Moottori tasavirta(DPT)
Laite:
1. Staattori (kela).
2. Roottori (ankkuri).
Staattori sisältää: kotelon, napojen muodossa olevan magneettipiirin, johon virityskäämi sijaitsee.
induktori nimeä koneen osa, joka on suunniteltu luomaan magneettikenttä.
Roottori sisältää: akselin, magneettipiirin, jonka urissa käämitys sijaitsee, ja harjoilla varustetun keräimen.
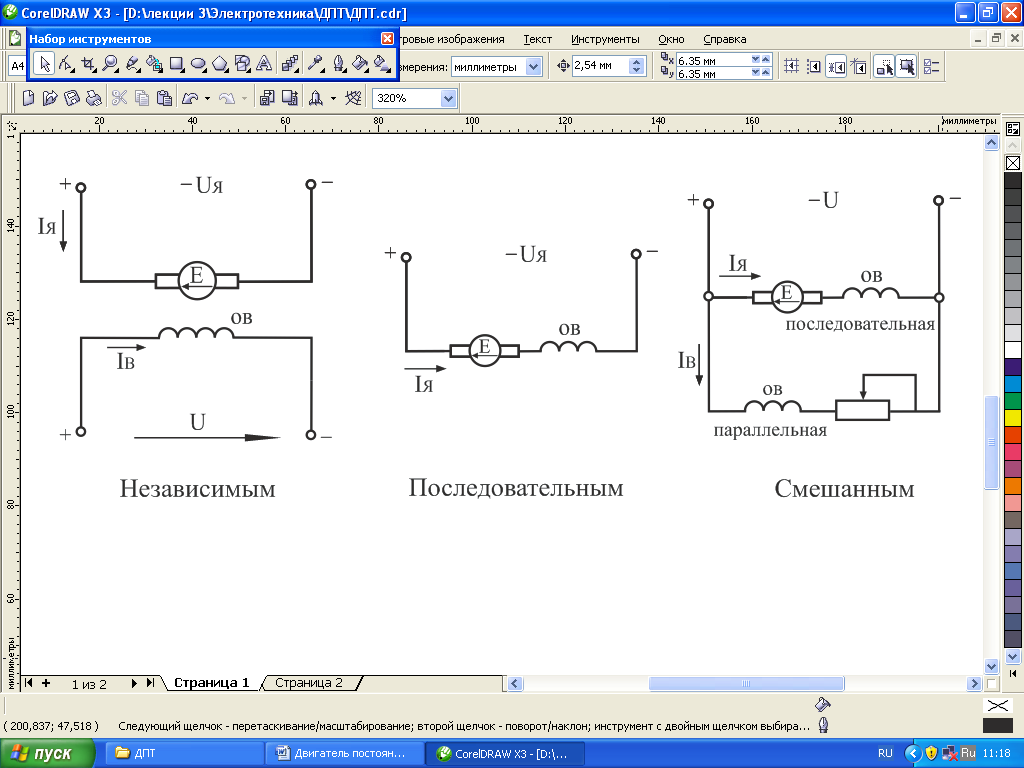
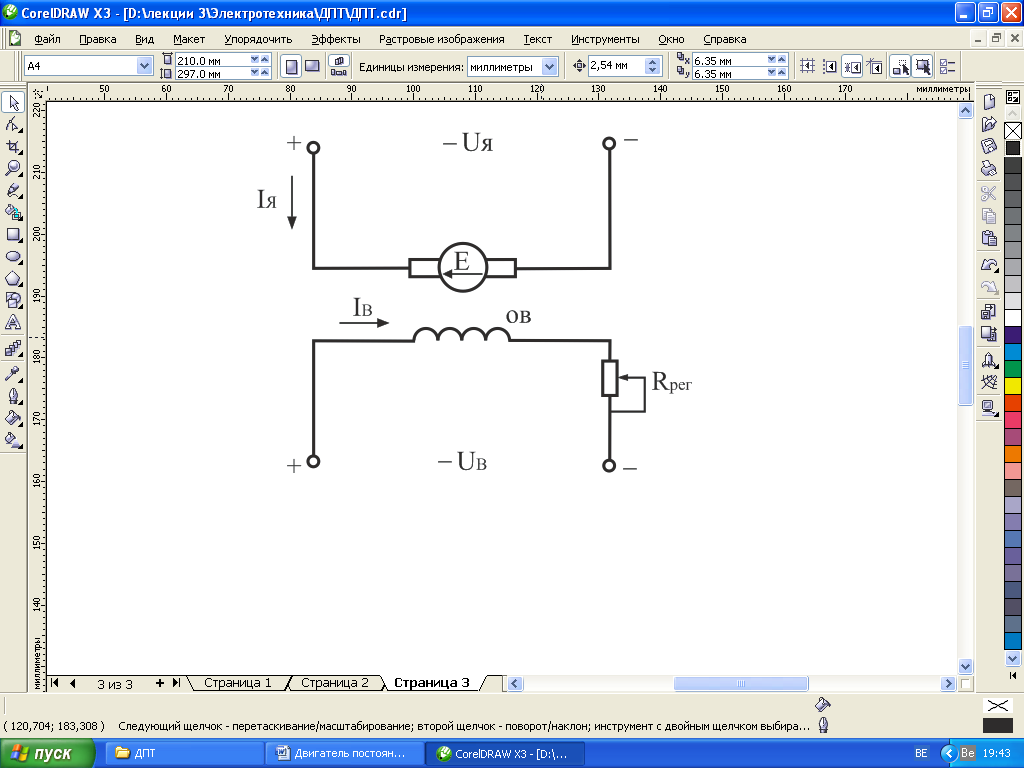
Symboli:

DPT-järjestelmät erilaisia tyyppejä jännitys:
Toimintaperiaate:
U V → I V → F;
missä I V - viritysvirta; I I - ankkurivirta.
Syntyy ankkurivirran vuorovaikutus staattorin magneettivuon F kanssa vääntömomentti:
missä C M on suunnittelutekijä.
M:n vaikutuksesta roottori alkaa pyöriä ylittäen samalla voimalinjat magneettikenttä, minkä seurauksena siihen indusoituu EMF, jota kutsutaan kierto-EMF:ksi:
DPT:n perusyhtälöt:
Ne ovat roottorin sähköisen tasapainon yhtälöitä:
missä on jännitehäviö ankkuripiirissä; on pyörimisen EMF.
Tästä kaavasta saamme käytännössä tärkeän suhteen:
Korvaa sen sijaan
Ja saamme:
![]() .
.
Tämän lausekkeen mukaan on mahdollista rakentaa DPT:n mekaaninen ominaisuus n \u003d f (M), kun otetaan huomioon kuorma, eli M, voit löytää sitä vastaavan pyörimisnopeuden. Jos samaan aikaan U = U nom, Ф = Ф nom, meillä on luonnollinen mekaaninen ominaisuus.
DPT:n mekaaniset ominaisuudet:
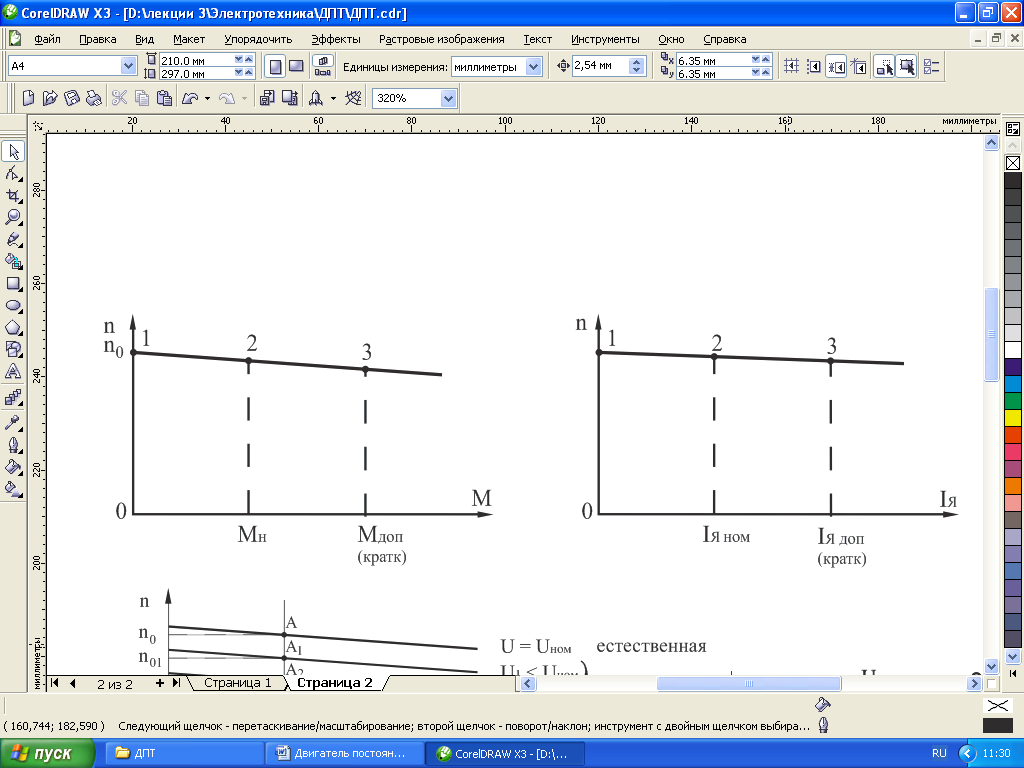
Piste "1" - joutokäynti; koordinaatit М = 0, n = n 0;
"2" - nimellinen tila; koordinaatit M n, n n;
"3" - suurin sallittu lyhytaikainen kuormitus.
Tontti 1–2 - sallittu pitkäaikaistyö.
Kohta 2-3 - vain lyhytaikainen työ on sallittua.
Yleensä lisään \u003d (2 ÷ 2,5) I i nom.
DPT-nopeuden säätö:
![]() ,
,
missä on ankkuriketjun vastus.
Mistä se tulee mahdollisuus nopeudensäätöön kolmella tavalla: , , .
1. Harkitse keinotekoisia mekaanisia ominaisuuksia nopeudensäädössä, vaihtamalla tuloa.
Ilmeisesti moottorin käyttöolosuhteiden mukaan vain pudotus on mahdollista, ja siksi moottorin nopeutta voidaan säätää vain alaspäin, kun taas joutokäyntinopeus (piste "1") laskee.
Ominaisuudet ovat muotoa:
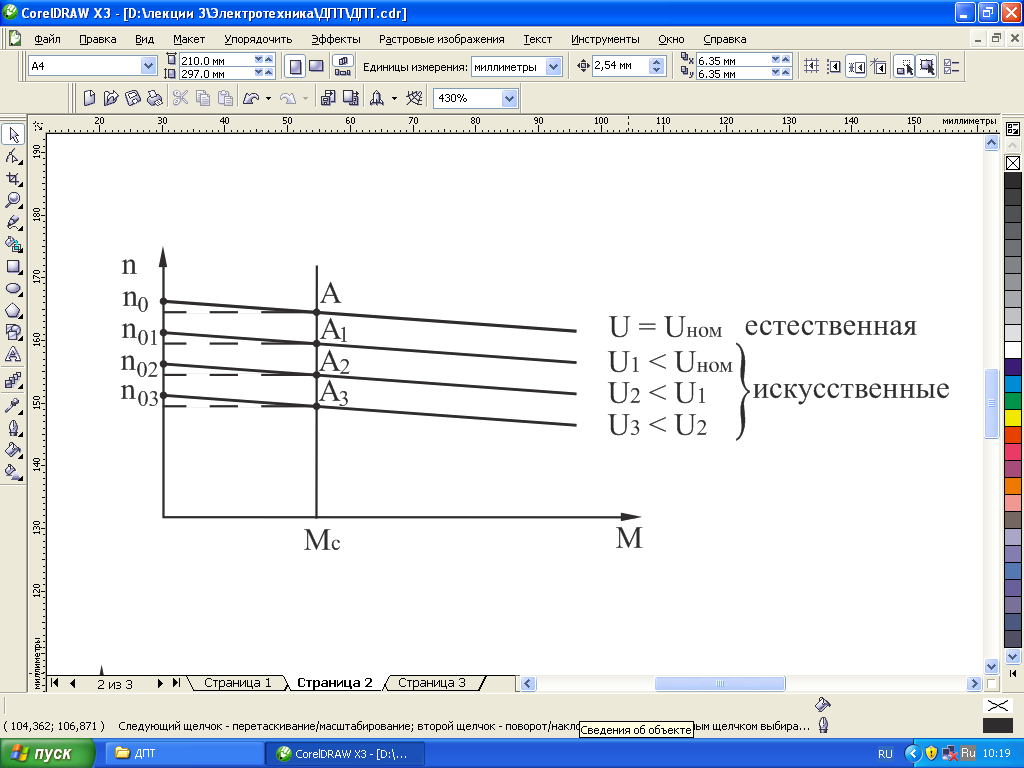
Jos moottorin kuormitusta edustaa ominaiskäyrä M C, niin jännitettä muuttamalla arvosta arvoon saadaan erilaisia nopeuksia n A:sta n A3:een.
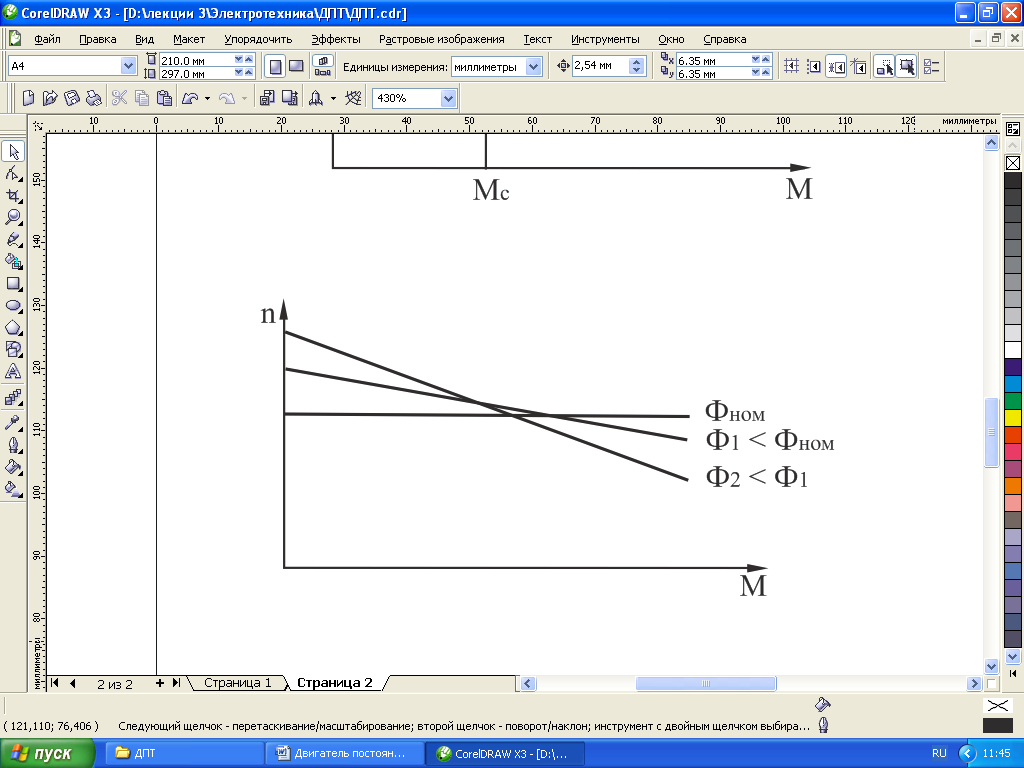
2. Nopeudensäätö magneettivuon suuruuden muutoksia.
Magneettivuon suuruutta voidaan muuttaa käyttämällä virtaa I V, esimerkiksi reostaatilla, vain laskusuuntaan. Magneettivuon väheneminen johtaa nopeuden kasvuun. Siten magneettivuon avulla nopeutta voidaan säätää vain ylöspäin.
3. Harkitse nopeudensäädön mekaanisia ominaisuuksia, ankkuriketjun vastuksen muuttaminen.
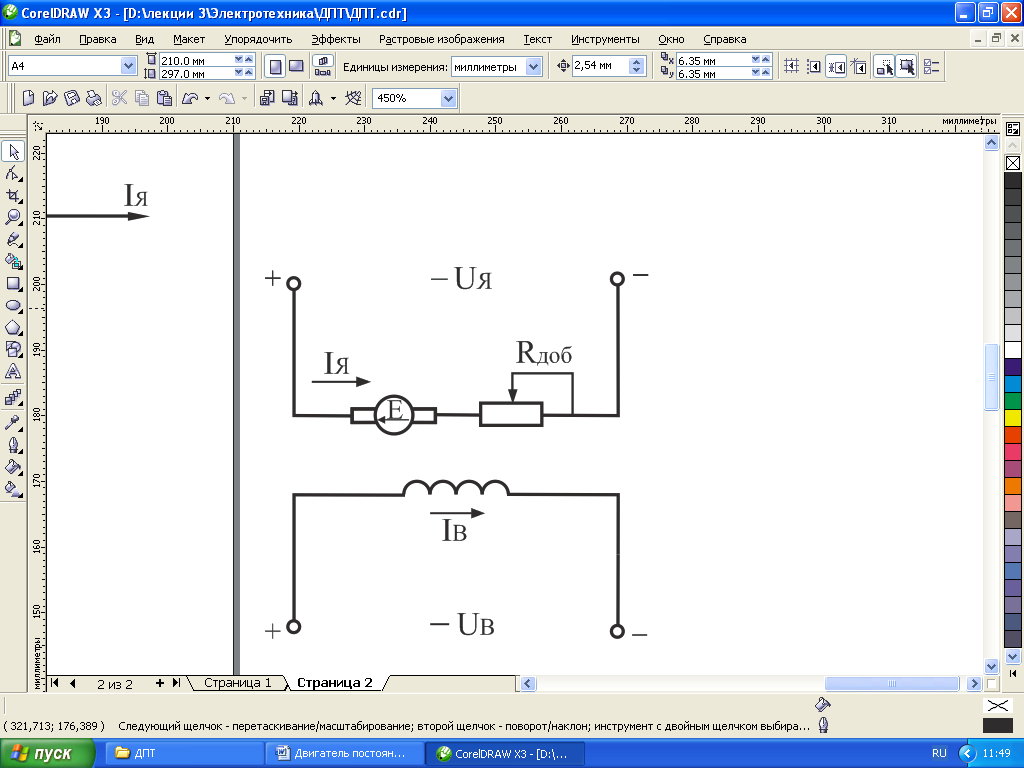
ei riipu R n:stä, joten keinotekoisilla ominaisuuksilla on yhteinen piste .
Käynnistysvirta kun n = 0 ja E = 0 on muotoa ja saavuttaa liian suuria arvoja, mikä ei salli moottorin käynnistämistä. Käynnistysvirtojen vähentämiseksi ankkuripiiriin lisätään lisävastus:
Virta pienenee ja ominaisuudella on muoto:

Toimintaperiaate (esimerkiksi moottorista rinnakkainen heräte). Jos moottoriin syötetään jännite U, virta I c kulkee virityspiirin läpi ja virta I i virtaa ankkuripiirin läpi. Herätysvirta muodostaa MMF:n F in = I in W in, mikä herättää koneen magneettivuon F in. Ankkurin virta puolestaan synnyttää ankkurireaktion F i magneettivuon. Tuloksena oleva magneettivuo F res \u003d F in + F i.
Kuva 1.23 1.24
Ankkuripiirissä virta I i luo jännitehäviön R i I i. Sähkömagneettisen voiman EMC-lain mukaisesti virran I I ja magneettivuon F res vuorovaikutuksessa syntyy vääntömomentti M BP. Vakiotilassa M temp. \u003d M pr. Kun ankkurijohtimet ylittävät magneettikentän F res, niihin indusoituu sähkömagneettisen induktion lain EMP mukaisesti EMF, joka on suunnattu verkkojännitettä U vastaan.
Moottoreiden luokitus. Päänapojen virityskäämien päällekytkentäpiirin mukaan tasavirtamoottorit on jaettu itsenäisiin, rinnakkaisiin, sarja- ja sekoitettuihin moottoreihin.
moottoreissa itsenäinen herätys herätekäämi saa virran erillisestä tasajännitelähteestä. Rinnakkaisissa viritysmoottoreissa kenttäkäämitys ja ankkurikäämi on kytketty rinnan ja saavat virran samasta lähteestä. Sarja- ja sekoitusmoottoreissa on virityskäämi, joka on kytketty sarjaan ankkurikäämin kanssa. Pienitehoisissa moottoreissa viritysvuo voidaan luoda kestomagneeteilla. Rinnakkais- ja sekaviritysmoottorit löytävät suurimman sovelluksen.
Moottoreita kuvaavat perusyhtälöt ja suuret. Nämä arvot ovat: mekaaninen voima akselilla P 2, syöttöjännite U, verkosta I kulutettu virta, ankkurivirta I I, herätevirta I in, pyörimisnopeus n, sähkömagneettinen momentti M um. Näiden määrien välinen suhde on kuvattu:
Ø sähkömagneettinen vääntömomenttiyhtälö:
M em \u003d C m I I F;
Ø ankkuripiirin sähköisen tilan yhtälöllä:
U \u003d E pr + R i I i; (1.4)
E pr \u003d C E nФ;
Ø momenttiyhtälö:
M em \u003d M s + M hiki + M d,
missä M s on kuorman aiheuttama vastuksen momentti akselilla; M hiki - kaikentyyppisten moottorin häviöiden aiheuttamien häviöiden hetki; M d - inertiavoimien luoma dynaaminen momentti;
Moottoreiden ominaisuudet. Ominaisuuksista tärkein on mekaaninen n (M s) - pyörimisnopeuden n riippuvuus akselin vääntömomentista (jäljempänä indeksi "c" jätetään pois), kun U = const, I в = const. Se näyttää moottorin akseliin kohdistuvan mekaanisen kuormituksen (vääntömomentin) vaikutuksen nopeuteen, mikä on erityisen tärkeää tietää moottoreita valittaessa ja käytettäessä. Muut moottorin ominaisuudet: säätö n (I c), suuri nopeus n (I i), käyttö M, R 1, n, I, h (R 2) - ei käsitellä tässä yksityiskohtaisesti.
Mekaaniset ominaisuudet voivat olla luonnollisia tai keinotekoisia. Alla luonnollinen Ominaisuuksilla tarkoitetaan ominaisuuksia, jotka on otettu ilman lisävastuita piirissä, esimerkiksi ankkurin reostaatit tai virityspiireissä, keinotekoinen- tällaisten vastusten läsnä ollessa.
Mekaaninen yhtälömoottorin ominaisuudet. Se voidaan saada kohdasta (1.1). Korvaamme E:n sijaan sen arvon kohdassa (1.4).
n \u003d (U - R i I i) / C E F. (1.5)
Korvaamalla I i sen arvolla (1.2), saadaan yhtälö mekaaniset ominaisuudet:
n= ![]() (1.6)
(1.6)
Mekaanisen ominaisuuden tyyppi määräytyy vuon moottorin kuormituksesta riippuvuuden luonteen mukaan, mikä puolestaan riippuu virityskäämin kytkemispiiristä.
Moottorin suunnanvaihto. Moottorin suunnanvaihto ymmärretään sen ankkurin pyörimissuunnan muutokseksi. Mahdolliset käänteiset tavat johtuvat suhteesta (1.2). Jos muutat ankkurivirran tai koneen virtauksen suuntaa, etumerkki ja siten vääntömomentin suunta muuttuvat. Käytännössä tämä saavutetaan kytkemällä johtimia tai ankkurikäämiä tai virityskäämiä. Molempien käämien lähtöjen samanaikainen kytkeminen tai moottoria syöttävän jännitteen polariteetin muutos (paitsi erillinen herätemoottori) ei kuitenkaan johda vääntömomentin etumerkin muutokseen ja siten pyörimissuunta.
Moottoreiden käynnistäminentasavirta. Moottoreiden käynnistämisessä on kaksi päävaatimusta: ankkurin käynnistämiseen ja kiihdyttämiseen tarvittava vääntömomentti ja liiallisen virtauksen estäminen ankkurin läpi käynnistyksen aikana. korkea virta vaarallinen moottorille. Kolme käynnistystapaa on käytännössä mahdollista: suora käynnistys, käynnistys, kun reostaatti on kytketty ankkuripiiriin, ja aloitus alijännite ankkuriketjussa.
Suorakäynnistyksellä ankkuripiiri kytkeytyy välittömästi täyteen jännitteeseen. Koska ensimmäisellä käynnistyshetkellä ankkuri on paikallaan (n = 0), ei ole back-emf (E pr = C E nF). Sitten kohdasta (1.4) seuraa, että ankkurin käynnistysvirta I i, p \u003d U / R i.
Koska R i \u003d 0,02 ¸ 1,10 Ohm, niin I i, n \u003d (50 ¸ 100) I nom, mikä ei ole hyväksyttävää. Siksi suora käynnistys on mahdollista vain pienitehoisilla moottoreilla, joissa I i, n (4¸6) I nom ja moottorin kiihtyvyys kestää alle 1 s.
Käynnistystä, kun käynnistysreostaatti R p kytketään päälle sarjaan ankkurin kanssa, tarkastellaan kuvan 1 piirin esimerkin avulla. 1.25. Käynnistysvirta tässä tapauksessa on:
I i,n \u003d U / (R i + R p). (1.7)
Resistanssi R p \u003d U / I i, p - R i valitaan siten, että aloitushetkellä, kun E pr \u003d 0, I i, p \u003d (1,4¸2,5) I nom (suurempi luku tarkoittaa pienempitehoisiin moottoreihin).
Ankkurin kiihtyessä Epr kasvaa, mikä vähentää ankkurissa olevaa jännitettä (eli osoittaja (1.7) pienenee), ja reostaatin Rp vastus tulee ulos.
Ennen käynnistystä näytetään reostaatti R p, mikä on tarpeen maksimaalisen virtauksen ja siten vääntömomentin varmistamiseksi käynnistyksessä (M p \u003d C m I I, p F). Ankkurin kiihtyessä reostaatti Rp syötetään, kunnes vaadittu nopeus saavutetaan.
Käynnistys rajoitetulla käynnistysvirralla on mahdollista, kun moottorin ankkuri saa virtaa erillisestä lähteestä (generaattori, tasasuuntaaja) säädettävällä jännitteellä. Käynnistysvirran rajoitus ja moottorin tasainen kiihtyvyys saadaan aikaan nostamalla ankkurijännitettä asteittain nollasta vaadittuun arvoon.
Tarkasteltavaa menetelmää voidaan soveltaa voimakkaiden tasavirtamoottoreiden ohjaus- ja säätöjärjestelmissä (katso kohta 1.14.3).
§ 115. DC-MOOTTORIEN OMINAISUUDET
Moottoreiden käyttöominaisuudet määräytyvät niiden suorituskykyominaisuuksilla, jotka ovat kierrosten lukumäärän t, vääntömomentin Me, kulutetun virran I, tehon P1 ja hyötysuhteen η riippuvuudet akselin hyötytehosta P2- Nämä riippuvuudet vastaavat moottorin luonnollisia olosuhteita, eli konetta ei säädetä ja verkkojännite pysyy vakiona. Niin
kuten hyötytehon P2 (eli akselin kuormituksen) muutoksen yhteydessä, myös ankkurin virta muuttuu
koneissa suorituskykyominaisuudet piirretään usein ankkurivirran funktiona. Vääntömomentin ja pyörimisnopeuden riippuvuudet rinnakkaisherätysmoottorin ankkurissa olevasta virrasta on esitetty kuvassa. 152, ja sadan kaavio on esitetty yllä (katso kuva 151).
Moottorin nopeus määritetään seuraavalla lausekkeella:
> Moottorin akselin kuormituksen kasvaessa myös ankkurissa oleva virta kasvaa. Tämä lisää jännitehäviötä ankkurikäämin ja harjan koskettimien resistanssissa.
Koska viritysvirta pysyy vakiona (konetta ei säädetä), on myös magneettivuo vakio. Kuitenkin ankkurin virran kasvaessa armatuurireaktiovuon demagnetoiva vaikutus kasvaa ja magneettivuo Ф pienenee jonkin verran. Iaryan nousu vähentää moottorin nopeutta ja Ф:n lasku lisää nopeutta. Tyypillisesti jännitehäviö vaikuttaa nopeuden muutokseen hieman enemmän kuin ankkurivaste, joten ankkurivirran kasvaessa nopeus pienenee. Tämän tyyppisen moottorin nopeuden muutos on merkityksetön eikä ylitä 5 %, kun kuorma muuttuu nollasta nimellisarvoon, eli rinnakkaisherätemoottoreilla on jäykkä nopeusominaisuus.
Jatkuvalla magneettivuolla vääntömomentin riippuvuus ankkurin virrasta esitetään suoralla viivalla. Mutta vaikutuksen alaisena

Ankkurin reaktiomoottorin vääntömomentti kuormituksen kasvaessa on hieman magneettivuon lasku ja momentin riippuvuus menee hieman suoran alapuolelle.
Jaksottaisen viritysmoottorin kaavio on esitetty kuvassa. 153. Tämän moottorin käynnistysreostaatissa on vain kaksi puristinta, koska virityskäämi ja ankkuri muodostavat yhden sarjapiirin. Moottorin ominaisuudet näkyvät kuvassa. 154. Jaksottaisen viritysmoottorin kierrosten lukumäärä määritetään seuraavalla lausekkeella:
![]()
missä rc on sarjaherätyskäämin vastus. Sarjaviritysmoottorissa magneettivuo ei pysy vakiona, vaan muuttuu dramaattisesti kuormituksen muutosten myötä, mikä aiheuttaa merkittävän muutoksen nopeudessa. Koska ankkurin resistanssin ja kenttäkäämin jännitehäviö on hyvin pieni verrattuna käytettyyn jännitteeseen, kierrosten lukumäärä voidaan määrittää likimäärin seuraavalla lausekkeella:
Jos jätämme huomiotta teräksen kyllästymisen, voimme pitää magneettivuon verrannollista kenttäkäämin virtaan, joka on yhtä suuri kuin ankkurin virta. Näin ollen sarjaviritysmoottorilla pyörimisnopeus on kääntäen verrannollinen ankkurissa olevaan virtaan ja kierrosten lukumäärä pienenee jyrkästi kuormituksen kasvaessa, eli moottorilla on pehmeä nopeusominaisuus. Kun kuormitus pienenee, moottorin nopeus kasvaa. Tyhjäkäynnillä (Ia = 0) moottorin nopeus kasvaa loputtomasti, eli moottori menee ylikierrokselle.
Näin ollen sarjaviritysmoottoreille tunnusomainen ominaisuus on kuormanpoiston, eli joutokäynnin tai pienillä kuormituksilla, sallimattomuus. Moottorissa on minimi sallittu kuorma, mikä on 25-30 % nimellisarvosta. Kun kuorma on pienempi kuin pienin sallittu nopeus, moottori kasvaa jyrkästi, mikä voi aiheuttaa sen tuhoutumisen. Siksi sarjaherätettävien moottoreiden käyttöä ei voida hyväksyä, kun kuormituksen irtoaminen tai äkillinen pienentäminen on mahdollista.
Hyvin pienissä moottoreissa kuorman irtoaminen ei aiheuta karkaamista, koska moottorin mekaaniset häviöt ovat riittävät. raskas kuorma hänelle.
Sarjan herätemoottorin vääntömomentti, ottaen huomioon magneettivuon ja ankkurissa olevan virran välinen suhteellinen suhde (F \u003d C "Ia), voidaan määrittää seuraavalla lausekkeella:
missä K'=KC'
nuo. vääntömomentti on verrannollinen virran neliöön. Kuitenkin suurilla virroilla teräksen kyllästyminen vaikuttaa ja momentin riippuvuus lähestyy suoraa. Näin ollen tämän tyyppiset moottorit kehittävät suuria vääntömomentteja alhaisilla nopeuksilla, mikä on olennaista käynnistettäessä suuria hitausmassoja ja ylikuormituksia. Näitä moottoreita käytetään laajalti kuljetus- ja nostosovelluksissa.
Sekavirityksellä virityskäämien konsonantti- ja vastakytkentä on mahdollista.
Vastakkaisilla käämeillä varustettuja moottoreita ei käytetä laajalti, koska niillä on huonot käynnistysominaisuudet ja ne ovat epävakaita.
Sekaviritysmoottoreiden nopeusominaisuudet ovat rinnakkais- ja sarjaviritysmoottoreiden ominaisuuksien välissä.
Kun ankkurin virta kasvaa, ankkurin kierrosluku laskee enemmän kuin rinnakkaisherätemoottoreissa, mikä johtuu sarjakenttäkäämin virran kasvusta johtuvasta magneettivuon kasvusta. Tyhjäkäynnillä sekaviritysmoottori ei käy villinä, koska magneettivuo ei laske nollaan rinnakkaisen kentän käämin vuoksi.
Sekaviritysmoottoreiden kuormituksen kasvaessa magneettivuo kasvaa ja vääntömomentti kasvaa enemmän kuin rinnakkaisherätemoottoreissa, mutta vähemmän kuin sarjaviritysmoottoreissa.
1. Tasavirtakoneiden laite.
Tasavirtakoneilla, jotka voivat toimia sekä moottorina että generaattorina, on useita etuja. Moottoria käynnistettäessä syntyy suuri käynnistysmomentti. Siksi tällaisia moottoreita käytetään sähköajoneuvojen vetona. Laajat rajoitukset ja nopeudensäädön tasaisuus määräävät tasavirtamoottoreiden käytön erilaisissa automaattisissa ohjausjärjestelmissä.
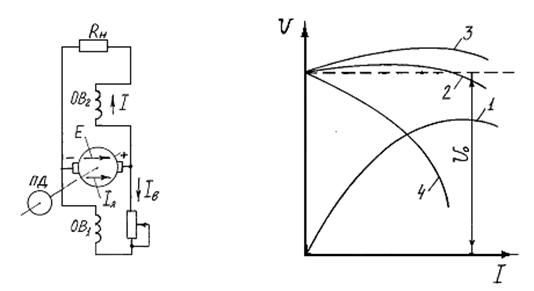
Tasavirtageneraattoreita käytetään eri tehoyksiköiden (erityisesti korkealaatuisten hitsauskoneiden) tehonlähteenä. DC-koneiden teho on hyvin erilainen:
muutamasta watista kymmeniin kilowatteihin. Liikenteessä käytetään moottoreita, joiden jännite on 550 V ja teho 40 - 45 kW (raitiovaunut), joiden jännite on 1500 V ja teho enintään 12 000 kW (sähköveturit). Tasavirtakoneiden hyötysuhde on mitä suurempi, sitä suurempi teho. Teholla 100 W asti hyötysuhde = 62 %, teholla 100 kW asti hyötysuhde saavuttaa 91 %. DC-koneiden haittapuolena on harja-keräinkokoonpano, joka on yksi epäluotettavimmista koneen osista. Harkitse yksinkertaisimman tasavirtakoneen laitetta:
1 - navat, jotka edustavat yleensä käämiä, jossa on sydän,
2 - ankkuri (tai roottori) - pyörivä osa,
3 - johtimet ankkurin urissa.
Kiinteää osaa, johon navat on kiinnitetty, kutsutaan staattoriksi tai induktoriksi. Induktori luo koneen päämagneettikentän. GN - geometrinen neutraali, viiva, joka kulkee keskellä vierekkäisten napojen välillä.
Tasavirtakoneiden tärkein suunnitteluominaisuus on harja-keräinkokoonpanon läsnäolo: 1 - harja, 2 - keräinlevy. Ankkurikäämin yksittäisten osien lähdöt sopivat kollektorilevyille. Harja-keräinyksikkö suorittaa:
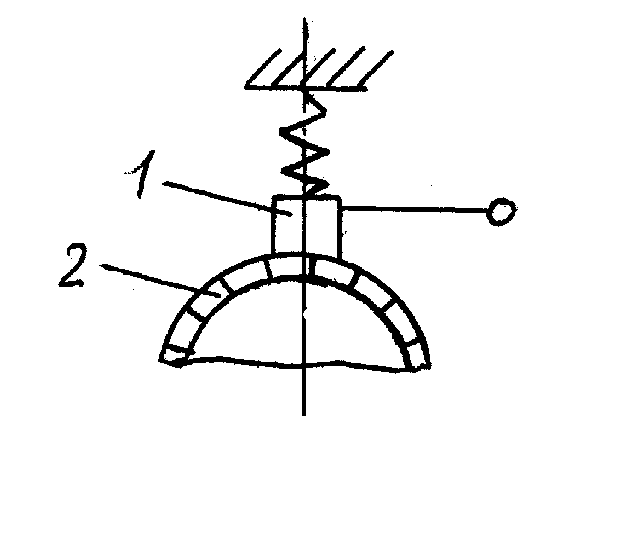
Liukuva kosketus kiinteiden ulkojohtimien ja ankkurikäämin pyörivien osien välillä,
Virran tasasuuntaus generaattoritilassa,
Tasavirran muuntaminen vaihtovirraksi (invertointi) moottoritilassa.
Tasavirtakoneet, kuten monet muutkin sähkökoneet, ovat käännettäviä, ts. sama kone voi toimia sekä generaattorina että moottorina.
2. Generaattorin ja moottorin toimintaperiaate.
Generaattoritilassa koneen ankkuri pyörii ulkoisen momentin vaikutuksesta. Staattorin napojen välissä on jatkuva magneettivuo, joka tunkeutuu ankkuriin. Ankkurin käämitysjohtimet liikkuvat magneettikentässä ja siksi niihin indusoituu EMF, jonka suunta voidaan määrittää "oikean käden" säännöllä. Tässä tapauksessa positiivinen potentiaali syntyy yhdessä harjassa suhteessa toiseen. Jos generaattorin liittimiin on kytketty kuorma, virta kulkee siinä. Kun ankkuria on käännetty tietyn kulman läpi, harjat liitetään toiseen levypariin, ts. kytketty ankkurikäämin toiseen kierrokseen, jonka EMF:llä on sama suunta. Näin generaattori tuottaa
sähkövirta, ja tämän kuorman läpi kulkevan virran suunta ei muutu.
Kun kuorma on kytketty generaattoriin ja ankkurivirran syntyessä, akselilla tapahtuu sähkömagneettinen vääntömomentti, joka on suunnattu ankkurin pyörimissuuntaa vastaan. Moottoritilassa koneen kiinnikkeet toimitetaan mukana jatkuva paine, ja virta kulkee ankkurikäämin läpi. Ankkurin käämin johtimet ovat viritysvirran synnyttämässä koneen magneettikentässä ja siten lain mukaan niillä
Ampere, voimat toimivat. Näiden voimien yhdistelmä luo vääntömomentin, jonka vaikutuksesta ankkuri pyörii. Kun ankkuri pyörii, sen käämiin indusoituu EMF, joka on suunnattu virtaa kohti, ja siksi moottoreille sitä kutsutaan takaisin-EMF:ksi.
3. Ankkurin emf- ja vääntömomenttiyhtälöt.
Harkitse yhtä ankkuriraon johtimista. Anna sen liikkua (ankkurin pyörimisen aikana) lineaarisella nopeudella V, jolloin EMF indusoituu tähän johtimeen:
E \u003d V cf l i V sin  ,
,
missä \u003d 90, lа - ankkurin aktiivisen osan pituus, V cf - keskimääräinen magneettikentän induktio raossa.
Olkoon 2a rinnakkaisten haarojen lukumäärä. Koska EMF on yhtä suuri kuin yhden haaran EMF, voimme kirjoittaa:

missä E i on ankkurin vaadittu EMF, N on kaikkien ankkurijohtimien lukumäärä.
missä Ф on yhden navan magneettivuo ja S on tämän vuon läpäisemä alue, niin

tässä p on napaparien lukumäärä (p = 1,2, ...).
Nopeus V voidaan ilmaista ankkurin nopeudella n:
Korvaamalla saadut lausekkeet E i:n kaavaan:

sitten vihdoin saamme:
E i \u003d C E F n.
Voidaan nähdä, että ankkurin EMF on verrannollinen ankkurin pyörimistaajuuteen ja napojen magneettivuon. Amperen lain avulla löydämme voiman, jolla virityskenttä vaikuttaa yhteen ankkurijohtimeen:
F = V cf l i I synti
,
tässä = 90, I - virta johtimessa.
Tämä voima luo vääntömomentin:
missä D on ankkurin halkaisija. Kerrotaan johtimien kokonaismäärällä N, saadaan kokonaismomentti:
Keskimääräinen induktio In cf, kuten edellä, saadaan jakamalla yhden navan magneettivuo tämän vuon läpäisemällä alueella:
Koska ankkurivirta leviää rinnakkaisia haaroja pitkin, yhden johtimen virta määräytyy lausekkeella:

Korvaamalla lausekkeet B cf ja I yleisen hetken kaavaan, saadaan:

Jos otamme käyttöön rakentavan kertoimen
sitten vihdoin voimme kirjoittaa:
Kuten näet, DC-koneen sähkömagneettinen momentti on verrannollinen napojen magneettivuon ja ankkurivirtaan.

Yllä saatu ankkurin EMF-kaava Ea antaa jonkin verran EMF:n keskiarvoa. Itse asiassa sen arvo vaihtelee (pulsseja) kahden raja-arvon välillä - E min ja E max. Ankkurin pyöriessä osa harjojen oikosuljettamia kierroksia kytkeytyy pois rinnakkaisista haaroista ja sen aikana, kun ankkuri pyörii yhtä keräinlevyä vastaavan kulman läpi, hetkellisten EMF-arvojen summa. on aikaa muuttua jonkin verran. Tuloksena olevien EMF-pulsaatioiden maksimiarvo E = 0,5 (E max -E min) riippuu keräyslevyjen lukumäärästä. Esimerkiksi kun tämä luku kasvaa 8:sta 40:een, E:n arvo laskee 4 V:sta 0,16 V:iin.
4. Ankkurireaktio DC-koneissa.
Kun tasavirtakone on joutokäynnillä, magneettikenttä syntyy vain napakäämityksistä. Virran esiintyminen ankkurin johtimissa kuormituksen alaisena liittyy ankkurin magneettikentän ilmestymiseen. Koska harjojen välisten johtimien virtojen suunta on muuttumaton, pyörivän ankkurin kenttä on kiinteä suhteessa harjoihin ja viritysnapoihin.
Ankkurin käämitys tulee analogiseksi solenoidin kanssa, jonka akseli osuu yhteen harjojen linjan kanssa, joten kun harjat asennetaan geometrisille neutraaleille, ankkurivirtaus on poikittainen viritysvirtaan nähden, ja sen vaikutusta jälkimmäiseen kutsutaan poikittaiseksi ankkuriksi. reaktio. Kun tuloksena olevan virtauksen vektori on rakennettu, näemme, että se pyörii nyt päänapojen geometrisen akselin ympäri. Koneen kenttä muuttuu epäsymmetriseksi, fyysiset neutraalit pyörivät suhteessa geometrisiin. Generaattorissa ne siirretään ankkurin pyörimissuuntaan, moottorissa - ankkurin pyörimissuuntaa vastaan.
Fyysisen nollan alla ymmärretään ankkurin keskustan ja ankkurikäämin johtimen läpi kulkeva linja, jossa tuloksena olevan magneettivuon indusoima EMF on nolla. Ankkurin sivureaktiolla on vain vähän vaikutusta koneen suorituskykyyn, tätä vaikutusta ei yleensä oteta huomioon. Kuitenkin, kun harjat siirretään geometrisesta neutraalista, ankkurivuon ilmaantuu pitkittäiskomponentti, jonka vaikutusta napavuon kutsutaan pitkittäisankkurireaktioksi. Se voi olla sekä magnetoivaa että demagnetoivaa luonteeltaan. Yleensä ankkurireaktio johtaa kentän vääristymiseen napojen alla ja muutokseen napojen virtauksessa. Ensimmäinen voi aiheuttaa merkittävän kipinöinnin lisääntymisen harjojen alla (kollektorissa yleispalon ilmaantumiseen asti), ja jälkimmäinen generaattorissa muuttaa jännitettä liittimissä ja moottorissa vääntömomenttia ja ankkurin nopeutta. .
Ankkurin reaktion heikentämiseksi staattorin ja ankkurin välistä ilmarakoa kasvatetaan, napakappaleiden urissa käytetään erityisiä oikosulkukierroksia. Suuritehoisissa koneissa tätä tarkoitusta varten käytetään erityistä kompensointikäämiä. Se sopii napakappaleiden uriin ja on kytketty sarjaan ankkuripiiriin, sen virtaus tasapainottaa ankkurin pituussuuntaista virtausta.
Suosittelemme lukemaan
, diagnoosi, hoito Urogenitaalisen klamydian hoito") Urogenitaalisen klamydia - kuvaus, syyt, oireet (merkit), diagnoosi, hoito Urogenitaalisen klamydian hoito
Urogenitaalisen klamydia - kuvaus, syyt, oireet (merkit), diagnoosi, hoito Urogenitaalisen klamydian hoito Hyödyt ja merkitys hydroaminohapon treoniinin ihmiskeholle L treoniini mitä
Hyödyt ja merkitys hydroaminohapon treoniinin ihmiskeholle L treoniini mitä Odottaako tai olla odottamatta kaveria armeijasta Mistä syystä heidät voidaan tilata armeijasta
Odottaako tai olla odottamatta kaveria armeijasta Mistä syystä heidät voidaan tilata armeijasta Paistetut omenat raejuustolla Paistetut omenat raejuustolla
Paistetut omenat raejuustolla Paistetut omenat raejuustolla

