Podle konstrukce se asynchronní motory dělí na na dva hlavní typy: klecový rotor a fázový rotor (ten se také nazývá motoryse sběracími kroužky). Uvažované motory jsoumají stejnou konstrukci statoru a liší se pouze navíjení rotoru.
Klecové motory. Na statoru (obr. 5.3) je třífázové vinutí, které při připojení k síti třífázový proud vytváří rotující magnetické pole. Vinutí rotoru je vyrobeno ve formě veverkybuňky, je zkratovaný a žádné závěry nejsou Má to.
"Veverčí klec" se skládá z mědi nebo hliníkutyče na koncích zkratovány dvěma kroužky(obr. 5.4, A). Tyče tohoto vinutí jsou vloženy do drážekjádro rotoru bez izolace. v motorech"klec pro veverky" obvykle s nízkým a středním výkonem vyrobeno litím roztaveného hliníku slitiny do drážek jádra rotoru (obr. 5.4, b). Dohromady styče "klece pro veverky" vržené nakrátkokroužky a koncové lopatky pro ventilaciauta. Pro tento účel je obzvláště vhodný hliník.mající nízkou hustotu, tavitelnost apřesně vysoká elektrická vodivost. velký v autechvýkonové štěrbiny rotoru nakrátkopolouzavřené, u strojů s malým výkonem - uzavřené.Oba tvary drážek umožňují dobré vyztužení vodičůvinutí rotoru, i když mírně zvyšují průtokyrozptyl a indukční reaktance vinutí rotoru.
U motorů s vysokým výkonem se provádí „klec veverky“. z měděných tyčí, jejichž konce jsou svařenydo zkratovacích kroužků (obr. 5.4, c). Různé formyštěrbiny rotoru jsou znázorněny na Obr. 5.4, G.
Elektricky je "klec na veverky". je vícefázové vinutí připojené podle schématuΥ a zkratované. Počet fází vinutí t 2 rovná sepočet štěrbin rotoruz 2 a v každém
Rýže. 5.3.Zařízení indukčního motoru s veverkou klecí
rotor:
1 - rám; 2 - jádro statoru; 3 - jádro rotoru; 4 - vinutí
rotor "klec na veverku"; 5 - vinutí statoru; 6 - ventilační lamely
rotor; 7 - ložiskový štít; 8 - plášť ventilátoru; 9 - fanoušek
fáze zahrnuje jedna tyč a přilehlé oblasti krátké stahovací kroužky.
Často indukční motory s fází a krátké uzavřený rotor má na statoru zkosené drážky nebo rotor. Zkosené drážky jsou vyrobeny za účelem sníženívyšší harmonické EMF způsobené pulzacemi magnetůprůtok díky přítomnosti zubů, snížit hluk způsobenýmagnetické příčiny, eliminujte jev lepenírotor ke statoru, což je někdy pozorováno u mikro motory.
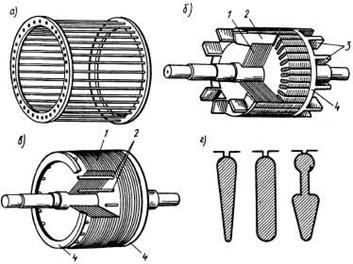
Rýže. 5.4.Design klece pro veverky:
1 - jádro rotoru; 2 - tyče; 3 - lopatky ventilátoru; 4 - zkraty -
důlkové kroužky
Motory s vinutým rotorem(obr. 5.5, A). Statorové vinutí je vyrobeno stejným způsobem jako u motorů s kotvou nakrátko. rotor. Rotor má třífázové vinutí se stejnýmpočet pólů. Vinutí rotoru je obvykle připojeno schéma Y , jehož tři konce vedou ke třem kontaktůmkroužky (obr. 5.5, b) rotující s hřídelí stroje.Pomocí kov-grafitových kartáčů klouzající po kon cyklovací kroužky, startovací nebo balastní reostat je součástí rotoru, tj. zavádějí do každé fáze rotoru další aktivní odpor.
Pro snížení opotřebení kroužků a kartáčů, fázové motoryněkdy mají zařízení pro zvedáníkartáčků a zkratování kroužků po vypnutíreostat. Zavedení těchto zařízení však komplikuje konstrukce elektromotoru a poněkud snižuje spolehlivost pro svou práci se proto obvykle používají struktury, ve kterém jsou kartáče neustále v kontaktu s kontaktem kroužky. Hlavní konstrukční prvky motorus fázovým rotorem jsou znázorněny na Obr. 5.6.
Oblasti použití pro motory různých typů. Podle konstrukce motorů s kotvou nakrátkovíce motorů s fázovým rotorem a spolehlivějšív provozu (nemají kroužky a kartáče,vyžadující systematické sledování, periodické
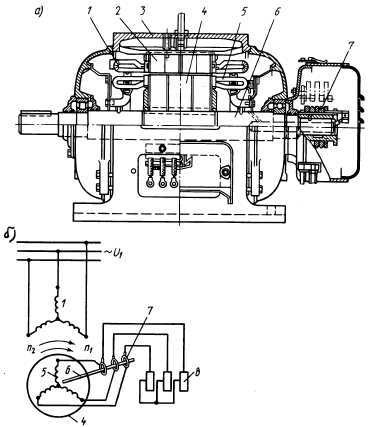
Rýže. 5.5.Zařízení asynchronního motoru s fázovým rotorem (A)
a schéma jeho zařazení (b):
1 - vinutí statoru; 2 - jádro statoru; 3 - rám; 4 - jádrorotor; 5 - vinutí rotoru; 6 -hřídel; 7 kroužků; 8 - startovací reostat
náhrady atd.). Hlavní nevýhody těchto motorů jsou relativně malý rozběhový moment a výrazný startovací proud. Proto se používají v těch elektrických pohony, kde nejsou vyžadovány vysoké rozběhové momenty(elektrické pohony kovoobráběcích strojů, ventilátorů atd.). Malé výkonové asynchronní motory a mikromotory fungují také s klecí nakrátko rotor.
Jak je znázorněno níže, v motorech se sběracími kroužkyje možné pomocí startovacího reostatu zvýšit startovací moment na maximální hodnotu asnížit startovací proud. Proto tyto motorylze použít k pohonu strojů a mechanismů,

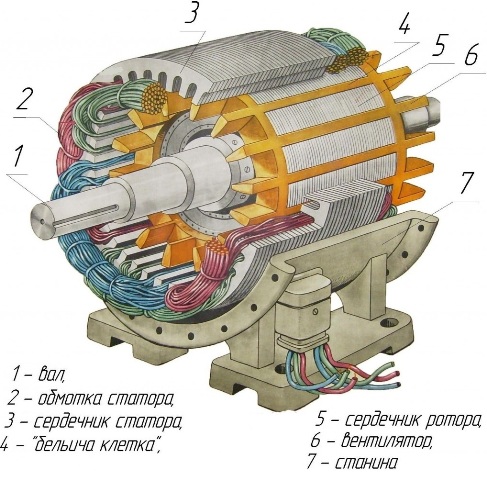
Rýže. 5.6.Stator a rotor indukčního motoru s fázovým rotorem:
1 - vinutí statoru; 2 -rám; 3 - jádro statoru; 4 - boxse závěry; 5 - jádro rotoru; 6 - vinutí rotoru; 7 - sběrací kroužky
které jsou spuštěny na těžký náklad(elektro pohony zdvihacích strojů apod.).
Elektromotory střídavý proud, využívající ke své práci rotující magnetické pole statoru, jsou v současnosti velmi rozšířené elektrické stroje. Nazývají se ty z nich, jejichž otáčky rotoru se liší od frekvence otáčení magnetického pole statoru asynchronní motory.
Vzhledem k velké kapacitě energetických systémů a velké délce elektrické sítě spotřebitelé jsou vždy napájeni střídavým proudem. Proto je přirozené usilovat o maximální využití střídavých elektromotorů. Zdá se, že to osvobozuje od potřeby vícenásobných přeměn energie.
Bohužel střídavé motory jsou svými vlastnostmi a především ovladatelností výrazně horší než motory stejnosměrný proud, takže se používají hlavně v instalacích, kde není vyžadována regulace otáček.
Relativně nedávno se začaly aktivně využívat regulované AC systémy s připojením AC motorů skrz.
Velmi široce používané v různá průmyslová odvětví hospodárnost a výroba asynchronních motorů díky jednoduchosti jejich výroby a vysoké spolehlivosti. Existují však čtyři hlavní typy indukční motory:
jednofázový asynchronní motor s rotorem nakrátko;
dvoufázový asynchronní motor s rotorem nakrátko;
třífázový asynchronní motor s rotorem nakrátko;
třífázový asynchronní motor s fázovým rotorem.

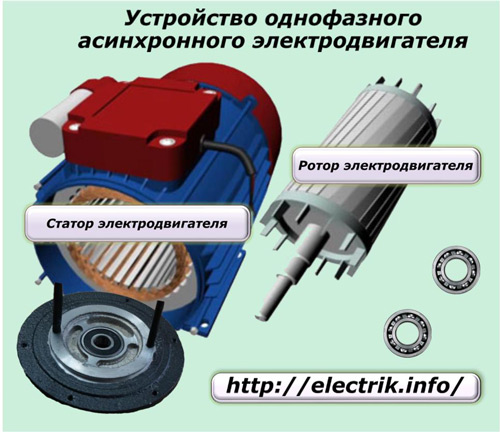
Jednofázový asynchronní motor obsahuje pouze jedno pracovní vinutí na statoru, do kterého je při provozu motoru přiváděn střídavý proud. Ale pro nastartování motoru je na jeho statoru přídavné vinutí, které je krátce připojeno k síti přes kondenzátor nebo indukčnost, případně zkratováno. To je nutné pro vytvoření počátečního fázového posunu, aby se rotor začal otáčet, jinak by pulzující magnetické pole statoru nevytlačilo rotor z jeho místa.
Rotor takového motoru, stejně jako jakýkoli jiný indukční motor s kotvou nakrátko, je válcové jádro s drážkami vyplněnými hliníkem, se současně odlévanými ventilačními lopatkami. Takový rotor typu "klec na veverku" se nazývá rotor s klecí nakrátko. Jednofázové motory se používají v aplikacích s nízkým výkonem, jako jsou pokojové ventilátory nebo malá čerpadla.

Dvoufázové indukční motory jsou nejúčinnější při provozu z jednofázové sítě střídavého proudu. Obsahují na statoru dvě pracovní vinutí umístěná kolmo, přičemž jedno z vinutí je připojeno do AC sítě přímo a druhé přes kondenzátor fázového posunu, takže se získá točivé magnetické pole a bez kondenzátoru by se samotný rotor nepohyboval.
Tyto motory mají také rotor s kotvou nakrátko a jejich použití je mnohem širší než u jednofázových motorů. Existují již pračky a různé stroje. Dvoufázové motory pro napájení z jednofázové sítě volal kondenzátorové motory, protože fázově posunutý kondenzátor je často jejich nedílnou součástí.

Třífázový asynchronní motor obsahuje tři pracovní vinutí na statoru, posunutá vůči sobě tak, že při připojení k třífázové síti magnetické pole jsou získány vzájemně posunuté v prostoru o 120 stupňů. Při připojení třífázový motor Na třífázová síť střídavým proudem vzniká točivé magnetické pole, které uvádí do pohybu rotor s klecí nakrátko.
Vinutí statoru třífázového motoru lze připojit podle schématu „hvězda“ nebo „trojúhelník“ a pro napájení motoru podle schématu „hvězda“ je vyžadováno vyšší napětí než u schématu „trojúhelník“, a proto jsou na motoru indikována dvě napětí, například: 127 / 220 nebo 220/380. Třífázové motory jsou nepostradatelné pro pohon různých obráběcích strojů, navijáků, kotoučových pil, jeřábů atd.

Třífázový asynchronní motor s fázovým rotorem má stator podobný výše popsaným typům motorů - v drážkách uložený vrstvený magnetický obvod se třemi vinutími, do fázového rotoru však nejsou zalité hliníkové tyče, ale plný- osazené třífázové vinutí je již položeno, in. Konce hvězdy vinutí fázového rotoru jsou přivedeny ke třem kontaktním kroužkům namontovaným na hřídeli rotoru a elektricky od ní izolovány.

1 - pouzdro s uzávěry, 2 - kartáče, 3 - traverza kartáče s držáky kartáčů, 4 - montážní čep traverzy kartáče, 5 - vedení kartáčů, 6 - blok, 7 - izolační pouzdro, 8 - kontaktní kroužky, 9 - vnější kryt ložiska, 10 - čep pro upevnění skříně a vík ložisek, 11 - zadní ložiskový štít, 12 - vinutí rotoru, 13 - držák vinutí, 14 - jádro rotoru, 15 - vinutí rotoru, 16 - přední ložiskový štít, 7 - vnější kryt ložiska, 18 - ventilační otvory , 19 - rám, 20 - jádro statoru, 21 - čepy vnitřního víka ložiska, 22 - bandáž, 23 - vnitřní víko ložiska, 21 - ložisko, 25 - hřídel, 26 - sběrací kroužky, 27 - vývody vinutí rotoru
Prostřednictvím kartáčů jsou prstence dodávány i s třífázovým střídavé napětí a spojení může být provedeno jak přímo, tak přes reostaty. Motory s vinutým rotorem jsou samozřejmě dražší, ale jejich zatížení je výrazně vyšší než u typů motorů s kotvou nakrátko. Je to právě kvůli zvýšenému výkonu a velkému startovací moment Tento typ motoru našel uplatnění v pohonech výtahů a jeřábů, tedy tam, kde se zařízení spouští pod zatížením a ne naprázdno.
Teorie elektromagnetismu, která je klíčová pro procesy probíhající v elektromotoru, je příliš složitá, proto pro pochopení principu fungování elektromotoru obecně postačí zjednodušené vysvětlení teoretických základů.
Pro důsledný přechod k pochopení přeměny elektrické energie na energii mechanickou je nutné osvěžit si paměť základních pojmů ze školního kurzu fyziky:
- Kolem vodiče navinutého na cívce vzniká při protékání stejnosměrného elektrického proudu elektromagnetické pole, které je svou charakteristikou shodné s polem běžného magnetu;
- Jádro ze železa a jeho slitin, umístěné uvnitř cívky, zlepšuje průchod elektromagnetického toku, což zvyšuje magnetické interakce;
- Střídavý proud v cívce neustále remagnetizuje jádro, zvané magnetický obvod, vyrobené ze speciální elektromagnetické oceli;
- Pohyb vodiče přes magnetické čáry v něm vyvolává elektromotorickou sílu (EMF);
- Magnetický tok je přenášen mezi dvěma magnetickými obvody přes malou vzduchovou mezeru;
Princip činnosti statoru
Cívky asynchronní motor tzv. vinutí, která jsou umístěna v drážkách statoru. Třífázové asynchronní motory mají stejná fázová vinutí, umístěná vzájemně symetricky a jejich osy svírají úhel 120°.
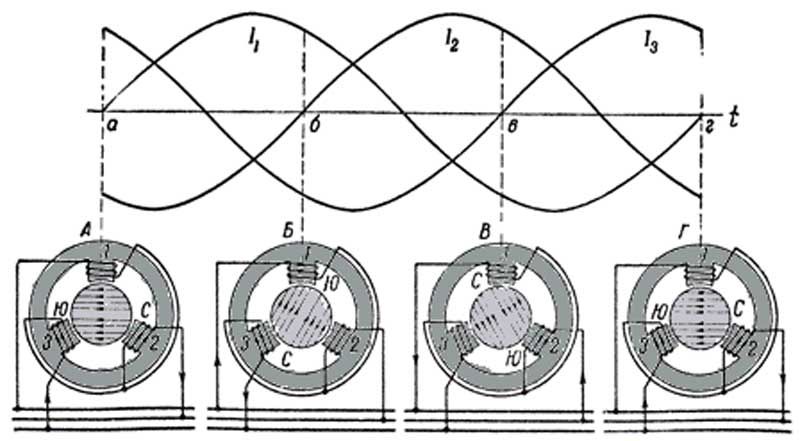
Sinusová vlna každé fáze vinutí motoru
Jak víte, sinusoida proudu každé fáze, vzhledem k předchozí, je posunuta o třetinu periody, díky čemuž se síla magnetických toků ve vinutí mění podle stejného principu. Sečtením směrových vektorů elektromagnetického pole v jediném časovém okamžiku můžete získat celkový magnetický tok.

Přidáním těchto vektorů v různých intervalech periody můžete vidět, že směr celkového magnetického toku se otáčí synchronně s kolísáním proudu. Data rotace magnetického toku lze zobrazit jako rotující permanentní podkovový magnet.
Principem činnosti střídavého motoru (synchronního nebo asynchronního) je tedy vytvoření točivého elektromagnetického pole statoru.
Princip synchronního otáčení
Pokud je pro experiment připevněn magnet ve tvaru podkovy k ose otáčení, pak se jakýkoli kovový předmět upevněný mezi póly na nezávislé ose bude pohybovat synchronně. Bylo by logické umístit do středu statoru s třífázová vinutí rotoru ve formě permanentního magnetu získat synchronní elektromotor.

Synchronní motor
Ale i když se použijí silné moderní magnety, vířivé proudy generované střídavým elektromagnetickým polem zahřejí rotor, čímž ho připraví o jeho magnetické vlastnosti, které závisí na teplotě permanentního magnetu. S ohledem na stator byl tento problém vyřešen montáží jádra ve formě desek ze speciální elektrotechnické oceli.

Stator je sestaven z plechů z elektrooceli. a) Sestavený pohled, b) samotný stator
Sestavit rotor ve formě lamelového permanentního magnetu tímto způsobem nelze, proto byly použity budicí cívky, které jsou permanentním elektromagnetem. Tento princip činnosti elektromotoru je synchronní - hřídel rotoru se pohybuje synchronně s elektromagnetickým polem statoru, který se otáčí.
Princip činnosti indukčního motoru
U indukčního motoru s veverkovou klecí je třeba zdůraznit dva klíčové body:
- Indukce elektrického proudu ve zkratovaných závitech vinutí rotoru v důsledku rotujícího elektromagnetického pole statoru;
- Výskyt magnetického toku vinutí rotoru, interagujícího s rotujícím magnetickým polem statoru.
Je třeba zvážit procesy vzniku magnetického pole rotoru od okamžiku spuštění motoru. Elektromagnetické pole statoru se začne otáčet ihned po přivedení napětí na vinutí statoru. Hřídel rotoru je v tomto okamžiku v klidu a v jeho závitech se indukuje střídavý proud s frekvencí rotace pole.

V každém časovém okamžiku, kdy pól rotujícího elektromagnetického pole prochází blízko jedné cívky nakrátko, se v ní vytvoří interagující magnetické pole, které má tendenci přitahovat cívku rotoru sledující ustupující pól pohybujícího se elektromagnetického pole.
K těmto procesům dochází ve všech zkratovaných cívkách při rotaci pole kolem nich, díky čemuž se objevuje celkový rotační moment hřídele rotoru. Tedy princip fungování elektromotoru asynchronního typu spočívá v interakci elektromagnetických polí statoru a rotoru.

posuvný efekt
Jak se hřídel motoru zrychluje, frekvence protínání zkratovaného rotoru se otáčí siločáry rotující magnetický tok se sníží. Hřídel motoru bude mít tendenci dohánět rotující pole.
Jakmile jsou však hřídel rotoru a pole statoru ve vzájemném klidu, zkratované závity již nebudou křížit siločáry elektromagnetického pole, což znamená, že nebudou indukovány. elektřina. Zmizení EMF v otáčkách rotoru povede ke ztrátě točivého momentu. Tento stav motoru se nazývá ideální volnoběh.
V reálných podmínkách však třecí síla povede ke ztrátě setrvačnosti a rotor elektromotoru se bude zpožďovat ve vztahu k rotujícímu poli statoru, což způsobí výskyt EMF ve zkratovaných otáčkách v důsledku jejich průsečík siločar magnetického toku.
Tento efekt se nazývá prokluz rotoru vůči statorovému poli, se kterým se nikdy nemůže usadit a otáčet se s ním synchronně.

Proto se takové motory nazývají asynchronní (nikoli synchronní). Jinými slovy, principem činnosti motoru s rotorem nakrátko je efekt skluzu, který je nezbytný pro výskyt EMF v otáčkách rotoru.
Optimální posuvný režim
Je zřejmé, že maximální EMF ve zkratovaných závitech bude indukováno v okamžiku spuštění, ale vrstvený magnetický obvod rotoru není dimenzován na tak časté převracení magnetizace, proto v tomto režimu bude účinnost elektromotoru a jeho točivý moment bude nízký.
Na druhou stranu, při přibližování se k synchronnímu pohybu hřídele rotoru a pole statoru se EMF přiblíží nule, což také povede ke zmizení momentu. Proto je asynchronní elektromotor se zkratovanými otáčkami rotoru vypočítán tak, že koeficient skluzu
byla 2÷5 %. V rámci těchto limitů budou charakteristiky motoru maximální.
Působivá síla asynchronního elektromotoru, který přeměňuje elektřinu na rotační energii, nevzniká žádnými mechanickými součástmi: pro tak silnou rotaci jsou k jeho „vycpávání“ použity pouze elektromagnety.
Rotor indukčního motoru: provedení
Rotor - prvek elektromotoru rotující uvnitř statoru (pevná součást), jehož hřídel je spojena s částmi pracovních jednotek, například pil, turbín a čerpadel. Laminované jádro je vyrobeno z jednotlivých plechů z elektrooceli s polouzavřenými nebo otevřenými štěrbinami.
Masivní rotor je pevný ocelový válec umístěný uvnitř statoru, na jehož povrchu je nalisováno jádro.
Bezkontaktní, nepřipojený k žádnému externímu elektrický obvod vinutí rotoru vytváří točivý moment a je dvou typů:
- zkratovaný (rotor nakrátko);
- fáze (fázový rotor).
klecový rotor
Roli elektromagnetů s póly obrácenými ke statoru hrají vysoce vodivé měděné tyče (pro stroje s vysokým výkonem) nebo hliníkové tyče (pro stroje s nižším výkonem) připájené nebo zalité do povrchu jádra a na koncích zkratované dvěma kroužky. . Tento design se nazývá „klec pro veverky“, kterou mu dal ruský elektroinženýr M. O. Dolivo-Dobrovolsky.
Tyče vinutí nemají žádnou izolaci, protože napětí v takovém vinutí je nulové. Běžněji používaný pro středně výkonné motorové tyče, snadno tavitelný hliník se vyznačuje nízkou hustotou a vysokou elektrickou vodivostí. Pro snížení vyšších harmonických elektromotorické síly (EMF) a odstranění pulzace magnetického pole mají rotorové tyče specificky vypočítaný úhel sklonu vzhledem k ose otáčení.
U motorů s nízkým výkonem jsou drážky jádra obvykle uzavřeny: oddělení rotoru od vzduchové mezery - ocelová deska umožňuje dodatečně upevnit vinutí, ale na úkor určitého zvýšení jejich indukčního odporu.
fázový rotor
Prakticky se neliší od třífázového vinutí statoru (ve více obecný případ- vícefázové) vinutí položené v drážkách jádra, jehož konce jsou spojeny podle schématu "hvězdy". Vývody vinutí jsou spojeny s kontaktními kroužky upevněnými na hřídeli rotoru, na které se při nastartování motoru přitlačují a nasouvají stacionární grafitové nebo kov-grafitové kartáče spojené s reostatem.
K omezení vznikajících vířivých proudů obvykle postačí místo izolačních laků oxidový film nanesený na povrch vinutí.
Třífázový spouštěcí nebo nastavovací rezistor přidaný do obvodu vinutí rotoru umožňuje měnit aktivní odpor obvodu rotoru, čímž pomáhá snížit vysoké startovací proudy. Reostaty lze použít:
- kovový drát nebo stupňovitý - s ručním nebo automatickým přepínáním z jedné úrovně odporu na druhou;
- kapalina, jejíž odpor je regulován hloubkou ponoření do elektrolytu elektrod.
Pro zvýšení životnosti kartáčů jsou některé modely fázových rotorů vybaveny speciálním mechanismem s veverkou, který po nastartování motoru zvedne kartáče a uzavře kroužky.
Asynchronní motory s fázovým rotorem se vyznačují složitější konstrukcí než s klecí nakrátko, ale zároveň optimálnějšími rozběhovými a regulačními charakteristikami.
Princip činnosti
Elektromagnety statoru jsou umístěny v blízkosti tyčí rotoru a přenášejí na ně elektřinu, aby jej otáčely. Magnetické pole indukované v rotoru bude následovat magnetické pole statoru, čímž dojde k mechanickému otáčení hřídele rotoru a přidružených jednotek. Elektromagnetická indukce vytvářená cívkami statoru zároveň tlačí proud na tyčích striktně od sebe. Hodnota proudu v tyčích se mění s časem.
Pište komentáře, doplnění článku, možná mi něco uniklo. Podívejte se, budu rád, když se vám na mých stránkách ještě něco hodí. Vše nejlepší.
Napovídá to už samotný název tohoto elektrického zařízení Elektrická energie, který k němu dorazí, se převede na rotační pohyb rotor. Přídavné jméno "asynchronní" navíc charakterizuje nesoulad, zpoždění rychlosti otáčení kotvy od magnetického pole statoru.
Slovo „jednofázový“ způsobuje nejednoznačnou definici. To je způsobeno skutečností, že v elektrice určuje několik jevů:
posun, úhlový rozdíl mezi vektorovými veličinami;
potenciální vodič dvou, tří nebo čtyřvodičových elektrický obvod střídavý proud;
jedno z vinutí statoru nebo rotoru třífázového motoru nebo generátoru.
Proto hned objasňujeme, že je obvyklé nazývat jednofázový elektromotor ten, který běží dvouvodičové sítě střídavý proud, reprezentovaný fází a nulovým potenciálem. Počet vinutí namontovaných v různých konstrukcích statoru toto určení neovlivňuje.
Konstrukce motoru
Podle technického zařízení se asynchronní motor skládá z:
1. stator - statická, pevná část, tvořená tělesem s různými elektrickými prvky umístěnými na něm;
2. rotor rotovaný silami elektromagnetického pole statoru.
Mechanické spojení těchto dvou částí je provedeno rotačními ložisky, jejichž vnitřní kroužky jsou uloženy na osazených pouzdrech hřídele rotoru a vnější kroužky jsou uloženy v ochranných bočních krytech upevněných na statoru.
Rotor
Jeho zařízení pro tyto modely je stejné jako u všech asynchronních motorů: magnetický obvod je namontován na ocelové hřídeli z vrstvených desek na bázi slitin měkkého železa. Na jeho vnějším povrchu jsou vytvořeny drážky, do kterých jsou namontovány navíjecí tyče z hliníku nebo mědi, na koncích zkratované k uzavíracím kroužkům.
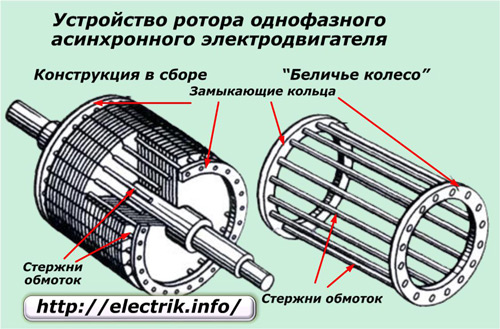
Ve vinutí rotoru protéká elektrický proud indukovaný magnetickým polem statoru a magnetický obvod slouží k dobrá přihrávka zde vzniklý magnetický tok.
Samostatné konstrukce rotoru pro jednofázové motory mohou být vyrobeny z nemagnetických nebo feromagnetických materiálů ve formě válce.
stator
Představena je také konstrukce statoru:
tělo;
magnetický obvod;
navíjení.
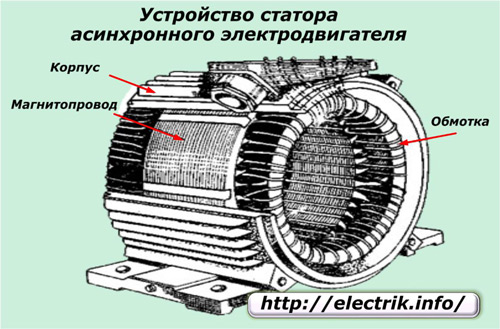
Jeho hlavním účelem je generovat stacionární nebo rotující elektromagnetické pole.
Statorové vinutí se obvykle skládá ze dvou obvodů:
1. dělník;
2. odpalovací zařízení.
U nejjednodušších provedení, určených pro ruční odvíjení kotvy, lze vyrobit pouze jedno vinutí.
Princip činnosti asynchronního jednofázového elektromotoru
Pro zjednodušení prezentace materiálu si představme, že statorové vinutí je vyrobeno pouze jedním otočením smyčky. Jeho dráty uvnitř statoru jsou neseny v kruhu o 180 úhlových stupňů. Prochází jím střídavý sinusový proud, který má kladné a záporné půlvlny. Vytváří ne rotující, ale pulzující magnetické pole.
Jak dochází k pulzacím magnetického pole
Analyzujme tento proces na příkladu toku kladné půlvlny proudu v časech t1, t2, t3.
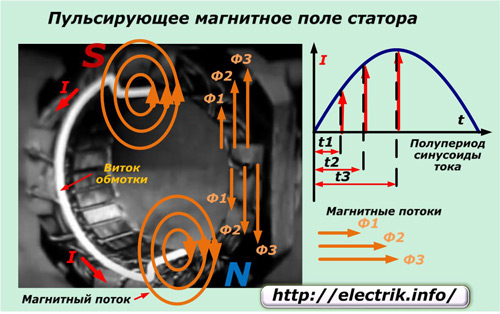
Vede po horní části vodiče směrem k nám a po spodní části od nás. V kolmé rovině představované magnetickým obvodem vznikají kolem vodiče magnetické toky F.
Proudy měnící se v amplitudě v uvažovaných okamžicích vytvářejí elektromagnetická pole různé velikosti F1, F2, F3. Protože proud v horní a dolní polovině je stejný, ale cívka je ohnutá, magnetické toky každé části směřují opačně a navzájem se ruší. Můžete to určit pravidlem gimletu nebo pravé ruky.
Jak je vidět, při kladné půlvlně rotace není magnetické pole pozorováno, ale dochází pouze k jeho pulzaci v horní a spodní části drátu, která je navíc v magnetickém obvodu vzájemně vyvážena. Ke stejnému procesu dochází v negativní části sinusoidy, kdy proudy mění směr na opačný.
Protože neexistuje žádné rotující magnetické pole, rotor zůstane nehybný, protože na něj nepůsobí žádné síly, aby se začal otáčet.
Jak vzniká rotace rotoru v pulzujícím poli
Pokud nyní dáme rotoru rotaci, i když ručně, bude pokračovat v tomto pohybu.
Pro vysvětlení tohoto jevu ukážeme, že celkový magnetický tok se mění ve frekvenci proudové sinusoidy z nuly na maximální hodnotu v každém půlcyklu (se změnou směru k opačnému) a skládá se ze dvou částí vytvořených v horní a spodní větve, jak je znázorněno na obrázku.
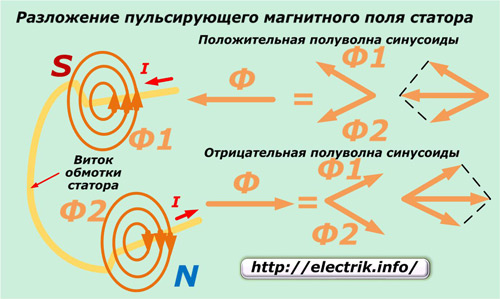
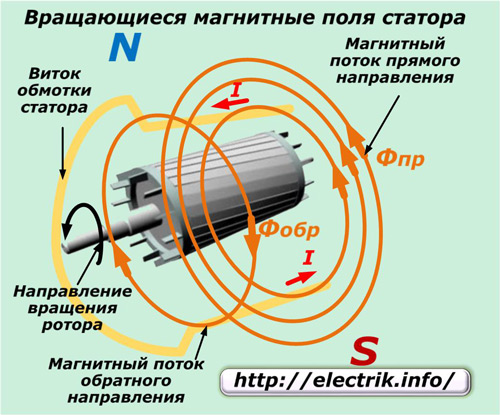
Magnetické pulzující pole statoru se skládá ze dvou kruhových s amplitudou Фmax/2 a pohybujících se v opačných směrech se stejnou frekvencí.
npr=nrev=f60/p=1.
Tento vzorec označuje:
npr a nrev frekvence otáčení magnetického pole statoru v dopředném a zpětném směru;
n1 je rychlost rotujícího magnetického toku (ot/min);
p je počet párů pólů;
f je frekvence proudu ve vinutí statoru.
Nyní dáme motoru otáčení rukou v jednom směru a ten okamžitě zachytí pohyb v důsledku vzniku točivého momentu způsobeného klouzáním rotoru vzhledem k různým magnetickým tokům dopředného a zpětného směru.
Připouštíme, že magnetický tok dopředného směru se shoduje s rotací rotoru a zpětný tok bude opačný. Označíme-li n2 frekvenci otáčení kotvy v otáčkách za minutu, pak můžeme napsat výraz n2< n1.
V tomto případě označujeme Spr \u003d (n1-n2) / n1 \u003d S.
Zde jsou indexy S a Spr skluzy indukčního motoru a rotoru relativního magnetického toku v dopředném směru.
Pro zpětný tok je klouzavý Srev vyjádřen podobným vzorcem, ale se změnou znaménka n2.
Srev \u003d (n1 - (-n2)) / n1 \u003d 2-Spr.
V souladu se zákonem elektromagnetické indukce působením přímých a zpětných magnetických toků ve vinutí rotoru, elektromotorická síla, který v něm vytvoří proudy stejných směrů I2pr a I2arr.

Jejich frekvence (v hertzech) bude přímo úměrná velikosti skluzu.
f2pr=f1∙Spr;
f2rev=f1∙Srev.
Navíc frekvence f2rev, tvořená indukovaným proudem I2rev, výrazně převyšuje frekvenci f2rev.
Například elektromotor běží v síti 50 Hz s n1=1500 a n2=1440 ot./min. Jeho rotor má skluz vzhledem k dopřednému magnetickému toku Spr=0,04 a proudovou frekvenci f2pr=2 Hz. Zpětný skluz Srev=1,96 a aktuální frekvence f2rev=98 Hz.
Na základě Ampérova zákona, když proud I2pr interaguje s magnetickým polem Фpr, objeví se točivý moment Mpr.
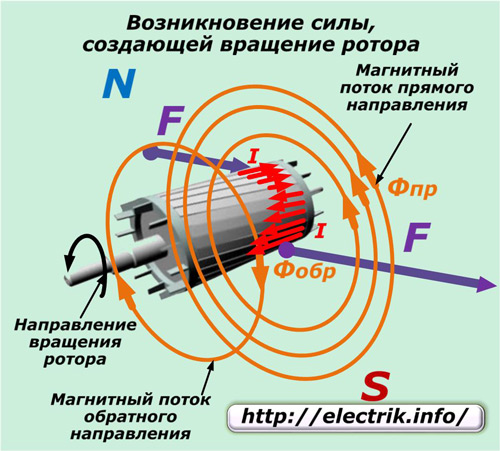
Mpr \u003d cm ∙ Fpr ∙ I2pr ∙cosφ2pr.
Zde je hodnota konstantního koeficientu cM závislá na konstrukci motoru.
V tomto případě působí také zpětný magnetický tok Mobr, který se vypočítá výrazem:
Mobr \u003d cm ∙ Fabr ∙ I2 arr ∙ cosφ2 arr.
V důsledku interakce těchto dvou toků se objeví výsledný:
M= Mpr-Mobr.
Pozornost! Při otáčení rotoru se v něm indukují proudy různých frekvencí, které vytvářejí momenty sil s různými směry. Proto se kotva motoru bude otáčet působením pulzujícího magnetického pole ve směru, ze kterého se začala otáčet.
Při překonávání jmenovité zátěže jednofázovým motorem vzniká malý skluz s hlavním podílem přímého momentu Mpr. Protipůsobení brzdného, zpětného magnetického pole Mobr ovlivňuje velmi málo kvůli rozdílu ve frekvencích proudů dopředného a zpětného směru.
f2reverzní proud výrazně převyšuje f2reverse a vytvořená indukční reaktance X2rev vysoce převyšuje aktivní složku a poskytuje velký demagnetizační efekt zpětného magnetického toku Fobre, který se nakonec snižuje.
Protože účiník motoru pod zatížením je malý, zpětný magnetický tok nemůže mít silný vliv na rotující rotor.
Když je jedna fáze sítě napájena motorem s pevným rotorem (n2=0), pak jsou skluzy vpřed i vzad rovny jedné a magnetická pole a síly dopředného a zpětného toku jsou vyvážené a rotace se nemění. nastat. Proto je nemožné odvinout kotvu elektromotoru z napájení jedné fáze.
Jak rychle určit otáčky motoru:
Jak vzniká rotace rotoru u jednofázového asynchronního motoru
Během celé historie provozu těchto zařízení byla vyvinuta následující konstrukční řešení:
1. ruční předení hřídele ručně nebo šňůrou;
2. použití přídavného vinutí připojeného v době startu z důvodu ohmického, kapacitního nebo indukčního odporu;
3. rozdělení magnetickou cívkou nakrátko magnetického obvodu statoru.
První metoda byla použita v počátečním vývoji a nebyla dále používána kvůli možným rizikům zranění při startu, i když nevyžaduje připojení dalších řetězů.
Použití fázově posunutého vinutí ve statoru
Aby došlo k počáteční rotaci rotoru vinutí statoru, je navíc v době startu připojen další pomocný, ale pouze posunutý o 90 stupňů. Provádí se silnějším drátem, aby procházel většími proudy, než které tečou v pracovním.
Schéma zapojení takového motoru je znázorněno na obrázku vpravo.

Zde se pro zapnutí používá tlačítko typu PNVS, které je speciálně navrženo pro takové motory a bylo široce používáno v provozu praček vyráběných v SSSR. Toto tlačítko okamžitě sepne 3 kontakty tak, že po stisknutí a uvolnění dva krajní zůstanou fixovány v zapnutém stavu a prostřední se na krátkou dobu sepne a pak se působením tlačítka vrátí do původní polohy. jaro.
Sepnuté krajní kontakty lze vypnout stisknutím sousedního tlačítka "Stop".

K deaktivaci přídavného vinutí v automatickém režimu se kromě tlačítkového spínače používají následující:
1. odstředivé spínače;
2. diferenciální nebo proudová relé;
Chcete-li zlepšit startování motoru při zatížení, doplňkové prvky ve vinutí s fázovým posunem.
V takovém obvodu je ohmický odpor namontován v sérii k přídavnému vinutí statoru. V tomto případě se navíjení závitů provádí bifilárním způsobem, což zajišťuje, že koeficient samoindukce cívky je velmi blízký nule.
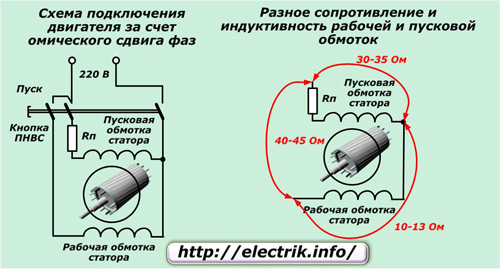
Díky implementaci těchto dvou technik, když proudy procházejí různými vinutími, dochází mezi nimi k fázovému posunu v řádu 30 stupňů, což je docela dost. Úhlový rozdíl vzniká změnou komplexních odporů v každém obvodu.
U této metody může být také spouštění vinutí s nízkou indukčností a vysokým odporem. K tomu se používá vinutí s malým počtem závitů drátu podhodnoceného průřezu.
Kapacitní fázový posun proudů umožňuje vytvořit krátkodobé spojení vinutí se sériově zapojeným kondenzátorem. Tento obvod funguje pouze při zapnutém motoru a poté se vypne.
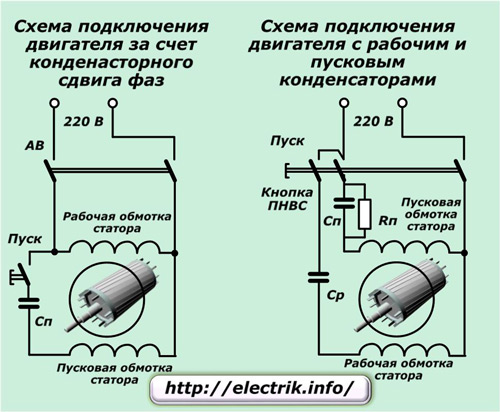
Kapacitní spouštění vytváří větší točivý moment a vyšší účiník než odporové nebo indukční spouštění. Může dosáhnout 45÷50 % nominální hodnoty.
V samostatných okruzích k řetězu pracovní vinutí, který je vždy zapnutý, také přidejte kapacitu. Díky tomu jsou proudy ve vinutí vychylovány o úhel řádově π/2. Zároveň je u statoru velmi patrný posun amplitudových maxim, který zajišťuje dobrý kroutící moment na hřídeli.
Díky této technice je motor schopen generovat větší výkon při startování. Tato metoda se však používá pouze u těžkých startovacích pohonů, například k roztočení bubnu. pračka naplněné prádlem vodou.
Spuštění kondenzátoru umožňuje změnit směr otáčení kotvy. K tomu stačí změnit polaritu připojení startovacího nebo pracovního vinutí.
Spojení jednofázový motor s dělenými póly
U asynchronních motorů o malém výkonu cca 100 W se využívá štěpení magnetického toku statoru díky zařazení měděné cívky nakrátko do pólu magnetického obvodu.
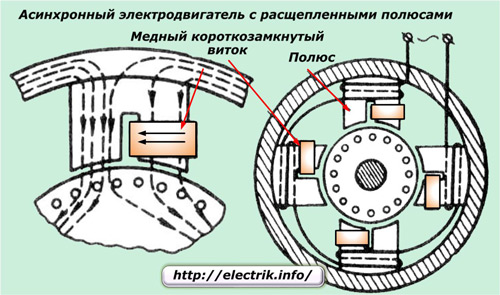
Takový pól rozříznutý na dvě části vytváří dodatečné magnetické pole, které je posunuto od hlavního podél úhlu a zeslabuje ho v místě pokrytém cívkou. To vytváří eliptické točivé pole, které generuje točivý moment konstantního směru.
V takových provedeních lze nalézt magnetické bočníky z ocelových plátů, které uzavírají okraje špiček pólů statoru.
Motory podobné konstrukce lze nalézt ve ventilátorových zařízeních pro foukání vzduchu. Nemají schopnost zpětného chodu.
Doporučujeme číst
 Podlahový věšák na oblečení - estetický a skladný Jak se jmenuje podlahový věšák na šaty
Podlahový věšák na oblečení - estetický a skladný Jak se jmenuje podlahový věšák na šaty Podmínky pro domácí skladování pórku v zimě: jak a kde je lepší skladovat pór, aby se v zimě ušetřil
Podmínky pro domácí skladování pórku v zimě: jak a kde je lepší skladovat pór, aby se v zimě ušetřil Opakovaně použitelné kapsle do kávovarů Dolce Gusto Emohome KAPSULE DOBÍJECÍ PLNĚNÍ OPAKOVANĚ POUŽITELNÁ KÁVA Prázdné kapsle do kávovaru dolce gusto
Opakovaně použitelné kapsle do kávovarů Dolce Gusto Emohome KAPSULE DOBÍJECÍ PLNĚNÍ OPAKOVANĚ POUŽITELNÁ KÁVA Prázdné kapsle do kávovaru dolce gusto Radiální vrtačky - přehled modelů
Radiální vrtačky - přehled modelů

