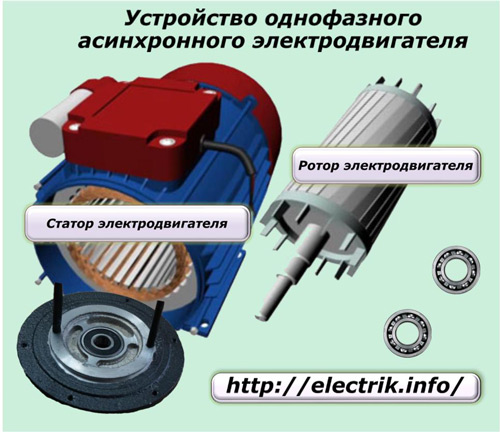
Působivá síla asynchronního elektromotoru, který přeměňuje elektřinu na rotační energii, nevzniká žádnými mechanickými součástmi: pro tak silnou rotaci se k jeho „vycpávání“ používají pouze elektromagnety.
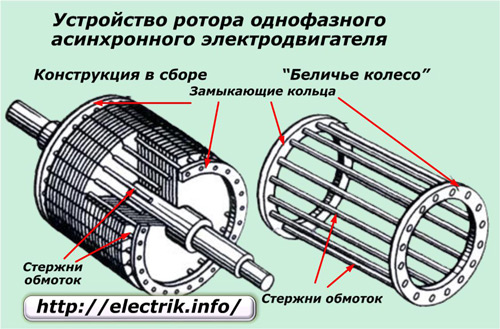
Rotor indukčního motoru: provedení
Rotor - prvek elektromotoru rotující uvnitř statoru (pevná součást), jehož hřídel je spojena s částmi pracovních jednotek, například pil, turbín a čerpadel. Laminované jádro je vyrobeno z jednotlivých plechů z elektrooceli s polouzavřenými nebo otevřenými štěrbinami.
Motor je elektromechanické zařízení, které přeměňuje elektrickou energii na mechanickou energii. a třífázový motor běžící synchronní rychlostí se nazývá synchronní motor. Když se dva protilehlé póly přiblíží k sobě, pokud jsou magnety silné, mezi oběma póly je obrovská přitažlivá síla. V tomto stavu se dva magnety nazývají magnetické.
Princip synchronního otáčení
Jak se rotor otáčí synchronní rychlostí? Nyní, abyste pochopili koncepci provozu synchronního motoru, zvažte dvoupólový jednoduchý rotor. Synchronní motor je stroj s dvojitým buzením se dvěma připojenými elektrickými vstupy. Proto se synchronní motor otáčí jednou a pouze jednou rychlostí, tj. synchronní rychlostí. Ale to vše závisí na přítomnosti magnetického blokování mezi póly statoru a rotoru. Je prakticky nemožné, aby póly statoru vytáhly póly rotoru z jejich stacionární polohy do magneticky zajištěného stavu. to je důvod, proč se synchronní motory samy nespustí.
Masivní rotor je pevný ocelový válec umístěný uvnitř statoru, na jehož povrchu je nalisováno jádro.
Bezkontaktní, nepřipojený k žádnému externímu elektrický obvod vinutí rotoru vytváří točivý moment a je dvou typů:
- zkratovaný (rotor nakrátko);
- fáze (fázový rotor).
klecový rotor
Roli elektromagnetů s póly obrácenými ke statoru plní vysoce vodivé měděné tyče (u strojů s vysokým výkonem) nebo hliníkové tyče (u strojů s nižším výkonem) připájené nebo zalité do povrchu jádra a na koncích zkratované dvěma kroužky. Tento design se nazývá „klec pro veverky“, kterou mu dal ruský elektroinženýr M. O. Dolivo-Dobrovolsky.
Metody spouštění synchronního motoru. Po chvíli, kdy dojde k magnetickému zablokování, se odpojí napájení externího motoru od spojky. Aplikace synchronních motorů. Používá se tam, kde je vyžadován vysoký výkon při konstantní rychlosti.
Vzhledem k tomu, že synchronní motor je schopen jak předběžný, tak i zpožděný účiník, lze jej použít ke zlepšení účiníku. Nezatížený synchronní motor s předním účiníkem je zapojen do energetického systému, kde nelze použít statické kondenzátory.
Tyče vinutí nemají žádnou izolaci, protože napětí v takovém vinutí je nulové. Běžněji používaný pro středně výkonné motorové tyče, snadno tavitelný hliník se vyznačuje nízkou hustotou a vysokou elektrickou vodivostí. Pro snížení vyšších harmonických elektromotorické síly (EMF) a odstranění zvlnění magnetické pole rotorové tyče mají určitý vypočítaný úhel sklonu vzhledem k ose otáčení.
Konstrukce indukčního motoru s rotačním rotorem
Synchronní motor najde uplatnění tam, kde jsou nižší provozní otáčky a je vyžadován vysoký výkon. V mém minulém článku jsme rozebírali jaký typ. Tento motor využívá vinutý rotor. Asynchronní motor s rotačním rotorem je také známý jako asynchronní motor uklouznutí. Stejně jako u ostatních indukčních motorů jsou hlavními částmi stator a rotor. Stator tohoto motoru je stejný jako u indukčních motorů s klecový rotor. Rotor je část, která jej odlišuje od ostatních indukčních motorů.
U motorů s nízkým výkonem jsou drážky jádra obvykle uzavřeny: oddělení rotoru od vzduchové mezery - ocelová deska umožňuje dodatečně upevnit vinutí, ale na úkor určitého zvýšení jejich indukčního odporu.
fázový rotor
Prakticky se neliší od třífázového vinutí statoru (ve více obecný případ- vícefázové) vinutí položené v drážkách jádra, jehož konce jsou spojeny podle schématu "hvězdy". Vývody vinutí jsou spojeny s kontaktními kroužky upevněnými na hřídeli rotoru, na které se při nastartování motoru přitlačují a nasouvají stacionární grafitové nebo kov-grafitové kartáče spojené s reostatem.
Stator indukčního motoru vinutého rotátoru
Dovolte mi, abych vám krátce představil stator a poté vám řekl o struktuře rotoru.
Rotor indukčního motoru vinutého rotátoru
U indukčního motoru s rotačním rotorem má rotor třífázové vinutí podobně jako vinutí statoru. Vinutí je umístěno rovnoměrně na drážkách rotoru. spojeny 3 sběracími kroužky. Vše je o konstrukci rotoru. Nyní pojďme diskutovat o tom, jak to funguje.Provoz indukčního motoru s vinutým rotorem
Magnetické pole statoru a magnetické pole rotoru se vzájemně ovlivňují a mají za následek točivý moment, který otáčí rotorem.- Rotor je rovněž válcový a má navíjecí otvory.
- Tyto sběrací kroužky jsou namontovány na hřídeli.
- Každá fáze je připojena k jednomu ze tří sběracích kroužků.
- Tyto sběrací kroužky jsou spojeny s kartáči.
- Tři sběrací kroužky rotují s rotorem, zatímco ruce zůstávají v klidu.
- Toto magnetické pole se nazývá magnetické pole rotoru.
K omezení vznikajících vířivých proudů obvykle postačí místo izolačních laků oxidový film nanesený na povrch vinutí.
Třífázový spouštěcí nebo nastavovací rezistor přidaný do obvodu vinutí rotoru umožňuje měnit aktivní odpor obvodu rotoru, čímž pomáhá snížit vysoké startovací proudy. Reostaty lze použít:
Rychlost a točivý moment lze u těchto motorů ovládat změnou odporu. Některé z charakteristik indukčních motorů s rotačním rotorem jsou uvedeny níže. Indukční motor s vinutým rotorem vyžaduje zvláštní údržbu kvůli prokluzu a kartáčům. Tento motor spotřebovává při startu méně proudu ve srovnání s indukčními motory s kotvou nakrátko. Asynchronní motor s rotačním rotorem je méně účinný než indukční motory s kotvou nakrátko.
- Rychlost těchto motorů můžete ovládat.
- Okamžik lze také ovládat.
- Tyto motory mají vysoký rozběhový moment.
- Takové motory jsou dražší než jiné indukční motory.
- Zohledněny jsou i náklady na údržbu.
- Tyto motory mají nízký účiník.
- kovový drát nebo stupňovitý - s ručním nebo automatickým přepínáním z jedné úrovně odporu na druhou;
- kapalina, jejíž odpor je regulován hloubkou ponoření do elektrolytu elektrod.
Pro zvýšení životnosti kartáčů jsou některé modely fázových rotorů vybaveny speciálním mechanismem s veverkou, který po nastartování motoru zvedne kartáče a uzavře kroužky.
A tam, kde indukční motory s kotvou nakrátko nelze použít kvůli jejich vysokým rozběhovým proudům. Indukční motor s vinutým rotorem se používá v aplikacích vyžadujících měkký start a proměnnou rychlost. Některé z aplikací pro tento motor zahrnují jeřáby, mlýny, kladkostroje a dopravníky. Indukční motor s rotačním rotorem se také používá ve ventilátorech, dmychadlech a mixérech. Používají se ve velkých čerpadlech ve vodárenství.
- Používají se v místech, kde je vyžadován vysoký rozběhový moment.
- Tyto motory se používají s vysokým setrvačným zatížením.
Asynchronní motory s fázovým rotorem se vyznačují složitější konstrukcí než s klecí nakrátko, ale zároveň optimálnějšími rozběhovými a regulačními charakteristikami.
Princip činnosti
Elektromagnety statoru jsou umístěny v blízkosti tyčí rotoru a přenášejí na ně elektřinu, aby jej otáčely. Magnetické pole indukované v rotoru bude následovat magnetické pole statoru, čímž dojde k mechanickému otáčení hřídele rotoru a přidružených jednotek. Elektromagnetická indukce vytvářená cívkami statoru zároveň tlačí proud na tyčích striktně od sebe. Hodnota proudu v tyčích se mění s časem.
Používají se v různých průmyslových aplikacích, ale mohou být chráněny před různými nebezpečími, jako jsou mechanické elektrické poruchy, aby pomohly jejich účelům. Tento článek pojednává o systému ochrany asynchronních motorů před výskytem poruch. Tento motor zažívá Různé typy elektrické poruchy, jako je přepětí, podpětí, přetížení, nesymetrické napětí, fázové zemní spojení a jednofázové poruchy. Tyto elektrické poruchy způsobují zahřívání vinutí motoru, což má za následek snížení životnosti motoru.
Pište komentáře, doplnění článku, možná mi něco uniklo. Podívejte se, budu rád, když se vám na mých stránkách ještě něco hodí. Vše nejlepší.
Napovídá to už samotný název tohoto elektrického zařízení Elektrická energie, který k němu dorazí, se převede na rotační pohyb rotor. Přídavné jméno "asynchronní" navíc charakterizuje nesoulad, zpoždění rychlosti otáčení kotvy od magnetického pole statoru.
Stupeň indukčního motoru závisí na nákladech a vlastnostech motoru. Směrový systém je navržen tak, aby chránil asynchronní motor před přehřátím a jednofázový. Ochranný systém využívající více motorů pro výrobu je v průmyslových odvětvích velmi důležitý.
Hlavním konstrukčním plánem tohoto projektu je zajistit bezpečnost v průmyslových odvětvích. Pokud teplota motoru během procesu překročí prahovou hodnotu, motor se bez zpoždění zastaví. Systém využívá 3-fázové napájení, ke kterému jsou připojeny 3-fázové transformátory. Pokud některá z fází není k dispozici, pak ekvivalentní transformátor končí a dodává energii do obvodu.
Slovo „jednofázový“ způsobuje nejednoznačnou definici. To je způsobeno skutečností, že v elektrice určuje několik jevů:
posun, úhlový rozdíl mezi vektorovými veličinami;
potenciální vodič dvou, tří nebo čtyřvodičových elektrický obvod střídavý proud;
jedno z vinutí statoru nebo rotoru třífázový motor nebo generátor.
Hlavní relé je napájeno přes sadu 4-relé, která jsou odpojena z důvodu, že jedno relé není ovládáno napájecím zdrojem. Hlavní relé tedy poskytuje třífázové napájení motoru, který je vypnutý. Termistor je připojen k tělu indukčního motoru pro snímání teploty. Pokud teplota vzroste, 4. relé je bez napětí.
Dále lze tento návrh vyvinout pomocí proudových snímačů pro ochranu proti přetížení a snímače sledu fází pro ochranu motoru před nesprávným sledem fází. To vše se tedy týká ochranného systému asynchronních motorů. Doufáme, že tento koncept lépe pochopíte.
Proto to hned upřesňujeme jednofázový elektromotor je zvykem volat ten, který pracuje od dvouvodičové sítě střídavý proud, reprezentovaný fází a nulovým potenciálem. Počet vinutí namontovaných v různých konstrukcích statoru toto určení neovlivňuje.
Konstrukce motoru
Podle technického zařízení se asynchronní motor skládá z:
Použití fázově posunutého vinutí ve statoru
Jeho hlavní charakteristiky jsou: Spolehlivost Nízké náklady na pořízení a údržbu Možnost regulace otáček. Čerpadla a kompresory Ventilátory Frézky Běžecké pásy, dopravníky a elevátory Brusky a brusky Pily, soustruhy a brusky.
Činnost všech elektromotorů, včetně třífázového asynchronního motoru, je založena na magnetickém poli vytvářeném elektrickým proudem cirkulujícím ve vinutí stroje. Pokud jde o třífázový indukční motor, má tři vinutí ve struktuře zvané stator.
1. stator - statická, pevná část, tvořená tělesem s různými elektrickými prvky umístěnými na něm;
2. rotor rotovaný silami elektromagnetického pole statoru.
Mechanické spojení těchto dvou částí je provedeno rotačními ložisky, jejichž vnitřní kroužky jsou uloženy na osazených pouzdrech hřídele rotoru a vnější kroužky jsou uloženy v ochranných bočních krytech upevněných na statoru.
Výsledné magnetické pole generované každým elektrickým proudem je rotační povahy a má konstantní rychlost. Jak můžeme najít výsledné pole? Když je cívka poháněna elektrickým proudem, vytváří se magnetické pole podél osy cívky a má hodnotu úměrnou proudu.
Třífázové vinutí se skládá ze tří jednofázových 120 ohmových distančních vložek. Tato pole jsou umístěna ve vzdálenosti 120 stupňů od sebe. Toto magnetické pole přitahuje pohybující se strukturu zvanou rotor a způsobuje její rotaci. Synchronní rychlost točivého pole je dána následovně.
Rotor
Jeho zařízení pro tyto modely je stejné jako u všech asynchronních motorů: magnetický obvod je namontován na ocelové hřídeli z vrstvených desek na bázi slitin měkkého železa. Na jeho vnějším povrchu jsou vytvořeny drážky, do kterých jsou namontovány navíjecí tyče z hliníku nebo mědi, na koncích zkratované k uzavíracím kroužkům.
Nejběžnější hodnoty pólů jsou 2, 4, 6 nebo 8 pólů. Pohyblivá část, nazývaná rotor, zodpovědná za přenos mechanický pohyb k nákladu, jako je výtah. Je zřejmé, že všechna zařízení, která mě zajímají, jsou vybavena asynchronním motorem.
Princip a činnost indukčního motoru
Jaké jsou výhody tohoto typu motoru? Zde je několik odpovědí. Indukční motor je vysoce výkonný motor často používaný v oblasti dopravy, průmyslu a domácí přístroje. Asynchronní motor, který se skládá ze dvou samostatných částí nazývaných rotor a stator, vděčí za svůj název rozdílu ve výkonu naměřeném na každé z těchto částí. I když se stator otáčí určitou rychlostí určenou elektrickým proudem, rotor mezitím generuje své vlastní magnetické pole a má svou vlastní rychlost otáčení, která není úměrná rychlosti statoru.
proudí ve vinutí rotoru elektřina, indukované magnetickým polem statoru a magnetický obvod slouží k dobrá přihrávka zde vzniklý magnetický tok.
Samostatné konstrukce rotoru pro jednofázové motory mohou být vyrobeny z nemagnetických nebo feromagnetických materiálů ve formě válce.
Asynchronní motor a kuchyňský robot
Tento rozdíl, nazývaný fázový posun, je typicky mezi 2 a 10 %. Indukční motor je široce používán ve světě domácích spotřebičů, hlavně pro pračky, myčky a sušičky. Tento typ motoru je velmi robustní a poskytuje relativně tichý chod. V případě domácích robotů má indukční motor důležitou výhodu: protože se obě části motoru otáčejí různou rychlostí, mohou lopatky robota přizpůsobit svou rychlost obsahu v samotné míse, když zařízení běží na plný výkon.
stator
Představena je také konstrukce statoru:
tělo;
magnetický obvod;
navíjení.
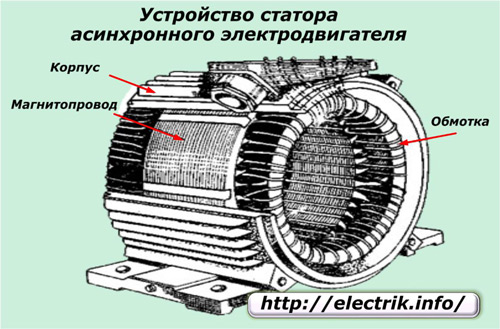
Jeho hlavním účelem je generovat stacionární nebo rotující elektromagnetické pole.
Statorové vinutí se obvykle skládá ze dvou obvodů:
Jinými slovy, čím je vaření hustší, tím pomaleji se robot otáčí, i když je nastaven maximální výkon. Asynchronní motor také nabízí možnost přizpůsobit rychlost zařízení množství produktů přítomných v nádobě. Stručně řečeno: roboti, kteří mají asynchronní motor, jsou inteligentní roboti. Další podstatná výhoda: asynchronní motor domácích robotů činí tato zařízení tiššími. Kritérium výběru pro nedělní ranní vaření bez probuzení celého domu!
1. dělník;
2. odpalovací zařízení.
U nejjednodušších provedení, určených pro ruční odvíjení kotvy, lze vyrobit pouze jedno vinutí.
Princip činnosti asynchronního jednofázového elektromotoru
Pro zjednodušení prezentace materiálu si představme, že statorové vinutí je vyrobeno pouze jedním otočením smyčky. Jeho dráty uvnitř statoru jsou neseny v kruhu o 180 úhlových stupňů. Prochází jím střídavý sinusový proud, který má kladné a záporné půlvlny. Vytváří ne rotující, ale pulzující magnetické pole.
Jak dochází k pulzacím magnetického pole
Analyzujme tento proces na příkladu toku kladné půlvlny proudu v časech t1, t2, t3.
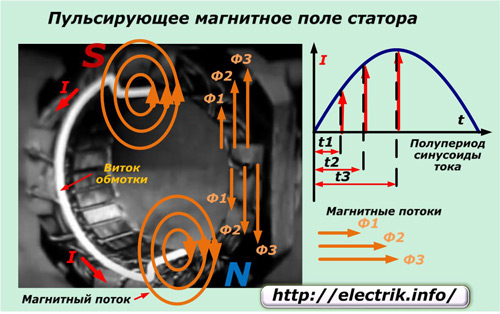
Vede po horní části vodiče směrem k nám a po spodní části od nás. V kolmé rovině představované magnetickým obvodem vznikají kolem vodiče magnetické toky F.
Proudy měnící se v amplitudě v uvažovaných okamžicích vytvářejí elektromagnetická pole různé velikosti F1, F2, F3. Protože proud v horní a dolní polovině je stejný, ale cívka je ohnutá, magnetické toky každé části směřují opačně a navzájem se ruší. Můžete to určit pravidlem gimletu nebo pravé ruky.
Jak je vidět, při kladné půlvlně rotace není magnetické pole pozorováno, ale dochází pouze k jeho pulzaci v horní a spodní části drátu, která je navíc v magnetickém obvodu vzájemně vyvážena. Ke stejnému procesu dochází v negativní části sinusoidy, kdy proudy mění směr na opačný.
Protože neexistuje žádné rotující magnetické pole, rotor zůstane nehybný, protože na něj nepůsobí žádné síly, aby se začal otáčet.
Jak vzniká rotace rotoru v pulzujícím poli
Pokud nyní dáme rotoru rotaci, i když ručně, bude pokračovat v tomto pohybu.
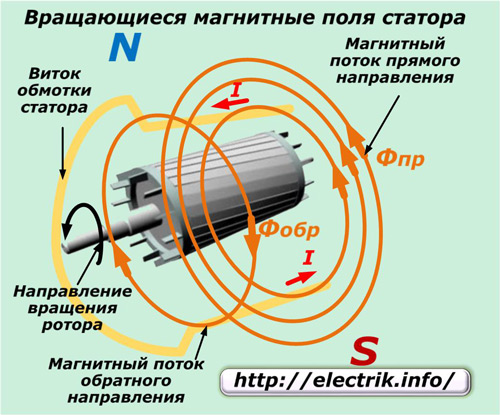
Abychom tento jev vysvětlili, ukážeme, že celkový magnetický tok se mění ve frekvenci proudové sinusoidy z nuly na maximální hodnotu v každém půlcyklu (se změnou směru k opačnému) a skládá se ze dvou částí vytvořených v horní a dolní větvi, jak je znázorněno na obrázku.
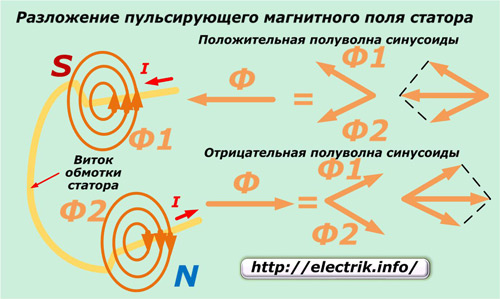
Magnetické pulzující pole statoru se skládá ze dvou kruhových s amplitudou Фmax/2 a pohybujících se v opačných směrech se stejnou frekvencí.
npr=nrev=f60/p=1.
Tento vzorec označuje:
npr a nrev frekvence otáčení magnetického pole statoru v dopředném a zpětném směru;
n1 je rychlost rotujícího magnetického toku (ot/min);
p je počet párů pólů;
f je frekvence proudu ve vinutí statoru.
Nyní dáme motoru otáčení rukou v jednom směru a ten okamžitě zachytí pohyb v důsledku vzniku točivého momentu způsobeného klouzáním rotoru vzhledem k různým magnetickým tokům dopředného a zpětného směru.
Předpokládejme, že magnetický tok dopředného směru se shoduje s rotací rotoru a zpětný tok bude opačný. Označíme-li n2 frekvenci otáčení kotvy v otáčkách za minutu, pak můžeme napsat výraz n2< n1.
V tomto případě označujeme Spr \u003d (n1-n2) / n1 \u003d S.
Zde jsou indexy S a Spr skluzy indukčního motoru a rotoru relativního magnetického toku v dopředném směru.
Pro zpětný tok je klouzavý Srev vyjádřen podobným vzorcem, ale se změnou znaménka n2.
Srev \u003d (n1 - (-n2)) / n1 \u003d 2-Spr.
V souladu se zákonem elektromagnetické indukce působením přímých a zpětných magnetických toků ve vinutí rotoru, elektromotorická síla, který v něm vytvoří proudy stejných směrů I2pr a I2arr.

Jejich frekvence (v hertzech) bude přímo úměrná velikosti skluzu.
f2pr=f1∙Spr;
f2rev=f1∙Srev.
Navíc frekvence f2rev, tvořená indukovaným proudem I2rev, výrazně převyšuje frekvenci f2rev.
Například elektromotor běží v síti 50 Hz s n1=1500 a n2=1440 ot./min. Jeho rotor má skluz vzhledem k dopřednému magnetickému toku Spr=0,04 a proudovou frekvenci f2pr=2 Hz. Zpětný skluz Srev=1,96 a aktuální frekvence f2rev=98 Hz.
Na základě Ampérova zákona, když proud I2pr interaguje s magnetickým polem Фpr, objeví se točivý moment Mpr.
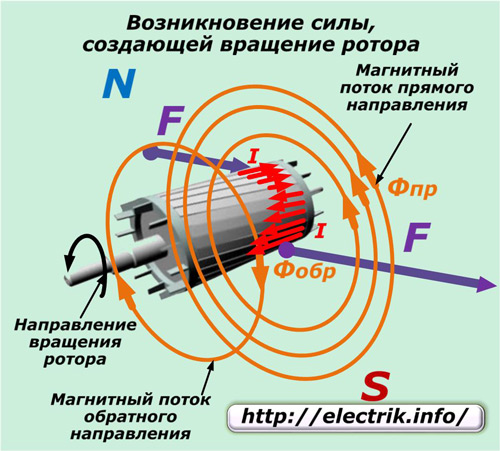
Mpr \u003d cm ∙ Fpr ∙ I2pr ∙cosφ2pr.
Zde je hodnota konstantního koeficientu cM závislá na konstrukci motoru.
V tomto případě působí také zpětný magnetický tok Mobr, který se vypočítá výrazem:
Mobr \u003d cm ∙ Fabr ∙ I2 arr ∙ cosφ2 arr.
V důsledku interakce těchto dvou toků se objeví výsledný:
M= Mpr-Mobr.
Pozornost! Při otáčení rotoru se v něm indukují proudy různých frekvencí, které vytvářejí momenty sil s různými směry. Proto se kotva motoru bude otáčet působením pulzujícího magnetického pole ve směru, ze kterého se začala otáčet.
Při překonávání jmenovité zátěže jednofázovým motorem vzniká malý skluz s hlavním podílem přímého momentu Mpr. Protipůsobení brzdného, zpětného magnetického pole Mobr ovlivňuje velmi málo kvůli rozdílu ve frekvencích proudů dopředného a zpětného směru.
f2reverse proud výrazně převyšuje f2reverse, a generovaný indukční reaktance X2obr výrazně převyšuje aktivní složku a poskytuje velký demagnetizační účinek zpětného magnetického toku Fobre, který se nakonec snižuje.
Protože účiník motoru pod zatížením je malý, zpětný magnetický tok nemůže mít silný vliv na rotující rotor.
Když je jedna fáze sítě napájena motorem s pevným rotorem (n2=0), pak jsou skluzy vpřed i vzad rovny jedné a magnetická pole a síly dopředného a zpětného toku jsou vyvážené a nedochází k rotaci. Proto je nemožné odvinout kotvu elektromotoru z napájení jedné fáze.
Jak rychle určit otáčky motoru:
Jak vzniká rotace rotoru u jednofázového asynchronního motoru
Během celé historie provozu těchto zařízení byla vyvinuta následující konstrukční řešení:
1. ruční předení hřídele ručně nebo šňůrou;
2. použití přídavného vinutí připojeného v době startu z důvodu ohmického, kapacitního nebo indukčního odporu;
3. rozdělení magnetickou cívkou nakrátko magnetického obvodu statoru.
První metoda byla použita v počátečním vývoji a nebyla dále používána kvůli možným rizikům zranění při startu, i když nevyžaduje připojení dalších řetězů.
Použití fázově posunutého vinutí ve statoru
Aby došlo k počáteční rotaci rotoru vinutí statoru, je navíc v době startu připojen další pomocný, ale pouze posunutý o 90 stupňů. Provádí se silnějším drátem, aby procházel většími proudy, než které tečou v pracovním.
Schéma zapojení takového motoru je znázorněno na obrázku vpravo.

Zde se pro zapnutí používá tlačítko typu PNVS, které je speciálně navrženo pro takové motory a bylo široce používáno v provozu praček vyráběných v SSSR. Toto tlačítko okamžitě sepne 3 kontakty tak, že po stisknutí a uvolnění dva krajní zůstanou fixovány v zapnutém stavu a prostřední se na krátkou dobu sepne a pak se působením pružiny vrátí do původní polohy.
Sepnuté krajní kontakty lze vypnout stisknutím sousedního tlačítka "Stop".

K deaktivaci přídavného vinutí v automatickém režimu se kromě tlačítkového spínače používají následující:
1. odstředivé spínače;
2. diferenciální nebo proudová relé;
Chcete-li zlepšit startování motoru při zatížení, doplňkové prvky ve vinutí s fázovým posunem.
V takovém obvodu je ohmický odpor namontován v sérii k přídavnému vinutí statoru. V tomto případě se navíjení závitů provádí bifilárním způsobem, což zajišťuje, že koeficient samoindukce cívky je velmi blízký nule.
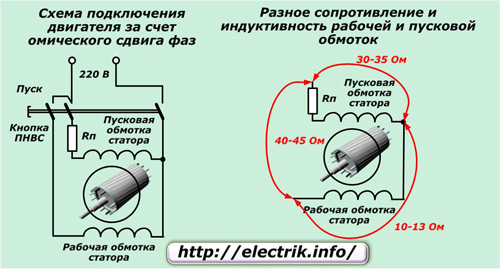
Díky implementaci těchto dvou technik, když proudy procházejí různými vinutími, dochází mezi nimi k fázovému posunu v řádu 30 stupňů, což je docela dost. Úhlový rozdíl vzniká změnou komplexních odporů v každém obvodu.
U této metody může být také spouštění vinutí s nízkou indukčností a vysokým odporem. K tomu se používá vinutí s malým počtem závitů drátu podhodnoceného průřezu.
Kapacitní fázový posun proudů umožňuje vytvořit krátkodobé spojení vinutí se sériově zapojeným kondenzátorem. Tento obvod funguje pouze při zapnutém motoru a poté se vypne.
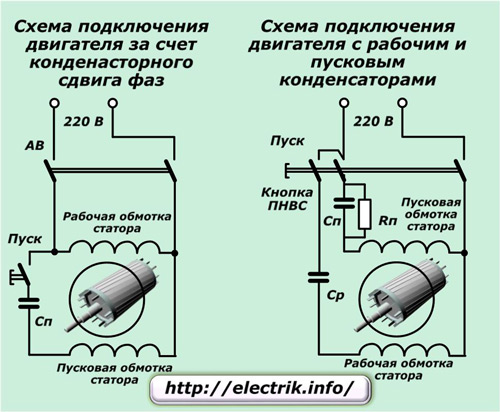
Kapacitní spouštění vytváří větší točivý moment a vyšší účiník než odporové nebo indukční spouštění. Může dosáhnout 45÷50 % nominální hodnoty.
V samostatných obvodech se kapacita také přidává do řetězce pracovního vinutí, které je neustále zapnuté. Díky tomu jsou proudy ve vinutí vychylovány o úhel řádově π/2. Zároveň je u statoru velmi patrný posun amplitudových maxim, který zajišťuje dobrý kroutící moment na hřídeli.
Díky této technice je motor schopen generovat větší výkon při startování. Tato metoda se však používá pouze u těžkých startovacích pohonů, například k roztočení bubnu. pračka naplněné prádlem vodou.
Spuštění kondenzátoru umožňuje změnit směr otáčení kotvy. K tomu stačí změnit polaritu připojení startovacího nebo pracovního vinutí.
Připojení jednofázového stíněného pólového motoru
U asynchronních motorů o malém výkonu cca 100 W se využívá štěpení magnetického toku statoru díky zařazení měděné cívky nakrátko do pólu magnetického obvodu.
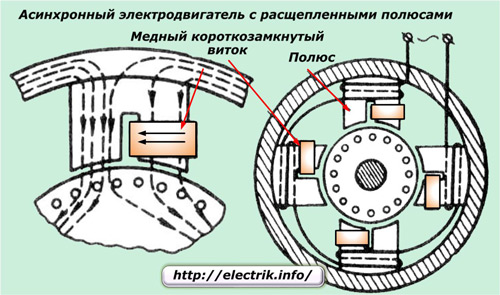
Takový pól rozříznutý na dvě části vytváří dodatečné magnetické pole, které je posunuto od hlavního podél úhlu a zeslabuje ho v místě pokrytém cívkou. To vytváří eliptické točivé pole, které generuje točivý moment konstantního směru.
V takových provedeních lze nalézt magnetické bočníky z ocelových plátů, které uzavírají okraje špiček pólů statoru.
Motory podobné konstrukce lze nalézt ve ventilátorových zařízeních pro foukání vzduchu. Nemají schopnost zpětného chodu.





