Motor corriente continua(TED)
Dispositivo:
1. Estator (inductor).
2. Rotor (ancla).
El estator incluye: una carcasa, un circuito magnético en forma de polos, en el que se encuentra el devanado de excitación.
inductor nombre la parte de la máquina que está diseñada para crear un campo magnético.
El rotor incluye: un eje, un circuito magnético, en cuyas ranuras se encuentra el devanado, y un colector con escobillas.
Símbolo:

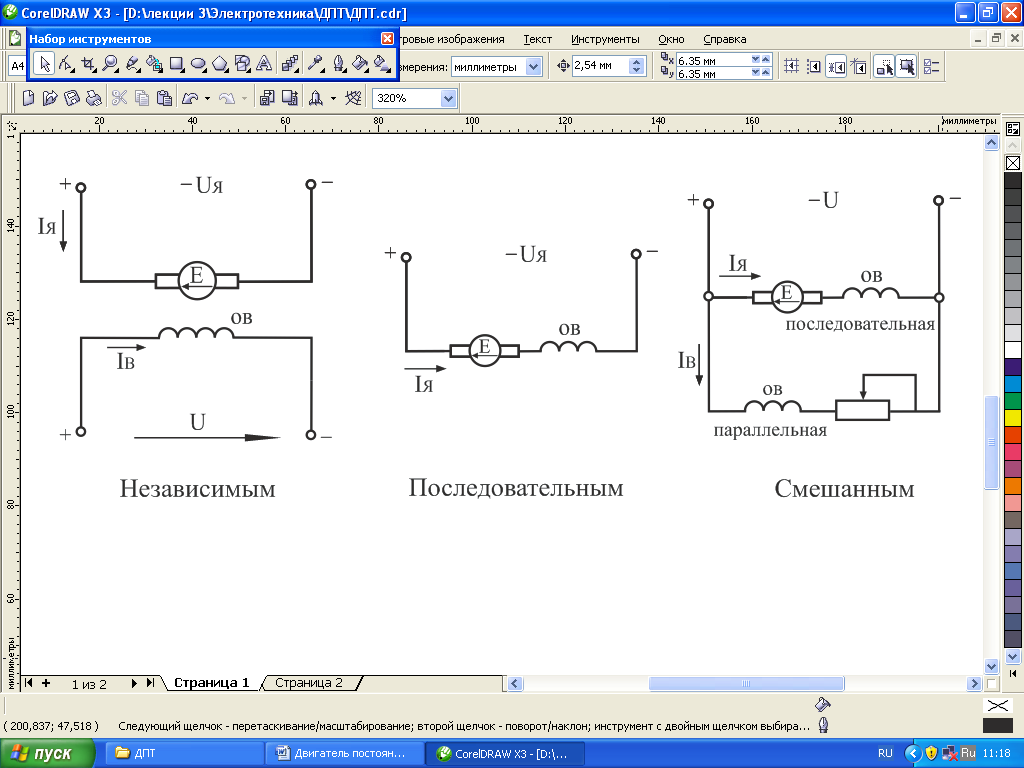
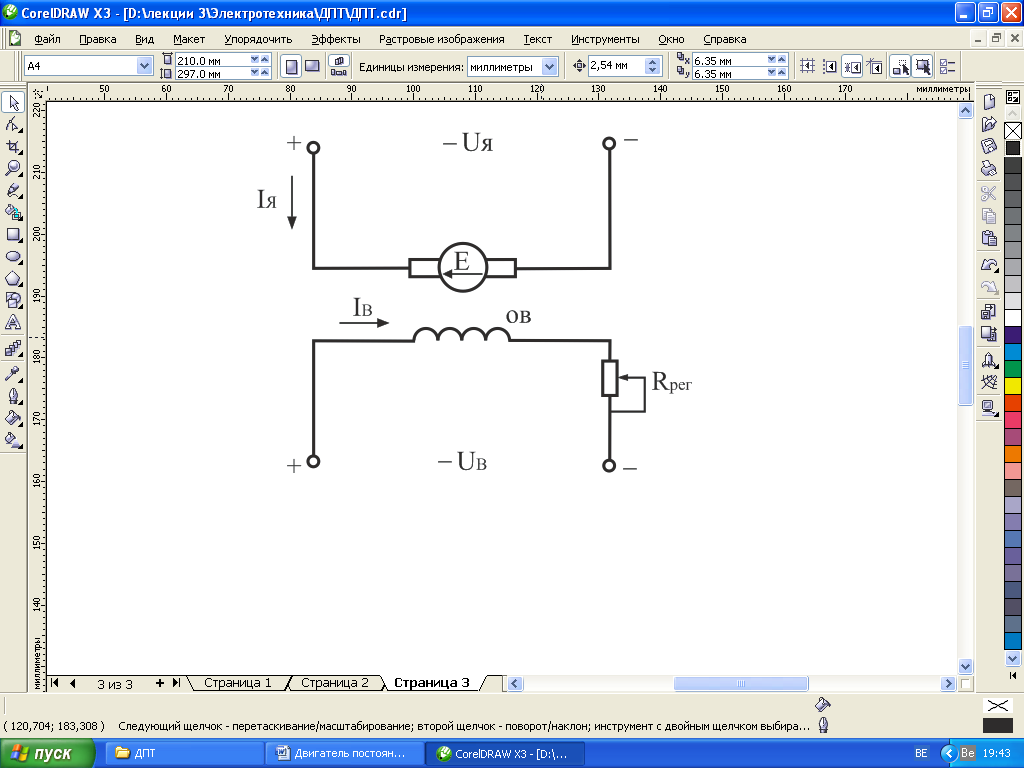
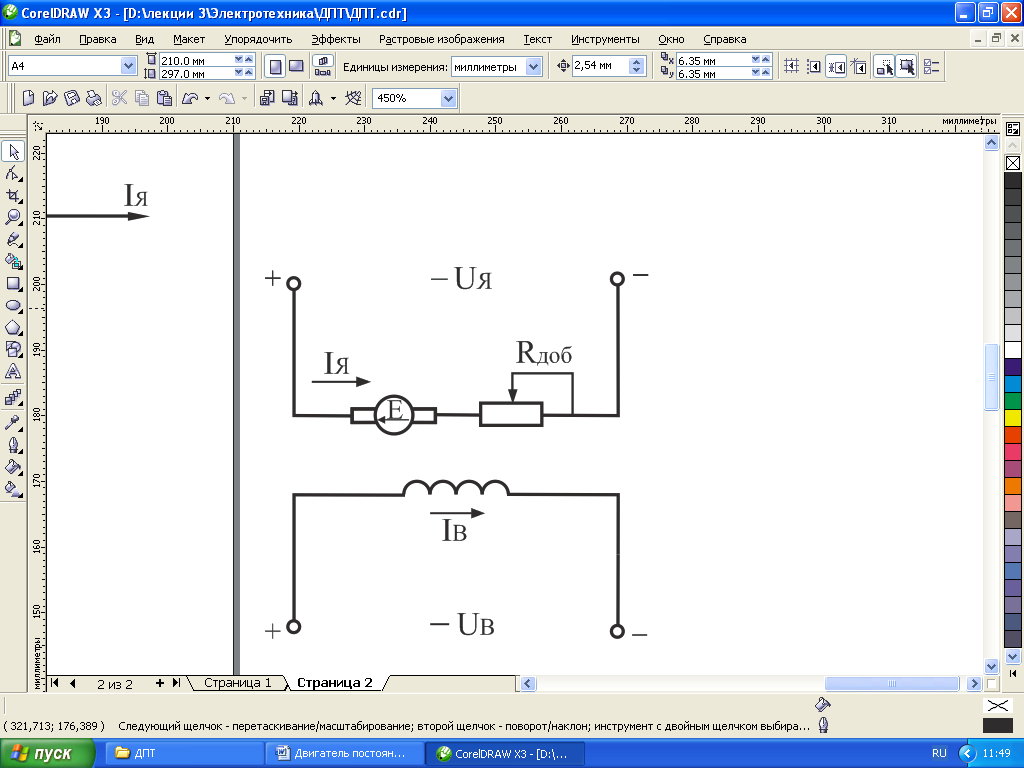
Esquemas DPT con varios tipos excitación:
Principio de funcionamiento:
UV → I V → F;
donde I V - corriente de excitación; I I - corriente de armadura.
La interacción de la corriente de armadura con el flujo magnético Ф del estator crea esfuerzo de torsión:
donde C M es el factor de diseño.
Bajo la acción de M, el rotor comienza a girar, mientras cruza las líneas de fuerza campo magnético, como resultado de lo cual se induce un EMF en él, que se denomina EMF de rotación:
Ecuaciones básicas de DPT:
Son las ecuaciones de equilibrio eléctrico del rotor:
donde es la caída de tensión en el circuito del inducido; es la FEM de rotación.
De esta fórmula obtenemos una relación prácticamente importante:
Sustituir en lugar de
Y obtenemos:
![]() .
.
De acuerdo con esta expresión, es posible construir una característica mecánica del DPT n \u003d f (M), dada la carga, es decir, M, puede encontrar la velocidad de rotación correspondiente. Si al mismo tiempo U = U nom, Ф = Ф nom tenemos una característica mecánica natural.
Característica mecánica de DPT:
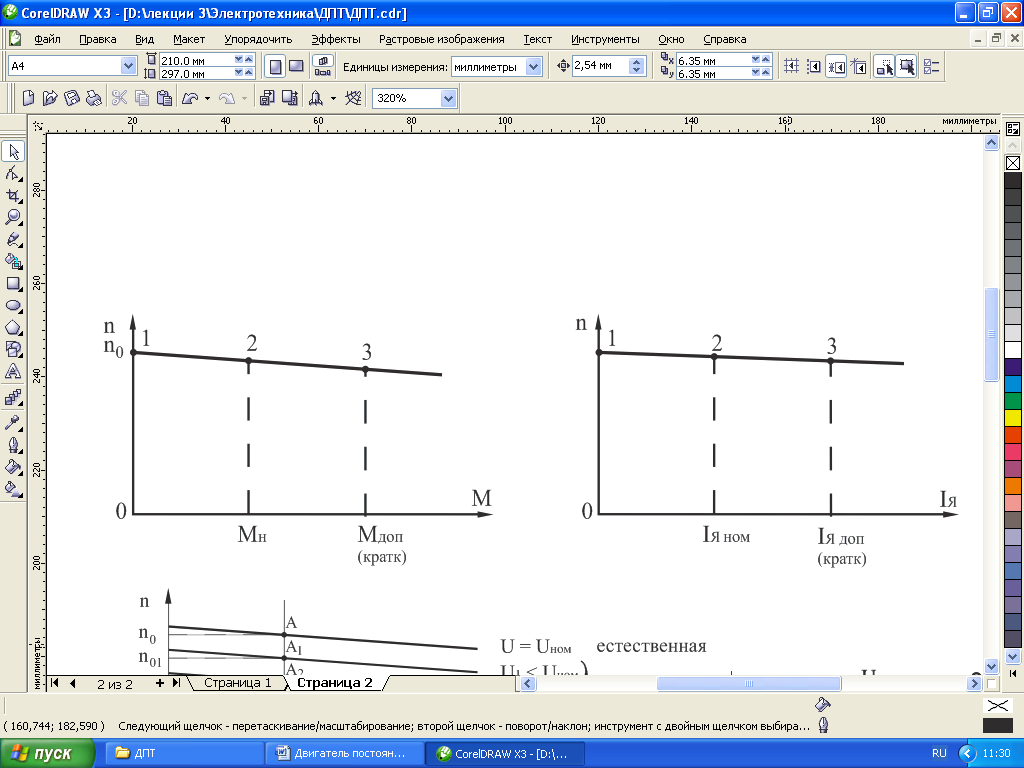
Punto "1" - ralentí; coordenadas М = 0, n = n 0 ;
"2" - modo nominal; coordenadas M n, n n;
"3" - carga máxima permitida a corto plazo.
Parcela 1–2: trabajo a largo plazo permitido.
Sección 2–3: solo se permite el trabajo a corto plazo.
Por lo general, agrego \u003d (2 ÷ 2.5) yo nom.
Control de velocidad TED:
![]() ,
,
donde es la resistencia de la cadena del ancla.
De dónde viene posibilidad de control de velocidad de tres maneras: , , .
1. Considere las características mecánicas artificiales en el control de velocidad, cambiando la entrada.
Obviamente, de acuerdo con las condiciones de funcionamiento del motor, es posible cambiar solo en la dirección de disminución y, por lo tanto, la velocidad del motor solo se puede ajustar hacia abajo, mientras que la velocidad de ralentí (punto "1") disminuye.
Las características tomarán la forma:
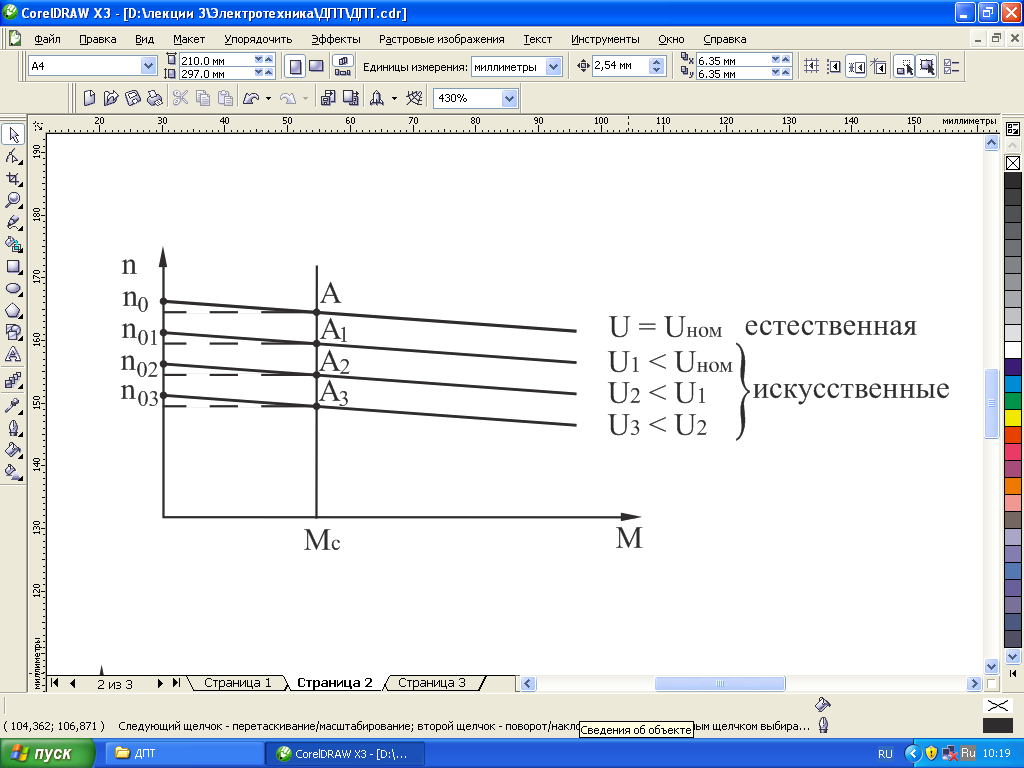
Si la carga en el motor está representada por la característica M C, al cambiar el voltaje de a puede obtener diferentes velocidades de n A a n A3.
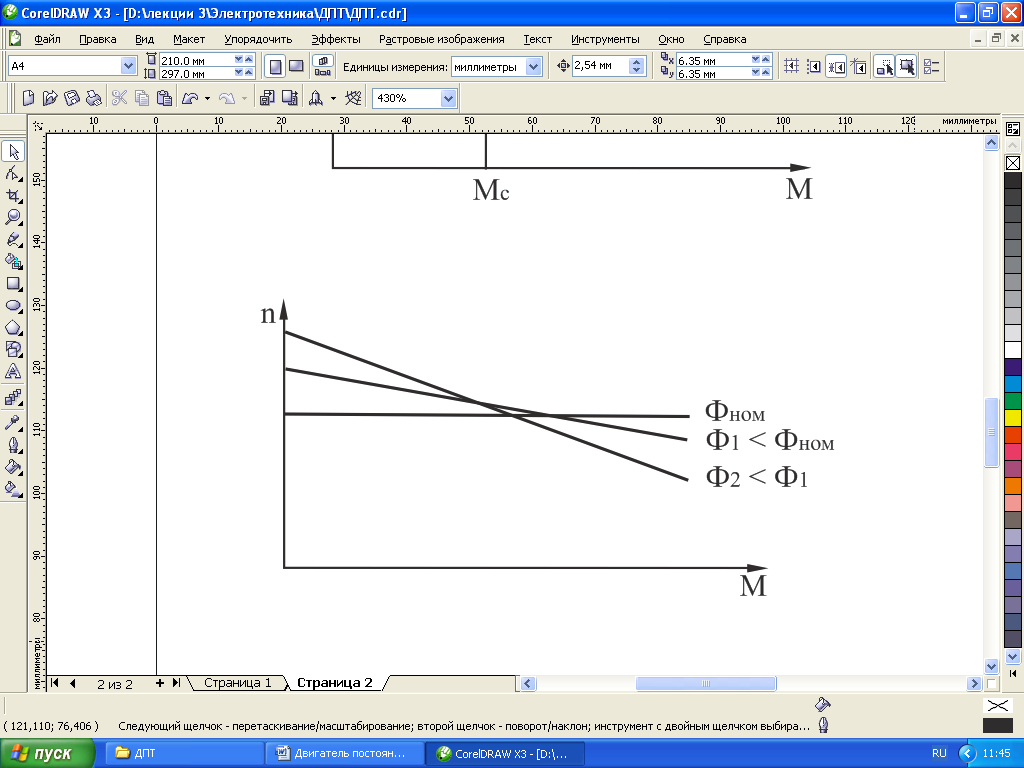
2. Control de velocidad por cambios en la magnitud del flujo magnético.
La magnitud del flujo magnético se puede cambiar usando la corriente I V, por ejemplo, un reóstato, solo en la dirección de disminución. Una disminución en el flujo magnético conducirá a un aumento en la velocidad. Por lo tanto, por medio del flujo magnético, la velocidad solo se puede ajustar hacia arriba.
3. Considere las características mecánicas en el control de velocidad, cambiando la resistencia de la cadena del ancla.
no depende de R n, por lo tanto las características artificiales tienen un punto en común.
La corriente de arranque cuando n = 0 y E = 0 tiene la forma y alcanza valores inaceptablemente grandes, lo que no permite arrancar el motor. Para reducir las corrientes de arranque, se introduce una resistencia adicional en el circuito del inducido:
La corriente disminuye y la característica tiene la forma:

Principio de operación (en el ejemplo de un motor excitación paralela). Si se aplica voltaje U al motor, entonces la corriente I c fluye a través del circuito de excitación y la corriente I i fluye a través del circuito de armadura. La corriente de excitación crea MMF F in = I in W in, que excita el flujo magnético en la máquina F in. La corriente de armadura, a su vez, crea un flujo magnético de la reacción de armadura F i. El flujo magnético resultante F res \u003d F in + F i.
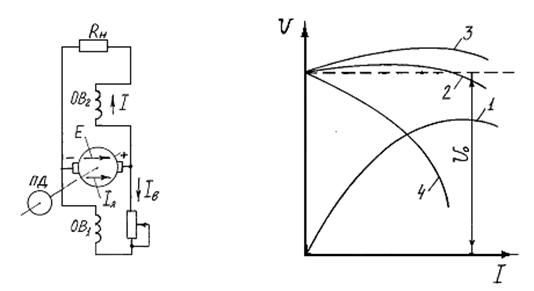
Figura 1.23 1.24
En el circuito de armadura, la corriente I i crea una caída de tensión R i I i. De acuerdo con la ley de la fuerza electromagnética EMC, cuando la corriente I I y el flujo magnético F res interactúan, se crea un par M BP. En estado estacionario M temp. \u003d M pr. Cuando los conductores de armadura cruzan el campo magnético F res, de acuerdo con la ley de inducción electromagnética EMP, se induce un EMF en ellos, que se dirige contra la tensión de red U.
Clasificación de motores. De acuerdo con el circuito para encender los devanados de excitación de los polos principales, los motores de CC se dividen en motores de excitación independiente, paralela, en serie y mixta.
en motores excitación independiente el devanado de excitación es alimentado por una fuente de voltaje de CC separada. En los motores de excitación en paralelo, el devanado de campo y el devanado del inducido están conectados en paralelo y reciben energía de la misma fuente. En los motores de excitación en serie y mixtos, hay un devanado de excitación conectado en serie con el devanado del inducido. En motores de baja potencia, el flujo de excitación se puede crear utilizando imanes permanentes. Los motores de excitación paralela y mixta encuentran la mayor aplicación.
Ecuaciones y magnitudes básicas que caracterizan los motores. Estos valores son: potencia mecánica en el eje P 2, voltaje de suministro U, corriente consumida de la red I, corriente de armadura I I, corriente de excitación I in, velocidad de rotación n, momento electromagnético Mamá. La relación entre estas cantidades se describe:
Ø ecuación de par electromagnético:
M em \u003d C m I I F;
Ø por la ecuación del estado eléctrico del circuito de armadura:
U \u003d E pr + R yo yo yo; (1.4)
E pr \u003d C E nФ;
Ø ecuación de momento:
M em \u003d M s + M sudor + M d,
donde M s es el momento de resistencia en el eje creado por la carga; M sudor: el momento de las pérdidas creadas por todo tipo de pérdidas en el motor; M d - momento dinámico creado por fuerzas de inercia;
Características de los motores. La más importante de las características es mecánica n (M s): la dependencia de la velocidad de rotación n del par en el eje (en adelante, se omite el índice "c") en U = const, I â = const. Muestra la influencia de la carga mecánica (par) en el eje del motor sobre la velocidad, lo que es especialmente importante saber al elegir y operar motores. Otras características del motor: ajuste n (I c), alta velocidad n (I i), trabajo M, R 1, n, I, h (R 2) - no se consideran en detalle aquí.
Las características mecánicas pueden ser naturales o artificiales. Por debajo natural por características se entienden las características tomadas en ausencia de resistencias adicionales en el circuito, por ejemplo, reóstatos en inducido o circuitos de excitación, artificial- en presencia de tales resistencias.
Ecuación mecánicacaracterísticas del motor. Se puede obtener de (1.1). Sustituimos en lugar de E su valor en (1.4), entonces
n \u003d (U - R yo yo yo) / C E F. (1.5)
Reemplazando I i con su valor de (1.2), obtenemos la ecuación características mecánicas:
n= ![]() (1.6)
(1.6)
El tipo de característica mecánica está determinado por la naturaleza de la dependencia del flujo de la carga del motor, que a su vez depende del circuito para encender el devanado de excitación.
Inversión del motor. Se entiende por inversión del motor un cambio en el sentido de giro de su inducido. Las posibles formas de invertir se derivan de la relación (1.2). Si cambia la dirección de la corriente de armadura o el flujo de la máquina, entonces cambia el signo y, por lo tanto, la dirección del par. En la práctica, esto se logra cambiando los cables o el devanado del inducido, o el devanado de excitación. Sin embargo, la conmutación simultánea de las salidas de ambos devanados o un cambio en la polaridad de la tensión que alimenta el motor (excepto en un motor de excitación independiente) no conduce a un cambio en el signo del par y, por lo tanto, a un cambio en la dirección de rotación.
Arrancando los motorescorriente continua. Hay dos requisitos principales para arrancar los motores: proporcionar el par necesario para arrancar y acelerar el inducido y evitar un flujo excesivo a través del inducido durante el arranque. alta corriente peligroso para el motor. En la práctica, son posibles tres métodos de arranque: arranque directo, arranque cuando se conecta un reóstato al circuito del inducido y arranque con bajo voltaje en la cadena del ancla.
Con el arranque directo, el circuito del inducido se conecta inmediatamente a la tensión máxima. Dado que en el primer momento de arranque, la armadura está estacionaria (n = 0), no hay fuerza contraelectromotriz (E pr = C E nF). Luego, de (1.4) se deduce que la corriente de arranque de la armadura I i, p \u003d U / R i.
Dado que R i \u003d 0.02 ¸ 1.10 Ohm, entonces I i, n \u003d (50 ¸ 100) I nom, lo cual es inaceptable. Por lo tanto, el arranque directo solo es posible para motores de baja potencia, donde I i, n (4¸6) I nom y la aceleración del motor dura menos de 1 s.
El inicio cuando el reóstato de inicio R p se enciende en serie con la armadura se considerará utilizando el ejemplo del circuito en la fig. 1.25. La corriente de arranque en este caso es:
Yo yo, p \u003d U / (R yo + R p). (1.7)
La resistencia R p \u003d U / I i, p - R i se elige de modo que en el momento inicial del arranque, cuando E pr \u003d 0, I i, p \u003d (1.4¸2.5) I nom (un número mayor se refiere a motores de menor potencia).
A medida que la armadura acelera, E pr aumenta, lo que reduce el voltaje en la armadura (es decir, el numerador (1.7) disminuye) y se emite la resistencia del reóstato R p.
Antes de comenzar, se muestra el reóstato R p, que es necesario para garantizar el flujo máximo y, por lo tanto, el par en el arranque (M p \u003d C m I I, p F). A medida que la armadura acelera, se introduce el reóstato R p hasta que se alcanza la velocidad requerida.
Es posible comenzar con una corriente de arranque limitada cuando la armadura del motor se alimenta desde una fuente separada (generador, rectificador) con voltaje ajustable. La limitación de la corriente de arranque y la suave aceleración del motor son proporcionadas por un aumento gradual en el voltaje del inducido desde cero hasta el valor requerido.
El método en consideración encuentra aplicación en sistemas de control y regulación de potentes motores de corriente continua (ver cláusula 1.14.3).
§ 115. CARACTERÍSTICAS DE LOS MOTORES DE CC
Las propiedades de trabajo de los motores están determinadas por sus características de desempeño, que son las dependencias del número de revoluciones t, torque Me, corriente consumida I, potencia P1 y eficiencia η sobre la potencia útil en el eje P2- Estas dependencias corresponden a la natural condiciones del motor, es decir, la máquina no está regulada y la tensión de red permanece constante. Asi que
como con un cambio en la potencia útil P2 (es decir, la carga en el eje), la corriente en la armadura también cambia
máquinas, las características de rendimiento a menudo se trazan como una función de la corriente de armadura. Las dependencias del par y la velocidad de rotación de la corriente en la armadura para el motor de excitación paralela se muestran en la fig. 152, y el diagrama de cien se muestra arriba (ver Fig. 151).
La velocidad del motor está determinada por la siguiente expresión:
> Con un aumento de la carga en el eje del motor, también aumenta la corriente en el inducido. Esto provoca un aumento en la caída de tensión a través de la resistencia del devanado del inducido y los contactos de las escobillas.
Dado que la corriente de excitación permanece constante (la máquina no está regulada), el flujo magnético también es constante. Sin embargo, con un aumento en la corriente en la armadura, el efecto desmagnetizador del flujo de reacción de la armadura aumenta y el flujo magnético Ф disminuye un poco. Un aumento en Iarya provoca una disminución en la velocidad del motor, y una disminución en Ф aumenta la velocidad. Por lo general, la caída de voltaje afecta el cambio de velocidad en una medida ligeramente mayor que la respuesta del inducido, de modo que a medida que aumenta la corriente del inducido, la velocidad disminuye. El cambio de velocidad de este tipo de motor es insignificante y no supera el 5% cuando la carga cambia de cero a nominal, es decir, los motores de excitación en paralelo tienen una característica de velocidad rígida.
Con un flujo magnético constante, la dependencia del par de la corriente en la armadura estará representada por una línea recta. Pero bajo la influencia

El par del motor de reacción del inducido con un aumento de la carga es una ligera disminución del flujo magnético y la dependencia del momento irá ligeramente por debajo de una línea recta.
El diagrama del motor de excitación secuencial se muestra en la fig. 153. El reóstato de arranque de este motor tiene solo dos abrazaderas, ya que el devanado de excitación y la armadura forman un circuito en serie. Las características del motor se muestran en la fig. 154. El número de revoluciones del motor de excitación secuencial se determina mediante la siguiente expresión:
![]()
donde rc es la resistencia del devanado de excitación en serie. En un motor de excitación en serie, el flujo magnético no permanece constante, sino que cambia drásticamente con los cambios de carga, lo que provoca un cambio significativo en la velocidad. Dado que la caída de tensión en la resistencia del inducido y en el devanado de campo es muy pequeña en comparación con la tensión aplicada, el número de revoluciones se puede determinar aproximadamente mediante la siguiente expresión:
Si despreciamos la saturación del acero, entonces podemos considerar el flujo magnético proporcional a la corriente en el devanado de campo, que es igual a la corriente en la armadura. En consecuencia, para un motor de excitación en serie, la velocidad de rotación es inversamente proporcional a la corriente en la armadura y el número de revoluciones disminuye bruscamente al aumentar la carga, es decir, el motor tiene una característica de velocidad suave. A medida que la carga disminuye, la velocidad del motor aumenta. En ralentí (Ia = 0), la velocidad del motor aumenta indefinidamente, es decir, el motor entra en sobremarcha.
Por lo tanto, una propiedad característica de los motores de excitación en serie es la inadmisibilidad del deslastre de carga, es decir, en ralentí o con cargas bajas. El motor tiene un minimo carga admisible, que es del 25-30% del nominal. Cuando la carga es inferior al mínimo permitido, la velocidad del motor aumenta bruscamente, lo que puede provocar su destrucción. Por lo tanto, cuando es posible el desprendimiento o la reducción abrupta de la carga, el uso de motores excitados en serie es inaceptable.
En motores muy pequeños, el deslastre de carga no provocará embalamiento, ya que las pérdidas mecánicas del motor serán suficientes. carga pesada para él.
El par del motor de excitación en serie, teniendo en cuenta la relación proporcional entre el flujo magnético y la corriente en la armadura (F \u003d C "Ia), se puede determinar mediante la siguiente expresión:
donde K'=KC'
aquellos. El torque es proporcional al cuadrado de la corriente. Sin embargo, a altas corrientes, la saturación del acero afecta y la dependencia del momento se aproxima a una línea recta. Así, los motores de este tipo desarrollan grandes pares a bajas velocidades, lo que es fundamental cuando se arrancan grandes masas inerciales y sobrecargas. Estos motores se utilizan ampliamente en aplicaciones de transporte y elevación.
Con excitación mixta, es posible la conexión tanto consonante como contraria de los devanados de excitación.
Los motores con devanados opuestos no se usan mucho, ya que tienen malas propiedades de arranque y son inestables.
Las características de velocidad de los motores de excitación mixta ocupan una posición intermedia entre las características de los motores de excitación en paralelo y en serie.
Con un aumento en la corriente del inducido, el número de revoluciones del inducido disminuye en mayor medida que para los motores de excitación en paralelo, debido a un aumento en el flujo magnético causado por un aumento en la corriente en el devanado de campo en serie. Cuando está inactivo, el motor de excitación mixta no se vuelve loco, ya que el flujo magnético no disminuye a cero debido a la presencia de un devanado de campo paralelo.
Con un aumento de carga en los motores de excitación mixta, el flujo magnético aumenta y el par aumenta en mayor medida que en los motores de excitación en paralelo, pero en menor medida que en los motores de excitación en serie.
1. El dispositivo de máquinas DC.
Las máquinas de CC, que pueden funcionar tanto como motor como generador, tienen una serie de ventajas. Al arrancar el motor, se genera un gran par de arranque. Por ello, este tipo de motores iroko se utilizan como tracción en los vehículos eléctricos. Los amplios límites y la suavidad del control de velocidad determinan el uso de motores de CC en una variedad de sistemas de control automático.
Los generadores de CC se utilizan para alimentar varias unidades de potencia (en particular, máquinas de soldadura de alta calidad).La potencia de las máquinas de CC es muy diferente:
desde unos pocos vatios hasta decenas de kilovatios. En el transporte se utilizan motores con un voltaje de 550 V y una potencia de 40 - 45 kW (tranvías), con un voltaje de 1500 V y una potencia de hasta 12 000 kW (locomotoras eléctricas). La eficiencia en las máquinas de corriente continua es mayor cuanto mayor es la potencia. Con potencia hasta 100 W eficiencia = 62%, con potencia hasta 100 kW eficiencia alcanza 91%. La desventaja de las máquinas de CC es la presencia de un conjunto de escobillas y colectores, que es uno de los componentes de la máquina menos fiables. Considere el dispositivo de la máquina de CC más simple:
1 - polos, generalmente representando una bobina con un núcleo,
2 - armadura (o rotor) - parte giratoria,
3 - conductores en las ranuras de la armadura.
La parte fija sobre la que se fijan los polos se llama estator o inductor. El inductor sirve para crear el campo magnético principal de la máquina. GN - neutro geométrico, una línea que pasa en el medio entre polos adyacentes.
La característica de diseño más importante de las máquinas de CC es la presencia de un conjunto de escobillas y colectores: 1 - escobilla, 2 - placa colectora. Las salidas de las secciones individuales del devanado del inducido son adecuadas para las placas colectoras. El grupo cepillo-recogedor realiza:
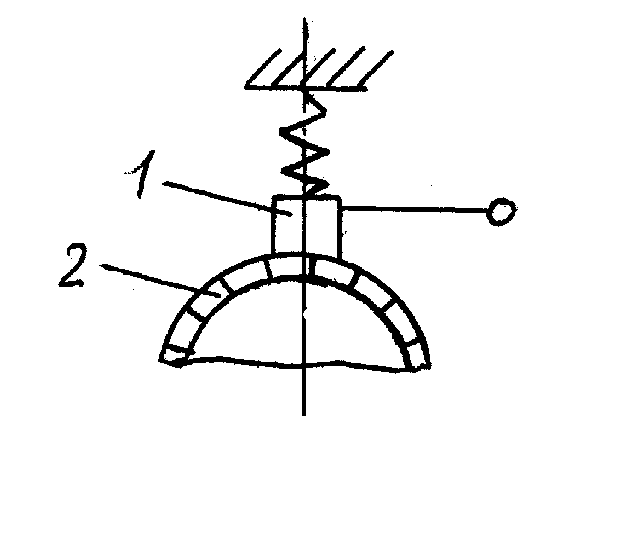
Contacto deslizante entre conductores exteriores fijos y secciones giratorias del devanado del inducido,
Rectificación de corriente en modo generador,
Conversión de corriente continua a corriente alterna (inversión) en modo motor.
Las máquinas de CC, como muchas otras máquinas eléctricas, son reversibles, es decir, la misma máquina puede funcionar como generador y como motor.
2. El principio de funcionamiento del generador y el motor.
En el modo generador, la armadura de la máquina gira bajo la influencia de un momento externo. Entre los polos del estator hay un flujo magnético constante que penetra en la armadura. Los conductores del devanado del inducido se mueven en un campo magnético y, por lo tanto, se induce en ellos una FEM, cuya dirección puede determinarse mediante la regla de la "mano derecha". En este caso, surge un potencial positivo en un cepillo en relación con el segundo. Si se conecta una carga a los terminales del generador, la corriente fluirá por ella. Después de girar la armadura en un cierto ángulo, las escobillas se conectarán a otro par de placas, es decir. conectado a otra vuelta del devanado del inducido, el EMF en el que tendrá la misma dirección. Así, el generador genera
corriente eléctrica, y la dirección de esta corriente que fluye a través de la carga no cambia.
Cuando la carga está conectada al generador y con la llegada de la corriente de armadura, se produce un par electromagnético en el eje, dirigido contra la dirección de rotación de la armadura. En modo motor, las mordazas de la máquina se suministran con presión constante, y la corriente fluye a través del devanado del inducido. Los conductores del devanado del inducido están en el campo magnético de la máquina creado por la corriente de excitación y, por tanto, sobre ellos, según la ley
Amperio, las fuerzas actuarán. La combinación de estas fuerzas crea un par, bajo cuya influencia girará la armadura. Cuando la armadura gira, se induce una FEM en su devanado, que se dirige hacia la corriente y, por lo tanto, en los motores se denomina FEM inversa.
3. Ecuaciones de par y fem del inducido.
Considere uno de los conductores en la ranura del inducido. Deje que se mueva (durante la rotación de la armadura) con una velocidad lineal V, luego se induce una FEM en este conductor:
E \u003d V cf l i V sin  ,
,
dónde \u003d 90, lа - la longitud de la parte activa de la armadura, V cf - la inducción promedio del campo magnético en el espacio.
Sea 2a el número de ramas paralelas. Dado que la EMF es igual a la EMF de una rama, podemos escribir:

donde E i es la FEM requerida del inducido, N es el número de todos los conductores del inducido.
donde Ф es el flujo magnético de un polo, y S es el área penetrada por este flujo, entonces

aquí p es el número de pares de polos (p = 1,2, ...).
La velocidad V se puede expresar en términos de la velocidad del inducido n:
Sustituyendo las expresiones resultantes en la fórmula para E i:

entonces finalmente obtenemos:
E i \u003d C E F n.
Se puede ver que la FEM de la armadura es proporcional a la frecuencia de rotación de la armadura y el flujo magnético de los polos. Usando la ley de Ampere, encontramos la fuerza con la que el campo de excitación actúa sobre un conductor de armadura:
F = V cf l yo yo pecado
,
aquí = 90 , I - corriente en el conductor.
Esta fuerza crea un par:
donde D es el diámetro de la armadura. Multiplicando por el número total de conductores N, obtenemos el momento total:
La inducción media In cf, como antes, la obtenemos dividiendo el flujo magnético de un polo por el área permeada por este flujo:
Dado que la corriente de armadura se propaga a lo largo de ramas paralelas, la corriente en un conductor está determinada por la expresión:

Sustituyendo las expresiones de B cf e I en la fórmula del momento general, obtenemos:

Si introducimos un coeficiente constructivo
entonces finalmente podemos escribir:
Como puede ver, el momento electromagnético de la máquina de CC es proporcional al flujo magnético de los polos y la corriente de armadura.

La fórmula de FEM de armadura Ea obtenida anteriormente da un valor promedio de la FEM. De hecho, su valor fluctúa (pulsos) entre dos valores límite: E min y E max. Cuando la armadura gira, parte de las vueltas, cortocircuitadas por las escobillas, se desconecta de las ramas paralelas, y durante el tiempo que la armadura gira en un ángulo correspondiente a una placa colectora, la suma de los valores EMF instantáneos tiene tiempo para cambiar un poco. El valor máximo de las pulsaciones EMF resultantes E = 0,5 (E max -E min) depende del número de placas colectoras. Por ejemplo, con un aumento en este número de 8 a 40, el valor de E disminuye de 4V a 0,16V.
4. Reacción de armadura en máquinas de corriente continua.
Cuando una máquina de CC está inactiva, el campo magnético es creado solo por los devanados de los polos. La aparición de corriente en los conductores del inducido bajo carga va acompañada de la aparición de un campo magnético del inducido. Dado que la dirección de las corrientes en los conductores entre las escobillas no cambia, el campo de la armadura giratoria es fijo en relación con las escobillas y los polos de excitación.
El devanado del inducido se vuelve análogo a un solenoide cuyo eje coincide con la línea de escobillas, por lo tanto, cuando las escobillas están instaladas en neutros geométricos, el flujo del inducido es transversal al flujo de excitación, y su efecto sobre este último se denomina reacción transversal del inducido. . Habiendo construido el vector del flujo resultante, vemos que ahora gira alrededor del eje geométrico de los polos principales. El campo de la máquina se vuelve asimétrico, los neutros físicos giran respecto a los geométricos. En el generador, se desplazan en la dirección de rotación de la armadura, en el motor, en contra de la dirección de rotación de la armadura.
Bajo el neutro físico entenderemos la línea que pasa por el centro de la armadura y el conductor del devanado de la armadura, en el que la FEM inducida por el flujo magnético resultante es cero. La reacción lateral del inducido tiene poco efecto sobre el rendimiento de la máquina, este efecto normalmente no se tiene en cuenta. Sin embargo, cuando las escobillas se desplazan del neutro geométrico, aparece una componente longitudinal en el flujo del inducido, su efecto sobre el flujo del polo se denomina reacción longitudinal del inducido. Puede ser de naturaleza tanto magnetizante como desmagnetizante. En general, la reacción del inducido provoca una distorsión del campo debajo de los polos y un cambio en el flujo de los polos. El primero puede causar un aumento significativo de chispas debajo de las escobillas (hasta la aparición de un incendio generalizado en el colector), y el segundo en el generador cambia el voltaje en los terminales, y en el motor el par y la velocidad del inducido. .
Para debilitar la reacción de la armadura, se aumenta el espacio de aire entre el estator y la armadura, se utilizan giros especiales en cortocircuito en las ranuras de las piezas polares. En máquinas de alta potencia, se utiliza un devanado de compensación especial para este fin. Se encaja en las ranuras de las piezas polares y se conecta en serie al circuito del inducido, su flujo equilibra el flujo longitudinal del inducido.





