1.1 Základní pojmy a typy
AUTOMATICKÁ REGULACE
Automatické řízení je soubor akcí zaměřených na realizaci fungování řídicího objektu v souladu s programem a účelem řízení.
Řídicí objekt je chápán jako zařízení, ve kterém je udržována hodnota požadovaných indikátorů procesu. Skutečný stav řídicího objektu je určen jedním nebo více provozními parametry y i , tzv. nastavitelné hodnoty nebo nastavitelné souřadnice a určující akce řídicího systému (obr. 1.1).
Znáte metody, principy a základy automatizace? Aktualizujte proces, ve kterém bude lidská činnost nahrazena činností různých zařízení a zařízení! Seznámíme vás s různými typy ovládání a s tím, jak funguje automatizace.
Dříve se vše ovládalo ručně. To se však s nástupem automatizace změnilo. Dnes rozlišujeme Různé typyřízení. Kontrola je působení na objekt za účelem dosažení daného cíle. Každý se však vždy snažil osvobodit od nezáživných fyzických a duševních aktivit, které proto postupně začaly brát za své. prodejní automaty. Když bylo automatické řízení nahrazeno ručním, mohli bychom začít mluvit o začátku automatizace. Automatické řízení dělíme na přímé a nepřímé.
V v reálných podmínkách je řídicí objekt ovlivňován vnějšími vlivy, které se nazývají poruchy F i. Jako regulované veličiny lze použít v podstatě jakoukoli fyzikální veličinu, která charakterizuje řízený objekt, např. rychlost (lineární a rotační), napětí a proud, lineární a úhlové posuvy atd.
Tři typy řízení a definice regulace
V prvním z nich probíhá proces řízení bez zdroje energie. V současné době se však běžně používá druhý typ správy napájení a je rozebrán v textu níže. Řízení automatizace můžeme sdílet s napájecím zdrojem podle toho, zda je podporován jeho výstup.
Ovládání Ovládání vyšší formyřízení. . Ovládání je způsob ovládání, který nelze nijak ovládat. Regulace v automatizaci spočívá v udržování Fyzické množství na konstantní hodnotě nebo na hodnotě, která se mění podle pravidla. Hodnoty množství se neustále porovnávají s hodnotou požadovanou při kontrole. Případné odchylky jsou eliminovány zásahy do regulačního procesu. Následující obrázek názorně ilustruje rozdíl mezi ovládáním a regulací.
Nastavitelné hodnoty y i určují kontrolní akce U i (t) na vstupu řídicího objektu. Tyto vlivy způsobují změny vnitřního stavu OS a v důsledku toho i řízených provozních parametrů.
Automatické ovládání se obvykle provádí pomocí automatických ovládacích zařízení bez lidského zásahu. Kombinace automatického řídicího zařízení a řídicího objektu, které se vzájemně ovlivňují, tvoří automatický řídicí systém (ACS).
Vyšší formy řízení a umělé inteligence
Diagram ukazuje, jak automatizace funguje. Zdroj: Ivan Schwartz, Základy automatizace. Mezi vyšší formy řízení patří optimální řízení, adaptivní řízení, učení a umělá inteligence. Optimální ovládání je maximálně efektivní nebo naopak velmi rychlé. Systém je schopen dosáhnout požadovaných vlastností s minimální spotřebou energie, vždy hledá co nejpříznivější efekty a zajišťuje tak nejlepší chování systému za daných podmínek.
Hlavní typy automatického řízení jsou:
1) automatické řízení s otevřeným řetězcem vlivů (tvrdé ovládání);
2) automatická regulace;
3) automatické nastavení.
Automatické řídicí systémy s otevřeným řetězcem vlivů se obvykle nazývají otevřené. V těchto systémech se kontrola provádí podle zákonů; nezávisle na skutečném průběhu výroby
Vytvoření funkčního diagramu ATS
Díky adaptivnímu řízení může systém dokonce měnit svou strukturu a parametry. Vždy se přizpůsobí optimálnímu procesu řízení, přizpůsobí se změnám parametrů řízeného objektu. V procesu řízení, který se nazývá učení, je adaptivní systém ještě dokonalejší. Dokáže si zapamatovat přijaté informace a znovu je použít v podobných situacích.
Umělá inteligence je systém s nejvyšším stupněm kontroly. Uměle vytvořený systém dokáže rozpoznat objekty a jevy a dokáže analyzovat jejich vztahy. To vytváří modely prostředí a činí smysluplná rozhodnutí a lze předvídat jejich důsledky. Systém umělé inteligence může objevovat nové modely a dokonce zlepšovat svůj výkon.
proces a je prováděn v otevřené smyčce za účelem získání určitého konečného výsledku (obr. 1.2, a).
Těžký úkol na vstupu systému přes řídicí zařízení CU a výkonné zařízení(zesilovač) DUT působí na řídicí objekt operačního zesilovače, na jehož výstupu je nastavena hodnota X výstup odpovídající tomuto úkolu X v .
Principy činnosti řídicího systému na řízeném systému
Existuje několik způsobů, jak implementovat automatické řízení. Logické, spojité, diskrétní a fuzzy řízení se od sebe liší principem činnosti řídicího systému na řízeném systému. Jaké jsou vlastnosti jednotlivých typů jízdy?
K tomu dochází v důsledku nasazení počítačů jako regulátoru pro řízení počítačů, které nedokážou zpracovat spojitý signál, je převedeno na diskrétní spojení mezi vstupy a výstupy, protože vztah mezi sekvencí pulsů čtených v časové posloupnosti periody vzorkování Rychlý řízený proces zkracuje dobu vzorkování.
- Řízení používá dvouhodnotové proměnné.
- Vždy jsou jen dvě možnosti.
- Množství jsou vyjádřena jako hodnoty 1 a 0.
- Vztahy mezi proměnnými se nazývají logické funkce.
- Akce akce je trvale nastavena.
- Množství se v průběhu času neustále mění.
- Vytváří souvislou vazbu mezi vstupy a výstupy.
V takových systémech není průběh procesu a výstupní řízená hodnota korigována (neřízena), proto se může odchýlit od zadaného režimu. Řízení používané v takových systémech se nazývá řízení s otevřenou smyčkou.
ACS s otevřeným řetězcem vlivů se používají k zajištění určité posloupnosti provozu různých prvků automatických zařízení. Ve složitějších případech lze provést programové řízení procesu s otevřeným cyklem vlivů. Příkladem je řídicí systém pro startování a brzdění motorů.
Skutečnost, že řídicí funkce jsou v tomto případě počítány digitálně, je důvodem k diskretizaci při provozu systému. Samotný pojem diskrétní systém, na rozdíl od spojitého systému, znamená, že hodnoty zahrnuté v procesu jsou ve formě sledu impulsů, což odpovídá zobrazení funkce pouze v konkrétních a v zásadě stejných časových intervalech. Dalším typem vzorkování, který se také vyskytuje v digitálních řídicích systémech, je kvantování hodnoty signálu.
V reálných systémech je nejdůležitějším důvodem pro výskyt minimálních hodnot změn kromě délky slova použitého v mikrokontroléru přesnost zpracování získaná v analogově-digitálních převodnících. Obecné schéma diskrétní řídicí systém je znázorněn na obrázku. Blok regulátoru je v tomto řešení reprezentován pomocí řídicího algoritmu obsaženého v programu mikrokontroléru. Měřená veličina - která tvoří zpětnovazební signál - se do mikrokontroléru zadává pouze v tzv. vzorkovacích okamžicích, opakujících se s periodou.
V systémech řízení s otevřenou smyčkou se řízení provádí podle hlavní akce, která v obecný případ může představovat příkazy programu.
Tento princip spočívá v tom, že za účelem snížení odchylky regulované veličiny od nastavené hodnoty, která se objevuje v důsledku setrvačnosti objektu systému, je regulační akce tvořena v souladu s touto akcí a charakteristikami regulačního objektu. (obr. 1.2, a). 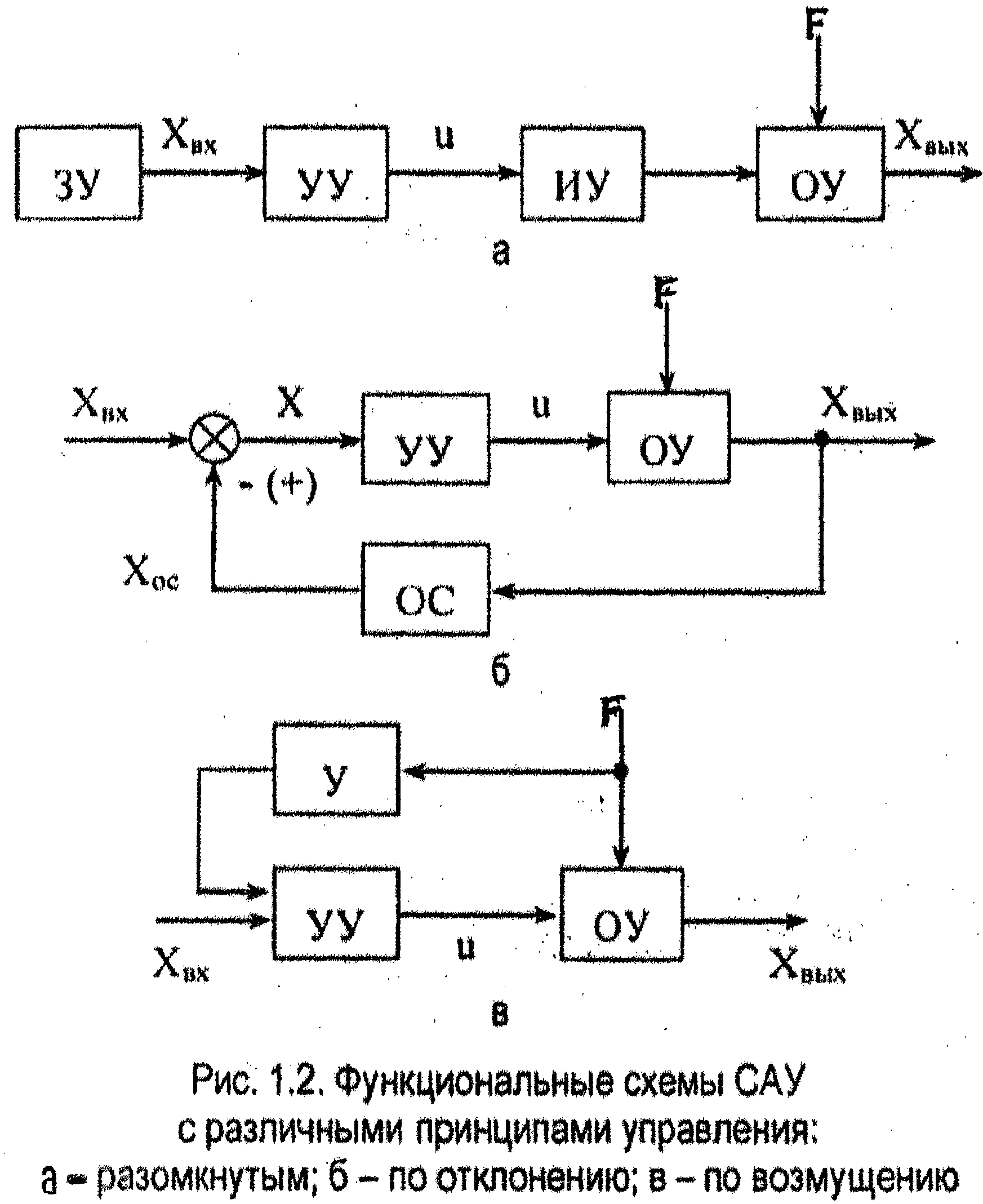
Výsledek výpočtu řídicího algoritmu je rovněž zadán se vzorkovací frekvencí, kde je buď použit v číselné podobě pro řízení výkonného systému, nebo vyžaduje převod na analogovou hodnotu. Diskrétní digitální obvody nahrazují analogové systémy. Digitální systém zaručuje stálost regulačních parametrů v čase a při změnách teploty a také snadnost jejich změny, i když je zařízení ovládáno. V průběhu práce je také přijatelné měnit strukturu systému, což značně zvyšuje flexibilitu řízení.
Řídicí zařízení převádí a zesiluje hlavní akci a generuje řídicí akci u(t).
Řídicí akce z výstupu řídicí jednotky vstupuje do řídicího objektu řídicí jednotky a snaží se změnit řízenou hodnotu X výstup v souladu s hnací silou.
Takové řízení se nazývá rigidní, protože nebere v úvahu skutečné hodnoty řízené veličiny a rušivé vlivy (parametry ACS jsou považovány za konstantní).
Obecně platí, že digitální regulátory jsou mnohem schopnější používat moderní metody řízení, s přihlédnutím k poměrně složitým matematickým operacím. Optimalizační postupy používané v digitálních řídicích systémech mohou brát v úvahu složitější kritéria, jako jsou integrální kritéria odvozená z moderních stavových řídicích struktur. Z důvodu snadné změny parametrů během provozu systému jsou vytvořeny regulátory, které mají vlastnost samočinného ladění na parametry konkrétního objektu na základě měření automaticky prováděných při spouštění.
ZÁKLADNÍ PRINCIPY ŘÍZENÍ
V závislosti na způsobech formování řídicí akce se rozlišují následující řídicí principy:
Princip kontroly rušení,
princip kontroly odchylek,
Princip kombinovaného řízení.
PRINCIP OVLÁDÁNÍ RUŠENÍ
Snížení nebo odstranění odchylky regulované veličiny od požadované hodnoty, způsobené vlivem různých poruch v otevřených systémech, lze provést aplikací principu regulace poruch, popsaným níže. Funkční schéma regulace poruchy je uvedeno na obr. 1.2, c. Obr. Principem regulace poruch je, že za účelem snížení nebo odstranění odchylky regulované veličiny X výstup od nastavené hodnoty se měří hlavní rušivý efekt F a je převedena na řídicí akci u(t) aplikovanou na vstup systému za účelem kompenzace odchylky regulované proměnné způsobené poruchou. Proto je v takových systémech řídící akce funkcí rušivé akce.
v systémech s principem řízení poruchou pro vytvoření řídící akce u(t) využívá se přímá informace o rušivém účinku. Proto je v těchto systémech možné plně kompenzovat vliv rušivého působení na regulovanou hodnotu X výstup . Míra kompenzace vlivu rušivého vlivu závisí na přesnosti měření rušivého vlivu a charakteristice operačního zesilovače.
Výhodou ACS s principem regulace rušení je, že umožňují plně kompenzovat rušivý efekt. Takové automatické řídicí systémy jsou s otevřenou smyčkou, proto, jako v jakémkoliv systému s otevřenou smyčkou, zde není žádný problém se stabilitou.
Pokud je v systému více rušivých vlivů, lze je kompenzovat všechny samostatně stejným způsobem, pokud je možné je měřit. To však komplikuje systém. V praxi jsou kompenzovány pouze rušivé vlivy, které nejostřeji ovlivňují regulovanou hodnotu a způsobují její výrazné odchylky od požadované hodnoty. Takové poruchy se nazývají základní. Drobné poruchy se nazývají takové poruchy, které způsobují pouze malé odchylky regulované hodnoty od nastavené hodnoty.
Nevýhodou takových ACS je, že eliminují vliv pouze hlavních poruch. Kromě toho se přesnost regulace a kompenzace sníží, když se změní charakteristiky operačního zesilovače.
Princip řízení poruchy se používá v systémech navržených tak, aby udržovaly konstantní regulovanou veličinu.
PRINCIP ŘÍZENÍ PRŮMYSLU
Automatická regulace se vyznačuje tím, že regulační funkce jsou závislé na skutečném průběhu výroby procesu, aby byl zachován požadovaný výkon tento proces. Kontrola a informace o skutečných hodnotách ukazatelů tohoto procesu se provádějí pomocí zpětné vazby.
V obecném případě může být takový automatický řídicí systém znázorněn na Obr. 1,2, b. Systém využívá řízení v uzavřené smyčce (princip zpětné vazby nebo regulace odchylky). Regulační odchylka je rozdíl mezi skutečnou naměřenou hodnotou a nastavenou hodnotou. Vzájemný rozdíl mezi požadovanou a skutečnou hodnotou se nazývá regulační chyba. Řídicím zařízením se rozumí technické zařízení, s jehož pomocí je automaticky ovládán řídicí objekt.
Kontrolovaná hodnota X výstup určeno vlivem jízdy X v = X h na vstupu systému, tj. vliv vnesený do systému a určující nezbytný zákon změny řízené veličiny. Na vstupu systému do srovnávacího prvku je kromě master akce přiváděna skutečná hodnota regulované veličiny přes zpětnovazební obvod. Na výstupu srovnávacího prvku, tzn. na vstupu řídicí jednotky CU se objeví odchylka nebo regulační akce
![]() ,
,
který zajišťuje změnu řízené hodnoty podle daného zákona.
Ovládací zařízení v závislosti na velikosti a znaménku zrušení generuje regulační akci A. Princip uzavřeného řízení tedy zohledňuje nejen úkol, ale také skutečný stav řídicího objektu a existující poruchy. Proto je tento princip nejuniverzálnější a umožňuje úspěšně řešit problémy řízení i přes neurčitost objektu řízení a povahu poruch.
Třída takových automatických systémů, postavená na principu uzavřeného řízení, se nazývá automatické řídicí systémy (ACS). Univerzálnost takových systémů umožňuje jejich velmi široké použití v technice a přírodě.
Zpětná vazba v uzavřených systémech automatického řízení slouží k utváření statických a dynamických charakteristik systému. Tyto charakteristiky jsou dány účelem automatického řídicího systému a požadavky, které na něj klade technologický postup. Zpětná vazba řídí průběh procesu a v případě jeho odchylky od zadané jsou na vstup systému nebo na vstup skupiny prvků pokrytých touto zpětnou vazbou přenášeny opravné signály.
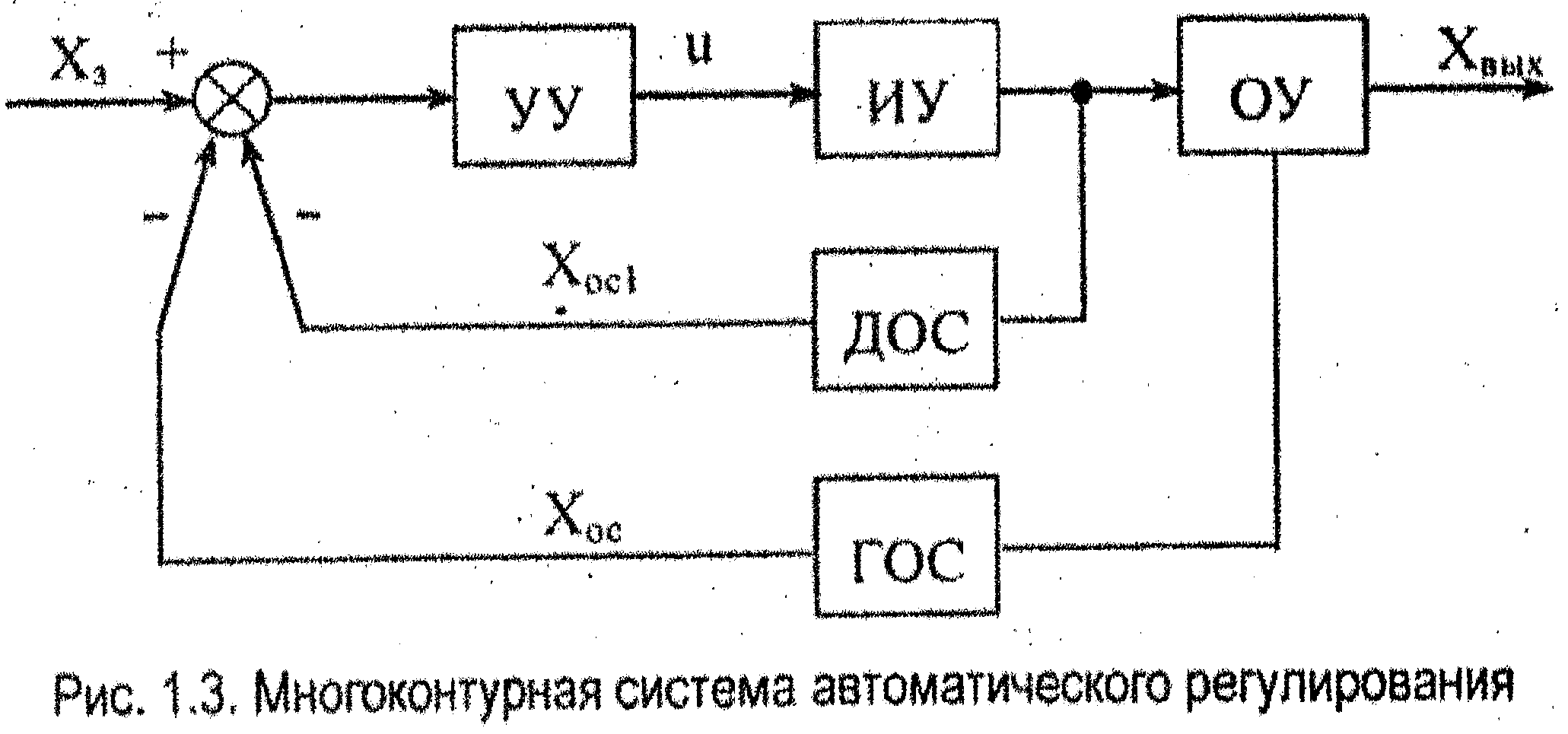
ACS musí mít alespoň jednu zpětnou vazbu, která slouží k porovnání skutečných a nastavených hodnot regulované veličiny. Taková zpětná vazba se nazývá hlavní. Propojuje výstup systému s jeho vstupem a pokrývá všechny hlavní prvky. Systémy, které mají jednu hlavní zpětnou vazbu (GOS), se nazývají single-loop. Některé ACS, kromě hlavních zpětných vazeb (GOS), jejichž počet je určen počtem (GOS) řízených proměnných, mohou mít několik dalších (lokálních). Dodatečná zpětná vazba (DOS) propojuje výstup jednoho nebo více prvků systému. ACS, které kromě hlavní mají jednu nebo více přídavných zpětných vazeb, se nazývají vícesmyčkové (obr. 1.3).
Podle charakteru přenášeného nárazu se zpětné vazby dělí na tuhé a pružné. Pevné zpětné vazby fungují jak v ustáleném stavu, tak v přechodových režimech. Flexibilní zpětné vazby fungují pouze v přechodných režimech. Prostředkem pro realizaci tvrdé zpětné vazby jsou různá měřicí zařízení - čidla, která přenášejí signál do porovnávacího uzlu. Prostředky implementace flexibilních zpětných vazeb jsou diferenciační a integrační zařízení.
Podle vlivu na systém se zpětné vazby dělí na pozitivní a negativní. Pozitivní, pokud se řídicí signál na vstupu zvyšuje se zvýšením výstupního signálu, a negativní, pokud se řídicí signál na vstupu snižuje se zvýšením výstupního signálu.
Nevýhody poruchově řízených systémů lze eliminovat použitím kombinovaných řídících systémů, ve kterých je poruchové řízení kombinováno s řízením odchylky. V tomto případě je vyloučen vliv hlavního rušení na proces řízení. Navíc díky přítomnosti zpětné vazby na řízenou hodnotu , účinek drobných poruch je omezený. Někdy se tyto systémy nazývají otevřené-uzavřené. Mají poměrně vysokou přesnost udržení dané kontrolované hodnoty.
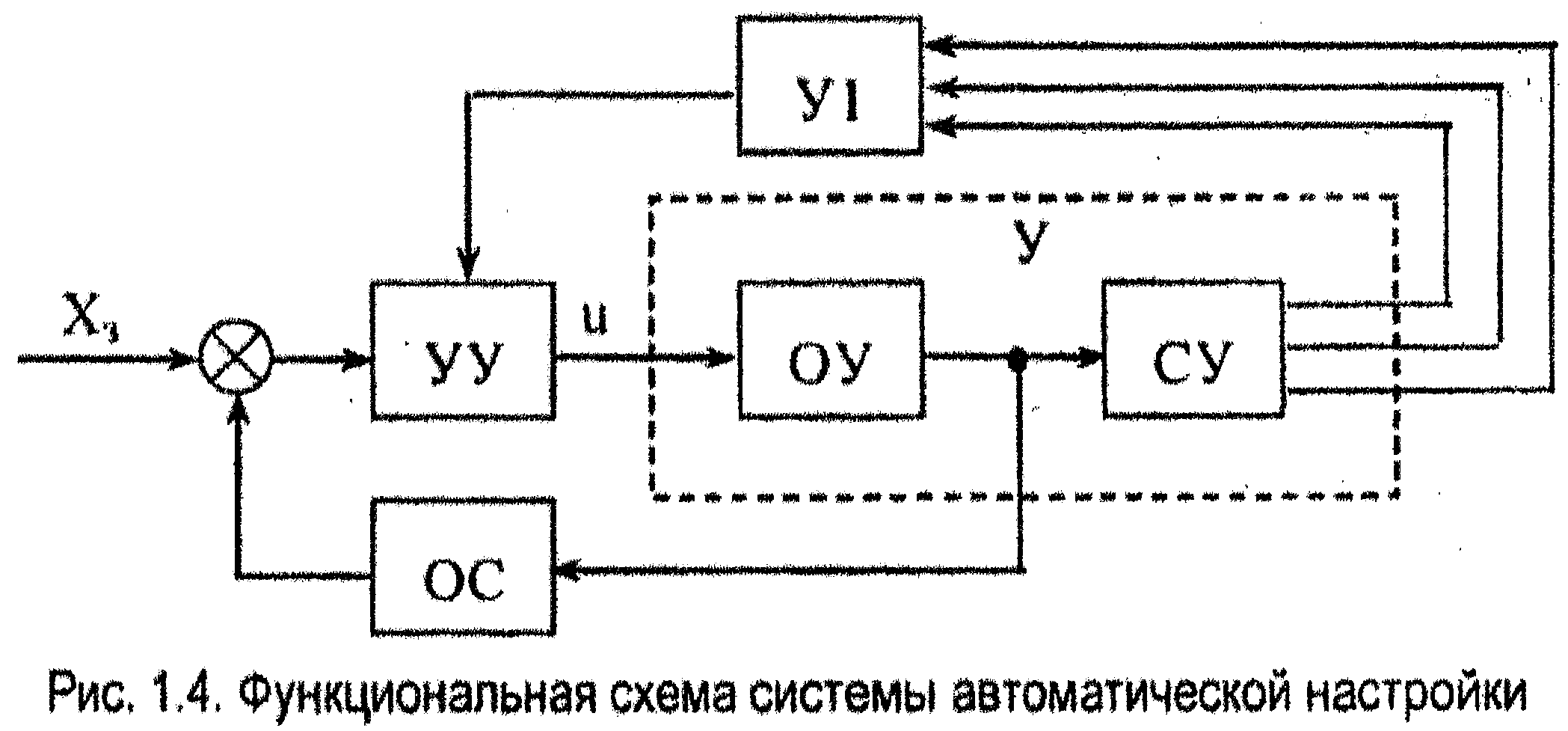
Funkční schéma řídicího systému, které zajišťuje nastavení a výběr požadovaného řídicího algoritmu v závislosti na změně provozních podmínek a parametrů řídicího objektu, je na obr. 1.4.
| Obsah | 2 | |
| Úvod | 3 | |
| 1. | společnou část | |
| 1.1. | Základní pojmy | 6 |
| 1.2. | Popis původního schématu automatického ovládání | 9 |
| 1.3. | Vytvoření funkčního diagramu ACS | 13 |
| 2. | Sídelní část | |
| 2.1. | Parametrická syntéza a analýza jednosmyčkového ACS | 14 |
| 2.1.1. | Vyhodnocení možnosti statické kontroly | 15 |
| 2.1.2. | Vyhodnocení možnosti astatické kontroly | 20 |
| 2.1.3. | Studie kvality jednosmyčkového ATS | 22 |
| 3. | Vývoj regulační smyčky s daným parametrem | 25 |
| Závěr | 27 | |
| Bibliografie | 28 |
Úvod
Moderní teorie automatického řízení je hlavní částí teorie řízení. Automatický řídicí systém se skládá z nastavitelného objektu a ovládacích prvků, které působí na objekt při změně jedné nebo více nastavitelných proměnných. Vlivem vstupních signálů (regulačních nebo poruchových) se regulované veličiny mění. Účelem regulace je vytvořit takové zákony, při kterých by se výstupní regulované veličiny jen málo lišily od požadovaných hodnot. Řešení tohoto problému je v mnoha případech komplikováno přítomností náhodných poruch (šumů). V tomto případě je nutné zvolit takový zákon řízení, při kterém by řídicí signály procházely systémem s nízkými zkresleními a šumové signály by se prakticky nepřenášely.
Teorie automatického řízení ušla ve svém vývoji dlouhou cestu. V počáteční fázi byly vytvořeny metody pro analýzu stability, kvality a přesnosti regulace spojité lineární systémy. Dále pak metody analýzy diskrétních a diskrétních kontinuální systémy. Lze poznamenat, že metody pro výpočet spojitých systémů jsou založeny na frekvenčních metodách a výpočet diskrétních a diskrétně spojitých systémů je založen na z-transformačních metodách.
V současné době jsou vyvíjeny metody pro analýzu nelineárních systémů automatického řízení. Porušení principu superpozice v nelineárních systémech, přítomnost řady střídavých (v závislosti na dopadu) režimů stabilních, nestabilních pohybů a vlastních oscilací komplikuje jejich analýzu. Ještě větší potíže naráží konstruktér při výpočtu extrémních a samonastavitelných řídicích systémů.
Jak teorie automatického řízení, tak teorie řízení jsou ve vědě zahrnuty pod obecným názvem „technická kybernetika“, který se nyní výrazně rozvinul. Technická kybernetika studuje obecné zákonitosti komplexních dynamických řídicích systémů pro technologické a výrobní procesy. Technická kybernetika, automatické řízení a automatická regulace se rozvíjejí ve dvou hlavních směrech: první je spojen s neustálým pokrokem a zdokonalováním konstrukce prvků a technologie jejich výroby; druhý - s co nejracionálnějším využitím těchto prvků nebo jejich skupin, což je úkolem navrhování systémů.
Návrh systémů automatického řízení lze provést dvěma způsoby: metodou analýzy, kdy se s předem zvolenou strukturou systému (výpočtem nebo modelováním) určují jeho parametry;
metoda syntézy, kdy se dle požadavků okamžitě vybere systém
jeho nejlepší struktura a parametry. Obě tyto metody jsou široce rozšířené praktické využití a proto jsou plně popsány v této knize.
Stanovení parametrů systému, když je známa jeho struktura a požadavky na celý systém jako celek, odkazuje na problém syntézy. Řešení tohoto problému s lineárním řídicím objektem lze nalézt například pomocí frekvenčních metod, metody root locus nebo studiem trajektorií kořenů charakteristické rovnice uzavřeného systému. Výběr korekčního zařízení syntézou ve třídě zlomkové racionální funkce komplexní proměnnou lze provést pomocí grafu analytické metody. Stejné metody umožňují syntetizovat korekční zařízení, která potlačují samooscilující a nestabilní periodické režimy v nelineárních systémech.
Metody syntézy byly dále rozvíjeny na základě principů maximálního a dynamického programování, kdy je stanoven optimální zákon řízení z pohledu daného kvalitativního kritéria, které poskytuje horní hranici kvality systému, která musí být usiloval při jeho navrhování. Řešení tohoto problému však není prakticky vždy možné vzhledem ke složitosti matematického popisu fyzikálních procesů v systému, nemožnosti řešení samotného optimalizačního problému a obtížím při technické realizaci nalezeného nelineárního zákona řízení. Je třeba poznamenat, že implementace složitých regulačních zákonů je možná pouze tehdy, když je digitální počítač zapojen do systémové smyčky. Vytváření extrémních a samonastavitelných systémů je také spojeno s používáním analogových nebo digitálních počítačů.
Tvorba automatických řídicích systémů se zpravidla provádí na základě analytických metod analýzy nebo syntézy. V této fázi návrhu řídicích systémů je na základě přijatých předpokladů sestaven matematický model systému a vybrána jeho předběžná struktura. V závislosti na typu modelu (lineární nebo nelineární) se volí metoda výpočtu pro stanovení parametrů, které poskytují stanovené ukazatele stability, přesnosti a kvality. Poté je matematický model upřesněn a pomocí prostředků matematické modelování určit dynamické procesy v systému. Působením různých vstupních signálů se odebírají frekvenční charakteristiky a porovnávají se s vypočítanými. Poté jsou konečně stanoveny meze stability systému ve fázi a modulu a jsou nalezeny hlavní ukazatele kvality.
Dále nastavení typických ovládacích akcí na modelu; odstranit charakteristiky přesnosti. Na základě matematického modelování jsou vypracovány technické požadavky na vybavení systému. Z vyrobeného zařízení se sestaví regulátor a přenese se do polopřirozeného modelování, ve kterém je objekt řízení shromážděn ve formě matematického modelu.
Podle charakteristik získaných jako výsledek HIL modelování se rozhoduje o vhodnosti regulátoru pro práci s reálným objektem regulace. Konečný výběr parametrů regulátoru a jeho nastavení se provádí v přírodních podmínkách během experimentálního vývoje řídicího systému.
Rozvoj teorie automatického řízení na základě stavových rovnic a z-transformací, princip maxima a metoda dynamického programování zdokonaluje způsob navrhování řídicích systémů a umožňuje vytvářet vysoce efektivní automatické systémy pro většinu různá průmyslová odvětví Národní ekonomika. Takto získané automatické řídicí systémy zajišťují vysokou kvalitu výrobků, snižují jejich cenu a zvyšují produktivitu práce.
1. Obecná část.
1.1. Základní pojmy
Konverze systémových vstupů (kontrolní akce) do výstupního signálu (nastavitelná hodnota) určuje zákon změny regulované hodnoty. Realizace požadovaného v důsledku toho je uplatňován zákon formace řídicí proměnné, které ovlivňují řízený systém. Zákony změny regulované hodnoty v čase mohou být různé; matematicky jsou popsány provozovatel systému. Tento operátor může realizovat proporcionální závislost výstupního signálu na vstupu, vztah ve formě derivace nebo integrálu apod. V obecnějším případě může být tento operátor i nelineární.
Je třeba poznamenat, že zákony změny řízených hodnot ve strojích a jednotkách jsou porušovány pod vlivem vnějších a někdy vnitřních vlivů, nazývaných poruchy. (nebo rušivé vlivy). Z definice těchto vlivů je vidět, že automatický řídicí systém by měl co nejpřesněji reprodukovat řídicí akci a co nejméně reagovat na rušivou akci.
Tam jsou tři různé principy konstrukce řídicích systémů, které zajistí implementaci požadovaného zákona změny regulované veličiny: otevřená smyčka, uzavřená smyčka, kombinovaná smyčka regulace (zavřeno-otevřeno). Principem otevřeného cyklu je zajistit požadovaný zákon změny regulované veličiny přímo převodem regulační akce. Princip uzavřeného cyklu je charakterizován porovnáním regulačního působení se skutečnou změnou regulované veličiny vlivem aplikace zpětná vazba a srovnávací prvek. Chybový signál vyplývající z porovnání by neměl překročit určitou předem stanovenou hodnotu. Díky tomu je v uzavřených systémech zajištěn požadovaný zákon změny regulované veličiny. Kombinovaný princip spočívá v kombinaci uzavřené a otevřené smyčky v jednom systému.
Automatické ovládání nazýván proces, ve kterém
operace jsou prováděny systémem, který funguje bez lidského zásahu v souladu s předem stanoveným algoritmem.
Automatický systém s uzavřeným okruhem vlivu, ve kterém je regulační (regulační) působení generováno jako výsledek porovnávání skutečné hodnoty řízené (nastavitelné) veličiny s její danou (předepsanou) hodnotou, je tzv. ASR.
Výrobní proces- soubor vzájemně souvisejících pracovních a technologických procesů, při jejichž realizaci dochází k přeměně surovin a polotovarů na hotové výrobky.
Automatický jsou zařízení, která ovládají různé procesy a ovládat je bez přímého lidského zásahu.
Předmět nebo proces, který má být studován, se nazývá objekt, a všechny okolní objekty, které s nimi interagují - vnější prostředí.
Systém- soubor prvků nebo zařízení, které jsou ve vzájemných vztazích a souvislostech a tvoří určitou celistvost (jednotu).
Ovládací objekt- soubor technologických zařízení (stroje, nástroje, mechanizace), které tento proces provádějí z hlediska řízení.
Kontrolní provoz- zajišťuje ve správný čas začátek, posloupnost a ukončení pracovních operací, alokuje zdroje potřebné k jejich realizaci.
Pod řízení rozumět procesu organizování takového účelového dopadu na kontrolní objekt, v jehož důsledku tento přechází do požadovaného (účelového) stavu.
Parametry výrobního procesu nebo procesu nebo procesního objektu, které musí být neustále udržovány nebo měněny podle určitého zákona, se nazývají kontrolované množství.
Volá se hodnota řízené veličiny, která by podle zadání měla být v daném čase daná hodnota regulované veličiny (regulovaný parametr).
Je volán diagram zobrazující posloupnost procesů v zařízení nebo systému strukturální schéma.
Odkaz- prvek obsažený v ACS, ve kterém je vstupní parametr určitým způsobem převeden na výstupní parametr (je schematicky znázorněn jako blok, ale neodráží vlastnosti jeho návrhu).
Informace je vždy spojena s hmotným nosičem nějaké fyzikální veličiny. V technické systémy takovým nosičům se říká nosiče signálu(například elektrická napětí a proud, tlak, mechanický pohyb atd.), které lze měnit v souladu s přenášenými informacemi.
1.2. Popis původního schématu automatického ovládání.
Jelikož je regulovaný objekt prvkem nebo článkem ACP, závisí vlastnosti ACP především na vlastnostech regulovaného objektu. Pro vytvoření funkčního ACP, který poskytuje požadovanou kvalitu regulace, je proto nutné především znát vlastnosti regulovaného objektu (spastické a dynamické).
Předmětem regulace laboratorního stánku je objekt s rozloženými parametry, od r regulovaná hodnota (teplota) není stejná v různých bodech objektu jak v rovnovážném stavu, tak v přechodovém režimu.
Pro zvýšení setrvačnosti předmětu, která by měla být desetkrát větší, než jaká je u tohoto předmětu naměřena čidlem, je opatřena kovová miska naplněná třískami, ve které je umístěn teplotní senzor. To umožňuje zvýšit tepelný objem objektu.
Požadovaná teplota (referenční) je nastavena zařízením na vstupu regulátoru-nastavení (t e).
Rušení
Rýže. 1. Regulační schéma.
Skutečná teplota je zařízením t f převedena na signál. Označením signálů na výstupu těchto zařízení podobnými písmeny vyjádříme skutečnou odchylku od požadovaného ve tvaru signálu: ∆t = t e - t f; nazývaná odchylka nebo nesoulad. Regulátor převádí ∆t podle určitého regulačního zákona a zapíná akční člen. V našem případě je úkolem regulátoru likvidita odchylek ∆t způsobených působením poruch B, tzn. různá zatížení řídicích objektů (změny okolní teploty, změny polohy brány atd.).
Chyba ∆t může také nastat v důsledku změny t e, ale protože se jedná o funkci předem známou, lze chybu také předem vypočítat a kompenzovat. Takový systém se nazývá systém řízení programu nebo jednoduše ACS.
Stojan poskytuje dvoupolohovou regulaci. V tomto případě je nutné otevřít klapku, aby bylo elektrické topné těleso neustále profukováno vzduchem. Teplota je řízena zapínáním nebo vypínáním topného tělesa pomocí reléového článku.
Pro zjištění dynamických vlastností objektu je ve stojanu instalováno samozáznamové zařízení, které zaznamenává teplotní změny v objektu a fixuje je na pásku s mapou.
Každý technologický celek, který je předmětem regulace OR, pracuje v ustáleném stavu, pokud je v něm plně dodržována materiálová a energetická bilance. Hlavní parametr charakterizující podmínky pro průběh technologického procesu (v našem objektu je to teplota) zůstává v ustáleném stavu nezměněn.
Závislost výstupní hodnoty na vstupní hodnotě v ustáleném stavu se nazývá statická charakteristika OR. Statické charakteristiky mohou být jak lineární, s různými koeficienty sklonu, tak nelineární, zatímco většina reálných objektů obecně má nelineární.
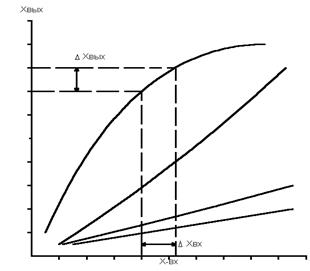
Obr 1.1. Statické charakteristiky OR.
Tyto vlastnosti OR umožňují posoudit míru propojení mezi různými vstupními a výstupními hodnotami objektu.
Statické charakteristiky se zjišťují výpočtem nebo experimentálně.
Dynamická charakteristika regulovaného objektu se nazývá závislost výstupní hodnoty na vstupní hodnotě v přechodovém režimu.
Protože ke změnám výstupní hodnoty RR při různých poruchách může docházet různými způsoby, obvykle se ke studiu dynamických charakteristik objektu používají typické vnější vlivy.
Teplotní křivka zrychlení ACS (obr. 1.2.) udává dynamické vlastnosti OR.
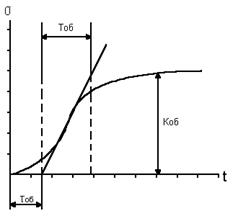
Obr 1.2. Křivka zrychlení
Z obrázku je patrné, že objekt má schopnost postupně zastavit odchylku výstupní hodnoty od výchozí hodnoty a znovu se obnoví rovnovážný stav, tzn. objekt má vlastnost samozarovnání. Takové objekty se nazývají statické.
Objekt má zpoždění T asi a od Není významná a v následujícím bude opomíjena.
Časová konstanta objektu T about je podmíněný čas, během kterého by se výstupní hodnota změnila z počáteční hodnoty na novou hodnotu ustáleného stavu, pokud by tato změna nastala rychlostí, která je konstantní a maximální pro daný přechodový jev. Časová konstanta charakterizuje setrvačnost objektu, která je chápána jako jeho schopnost pomalu akumulovat a spotřebovávat hmotu a energii, což je možné díky přítomnosti odporů a kapacit v OR, které brání jejich vstupu a výstupu.
Přenosový koeficient K o OR je změna výstupní hodnoty objektu během přechodu z počátečního do nového do ustáleného stavu, vztažená k jediné perturbaci na vstupu.
Jediná porucha je považována za jednoprocentní změnu vstupní hodnoty objektu (posunutí regulačního orgánu).
Tím pádem:

Kde x o je hodnota výstupní veličiny v počátečním ustáleném stavu; X (∞)– také, ale pro nový ustálený stav; ∆Х v je velikost zavedené poruchy; % zdvihu regulátoru.
1.3. Vytvoření funkčního diagramu ACS.
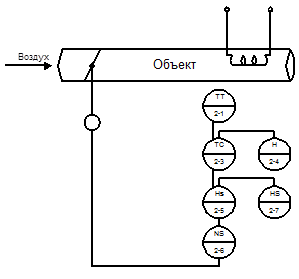
Obrázek 2. Třípolohová regulační smyčka.
Předmět regulace je ve svých vlastnostech statický se samonastavováním s přenosovým zpožděním, což přispělo k volbě proporcionálně-integrálního regulátoru.
Okruh zahrnuje měření teploty chladící kapaliny a porovnávání s úlohou, regulátor přes HS - ruční řídicí jednotku, zapíná kontakt "více" nebo "méně" bezkontaktní startér NS, který zase ovládá akční člen, tzn. přívod vzduchu do chladicí kapaliny.
Při dvoupolohové regulaci reguluje reléový prvek zahrnutí chladicí kapaliny.
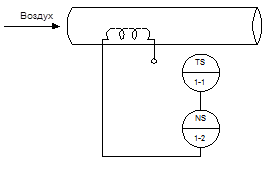
Obrázek 3. Dvoupolohová regulační smyčka.
Po dosažení určité teploty startér vypne napájení elektrického topného tělesa. Měření a regulace teploty se provádí pomocí dynamometrického čidla - teplotního relé.
2. Vypořádací část.
2.1. Parametrická syntéza a analýza jednosmyčkového ACS.
Analýza automatických řídicích systémů s prvky elektroautomatiky se provádí pomocí algebraických kritérií Gauss a Hurwitz, kritéria Ljapunova, frekvenčních kritérií Michajlova, Nyquista - Michajlova atd.
Při analýze ACS se studují problémy stability a další kvalitativní ukazatele otevřeného a uzavřeného ACS, zjišťují se meze stability v modulu a fázi, astatismus uzavřených systémů, chybovost servosystémů atd.
Mezi hlavní kvalitativní ukazatele systémů, které se zjišťují po zjištění tzv. h-funkcí, patří:
1. Doba přechodného děje t p, po které regulovaná hodnota zůstane blízko ustálené hodnoty;
2. Ustálená hodnota regulované veličiny h¥=limh(t)=h y ;
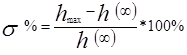
3.Maximální překmit y=(h max -h y)/h y (zde h max je hodnota prvního maxima);
4. Frekvence kmitání w=2p/T (zde T je doba kmitání);
5. Počet kmitů přechodového děje n;
6.Čas k dosažení prvního maxima t max ;
Důležitým ukazatelem kvality ACS je jejich spolehlivost. Kvalitativní ukazatele jsou určeny řešením diferenciální rovnice, které popisují již známé struktury ACS.
Syntéza ACS spočívá v nalezení jeho struktur a parametrů, které by splňovaly dané ukazatele kvality. Syntéza je obtížnější úkol než analýza. Hlavní metody používané při syntéze ACS jsou analytické, graficko-analytické a strojové (s pomocí počítačů).
2.1.1. Vyhodnocení možnosti statické regulace.
Při výběru regulátoru je nutné znát číselné dynamické informace o předmětu regulace, tzn. Ko; T asi, t 0 , které určíme zrychlovací charakteristikou.
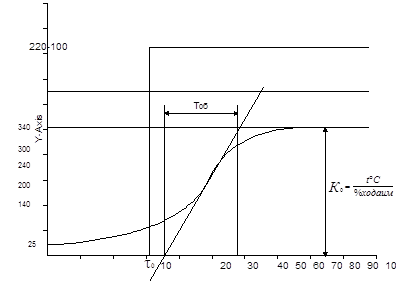
Obr. 4. Křivka zrychlení teploty ACS laboratorního stojanu.
Typ regulátoru je předběžně zvolen ve vztahu k t/T asi;
Kritéria pro výběr regulátorů podle typu akce.
Pro studium a výpočet strukturního diagramu ASR pomocí ekvivalentních transformací je nutné jej zredukovat na nejjednodušší standardní formu objektového regulátoru. To je nezbytné zaprvé, aby bylo možné určit jeho přenosové funkce a následně matematické závislosti, které určují přechodné procesy v systému, a zadruhé jsou zpravidla všechny inženýrské metody pro výpočet a určování nastavení regulátorů aplikované na takovéto standardní konstrukce.
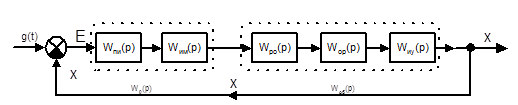
Takže původní blokové schéma teploty ACS podle typického funkčního schématu (viz výkresy) může být znázorněno tak, jak je znázorněno na obrázku.
Kde W P (p), W IM (p), W PO (p), W OP (p), W IU (p), jsou přenosové funkce regulátoru, akčního členu, regulačního orgánu, řídicího objektu a měřicího zařízení, resp. .
Na strukturálním diagramu by měly být všechny vlivy (signály) vyznačeny v Laplaceově transformované podobě.
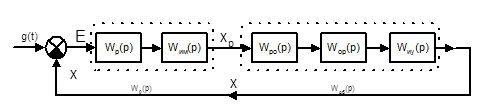
Obrázek 5. Transformované blokové schéma ACS (t).
Všechny vazby, které určují dynamické vlastnosti uzlů rozhraní (spojení, propojení) objektu s regulátorem (například regulační orgány, komunikační linky, měřicí zařízení, senzory atd.), je vhodné zpravidla odkazovat na k předmětu regulace.
Pokud regulátor a akční člen přímo implementují regulační zákon do systému, pak přenosovou funkci regulátoru
W P (p) \u003d W y (p) W IM (p)
Statická regulace je charakterizována přítomností P-regulátoru, pak
W P (p) \u003d K reg
Při optimalizaci hodnot podle experimentálních dat je vhodné vzít K - koeficient regulátoru vzít K = 10
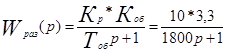
Přenosová funkce regulovaného objektu, s přihlédnutím k vazbám souvisejícím s objektem samotným, má podobu:
W o (p) \u003d W PO (p) W OP (p) W IU (p)
V obecném případě lze jakýkoli jednorozměrný ACS s hlavní zpětnou vazbou postupným posilováním vazeb redukovat na nejjednodušší formu, přenosovou funkci otevřeného systému, která
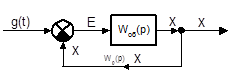 W(p)=W P (p)*W OB (p)
W(p)=W P (p)*W OB (p)
Křivka zrychlení teploty ACS ukazuje, že objekt je inerciální, statický a má zpoždění, protože zpoždění je nevýznamné. Při dalším výzkumu je lze zanedbat. Přenosová funkce objektu pak bude vypadat takto:
W asi (p) \u003d K asi / (T asi p + 1)
Přenosová funkce otevřeného systému
W(p)=W P (p)*W OB (p)
 - se statickou regulací.
- se statickou regulací.
Obr 6. LAFC a LFC pro objekt.
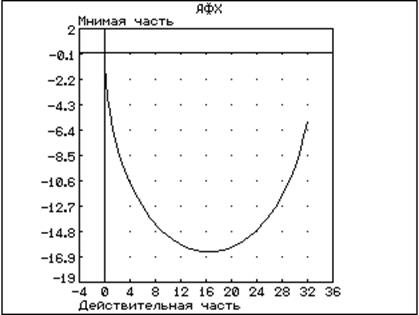
Obr. 7. AFC pro objekt.
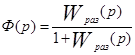
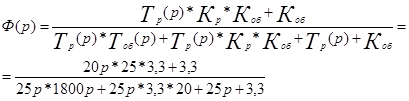
Pojďme najít přenosovou funkci uzavřeného systému:
Protože určí se hodnota časových konstant Designové vlastnosti prvků systému, pak se úprava řídicího systému provádí pouze změnou jeho koeficientu K ovlivněním koeficientu přenosu K p regulátoru.
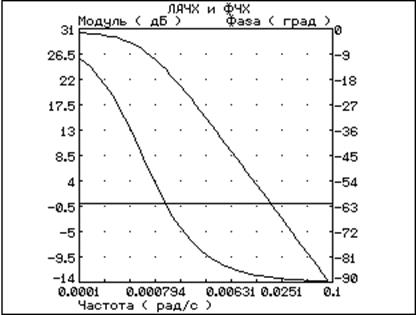
Abychom určili stabilitu systému, sestavíme amplitudově-frekvenční a fázově-frekvenční charakteristiky na logaritmické stupnici a vytvoříme hodograf pomocí uzavřeného systému.
![]()
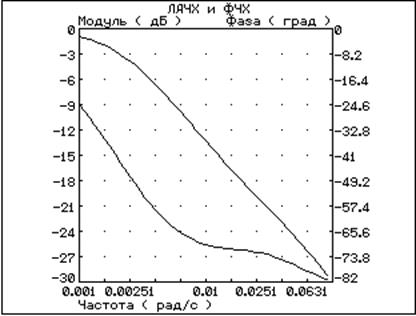
Obr. 8. LAHCH a LPCH se statickou regulací.
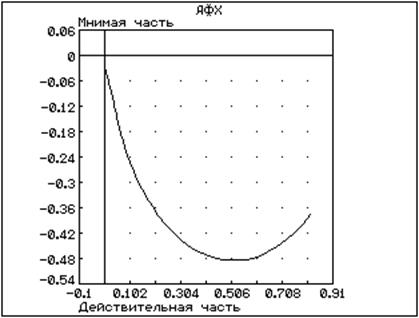
Obrázek 9. Amplitudo-fázová charakteristika uzavřeného systému.
Podle grafů vidíme, že při koeficientu regulátoru K p = 10 je splněna rezerva stability, protože na mezní frekvenci wav je fáze menší než 180°, což charakterizuje stabilitu systému pod statickou kontrolou, což znamená, že je možné použít P-regulátor pro teplotu ACS.
2.1.2. Vyhodnocení možnosti astatické regulace.
Jedním ze znaků astatické vazby (resp. systému jako celku) je přítomnost komplexní proměnné P jako faktoru ve jmenovateli přenosové funkce, tzn. přítomnost integračního prvku.
Zvažme možnost PI-zákona pro řízení teploty ACS. K tomu sestavíme blokové schéma, do kterého zahrneme PI regulátor.
Obrázek 10. Strukturální schéma Teplota SAR.
Přenosová funkce PI regulátoru má tvar
Wp(p)=K+l/Tp; (K=20; Tu=25 sekund)
Pojďme najít přenosovou funkci otevřeného systému
W krát (p) \u003d W p (p) W asi (p)
Najděte přenosovou funkci uzavřeného systému
Na základě přenosové funkce otevřeného systému stavíme LFC a LFC a funkce uzavřeného systému stavíme AFC.
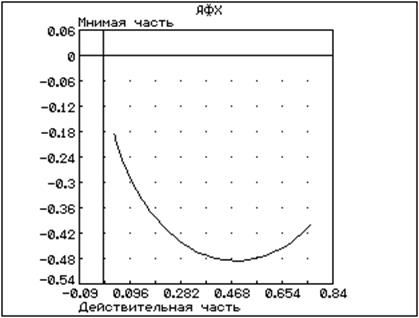
Obrázek 11. Amplitudo-fázová charakteristika uzavřeného systému.
Obrázek 12. LAFC a LPFC s astatickou regulací.
Frekvenční charakteristiky ukazují, že systém má od té doby určitou rezervu stability jak v amplitudě, tak ve fázi při mezní frekvenci w avg fáze< 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Zkoumání kvality jednookruhového automatického řídicího systému.
NA automatické systémy regulace klade požadavky nejen na její udržitelnost. Pro výkon systému je neméně nutné, aby proces automatické kontroly při určitých ukazatelích kvality.
Požadavky na kvalitu regulačního procesu mohou být v každém případě velmi různorodé, nicméně ze všech ukazatelů kvality lze rozlišit několik nejvýznamnějších, které určují kvalitu téměř všech AKT s dostatečnou úplností.
Kvalita procesu regulace systému je zpravidla hodnocena jeho přechodnou funkcí.
Hlavními ukazateli kvality jsou: - doba regulace t p - je doba, po kterou, počínaje okamžikem působení na soustavu, dochází k odchylkám regulované hodnoty Dh(t) od její ustálené hodnoty h 0 =h( ¥) bude menší než přednastavená hodnota E Obvykle se předpokládá, že po uplynutí doby regulace by odchylka regulované hodnoty od ustálené hodnoty neměla být větší než E = 5%. Doba regulace tedy určuje dobu trvání (rychlost) přechodového procesu.
Překmit s je maximální odchylka Dh max regulované veličiny od ustálené hodnoty, vyjádřená v procentech h 0 =h(¥).
Absolutní hodnota Dh max se určí z přechodové křivky:
Dh max \u003d h max - h (¥)
Překročení se tedy bude rovnat:
Kmitání soustavy je charakterizováno počtem kmitů regulované veličiny za dobu regulace t p. Pokud během této doby přechodový proces v systému způsobí počet kmitů menší než stanovený, má se za to, že systém má požadovanou kvalitu regulace z hlediska svého kmitání;
Ustálená chyba E. Ustálená hodnota regulované veličiny h 0 na konci přechodného děje závisí na astatismu n soustavy. V statické systémy(n=0) – chyba ustáleného stavu při konstantní hodnotu vstupní akce není rovna 0 a proto se ustálená hodnota regulované veličiny h 0 bude lišit od nastavené hodnoty o hodnotu ustálené chyby.
Pro kanál rušivého vlivu je chybová hodnota určena výrazem
![]()
kde x 0 je konstantní hnací síla; K je koeficient přenosu systému.
Prostřednictvím kanálu rušivého vlivu, hodnota chyby podle výrazu
kde f 0 je konstantní rušivá akce; K asi - koeficient přestupu regulovaného objektu; K p - koeficient přenosu regulátoru.
Porovnáním přechodových funkcí statické a astatické regulace vybereme optimální regulátor teploty ACS.
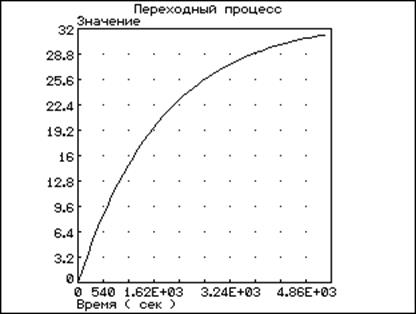
Obr. 13. Přechodná funkce ACS s P-regulátorem
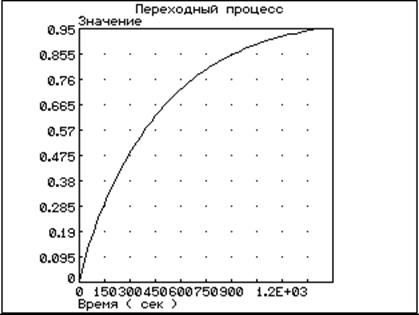
Obrázek 14. Přechodová funkce ACS s PI regulátorem
Z grafů je patrné, že doba regulace u PI regulátoru je kratší než u P regulátoru; to znamená, že pro teplotu ACS je účelné použít pulzní regulátor, který splňuje zákon PI-regulace.
Pro výpočty byl použit program Classic na počítači.
3. Vývoj schématu regulační smyčky pro daný parametr.
Schémata jsou vyrobena v souladu s GOST 2.710-81.
Obrázek 15. Třípolohová regulační smyčka.
Napájení laboratorního stojanu je realizováno automatickým napájecím zdrojem SF1 schéma č. 003E3. Topné těleso ovládacího objektu se v tomto případě zapíná rozpínacím kontaktem KM 1.1. relé KM 1, a sekundární indikační samozáznamové zařízení KSU 4. V poloze 90° univerzálního spínače SA1, motor ventilátoru. V poloze -45°, přepínač SA1, je součástí polohové regulace, v poloze +45° - třípolohová regulace.
Při 2-polohové regulaci se vinutí relé KM1 spíná přes rozpínací kontakt snímače TUDE1. Při překročení nastavené teploty na čidle se jeho kontakt rozepne a rozepne kontakt KM1.1, čímž se vypne topné těleso, což je signalizováno kontrolkou HL4.
Třípolohová regulace je znázorněna na schématu č. 004E2. V automatickém režimu je elektrický signál z tepelného převodníku TSMU postupně přiváděn nejprve na vstup zařízení KSU4(2), svorka 12 a přes svorku 11 vstupuje na vstup 25 řídicí jednotky RBI 1-P.
Proudový signál úměrný nastavené hodnotě teploty je rovněž přiveden na vstup RBI 1-P svorky 21 z nastavovače RZD.
Na výstupu regulátoru dávají svorky 7 a 9 signál „Méně“ a „Více“ vzhledem ke střednímu bodu svorky 10. Signál prochází BRU a rozpínacími kontakty SQ1 a SQ2 IM. akční člen, který ovládá startér FBR, svorky 7 a 9. FBR zapíná kontakty IM 1, 2 a 3.
V režimu ručního ovládání se IM předává tlačítky BRU „Více“ nebo „Méně“.
Závěr
Pro vypočtený systém objektu byly provedeny následující výpočty:
Vypracování funkčního schématu automatického řízení. Získá se přenosová funkce a strukturální transformace schématu řídicího objektu. Jsou konstruovány frekvenční charakteristiky řídicího objektu. Bylo provedeno posouzení schopností statického řídicího objektu (P-regulátor) a také posouzení možnosti astatického řídicího objektu (PI-regulátor). Byla provedena studie kvality jednosmyčkového automatického řídicího systému.
Konstrukce požadovaných frekvenčních charakteristik korigovaného systému byla dokončena. Provádí se výběr a výpočet korekčního zařízení. Byla posouzena kvalita nastaveného systému.
Vývoj schématu regulační smyčky pro daný parametr byl dokončen.
Na základě výpočtů můžeme říci, že výběr korekčního zařízení byl proveden správně a splňuje ukazatele kvality systému s provedenou korekcí.
Bibliografie.
- I.Yu Topchev "Atlas pro návrh CAP"
- PŘED NAŠÍM LETOPOČTEM. Chistyakov „Stručný průvodce měřením tepelné techniky“
- N.N. Ivashchenko "Automatická regulace"
4. V.V. Cherenkov "Průmyslová zařízení a prostředky automatizace"





