají, tím větší je oscilační index M. Volba parametrů regulátoru. V obecná teorie automatické ovládání struktura regulátoru je zvolena na základě modelu řídicího objektu. V tomto případě složitější řídicí objekty odpovídají složitějším řídicím jednotkám. V našem případě je struktura regulátoru již nastavena - uvažujeme o PID regulátoru. Tato struktura je velmi jednoduchá, takže PID regulátor nemůže vždy dát dobrá kvalita regulace, i když PID regulátory se používají v naprosté většině průmyslových aplikací. Druhy a použití senzorů automatické ovládání režimové parametry technologických procesů chemická výroba. Princip činnosti měřených snímačů, regulátorů teploty, modulárních spínačů. Prostředky ochrany elektrických instalací. práce, přidáno 26.04.2014 Seznámení s fázemi výpočtu nastavení typických regulátorů v jednosmyčkovém systému automatické odezvy. Vlastnosti volby typu průmyslového regulátoru. Metody konstrukce oblasti stability v rovině parametrů ladění regulátoru. práce, přidáno 17.06.2013 Analýza vlastností řídicího objektu, typické regulátory a výběr typu regulátoru. Výpočet optimálních parametrů nastavení regulátoru. Závislost regulačního působení na odchylce regulované hodnoty. Integrální a proporcionální regulátory. semestrální práce, přidáno 2.11.2014 Návrh zařízení, které měří teplotu v místnosti. Volba teplotního čidla, mikrokontroléru a ladicí desky. Studium činnosti vestavěného teplotního senzoru. Vývoj softwaru. Funkční organizace programu. semestrální práce, přidáno 26.12.2013 Návrh modelu elektromotoru s vypočtenými parametry v prostředí Simulink. Simulace chodu motoru s různým zatížením (rušivý moment). Výpočet parametrů a optimálních regulátorů a ukazatelů kvality pro řadu charakteristik. semestrální práce, přidáno 24.06.2012 Výpočet komplexní frekvenční charakteristiky objektu v požadovaném frekvenčním rozsahu. Stanovení meze stability uzavřeného automatický systém nařízení. Hodnocení kvality regulace při použití PI a PID regulátorů a výběr toho nejlepšího. semestrální práce, přidáno 4.12.2014 Urychlovací charakteristika objektu regulace a stanovení parametrů charakterizujících setrvačné vlastnosti objektu. Výpočet nastavení regulátorů podle amplitudově-fázové charakteristiky regulovaného objektu. Výpočet ukazatelů kvality ATS. semestrální práce, přidáno 22.10.2012 Syntéza proporcionálně-integrálně-diferenciálního regulátoru, který poskytuje indikátory přesnosti a kvality regulace pro uzavřený systém. Amplitudo-frekvenční charakteristika, dynamická analýza a přechodný proces nastaveného systému. semestrální práce, přidáno 08.06.2013 Výpočet parametrů ladění PI regulátoru pro objekt druhého řádu. Analytický výpočet a implementace programu v prostředí MatLab, který určuje parametry regulátoru a přechodového děje. Kritéria kvality přechodného procesu uzavřeného systému. laboratorní práce, přidáno 29.09.2016 Klasifikace elektromagnetických závěsů. Sestavení matematického modelu stánku. Softwarová implementace proporcionálně-integrálně-diferenciálního regulátoru. Popis mikrokontroléru ATmega 328 a desky Arduino. Montáž a uvedení stojanu do provozu. PID regulátor je nejjednodušší regulátor, který má efektivní analogové hardwarové implementace, a je proto nejrozšířenější. Pro svou práci vyžaduje nastavení 3 koeficientů pro konkrétní objekt, což umožňuje zvolit proces regulace dle požadavků. Má jednoduchý fyzikální význam a jednoduchý matematický zápis a je široce a často používán v regulátorech teploty, regulátorech průtoku plynu a dalších systémech, kde je požadováno udržovat určitý parametr na dané úrovni s možné přechody mezi různými přednastavenými úrovněmi. Samozřejmě existují složitější regulátory, které umožňují dosáhnout nastavených parametrů přesněji a rychleji a s menšími překmity a také zohledňují nelinearitu či hysterezi řízeného objektu, ale mají větší výpočetní náročnost a jsou náročnější. zřídit. Navzdory své jednoduchosti jak fyzického významu, tak matematického zápisu: V softwarové implementaci PID regulátoru dochází často k chybám, které se vyskytují i u ověřených automatizačních zařízení. Navíc je velmi snadné zkontrolovat kvalitu implementace PID regulátoru. Zvážit nejjednodušší příklad: termostat. K otestování jeho kvality se nejlépe hodí rychlý objekt s nízkou setrvačností a nízkou spotřebou energie. Klasika žánru: obyčejná 100W žárovka s přišroubovaným tenkým termočlánkem (XA). A první věcí ke kontrole PID regulátoru je degradace PID pouze na P-regulátor. To znamená, že integrální a diferenciální koeficient nastavíme na nulu a proporcionální nastavíme na maximum. Zapneme regulátor, zkontrolujeme: aktuální teplota je 22 stupňů, nastavení je 16 stupňů. Lampa nesvítí. Začneme zvyšovat nastavení: 16,1, 16,3, 16,7, 18 ... 19 ... kontrolka svítí. Jak?! Kde?! Zastavujeme - vypnuto. Tak jsme se potkali první klasická chyba implementace PID regulátoru. Malá matematická odbočka: připomeňme si ještě jednou výše naznačený integrální zápis. Realizujeme to programově, to znamená diskrétně. To znamená, že se záviděníhodnou pravidelností měříme vstupní hodnotu, porovnáváme ji s požadovanou hodnotou, počítáme účinek, vydáváme, opakujeme. Je tedy nutné přejít od integrálního tvaru ke schématu konečných rozdílů. Při přechodu se obvykle používá čelní přechod: Použití přímého vzorce bude zaprvé vyžadovat výpočet a uložení integrálu neshod po dlouhou dobu a zadruhé bude vyžadovat velmi přesnou práci s plovoucí desetinnou čárkou (protože integrální koeficient Ki je vždy< 1), либо операции деления (представляя коэффициент в форме 1/Ki) большой разрядности. Всё это требует вычислительных ресурсов, коих в embedded как правило сильно ограничено… Поэтому, вместо реализации прямой схемы, реализуют рекуррентную формулу: Takže zpět k našemu regulátoru. Existuje tedy nastavitelný předmět: žárovka. Pro řízení dodané energie se používá jednoduchý přístup: napájecí zdroj (220V 50Hz) je přiveden přes triak k zátěži. Triak se vypne v okamžiku, kdy půlvlna projde nulou, a zůstane vypnutý, dokud není na řídicí elektrodu přiveden signál. Čím dříve po začátku půlvlny tedy dáme řídící signál, tím více energie z této půlvlny dosáhne řízeného objektu. Správným načasováním linearity oblasti půlvlny od času X do konce půlvlny jsme schopni výstupní výkon od 0 do 100 % s přesností, s jakou jsme vypočítali tabulku linearizace. Takže můžeme výstupní výkon od 0 do 100 %. Ve skutečných objektech je často nemožné vydat 100% energie - například je to plné vyhoření topného tělesa. Proto mají všechna zařízení nastavení minimálního a maximálního výstupního výkonu na objekt. Takže po výpočtu U(n) podle výše uvedeného vzorce je přidáno další omezení výsledku: Důvod je banální: v okamžiku přechodu z diskrétního na konečně-diferenční schéma operaci výpočtu integrálu „ohraničíme“ a v každém kroku přičteme derivaci k akumulovanému součtu U(n-1) . Tím, že jsme na něj uvalili omezení, vlastně vynulujeme celý vypočítaný integrál. (No, ne jak moc resetujeme, jak moc přivedeme do rozsahu 0-100, což v tomto případě není podstatné). Tím odlišíme PID regulátor a diferenciální urychlovač zůstane. Co ve skutečnosti vypadá jako jednoduchý diferenciální regulátor - výkon je dodáván úměrně změně žádané nebo regulované veličiny, a nikoli úměrně rozdílu mezi žádanou hodnotou a regulovanou veličinou. Závěr #1: Výpočet U(n) nelze omezit. Pro omezení výkonu dodávaného do výstupního zařízení by měla být nastavena samostatná proměnná. Nyní, když máme Urnu, pro omezený výkon, znovu nahráváme, pokračujeme v testování. Zatímco čekáme a pomalu si uvědomujeme, že jsme na nějaké jednoznačně narazili "Klasický kloub #2"™ žárovka pomalu vzplane, přejde na 100% výkon a zůstane tak - nemůže vydat 600 stupňů. Znovu se vrátíme k našemu rozdílovému schématu. U(n) = U(n-1) + Kp*(dE + ...) . Zbytkový rozdíl vynásobený koeficientem proporcionality se přičte k aktuální vypočtené hodnotě dopadu. Měli jsme nastavenou hodnotu 60, teplotu 60, tedy nulový nesoulad. Výstupní výkon byl také nulový. A pak najednou, náhle, byla nastavená hodnota zvýšena na 600 stupňů. nesoulad se prudce stal 540 stupňů, vynásobili ho také faktorem proporcionality ... a vyletěli z úložné kapacity U (n). Nesmějte se, použijte matematiku s pevnou řádovou čárkou místo pohyblivé řádové čárky. S rozdílem 540 stupňů a prací přes 1/16, s faktorem proporcionality 20, dostaneme ... 540 * 20 * 16 = 172 800, a pokud máme 16bitové U (n), a dokonce i se znaménkem jedna, pak jsme ve skutečnosti v důsledku výpočtu dostali A300h = -8960. Opachki. Místo velkého plus - hmatatelné takové mínus. Závěr č. 2: Výpočty musí být provedeny se správnou podporou přetečení. Přeteklo? Omezte limitní počet, rozhodně nezabalujte. Takže jsme zvýšili bitovou hloubku U (n), přeložili, zašívali, spouštíme. Žárovka ještě úplně nevychladla, je tam 80 stupňů, nastavení stále stejných 600. Žárovka se rozsvítí ... a zhasne. Rozsvítí se a zhasne. Jak to? Nastavení je 600, žárovka 80 - a udržuje si svých 80 docela dobře! Jak to? Očividně jsme vystoupili Chyba č. 3. A opět lyricko-matematická odbočka. Takže existuje naše rozdílové schéma: U(n) = G(U(n-1), dE(n)) . Ještě jednou: nová hodnota dopadu je součtem minulého dopadu a určitého dopadu v závislosti na rozdílu mezi zbytkem v aktuálním okamžiku a předchozím. Jaký je předchozí okamžik? A jaký je předchozí okamžik předchozího? No, vzpomeňte si na školu. Důkaz indukcí. Pokud je možné sestrojit důkaz pro K+1 za předpokladu, že důkaz pro K je správný, A dokažte samostatně, co platí pro K=0, pak je důkaz pravdivý. Jak tedy vypočítáme U(0)? Běžné řešení: resetujte vše, načtěte požadovanou hodnotu z paměti flash a požadované hodnoty, počkejte na 1 cyklus dotazování a načtěte X(0). Tady je nula připravena, teď pracujeme. A... A ne správně. Proč? Protože opakující se vzorec je odpuzován změnami rezidua. A po inicializaci s nulou a načtení aktuálních hodnot jsme ztratili počáteční podmínky. To je vše - namísto udržování absolutní hodnoty teploty na úrovni rovné absolutní žádané hodnotě, regulátor začne udržovat teplotu rovnou počáteční teplotě plus rozdíl žádané hodnoty. To znamená, že bylo 80 stupňů a nastavení bylo 200, zapnuto zařízení - drží 80. Změněno nastavení na 240 - začalo držet 120. Správná inicializace rozdílového schématu: nastavte _vše_ na nulu. To znamená Závěr č. 3: správně inicializovat podmínky spuštění. Je to v pořádku? Dobře, dobře, dobře ... Ještě jednou ... Nastavíme nastavení na 20. Čekáme na ochlazení ... Vypneme. Zapnout. Takže, krása: proud 20, nastavená hodnota 20. Nastavte skok 600. Pojďme se zahřát. 100, 120 ... nastav nastavení na 20. Vypnul se, šel se ochladit. Čekáme na chvíli (120… 110… 100… 90… 80…) a nastavíme na 100. Pojďme se zahřát… 105 stupňů, vypnuto. Stop. A proč drží 105? U nás nyní funguje pouze poměrná složka. Při správné implementaci z fyzikálního smyslu procesu nemůže oscilační proces udržet nastavení výše, než je nastaveno. přísně níže. A drží o 5 stupňů více, než se požaduje. Je dodržováno Žert #4. Takže si připomeňme, co jsme měli výše: Závěr č. 2: U(n) nelze omezit. A závěr č. 3: v případě přetečení se stejně musíte omezovat. Ano ano. Jinak se „pracovní bod“ posune o omezený moment. Co dělat? Zvýšit hodnost? Tedy pokud je dostatek výpočetního výkonu. Je to nezbytné? Co je vlastně špatného na tom mít U(n) = 9999,99 a ne 29999,99? Obecně jen to, že jsme ztratili 20 000. Ale teď, abychom mohli pracovat, musíme stejně shodit 100 % výkonu, ne? Že jo. To znamená, že s omezením v pluku není problém, pokud se nevzdalujeme od limitu. V případě přetečení je tedy nutné nastavit příznak a při dosažení např. poloviny rozsahu (to znamená, že U (n) po 9999,9 kleslo pod 5000,00) znovu inicializovat obvod. To znamená, vyhoďte historii, řekněte, že n=0 a viz závěr č. 3 výše. Zvídavá mysl si to v případě již uvědomila kompletní schéma, když se všechny tři složky nerovnají nule, čímž vynulujeme iterační proces v procesu, vynulujeme také akumulovaný integrál integrální složky. Vzhledem k tomu, že jsme ale s velkým předstihem resetovali na nulu, stihne se nashromáždit během doby dodatečné výroby zbytku. A není úplně správné shromažďovat integrál na „velkých“ stupních, protože účelem integrální složky je „vybrat“ nesrovnalost, kterou proporcionální složka nemůže samostatně zjistit. Závěr č. 4: pokud bylo z nějakého důvodu U(n) omezeno, obvod by měl být znovu inicializován, jakmile se zdá, že se obvod vrátil do normálu. V příštím čísle: je nutné zavést rozdílové schéma? Detailní implementace přímého diskrétního obvodu s jednoduchými a srozumitelnými nastavitelnými koeficienty, s přímým fyzikálním významem, který snadno vypočítává řídící akci na frekvenci 25Hz na procesoru ADuC847 (rychlý 8bitový řadič, s jádrem 8051), přičemž spoustu času CPU pro jiné procesy. (Obrázky znázorňující vzorce jsou převzaty z článkuOdeslat svou dobrou práci do znalostní báze je jednoduché. Použijte níže uvedený formulář
Podobné dokumenty
kde E(n) = X(n) - X0(n) - tedy velikost nesouladu mezi aktuální a nastavenou hodnotou řízeného parametru.
použití rekurzivního vzorce umožňuje snížit množství výpočtů a bitovou hloubku mezihodnot.
pokud Un< Umin then Un:= Umin; if Un>Umax pak Un:= Umax;
Poté je vypočtený Un požadovaný výstupní výkon v aktuálním okamžiku. Ta-dam! Je to tato implementace, která vytváří chybu popsanou výše.
Zapneme regulátor, zkontrolujeme: aktuální teplota je 22 stupňů, nastavení je 16 stupňů. Lampa nesvítí.
Začneme přidávat nastavení: 16,1, 16,4, 17, 18, 20, 22, 24 (jejda! svítí! hurá!), 28, 30, 40, 60 ... Krása! Funguje!
Sledujeme postup - vyšlo to tak na 60, trochu se to houpe tam a zpět, ale drží. Zdá se, že vše je krásné. Vydechneme, zkontrolujeme ovládání z PC: nastavíme 600 stupňů. A... Světlo zhasne. Jak to? Nastavená hodnota 600, aktuální 60, ale světlo nesvítí?
X(0) = 0, X0(0) = 0. U(0) = 0. E(0)=X(0)-X0(0)=0.
A hned v prvním cyklu výpočtů se náhle objeví požadovaná a aktuální hodnota:
X(1) = 80. X0(1) = 200. U(1) = U(0)+Kp*(E(1)-E(0)) = U(0)+Kp*(X(1)-X0(1)-E(0)) = 0 + 20*(200 - 80 - 0) = 2400
Nyní obvod funguje správně.





