เท่าที่แผนการ เรียบง่าย ตัวแปลงพัลส์ แรงดันคงที่.
ข้อได้เปรียบหลักของตัวแปลงพัลส์:
ประการแรกมีประสิทธิภาพสูงและประการที่สองสามารถทำงานที่แรงดันไฟฟ้าขาเข้าต่ำกว่าเอาท์พุท
ตัวแปลงพัลส์แบ่งออกเป็นกลุ่ม:
- - สเต็ปดาวน์, สเต็ปอัพ, พลิกกลับ;
- - เสถียรไม่เสถียร
- – แยกด้วยไฟฟ้า ไม่แยก;
- - ด้วยแรงดันไฟฟ้าขาเข้าที่แคบและกว้าง
สำหรับการผลิตพัลส์คอนเวอร์เตอร์แบบโฮมเมด เป็นการดีที่สุดที่จะใช้วงจรรวมแบบพิเศษ - ประกอบได้ง่ายกว่าและไม่แน่นอนเมื่อตั้งค่า
ตัวแปลงทรานซิสเตอร์ที่ไม่เสถียร
ตัวแปลงนี้ทำงานที่ความถี่ 50 กิโลเฮิรตซ์ หม้อแปลงไฟฟ้าแบบแยกส่วนด้วยไฟฟ้ามีให้โดยหม้อแปลง T1 ซึ่งพันบนวงแหวน K10x6x4.5 ที่ทำจากเฟอร์ไรท์ 2000NM และประกอบด้วย: ขดลวดปฐมภูมิ - 2x10 รอบ, ขดลวดทุติยภูมิ - 2x70 รอบของ PEV-0.2 ลวด. ทรานซิสเตอร์สามารถถูกแทนที่ด้วย KT501B กระแสไฟฟ้าจากแบตเตอรี่ในกรณีที่ไม่มีโหลดจะไม่ถูกใช้จริง

ตัวแปลงแรงดันไฟฟ้าทรานซิสเตอร์เสถียร
Transformer T1 พันบนวงแหวนเฟอร์ไรท์ที่มีเส้นผ่านศูนย์กลาง 7 มม. และมีขดลวด PEV 25 รอบ = 0.3 สองขดลวด
ตัวแปลงแรงดันไฟฟ้าที่ไม่เสถียรตามเครื่องมัลติไวเบรเตอร์
คอนเวอร์เตอร์ที่ไม่เสถียรแบบผลัก-ดึงโดยใช้เครื่องมัลติไวเบรเตอร์ (VT1 และ VT2) และเพาเวอร์แอมป์ (VT3 และ VT4) แรงดันขาออกจะถูกเลือกโดยจำนวนรอบของขดลวดทุติยภูมิของหม้อแปลงพัลส์ T1
ตัวแปลงบนชิปพิเศษ MAX631
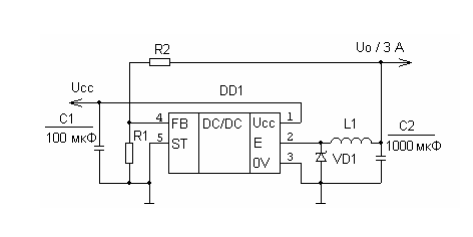
ตัวแปลงชนิดที่มีความเสถียรซึ่งใช้ชิป MAX631 จาก MAXIM ความถี่ในการสร้างคือ 40 ... 50 kHz องค์ประกอบการจัดเก็บคือ L1 choke
ตัวคูณแรงดันไฟฟ้าสองขั้นตอนที่ไม่ได้ควบคุมบน MAX660
คุณสามารถใช้ชิปตัวใดตัวหนึ่งแยกจากกัน ตัวอย่างเช่น ชิปตัวที่สอง เพื่อคูณแรงดันไฟฟ้าจากแบตเตอรี่สองก้อน
การสลับตัวควบคุมบูสต์บนชิป MAX1674
วงจรทั่วไปสำหรับการเปิดสวิตช์บูสต์เพิ่มความเสถียรบนชิป MAX1674 จาก MAXIM การทำงานจะถูกรักษาไว้ที่แรงดันไฟฟ้าขาเข้า 1.1 โวลต์ ประสิทธิภาพ - 94% กระแสโหลด - สูงถึง 200 mA
MCP1252-33X50: แรงดันไฟสองตัวจากแหล่งจ่ายไฟหนึ่งตัว
ช่วยให้คุณได้รับแรงดันไฟฟ้าเสถียรสองแบบที่แตกต่างกันด้วยประสิทธิภาพ 50 ... 60% และกระแสโหลดสูงสุด 150 mA ในแต่ละช่องสัญญาณ ตัวเก็บประจุ C2 และ C3 เป็นอุปกรณ์เก็บพลังงาน
การสลับสเต็ปอัพสเต็ปอัพบนชิป MAX1724EZK33 จาก MAXIM
วงจรทั่วไปสำหรับการเปิดไมโครเซอร์กิตเฉพาะจาก MAXIM ยังคงทำงานที่แรงดันไฟขาเข้า 0.91 โวลต์ มีแพ็คเกจ SMD ขนาดเล็กและให้กระแสโหลดสูงถึง 150 mA ด้วยประสิทธิภาพ 90%
การสลับตัวควบคุมบั๊กบนชิป TL497
วงจรทั่วไปสำหรับการเปิดสวิตช์ควบคุมบั๊กบนชิป TEXAS ที่มีจำหน่ายทั่วไป ตัวต้านทาน R3 ควบคุมแรงดันเอาต์พุตภายใน + 2.8 ... + 5 โวลต์ ตัวต้านทาน R1 ตั้งค่ากระแส ไฟฟ้าลัดวงจรซึ่งคำนวณโดยสูตร: Ikz (A) \u003d 0.5 / R1 (Ohm)

อินเวอร์เตอร์แรงดันไฟในตัวบนชิป ICL7660
อินเวอร์เตอร์แรงดันไฟฟ้าแบบบูรณาการประสิทธิภาพ - 98%
ตัวแปลงแยกสองตัวที่ใช้ชิป DC-102 และ DC-203
ตัวแปลงแรงดันไฟฟ้าแบบแยกสองตัว DA1 และ DA2 เชื่อมต่อตามวงจร "ไม่แยก" กับ "กราวด์" ทั่วไป

ตัวแปลงแรงดันไฟฟ้าแบบไบโพลาร์เสถียร
ตัวเหนี่ยวนำ ขดลวดปฐมภูมิหม้อแปลง T1 - 22 μH, อัตราส่วนของการหมุนของขดลวดปฐมภูมิต่อทุติยภูมิ - 1: 2.5
MAX734 ตัวแปลงเพิ่มความเสถียร
รูปแบบทั่วไปของตัวแปลงบูสต์ที่เสถียรบนชิป MAXIM
การใช้งานที่ไม่ได้มาตรฐานของชิป MAX232
ชิปนี้มักจะทำหน้าที่เป็นไดรเวอร์ RS-232 การคูณแรงดันได้มาจากปัจจัย 1.6 ... 1.8
ตลาดชีพจรจีน ตัวแปลง DC-DCค่อนข้างกว้าง และเมื่อเดินไปรอบ ๆ พื้นที่กว้างใหญ่ของ AliExpress ที่มีชื่อเสียงฉันเจอตัวแปลงขนาดเล็กราคาถูก แต่ในขณะเดียวกันก็ทรงพลังมาก ควรจะพูดทันทีว่าเพื่อวัตถุประสงค์ในการสื่อสาร ตัวมันเหมือนกับตัวแปลงพัลส์ใดๆ ก็ตาม มีข้อ จำกัด แต่ถึงกระนั้นก็สมควรได้รับความสนใจอย่างใกล้ชิดเพราะขนาดของมัน
ก่อนหน้านี้ ฉันได้เขียนเกี่ยวกับตัวแปลงพัลส์ต่าง ๆ ที่คุณสามารถใช้สำหรับโครงการของคุณ
แต่ทั้งหมดมีขนาดค่อนข้างใหญ่และไม่สะดวกในการใช้งานเสมอไป ฮีโร่ของรีวิวนี้มีขนาดกะทัดรัดกว่ามาก แต่ในขณะเดียวกันก็มีพารามิเตอร์ประสิทธิภาพที่คล้ายคลึงกัน บอร์ดคอนเวอร์เตอร์บรรจุในถุงป้องกันไฟฟ้าสถิตย์

ในลักษณะที่ปรากฏ ทารกดูไร้สาระมาก แต่อย่ารีบสรุป

ขนาดกระดาน 22 x 17 มม. เทียบกับเหรียญ 10 รูเบิล
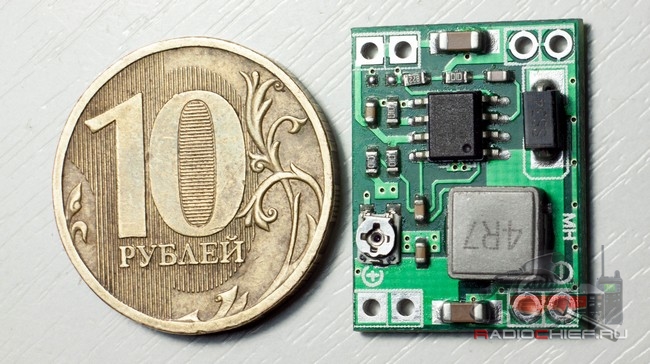
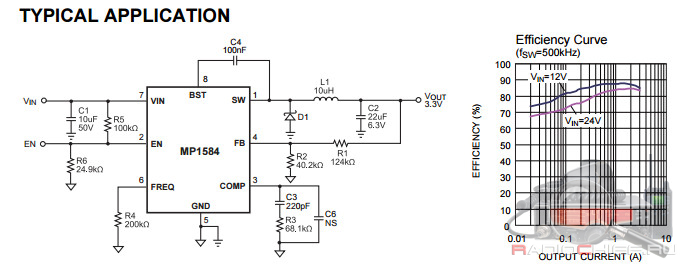
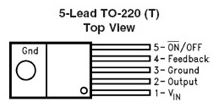
ตัวแปลงสัญญาณถูกสร้างขึ้นบนพื้นฐานของชิปตัวแปลงเฉพาะ MP1584 ซึ่งมีคุณสมบัติหลักดังนี้:
- แรงดันไฟฟ้าขาเข้าอาจแตกต่างกันตั้งแต่ 4.5 ถึง 28 โวลต์
- แรงดันไฟขาออกสามารถปรับได้ตั้งแต่ 0.8 ถึง 25 โวลต์
- FET ในตัวให้กระแสไฟในการทำงานสูงถึง 3A
- ความถี่ในการทำงานสูงถึง 1.5 MHz (ซึ่งจะอธิบายขนาดที่เล็กเช่นนี้)
- ป้องกันความร้อนสูงเกินไปในตัว (เมื่อถึง 120 องศาเซลเซียส ตัวแปลงจะปิด)
- ระลอกคลื่นต่ำเพียงพอที่อินพุตและเอาต์พุตของตัวแปลง
- เอาต์พุตป้องกันการลัดวงจร
จากข้อบกพร่อง เราสามารถสังเกตได้ว่าขาดการป้องกันการกลับขั้วอย่างสมบูรณ์ และถ้าคุณผสมขั้วโดยไม่ได้ตั้งใจ ชิป MP1584 จะระเบิดดังปัง (หนึ่งในตัวแปลงที่เสียชีวิตในนามของวิทยาศาสตร์) 🙂

แผนภาพการเดินสายไฟ MP1584 จากแผ่นข้อมูล อันที่จริงแล้วตัวแปลงของเราประกอบขึ้นตามนั้น นอกจากนี้ยังมีกราฟแสดงประสิทธิภาพตามกระแสที่บริโภค
แบบทดสอบ
เพื่อทดสอบตัวแปลง เราเชื่อมต่อสถานีวิทยุ M-Tech Legend III กับมัน

ตัวแปลงไฟฟ้านั้นใช้พลังงานจากแหล่งจ่ายไฟสำหรับห้องปฏิบัติการ Atten PPS3005S ที่สามารถส่งแรงดันไฟฟ้าได้สูงถึง 31 โวลต์และกระแสไฟสูงถึง 5A เราจะวัดกระแสและแรงดันโดยใช้มัลติมิเตอร์ Vichy VC8145
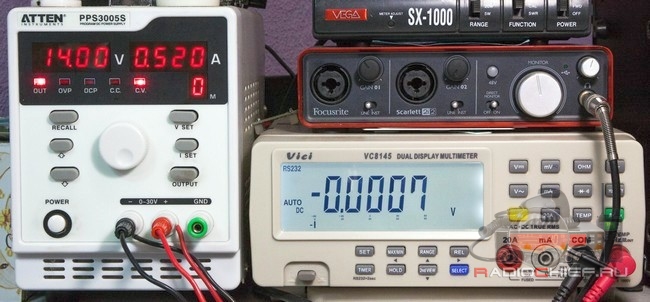
เราจะใช้พารามิเตอร์ก่อนและหลังตัวแปลง
ประสิทธิภาพของคอนเวอร์เตอร์ในแง่ของกำลังไฟฟ้าอยู่ที่ประมาณ 90% ซึ่งถือว่าใช้ได้ การสูญเสีย 10% เป็นมูลค่าที่ยอมรับได้ คุณต้องจำไว้ว่าประสิทธิภาพจะลดลงอย่างรวดเร็วเมื่อแรงดันอินพุตและเอาต์พุตน้อยกว่า 3V (ในเอกสารประกอบ น้อยกว่า 5) ดังนั้นประสิทธิภาพของลูกของเราจึงสูงกว่ารุ่นพี่ด้วยซ้ำ
มาวัดระดับการกระเพื่อมที่อินพุตและเอาต์พุตของตัวแปลงภายใต้โหลดมาตรฐานในรูปแบบของสถานีวิทยุ M-Tech Legend III เราจะตรวจสอบสัญญาณที่อินพุตและเอาต์พุตโดยใช้ออสซิลโลสโคป Atten ADS1102CAL พารามิเตอร์หลักภายใต้การศึกษาคือ dV (แอมพลิจูดของพัลส์ระหว่างเคอร์เซอร์ CurA และ CurB)
ระลอกที่อินพุต (แผนกต้อนรับ)
เอาท์พุต Ripple (รับ)
อินพุต Ripple (เกียร์)
ระลอกเอาต์พุต (เกียร์)
เมื่อเทียบกับตัวแปลงความถี่ต่ำที่คล้ายกันแต่ดูค่อนข้างดี
ระบอบอุณหภูมิ
เราตรวจสอบคอนเวอร์เตอร์เพื่อให้ความร้อนระหว่างการทำงาน
โหมดสแตนด์บายการบริโภคในปัจจุบัน 294mA

หลังจากส่ง 1 นาที ปริมาณการใช้ปัจจุบันคือ 1.55A
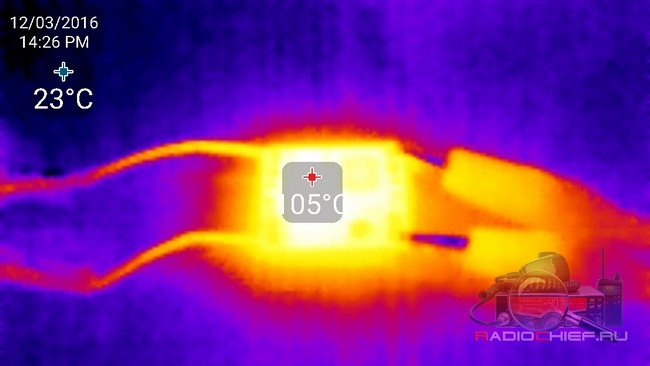
อย่างที่คุณเห็น ชิปตัวแปลงนั้นร้อนขึ้นมากที่สุด แน่นอนว่าลูกของเรามีช่วงเวลาที่ยากลำบาก แต่โดยทั่วไปแล้ว เขาผ่านการทดสอบ
การรบกวน
เอกสารประกอบสำหรับ MP1584 กล่าวว่า: การเปลี่ยนความถี่ที่ 1.5MHz ทำให้ MP1584 สามารถป้องกันปัญหาเสียงรบกวนของ EMI (Electromagnetic Interference) เช่นที่พบในวิทยุ AM และแอปพลิเคชัน ADSL ความหมายในการแปล: เนื่องจากการแปลงเกิดขึ้นที่ความถี่ 1.5 MHz MP1584 ไม่ควรสร้างสัญญาณรบกวนแม่เหล็กไฟฟ้าที่ทำให้เกิดปัญหาเมื่อตัวรับส่งสัญญาณใช้การมอดูเลตแอมพลิจูดและเทคโนโลยี ADSL จากประสบการณ์ของผม วิทยุ M-Tech Legend III เมื่อเชื่อมต่อผ่านตัวแปลงนี้ ไม่แสดงความไวที่ลดลงอย่างเห็นได้ชัด และเมื่อคำนึงถึงหลักการทำงานของพัลส์คอนเวอร์เตอร์ ฉันจะไม่แนะนำให้ใช้มันเพื่อจ่ายไฟให้กับอุปกรณ์สื่อสารที่มีความละเอียดอ่อน ขนาดที่กะทัดรัดของทรานสดิวเซอร์ช่วยให้วางได้แม้ในสถานี แต่ยังไม่ทราบว่าสิ่งนี้จะส่งผลเสียต่อความไวของเครื่องรับมากน้อยเพียงใด ควรมีการศึกษาเพิ่มเติมเพื่อตรวจสอบประเด็นนี้
ผล
เป็นผลให้เรามีตัวแปลงขนาดเล็กที่ยอดเยี่ยมที่สามารถใช้เพื่อจ่ายไฟให้กับอุปกรณ์ต่างๆ เช่น สร้างพาวเวอร์แบงค์บนแบตเตอรี่ตะกั่วที่จะชาร์จอุปกรณ์มือถือของคุณ เมื่อเร็ว ๆ นี้ ฉันเพิ่งมีงานประเภทเดียวกัน เพื่อเพิ่มพลังให้อุปกรณ์สำหรับการถ่ายภาพภาคสนาม เพื่อที่จะได้ไม่ต้องพึ่งพาแบตเตอรี่ที่อยู่ในอุปกรณ์มากนัก และคอนเวอร์เตอร์ของชิป MP1584 ก็รับมือกับงานนี้ได้อย่างสมบูรณ์แบบ
K1224PN1x - วงจรรวมเป็นตัวแปลง DC ต่ำไปเป็น AC สูงและใช้เพื่อควบคุมวงจร หลอดไฟนีออน. การเพิ่มแรงดันไฟฟ้าดำเนินการโดยใช้ตัวเหนี่ยวนำภายนอกซึ่งสร้างพัลส์แรงดันสูงที่ความถี่ของเครื่องกำเนิดปั๊มภายใน เฟสของแรงดันเอาต์พุตถูกควบคุมโดยเครื่องกำเนิดการสลับเฟส ความถี่ของเครื่องกำเนิดไฟฟ้าแต่ละเครื่องถูกกำหนดโดยความจุภายนอก IC ประกอบด้วย: self-oscillators สองตัวที่สร้างความถี่ปั๊มและช่วงการเปลี่ยน […]
ชิป 1156EU1 เป็นชุดขององค์ประกอบการทำงานที่ออกแบบมาเพื่อสร้างตัวควบคุมการสวิตชิ่งแบบบูสต์ สเต็ปดาวน์ หรืออินเวอร์ส อุปกรณ์ K1156EU1T ผลิตขึ้นในตัวเรือนโลหะเซรามิกประเภท 4112.16-3 และ KR1156EU1 ในตัวเรือนพลาสติกประเภท 283.16-2 คุณสมบัติ ออกแบบมาสำหรับเจ้าชู้ เพิ่มพลัง และพลิกกลับ สวิตช์ควบคุมการปรับแรงดันเอาต์พุต 1.25…40V เอาต์พุต แรงกระตุ้นในปัจจุบัน………..<1,5А Входное напряжение ….2,5…40В […]
K1290EKxx, K1290EF1xx เป็นตัวควบคุมแรงดันไฟฟ้าแบบสวิตชิ่งแบบสเต็ปดาวน์สำหรับโหลดสูงสุด 3A ออกแบบมาเพื่อทำงานในช่วงอุณหภูมิเคสที่ลบ 10 ... + 85 ° C (K1290ExxP) และลบ 60 ... + 125 ° C (K1290ExxX). แรงดันไฟขาออกคงที่: 3.3 V - K1290EK3.3 (A, B) P, K1290EK3.3X, 5 V - K1290EK5 (A, B) P, K1290EK5X, 12 V - K1290EK12 (A, B) P, 15 V - K1290EK15( A,B) คุณสมบัติ แรงดันไฟขาออกที่ตั้งโปรแกรมได้ตั้งแต่ 1.2 V ถึง […]
UA78S40 ของ Motorola และ LM78S40 ของ National Semionductor เป็นไอซีสำหรับตัวแปลงสวิตชิ่งเอนกประสงค์ ไมโครเซอร์กิต UA78S40 (LM78S40) ช่วยให้คุณสร้างบั๊ก เพิ่ม และแปลงคอนเวอร์เตอร์ที่มีความเสถียรของพัลส์กลับด้าน ตัวแปลงบนชิป UA78S40 มีแรงดันอินพุตและเอาต์พุตที่หลากหลาย แรงดันไฟฟ้าขาเข้าสามารถเปลี่ยนแปลงได้ตั้งแต่ 2.5 ถึง 40V แรงดันเอาต์พุตตั้งแต่ 1.5 ถึง 40V Schottky ไดโอด 1N5822 ใน […]
LM2576HV-ADJ ตัวควบคุมแรงดันไฟฟ้าแบบสวิตชิ่งแบบปรับได้ (Blow-Down Pulse Width (PWM) ตัวควบคุมแรงดันไฟฟ้าที่ปรับได้) มีช่วงแรงดันเอาต์พุตที่ปรับได้กว้างตั้งแต่ 1.2V ถึง 50V พร้อมกระแสไฟขาออกสูงสุด 3A เนื่องจากโคลงทำงานในโหมดพัลซิ่งจึงมีประสิทธิภาพสูงและมักจะติดตั้งหม้อน้ำขนาดเล็กที่มีพื้นที่ไม่เกิน 100 ซม. 2 อุปกรณ์มีการป้องกันความร้อนและ […]
รูปแสดงไดอะแกรมของตัวแปลงแรงดันไฟฟ้าอย่างง่าย CD4047 IC ทำงานในโหมดมัลติไวเบรเตอร์ที่ไม่เสถียรจากเอาต์พุตซึ่งในแอนติเฟสสัญญาณจะไปที่ทรานซิสเตอร์ IRFZ44 MOSFET ซึ่งเป็นโหลดปกติ (หม้อแปลงเครือข่ายที่มีขดลวดเชื่อมต่อในทางกลับกันโดยที่ขดลวด 220 กลายเป็นทุติยภูมิ ) หม้อแปลงไฟฟ้าสเต็ปอัพ 60-100W พร้อมขดลวดปฐมภูมิ 2 * 12V และต๊าปจากตรงกลาง
IC CAT3603 ให้กระแสไฟ 30 mA ต่อช่องสัญญาณ และทำงานด้วยแรงดันไฟขาเข้า 3 ... 5.5V การใช้กระแสไฟที่นิ่งของไมโครเซอร์กิตมีขนาดเล็กมาก 0.1 mA ซึ่งทำให้สามารถจ่ายไฟให้กับแบตเตอรี่ทั่วไปได้ ความถี่ในการแปลงการทำงาน 1MHz ประสิทธิภาพตัวแปลง 90% มีการป้องกันเอาต์พุตจากการลัดวงจร กระแสไฟขาออกของไมโครเซอร์กิตถูกควบคุมโดยใช้ความต้านทาน R ตารางแสดงค่าความต้านทานขึ้นอยู่กับ […]

ตัวแปลงความถี่
นับตั้งแต่ช่วงปลายทศวรรษที่ 1960 ตัวแปลงความถี่ได้เปลี่ยนแปลงไปอย่างมาก ส่วนใหญ่เป็นผลมาจากการพัฒนาเทคโนโลยีไมโครโปรเซสเซอร์และเซมิคอนดักเตอร์ตลอดจนเนื่องจากต้นทุนที่ลดลง
อย่างไรก็ตาม หลักการพื้นฐานของตัวแปลงความถี่ยังคงเหมือนเดิม
โครงสร้างของตัวแปลงความถี่ประกอบด้วยสี่องค์ประกอบหลัก:
ข้าว. 1. ไดอะแกรมบล็อกตัวแปลงความถี่
1. วงจรเรียงกระแสจะสร้างแรงดันไฟฟ้ากระแสตรงเป็นจังหวะเมื่อเชื่อมต่อกับแหล่งจ่ายไฟกระแสสลับแบบเฟสเดียว/สามเฟส วงจรเรียงกระแสมีสองประเภทหลัก - มีการจัดการและไม่มีการจัดการ
2. สายโซ่กลางของหนึ่งในสามประเภท:
ก) การแปลงแรงดันของวงจรเรียงกระแสให้เป็นกระแสตรง
b) ทำให้แรงดันไฟฟ้ากระแสตรงคงที่หรือปรับให้เรียบและจ่ายให้กับอินเวอร์เตอร์
c) การแปลงแรงดัน DC คงที่ของวงจรเรียงกระแสให้เป็นแรงดันไฟ AC ที่แตกต่างกัน
3. Inverter ซึ่งสร้างความถี่ของแรงดันไฟฟ้าของมอเตอร์ไฟฟ้า อินเวอร์เตอร์บางตัวสามารถแปลงแรงดันไฟฟ้ากระแสตรงคงที่เป็นแรงดันไฟฟ้ากระแสสลับแบบแปรผันได้
4. วงจรควบคุมอิเล็กทรอนิกส์ที่ส่งสัญญาณไปยังวงจรเรียงกระแส วงจรกลาง และอินเวอร์เตอร์ และรับสัญญาณจากองค์ประกอบเหล่านี้ การสร้างองค์ประกอบควบคุมขึ้นอยู่กับการออกแบบตัวแปลงความถี่เฉพาะ (ดูรูปที่ 2.02)
ตัวแปลงความถี่ทั่วไปคือวงจรควบคุมทั้งหมดควบคุมองค์ประกอบเซมิคอนดักเตอร์ของอินเวอร์เตอร์ ตัวแปลงความถี่ต่างกันในโหมดสวิตชิ่งที่ใช้ควบคุมแรงดันไฟฟ้าของมอเตอร์
ในรูป 2 ซึ่งแสดงหลักการสร้าง / การควบคุมคอนเวอร์เตอร์ต่างๆ โดยใช้สัญกรณ์ต่อไปนี้:
1 - วงจรเรียงกระแสควบคุม
2- วงจรเรียงกระแสที่ไม่มีการควบคุม,
3- วงจรกลางของกระแสตรงที่เปลี่ยนแปลง
4- วงจรระดับกลางของแรงดันคงที่DC
5- วงจรกลางของกระแสตรงที่เปลี่ยนแปลง
6- อินเวอร์เตอร์ที่มีการมอดูเลตแอมพลิจูดพัลส์ (AIM)
7- อินเวอร์เตอร์พร้อมการปรับความกว้างพัลส์ (PWM)
อินเวอร์เตอร์ปัจจุบัน (IT) (1+3+6)
ตัวแปลงที่มีการมอดูเลตแอมพลิจูด-พัลส์ (AIM) (1+4+7) (2+5+7)
ตัวแปลง PWM (PWM/VVCplus) (2+4+7)

ข้าว. 2. หลักการต่างๆ ในการสร้าง/ควบคุมเครื่องแปลงความถี่
เพื่อความสมบูรณ์ควรกล่าวถึงตัวแปลงโดยตรงซึ่งไม่มีวงจรกลาง ตัวแปลงดังกล่าวใช้ในช่วงกำลังไฟฟ้าเมกะวัตต์เพื่อสร้างแรงดันไฟฟ้าความถี่ต่ำจากแหล่งจ่ายไฟหลัก 50 Hz โดยตรง ในขณะที่ความถี่เอาต์พุตสูงสุดจะอยู่ที่ประมาณ 30 Hz
วงจรเรียงกระแส
แรงดันไฟฟ้าของแหล่งจ่ายไฟหลักเป็นแรงดันไฟฟ้ากระแสสลับสามเฟสหรือเฟสเดียวที่มีความถี่คงที่ (เช่น 3x400V/50Hz หรือ 1x240V/50Hz) ลักษณะของแรงดันไฟฟ้าเหล่านี้แสดงไว้ในรูปด้านล่าง
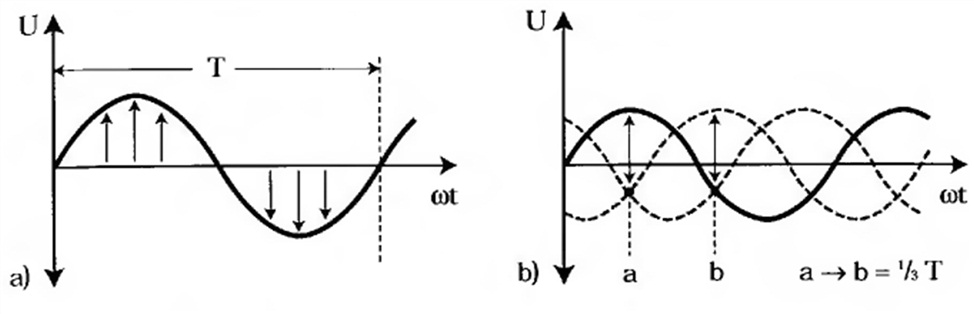
ข้าว. 3. แรงดันไฟฟ้ากระแสสลับแบบเฟสเดียวและสามเฟส
ในรูป ทั้งสามเฟสจะเปลี่ยนจากกันตามเวลา แรงดันเฟสเปลี่ยนทิศทางอย่างต่อเนื่อง และความถี่ระบุจำนวนคาบต่อวินาที ความถี่ 50 Hz หมายความว่ามี 50 คาบต่อวินาที (50 x T) เช่น ช่วงเวลาหนึ่งใช้เวลา 20 มิลลิวินาที
วงจรเรียงกระแสของเครื่องแปลงความถี่ถูกสร้างขึ้นบนไดโอดหรือไทริสเตอร์หรือรวมกัน ไม่สามารถควบคุมวงจรเรียงกระแสที่สร้างขึ้นบนไดโอดและควบคุมไทริสเตอร์ หากใช้ทั้งไดโอดและไทริสเตอร์ วงจรเรียงกระแสจะถูกควบคุมแบบกึ่งควบคุม
วงจรเรียงกระแสที่ไม่สามารถควบคุมได้
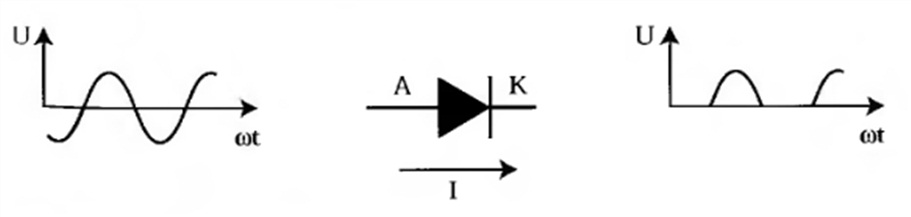
ข้าว. 4. โหมดการทำงานของไดโอด
ไดโอดยอมให้กระแสไหลในทิศทางเดียวเท่านั้น: จากแอโนด (A) ถึงแคโทด (K) เช่นเดียวกับอุปกรณ์เซมิคอนดักเตอร์อื่นๆ ไม่สามารถควบคุมปริมาณกระแสไดโอดได้ แรงดันไฟฟ้ากระแสสลับจะถูกแปลงโดยไดโอดเป็นแรงดันไฟฟ้ากระแสตรงแบบพัลซิ่ง หากวงจรเรียงกระแสสามเฟสที่ไม่สามารถควบคุมได้นั้นมาพร้อมกับแรงดันไฟฟ้ากระแสสลับสามเฟส แรงดันไฟฟ้ากระแสตรงก็จะเต้นเป็นจังหวะด้วยในกรณีนี้

ข้าว. 5. วงจรเรียงกระแสที่ไม่สามารถควบคุมได้
ในรูป 5 แสดงวงจรเรียงกระแสสามเฟสที่ไม่มีการควบคุมซึ่งมีไดโอดสองกลุ่ม กลุ่มหนึ่งประกอบด้วยไดโอด D1, D3 และ D5 อีกกลุ่มประกอบด้วยไดโอด D2, D4 และ D6 ไดโอดแต่ละตัวนำกระแสไฟเป็นเวลาหนึ่งในสามของรอบเวลา (120 °) ในทั้งสองกลุ่ม ไดโอดนำกระแสในลำดับที่แน่นอน ช่วงเวลาที่ทั้งสองกลุ่มทำงานสลับกันไปมาระหว่างกัน 1/6 ของช่วงเวลา T (60°)
ไดโอด D1,3,5 เปิด (นำไฟฟ้า) เมื่อใช้แรงดันบวกกับพวกมัน หากแรงดันไฟฟ้าของเฟส L ถึงค่าพีคที่เป็นบวก ไดโอด D จะเปิดและขั้ว A จะได้รับแรงดันไฟฟ้าของเฟส L1 ไดโอดอีกสองตัวจะได้รับผลกระทบจากแรงดันย้อนกลับของ U L1-2 และ U L1-3
สิ่งเดียวกันนี้เกิดขึ้นในกลุ่มไดโอด D2,4,6 ในกรณีนี้ ขั้ว B ได้รับแรงดันเฟสลบ หากในขณะที่เฟส L3 ถึงค่าลบที่ จำกัด แสดงว่าไดโอด D6 เปิดอยู่ (ดำเนินการ) ไดโอดอื่นทั้งสองได้รับผลกระทบจากแรงดันย้อนกลับของ U L3-1 และ UL3-2
แรงดันไฟขาออกของวงจรเรียงกระแสที่ไม่มีการควบคุมจะเท่ากับความต่างศักย์ระหว่างไดโอดทั้งสองกลุ่ม ค่าเฉลี่ยของแรงดันไฟกระแสตรงแบบกระเพื่อมคือ 1.35 x แรงดันไฟหลัก
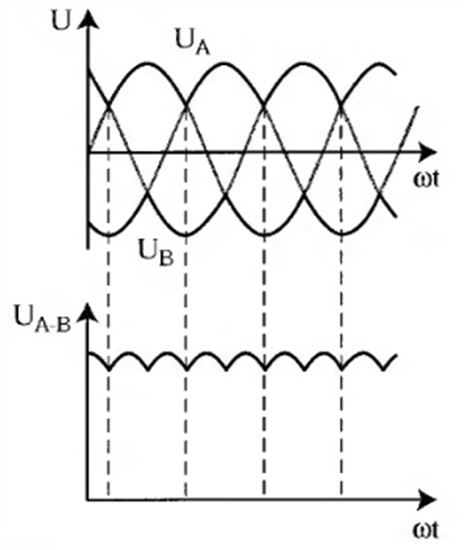
ข้าว. 6. แรงดันไฟขาออกของวงจรเรียงกระแสสามเฟสที่ไม่มีการควบคุม
วงจรเรียงกระแสควบคุม
ในวงจรเรียงกระแสแบบควบคุม ไดโอดจะถูกแทนที่ด้วยไทริสเตอร์ เช่นเดียวกับไดโอด ไทริสเตอร์จะส่งกระแสไปในทิศทางเดียวเท่านั้น - จากแอโนด (A) ถึงแคโทด (K) อย่างไรก็ตาม ตรงกันข้ามกับไดโอด ไทริสเตอร์มีอิเล็กโทรดที่สามเรียกว่า "เกท" (G) เพื่อให้ไทริสเตอร์เปิดได้ จะต้องส่งสัญญาณไปที่เกท ถ้ากระแสไหลผ่านไทริสเตอร์ ไทริสเตอร์จะส่งผ่านจนกว่ากระแสจะกลายเป็นศูนย์
กระแสไม่สามารถถูกขัดจังหวะโดยใช้สัญญาณไปที่เกต ไทริสเตอร์ใช้ทั้งในวงจรเรียงกระแสและอินเวอร์เตอร์
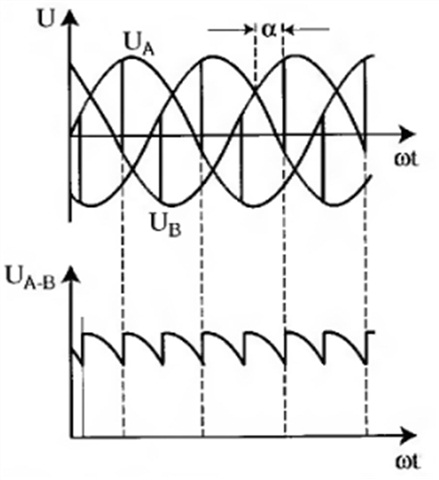
สัญญาณควบคุม a ถูกนำไปใช้กับเกตของไทริสเตอร์ ซึ่งมีลักษณะการหน่วงเวลาที่แสดงเป็นองศา องศาเหล่านี้ทำให้เกิดความล่าช้าระหว่างช่วงเวลาที่แรงดันไฟฟ้าผ่านศูนย์และเวลาที่ไทริสเตอร์เปิดอยู่

ข้าว. 7. โหมดการทำงานของไทริสเตอร์
หากมุม a อยู่ในช่วงตั้งแต่ 0° ถึง 90° วงจรไทริสเตอร์จะถูกใช้เป็นวงจรเรียงกระแส และหากอยู่ในช่วงตั้งแต่ 90° ถึง 300° แสดงว่าเป็นอินเวอร์เตอร์
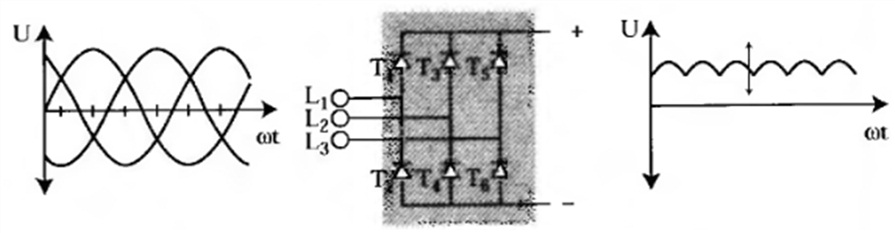
ข้าว. 8. วงจรเรียงกระแสสามเฟสควบคุม
วงจรเรียงกระแสที่ควบคุมนั้นโดยพื้นฐานแล้วเหมือนกับวงจรเรียงกระแสที่ไม่มีการควบคุม ยกเว้นว่าไทริสเตอร์ถูกควบคุมโดยสัญญาณและเริ่มดำเนินการตั้งแต่ช่วงเวลาที่ไดโอดธรรมดาเริ่มดำเนินการ จนถึงช่วงเวลาที่ 30 °หลังจากจุดข้ามแรงดันเป็นศูนย์ .
การปรับค่า a ช่วยให้คุณสามารถเปลี่ยนขนาดของแรงดันไฟฟ้าที่แก้ไขได้ วงจรเรียงกระแสที่ควบคุมจะสร้างแรงดันไฟฟ้าคงที่ ค่าเฉลี่ยคือ 1.35 x แรงดันไฟหลัก x cos α
ข้าว. 9. แรงดันไฟขาออกของวงจรเรียงกระแสสามเฟสควบคุม
เมื่อเทียบกับวงจรเรียงกระแสที่ไม่มีการควบคุม วงจรเรียงกระแสแบบควบคุมจะมีการสูญเสียที่สำคัญกว่าและทำให้เกิดสัญญาณรบกวนที่สูงกว่าในเครือข่ายแหล่งจ่ายไฟ เนื่องจากไทริสเตอร์ใช้เวลาผ่านไปที่สั้นกว่า วงจรเรียงกระแสจะดึงกระแสปฏิกิริยาจากเครือข่ายมากขึ้น
ข้อดีของวงจรเรียงกระแสแบบควบคุมคือความสามารถในการคืนพลังงานไปยังเครือข่ายอุปทาน
โซ่กลาง
วงจรกลางถือได้ว่าเป็นที่เก็บซึ่งมอเตอร์ไฟฟ้าสามารถรับพลังงานผ่านอินเวอร์เตอร์ได้ ขึ้นอยู่กับวงจรเรียงกระแสและอินเวอร์เตอร์ มีหลักการออกแบบวงจรกลางที่เป็นไปได้สามประการ
อินเวอร์เตอร์ - แหล่งกระแส (1 ตัวแปลง)
ข้าว. 10. วงจรกลางของกระแสตรงแปรผัน
ในกรณีของอินเวอร์เตอร์ - แหล่งกระแส วงจรระดับกลางประกอบด้วยขดลวดเหนี่ยวนำขนาดใหญ่และเชื่อมต่อกับวงจรเรียงกระแสที่ควบคุมเท่านั้น ตัวเหนี่ยวนำแปลงแรงดันไฟฟ้าของวงจรเรียงกระแสที่เปลี่ยนไปเป็นกระแสไฟตรงที่เปลี่ยนแปลง แรงดันมอเตอร์ถูกกำหนดโดยโหลด
อินเวอร์เตอร์ - แหล่งจ่ายแรงดัน (U-converters)

ข้าว. 11. วงจรแรงดันไฟฟ้ากระแสตรงระดับกลาง
ในกรณีของอินเวอร์เตอร์แหล่งจ่ายแรงดันไฟฟ้า วงจรระดับกลางคือตัวกรองที่มีตัวเก็บประจุและสามารถเชื่อมต่อกับวงจรเรียงกระแสทั้งสองประเภทใดก็ได้ ตัวกรองจะทำให้แรงดัน DC แบบเร้าใจ (U21) ของเครื่องเรียงกระแสเรียบขึ้น
ในวงจรเรียงกระแสแบบควบคุม แรงดันไฟฟ้าที่ความถี่ที่กำหนดจะคงที่และจ่ายให้กับอินเวอร์เตอร์เป็นแรงดันคงที่ที่แท้จริง (U22) ที่มีแอมพลิจูดต่างกัน
ในวงจรเรียงกระแสที่ไม่มีการควบคุม แรงดันไฟฟ้าที่อินพุตของอินเวอร์เตอร์คือแรงดันคงที่พร้อมแอมพลิจูดคงที่
วงจรระดับกลางของแรงดันไฟฟ้ากระแสตรงแบบแปรผัน
ข้าว. 12. วงจรระดับกลางของแรงดันไฟฟ้าที่แตกต่างกัน
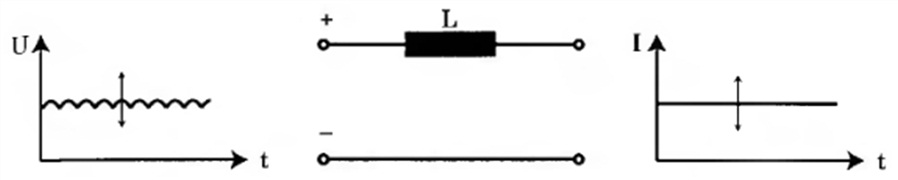
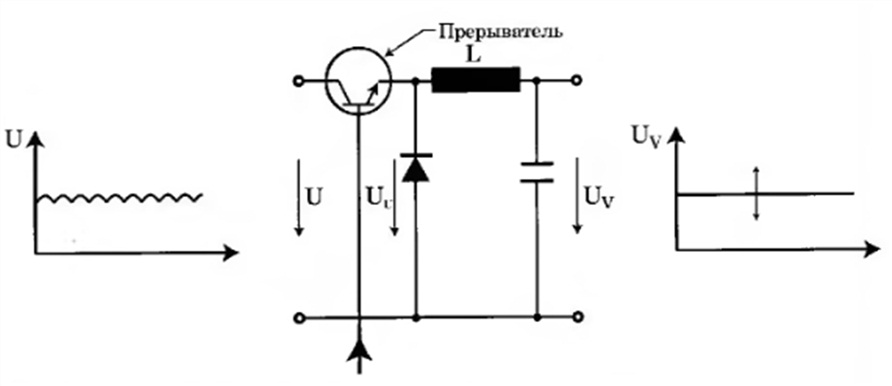
ในวงจรระดับกลางที่มีแรงดันไฟตรงต่างกัน คุณสามารถเปิดเครื่องสับที่ด้านหน้าของตัวกรองดังแสดงในรูปที่ 12.
เบรกเกอร์ประกอบด้วยทรานซิสเตอร์ที่ทำหน้าที่เป็นสวิตช์ เปิดและปิดแรงดันไฟฟ้าของวงจรเรียงกระแส ระบบควบคุมควบคุมเครื่องบดสับโดยเปรียบเทียบแรงดันไฟที่เปลี่ยนหลังตัวกรอง (U v) กับสัญญาณอินพุต หากมีความแตกต่างกัน อัตราส่วนจะถูกปรับโดยการเปลี่ยนเวลาที่ทรานซิสเตอร์เปิดและเวลาปิด สิ่งนี้จะเปลี่ยนค่าประสิทธิผลและขนาดของแรงดันคงที่ซึ่งสามารถแสดงได้โดยสูตร
U v \u003d U x t เปิด / (t เปิด + t ปิด)
เมื่อทรานซิสเตอร์ขัดขวางการเปิดวงจรปัจจุบัน ตัวเหนี่ยวนำตัวกรองจะทำให้แรงดันไฟฟ้าข้ามทรานซิสเตอร์มีขนาดใหญ่มาก เพื่อหลีกเลี่ยงปัญหานี้ เบรกเกอร์ได้รับการป้องกันโดยไดโอดสวิตชิ่งแบบเร็ว เมื่อทรานซิสเตอร์เปิดและปิดดังแสดงในรูปที่ 13 แรงดันไฟฟ้าจะสูงสุดในโหมด 2
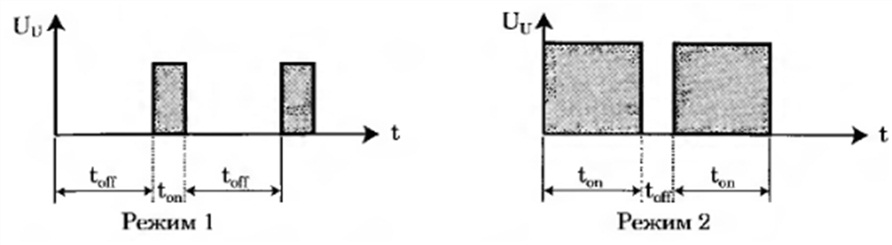
ข้าว. 13. เบรกเกอร์ทรานซิสเตอร์ควบคุมแรงดันไฟฟ้าของวงจรกลาง
ตัวกรองวงจรกลางทำให้คลื่นสี่เหลี่ยมเรียบหลังเบรกเกอร์ ตัวเก็บประจุกรองและตัวเหนี่ยวนำรักษาแรงดันไฟฟ้าให้คงที่ที่ความถี่ที่กำหนด
วงจรระดับกลางอาจทำหน้าที่เพิ่มเติมทั้งนี้ขึ้นอยู่กับการก่อสร้าง ซึ่งรวมถึง:
การแยกวงจรเรียงกระแสจากอินเวอร์เตอร์
ลดระดับของฮาร์โมนิก
การจัดเก็บพลังงานเพื่อจำกัดการกระชากของโหลดที่ไม่ต่อเนื่อง
อินเวอร์เตอร์
อินเวอร์เตอร์เป็นลิงค์สุดท้ายในตัวแปลงความถี่ก่อนมอเตอร์ไฟฟ้าและตำแหน่งที่มีการปรับแรงดันเอาต์พุตขั้นสุดท้าย
ตัวแปลงความถี่ให้สภาวะการทำงานปกติตลอดช่วงการควบคุมทั้งหมด โดยการปรับแรงดันเอาต์พุตให้อยู่ในโหมดโหลด วิธีนี้ช่วยให้คุณรักษาแรงแม่เหล็กของมอเตอร์ได้ดีที่สุด
จากวงจรระดับกลาง อินเวอร์เตอร์จะได้รับ
กระแสตรงแบบแปรผัน,
แรงดันไฟ DC ที่แตกต่างกันหรือ
แรงดัน DC คงที่
ต้องขอบคุณอินเวอร์เตอร์ ในแต่ละกรณี ค่าที่เปลี่ยนแปลงจะถูกส่งไปยังมอเตอร์ไฟฟ้า กล่าวอีกนัยหนึ่ง ความถี่ที่ต้องการของแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์ไฟฟ้าจะถูกสร้างขึ้นในอินเวอร์เตอร์เสมอ หากกระแสหรือแรงดันแปรผัน อินเวอร์เตอร์จะสร้างเฉพาะความถี่ที่ต้องการเท่านั้น หากแรงดันไฟฟ้าคงที่ อินเวอร์เตอร์จะสร้างทั้งความถี่ที่ต้องการและแรงดันไฟฟ้าที่ต้องการสำหรับมอเตอร์
แม้ว่าอินเวอร์เตอร์จะทำงานต่างกันไป แต่โครงสร้างพื้นฐานของอินเวอร์เตอร์ก็เหมือนกันเสมอ องค์ประกอบหลักของอินเวอร์เตอร์คืออุปกรณ์เซมิคอนดักเตอร์ควบคุมที่เชื่อมต่อเป็นคู่ในสามสาขา
ปัจจุบันไทริสเตอร์ส่วนใหญ่ถูกแทนที่ด้วยทรานซิสเตอร์ความถี่สูงซึ่งสามารถเปิดและปิดได้อย่างรวดเร็ว ความถี่สวิตชิ่งมักจะอยู่ระหว่าง 300 Hz ถึง 20 kHz ขึ้นอยู่กับเซมิคอนดักเตอร์ที่ใช้
อุปกรณ์เซมิคอนดักเตอร์ในอินเวอร์เตอร์จะเปิดและปิดโดยสัญญาณที่สร้างโดยวงจรควบคุม สามารถสร้างสัญญาณได้หลายวิธี
ข้าว. 14. เครื่องแปลงกระแสไฟฟ้าวงจรกลางแบบธรรมดาที่มีแรงดันไฟฟ้าแปรผัน
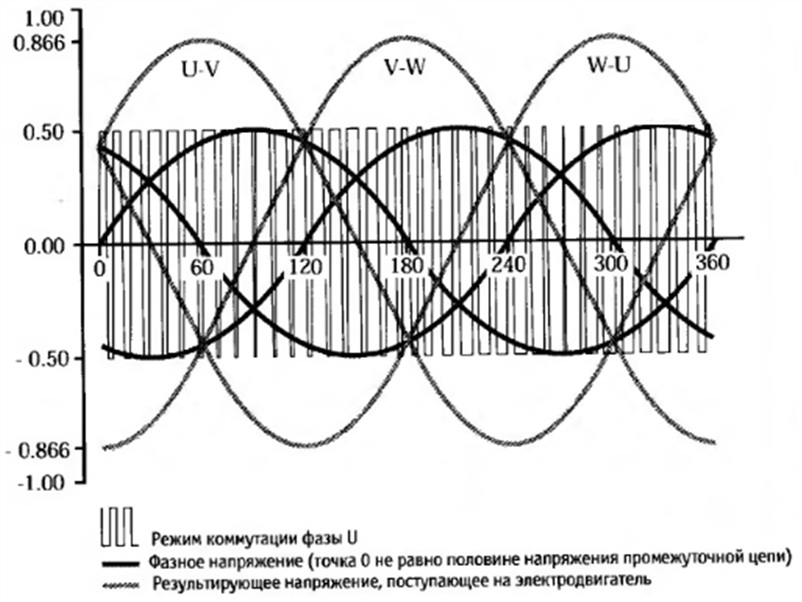
อินเวอร์เตอร์ทั่วไปซึ่งส่วนใหญ่เปลี่ยนกระแสวงจรกลางของแรงดันไฟฟ้าที่เปลี่ยนแปลงประกอบด้วยไทริสเตอร์หกตัวและตัวเก็บประจุหกตัว
ตัวเก็บประจุช่วยให้ไทริสเตอร์เปิดและปิดในลักษณะที่กระแสในขดลวดเฟสถูกเลื่อน 120 องศาและต้องปรับให้เข้ากับขนาดมอเตอร์ เมื่อกระแสถูกนำไปใช้กับขั้วมอเตอร์เป็นระยะในลำดับ U-V, V-W, W-U, U-V... สนามแม่เหล็กหมุนเป็นระยะของความถี่ที่ต้องการจะถูกสร้างขึ้น แม้ว่ากระแสของมอเตอร์จะเกือบเป็นคลื่นสี่เหลี่ยม แต่แรงดันของมอเตอร์ก็จะเกือบเป็นไซนัส อย่างไรก็ตาม เมื่อกระแสไฟถูกเปิดหรือปิด แรงดันไฟกระชากจะเกิดขึ้นเสมอ
ตัวเก็บประจุแยกจากกระแสโหลดของมอเตอร์ด้วยไดโอด
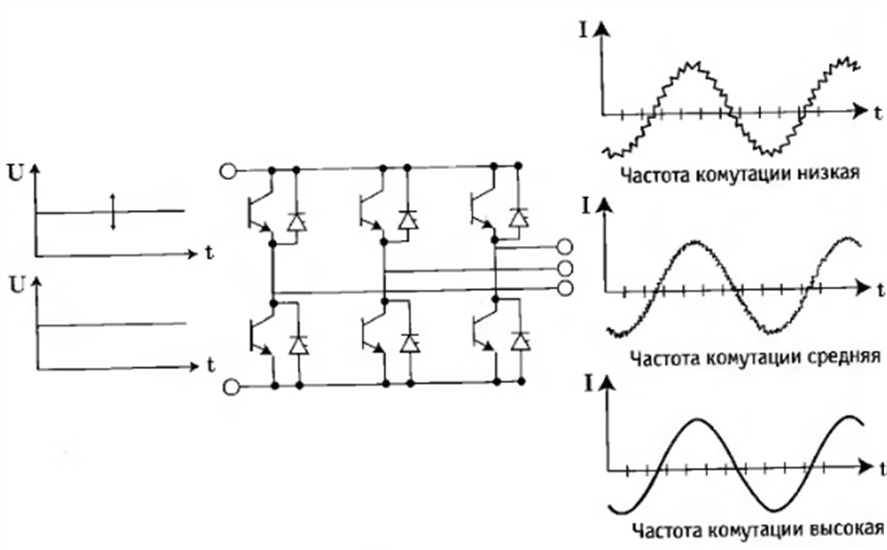
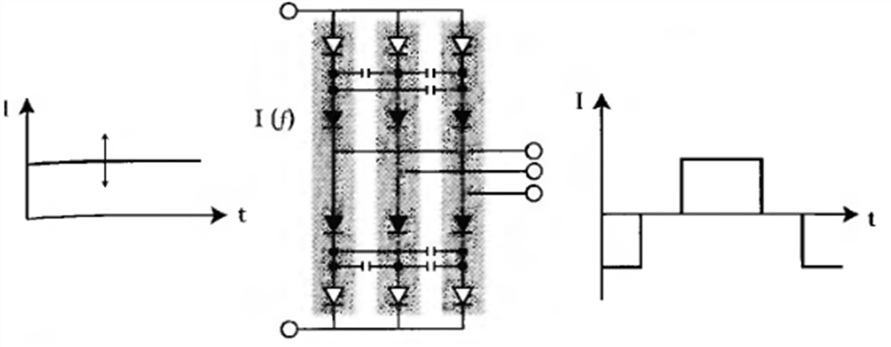
ข้าว. 15. อินเวอร์เตอร์สำหรับการเปลี่ยนแปลงหรือแรงดันวงจรกลางคงที่และการพึ่งพากระแสไฟขาออกบนความถี่สวิตชิ่งของอินเวอร์เตอร์
อินเวอร์เตอร์ที่มีแรงดันไฟฟ้าวงจรกลางแบบแปรผันหรือคงที่ประกอบด้วยองค์ประกอบการสลับหกตัวและไม่ว่าจะใช้อุปกรณ์เซมิคอนดักเตอร์ประเภทใดก็ทำงานได้เกือบเหมือนกัน วงจรควบคุมจะเปิดและปิดอุปกรณ์เซมิคอนดักเตอร์โดยใช้วิธีการมอดูเลตต่างๆ หลายวิธี ซึ่งจะเป็นการเปลี่ยนความถี่เอาต์พุตของตัวแปลงความถี่
วิธีแรกคือการเปลี่ยนแรงดันหรือกระแสในวงจรกลาง
ช่วงเวลาระหว่างที่เซมิคอนดักเตอร์แต่ละตัวเปิดอยู่จะถูกจัดเรียงตามลำดับที่ใช้เพื่อให้ได้ความถี่เอาต์พุตที่ต้องการ
ลำดับการสลับของอุปกรณ์เซมิคอนดักเตอร์นี้ควบคุมโดยขนาดของแรงดันไฟที่เปลี่ยนแปลงหรือกระแสของวงจรระดับกลาง ด้วยการใช้ออสซิลเลเตอร์ที่ควบคุมด้วยแรงดันไฟฟ้า ความถี่จะติดตามแอมพลิจูดของแรงดันไฟฟ้าเสมอ การควบคุมอินเวอร์เตอร์ประเภทนี้เรียกว่าการปรับความกว้างพัลส์ (PAM)
สำหรับแรงดันไฟฟ้าวงจรกลางคงที่จะใช้วิธีการพื้นฐานอื่น แรงดันไฟฟ้าของมอเตอร์จะแปรผันโดยการใช้แรงดันไฟฟ้าวงจรกลางกับขดลวดของมอเตอร์เป็นระยะเวลานานขึ้นหรือสั้นลง
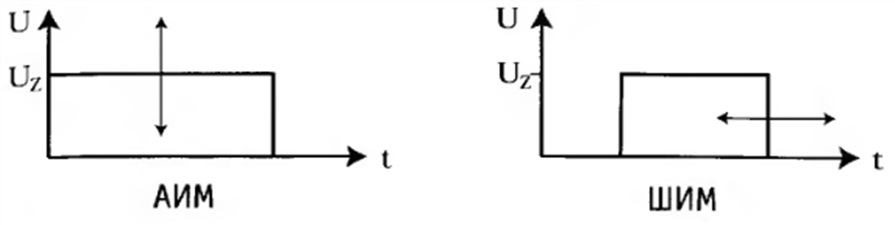
ข้าว. 16 แอมพลิจูดและการปรับความกว้างพัลส์
ความถี่มีการเปลี่ยนแปลงโดยการเปลี่ยนพัลส์แรงดันไฟฟ้าตามแกนเวลา - ในเชิงบวกในช่วงครึ่งรอบหนึ่งและทางลบในอีกด้านหนึ่ง
เนื่องจากวิธีนี้เปลี่ยนระยะเวลา (ความกว้าง) ของพัลส์แรงดันไฟฟ้า จึงเรียกว่าการปรับความกว้างพัลส์ (PWM) การมอดูเลต PWM (และวิธีการที่เกี่ยวข้อง เช่น PWM ที่ควบคุมด้วยไซน์) เป็นวิธีที่ใช้กันทั่วไปในการขับเคลื่อนอินเวอร์เตอร์
ด้วยการมอดูเลต PWM วงจรควบคุมจะกำหนดเวลาการสลับของอุปกรณ์เซมิคอนดักเตอร์ที่จุดตัดของแรงดันฟันเลื่อยและแรงดันอ้างอิงไซน์ที่ซ้อนทับ (PWM ที่ควบคุมด้วยไซน์) วิธีการมอดูเลต PWM ที่น่าสนใจอื่น ๆ คือวิธีการมอดูเลตความกว้างพัลส์ที่ปรับเปลี่ยน เช่น WC และ WC plus ที่พัฒนาโดย Danfoss Corporation
ทรานซิสเตอร์
เนื่องจากทรานซิสเตอร์สามารถสลับที่ความเร็วสูง การรบกวนทางแม่เหล็กไฟฟ้าที่เกิดขึ้นเมื่อ "การเต้นเป็นจังหวะ" (การทำให้เป็นแม่เหล็กของมอเตอร์) จะลดลง
ข้อดีอีกประการของความถี่สวิตชิ่งสูงคือความยืดหยุ่นในการปรับแรงดันเอาต์พุตของตัวแปลงความถี่ ซึ่งช่วยให้สามารถผลิตกระแสมอเตอร์ไซน์ได้ ในขณะที่วงจรควบคุมจำเป็นต้องเปิดและปิดทรานซิสเตอร์อินเวอร์เตอร์เท่านั้น
ความถี่สวิตชิ่งของอินเวอร์เตอร์เป็นดาบสองคม เนื่องจากความถี่สูงสามารถนำไปสู่การทำความร้อนของมอเตอร์และยอดไฟฟ้าแรงสูงได้ ยิ่งความถี่สวิตชิ่งสูง ความสูญเสียก็จะยิ่งสูงขึ้น
ในทางกลับกัน ความถี่สวิตชิ่งที่ต่ำอาจส่งผลให้เกิดเสียงอะคูสติกที่ดังมาก
ทรานซิสเตอร์ความถี่สูงสามารถแบ่งออกเป็นสามกลุ่มหลัก:
ทรานซิสเตอร์สองขั้ว (LTR)
มอสเฟตแบบขั้วเดียว (MOS-FET)
ทรานซิสเตอร์ไบโพลาร์เกตหุ้มฉนวน (IGBTs)
ปัจจุบันทรานซิสเตอร์ IGBT มีการใช้กันอย่างแพร่หลายมากที่สุด เนื่องจากเป็นการรวมคุณสมบัติการขับเคลื่อนของทรานซิสเตอร์ MOS-FET เข้ากับคุณสมบัติเอาท์พุตของทรานซิสเตอร์ LTR นอกจากนี้ยังมีช่วงกำลังไฟฟ้าที่เหมาะสม การนำไฟฟ้าที่เหมาะสม และความถี่ในการเปลี่ยน ซึ่งช่วยลดความยุ่งยากในการควบคุมเครื่องแปลงความถี่ที่ทันสมัย
ในกรณีของ IGBT ทั้งองค์ประกอบของอินเวอร์เตอร์และตัวควบคุมอินเวอร์เตอร์จะอยู่ในโมดูลแบบหล่อที่เรียกว่า "Intelligent Power Module" (IPM)
การปรับความกว้างของพัลส์ (AIM)
การมอดูเลตพัลส์แอมพลิจูดใช้สำหรับตัวแปลงความถี่ที่มีแรงดันไฟฟ้าวงจรระดับกลางต่างกัน
ในตัวแปลงความถี่ที่มีวงจรเรียงกระแสที่ไม่มีการควบคุม แอมพลิจูดของแรงดันไฟขาออกจะถูกสร้างขึ้นโดยตัวตัดวงจรระดับกลาง และหากวงจรเรียงกระแสถูกควบคุม แอมพลิจูดจะได้รับโดยตรง
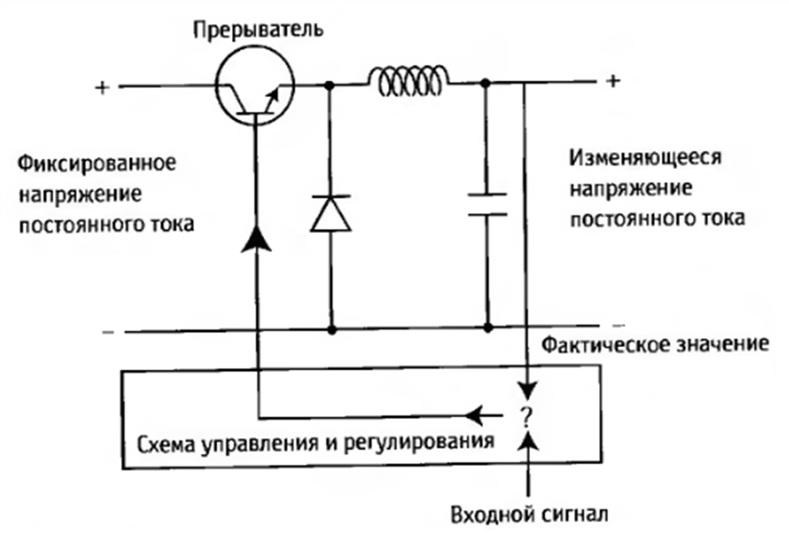
ข้าว. 20. การสร้างแรงดันไฟฟ้าในตัวแปลงความถี่พร้อมเบรกเกอร์ในวงจรกลาง
ทรานซิสเตอร์ (เบรกเกอร์) ในรูปที่ 20 ถูกปลดล็อคหรือล็อคโดยวงจรควบคุมและควบคุม เวลาในการเปลี่ยนขึ้นอยู่กับค่าเล็กน้อย (สัญญาณอินพุต) และสัญญาณแรงดันไฟฟ้าที่วัดได้ (ค่าจริง) ค่าจริงวัดจากตัวเก็บประจุ
ตัวเหนี่ยวนำและตัวเก็บประจุทำหน้าที่เป็นตัวกรองที่ทำให้ระลอกคลื่นแรงดันไฟฟ้าเรียบ แรงดันไฟสูงสุดขึ้นอยู่กับเวลาเปิดของทรานซิสเตอร์ และหากค่าเล็กน้อยและค่าจริงแตกต่างกัน เบรกเกอร์จะทำงานจนกว่าจะถึงระดับแรงดันที่ต้องการ
การควบคุมความถี่
ความถี่ของแรงดันไฟขาออกจะเปลี่ยนแปลงโดยอินเวอร์เตอร์ในช่วงเวลาดังกล่าว และอุปกรณ์สวิตช์เซมิคอนดักเตอร์จะทำงานหลายครั้งในช่วงเวลาดังกล่าว
ระยะเวลาของช่วงเวลาสามารถปรับได้สองวิธี:
1. ป้อนโดยตรงหรือ
2.ใช้แรงดันไฟฟ้ากระแสตรงแปรผันตามสัดส่วนของสัญญาณอินพุต

ข้าว. 21ก. การควบคุมความถี่ด้วยแรงดันไฟฟ้าวงจรกลาง
การปรับความกว้างพัลส์เป็นวิธีที่พบได้บ่อยที่สุดในการสร้างแรงดันไฟฟ้าสามเฟสด้วยความถี่ที่เหมาะสม
ด้วยการมอดูเลตความกว้างพัลส์ การก่อตัวของแรงดันไฟฟ้าทั้งหมดของวงจรระดับกลาง (≈ √2 x U mains) ถูกกำหนดโดยระยะเวลาและความถี่ในการเปลี่ยนขององค์ประกอบกำลัง อัตราการทำซ้ำของพัลส์ PWM ระหว่างการเปิดและปิดเป็นตัวแปรและช่วยให้สามารถควบคุมแรงดันไฟฟ้าได้
มีสามตัวเลือกหลักสำหรับการตั้งค่าโหมดการสลับในอินเวอร์เตอร์ที่ควบคุมโดยการปรับความกว้างพัลส์
1. PWM . ควบคุมด้วยไซนัส
2. PWM แบบซิงโครนัส
3.PWM แบบอะซิงโครนัส
แต่ละสาขาของอินเวอร์เตอร์ PWM สามเฟสสามารถมีสถานะที่แตกต่างกันสองสถานะ (เปิดและปิด)
สวิตช์สามตัวสร้างชุดสวิตช์ที่เป็นไปได้แปดชุด (2 3) และด้วยเวกเตอร์แรงดันไฟฟ้าแบบดิจิทัลแปดตัวที่เอาต์พุตของอินเวอร์เตอร์หรือบนขดลวดสเตเตอร์ของมอเตอร์ที่เชื่อมต่อ ดังแสดงในรูป 21b, เวกเตอร์เหล่านี้ 100, 110, 010, 011, 001, 101 อยู่ที่มุมของรูปหกเหลี่ยมที่ล้อมรอบ โดยใช้เวกเตอร์ 000 และ 111 เป็นศูนย์
![]()
ในกรณีของการรวมสวิตชิ่ง 000 และ 111 ศักย์เดียวกันจะถูกสร้างขึ้นที่เทอร์มินัลเอาท์พุตทั้งสามของอินเวอร์เตอร์ - ไม่ว่าจะเป็นค่าบวกหรือค่าลบที่เกี่ยวข้องกับวงจรระดับกลาง (ดูรูปที่ 21c) สำหรับมอเตอร์ไฟฟ้า นี่หมายถึงผลกระทบที่ใกล้กับไฟฟ้าลัดวงจรของขั้ว แรงดันไฟฟ้า 0 V ยังใช้กับขดลวดของมอเตอร์
PWM . ควบคุมด้วยไซนัส
ด้วย PWM ที่ควบคุมด้วยคลื่นไซน์ แรงดันอ้างอิงไซน์ (เรา) ถูกใช้เพื่อขับเคลื่อนเอาต์พุตของอินเวอร์เตอร์แต่ละตัว ระยะเวลาของคาบของแรงดันไซน์นั้นสอดคล้องกับความถี่พื้นฐานที่ต้องการของแรงดันเอาต์พุต แรงดันฟันเลื่อย (UD) ใช้กับแรงดันอ้างอิงสามตัว ดูรูปที่ 22.

ข้าว. 22. หลักการทำงานของ PWM ที่ควบคุมด้วยไซน์ (ที่มีแรงดันอ้างอิงสองตัว)
เมื่อแรงดันฟันเลื่อยและแรงดันอ้างอิงไซน์ตัดกัน อุปกรณ์เซมิคอนดักเตอร์ของอินเวอร์เตอร์จะเปิดหรือปิด
ทางแยกถูกกำหนดโดยองค์ประกอบอิเล็กทรอนิกส์ของแผงควบคุม หากแรงดันฟันเลื่อยมากกว่าแรงดันไซน์ เมื่อแรงดันฟันเลื่อยลดลง พัลส์เอาต์พุตจะเปลี่ยนจากบวกเป็นลบ (หรือจากลบเป็นบวก) เพื่อให้แรงดันเอาต์พุตของตัวแปลงความถี่ถูกกำหนดโดยแรงดันวงจรกลาง .
แรงดันไฟขาออกจะแปรผันตามอัตราส่วนระหว่างระยะเวลาของสถานะเปิดและปิด และอัตราส่วนนี้สามารถเปลี่ยนแปลงได้เพื่อให้ได้แรงดันไฟฟ้าที่ต้องการ ดังนั้นแอมพลิจูดของพัลส์แรงดันลบและบวกจะสอดคล้องกับแรงดันไฟฟ้าครึ่งหนึ่งของวงจรกลางเสมอ
ข้าว. 23. แรงดันเอาต์พุตของ PWM . ที่ควบคุมด้วยไซน์
ที่ความถี่สเตเตอร์ต่ำ เวลาปิดจะเพิ่มขึ้นและอาจนานจนไม่สามารถรักษาความถี่ของแรงดันไฟฟ้าของฟันเลื่อยได้
ซึ่งจะเป็นการเพิ่มระยะเวลาที่ไม่มีแรงดันไฟฟ้า และมอเตอร์จะทำงานไม่สม่ำเสมอ เพื่อหลีกเลี่ยงปัญหานี้ คุณสามารถเพิ่มความถี่ของแรงดันไฟฟ้าฟันเลื่อยได้เป็นสองเท่าที่ความถี่ต่ำ
แรงดันเฟสที่ขั้วเอาท์พุตของตัวแปลงความถี่สอดคล้องกับครึ่งหนึ่งของแรงดันวงจรกลางหารด้วย √2 นั่นคือ เท่ากับครึ่งหนึ่งของแรงดันไฟหลัก แรงดันไฟฟ้าแบบบรรทัดต่อบรรทัดที่ขั้วเอาต์พุตคือ √3 เท่าของแรงดันไฟฟ้าแบบบรรทัดต่อบรรทัด กล่าวคือ เท่ากับแรงดันไฟหลักคูณด้วย 0.866
อินเวอร์เตอร์ที่ควบคุมด้วย PWM ซึ่งทำงานเฉพาะกับแรงดันอ้างอิงคลื่นไซน์แบบมอดูเลตสามารถจ่ายแรงดันไฟฟ้าได้เท่ากับ 86.6% ของแรงดันไฟฟ้าที่กำหนด (ดูรูปที่ 23)
เมื่อใช้การมอดูเลตไซน์บริสุทธิ์ แรงดันเอาต์พุตของตัวแปลงความถี่ไม่สามารถเข้าถึงแรงดันมอเตอร์ได้ เนื่องจากแรงดันเอาต์พุตจะลดลง 13% ด้วย
อย่างไรก็ตาม สามารถรับแรงดันไฟเพิ่มเติมที่ต้องการได้โดยการลดจำนวนพัลส์เมื่อความถี่เกิน 45 Hz แต่วิธีนี้มีข้อเสียอยู่บ้าง โดยเฉพาะอย่างยิ่ง มันทำให้เกิดการเปลี่ยนแปลงขั้นตอนของแรงดันไฟฟ้า ซึ่งทำให้การทำงานของมอเตอร์ไฟฟ้าไม่เสถียร หากจำนวนพัลส์ลดลง ค่าฮาร์โมนิกที่เอาต์พุตของตัวแปลงความถี่จะเพิ่มขึ้น ซึ่งจะเพิ่มการสูญเสียในมอเตอร์
อีกวิธีในการแก้ปัญหานี้คือการใช้แรงดันอ้างอิงอื่นแทนแรงดันไซน์สามตัว ความเค้นเหล่านี้สามารถมีรูปร่างใดก็ได้ (เช่น สี่เหลี่ยมคางหมูหรือขั้นบันได)
ตัวอย่างเช่น ค่าอ้างอิงแรงดันไฟฟ้าทั่วไปหนึ่งค่าใช้ฮาร์มอนิกที่สามของค่าอ้างอิงแรงดันไซน์ เพื่อให้ได้โหมดสวิตชิ่งของอุปกรณ์เซมิคอนดักเตอร์ของอินเวอร์เตอร์ซึ่งจะเพิ่มแรงดันเอาต์พุตของตัวแปลงความถี่ เป็นไปได้โดยการเพิ่มแอมพลิจูดของแรงดันอ้างอิงไซน์ 15.5% และเพิ่มฮาร์มอนิกที่สามเข้าไป
PWM แบบซิงโครนัส
ปัญหาหลักในการใช้วิธี PWM ที่ควบคุมด้วยไซน์คือความจำเป็นในการกำหนดค่าที่เหมาะสมที่สุดของเวลาเปลี่ยนและมุมสำหรับแรงดันไฟฟ้าในช่วงเวลาที่กำหนด เวลาเปลี่ยนเหล่านี้ต้องตั้งค่าในลักษณะที่อนุญาตให้ใช้ฮาร์โมนิกที่สูงกว่าเท่านั้น โหมดการสลับนี้จะคงไว้สำหรับช่วงความถี่ที่กำหนด (จำกัด) เท่านั้น การทำงานนอกช่วงนี้ต้องใช้วิธีการสลับแบบอื่น
PWM แบบอะซิงโครนัส
ความจำเป็นในการวางแนวสนามและการตอบสนองของระบบในแง่ของแรงบิดและการควบคุมความเร็วของไดรฟ์ AC สามเฟส (รวมถึงไดรฟ์เซอร์โว) จำเป็นต้องเปลี่ยนขั้นตอนในแอมพลิจูดและมุมของแรงดันไฟฟ้าอินเวอร์เตอร์ การใช้โหมดสวิตชิ่ง PWM แบบ "ปกติ" หรือแบบซิงโครนัสจะไม่อนุญาตให้เพิ่มแอมพลิจูดและมุมของแรงดันไฟอินเวอร์เตอร์
วิธีหนึ่งในการตอบสนองความต้องการนี้คือ PWM แบบอะซิงโครนัส ซึ่งแทนที่จะซิงโครไนซ์การมอดูเลตแรงดันเอาต์พุตกับความถี่เอาต์พุต ซึ่งมักจะทำเพื่อลดฮาร์โมนิกในมอเตอร์ วงจรควบคุมแรงดันเวคเตอร์จะถูกมอดูเลต ส่งผลให้มีการคัปปลิ้งแบบซิงโครนัสกับความถี่เอาต์พุต .
มีสองตัวแปรหลักของ PWM แบบอะซิงโครนัส:
SFAVM (การปรับเวกเตอร์แบบอะซิงโครนัสแบบโฟลว์ของสเตเตอร์ = (การปรับเวกเตอร์แบบซิงโครนัสที่เน้นไปที่ฟลักซ์ของสเตเตอร์)
60 ° AVM (การปรับเวกเตอร์แบบอะซิงโครนัส = การมอดูเลตเวกเตอร์แบบอะซิงโครนัส)
SFAVM เป็นวิธีการมอดูเลตเวคเตอร์แบบสเปซเวคเตอร์ ซึ่งช่วยให้แรงดัน แอมพลิจูด และมุมของอินเวอร์เตอร์เปลี่ยนแบบสุ่มแต่เป็นขั้นตอนในช่วงเวลาเปลี่ยน ทำให้ได้คุณสมบัติไดนามิกเพิ่มขึ้น
จุดประสงค์หลักของการใช้มอดูเลตนี้คือการปรับฟลักซ์ของสเตเตอร์ให้เหมาะสมโดยใช้แรงดันสเตเตอร์ในขณะที่ลดการกระเพื่อมของแรงบิด เนื่องจากค่าเบี่ยงเบนของมุมขึ้นอยู่กับลำดับการสวิตชิ่งและอาจทำให้แรงบิดกระเพื่อมเพิ่มขึ้นได้ ดังนั้น ลำดับการเปลี่ยนต้องคำนวณในลักษณะที่จะลดความเบี่ยงเบนของมุมเวกเตอร์ให้น้อยที่สุด การสลับระหว่างเวกเตอร์แรงดันจะขึ้นอยู่กับการคำนวณเส้นทางฟลักซ์แม่เหล็กที่ต้องการในสเตเตอร์ของมอเตอร์ ซึ่งจะกำหนดแรงบิด
ข้อเสียของระบบพลังงาน PWM แบบเดิมคือความเบี่ยงเบนของแอมพลิจูดของเวกเตอร์ฟลักซ์แม่เหล็กสเตเตอร์และมุมฟลักซ์แม่เหล็ก ความเบี่ยงเบนเหล่านี้ส่งผลเสียต่อสนามการหมุน (แรงบิด) ในช่องว่างอากาศของมอเตอร์และทำให้เกิดการกระเพื่อมของแรงบิด อิทธิพลของการเบี่ยงเบนแอมพลิจูดของ U นั้นไม่สำคัญและสามารถลดลงได้อีกโดยการเพิ่มความถี่ในการเปลี่ยน
การสร้างแรงดันไฟฟ้าของมอเตอร์
การทำงานที่เสถียรสอดคล้องกับการควบคุมของเวคเตอร์แรงดันของเครื่อง U wt เพื่อให้อธิบายเป็นวงกลม (ดูรูปที่ 24)
เวกเตอร์แรงดันไฟฟ้ามีลักษณะตามขนาดของแรงดันไฟฟ้าของมอเตอร์ไฟฟ้าและความเร็วของการหมุน ซึ่งสอดคล้องกับความถี่ในการทำงาน ณ จุดที่พิจารณาในเวลา แรงดันมอเตอร์เกิดขึ้นจากการสร้างค่าเฉลี่ยโดยใช้พัลส์สั้นจากเวกเตอร์ที่อยู่ติดกัน
วิธีการ Danfoss SFAVM มีคุณสมบัติดังต่อไปนี้:
สามารถปรับเวคเตอร์แรงดันไฟฟ้าในแอมพลิจูดและเฟสโดยไม่เบี่ยงเบนไปจากเป้าหมายที่ตั้งไว้
ลำดับการสลับเริ่มต้นด้วย 000 หรือ 111 ซึ่งจะทำให้เวกเตอร์แรงดันไฟฟ้ามีโหมดการสลับสามโหมด
ค่าเฉลี่ยของเวกเตอร์แรงดันได้มาจากพัลส์สั้นของเวกเตอร์ที่อยู่ใกล้เคียง รวมทั้งเวกเตอร์ศูนย์ 000 และ 111
รูปแบบการควบคุม
วงจรควบคุมหรือแผงควบคุมเป็นองค์ประกอบหลักที่สี่ของตัวแปลงความถี่ ซึ่งออกแบบมาเพื่อแก้ปัญหาสำคัญสี่ประการ:
การควบคุมองค์ประกอบเซมิคอนดักเตอร์ของเครื่องแปลงความถี่
การสื่อสารระหว่างตัวแปลงความถี่และอุปกรณ์ต่อพ่วง
การรวบรวมข้อมูลและการสร้างข้อความแสดงข้อผิดพลาด
ทำหน้าที่ปกป้องเครื่องแปลงความถี่และมอเตอร์ไฟฟ้า
ไมโครโปรเซสเซอร์ได้เพิ่มความเร็วของวงจรควบคุม ขยายขอบเขตของไดรฟ์อย่างมีนัยสำคัญ และลดจำนวนการคำนวณที่จำเป็น
ไมโครโปรเซสเซอร์ถูกสร้างขึ้นในตัวแปลงความถี่ และสามารถกำหนดรูปแบบพัลส์ที่เหมาะสมที่สุดสำหรับสถานะการทำงานแต่ละสถานะได้เสมอ
วงจรควบคุมสำหรับตัวแปลงความถี่ AIM
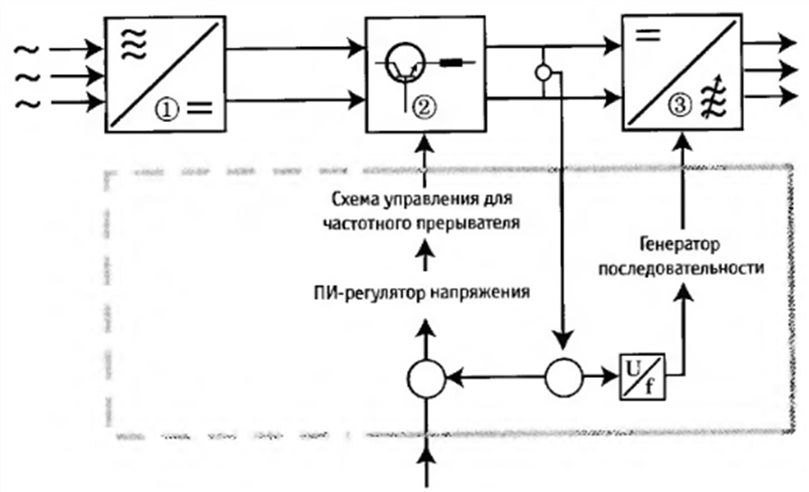
ข้าว. 25 หลักการทำงานของวงจรควบคุมสำหรับวงจรระดับกลางที่ควบคุมโดยเบรกเกอร์
ในรูป 25 แสดงตัวแปลงความถี่พร้อมการควบคุม AIM และเบรกเกอร์วงจรระดับกลาง วงจรควบคุมจะควบคุมคอนเวอร์เตอร์ (2) และอินเวอร์เตอร์ (3)
การควบคุมจะขึ้นอยู่กับค่าทันทีของแรงดันไฟฟ้าวงจรกลาง
แรงดันไฟฟ้าวงจรระดับกลางขับเคลื่อนวงจรที่ทำหน้าที่เป็นตัวนับที่อยู่หน่วยความจำสำหรับการจัดเก็บข้อมูล หน่วยความจำจะจัดเก็บลำดับเอาต์พุตสำหรับรูปแบบพัลส์ของอินเวอร์เตอร์ เมื่อแรงดันไฟฟ้าของวงจรกลางเพิ่มขึ้น การนับจะเร็วขึ้น ลำดับจะสิ้นสุดเร็วขึ้น และความถี่เอาต์พุตจะเพิ่มขึ้น
ในส่วนที่เกี่ยวกับการควบคุมตัวสับ ขั้นแรกให้เปรียบเทียบแรงดันไฟฟ้าของวงจรระดับกลางกับค่าที่ระบุของสัญญาณอ้างอิงแรงดันไฟฟ้า สัญญาณแรงดันไฟนี้คาดว่าจะให้แรงดันไฟขาออกและความถี่ที่ถูกต้อง หากสัญญาณอ้างอิงและสัญญาณวงจรกลางเปลี่ยนไป ตัวควบคุม PI จะแจ้งวงจรว่าจำเป็นต้องเปลี่ยนรอบเวลา ทำให้แรงดันไฟฟ้าวงจรกลางปรับให้เข้ากับสัญญาณอ้างอิง
วิธีการมอดูเลตทั่วไปสำหรับการควบคุมเครื่องแปลงความถี่คือการมอดูเลตความกว้างของพัลส์ (PAM) การปรับความกว้างพัลส์ (PWM) เป็นวิธีการที่ทันสมัยกว่า
การควบคุมภาคสนาม (การควบคุมเวกเตอร์)
การควบคุมเวกเตอร์สามารถจัดระเบียบได้หลายวิธี ความแตกต่างที่สำคัญระหว่างวิธีการคือเกณฑ์ที่ใช้ในการคำนวณค่าของกระแสแอ็คทีฟ, กระแสแม่เหล็ก (ฟลักซ์แม่เหล็ก) และแรงบิด
เมื่อเปรียบเทียบมอเตอร์กระแสตรงและมอเตอร์แบบอะซิงโครนัสสามเฟส (รูปที่ 26) ปัญหาบางอย่างจะถูกระบุ ที่กระแสตรง พารามิเตอร์ที่สำคัญสำหรับการสร้างแรงบิด - ฟลักซ์แม่เหล็ก (F) และกระแสเกราะ - ถูกกำหนดโดยสัมพันธ์กับขนาดและตำแหน่งของเฟสและถูกกำหนดโดยการวางแนวของขดลวดกระตุ้นและตำแหน่งของคาร์บอน แปรง (รูปที่ 26a)
ในมอเตอร์ DC กระแสเกราะและกระแสที่สร้างฟลักซ์แม่เหล็กจะอยู่ที่มุมฉากซึ่งกันและกันและค่าของพวกมันจะไม่ใหญ่มาก ในมอเตอร์ไฟฟ้าแบบอะซิงโครนัส ตำแหน่งของฟลักซ์แม่เหล็ก (F) และกระแสโรเตอร์ (I) ขึ้นอยู่กับโหลด นอกจากนี้ ตรงกันข้ามกับมอเตอร์กระแสตรง มุมเฟสและกระแสไม่สามารถกำหนดได้โดยตรงจากขนาดของสเตเตอร์

ข้าว. 26. การเปรียบเทียบเครื่อง DC และเครื่องเหนี่ยวนำไฟฟ้ากระแสสลับ
อย่างไรก็ตาม ด้วยความช่วยเหลือของแบบจำลองทางคณิตศาสตร์ จึงสามารถคำนวณแรงบิดจากความสัมพันธ์ระหว่างฟลักซ์แม่เหล็กและกระแสสเตเตอร์ได้
จากกระแสสเตเตอร์ที่วัดได้ (l s) มีการแยกส่วนประกอบ (l w) ซึ่งสร้างแรงบิดด้วยฟลักซ์แม่เหล็ก (F) ที่มุมฉากระหว่างตัวแปรทั้งสองนี้ (l c) สิ่งนี้สร้างฟลักซ์แม่เหล็กของมอเตอร์ไฟฟ้า (รูปที่ 27)
![]()
ข้าว. 27. การคำนวณส่วนประกอบปัจจุบันสำหรับการควบคุมภาคสนาม
ด้วยส่วนประกอบปัจจุบันทั้งสองนี้ แรงบิดและฟลักซ์แม่เหล็กสามารถได้รับอิทธิพลอย่างอิสระ อย่างไรก็ตาม เนื่องจากความซับซ้อนของการคำนวณตามแบบจำลองไดนามิกของมอเตอร์ไฟฟ้า การคำนวณดังกล่าวจึงคุ้มค่าในไดรฟ์ดิจิทัลเท่านั้น
เนื่องจากการควบคุมแรงกระตุ้นที่ไม่ขึ้นกับโหลดถูกแยกออกจากการควบคุมแรงบิดในวิธีนี้ จึงเป็นไปได้ที่จะควบคุมมอเตอร์เหนี่ยวนำแบบไดนามิกในลักษณะเดียวกับมอเตอร์กระแสตรง หากมีสัญญาณป้อนกลับ วิธีการควบคุมมอเตอร์กระแสสลับสามเฟสนี้มีข้อดีดังต่อไปนี้:
ตอบสนองต่อการเปลี่ยนแปลงการโหลดได้ดี
การควบคุมพลังงานที่แม่นยำ
แรงบิดเต็มที่ที่ความเร็วศูนย์
ประสิทธิภาพเทียบเท่ากับไดรฟ์ DC
V/f และการควบคุมเวกเตอร์ฟลักซ์
ในช่วงไม่กี่ปีที่ผ่านมา ระบบควบคุมความเร็วสำหรับมอเตอร์ไฟฟ้ากระแสสลับแบบสามเฟสได้รับการพัฒนาโดยใช้หลักการควบคุมสองแบบที่แตกต่างกัน:
การควบคุม V/f ปกติ หรือการควบคุม SCALAR และการควบคุมเวกเตอร์ฟลักซ์
ทั้งสองวิธีมีข้อดีของตัวเอง ขึ้นอยู่กับประสิทธิภาพของไดรฟ์เฉพาะ (ไดนามิก) และข้อกำหนดด้านความแม่นยำ
การควบคุม V/f มีช่วงการควบคุมความเร็วที่จำกัด (ประมาณ 1:20) และต้องใช้หลักการควบคุมที่แตกต่างกัน (การชดเชย) ที่ความเร็วต่ำ เมื่อใช้วิธีนี้ การปรับตัวแปลงความถี่ให้เข้ากับมอเตอร์นั้นค่อนข้างง่าย และการควบคุมจะไม่ได้รับผลกระทบจากการเปลี่ยนแปลงโหลดในทันทีตลอดช่วงความเร็วทั้งหมด
ในไดรฟ์ที่ควบคุมด้วยฟลักซ์ ตัวแปลงความถี่ต้องได้รับการกำหนดค่าอย่างแม่นยำสำหรับมอเตอร์ ซึ่งต้องใช้ความรู้โดยละเอียดเกี่ยวกับพารามิเตอร์ของมอเตอร์ จำเป็นต้องมีส่วนประกอบเพิ่มเติมเพื่อรับสัญญาณป้อนกลับ
ข้อดีบางประการของการควบคุมประเภทนี้:
ตอบสนองอย่างรวดเร็วต่อการเปลี่ยนแปลงความเร็วและช่วงความเร็วที่กว้าง
การตอบสนองแบบไดนามิกที่ดีขึ้นต่อการเปลี่ยนแปลงทิศทาง
หลักการควบคุมเดียวมีให้ตลอดช่วงความเร็วทั้งหมด
สำหรับผู้ใช้ ทางออกที่ดีที่สุดคือการผสมผสานคุณสมบัติที่ดีที่สุดของทั้งสองหลักการเข้าด้วยกัน เห็นได้ชัดว่าจำเป็นต้องมีความเสถียรในการโหลด/ยกเลิกการโหลดในช่วงความเร็วทั้งหมด ซึ่งมักจะเป็นจุดแข็งของการควบคุม V/f และการตอบสนองอย่างรวดเร็วต่อการเปลี่ยนแปลงการอ้างอิงความเร็ว (เช่นเดียวกับในการควบคุมภาคสนาม)
เมื่อออกแบบอุปกรณ์อิเล็กทรอนิกส์ มักต้องใช้แหล่งจ่ายไฟที่มีแรงดันเอาต์พุตต่างกัน ตัวแปลง DC-DC บนตัวเก็บประจุแบบสวิตชิ่งใช้กันอย่างแพร่หลายในอุปกรณ์สมัยใหม่ ทำให้สามารถสร้างแรงดันไฟฟ้าที่ต้องการจากแหล่งพลังงานเดียวได้ บทความนี้กล่าวถึงหลักการทำงานของตัวแปลงดังกล่าว ลักษณะทางเทคนิคและการใช้งาน
ลองพิจารณาหลักการทำงานของตัวแปลงโดยใช้ตัวอย่างของวงจรไมโคร ICL7660 / MAX1044 ที่แพร่หลายพร้อมฟังก์ชันเพิ่มเติม ชิป MAX1044 นั้นแตกต่างจาก ICL7660 เมื่อมีอินพุต Boost (เพิ่มความถี่ของออสซิลเลเตอร์ภายใน) บล็อกไดอะแกรมของชิป ICL7660 แสดงในรูปที่ 1
วงจรประกอบด้วยสวิตช์ MOS กำลังสี่ตัวที่ควบคุมโดยองค์ประกอบลอจิกและตัวเปลี่ยนระดับแรงดันไฟฟ้า ซึ่งทำงานที่ความถี่ที่ได้จากการหารด้วยความถี่สองความถี่ของออสซิลเลเตอร์ RC หลัก สิ่งนี้ช่วยให้คุณสร้างพัลส์ควบคุมที่มีคุณสมบัติ "คดเคี้ยว" ที่ต้องการและเพิ่มประสิทธิภาพการใช้ออสซิลเลเตอร์ RC หลัก ความถี่ในการทำงานที่ไม่มีองค์ประกอบภายนอกคือ 10 kHz จำเป็นต้องมีตัวควบคุมแรงดันไฟฟ้าภายในเพื่อให้แน่ใจว่าการทำงานของไมโครเซอร์กิตจากแหล่งที่มีแรงดันไฟฟ้าลดลง
หลักการทำงานของไมโครเซอร์กิตในโหมดของอินเวอร์เตอร์แรงดันไฟในอุดมคติจะได้รับการพิจารณาตามแผนภาพการทำงานที่แสดงในรูปที่ 2
เมื่อปิดปุ่ม S1 และ S3 และเปิดปุ่ม S2 และ S4 ในช่วงครึ่งแรกของรอบ ตัวเก็บประจุภายนอก C1 จะถูกชาร์จจากแหล่งพลังงานไปยังแรงดันไฟฟ้า V + และเมื่อปิดปุ่ม S2 และ S4 และ ปุ่ม S1 และ S3 ถูกเปิดขึ้นในช่วงครึ่งหลังของวงจร ตัวเก็บประจุ C1 จะส่งประจุบางส่วนไปยังตัวเก็บประจุภายนอก C2 โดยให้แรงดันไฟฟ้า -V + ที่ขา V OUT ของไมโครเซอร์กิต ค่าแรงดันไฟฟ้าที่ระบุสอดคล้องกับสถานะคงตัว
พลังงานที่ถ่ายโอนโดยตัวเก็บประจุ C1 ในหนึ่งรอบถูกกำหนดโดยใช้นิพจน์
![]() (1)
(1)
หนึ่งในตัวชี้วัดหลักของตัวแปลงคือปัจจัยการแปลง
![]() (2)
(2)
โดยที่ U ออก - แรงดันที่เอาต์พุตของตัวแปลงที่กระแสโหลดเท่ากับ ผม; คุณ out.id - แรงดันไฟฟ้าที่เอาต์พุตของตัวแปลงในอุดมคติ (สำหรับอินเวอร์เตอร์ U out.id. = -U in)
จากนิพจน์ (2) จะเห็นได้ว่าค่าสัมประสิทธิ์การแปลงมีค่าสูงเมื่อ U out(i) = U out.id , เช่น. ที่ V1 = V2 อย่างไรก็ตาม ดังที่เห็นได้จากนิพจน์ (1) ในกรณีนี้ พลังงานที่ถ่ายโอนโดยตัวเก็บประจุ C1 จะลดลง ซึ่งทำให้ยากต่อการตรวจสอบค่าสัมประสิทธิ์การแปลงค่าที่สูง การเพิ่มขึ้นของพลังงานที่ถ่ายโอนโดยตัวเก็บประจุสามารถทำได้โดยการเพิ่มความจุ C1 หรือความถี่ในการทำงาน ในกรณีแรกขนาดของตัวเก็บประจุจะเพิ่มขึ้นและทำให้ขนาดของคอนเวอร์เตอร์เพิ่มขึ้น ในกรณีที่สอง การสูญเสียพลังงานเพิ่มขึ้นในอุปกรณ์จริง ซึ่งทำให้ประสิทธิภาพลดลง
โดยที่ P out คือกำลังที่ส่งไปยังโหลด พิน - พลังงานที่ใช้จากแหล่งพลังงาน
จากการวิเคราะห์จะเห็นได้ว่าเมื่อพัฒนาอุปกรณ์แปลงเฉพาะจำเป็นต้องปรับค่าความถี่ในการทำงานและความจุของตัวเก็บประจุ C1 ให้เหมาะสม ในการทำเช่นนี้จำเป็นต้องจัดเตรียมความเป็นไปได้ในการเปลี่ยนความถี่ในการทำงานตามค่าของแรงดันไฟฟ้าที่ใช้งานและกระแสที่ใช้
พิจารณาคุณสมบัติทางไฟฟ้าของวงจรไมโคร ICL7660 ซึ่งรวมตามวงจรทดสอบที่แสดงในรูปที่ 3
ตารางที่ 1. ลักษณะทางไฟฟ้าโดยย่อของไมโครเซอร์กิตที่ V + \u003d 5V, C OSC \u003d 0
การพึ่งพาอาศัยกันทั่วไปของคุณสมบัติทางไฟฟ้าของชิป ICL7660 แสดงในรูปที่ 4-8
การพึ่งพาที่ให้มาช่วยให้สามารถปรับแต่งพารามิเตอร์ของตัวแปลงสำหรับค่าเฉพาะของแรงดันไฟฟ้าที่ใช้งานและกระแสที่ใช้
ลองพิจารณาวงจรทั่วไปสำหรับการเปิดชิป ICL7660
อินเวอร์เตอร์ไฟฟ้า
วงจรสำหรับเปิดไมโครเซอร์กิตในโหมดอินเวอร์เตอร์แรงดันไฟแสดงในรูปที่ 9

อินเวอร์เตอร์ให้แรงดันเอาต์พุต V OUT เท่ากับ -V + ในช่วง 1.5V
อิมพีแดนซ์เอาต์พุตของไมโครเซอร์กิตขึ้นอยู่กับโหมด DC และค่ารีแอกแตนซ์ของตัวเก็บประจุ C1
![]() (3)
(3)
ดังนั้นสำหรับ C1 เล็กน้อย \u003d 10 microfarads และความถี่ f \u003d 10 kHz X C \u003d 3.18 โอห์ม เพื่อขจัดผลกระทบของตัวเก็บประจุ C1 ต่ออิมพีแดนซ์เอาต์พุต จำเป็นต้องมี X C
เพื่อใช้งานไมโครเซอร์กิตในช่วง 1.5V
ลดอิมพีแดนซ์เอาต์พุต
เพื่อลดความต้านทานเอาต์พุต คุณสามารถใช้การเชื่อมต่อแบบขนานของไมโครเซอร์กิต ซึ่งแสดงในรูปที่ 10
อิมพีแดนซ์เอาต์พุตของวงจรดังกล่าวขึ้นอยู่กับจำนวนของไมโครเซอร์กิตที่เชื่อมต่อแบบขนาน นและถูกกำหนดโดยใช้นิพจน์
![]() (4)
(4)
รูปแสดงให้เห็นว่าตัวเก็บประจุ C1 เป็นแบบแยกส่วนสำหรับไมโครเซอร์กิตแต่ละอัน และตัวเก็บประจุ C2 เป็นแบบทั่วไป การรวมไมโครวงจรที่พิจารณาแล้วช่วยเพิ่มกระแสไฟขาออกปัจจัยการแปลงและประสิทธิภาพของตัวแปลง
ชิปซ้อน
ในการเพิ่มแรงดันไฟขาออก คุณสามารถใช้วงจรเรียงซ้อนของไมโครเซอร์กิตได้ ดังแสดงในรูปที่ 11
แรงดันเอาต์พุตของตัวแปลงดังกล่าวคือ -nV + รับช่วงที่อนุญาต 1.5V
ตัวเพิ่มแรงดัน
เพื่อให้ได้แรงดันบวกจากแหล่งจ่ายแรงดันลบ เช่นเดียวกับการเพิ่มแรงดันไฟเป็นสองเท่า วงจรไมโครจะถูกเปิดดังแสดงในรูปที่ 12
ที่พิน 8 และ 3 แรงดันไฟฟ้าจะถูกสร้างขึ้น V OUT \u003d -V - และที่พิน 8 และ 5 V OUT \u003d -2V - ไดโอดเป็นสิ่งจำเป็นเพื่อให้แน่ใจว่าขั้นตอนเริ่มต้นของการทำงานของไมโครเซอร์กิต ในบางกรณีจะสะดวกที่จะใช้วงจรสวิตชิ่งที่แสดงในรูปที่ 13
แรงดันเอาต์พุตของตัวแปลงดังกล่าวคือ 2V + -2V F โดยที่ V F คือแรงดันตกคร่อมไดโอดในทิศทางไปข้างหน้า (สำหรับซิลิคอนไดโอด V F \u003d 0.5-0.7V)
ตัวแบ่งแรงดัน
เมื่อใช้ชิป ICL7660 คุณจะได้รับตัวแบ่งแรงดันไฟฟ้าอันทรงพลังเมื่อคุณเปิดเครื่อง ดังแสดงในรูปที่ 14
แหล่งแรงดันไฟฟ้ารวม
ชิป ICL7660 ช่วยให้คุณรับแรงดันไฟฟ้าที่มีพิกัดต่างกัน หนึ่งในตัวเลือกการสลับแสดงในรูปที่ 15
ในตัวแปลงแรงดันไฟฟ้าที่แสดงในรูป แรงดันไฟฟ้า - (V + -V F) และ 2V + -2V F จะเกิดขึ้น
การทำงานของบัฟเฟอร์
ดังที่เห็นได้จากวัสดุที่กล่าวถึงข้างต้น คอนเวอร์เตอร์ที่มีตัวเก็บประจุแบบสวิตช์มีคุณสมบัติแบบย้อนกลับได้ วิธีนี้ช่วยให้คุณใช้โหมดบัฟเฟอร์ของการทำงานได้ ซึ่งเป็นหนึ่งในตัวเลือกที่แสดงในรูปที่ 16

อุปกรณ์นี้ใช้พลังงานจากแหล่งกำเนิด V IN ซึ่งให้แรงดันไฟฟ้า V OUT (เอาต์พุตที่ 5 ของไมโครเซอร์กิตที่ n) และ V + (เอาต์พุตที่ 8 ของไมโครเซอร์กิตแรก) - แรงดันชาร์จแบตเตอรี่ เมื่อแรงดันไฟฟ้าของแหล่งจ่ายล้มเหลวหรือตัดการเชื่อมต่อแหล่งจ่ายไฟ แรงดันไฟฟ้า V OUT จะถูกสร้างขึ้นจากแรงดันแบตเตอรี่ V + .
การเปลี่ยนความถี่ของเครื่องกำเนิด ICL7660
พารามิเตอร์ของตัวแปลงที่พิจารณานั้นขึ้นอยู่กับความถี่ของเครื่องกำเนิดไมโครเซอร์กิต การพึ่งพาประสิทธิภาพของความถี่แสดงในรูปที่ 6
จะเห็นได้จากรูปที่กระแสเอาต์พุต 1 mA ให้ประสิทธิภาพสูงที่ความถี่ต่ำกว่า 1 kHz ที่ความถี่สูง การสูญเสียในวงจรควบคุมเครื่องกำเนิดไฟฟ้าและสวิตช์ไฟจะลดประสิทธิภาพโดยรวม เพื่อให้ได้ประสิทธิภาพสูงในกรณีนี้ จำเป็นต้องลดความถี่ในการทำงานของคอนเวอร์เตอร์ ความถี่ในการทำงานสามารถลดลงได้โดยใช้ออสซิลเลเตอร์ภายนอกหรือโดยการเชื่อมต่อ C OSC ดังแสดงในรูปที่ 3
วิธีที่ง่ายกว่าคือการใช้ตัวเก็บประจุภายนอกซึ่งสามารถกำหนดความจุได้จากกราฟที่แสดงในรูปที่ 8
สำหรับกรณีที่พิจารณาข้างต้น ความถี่ในการทำงานเท่ากับ 1 kHz ทำได้โดยการเชื่อมต่อตัวเก็บประจุภายนอกที่มีความจุ C OSC \u003d 100pF เมื่อใช้วิธีนี้ต้องคำนึงว่า C OSC มากกว่า 1,000pF จะต้องเพิ่มความจุของตัวเก็บประจุ C1 และ C2 เป็น 100 microfarads
วิธีการที่พิจารณาแล้วในการเปลี่ยนความถี่ของเครื่องกำเนิดไฟฟ้านั้นใช้ในอุปกรณ์ไมโครพาวเวอร์เพื่อให้แน่ใจว่าตัวแปลงจะมีประสิทธิภาพสูง
ในบางกรณี ความถี่ในการทำงานของคอนเวอร์เตอร์จะต้องเพิ่มขึ้น ในกรณีเหล่านี้ คุณสามารถใช้ C1 และ C2 ที่มีความจุน้อยกว่าและมีขนาดเล็กกว่า นอกจากนี้ยังช่วยลดระดับเสียงของเครื่องกำเนิดไฟฟ้าในระบบเสียง วิธีที่ง่ายที่สุดในการเพิ่มความถี่คือการใช้พิน Boost บน MAX1044 เมื่อปิดคีย์ S1 (รูปที่ 3) ความถี่ในการทำงานของไมโครเซอร์กิตจะเพิ่มขึ้น 6 เท่า
โหมดพลังงานต่ำ
เมื่อทำงานในโหมดสแตนด์บาย จำเป็นต้องลดพลังงานที่ใช้โดยตัวแปลง ไมโครวงจรบางตัวมีอินพุต SD ซึ่งคุณสามารถลดการใช้กระแสไฟเป็นหน่วยไมโครแอมป์ได้ โหมดพลังงานต่ำยังสามารถใช้งานได้โดยใช้อินพุต OSC ตัวเลือกสำหรับการนำโหมดนี้ไปใช้เมื่อใช้องค์ประกอบลอจิกทั่วไป องค์ประกอบลอจิกที่มีท่อระบายน้ำเปิด (ตัวสะสม) และองค์ประกอบที่มีสถานะที่สามจะแสดงในรูปที่ 17

ไมโครเซอร์กิตคอนเวอร์เตอร์บนตัวเก็บประจุแบบสวิตช์ผลิตโดยบริษัทหลายแห่ง: Maxim, National Semiconductor, Microchip เป็นต้น ไมโครเซอร์กิตเหล่านี้มีหลักการทำงานเหมือนกันและแตกต่างกันในหน้าที่การใช้งาน พารามิเตอร์ทางไฟฟ้าและการออกแบบ ผู้นำที่ไม่ต้องสงสัยในพื้นที่นี้คือ Maxim ซึ่งสร้างวงจรไมโครคอนเวอร์เตอร์ที่กว้างที่สุด ตารางที่ 2 แสดงคุณสมบัติของชิปบางตัวที่ผลิตโดยบริษัทต่างๆ
ตารางที่ 2. ลักษณะโดยย่อของไมโครเซอร์กิต
| ประเภทชิป | คุณสมบัติที่นำไปใช้ | กระแสไฟขาออก (mA) | แรงดันไฟฟ้าขาเข้า V IN (V) | ความถี่ (kHz) | การบริโภคในปัจจุบัน (μA) | บันทึก |
| ICL7660 TC7660 LMC7660 | -(V IN) หรือ 2(V IN) หรือ ½(V IN) | 20 | 1.5÷10 | 10 | 250 | |
| MAX889 | (-2.5V) (-V IN) | 200 | 2.7÷5.5 | 2000 | 50000 | ฟังก์ชั่นปิดเครื่องในตัว |
| MAX168 MAX1681 | -(VIN) หรือ 2(VIN) | 125 | 2÷5.5 | 125÷200 500÷1000 | 30000 | |
| MAX680 | 2(VIN) และ -2(VIN) | 10 | 2÷6 | 8 | 1000 | |
| MAX681 | 2(VIN) และ -2(VIN) | 10 | 2÷6 | 8 | 1000 | ไม่มีตัวเก็บประจุภายนอก |
| MAX1673 | 3B | 125 | 2÷5.5 | 350 | 16000 | |
| LM3350 | 3/2(V IN) หรือ 2/3(วิน) | 50 | 1.5÷5.5 | 1600 | ||
| LM3352 | 2.5V; 3V หรือ 3.3V | 200 | 2.5÷5.5 | 1000 | ||
| MAX870 | -(V IN) หรือ 2(V IN) หรือ ½(V IN) | 50 | 1.6÷5.5 | 56÷194 | 1000 | |
| MAX864 | 2(VIN) และ -2(VIN) | 100 | 1.75÷6 | 7÷185 | 5000 | ฟังก์ชั่นปิดเครื่องในตัว |
บันทึก: microcircuits MAX, ICL - บริษัท MAXIM; LM, LMC - เซมิคอนดักเตอร์แห่งชาติ; TC - ไมโครชิป
ตารางแสดงให้เห็นว่าคอนเวอร์เตอร์บนตัวเก็บประจุแบบสวิตช์สามารถทำงานในโหมดของอินเวอร์เตอร์, ตัวทวีคูณ, ตัวแบ่งแรงดันไฟฟ้าขาเข้าทีละสอง และช่วยให้คุณสร้างแรงดันไฟฟ้าหลายตัวที่เอาต์พุตพร้อมกันได้ ไมโครเซอร์กิตบางตัวมีตัวควบคุมแรงดันไฟฟ้าในตัว ไมโครเซอร์กิตที่พิจารณาใช้กันอย่างแพร่หลายในแล็ปท็อป โทรศัพท์มือถือ วิทยุติดตามตัว อุปกรณ์พกพา และอุปกรณ์อื่นๆ ในการฝึกซ้อมวิทยุสมัครเล่น สามารถใช้ตัวอย่างเช่น เพื่อสร้างแรงดันไฟฟ้าสองขั้วสำหรับแอมพลิฟายเออร์ในการดำเนินงาน เพื่อให้กำลังบัฟเฟอร์แก่อุปกรณ์อิเล็กทรอนิกส์จากเซลล์แบตเตอรี่ก้อนเดียว เพื่อสร้างแรงดันไฟฟ้าของ LCD เป็นต้น ขนาดเล็ก ปัจจัยการแปลงสูง และประสิทธิภาพ การไม่มีตัวเหนี่ยวนำ คุณสมบัติย้อนกลับได้น่าสนใจมากสำหรับการใช้ตัวแปลงที่พิจารณาแล้วในการพัฒนาอุปกรณ์อิเล็กทรอนิกส์ต่างๆ
วรรณกรรม
- แค็ตตาล็อกซีดีแม็กซิม เวอร์ชัน 5.0 2001 ฉบับสมบูรณ์
- สมุดข้อมูลผลิตภัณฑ์อนาล็อกและอินเทอร์เฟซแห่งชาติ ฉบับปี 2544
เราแนะนำให้คุณอ่าน
 ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น
ลักษณะทางจิตวิทยาของเด็กในวัยรุ่น การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่
การย้ายเด็กไปโรงเรียนอื่น - ขั้นตอนและเอกสารที่จำเป็น จะโอนเด็กไปโรงเรียนอื่นหรือไม่ การวินิจฉัยการรักษาการรักษา urogenital chlamydia") Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia
Chlamydia urogenital - คำอธิบายสาเหตุอาการ (สัญญาณ) การวินิจฉัยการรักษาการรักษา urogenital chlamydia ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร
ประโยชน์และความสำคัญของ hydroamino acid threonine สำหรับร่างกายมนุษย์ L threonine คืออะไร

