คุณสามารถปรับปรุงความแม่นยำของกฎข้อบังคับได้อย่างมากโดยการใช้กฎหมาย PID (กฎหมายข้อบังคับตามสัดส่วน-ส่วนประกอบ-ส่วนต่าง)
ในการใช้กฎหมาย PID จะใช้ตัวแปรหลักสามตัว:
P – แถบสัดส่วน %;
ผม – เวลารวม s;
D คือเวลาที่แตกต่าง, s
การปรับตัวควบคุม PID ด้วยตนเอง (การกำหนดค่าของพารามิเตอร์ P, I, D) ซึ่งให้คุณภาพการควบคุมที่ต้องการนั้นค่อนข้างซับซ้อนและไม่ค่อยได้ใช้ในทางปฏิบัติ ตัวควบคุม PID ซีรีส์ UT/UP ให้การปรับแต่งพารามิเตอร์ PID โดยอัตโนมัติสำหรับกระบวนการควบคุมเฉพาะ ในขณะที่ยังคงความเป็นไปได้ในการปรับด้วยตนเอง
สัดส่วน
ในแถบสัดส่วนที่กำหนดโดยค่าสัมประสิทธิ์ P สัญญาณควบคุมจะเปลี่ยนตามสัดส่วนของความแตกต่างระหว่างค่าที่ตั้งไว้และค่าจริงของพารามิเตอร์ (ไม่ตรงกัน):
สัญญาณควบคุม = 100/PE,
โดยที่ E คือความไม่ตรงกัน
ค่าสัมประสิทธิ์ของสัดส่วน (กำไร) K แปรผกผันกับ P:
แถบสัดส่วนถูกกำหนดโดยคำนึงถึงเซ็ตพอยต์ควบคุมที่ตั้งไว้ และภายในแบนด์นี้ สัญญาณควบคุมจะเปลี่ยนจาก 0 เป็น 100% เช่น ถ้าค่าจริงและเซ็ตพอยต์เท่ากัน สัญญาณเอาต์พุตจะมีค่า 50%
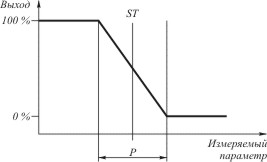
โดยที่ P คือแถบสัดส่วน
ST - จุดกำหนดระเบียบ
ตัวอย่างเช่น:
ช่วงการวัด 0…1000 °С;
จุดควบคุมที่กำหนด ST = 500 °С;
แถบสัดส่วน P = 5% ซึ่งคือ 50 °C (5% ของ 1,000 °C);
ที่อุณหภูมิ 475 °C และต่ำกว่า สัญญาณควบคุมจะมีค่า 100% ที่ 525 °C และสูงกว่า - 0% ในช่วง 475…525 °C (ในแถบสัดส่วน) สัญญาณควบคุมจะเปลี่ยนตามสัดส่วนของค่าที่ไม่ตรงกันโดยมีค่าเกน K = 100/P = 20
การลดค่าของแบนด์ตามสัดส่วน P จะเพิ่มการตอบสนองของตัวควบคุมต่อความไม่ตรงกัน เช่น ความไม่ตรงกันเล็กน้อยจะสอดคล้องกับค่าที่มากขึ้นของสัญญาณควบคุม แต่ในขณะเดียวกัน เนื่องจากอัตราขยายที่มาก กระบวนการจะใช้ลักษณะการแกว่งรอบๆ ค่าที่ตั้งไว้ และไม่สามารถควบคุมได้อย่างแม่นยำ เมื่อแถบสัดส่วนเพิ่มขึ้นมากเกินไป ผู้ควบคุมจะตอบสนองช้าเกินไปต่อผลลัพธ์ที่ไม่ตรงกัน และจะไม่สามารถติดตามไดนามิกของกระบวนการได้ เพื่อชดเชยข้อเสียของการควบคุมตามสัดส่วน จึงได้มีการแนะนำลักษณะเวลาเพิ่มเติมซึ่งเป็นองค์ประกอบสำคัญ
ส่วนประกอบสำคัญ
ถูกกำหนดโดยค่าคงที่เวลาการรวม I ซึ่งเป็นฟังก์ชันของเวลาและให้การเปลี่ยนแปลงในเกน (การเลื่อนของแถบสัดส่วน) ในช่วงเวลาที่กำหนด
สัญญาณควบคุม = 100/PE + 1/I ∫ E dt.
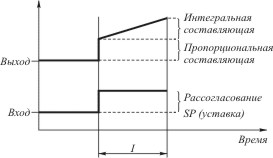
ดังที่เห็นได้จากรูป หากองค์ประกอบตามสัดส่วนของกฎหมายควบคุมไม่ได้ให้การลดลงของความไม่ตรงกัน องค์ประกอบที่สำคัญจะเริ่มค่อยๆ เพิ่มกำไรในช่วงเวลา I หลังจากช่วงเวลาหนึ่ง ฉัน กระบวนการนี้ซ้ำแล้วซ้ำอีก หากค่าไม่ตรงกันมีขนาดเล็ก (หรือลดลงอย่างรวดเร็ว) อัตราขยายจะไม่เพิ่มขึ้นและหากค่าของพารามิเตอร์เท่ากับการตั้งค่าที่ระบุ จะใช้ค่าต่ำสุดบางส่วน ในส่วนนี้ ส่วนประกอบสำคัญจะเรียกว่าฟังก์ชันปิดระบบควบคุมอัตโนมัติ ในกรณีของการควบคุม PID การตอบสนองของขั้นตอนของกระบวนการจะผันผวนซึ่งค่อยๆ สลายไปตามค่าที่ตั้งไว้
ระยะอนุพันธ์
วัตถุควบคุมจำนวนมากค่อนข้างเฉื่อย เช่น พวกมันมีความล่าช้าในการตอบสนองต่อการกระทำที่ใช้ (เวลาตาย) และตอบสนองต่อไปหลังจากที่การควบคุมถูกลบออก (เวลาล่าช้า) ตัวควบคุม PID บนวัตถุดังกล่าวจะเปิด/ปิดสัญญาณควบคุมช้าเสมอ เพื่อขจัดผลกระทบนี้ ส่วนประกอบดิฟเฟอเรนเชียลจะถูกนำมาใช้ ซึ่งกำหนดโดยค่าคงที่เวลาดิฟเฟอเรนติเอต D และมีการจัดเตรียมการดำเนินการตามกฎหมายควบคุม PID อย่างเต็มรูปแบบ คอมโพเนนต์ดิฟเฟอเรนเชียลคืออนุพันธ์ของเวลาที่ไม่ตรงกัน เช่น เป็นฟังก์ชันของอัตราการเปลี่ยนแปลงของพารามิเตอร์ควบคุม ในกรณีที่ไม่ตรงกันกลายเป็น ค่าคงที่ส่วนประกอบส่วนต่างจะหยุดส่งผลกระทบต่อสัญญาณควบคุม
สัญญาณควบคุม = 100/P E + 1/I ∫ E dt + D d/dt E
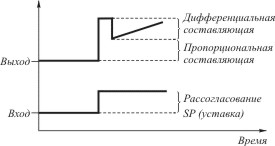
ด้วยการแนะนำส่วนประกอบดิฟเฟอเรนเชียล คอนโทรลเลอร์เริ่มคำนึงถึงเวลาตายและเวลาหน่วง โดยเปลี่ยนสัญญาณควบคุมล่วงหน้า สิ่งนี้ทำให้สามารถลดความผันผวนของกระบวนการรอบๆ ค่าที่ตั้งไว้ได้อย่างมาก และบรรลุผลชั่วคราวที่เสร็จสิ้นเร็วขึ้น
ดังนั้น เมื่อสร้างสัญญาณควบคุม ตัวควบคุม PID จะคำนึงถึงคุณลักษณะของวัตถุควบคุมเอง เช่น วิเคราะห์ความไม่ตรงกันสำหรับขนาด ระยะเวลา และอัตราการเปลี่ยนแปลง กล่าวอีกนัยหนึ่ง ตัวควบคุม PID "คาดการณ์" ปฏิกิริยาของวัตถุที่ควบคุมต่อสัญญาณควบคุม และเริ่มเปลี่ยนการดำเนินการควบคุมไม่ใช่เมื่อถึงค่าที่ตั้งไว้ แต่ล่วงหน้า
5. ฟังก์ชันการถ่ายโอนที่แสดงลิงก์: K (p) \u003d K / Tr
ในระบบที่มีวิธีการควบคุมนี้ เนื่องจากมีฮิสเทรีซิสและสัญญาณควบคุมจำกัด ค่าที่แท้จริงของพารามิเตอร์จะผันผวนเป็นระยะๆ เสมอเมื่อเทียบกับค่าที่ตั้งไว้ กล่าวคือ จะไม่ตรงกันเสมอ เป็นไปได้ที่จะเพิ่มความแม่นยำในการควบคุมเล็กน้อยโดยการลดฮิสเทรีซิสของการสลับ แต่สิ่งนี้นำไปสู่การเพิ่มความถี่การสลับของรีเลย์เอาต์พุตและลดลง วงจรชีวิต. ดังนั้น ตัวควบคุมประเภทนี้จึงไม่เหมาะกับงานที่พารามิเตอร์ควบคุมมีไดนามิกสูงและต้องการการบำรุงรักษาค่าของพารามิเตอร์ที่ควบคุมอย่างแม่นยำ การประยุกต์ใช้ตัวควบคุมขีดจำกัดที่เป็นไปได้ - วัตถุที่มีความเฉื่อยสูงและข้อกำหนดต่ำสำหรับความแม่นยำในการควบคุม
การควบคุมแบบพีไอดี
คุณสามารถปรับปรุงความแม่นยำของกฎข้อบังคับได้อย่างมากโดยการใช้กฎหมาย PID (กฎหมายข้อบังคับตามสัดส่วน-ส่วนประกอบ-ส่วนต่าง)
ในการใช้กฎหมาย PID จะใช้ตัวแปรหลักสามตัว:
P – แถบสัดส่วน %;
ผม – เวลารวม s;
D คือเวลาที่แตกต่าง, s
การปรับตัวควบคุม PID ด้วยตนเอง (การกำหนดค่าของพารามิเตอร์ P, I, D) ซึ่งให้คุณภาพการควบคุมที่ต้องการนั้นค่อนข้างซับซ้อนและไม่ค่อยได้ใช้ในทางปฏิบัติ ตัวควบคุม PID ซีรีส์ UT/UP ให้การปรับแต่งพารามิเตอร์ PID โดยอัตโนมัติสำหรับกระบวนการควบคุมเฉพาะ ในขณะที่ยังคงความเป็นไปได้ในการปรับด้วยตนเอง
สัดส่วน
ในแถบสัดส่วนที่กำหนดโดยค่าสัมประสิทธิ์ P สัญญาณควบคุมจะเปลี่ยนตามสัดส่วนของความแตกต่างระหว่างค่าที่ตั้งไว้และค่าจริงของพารามิเตอร์ (ไม่ตรงกัน):
สัญญาณควบคุม = 100/PE,
โดยที่ E คือความไม่ตรงกัน
ค่าสัมประสิทธิ์ของสัดส่วน (กำไร) K แปรผกผันกับ P:
แถบสัดส่วนถูกกำหนดโดยคำนึงถึงเซ็ตพอยต์ควบคุมที่ตั้งไว้ และภายในแบนด์นี้ สัญญาณควบคุมจะเปลี่ยนจาก 0 เป็น 100% เช่น ถ้าค่าจริงและเซ็ตพอยต์เท่ากัน สัญญาณเอาต์พุตจะมีค่า 50%
โดยที่ P คือแถบสัดส่วน
ST - จุดกำหนดระเบียบ
ตัวอย่างเช่น:
ช่วงการวัด 0…1000 °С;
จุดควบคุมที่กำหนด ST = 500 °С;
แถบสัดส่วน P = 5% ซึ่งคือ 50 °C (5% ของ 1,000 °C);
ที่อุณหภูมิ 475 °C และต่ำกว่า สัญญาณควบคุมจะมีค่า 100% ที่ 525 °C และสูงกว่า - 0% ในช่วง 475…525 °C (ในแถบสัดส่วน) สัญญาณควบคุมจะเปลี่ยนตามสัดส่วนของค่าที่ไม่ตรงกันโดยมีค่าเกน K = 100/P = 20
การลดค่าของแบนด์ตามสัดส่วน P จะเพิ่มการตอบสนองของตัวควบคุมต่อความไม่ตรงกัน เช่น ความไม่ตรงกันเล็กน้อยจะสอดคล้องกับค่าที่มากขึ้นของสัญญาณควบคุม แต่ในขณะเดียวกัน เนื่องจากอัตราขยายที่มาก กระบวนการจะใช้ลักษณะการแกว่งรอบๆ ค่าที่ตั้งไว้ และไม่สามารถควบคุมได้อย่างแม่นยำ เมื่อแถบสัดส่วนเพิ่มขึ้นมากเกินไป ผู้ควบคุมจะตอบสนองช้าเกินไปต่อผลลัพธ์ที่ไม่ตรงกัน และจะไม่สามารถติดตามไดนามิกของกระบวนการได้ เพื่อชดเชยข้อเสียของการควบคุมตามสัดส่วน จึงได้มีการแนะนำลักษณะเวลาเพิ่มเติมซึ่งเป็นองค์ประกอบสำคัญ
ส่วนประกอบสำคัญ
ถูกกำหนดโดยค่าคงที่เวลาการรวม I ซึ่งเป็นฟังก์ชันของเวลาและให้การเปลี่ยนแปลงในเกน (การเลื่อนของแถบสัดส่วน) ในช่วงเวลาที่กำหนด
สัญญาณควบคุม = 100/PE + 1/I ∫ E dt.
ดังที่เห็นได้จากรูป หากองค์ประกอบตามสัดส่วนของกฎหมายควบคุมไม่ได้ให้การลดลงของความไม่ตรงกัน องค์ประกอบที่สำคัญจะเริ่มค่อยๆ เพิ่มกำไรในช่วงเวลา I หลังจากช่วงเวลาหนึ่ง ฉัน กระบวนการนี้ซ้ำแล้วซ้ำอีก หากค่าไม่ตรงกันมีขนาดเล็ก (หรือลดลงอย่างรวดเร็ว) อัตราขยายจะไม่เพิ่มขึ้นและหากค่าของพารามิเตอร์เท่ากับการตั้งค่าที่ระบุ จะใช้ค่าต่ำสุดบางส่วน ในส่วนนี้ ส่วนประกอบสำคัญจะเรียกว่าฟังก์ชันปิดระบบควบคุมอัตโนมัติ ในกรณีของการควบคุม PID การตอบสนองของขั้นตอนของกระบวนการจะผันผวนซึ่งค่อยๆ สลายไปตามค่าที่ตั้งไว้
ระยะอนุพันธ์
วัตถุควบคุมจำนวนมากค่อนข้างเฉื่อย เช่น พวกมันมีความล่าช้าในการตอบสนองต่อการกระทำที่ใช้ (เวลาตาย) และตอบสนองต่อไปหลังจากที่การควบคุมถูกลบออก (เวลาล่าช้า) ตัวควบคุม PID บนวัตถุดังกล่าวจะเปิด/ปิดสัญญาณควบคุมช้าเสมอ เพื่อขจัดผลกระทบนี้ ส่วนประกอบดิฟเฟอเรนเชียลจะถูกนำมาใช้ ซึ่งกำหนดโดยค่าคงที่เวลาดิฟเฟอเรนติเอต D และมีการจัดเตรียมการดำเนินการตามกฎหมายควบคุม PID อย่างเต็มรูปแบบ คอมโพเนนต์ดิฟเฟอเรนเชียลคืออนุพันธ์ของเวลาที่ไม่ตรงกัน เช่น เป็นฟังก์ชันของอัตราการเปลี่ยนแปลงของพารามิเตอร์ควบคุม ในกรณีที่ค่าไม่ตรงกันกลายเป็นค่าคงที่ ส่วนประกอบส่วนต่างจะหยุดส่งผลกระทบต่อสัญญาณควบคุม
สัญญาณควบคุม = 100/P E + 1/I ∫ E dt + D d/dt E
ด้วยการแนะนำส่วนประกอบดิฟเฟอเรนเชียล คอนโทรลเลอร์เริ่มคำนึงถึงเวลาตายและเวลาหน่วง โดยเปลี่ยนสัญญาณควบคุมล่วงหน้า สิ่งนี้ทำให้สามารถลดความผันผวนของกระบวนการรอบๆ ค่าที่ตั้งไว้ได้อย่างมาก และบรรลุผลชั่วคราวที่เสร็จสิ้นเร็วขึ้น
ดังนั้น เมื่อสร้างสัญญาณควบคุม ตัวควบคุม PID จะคำนึงถึงคุณลักษณะของวัตถุควบคุมเอง เช่น วิเคราะห์ความไม่ตรงกันสำหรับขนาด ระยะเวลา และอัตราการเปลี่ยนแปลง กล่าวอีกนัยหนึ่ง ตัวควบคุม PID "คาดการณ์" ปฏิกิริยาของวัตถุที่ควบคุมต่อสัญญาณควบคุม และเริ่มเปลี่ยนการดำเนินการควบคุมไม่ใช่เมื่อถึงค่าที่ตั้งไว้ แต่ล่วงหน้า
เมื่อสร้างอุปกรณ์อัตโนมัติต่างๆ งานมักจะให้ความเร็วในการหมุนของเพลามอเตอร์ตามที่กำหนด โดยไม่ขึ้นกับโหลดปัจจุบัน
ไม่ใช่เรื่องยากที่จะเห็นว่าความเร็วของการหมุนของเพลามอเตอร์ไม่เพียงขึ้นอยู่กับแรงดันไฟฟ้าของมอเตอร์เท่านั้น แต่ยังขึ้นอยู่กับอิทธิพลภายนอกที่ไม่รู้จักต่อมอเตอร์ด้วย เช่น แรงเสียดทานแปรผัน โหลดที่เปลี่ยนแปลง อุณหภูมิ คุณภาพการหล่อลื่น และ ปัจจัยอื่นๆ ดังนั้นงานในการจัดหาความเร็วในการหมุนของเพลามอเตอร์ที่กำหนดจะลดลงเหลืองานสร้างแรงดันไฟฟ้าดังกล่าวบนเครื่องยนต์ที่จะให้ความเร็วการหมุนของเครื่องยนต์ที่กำหนดโดยไม่ขึ้นกับอิทธิพลของปัจจัยสุ่มภายนอก
การแก้ปัญหานี้โดยไม่มีทฤษฎี การควบคุมอัตโนมัติเป็นไปไม่ได้. การแก้ปัญหาประกอบด้วยการคำนวณและการนำไปใช้ ตัวควบคุมความเร็ว PID. ผู้เชี่ยวชาญของ Dean-Soft มีประสบการณ์ในการแก้ปัญหาดังกล่าว
ตัวควบคุม PID ให้ความเร็วที่กำหนดบนแอคทูเอเตอร์ (มอเตอร์) โดยไม่ขึ้นกับโหลดที่คงที่หรือเปลี่ยนแปลงอย่างช้าๆ ที่กระทำกับมัน
ตัวควบคุม PID เป็นตัวควบคุมสัดส่วน-อินทิกรัล-ดิฟเฟอเรนเชียล ตัวควบคุม PID ประกอบด้วยสัดส่วนตามลำดับ ( เค พี ) อินทิกรัล ( เค และ / ส ) และส่วนต่าง ( K d ส ) ลิงก์ แต่ละลิงก์มีกำไรของตัวเอง (รูปที่ 1)
ข้าว. 1. แผนภาพโครงสร้างของระบบควบคุมด้วยตัวควบคุม PID
ที่นี่: ส เป็นตัวดำเนินการ Laplace (บางครั้งเรียกว่า หน้า ). ถ้าเรานามธรรมจากการแปลง Laplace บันทึก K p, K และ / ส และ K d ส ควรใช้เป็นการกำหนดลิงก์ที่เกี่ยวข้องเท่านั้น ไม่ใช่นิพจน์ทางคณิตศาสตร์ และคุณไม่ควรมองหาความหมายอย่างแน่นอน ส เพราะอย่างที่บอกไปแล้วว่ามันเป็นโอเปอเรเตอร์ ไม่ใช่ตัวแปร
ในระบบ PID ความเร็วจริง วี(เสื้อ)มอเตอร์วัดโดยใช้ เซ็นเซอร์.
ที่อินพุตของระบบจุดกำหนดความเร็วมาถึง วี ตูด(เสื้อ)ในหน่วยเดียวกับความเร็วจริง
ข้อเสนอแนะ adderลบออกจากสัญญาณอ้างอิงความเร็ว วี ตูด (เสื้อ)สัญญาณความเร็วจริง วี(เสื้อ)และสร้างสัญญาณข้อผิดพลาด e (t) ที่เอาต์พุต:
สัญญาณผิดพลาดถูกส่งไปยัง สัดส่วน, อินทิกรัลและ ความแตกต่างลิงค์ของตัวควบคุม PID
ลิงค์สัดส่วนคูณสัญญาณข้อผิดพลาด e ด้วยปัจจัย เค พีและสร้างสัญญาณออก y พี.
ลิงค์รวมรวมสัญญาณ e (t) เมื่อเวลาผ่านไป คูณด้วยปัจจัย เค และและสร้างสัญญาณออก y และ.
ลิงค์ส่วนต่างแยกความแตกต่างของสัญญาณข้อผิดพลาดตามเวลา e (t) คูณผลลัพธ์ด้วยตัวเลข K dและการสร้างสัญญาณเอาต์พุต y d.
ตัวสะสมตัวควบคุม PIDรวมสัญญาณ y พี(เสื้อ), y และ(เสื้อ)และ y d(เสื้อ)และสร้างสัญญาณออก y(t):
PWM และสวิตช์ไฟออกแบบมาเพื่อส่งสัญญาณเอาต์พุตที่คำนวณได้ไปยังเครื่องยนต์ y(t).
การคำนวณค่าสัมประสิทธิ์ของตัวควบคุม PID
ไม่ยากที่จะดูว่าตัวควบคุม PID มีลักษณะสามค่าสัมประสิทธิ์ เค พี, เค และและ K d. ในการคำนวณค่าสัมประสิทธิ์เหล่านี้ จำเป็นต้องทราบพารามิเตอร์ของวัตถุควบคุม ซึ่งในกรณีนี้คือเครื่องยนต์
โครงสร้างและพารามิเตอร์ของวัตถุควบคุม
จากมุมมองของทฤษฎีการควบคุมอัตโนมัติ เครื่องยนต์ กระแสตรงอธิบายโดยประมาณโดย: ลิงค์ aperiodic สองลิงค์พร้อมค่าคงที่เวลาไฟฟ้า ที อีและค่าคงที่เวลาเชิงกล ที ม. อัตราขยายของมอเตอร์โดยรวม เค.มอเตอร์(รูปที่ 2) ในความเป็นจริง, รูปแบบโครงสร้างเครื่องยนต์มีความซับซ้อนมากขึ้น แต่สิ่งนี้ไม่สำคัญสำหรับเราในกรณีนี้

ข้าว. 2. แผนภาพโครงสร้างของเครื่องยนต์จากมุมมองของทฤษฎีการควบคุมอัตโนมัติ
ฟังก์ชั่นการถ่ายโอนมอเตอร์เขียนในรูปของตัวดำเนินการ Laplace สดังต่อไปนี้:
การเพิ่มเครื่องยนต์เค.มอเตอร์ กำหนดสัดส่วนระหว่างความเร็วในการหมุนของเพลาเครื่องยนต์ที่ไม่ได้ใช้งานและแรงดันไฟฟ้าที่ใช้กับอินพุต พูดง่ายๆ ก็คือ อัตราส่วนจะเท่ากับอัตราส่วนของความเร็วรอบเดินเบา วี xxและพิกัดแรงดันไฟฟ้าของมอเตอร์ คุณ.
แรงดันไฟฟ้าของมอเตอร์ในเทคโนโลยีไมโครโปรเซสเซอร์ตั้งค่าเป็นหน่วยแรงดันทั่วไป และความเร็วจะอยู่ในหน่วยความเร็วทั่วไป
หากใช้ PWM 7 บิตเพื่อสร้างแรงดันไฟฟ้าบนมอเตอร์ (ดูด้านล่าง) ให้คำนวณ เค.มอเตอร์ค่าของแรงดันไฟฟ้าที่กำหนดคือ 128 หน่วยแรงดันไฟฟ้าทั่วไป
ความเร็วรอบเดินเบา ว xxที่ระบุในข้อมูลพาสปอร์ตของเครื่องยนต์ ควรอ่านซ้ำในหน่วยความเร็วปกติ วีxxกำหนดโดยวิธีการติดตั้งเซ็นเซอร์ความเร็ว
ตัวอย่างเช่น สมมติว่าใช้เอ็นโค้ดเดอร์ส่วนเพิ่มเพื่อวัดความเร็ว ซึ่งอยู่ที่เพลามอเตอร์และมีเครื่องหมาย 512 ต่อรอบ ให้วัดความเร็วในหน่วยทั่วไปเป็นจำนวนคะแนนต่อรอบการคำนวณ ง ที. ให้รอบการคำนวณที่ได้รับจากการประเมินประสิทธิภาพของอัลกอริทึมมีค่าเท่ากับ 0.001 วินาที ปล่อยให้รอบเดินเบาของเครื่องยนต์ ว xx=5,000 รอบต่อนาที
ลองแปลความเร็วเครื่องยนต์เป็นเครื่องหมายเซ็นเซอร์ เราได้รับ: 5000x512 = 2560000 คะแนน / นาที ลองแปลงนาทีเป็นรอบการคำนวณ:
หากไม่ทราบพารามิเตอร์ของเครื่องยนต์ ความเร็วรอบเดินเบาจะถูกกำหนดโดยการทดลอง เมื่อต้องการทำเช่นนี้ ที่ไม่ได้ใช้งาน แรงดันไฟฟ้าสูงสุดจะถูกนำไปใช้กับเครื่องยนต์และการอ่านค่าจะถูกนำมาจากเซ็นเซอร์ความเร็ว วี xx.
เวลาคงที่ทางกล ที ม ขึ้นอยู่กับโมเมนต์ความเฉื่อยของเพลามอเตอร์ กระปุกเกียร์ ความเฉื่อย อุปกรณ์ผู้บริหาร. โดยปกติแล้วจะไม่สามารถคำนวณค่าของมันในเชิงวิเคราะห์ได้ ดังนั้นจึงวัดได้จากการทดลอง
ในการทำเช่นนี้ แรงดันไฟฟ้าสูงสุดจะถูกจ่ายอย่างกะทันหันกับเครื่องยนต์ที่โหลดที่กำหนด และกระบวนการชั่วคราวของการเปลี่ยนแปลงความเร็วจะถูกลบออก วี(เสื้อ).
ความเร็วนั้นนำมาจากเซ็นเซอร์ความเร็วในเวลาที่ไม่ต่อเนื่อง บันทึกใน RAM ของไมโครโปรเซสเซอร์ แล้วถ่ายโอนไปยังคอมพิวเตอร์ส่วนบุคคล คอมพิวเตอร์ส่วนบุคคลสร้างกราฟการเปลี่ยนแปลงความเร็วขึ้นใหม่ วี(เสื้อ)(รูปที่ 3)
 |
ข้าว. 3. กระบวนการชั่วคราวในมอเตอร์กระแสตรง
ตามกราฟชั่วคราวสามารถระบุได้ ประการแรก ความเร็วรอบเดินเบา วี xxและประการที่สอง เวลาควบคุม ที พี. เวลาควบคุมถูกกำหนดโดยเวลาสิ้นสุดของกระบวนการชั่วคราว (เวลาที่เส้นโค้งชั่วคราวแตกต่างกันน้อยกว่า 1% จากค่าสถานะคงตัว)
หากเราละเลยอิทธิพลเล็กน้อยของค่าคงที่เวลาไฟฟ้า ที อีโดยปกติจะเป็นลำดับความสำคัญที่เล็กกว่าค่าคงที่เวลาเชิงกล ที มจากนั้นกระบวนการชั่วคราวในมอเตอร์กระแสตรงสามารถพิจารณาได้เป็นระยะโดยมีค่าคงที่ ที ม.
เป็นที่ทราบกันดีว่าเวลาของกระบวนการชั่วคราวแบบไม่มีคาบนั้นยาวกว่าค่าคงที่ของเวลาถึงห้าเท่า เหล่านั้น.:
ดังนั้นสำหรับกรณีของเรา เราได้รับ:
ในกรณีของเรา เวลาควบคุม ที พีตัดสินโดยกราฟ เท่ากับ 1.5 วินาที จากนั้นค่าคงที่เวลาเชิงกล ที ม= 1.5/5 = 0.3 วินาที
ดังนั้น เมื่อพล็อตกราฟกระบวนการชั่วคราวแล้ว เราจะพบค่าคงที่ของเวลาเชิงกล ที ม.
ค่าคงที่เวลาไฟฟ้าที อี กำหนดความเฉื่อยของการดึงดูดของกระดองมอเตอร์และเท่ากับอัตราส่วนของความเหนี่ยวนำของกระดองมอเตอร์ต่อความต้านทานของขดลวด:
ในทางปฏิบัติ พารามิเตอร์การเหนี่ยวนำกระดองเป็นเรื่องยากที่จะวัด จากนั้นจึงใช้ค่าคงที่เวลาไฟฟ้าในลำดับความสำคัญน้อยกว่าค่าคงที่เวลาเชิงกล:
นี่เป็นเรื่องจริงสำหรับเครื่องยนต์ส่วนใหญ่
การคำนวณค่าสัมประสิทธิ์ของตัวควบคุม PID
ในการคำนวณค่าสัมประสิทธิ์ของตัวควบคุม PID เราควรแก้ปัญหาผกผันของไดนามิก ในการทำเช่นนี้ เราสรุปจากตัวควบคุม PID เราจะถือว่าโครงสร้างตัวควบคุมคือ ฟังก์ชั่นการถ่ายโอนของมัน ว พี(s) ไม่เป็นที่รู้จักสำหรับเรา สำหรับสิ่งนี้ ฟังก์ชันถ่ายโอนของวัตถุควบคุมเป็นที่รู้จัก วดีวี(วินาที)(รูปที่ 4)

ข้าว. 4. โครงร่างเริ่มต้นสำหรับการคำนวณตัวควบคุมสำหรับมอเตอร์กระแสตรง
เราเขียนฟังก์ชันการถ่ายโอนของระบบปิด ว ส (ส):
มาดูกันว่ากระบวนการชั่วคราวใดในระบบที่เหมาะกับเรา เราค่อนข้างพอใจกับกระบวนการชั่วคราวแบบ aperiodic ในระบบ นี่คือวิธีที่ระบบควรตอบสนองต่อการเปลี่ยนแปลงความเร็วและโหลด
ให้เวลาคงที่ที่ต้องการของชั่วคราว ตจะเท่ากันโดยประมาณ ที ม. เหล่านั้น. ฟังก์ชั่นการถ่ายโอนของระบบที่ต้องการ ว(ส) เท่ากับ:
ให้เราถือเอาฟังก์ชันการถ่ายโอนของระบบปิดกับฟังก์ชันการถ่ายโอนของระบบที่ต้องการ:
ด้วยการแปลงทางคณิตศาสตร์อย่างง่าย เราจะแสดงนิพจน์สำหรับฟังก์ชันถ่ายโอนของคอนโทรลเลอร์จากที่นี่ ว พี(วินาที):
แทนค่า ดับบลิว มอเตอร์(s):
มาแนะนำค่าสัมประสิทธิ์:
เราได้รับ:
ดูไม่ยากว่าเราเพิ่งได้ค่าสัมประสิทธิ์มา ค 1 ค่าสัมประสิทธิ์ก่อนลิงค์รวม กับ 2 และค่าสัมประสิทธิ์หน้าลิงค์ดิฟเฟอเรนเชียล ค 3 . เหล่านั้น. เราได้โครงสร้างตัวควบคุม PID แบบคลาสสิกพร้อมพารามิเตอร์ เค พี=กับ 1 , เค และ=ค 2 และ K d=ค 3 :
การใช้งานตัวควบคุม PID บนไมโครโปรเซสเซอร์ดิจิทัล
ขณะนี้ระบบที่มีตัวควบคุม PID ใช้งานแบบดิจิทัลเท่านั้น และการคำนวณกฎการควบคุมดำเนินการโดยไมโครโปรเซสเซอร์ราคาถูกของ AVR หรือ MCS -51 ซีรีส์ โปรดทราบว่าไมโครโปรเซสเซอร์เป็นจำนวนเต็มและไม่สนับสนุนการทำงานของทศนิยม สิ่งนี้ต้องการให้โปรแกรมเมอร์ปรับอัลกอริทึมให้เหมาะสม
ในระบบ PID ความเร็วของมอเตอร์จะถูกวัดโดยใช้เซ็นเซอร์ ความเร็วจริงวัดเป็นหน่วยความเร็วตามเงื่อนไขจำนวนเต็ม โดยปกติแล้วหน่วยความเร็วทั่วไปจะถูกเลือกในลักษณะที่ความเร็วใน c.u. เปลี่ยนในช่วงจาก -127 เป็น 127 (หนึ่งไบต์) ในกรณีที่รุนแรงจาก -15 เป็น 15 (ความเร็วจะถูกกำหนดโดยระยะขอบ) แต่ไม่ว่าในกรณีใดจำนวนความเร็วที่เพิ่มขึ้นไม่ควรน้อยกว่าจำนวนความเร็วที่กำหนด
สามารถวัดความเร็วได้โดยเซ็นเซอร์ต่อไปนี้:
ความเร็วที่กำหนดป้อนเข้าระบบในหน่วยธรรมดาเดียวกันกับความเร็วจริง โดยปกติความเร็วที่ตั้งไว้จะถูกส่งจากโปรเซสเซอร์ควบคุมระดับสูงหรือคอมพิวเตอร์ส่วนบุคคล และจัดเก็บไว้ในเซลล์หน่วยความจำที่เหมาะสมของไมโครโปรเซสเซอร์
ข้อเสนอแนะ adderลบจากความเร็วที่ตั้งไว้ วี ตูดความเร็วที่แท้จริง วีและรับสัญญาณข้อผิดพลาดที่เรียกว่า อี:
พิจารณาว่าความเร็ว วี ตูดและ วีเป็นจำนวนเต็มในช่วง -127 ถึง 127 การดำเนินการนี้ดำเนินการค่อนข้างง่ายกับไมโครโปรเซสเซอร์จำนวนเต็ม ควรมั่นใจว่าได้ผล ถ้าอี<-127 , то e =127, а если e >12 7 แล้ว e = 127
สัญญาณผิดพลาด อีป้อนอินพุตของตัวควบคุม PID เช่น บนลิงค์สัดส่วนอินทิกรัลและดิฟเฟอเรนเชียล
ลิงค์สัดส่วนสร้างสัญญาณเอาต์พุต y พีโดยการคูณสัญญาณข้อผิดพลาดทันทีด้วยปัจจัย เค พี.
ค่าสัมประสิทธิ์ เค พีมักจะแสดงค่าที่ไม่ใช่จำนวนเต็มระหว่าง 0.5 ถึง 2 ดังนั้น ในการคูณจำนวนเต็มหนึ่งไบต์ อีสำหรับค่าสัมประสิทธิ์นี้ให้ใช้ตาราง เค พีฉันซึ่งคำนวณล่วงหน้า:
สำหรับ ฉัน =-127...127นอกจากนี้ตัวเลขในตารางยังคำนึงถึงข้อ จำกัด ของผลลัพธ์ซึ่งควรกลายเป็นหนึ่งไบต์ไม่เกินค่า 127 นั่นคือหากผลการคูณมากกว่า 127 ให้เท่ากับ 127 และถ้าน้อยกว่า -127 ก็ให้เท่ากับ -127
โปรแกรมเมอร์ควรเข้าใจว่าโปรเซสเซอร์พิจารณาหมายเลขที่ลงนาม ฉันเนื่องจากเป็นดัชนีตารางที่ไม่ได้ลงชื่อ ดังนั้นองค์ประกอบตารางที่มีดัชนีตั้งแต่ -128 ถึง -1 จะอยู่ในช่วงดัชนีตั้งแต่ 128 ถึง 255
จากนั้นคูณด้วยค่าสัมประสิทธิ์ เค พีแทนที่ด้วยการเลือกองค์ประกอบตาราง เค พีฉันด้วยดัชนี จ :
โดยปกติแล้วตารางจะถูกคำนวณบนคอมพิวเตอร์ส่วนบุคคลและแฟลชลงในหน่วยความจำไมโครโปรเซสเซอร์
ลิงค์รวมสร้างสัญญาณเอาต์พุต y และโดยการรวมสัญญาณข้อผิดพลาด อีตามเวลาและคูณด้วยค่าสัมประสิทธิ์ เค และ.
ที่นี่: ต- เวลาตั้งแต่เริ่มงาน
ไมโครโปรเซสเซอร์ดิจิทัลจะคำนวณอินทิกรัลโดยการอินทิเกรตแบบขั้นบันไดเท่ากับรอบสัญญาณนาฬิกาของตัวจับเวลา D ที. ดังนั้น สำหรับกรณีไม่ต่อเนื่อง สูตรจะถูกแทนที่ด้วย:
ที่นี่ k คือจำนวนรอบของการคำนวณที่ผ่านไปตั้งแต่เริ่มทำงาน
พิจารณาผลรวมของทั้งหมด อีเค. โดยพื้นฐานแล้ว เป็นเพียงผลรวมของค่าทั้งหมด จ ,ได้รับในแต่ละรอบ ผลรวมนี้เรียกว่าผลรวมอินทิกรัล ส (อย่าสับสนกับ ส - ตัวดำเนินการ Laplace) ผลรวมอินทิกรัลถูกนำไปใช้เป็นตัวแปรส่วนกลางและเพิ่มขึ้นในแต่ละรอบตามค่าปัจจุบันของสัญญาณข้อผิดพลาด จ :
เมื่อคำนวณตัวควบคุม PID ค่าสัมประสิทธิ์ เค และโดยปกติจะอยู่ระหว่าง 0.05 ถึง 2 รอบการคำนวณ D ที 0.0001 ถึง 0.002 วินาที ดังนั้นค่าสัมประสิทธิ์ เค และง ทีคือตั้งแต่ 5·10 -6 ถึง 4·10 - 3 เพราะ ค่าสัมประสิทธิ์นี้มีค่าน้อยกว่า 1 มาก ดังนั้นปัญหาของการคูณจำนวนเต็มจึงเกิดขึ้นตั้งแต่นั้นมา หลังจากการคูณจะเป็นศูนย์เสมอ
เพื่อแก้ปัญหานี้ ลองคูณค่าสัมประสิทธิ์กัน เค และง ทีสำหรับตัวเลขขนาดใหญ่ ก และหารผลรวมอินทิกรัลด้วยจำนวนเดียวกัน:

แสดงถึงผลิตภัณฑ์ เค และง ที · ก ผ่านค่าสัมประสิทธิ์ ข :
มาเลือกเบอร์กัน ก , ผลคูณของ 256 xต่ออัตราส่วน ข อยู่ในช่วงตั้งแต่ 0.05 ถึง 5
เพื่อคำนวณอัตราส่วน ส/อ ขยายสัญลักษณ์ของตัวเลข ส :
ใช้การคำนวณ 16 บิต ส, ถ้า ก =256;
ใช้การคำนวณแบบ 24 บิต ส, ถ้า ก =256 2 ;
ใช้การคำนวณแบบ 32 บิต ส, ถ้า ก =256 3 .
การเพิ่มหมายเลขที่มีลายเซ็น 16, 24 หรือ 32 บิตไม่ใช่เรื่องยาก ส หมายเลข 8 บิตที่เซ็นชื่อ อี. อย่าลืมว่าถ้า อีหากเป็นบวก ส่วนขยายเครื่องหมายจะเติมบิตลำดับสูงด้วยศูนย์ และถ้าเป็นค่าลบ บิตลำดับสูงจะถูกเติมด้วยบิตลำดับสูง เพื่อจำกัดการสะสมของผลรวม เราใช้ขีดจำกัดบนและล่าง โดยปกติจะทำดังนี้: หากบิต (เครื่องหมาย) ที่สำคัญที่สุดไม่เท่ากับบิตสุดท้าย การเติบโตของผลรวมรวมควรถูกระงับ
จำได้ว่าการหารจำนวนใด ๆ ด้วยจำนวน 256 xเทียบเท่ากับการเลื่อนไปทางขวา xไบต์ทางขวา มาใช้กฎนี้กันเถอะ รับเฉพาะไบต์สูงของผลรวมอินทิกรัล ส : ในกรณีของการนับแบบ 16 บิต จะเทียบเท่ากับการเลื่อนทีละหนึ่งไบต์ ในกรณีของการนับแบบ 24 บิต - ทีละสองไบต์ ในกรณีของการนับแบบ 32 บิต - ทีละสามไบต์
ดังนั้น:
ที่ไหน: ส อาวุโส- ไบต์สูงของตัวเลข ส .
คูณด้วยตัวประกอบ ข ดำเนินการในรูปแบบของตาราง ข ฉันคล้ายกับการคำนวณค่าสัมประสิทธิ์ของการเชื่อมโยงตามสัดส่วน:
ลิงค์ส่วนต่าง
วงจรอนุพันธ์คำนวณสัญญาณเอาต์พุต y d - e 0 เราดำเนินการในรูปแบบของตาราง ค ฉันเช่นเดียวกับในการคำนวณลิงค์สัดส่วน:
ตัวสะสมตัวควบคุม PID
ตัวบวกหลังจากตัวควบคุม PID เพิ่มค่าทันทีของสัญญาณ y พี, y และและ y dและสร้างสัญญาณออก ย:
เมื่อหาผลรวม คุณควรตรวจสอบให้แน่ใจว่าผลลัพธ์อยู่ในช่วงตั้งแต่ -127 ถึง +127 โดยใช้ผลรวม 16 บิต ตัวอย่างเช่น หากผลลัพธ์มากกว่า 127 ควรเท่ากับ 127 และถ้าน้อยกว่า -127 ให้เท่ากับ -127
สัญญาณ PWM ถูกสร้างขึ้นโดยอัตโนมัติโดยไมโครโปรเซสเซอร์ AVR ไมโครโปรเซสเซอร์หนึ่งตัวสามารถสร้างสัญญาณฮาร์ดแวร์ PWM ได้สูงสุด 3 ตัว นอกจากนี้ สัญญาณ PWM ยังสามารถสร้างขึ้นโดยทางโปรแกรมด้วยตัวจับเวลา
สะดวกในการสร้าง PWM 7 บิต ในกรณีนี้ สามารถเชื่อมต่อสวิตช์ควบคุมไฟได้ตามแผนผังที่แสดงในรูปที่ 4.
ข้าว. 4. วิธีเชื่อมต่อสวิตช์ไฟกับเอาต์พุต PWM
บิตสูง (สัญญาณ) ของผลลัพธ์ ยเป็นเอาต์พุตผ่านขา I / O ใด ๆ ไปยังหนึ่งในอินพุตของสวิตช์เปิดปิด และ 7 บิตที่เหลือ (บิตสุดท้ายถูกตั้งค่าเป็นศูนย์) ที่ไม่มีการแปลงใด ๆ สามารถโหลดลงในรีจิสเตอร์การสร้างคัตออฟ PWM
มาพิสูจน์กันเลย
คิวอีดี





