V systémech s tímto způsobem řízení bude v důsledku přítomnosti hystereze a omezeného řídicího signálu skutečná hodnota parametru vždy periodicky kolísat vzhledem k nastavené hodnotě, tj. vždy bude existovat nesoulad. Přesnost regulace je možné mírně zvýšit snížením spínací hystereze, což však vede ke zvýšení spínací frekvence výstupního relé a jejímu poklesu. životní cyklus. Regulátory tohoto typu jsou tedy nevhodné pro úlohy, kde je regulační parametr vysoce dynamický a kde je vyžadováno přesné udržování hodnoty regulovaného parametru. Možná aplikace limitních regulátorů - objekty s velkou setrvačností a nízkými požadavky na přesnost regulace.
PID regulace
Přesnost regulace můžete výrazně zlepšit aplikací zákona PID (zákon o proporcionální-integrované-diferenciální regulaci).
K implementaci zákona PID se používají tři hlavní proměnné:
P – pásmo proporcionality, %;
I – integrační čas, s;
D je doba diferenciace, s.
Ruční ladění PID regulátoru (určení hodnot parametrů P, I, D), který zajišťuje požadovanou kvalitu regulace, je poměrně složité a v praxi málo používané. PID regulátory řady UT/UP poskytují automatické ladění PID parametrů pro konkrétní regulační proces při zachování možnosti ručního nastavení.
Úměrný
V pásmu proporcionality, určeném koeficientem P, se bude řídicí signál měnit úměrně rozdílu mezi žádanou hodnotou a skutečnou hodnotou parametru (nesoulad):
řídicí signál = 100/P E,
kde E je neshoda.
Koeficient úměrnosti (zisk) K je nepřímo úměrný P:
Pásmo proporcionality je definováno s ohledem na nastavenou řídicí žádanou hodnotu a v tomto pásmu se řídící signál mění od 0 do 100 %, tj. pokud se skutečná hodnota a žádaná hodnota rovnají, výstupní signál bude mít hodnotu 50 %.
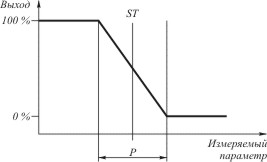
kde P je pásmo proporcionality;
ST - žádaná hodnota regulace.
Například:
rozsah měření 0…1000 °С;
řídicí bod ST = 500 °С;
pásmo proporcionality P = 5 %, což je 50 °C (5 % z 1000 °C);
při hodnotě teploty 475 °C a nižší bude mít řídicí signál hodnotu 100 %; při 525 °C a vyšších - 0 %. V rozsahu 475…525 °C (v pásmu proporcionality) se bude řídicí signál měnit úměrně k hodnotě nesouladu se zesílením K = 100/P = 20.
Snížením hodnoty proporcionálního pásma P se zvýší odezva regulátoru na nesoulad, tj. malá neshoda bude odpovídat větší hodnotě řídicího signálu. Zároveň však v důsledku velkého zesílení nabývá proces oscilačního charakteru kolem požadované hodnoty a nelze dosáhnout přesné regulace. Při nadměrném zvýšení proporcionálního pásma bude regulátor reagovat příliš pomalu na výsledný nesoulad a nebude schopen sledovat dynamiku procesu. Pro kompenzaci těchto nevýhod proporcionálního řízení je zavedena další časová charakteristika - integrální složka.
integrální součást
Je určena integrační časovou konstantou I, je funkcí času a zajišťuje změnu zesílení (posun proporcionálního pásma) za dané časové období.
řídicí signál = 100/P E + 1/I ∫ E dt.
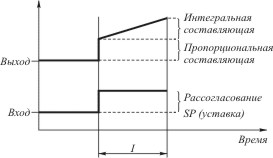
Jak je vidět z obrázku, pokud proporcionální složka regulačního zákona nezajistí snížení nesouladu, pak integrální složka začne postupně zvyšovat zisk v průběhu časového období I. Po určité době I se tento proces opakuje. Pokud je nesoulad malý (nebo rychle klesá), pak se zesílení nezvyšuje a pokud je hodnota parametru rovna zadanému nastavení, nabývá nějaké minimální hodnoty. V tomto ohledu je integrální součást označována jako funkce automatického vypnutí regulace. V případě PID regulace budou skokovou odezvou procesu fluktuace, které se postupně snižují směrem k požadované hodnotě.
Odvozený termín
Mnoho řídicích objektů je dostatečně inerciálních, tj. mají zpoždění v reakci na aplikovanou akci (mrtvá doba) a pokračují v reakci po odstranění řídicí akce (doba zpoždění). PID regulátory na takových objektech budou mít vždy zpoždění se zapnutím/vypnutím řídicího signálu. Pro eliminaci tohoto efektu je zavedena diferenciální složka, která je určena derivační časovou konstantou D, a je zajištěna plná implementace zákona PID řízení. Diferenciální složka je časovou derivací nesouladu, tj. je funkcí rychlosti změny řídicího parametru. V případě, že dojde k nesouladu konstantní hodnotu, diferenciální složka přestane ovlivňovat řídicí signál.
řídící signál = 100/P E + 1/I ∫ E dt + D d/dt E.
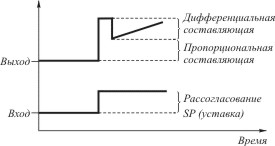
Se zavedením diferenciální složky začne regulátor brát v úvahu mrtvý čas a dobu zpoždění a předem změní řídicí signál. To umožňuje výrazně snížit výkyvy procesu kolem požadované hodnoty a dosáhnout rychlejšího dokončení přechodového jevu.
PID regulátory tedy při generování řídicího signálu berou v úvahu vlastnosti samotného řídicího objektu, tzn. analyzovat nesoulad z hlediska velikosti, trvání a rychlosti změny. Jinými slovy, PID regulátor „předvídá“ reakci regulovaného objektu na řídicí signál a začne měnit regulační akci nikoli při dosažení žádané hodnoty, ale s předstihem.
Při vytváření různých automatizačních zařízení je často úkolem zajistit danou rychlost otáčení hřídele motoru nezávisle na aktuálním zatížení.
Není těžké vidět, že rychlost otáčení hřídele motoru závisí nejen na napětí na motoru, ale také na vnějších neznámých vlivech na motor, jako je proměnná třecí síla, měnící se zatížení, teplota, kvalita mazání, popř. další faktory. Proto je úkol zajistit danou rychlost otáčení hřídele motoru redukován na úkol generovat takové napětí na motoru, které by zajistilo danou rychlost otáčení motoru, nezávisle na vlivu vnějších náhodných faktorů.
Řešení tohoto problému bez teorie automatické ovládání nemožné. Řešení problému spočívá ve výpočtu a implementaci PID regulátor otáček. Specialisté Dean-Soft mají zkušenosti s řešením takových problémů.
PID regulátor zajišťuje danou rychlost aktuátoru (motoru), nezávisle na konstantní nebo pomalu se měnící zátěži, která na něj působí.
PID regulátor je proporcionálně-integrálně-diferenciální regulátor. PID regulátor se skládá z proporcionálního ( K p ), integrální ( K a / s ) a diferenciál ( K d s ) link, každý z nich má svůj vlastní zisk (obr. 1).
Rýže. 1. Strukturní schéma řídicího systému s PID regulátorem.
Tady: s je Laplaceův operátor (někdy označovaný jako p ). Pokud abstrahujeme od Laplaceových transformací, pak záznamy Kp, K a / s A K d s je třeba brát pouze jako označení odpovídajícího odkazu, nikoli jako matematický výraz. A rozhodně byste neměli hledat smysl s , protože, jak již bylo řečeno, je to operátor, nikoli proměnná.
V systému PID skutečná rychlost V(t) motor se měří pomocí senzor.
Na vstupu systému dorazí požadovaná hodnota rychlosti V zadku(t) ve stejných jednotkách jako skutečná rychlost.
Zpětná vazba Adder odečte od signálu referenční rychlosti V zadku (t) signál skutečné rychlosti V(t) a generuje chybový signál e (t) na výstupu:
Chybový signál je odeslán na úměrný, integrální A rozdíl propojení PID regulátoru.
proporcionální odkaz násobí chybový signál e faktorem K p a generuje výstupní signál y p.
integrální odkaz integruje signál e (t) v čase, vynásobí faktorem K a a generuje výstupní signál ya.
diferenciální spojka diferencuje chybový signál s ohledem na čas e (t) a výsledek vynásobí číslem K d a tvarování výstupního signálu y d.
Akumulátor PID regulátoru sečte signály y p(t), ya(t) A y d(t) a generuje výstupní signál y(t):
PWM a vypínač navržený pro přenos vypočteného výstupního signálu do motoru y(t).
Výpočet koeficientů PID regulátoru
Není těžké vidět, že PID regulátor je charakterizován třemi koeficienty K p, K a A K d. Pro výpočet těchto koeficientů je nutné znát parametry řídicího objektu, v tomto případě motoru.
Struktura a parametry řídicího objektu
Z hlediska teorie automatického řízení motor stejnosměrný proud přibližně popsáno: dvěma aperiodickými spoji s elektrickou časovou konstantou T e a mechanickou časovou konstantou T m. Celkový motorický zisk K motor(obr. 2). Ve skutečnosti, strukturální schéma motor je mnohem složitější, ale to pro nás v tomto případě není tak důležité.

Rýže. 2. Strukturní schéma motoru z pohledu teorie automatického řízení.
Funkce přenosu motoru, napsaný v podmínkách Laplaceova operátoru s, následující:
Zisk motoruK motor určuje úměrnost mezi rychlostí otáčení hřídele motoru při volnoběhu a napětím přivedeným na vstup. Jednoduše řečeno, poměr se rovná poměru otáček naprázdno V xx a jmenovité napětí motoru U n.
Napětí na motoru se v mikroprocesorové technice nastavuje v konvenčních jednotkách napětí a rychlost se bere v konvenčních jednotkách rychlosti.
Pokud je pro generování napětí na motoru použito 7bitové PWM (viz níže), pak pro výpočet K motor hodnota jmenovitého napětí je 128 konvenčních napěťových jednotek.
volnoběžné otáčky w xx, specifikované v pasových údajích motoru, by měly být znovu načteny v konvenčních jednotkách rychlosti PROTIxx určeno způsobem implementace snímače rychlosti.
Předpokládejme například, že se k měření rychlosti používá inkrementální enkodér umístěný na hřídeli motoru a má 512 značek na otáčku. Nechť se rychlost v konvenčních jednotkách změří jako počet značek na cyklus výpočtu D t. Výpočtový cyklus získaný vyhodnocením výkonu algoritmu nechť je roven 0,001 sec. Nechte motor běžet na volnoběh w xx= 5000 ot./min.
Převedeme otáčky motoru na senzorové značky, dostaneme: 5000x512 = 2560000 značek / min. Převedeme minuty na cykly výpočtu:
Pokud jsou parametry motoru neznámé, pak se volnoběžné otáčky určí experimentálně. K tomu je při volnoběhu přivedeno maximální napětí na motor a údaje se odečítají ze snímače rychlosti V xx.
Mechanická časová konstanta T m závisí na momentu setrvačnosti hřídele motoru, převodovky, setrvačnosti výkonné zařízení. Obvykle není možné jeho hodnotu vypočítat analyticky. Proto se měří experimentálně.
K tomu je náhle přivedeno maximální napětí na motor při jeho jmenovité zátěži a přechodný proces změny rychlosti je odstraněn. V(t).
Rychlost se odebírá ze snímače rychlosti v diskrétních časech, zaznamenává se do paměti RAM mikroprocesoru a poté se přenáší do osobního počítače. Osobní počítač rekonstruuje graf změny rychlosti V(t)(obr. 3).
 |
Rýže. 3. Přechodový proces ve stejnosměrném motoru.
Podle přechodového grafu je možné určit za prvé otáčky naprázdno V xx a za druhé, doba regulace t p. Doba regulace je určena časem ukončení přechodového procesu (doba, kdy se přechodová křivka liší o méně než 1 % od hodnoty ustáleného stavu).
Zanedbáme-li malý vliv elektrické časové konstanty T e, obvykle o řád menší než mechanická časová konstanta T m, pak lze přechodový proces ve stejnosměrném motoru považovat za aperiodický s konstantou T m.
Je známo, že doba aperiodického přechodového procesu je pětkrát delší než jeho časová konstanta. Ti.:
Pro náš případ tedy dostáváme:
V našem případě doba kontroly t p, soudě podle grafu, se rovná 1,5 sec. Pak mechanická časová konstanta T m= 1,5/5 = 0,3 sec.
Po vynesení grafu přechodového procesu tedy najdeme mechanickou časovou konstantu T m.
Elektrická časová konstantaT e určuje setrvačnost magnetizace kotvy motoru a je rovna poměru indukčnosti kotvy motoru k odporu jejího vinutí:
V praxi je obtížné měřit parametry indukčnosti kotvy a pak mají elektrickou časovou konstantu o řád menší než mechanickou časovou konstantu:
To platí pro většinu motorů.
Výpočet koeficientů PID regulátoru.
Pro výpočet koeficientů PID regulátoru je třeba vyřešit inverzní problém dynamiky. K tomu abstrahujeme od PID regulátoru. Budeme předpokládat, že struktura regulátoru, tzn. jeho přenosová funkce W p(s) , je nám neznámý. K tomu je známa přenosová funkce řídicího objektu Wdv(s)(obr. 4).

Rýže. 4. Výchozí schéma pro výpočet regulátoru pro stejnosměrný motor.
Píšeme přenosovou funkci uzavřeného systému W s (s):
Pojďme určit, jaký přechodný proces v systému by nám vyhovoval? S aperiodickým přechodovým procesem v systému jsme celkem spokojeni. Takto by měl systém reagovat na změny rychlosti a zatížení.
Nechť požadovanou časovou konstantu přechodného děje T bude přibližně stejná T m. Tito. přenosová funkce požadovaného systému w(s) je rovný:
Přirovnejte přenosovou funkci uzavřeného systému s přenosovou funkcí požadovaného systému:
Jednoduchými matematickými transformacemi zde vyjádříme výraz pro přenosovou funkci regulátoru W p(s):
Nahraďte hodnotu W motor(s):
Zavedeme koeficienty:
Dostaneme:
Není těžké vidět, že jsme právě dostali koeficient C 1 , koeficient před integrální spojkou S 2 a koeficientu před rozlišovací spojkou C 3. Tito. dostali jsme klasickou strukturu PID regulátoru s parametry K p=S 1 , K a=C 2 a K d=C 3 :
Implementace PID regulátoru na digitálním mikroprocesoru
Systémy s PID regulátory jsou v současnosti implementovány pouze digitálně a výpočet zákonitostí regulace provádějí levné mikroprocesory řady AVR nebo MCS -51. Všimněte si, že mikroprocesory jsou celočíselné a nepodporují operace s pohyblivou řádovou čárkou. To vyžaduje, aby programátor odpovídajícím způsobem přizpůsobil algoritmy.
V PID systému se rychlost motoru měří pomocí senzoru. Skutečná rychlost se měří v celých podmíněných jednotkách rychlosti. Obvykle se konvenční jednotky rychlosti volí tak, že rychlost v c.u. změněna v rozsahu od -127 do 127 (jeden bajt), v extrémních případech od -15 do 15 (rychlost je brána s rezervou). Ale v žádném případě by počet přírůstků rychlosti neměl být menší než požadovaný počet rychlostí.
Rychlost lze měřit pomocí následujících senzorů:
Zadaná rychlost je zadána do systému ve stejných konvenčních jednotkách jako skutečná rychlost. Nastavená rychlost je obvykle přenášena z řídicího procesoru vyšší úrovně nebo osobního počítače a ukládána do příslušných paměťových buněk mikroprocesoru.
Zpětná vazba Adder odečte od nastavené rychlosti V zadku skutečnou rychlost PROTI a přijímá tzv. chybový signál E:
Vzhledem k tomu, že rychlost V zadku A PROTI jsou celá čísla v rozsahu -127 až 127, je tato operace implementována zcela jednoduše na celočíselném mikroprocesoru. Mělo by být zajištěno, že výsledek. Pokud e<-127 , то e =127, а если e >12 7, pak e = 127.
Signál chyby E vstupuje na vstup PID regulátoru, tzn. na proporcionální vazbě, integrální a diferenciální.
proporcionální odkaz generuje výstupní signál y p vynásobením signálu okamžité chyby faktorem K p.
Součinitel K p obvykle představuje neceločíselnou hodnotu mezi 0,5 a 2. Chcete-li tedy vynásobit celočíselné jednobajtové číslo E pro tento koeficient použijte tabulku K P,i, která se počítá předem:
Pro i =-127...127Čísla v tabulce navíc berou v úvahu omezení na výsledek, který by také měl být jednobajtový, nepřesahující hodnotu 127. To znamená, že pokud je výsledek násobení větší než 127, vezměte jej rovný 127, a pokud je menší než -127, vezměte ho rovno -127 .
Programátoři by měli pochopit, že procesor považuje číslo se znaménkem i jako nepodepsaný index tabulky, takže prvky tabulky s indexy od -128 do -1 budou ve skutečnosti v rozsahu indexů od 128 do 255.
Poté vynásobte koeficientem K p nahrazeno výběrem prvků tabulky K P,i s indexem e:
Tabulka se obvykle vypočítá na osobním počítači a uloží se do paměti mikroprocesoru.
integrální odkaz generuje výstupní signál ya integrací chybového signálu Ečasem a násobením koeficientem K a.
Tady: T- doba od začátku práce.
Digitální mikroprocesor vypočítá integrál postupnou integrací s krokem rovným hodinovému cyklu časovače D t. Pro diskrétní případ je tedy vzorec nahrazen takto:
Zde k je počet cyklů výpočtu, které uplynuly od začátku práce.
Zvažte součet všech Ek. V podstatě je to jen součet všech hodnot e , přijaté v každém cyklu. Tento součet se nazývá integrální součet. S (neplést s s - operátor Laplace). Integrální součet je implementován jako globální proměnná a v každém cyklu se zvyšuje o aktuální hodnotu chybového signálu e:
Při výpočtu PID regulátoru koeficient K a obvykle mezi 0,05 a 2. Výpočtový cyklus D t se pohybuje od 0,0001 do 0,002 sec. Tedy koeficient K a D t je od 5,10-6 do 4,10-3. Protože tento koeficient je mnohem menší než 1, pak vyvstává problém celočíselného násobení jím, protože po vynásobení bude vždy nula.
Abychom tento problém vyřešili, zkusme koeficient vynásobit K a D t na nějaké velké číslo A a vydělte celý součet stejným číslem:

Označte produkt K a D t · A přes koeficient B :
Vyberme číslo A , násobek 256 X na koeficient B byla v rozmezí od 0,05 do 5.
Aby bylo možné vypočítat poměr S/A , rozbalte znaménko čísla S :
implementovat 16bitový výpočet S, Pokud A =256;
implementovat 24bitový výpočet S, Pokud A =256 2 ;
implementovat 32bitový výpočet S, Pokud A =256 3 .
Není těžké implementovat přidání k 16, 24 nebo 32bitovému číslu se znaménkem S podepsané 8bitové číslo E. Nezapomeňte, že pokud E Pokud je kladné, pak rozšíření znaménka vyplní bity vyššího řádu nulami, a pokud je záporné, bity vyššího řádu se vyplní jedničkami. Abychom omezili akumulaci integrálního součtu, implementujeme horní a dolní mez. To se obvykle provádí následovně: pokud se nejvýznamnější bit (znaménko) nerovná předposlednímu bitu, pak by měl být růst integrálního součtu pozastaven.
Připomeňme, že dělení libovolného čísla číslem 256 X je ekvivalentní posunu doprava o X bajtů vpravo. Použijme toto pravidlo. Vezměte pouze vysoký bajt integrálního součtu S : v případě 16bitového počtu je to ekvivalentní posunu o jeden bajt, v případě 24bitového počtu - o dva bajty, v případě 32bitového počtu - o tři bajty.
Tím pádem:
Kde: S senior- vysoký bajt čísla S .
Násobení faktorem B implementovat ve formě tabulky B i, obdobně jako při výpočtu koeficientu poměrné vazby:
diferenciální spojka
Derivační obvod vypočítává výstupní signál y d - e 0 implementujeme ve formě tabulky C i, jako při výpočtu poměrného odkazu:
Akumulátor PID regulátoru
Sčítačka za PID regulátorem přidává okamžité hodnoty signálů y p, ya A y d a generuje výstupní signál y:
Při sčítání byste měli zajistit, aby výsledek byl v rozsahu od -127 do +127, například implementací 16bitového sčítání. Pokud je výsledek větší než 127, měl by být považován za rovný 127, a pokud je menší než -127, pak roven -127.
PWM signál je generován automaticky mikroprocesory AVR. Jeden mikroprocesor je schopen generovat až 3 hardwarové PWM signály. Kromě toho může být signál PWM generován programově pomocí časovače.
Je vhodné vytvořit 7bitové PWM. V tomto případě může být vypínač ovládání zapojen podle schématu na Obr. 4.
Rýže. 4. Způsob připojení hlavního vypínače k výstupu PWM.
Vysoký (znaménkový) bit výsledku y výstup přes kterýkoli I/O pin na jeden ze vstupů vypínače a zbývajících 7 bitů (poslední bit je nastaven na nulu) bez jakékoli konverze lze načíst do registru formace cutoff pro PWM.
Pojďme to dokázat.
Q.E.D.
Přesnost regulace můžete výrazně zlepšit aplikací zákona PID (zákon o proporcionální-integrované-diferenciální regulaci).
K implementaci zákona PID se používají tři hlavní proměnné:
P – pásmo proporcionality, %;
I – integrační čas, s;
D je doba diferenciace, s.
Ruční ladění PID regulátoru (určení hodnot parametrů P, I, D), který zajišťuje požadovanou kvalitu regulace, je poměrně složité a v praxi málo používané. PID regulátory řady UT/UP poskytují automatické ladění PID parametrů pro konkrétní regulační proces při zachování možnosti ručního nastavení.
Úměrný
V pásmu proporcionality, určeném koeficientem P, se bude řídicí signál měnit úměrně rozdílu mezi žádanou hodnotou a skutečnou hodnotou parametru (nesoulad):
řídicí signál = 100/P E,
kde E je neshoda.
Koeficient úměrnosti (zisk) K je nepřímo úměrný P:
Pásmo proporcionality je definováno s ohledem na nastavenou řídicí žádanou hodnotu a v tomto pásmu se řídící signál mění od 0 do 100 %, tj. pokud se skutečná hodnota a žádaná hodnota rovnají, výstupní signál bude mít hodnotu 50 %.
kde P je pásmo proporcionality;
ST - žádaná hodnota regulace.
Například:
rozsah měření 0…1000 °С;
řídicí bod ST = 500 °С;
pásmo proporcionality P = 5 %, což je 50 °C (5 % z 1000 °C);
při hodnotě teploty 475 °C a nižší bude mít řídicí signál hodnotu 100 %; při 525 °C a vyšších - 0 %. V rozsahu 475…525 °C (v pásmu proporcionality) se bude řídicí signál měnit úměrně k hodnotě nesouladu se zesílením K = 100/P = 20.
Snížením hodnoty proporcionálního pásma P se zvýší odezva regulátoru na nesoulad, tj. malá neshoda bude odpovídat větší hodnotě řídicího signálu. Zároveň však v důsledku velkého zesílení nabývá proces oscilačního charakteru kolem požadované hodnoty a nelze dosáhnout přesné regulace. Při nadměrném zvýšení proporcionálního pásma bude regulátor reagovat příliš pomalu na výsledný nesoulad a nebude schopen sledovat dynamiku procesu. Pro kompenzaci těchto nevýhod proporcionálního řízení je zavedena další časová charakteristika - integrální složka.
integrální součást
Je určena integrační časovou konstantou I, je funkcí času a zajišťuje změnu zesílení (posun proporcionálního pásma) za dané časové období.
řídicí signál = 100/P E + 1/I ∫ E dt.
Jak je vidět z obrázku, pokud proporcionální složka regulačního zákona nezajistí snížení nesouladu, pak integrální složka začne postupně zvyšovat zisk v průběhu časového období I. Po určité době I se tento proces opakuje. Pokud je nesoulad malý (nebo rychle klesá), pak se zesílení nezvyšuje a pokud je hodnota parametru rovna zadanému nastavení, nabývá nějaké minimální hodnoty. V tomto ohledu je integrální součást označována jako funkce automatického vypnutí regulace. V případě PID regulace budou skokovou odezvou procesu fluktuace, které se postupně snižují směrem k požadované hodnotě.
Odvozený termín
Mnoho řídicích objektů je dostatečně inerciálních, tj. mají zpoždění v reakci na aplikovanou akci (mrtvá doba) a pokračují v reakci po odstranění řídicí akce (doba zpoždění). PID regulátory na takových objektech budou mít vždy zpoždění se zapnutím/vypnutím řídicího signálu. Pro eliminaci tohoto efektu je zavedena diferenciální složka, která je určena derivační časovou konstantou D, a je zajištěna plná implementace zákona PID řízení. Diferenciální složka je časovou derivací nesouladu, tj. je funkcí rychlosti změny řídicího parametru. V případě, že se nesoulad stane konstantní hodnotou, diferenciální složka přestane ovlivňovat řídicí signál.
řídící signál = 100/P E + 1/I ∫ E dt + D d/dt E.
Se zavedením diferenciální složky začne regulátor brát v úvahu mrtvý čas a dobu zpoždění a předem změní řídicí signál. To umožňuje výrazně snížit výkyvy procesu kolem požadované hodnoty a dosáhnout rychlejšího dokončení přechodového jevu.
PID regulátory tedy při generování řídicího signálu berou v úvahu vlastnosti samotného řídicího objektu, tzn. analyzovat nesoulad z hlediska velikosti, trvání a rychlosti změny. Jinými slovy, PID regulátor „předvídá“ reakci regulovaného objektu na řídicí signál a začne měnit regulační akci nikoli při dosažení žádané hodnoty, ale s předstihem.
5. Přenosová funkce, jejíž odkaz je reprezentován: K (p) \u003d K / Tr





