ในระบบที่ใช้วิธีการควบคุมนี้ เนื่องจากการมีอยู่ของฮิสเทรีซิสและสัญญาณควบคุมที่จำกัด ค่าจริงของพารามิเตอร์จะผันผวนเป็นระยะเสมอเมื่อเทียบกับค่าที่ตั้งไว้ กล่าวคือ จะมีความไม่ตรงกันเสมอ เป็นไปได้ที่จะเพิ่มความแม่นยำในการควบคุมเล็กน้อยโดยการลดฮิสเทรีซิสสวิตชิ่ง แต่สิ่งนี้นำไปสู่การเพิ่มขึ้นของความถี่สวิตชิ่งของรีเลย์เอาต์พุตและลดลง วงจรชีวิต. ดังนั้น ตัวควบคุมประเภทนี้ไม่เหมาะสำหรับงานที่พารามิเตอร์ควบคุมมีไดนามิกสูงและต้องมีการบำรุงรักษาค่าพารามิเตอร์ควบคุมอย่างแม่นยำ การใช้งานลิมิตคอนโทรลเลอร์ที่เป็นไปได้ - วัตถุที่มีความเฉื่อยสูงและความต้องการต่ำสำหรับความแม่นยำในการควบคุม
การควบคุม PID
คุณสามารถปรับปรุงความถูกต้องของกฎระเบียบได้อย่างมากโดยใช้กฎหมาย PID (กฎหมายควบคุมตามสัดส่วน-ส่วนประกอบสำคัญ-ส่วนต่าง)
ในการบังคับใช้กฎหมาย PID จะใช้ตัวแปรหลักสามตัว:
P – แถบสัดส่วน, %;
ฉัน – เวลารวม s;
D คือเวลาการแตกตัว s
การปรับจูนคอนโทรลเลอร์ PID ด้วยตนเอง (การกำหนดค่าของพารามิเตอร์ P, I, D) ซึ่งให้คุณภาพการควบคุมที่จำเป็นนั้นค่อนข้างซับซ้อนและไม่ค่อยได้ใช้ในทางปฏิบัติ คอนโทรลเลอร์ PID ซีรีส์ UT/UP ให้การปรับแต่งพารามิเตอร์ PID อัตโนมัติสำหรับกระบวนการควบคุมเฉพาะ ในขณะที่ยังคงความเป็นไปได้ของการปรับด้วยตนเอง
สัดส่วน
ในแถบสัดส่วนที่กำหนดโดยสัมประสิทธิ์ P สัญญาณควบคุมจะเปลี่ยนตามสัดส่วนกับความแตกต่างระหว่างค่าที่ตั้งไว้และค่าจริงของพารามิเตอร์ (ไม่ตรงกัน):
สัญญาณควบคุม = 100/P E,
โดยที่ E คือค่าที่ไม่ตรงกัน
สัมประสิทธิ์ของสัดส่วน (เกน) K เป็นสัดส่วนผกผันกับ P:
แถบสัดส่วนถูกกำหนดโดยสัมพันธ์กับ setpoint ของการควบคุมที่ตั้งไว้ และภายในแถบนี้ สัญญาณควบคุมจะเปลี่ยนจาก 0 เป็น 100% กล่าวคือ หากค่าจริงและ setpoint เท่ากัน สัญญาณเอาท์พุตจะมีค่า 50%
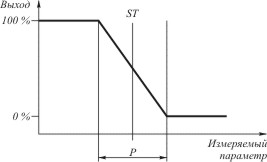
โดยที่ P คือแถบสัดส่วน
ST - จุดกำหนดระเบียบ
ตัวอย่างเช่น:
ช่วงการวัด 0…1000 °С;
ชุดควบคุมจุด ST = 500 °С;
แถบสัดส่วน P = 5% ซึ่งเท่ากับ 50 °C (5% ของ 1,000 °C);
ที่อุณหภูมิ 475 °C และต่ำกว่า สัญญาณควบคุมจะมีค่า 100% ที่ 525 °C และสูงกว่า - 0% ในช่วง 475…525 °C (ในแถบสัดส่วน) สัญญาณควบคุมจะเปลี่ยนตามสัดส่วนของค่าที่ไม่ตรงกันโดยมีเกน K = 100/P = 20
การลดค่าของแถบสัดส่วน P จะเพิ่มการตอบสนองของคอนโทรลเลอร์ต่อค่าที่ไม่ตรงกัน กล่าวคือ ค่าที่ไม่ตรงกันเล็กน้อยจะสอดคล้องกับค่าที่มากขึ้นของสัญญาณควบคุม แต่ในขณะเดียวกัน เนื่องจากเกนได้มาก กระบวนการจึงใช้ลักษณะการสั่นรอบๆ ค่าเซ็ตพอยต์ และไม่สามารถควบคุมที่แม่นยำได้ ด้วยการเพิ่มแถบสัดส่วนที่มากเกินไป ตัวควบคุมจะตอบสนองช้าเกินไปต่อผลลัพธ์ที่ไม่ตรงกัน และจะไม่สามารถติดตามการเปลี่ยนแปลงของกระบวนการได้ เพื่อชดเชยข้อเสียเหล่านี้ของการควบคุมตามสัดส่วน จึงมีการแนะนำคุณลักษณะเวลาเพิ่มเติม - องค์ประกอบที่สำคัญ
ส่วนประกอบสำคัญ
มันถูกกำหนดโดยค่าคงที่เวลารวม I เป็นฟังก์ชันของเวลาและให้การเปลี่ยนแปลงในเกน (การเปลี่ยนแปลงของแถบสัดส่วน) ในช่วงเวลาที่กำหนด
สัญญาณควบคุม = 100/P E + 1/I ∫ E dt.
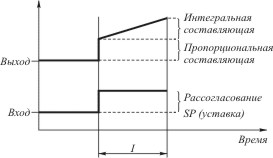
ดังที่เห็นได้จากรูป หากองค์ประกอบตามสัดส่วนของกฎหมายควบคุมไม่ได้ทำให้ความไม่ตรงกันลดลง ส่วนประกอบที่สำคัญจะเริ่มค่อยๆ เพิ่มอัตราขยายในช่วงเวลา I หลังจากช่วงเวลาหนึ่ง I กระบวนการนี้จะทำซ้ำ หากความไม่ตรงกันมีขนาดเล็ก (หรือลดลงอย่างรวดเร็ว) อัตราขยายจะไม่เพิ่มขึ้น และหากค่าของพารามิเตอร์เท่ากับการตั้งค่าที่ระบุ จะใช้ค่าต่ำสุดบางค่า ในเรื่องนี้ ส่วนประกอบสำคัญเรียกว่าฟังก์ชันปิดระบบควบคุมอัตโนมัติ ในกรณีของการควบคุม PID การตอบสนองของขั้นตอนของกระบวนการจะเป็นความผันผวนที่ค่อย ๆ ลดลงไปสู่ค่าที่ตั้งไว้
เงื่อนไขอนุพันธ์
ออบเจ็กต์ควบคุมจำนวนมากค่อนข้างเฉื่อย กล่าวคือ มีความล่าช้าในการตอบสนองต่อการดำเนินการที่ใช้ (เวลาตาย) และตอบสนองต่อไปหลังจากลบการดำเนินการควบคุม (เวลาหน่วง) ตัวควบคุม PID บนวัตถุดังกล่าวจะล่าช้าเสมอเมื่อเปิด/ปิดสัญญาณควบคุม เพื่อขจัดผลกระทบนี้ จึงมีการแนะนำองค์ประกอบดิฟเฟอเรนเชียล ซึ่งกำหนดโดยค่าคงที่เวลาของดิฟเฟอเรนติเอชัน D และมีการบังคับใช้กฎหมายควบคุม PID อย่างเต็มรูปแบบ องค์ประกอบดิฟเฟอเรนเชียลคืออนุพันธ์ด้านเวลาของค่าที่ไม่ตรงกัน นั่นคือ เป็นฟังก์ชันของอัตราการเปลี่ยนแปลงของพารามิเตอร์ควบคุม ในกรณีที่ไม่ตรงกันกลายเป็น ค่าคงที่, องค์ประกอบที่แตกต่างหยุดที่จะส่งผลกระทบต่อสัญญาณควบคุม
สัญญาณควบคุม = 100/P E + 1/I ∫ E dt + D d/dt E.
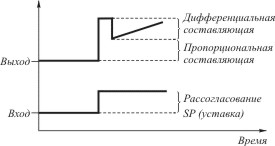
ด้วยการแนะนำส่วนประกอบที่แตกต่างกัน ตัวควบคุมจะเริ่มพิจารณาเวลาตายและเวลาหน่วง โดยเปลี่ยนสัญญาณควบคุมล่วงหน้า ซึ่งทำให้สามารถลดความผันผวนของกระบวนการรอบๆ ค่าที่ตั้งไว้ได้อย่างมาก และเพื่อให้การดำเนินการชั่วคราวเสร็จสิ้นเร็วขึ้น
ดังนั้น เมื่อสร้างสัญญาณควบคุม ตัวควบคุม PID จะคำนึงถึงลักษณะของวัตถุควบคุมด้วย เช่น วิเคราะห์ความไม่ตรงกันสำหรับขนาด ระยะเวลา และอัตราการเปลี่ยนแปลง กล่าวอีกนัยหนึ่ง ตัวควบคุม PID "คาดการณ์" ปฏิกิริยาของวัตถุควบคุมกับสัญญาณควบคุม และเริ่มเปลี่ยนการดำเนินการควบคุมไม่ใช่เมื่อถึงค่าที่ตั้งไว้ แต่เป็นการล่วงหน้า
เมื่อสร้างอุปกรณ์อัตโนมัติต่างๆ งานมักจะให้ความเร็วของการหมุนของเพลามอเตอร์ที่กำหนด โดยไม่ขึ้นกับโหลดปัจจุบัน
ไม่ใช่เรื่องยากที่จะเห็นได้ว่าความเร็วของการหมุนของเพลามอเตอร์ไม่เพียงขึ้นอยู่กับแรงดันไฟฟ้าของมอเตอร์เท่านั้น แต่ยังขึ้นกับอิทธิพลภายนอกที่ไม่ทราบถึงมอเตอร์ด้วย เช่น แรงเสียดทานผันแปร ภาระที่เปลี่ยนแปลง อุณหภูมิ คุณภาพการหล่อลื่น และ ปัจจัยอื่นๆ ดังนั้นงานในการให้ความเร็วการหมุนของเพลามอเตอร์ที่กำหนดจึงลดลงเป็นงานสร้างแรงดันไฟฟ้าดังกล่าวบนเครื่องยนต์ที่จะให้ความเร็วรอบการหมุนของเครื่องยนต์ที่กำหนด โดยไม่ขึ้นกับอิทธิพลของปัจจัยสุ่มภายนอก
การแก้ปัญหานี้โดยไม่มีทฤษฎี ระบบควบคุมอัตโนมัติเป็นไปไม่ได้. การแก้ปัญหาประกอบด้วยการคำนวณและการดำเนินการ ตัวควบคุมความเร็ว PID. ผู้เชี่ยวชาญของ Dean-Soft มีประสบการณ์ในการแก้ปัญหาดังกล่าว
ตัวควบคุม PID ให้ความเร็วที่กำหนดบนแอคทูเอเตอร์ (มอเตอร์) โดยไม่ขึ้นกับภาระที่คงที่หรือเปลี่ยนแปลงช้าๆ ที่กระทำต่อมัน
ตัวควบคุม PID เป็นตัวควบคุมตามสัดส่วน-อินทิกรัล-ดิฟเฟอเรนเชียล ตัวควบคุม PID ประกอบด้วยสัดส่วนตามสัดส่วน ( K p ) อินทิกรัล ( เค และ / ส ) และส่วนต่าง ( K d ส ) ลิงค์แต่ละอันมีกำไรของตัวเอง (รูปที่ 1)
ข้าว. 1. แผนภาพโครงสร้างของระบบควบคุมที่มีตัวควบคุม PID
ที่นี่: ส เป็นตัวดำเนินการ Laplace (บางครั้งเรียกว่า พี ). หากเราแยกจากการแปลง Laplace แล้วบันทึก K p, K และ / ส และ K d ส ควรใช้เป็นการกำหนดลิงก์ที่เกี่ยวข้องเท่านั้น ไม่ใช่เป็นนิพจน์ทางคณิตศาสตร์ และไม่ควรมองหาความหมายอย่างแน่นอน ส เพราะอย่างที่บอกไปแล้วว่าเป็นโอเปอเรเตอร์ ไม่ใช่ตัวแปร
ในระบบ PID ความเร็วจริง วี(ท)มอเตอร์วัดโดยใช้ เซ็นเซอร์.
ที่อินพุตระบบความเร็วที่กำหนดมาถึง วี ass(ท)ในหน่วยเดียวกับความเร็วจริง
ข้อเสนอแนะ adderลบออกจากสัญญาณอ้างอิงความเร็ว วี ก้น (เสื้อ)สัญญาณความเร็วจริง วี(ท)และสร้างสัญญาณผิดพลาด e (t) ที่เอาต์พุต:
ส่งสัญญาณผิดพลาดไปที่ สัดส่วน, อินทิกรัลและ ดิฟเฟอเรนเชียลลิงค์ของตัวควบคุม PID
ลิงค์ตามสัดส่วนคูณสัญญาณผิดพลาด e ด้วยตัวประกอบ K pและสร้างสัญญาณเอาท์พุต y p.
ลิงค์อินทิกรัลรวมสัญญาณ e (t) เมื่อเวลาผ่านไปคูณด้วยตัวประกอบ K และและสร้างสัญญาณเอาท์พุต y และ.
ลิงค์ดิฟเฟอเรนเชียลแยกความแตกต่างของสัญญาณข้อผิดพลาดตามเวลา e (t) คูณผลลัพธ์ด้วยตัวเลข K dและการสร้างสัญญาณเอาท์พุต y d.
ตัวสะสมคอนโทรลเลอร์ PIDรวมสัญญาณ y p(ท), y และ(ท)และ y d(ท)และสร้างสัญญาณเอาท์พุต ญ(ท):
PWM และสวิตช์ไฟออกแบบมาเพื่อส่งสัญญาณเอาต์พุตที่คำนวณไปยังเครื่องยนต์ ญ(ท).
การคำนวณค่าสัมประสิทธิ์ของตัวควบคุม PID
ไม่ยากเลยที่จะเห็นว่าตัวควบคุม PID นั้นมีลักษณะเด่นด้วยสามค่าสัมประสิทธิ์ K p, K และและ K d. ในการคำนวณค่าสัมประสิทธิ์เหล่านี้ จำเป็นต้องทราบพารามิเตอร์ของวัตถุควบคุม ในกรณีนี้คือเครื่องยนต์
โครงสร้างและพารามิเตอร์ของวัตถุควบคุม
จากมุมมองของทฤษฎีการควบคุมอัตโนมัติ เครื่องยนต์ กระแสตรงอธิบายโดยประมาณโดย: ลิงค์ aperiodic สองตัวพร้อมค่าคงที่เวลาทางไฟฟ้า ทีอีและค่าคงที่เวลาเชิงกล T m. กำไรของมอเตอร์โดยรวม เค มอเตอร์(รูปที่ 2). ในความเป็นจริง, แบบแผนโครงสร้างเครื่องยนต์ซับซ้อนกว่ามาก แต่ในกรณีนี้ไม่สำคัญสำหรับเรา

ข้าว. 2. แผนภาพโครงสร้างของเครื่องยนต์จากมุมมองของทฤษฎีการควบคุมอัตโนมัติ
ฟังก์ชั่นการถ่ายโอนมอเตอร์, เขียนในแง่ของตัวดำเนินการ Laplace สต่อไปนี้:
กำไรของเครื่องยนต์เค มอเตอร์ กำหนดสัดส่วนระหว่างความเร็วรอบการหมุนของเพลาเครื่องยนต์เมื่อรอบเดินเบาและแรงดันไฟฟ้าที่ใช้กับอินพุต พูดง่ายๆ อัตราส่วนจะเท่ากับอัตราส่วนความเร็วรอบเดินเบา วี xxและแรงดันไฟฟ้าของมอเตอร์ คุณหนู.
แรงดันไฟฟ้าของมอเตอร์ในเทคโนโลยีไมโครโปรเซสเซอร์ถูกตั้งค่าในหน่วยแรงดันไฟฟ้าแบบทั่วไป และความเร็วจะถูกกำหนดในหน่วยความเร็วแบบเดิม
หากใช้ PWM 7 บิตเพื่อสร้างแรงดันไฟฟ้าบนมอเตอร์ (ดูด้านล่าง) ให้ทำการคำนวณ เค มอเตอร์ค่าของแรงดันไฟฟ้าที่กำหนดคือ 128 หน่วยแรงดันไฟฟ้าทั่วไป
ความเร็วรอบเดินเบา w xxที่ระบุในข้อมูลหนังสือเดินทางของเครื่องยนต์ ควรอ่านซ้ำในหน่วยความเร็วทั่วไป วีxxกำหนดโดยวิธีการใช้งานเซ็นเซอร์ความเร็ว
ตัวอย่างเช่น สมมติว่ามีการใช้ตัวเข้ารหัสแบบเพิ่มหน่วยเพื่อวัดความเร็ว ซึ่งอยู่บนเพลามอเตอร์และมีเครื่องหมาย 512 ต่อรอบ ให้วัดความเร็วในหน่วยทั่วไปเป็นจำนวนเครื่องหมายต่อรอบการคำนวณ D t. ให้รอบการคำนวณที่ได้จากการประเมินประสิทธิภาพของอัลกอริธึมเท่ากับ 0.001 วินาที ปล่อยให้เครื่องยนต์รอบเดินเบา w xx=5000 รอบต่อนาที
ลองแปลความเร็วของเครื่องยนต์เป็นเครื่องหมายเซ็นเซอร์เราได้รับ: 5000x512 = 2560000 เครื่องหมาย / นาที ลองแปลงนาทีเป็นรอบการคำนวณ:
หากไม่ทราบพารามิเตอร์ของเครื่องยนต์ แสดงว่าความเร็วรอบเดินเบาจะถูกกำหนดโดยการทดลอง เมื่อต้องการทำเช่นนี้ ขณะเดินเบา แรงดันไฟฟ้าสูงสุดจะถูกนำไปใช้กับเครื่องยนต์และการอ่านค่าจะถูกนำมาจากเซ็นเซอร์ความเร็ว วี xx.
ค่าคงที่เวลาเครื่องกล T m ขึ้นอยู่กับโมเมนต์ความเฉื่อยของเพลามอเตอร์, กระปุกเกียร์, ความเฉื่อย อุปกรณ์บริหาร. โดยปกติแล้วจะไม่สามารถคำนวณมูลค่าด้วยการวิเคราะห์ได้ ดังนั้นจึงวัดจากการทดลอง
ในการทำเช่นนี้ แรงดันไฟฟ้าสูงสุดจะถูกนำไปใช้กับเครื่องยนต์อย่างกะทันหันที่โหลดพิกัดและกระบวนการชั่วคราวของการเปลี่ยนแปลงความเร็วจะถูกลบออก วี(ท).
ความเร็วจะถูกนำมาจากเซ็นเซอร์ความเร็วในช่วงเวลาที่ไม่ต่อเนื่อง ซึ่งบันทึกไว้ใน RAM ของไมโครโปรเซสเซอร์ จากนั้นจึงโอนไปยังคอมพิวเตอร์ส่วนบุคคล คอมพิวเตอร์ส่วนบุคคลสร้างกราฟการเปลี่ยนแปลงความเร็วขึ้นใหม่ วี(ท)(รูปที่ 3).
 |
ข้าว. 3. กระบวนการชั่วคราวในมอเตอร์กระแสตรง
ตามกราฟชั่วขณะ สามารถกำหนดได้ ประการแรก ความเร็วรอบเดินเบา วี xxและประการที่สอง เวลาควบคุม t p. เวลาควบคุมถูกกำหนดโดยเวลาสิ้นสุดของกระบวนการชั่วคราว (เวลาที่เส้นโค้งชั่วคราวแตกต่างน้อยกว่า 1% จากค่าสถานะคงตัว)
ถ้าเราละเลยอิทธิพลเล็กน้อยของค่าคงที่เวลาทางไฟฟ้า ทีอีโดยปกติแล้วจะเป็นลำดับความสำคัญที่น้อยกว่าค่าคงที่เวลาเชิงกล T mจากนั้นกระบวนการชั่วคราวในมอเตอร์กระแสตรงถือได้ว่าเป็น aperiodic ด้วยค่าคงที่ T m.
เป็นที่ทราบกันดีว่าเวลาของกระบวนการชั่วครู่ชั่วคราวนั้นยาวนานกว่าค่าคงที่เวลาห้าเท่า เหล่านั้น.:
ดังนั้นสำหรับกรณีของเราเราได้รับ:
ในกรณีของเรา เวลาควบคุม t pตัดสินโดยกราฟ เท่ากับ 1.5 วินาที จากนั้นค่าคงที่เวลาเชิงกล T m= 1.5/5 = 0.3 วินาที
ดังนั้น เมื่อพล็อตกราฟกระบวนการชั่วคราว เราจะพบค่าคงที่เวลาเชิงกล ที ม.
ค่าคงที่เวลาไฟฟ้าทีอี กำหนดความเฉื่อยของการสะกดจิตของกระดองมอเตอร์และเท่ากับอัตราส่วนของการเหนี่ยวนำของกระดองมอเตอร์ต่อความต้านทานของขดลวด:
ในทางปฏิบัติ พารามิเตอร์ความเหนี่ยวนำของกระดองนั้นยากต่อการวัด จากนั้นจึงนำค่าคงที่เวลาทางไฟฟ้ามาเทียบขนาดที่น้อยกว่าค่าคงที่เวลาเชิงกล:
สิ่งนี้เป็นจริงสำหรับเครื่องยนต์ส่วนใหญ่
การคำนวณค่าสัมประสิทธิ์ของตัวควบคุม PID
ในการคำนวณค่าสัมประสิทธิ์ของตัวควบคุม PID เราควรแก้ปัญหาผกผันของไดนามิก ในการดำเนินการนี้ เราขอสรุปจากตัวควบคุม PID เราจะถือว่าโครงสร้างตัวควบคุมคือ ฟังก์ชั่นการถ่ายโอนของมัน W p(s) ไม่เป็นที่รู้จักสำหรับเรา ด้วยเหตุนี้จึงทราบฟังก์ชันการถ่ายโอนของวัตถุควบคุม Wdv(ส)(รูปที่ 4).

ข้าว. 4. โครงร่างเริ่มต้นสำหรับการคำนวณคอนโทรลเลอร์สำหรับมอเตอร์กระแสตรง
เราเขียนฟังก์ชั่นการถ่ายโอนของระบบปิด ว ส (ส):
มาดูกันว่ากระบวนการชั่วคราวในระบบใดที่เหมาะกับเรา? เราค่อนข้างพอใจกับกระบวนการชั่วขณะในระบบ นี่คือวิธีที่ระบบควรตอบสนองต่อการเปลี่ยนแปลงของความเร็วและโหลด
ให้ค่าคงที่เวลาที่ต้องการของทรานเซียนท์ ตู่จะเท่ากันโดยประมาณ T m. เหล่านั้น. ฟังก์ชั่นการถ่ายโอนของระบบที่ต้องการ w(ส) เท่ากับ:
ให้เราเทียบฟังก์ชันการถ่ายโอนของระบบปิดกับฟังก์ชันการถ่ายโอนของระบบที่ต้องการ:
โดยการแปลงทางคณิตศาสตร์อย่างง่าย เราแสดงนิพจน์สำหรับฟังก์ชันการถ่ายโอนของคอนโทรลเลอร์ W p(ส):
แทนค่า W มอเตอร์(s):
มาแนะนำค่าสัมประสิทธิ์:
เราได้รับ:
ไม่ยากที่จะเห็นว่าเราเพิ่งได้ค่าสัมประสิทธิ์ ค 1 , สัมประสิทธิ์ก่อนการเชื่อมโยงอินทิกรัล จาก 2 และสัมประสิทธิ์หน้าลิงก์แยกความแตกต่าง ค 3 . เหล่านั้น. เรามีโครงสร้างตัวควบคุม PID แบบคลาสสิกพร้อมพารามิเตอร์ K p=จาก 1 , K และ=ค 2 และ K d=ค 3 :
การใช้งานคอนโทรลเลอร์ PID บนไมโครโปรเซสเซอร์ดิจิตอล
ปัจจุบันระบบที่มีตัวควบคุม PID นั้นใช้งานแบบดิจิทัลเท่านั้น และการคำนวณกฎหมายควบคุมนั้นดำเนินการโดยไมโครโปรเซสเซอร์ราคาถูกของ AVR หรือ MCS -51 ซีรีส์ โปรดทราบว่าไมโครโปรเซสเซอร์เป็นจำนวนเต็มและไม่รองรับการทำงานของจุดทศนิยม สิ่งนี้ต้องการให้โปรแกรมเมอร์ปรับอัลกอริทึมให้เหมาะสม
ในระบบ PID ความเร็วของมอเตอร์วัดโดยใช้เซ็นเซอร์ ความเร็วจริงวัดเป็นหน่วยความเร็วตามเงื่อนไขจำนวนเต็ม โดยปกติ หน่วยความเร็วทั่วไปจะถูกเลือกในลักษณะที่ความเร็วในหน่วย c.u. เปลี่ยนในช่วงจาก -127 เป็น 127 (หนึ่งไบต์) ในกรณีที่รุนแรงจาก -15 เป็น 15 (ความเร็วจะถูกใช้โดยมีระยะขอบ) แต่ไม่ว่าในกรณีใด จำนวนความเร็วที่เพิ่มขึ้นไม่ควรน้อยกว่าจำนวนความเร็วที่ต้องการ
สามารถวัดความเร็วได้โดยเซ็นเซอร์ต่อไปนี้:
ความเร็วที่กำหนดจะถูกป้อนเข้าสู่ระบบในหน่วยทั่วไปเดียวกันกับความเร็วจริง ความเร็วที่ตั้งไว้มักจะส่งจากโปรเซสเซอร์ควบคุมระดับสูงหรือคอมพิวเตอร์ส่วนบุคคล และเก็บไว้ในเซลล์หน่วยความจำที่เหมาะสมของไมโครโปรเซสเซอร์
ข้อเสนอแนะ adderลบออกจากความเร็วที่ตั้งไว้ วี assความเร็วที่แท้จริง วีและรับสัญญาณผิดพลาดที่เรียกว่า อี:
ถือว่าความเร็ว วี assและ วีเป็นจำนวนเต็มในช่วง -127 ถึง 127 การดำเนินการนี้ทำได้ค่อนข้างง่ายบนไมโครโปรเซสเซอร์จำนวนเต็ม ก็ควรที่จะมั่นใจได้ว่าผลที่ได้ ถ้า e<-127 , то e =127, а если e >12 7 แล้ว e = 127
สัญญาณผิดพลาด อีป้อนอินพุตของตัวควบคุม PID นั่นคือ บนลิงค์ตามสัดส่วน อินทิกรัล และดิฟเฟอเรนเชียล
ลิงค์ตามสัดส่วนสร้างสัญญาณเอาท์พุต y pโดยการคูณสัญญาณผิดพลาดทันทีด้วยตัวประกอบ K p.
ค่าสัมประสิทธิ์ K pมักจะแสดงค่าที่ไม่ใช่จำนวนเต็มระหว่าง 0.5 ถึง 2 ดังนั้น การคูณจำนวนเต็มหนึ่งไบต์จำนวนเต็ม อีสำหรับค่าสัมประสิทธิ์นี้ให้ใช้ตาราง เค พีผมซึ่งคำนวณล่วงหน้า:
สำหรับ ผม =-127...127นอกจากนี้ ตัวเลขในตารางยังคำนึงถึงข้อจำกัดของผลลัพธ์ซึ่งควรกลายเป็นหนึ่งไบต์ด้วยไม่เกินค่า 127 นั่นคือถ้าผลการคูณมากกว่า 127 ให้นำมาเท่ากับ 127 และหากน้อยกว่า -127 ก็เท่ากับ -127
โปรแกรมเมอร์ควรเข้าใจว่าโปรเซสเซอร์พิจารณาหมายเลขที่มีลายเซ็น ผมเป็นดัชนีตารางที่ไม่ได้ลงนาม ดังนั้นองค์ประกอบตารางที่มีดัชนีตั้งแต่ -128 ถึง -1 จะอยู่ในช่วงดัชนีตั้งแต่ 128 ถึง 255
แล้วคูณด้วยสัมประสิทธิ์ K pแทนที่ด้วยการเลือกองค์ประกอบของตาราง เค พีผมด้วยดัชนี อี :
ตารางนี้มักจะคำนวณบนคอมพิวเตอร์ส่วนบุคคลและแฟลชลงในหน่วยความจำไมโครโปรเซสเซอร์
ลิงค์อินทิกรัลสร้างสัญญาณเอาท์พุต y และโดยบูรณาการสัญญาณข้อผิดพลาด อีโดยเวลาและคูณด้วยสัมประสิทธิ์ K และ.
ที่นี่: ตู่- เวลาตั้งแต่เริ่มงาน
ไมโครโปรเซสเซอร์แบบดิจิตอลคำนวณอินทิกรัลโดยการรวมแบบทีละขั้นตอนด้วยขั้นตอนที่เท่ากับรอบนาฬิกาของตัวจับเวลา D t. ดังนั้น สำหรับกรณีที่ไม่ต่อเนื่อง สูตรจะถูกแทนที่ด้วย:
โดยที่ k คือจำนวนรอบการคำนวณที่ผ่านไปตั้งแต่เริ่มงาน
พิจารณาผลรวมของทั้งหมด อีk. โดยพื้นฐานแล้วมันเป็นเพียงผลรวมของค่าทั้งหมด อี ,รับในแต่ละรอบ ผลรวมนี้เรียกว่าผลรวมปริพันธ์ ส (เพื่อไม่ให้สับสนกับ ส - ตัวดำเนินการ Laplace) ผลรวมเชิงปริพันธ์ถูกนำมาใช้เป็นตัวแปรส่วนกลางและจะเพิ่มขึ้นในแต่ละรอบด้วยค่าปัจจุบันของสัญญาณผิดพลาด อี :
เมื่อคำนวณตัวควบคุม PID ค่าสัมประสิทธิ์ K และโดยปกติระหว่าง 0.05 ถึง 2 รอบการคำนวณ D tช่วงตั้งแต่ 0.0001 ถึง 0.002 วินาที ดังนั้นสัมประสิทธิ์ K และดี tคือ จาก 5·10 -6 ถึง 4·10 - 3 เพราะ ค่าสัมประสิทธิ์นี้น้อยกว่า 1 มาก ดังนั้นปัญหาของการคูณจำนวนเต็มจึงเกิดขึ้น เนื่องจาก หลังจากการคูณจะเป็นศูนย์เสมอ
ในการแก้ปัญหานี้ ให้ลองคูณค่าสัมประสิทธิ์ K และดี tสำหรับตัวเลขจำนวนมาก อา และหารผลรวมปริพันธ์ด้วยจำนวนเดียวกัน:

ระบุสินค้า K และดี t · อา ผ่านสัมประสิทธิ์ บี :
มาเลือกเบอร์กัน อา , ทวีคูณของ 256 xถึงค่าสัมประสิทธิ์ บี อยู่ในช่วงตั้งแต่ 0.05 ถึง 5
เพื่อคำนวณอัตราส่วน S/A , ขยายเครื่องหมายของตัวเลข ส :
ใช้การคำนวณแบบ 16 บิต ส, ถ้า อา =256;
ใช้การคำนวณแบบ 24 บิต ส, ถ้า อา =256 2 ;
ใช้การคำนวณแบบ 32 บิต ส, ถ้า อา =256 3 .
การใช้งานการเพิ่มหมายเลขที่ลงนามแบบ 16, 24 หรือ 32 บิตนั้นไม่ใช่เรื่องยาก ส ลงนามหมายเลข 8 บิต อี. อย่าลืมว่าถ้า อีหากเป็นค่าบวก ส่วนขยายการลงนามจะเติมบิตที่มีลำดับสูงด้วยเลขศูนย์ และหากเป็นค่าลบ บิตที่มีลำดับสูงจะถูกเติมด้วยบิตที่มีลำดับสูง เพื่อจำกัดการสะสมของอินทิกรัล เราใช้ขีดจำกัดบนและล่าง โดยปกติจะทำดังนี้: หากบิตที่สำคัญที่สุด (เครื่องหมาย) ไม่เท่ากับบิตสุดท้าย การเติบโตของผลรวมอินทิกรัลควรถูกระงับ
จำได้ว่าการหารจำนวนใด ๆ ด้วยจำนวน 256 xเท่ากับกะขวาโดย xไบต์ไปทางขวา ลองใช้กฎนี้ ใช้เฉพาะไบต์สูงของผลรวมอินทิกรัล ส : ในกรณีของการนับแบบ 16 บิต จะเท่ากับการเปลี่ยนแปลงหนึ่งไบต์ ในกรณีของการนับแบบ 24 บิต - คูณสองไบต์ ในกรณีของการนับแบบ 32 บิต - คูณสามไบต์
ทางนี้:
ที่ไหน: ส แก่กว่า- ไบต์สูงของตัวเลข ส .
การคูณด้วยตัวประกอบ บี ดำเนินการในรูปแบบของตาราง บี ผมคล้ายกับการคำนวณค่าสัมประสิทธิ์การเชื่อมโยงตามสัดส่วน:
ลิงค์ดิฟเฟอเรนเชียล
วงจรอนุพันธ์คำนวณสัญญาณเอาท์พุต y d - e 0 เราใช้ในรูปแบบของตาราง ค ผมเช่นเดียวกับในการคำนวณลิงค์ตามสัดส่วน:
ตัวสะสมคอนโทรลเลอร์ PID
ตัวบวกหลังจากตัวควบคุม PID เพิ่มค่าสัญญาณทันที y p, y และและ y dและสร้างสัญญาณเอาท์พุต y:
เมื่อทำการสรุป คุณควรตรวจสอบให้แน่ใจว่าผลลัพธ์อยู่ในช่วงตั้งแต่ -127 ถึง +127 โดยดำเนินการ เช่น ผลรวม 16 บิต หากผลลัพธ์มากกว่า 127 ควรมีค่าเท่ากับ 127 และหากน้อยกว่า -127 ให้เท่ากับ -127
สัญญาณ PWM ถูกสร้างขึ้นโดยอัตโนมัติโดยไมโครโปรเซสเซอร์ AVR ไมโครโปรเซสเซอร์หนึ่งตัวสามารถสร้างสัญญาณ PWM ของฮาร์ดแวร์ได้ถึง 3 ตัว นอกจากนี้ สัญญาณ PWM ยังสามารถสร้างขึ้นโดยโปรแกรมโดยตัวจับเวลา
สะดวกในการสร้าง PWM 7 บิต ในกรณีนี้ สามารถเชื่อมต่อสวิตช์ไฟควบคุมได้ตามแผนภาพที่แสดงในรูปที่ สี่.
ข้าว. 4. วิธีเชื่อมต่อสวิตช์ไฟกับเอาต์พุต PWM
สูง (เครื่องหมาย) บิตของผลลัพธ์ yถูกส่งออกผ่านพิน I / O ใด ๆ ไปยังอินพุตหนึ่งของสวิตช์เปิดปิด และ 7 บิตที่เหลือ (บิตสุดท้ายถูกตั้งค่าเป็นศูนย์) โดยไม่มีการแปลงใดๆ สามารถโหลดลงในรีจิสเตอร์การสร้างการตัด PWM ได้
มาพิสูจน์กัน
คิวอีดี
คุณสามารถปรับปรุงความถูกต้องของกฎระเบียบได้อย่างมากโดยใช้กฎหมาย PID (กฎหมายควบคุมตามสัดส่วน-ส่วนประกอบสำคัญ-ส่วนต่าง)
ในการบังคับใช้กฎหมาย PID จะใช้ตัวแปรหลักสามตัว:
P – แถบสัดส่วน, %;
ฉัน – เวลารวม s;
D คือเวลาการแตกตัว s
การปรับจูนคอนโทรลเลอร์ PID ด้วยตนเอง (การกำหนดค่าของพารามิเตอร์ P, I, D) ซึ่งให้คุณภาพการควบคุมที่จำเป็นนั้นค่อนข้างซับซ้อนและไม่ค่อยได้ใช้ในทางปฏิบัติ คอนโทรลเลอร์ PID ซีรีส์ UT/UP ให้การปรับแต่งพารามิเตอร์ PID โดยอัตโนมัติสำหรับกระบวนการควบคุมเฉพาะ ในขณะที่ยังคงความเป็นไปได้ของการปรับด้วยตนเอง
สัดส่วน
ในแถบสัดส่วนที่กำหนดโดยสัมประสิทธิ์ P สัญญาณควบคุมจะเปลี่ยนตามสัดส่วนกับความแตกต่างระหว่างค่าที่ตั้งไว้และค่าจริงของพารามิเตอร์ (ไม่ตรงกัน):
สัญญาณควบคุม = 100/P E,
โดยที่ E คือค่าที่ไม่ตรงกัน
สัมประสิทธิ์ของสัดส่วน (เกน) K เป็นสัดส่วนผกผันกับ P:
แถบสัดส่วนถูกกำหนดโดยสัมพันธ์กับ setpoint ของการควบคุมที่ตั้งไว้ และภายในแถบนี้ สัญญาณควบคุมจะเปลี่ยนจาก 0 เป็น 100% กล่าวคือ หากค่าจริงและ setpoint เท่ากัน สัญญาณเอาท์พุตจะมีค่า 50%
โดยที่ P คือแถบสัดส่วน
ST - จุดกำหนดระเบียบ
ตัวอย่างเช่น:
ช่วงการวัด 0…1000 °С;
ชุดควบคุมจุด ST = 500 °С;
แถบสัดส่วน P = 5% ซึ่งเท่ากับ 50 °C (5% ของ 1,000 °C);
ที่อุณหภูมิ 475 °C และต่ำกว่า สัญญาณควบคุมจะมีค่า 100% ที่ 525 °C และสูงกว่า - 0% ในช่วง 475…525 °C (ในแถบสัดส่วน) สัญญาณควบคุมจะเปลี่ยนตามสัดส่วนของค่าที่ไม่ตรงกันโดยมีเกน K = 100/P = 20
การลดค่าของแถบสัดส่วน P จะเพิ่มการตอบสนองของคอนโทรลเลอร์ต่อค่าที่ไม่ตรงกัน กล่าวคือ ค่าที่ไม่ตรงกันเล็กน้อยจะสอดคล้องกับค่าที่มากขึ้นของสัญญาณควบคุม แต่ในขณะเดียวกัน เนื่องจากเกนได้มาก กระบวนการจึงใช้ลักษณะการสั่นรอบๆ ค่าเซ็ตพอยต์ และไม่สามารถควบคุมที่แม่นยำได้ ด้วยการเพิ่มแถบสัดส่วนที่มากเกินไป ตัวควบคุมจะตอบสนองช้าเกินไปต่อผลลัพธ์ที่ไม่ตรงกัน และจะไม่สามารถติดตามการเปลี่ยนแปลงของกระบวนการได้ เพื่อชดเชยข้อเสียเหล่านี้ของการควบคุมตามสัดส่วน จึงมีการแนะนำคุณลักษณะเวลาเพิ่มเติม - องค์ประกอบที่สำคัญ
ส่วนประกอบสำคัญ
มันถูกกำหนดโดยค่าคงที่เวลารวม I เป็นฟังก์ชันของเวลาและให้การเปลี่ยนแปลงเกน (การเปลี่ยนแปลงของแถบสัดส่วน) ในช่วงเวลาที่กำหนด
สัญญาณควบคุม = 100/P E + 1/I ∫ E dt.
ดังที่เห็นได้จากรูป หากองค์ประกอบตามสัดส่วนของกฎหมายควบคุมไม่ได้ทำให้ความไม่ตรงกันลดลง ส่วนประกอบที่สำคัญจะเริ่มค่อยๆ เพิ่มอัตราขยายในช่วงเวลา I หลังจากช่วงเวลาหนึ่ง I กระบวนการนี้จะทำซ้ำ หากความไม่ตรงกันมีขนาดเล็ก (หรือลดลงอย่างรวดเร็ว) อัตราขยายจะไม่เพิ่มขึ้น และหากค่าของพารามิเตอร์เท่ากับการตั้งค่าที่ระบุ จะใช้ค่าต่ำสุดบางค่า ในเรื่องนี้ ส่วนประกอบสำคัญเรียกว่าฟังก์ชันปิดระบบควบคุมอัตโนมัติ ในกรณีของการควบคุม PID การตอบสนองของขั้นตอนของกระบวนการจะเป็นความผันผวนที่ค่อย ๆ ลดลงไปสู่ค่าที่ตั้งไว้
เงื่อนไขอนุพันธ์
ออบเจ็กต์ควบคุมจำนวนมากค่อนข้างเฉื่อย กล่าวคือ มีความล่าช้าในการตอบสนองต่อการดำเนินการที่ใช้ (เวลาตาย) และตอบสนองต่อไปหลังจากลบการดำเนินการควบคุม (เวลาหน่วง) ตัวควบคุม PID บนวัตถุดังกล่าวจะล่าช้าเสมอเมื่อเปิด/ปิดสัญญาณควบคุม เพื่อขจัดผลกระทบนี้ จึงมีการแนะนำองค์ประกอบดิฟเฟอเรนเชียล ซึ่งกำหนดโดยค่าคงที่เวลาของดิฟเฟอเรนติเอชัน D และมีการบังคับใช้กฎหมายควบคุม PID อย่างเต็มรูปแบบ องค์ประกอบดิฟเฟอเรนเชียลคืออนุพันธ์ด้านเวลาของค่าที่ไม่ตรงกัน กล่าวคือ เป็นฟังก์ชันของอัตราการเปลี่ยนแปลงของพารามิเตอร์ควบคุม ในกรณีที่ค่าที่ไม่ตรงกันกลายเป็นค่าคงที่ ส่วนประกอบส่วนต่างจะหยุดส่งผลต่อสัญญาณควบคุม
สัญญาณควบคุม = 100/P E + 1/I ∫ E dt + D d/dt E.
ด้วยการแนะนำส่วนประกอบที่แตกต่างกัน ตัวควบคุมจะเริ่มพิจารณาเวลาตายและเวลาหน่วง โดยเปลี่ยนสัญญาณควบคุมล่วงหน้า ซึ่งทำให้สามารถลดความผันผวนของกระบวนการรอบๆ ค่าที่ตั้งไว้ได้อย่างมาก และเพื่อให้การดำเนินการชั่วคราวเสร็จสิ้นเร็วขึ้น
ดังนั้น เมื่อสร้างสัญญาณควบคุม ตัวควบคุม PID จะคำนึงถึงลักษณะของวัตถุควบคุมด้วย เช่น วิเคราะห์ความไม่ตรงกันสำหรับขนาด ระยะเวลา และอัตราการเปลี่ยนแปลง กล่าวอีกนัยหนึ่ง ตัวควบคุม PID "คาดการณ์" ปฏิกิริยาของวัตถุควบคุมกับสัญญาณควบคุม และเริ่มเปลี่ยนการดำเนินการควบคุมไม่ใช่เมื่อถึงค่าที่ตั้งไว้ แต่ล่วงหน้า
5. ฟังก์ชั่นการถ่ายโอนที่แสดงลิงค์: K (p) \u003d K / Tr





