makina direktang kasalukuyang(DPT)
Device:
1. Stator (inductor).
2. Rotor (angkla).
Kasama sa stator ang: isang pabahay, isang magnetic circuit sa anyo ng mga pole, kung saan matatagpuan ang paikot-ikot na paggulo.
inductor pangalanan ang bahagi ng makina na idinisenyo upang lumikha ng magnetic field.
Kasama sa rotor ang: isang baras, isang magnetic circuit, sa mga grooves kung saan matatagpuan ang paikot-ikot, at isang kolektor na may mga brush.
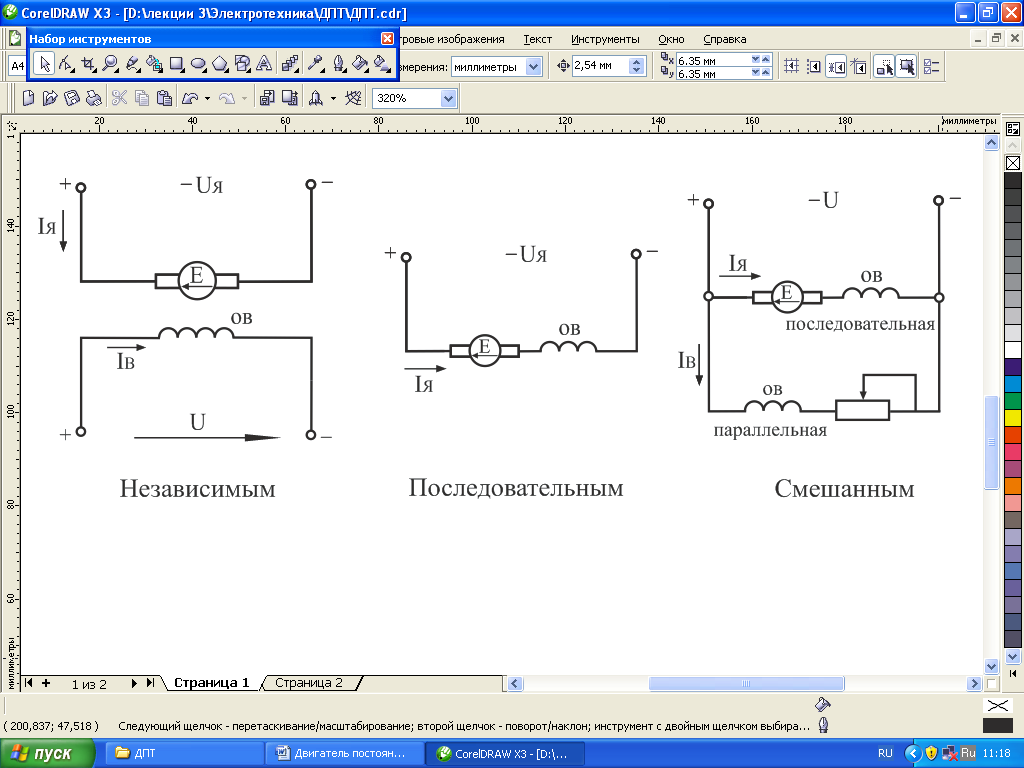
Simbolo:

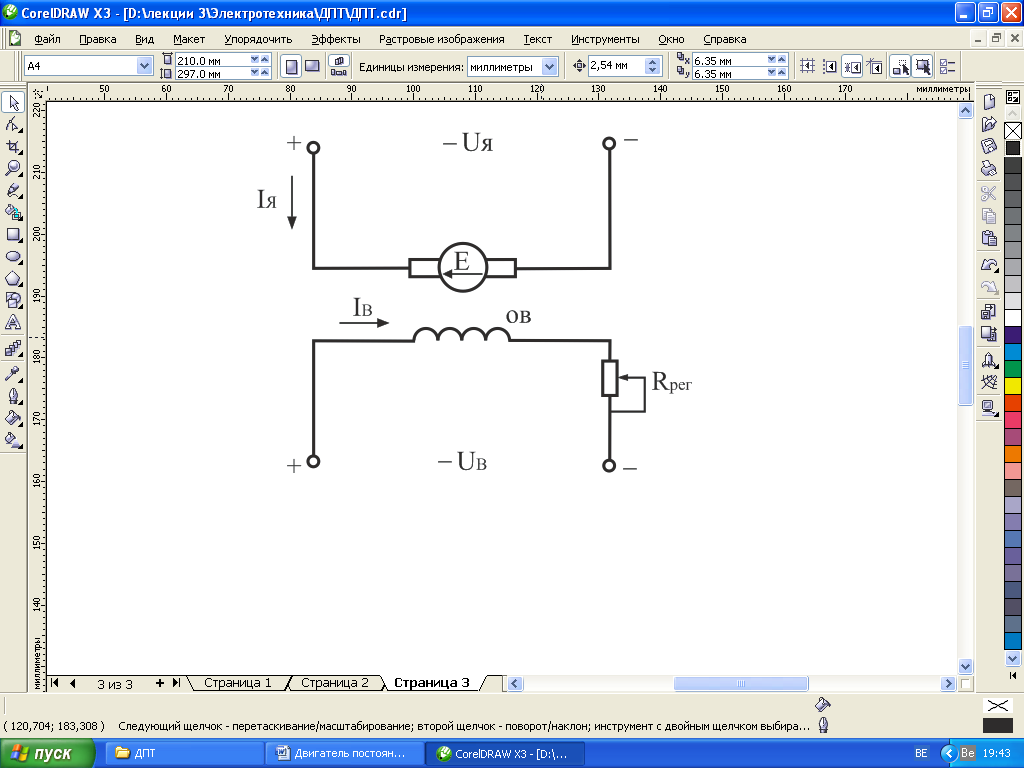
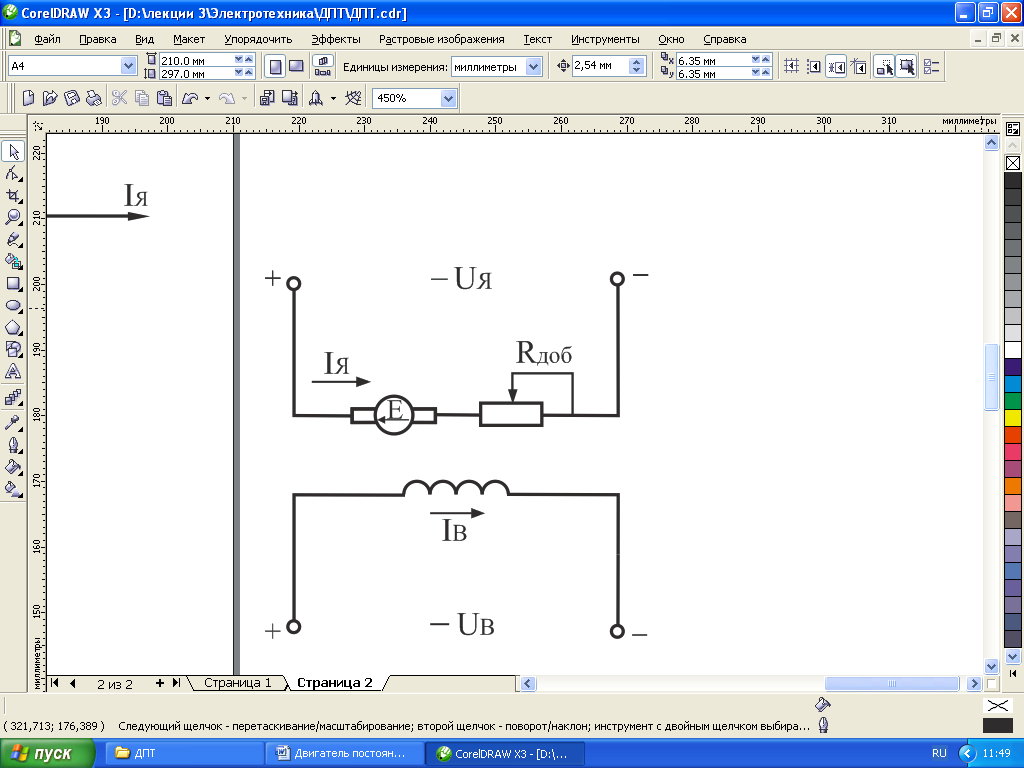
Mga scheme ng DPT na may iba't ibang uri kaguluhan:
Prinsipyo ng operasyon:
U V → I V → F;
kung saan ako V - kasalukuyang paggulo; I I - armature kasalukuyang.
Ang pakikipag-ugnayan ng kasalukuyang armature na may magnetic flux Ф ng stator ay lumilikha metalikang kuwintas:
kung saan ang C M ay ang salik ng disenyo.
Sa ilalim ng pagkilos ng M, ang rotor ay nagsisimulang umikot, habang tumatawid sa mga linya ng puwersa magnetic field, bilang isang resulta kung saan ang isang EMF ay naiimpluwensyahan dito, na tinatawag na EMF ng pag-ikot:
Mga pangunahing equation ng DPT:
Ang mga ito ay ang mga equation ng electrical equilibrium ng rotor:
kung saan ang pagbaba ng boltahe sa armature circuit; ay ang EMF ng pag-ikot.
Mula sa pormula na ito nakakakuha tayo ng isang praktikal na mahalagang kaugnayan:
Palitan sa halip na
At nakukuha namin:
![]() .
.
Ayon sa expression na ito, posible na bumuo ng isang mekanikal na katangian ng DPT n \u003d f (M), na ibinigay sa pag-load, i.e. M, maaari mong mahanap ang bilis ng pag-ikot na naaayon dito. Kung sa parehong oras U = U nom, Ф = Ф nom mayroon tayong natural na mekanikal na katangian.
Mekanikal na katangian ng DPT:
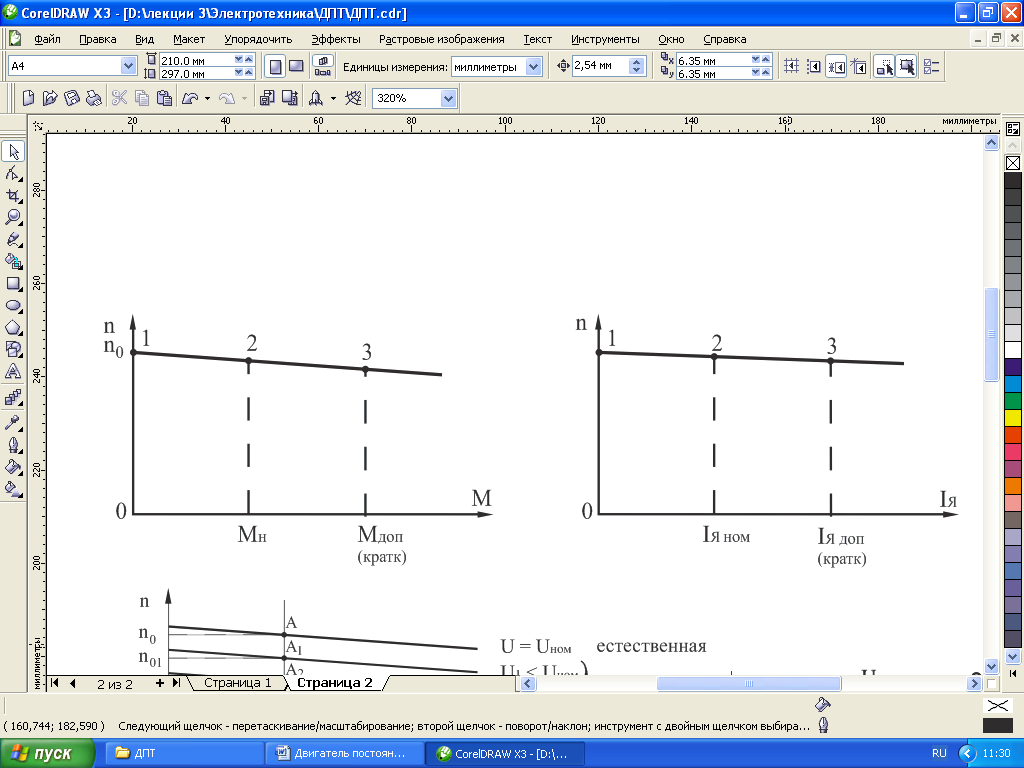
Point "1" - kawalang-ginagawa; mga coordinate М = 0, n = n 0 ;
"2" - nominal mode; mga coordinate M n, n n;
"3" - maximum na pinahihintulutang panandaliang pagkarga.
Plot 1–2 - pinapayagang pangmatagalang trabaho.
Seksyon 2–3 - panandaliang trabaho lamang ang pinapayagan.
Kadalasan i idagdag ko \u003d (2 ÷ 2.5) I i nom.
Kontrol ng bilis ng DPT:
![]() ,
,
nasaan ang paglaban ng kadena ng anchor.
Saan ito nanggaling posibilidad ng regulasyon ng bilis sa tatlong paraan: , , .
1. Isaalang-alang ang mga artipisyal na mekanikal na katangian sa kontrol ng bilis, sa pamamagitan ng pagbabago ng input.
Malinaw, ayon sa mga kondisyon ng pagpapatakbo ng engine, posible na magbago lamang sa direksyon ng pagbaba, at, samakatuwid, ang bilis ng engine ay maaari lamang iakma pababa, habang ang idle speed (point "1") ay bumababa.
Ang mga katangian ay kukuha ng anyo:
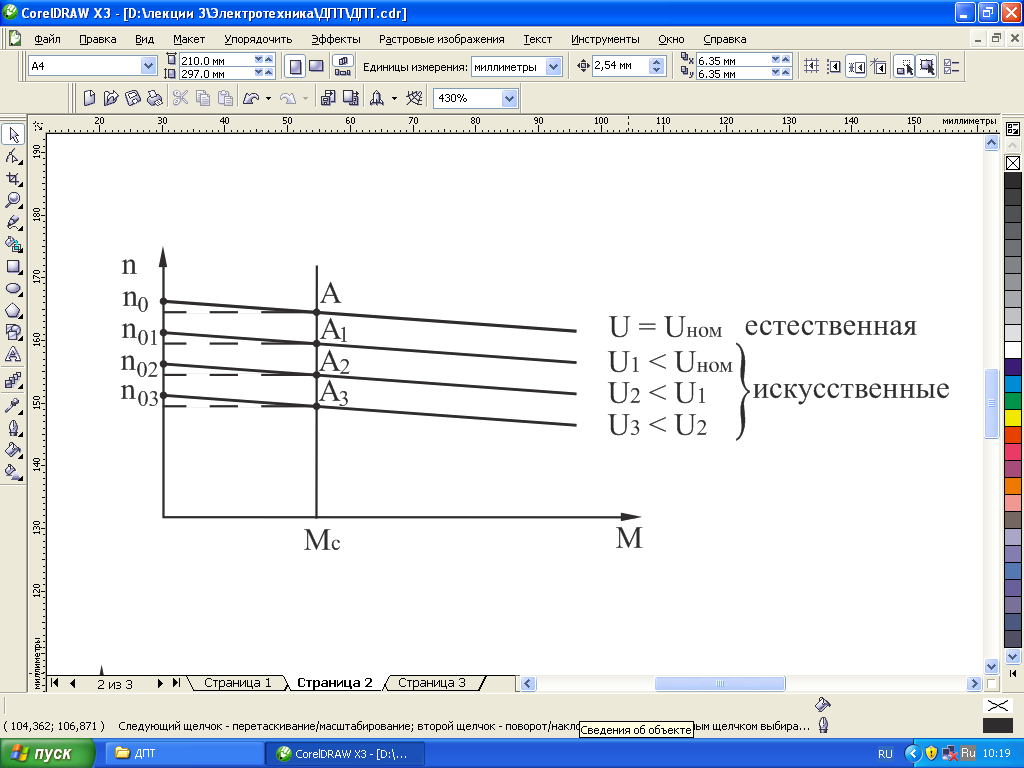
Kung ang pag-load sa makina ay kinakatawan ng katangian M C, pagkatapos ay sa pamamagitan ng pagbabago ng boltahe mula sa do maaari kang makakuha ng iba't ibang mga bilis mula sa n A hanggang n A3.
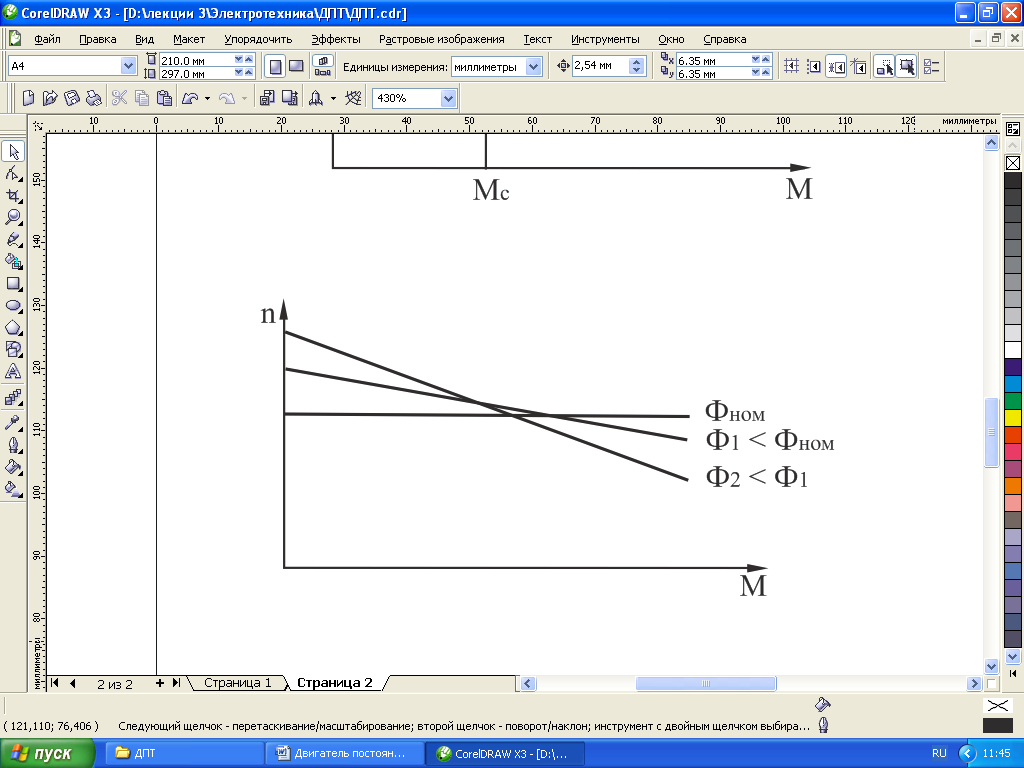
2. Pagkontrol ng bilis ng mga pagbabago sa magnitude ng magnetic flux.
Ang magnitude ng magnetic flux ay maaaring mabago gamit ang kasalukuyang I V, halimbawa, isang rheostat, sa direksyon lamang ng pagbaba. Ang pagbaba sa magnetic flux ay hahantong sa pagtaas ng bilis. Kaya, sa pamamagitan ng magnetic flux, ang bilis ay maaari lamang iakma pataas.
3. Isaalang-alang ang mga mekanikal na katangian sa kontrol ng bilis, pagbabago ng paglaban ng kadena ng anchor.
ay hindi nakasalalay sa R n, samakatuwid ang mga artipisyal na katangian ay may isang karaniwang punto .
Ang panimulang kasalukuyang kapag n = 0 at E = 0 ay may anyo at umabot sa hindi katanggap-tanggap na malalaking halaga, na hindi pinapayagan ang makina na magsimula. Upang mabawasan ang mga panimulang alon, ang isang karagdagang pagtutol ay ipinakilala sa armature circuit:
Ang kasalukuyang bumababa at ang katangian ay may anyo:

Prinsipyo ng pagpapatakbo (sa halimbawa ng isang makina parallel excitation). Kung ang boltahe U ay inilapat sa motor, ang kasalukuyang I c ay dumadaloy sa circuit ng paggulo, at ang kasalukuyang I i ay dumadaloy sa armature circuit. Ang kasalukuyang paggulo ay lumilikha ng MMF F in = I in W in, na nagpapasigla sa magnetic flux sa machine F in. Ang armature current, naman, ay lumilikha ng magnetic flux ng armature reaction F i. Ang resultang magnetic flux F res \u003d F sa + F i.
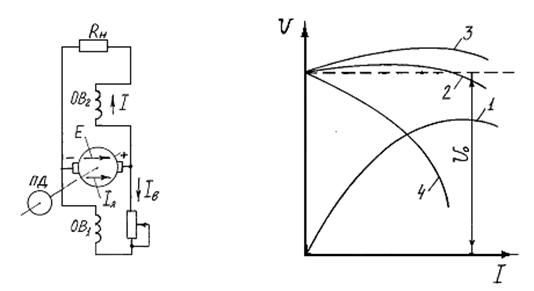
Fig.1.23 1.24
Sa armature circuit, ang kasalukuyang I i ay lumilikha ng boltahe drop R i I i. Alinsunod sa batas ng electromagnetic force EMC, kapag ang kasalukuyang I I at ang magnetic flux F res ay nakikipag-ugnayan, isang metalikang kuwintas M BP ay nilikha. Sa steady state M temp. \u003d M pr. Kapag ang mga konduktor ng armature ay tumawid sa magnetic field F res, alinsunod sa batas ng electromagnetic induction EMP, isang EMF ang na-induce sa kanila, na nakadirekta laban sa mains voltage U.
Pag-uuri ng mga makina. Ayon sa circuit para sa paglipat sa mga windings ng paggulo ng mga pangunahing pole, ang mga motor ng DC ay nahahati sa mga motor na independyente, parallel, serye at halo-halong paggulo.
sa mga makina malayang paggulo ang paikot-ikot na paggulo ay pinapagana ng isang hiwalay na pinagmumulan ng boltahe ng DC. Sa parallel excitation motors, ang field winding at ang armature winding ay konektado sa parallel at pinapagana mula sa parehong pinagmulan. Sa series at mixed excitation motors, mayroong excitation winding na konektado sa series na may armature winding. Sa mga motor na may mababang kapangyarihan, ang flux ng paggulo ay maaaring malikha gamit ang mga permanenteng magnet. Ang mga motor ng parallel at mixed excitation ay nakakahanap ng pinakadakilang aplikasyon.
Mga pangunahing equation at dami na nagpapakilala sa mga makina. Ang mga halagang ito ay: mekanikal na kapangyarihan sa shaft P 2, supply boltahe U, kasalukuyang natupok mula sa network I, armature current I I, excitation current I in, rotational speed n, electromagnetic na sandali M um. Ang kaugnayan sa pagitan ng mga dami na ito ay inilarawan:
Ø electromagnetic torque equation:
M em \u003d C m I I F;
Ø sa pamamagitan ng equation ng electrical state ng armature circuit:
U \u003d E pr + R i I i; (1.4)
E pr \u003d C E nФ;
Ø moment equation:
M em \u003d M s + M pawis + M d,
kung saan ang M s ay ang sandali ng paglaban sa baras na nilikha ng pagkarga; M sweat - ang sandali ng pagkalugi na nilikha ng lahat ng uri ng pagkalugi sa makina; M d - dynamic na sandali na nilikha ng mga inertial na puwersa;
Mga katangian ng mga makina. Ang pinakamahalaga sa mga katangian ay mekanikal n (M s) - ang pag-asa ng bilis ng pag-ikot n sa metalikang kuwintas sa baras (pagkatapos nito, ang index na "c" ay tinanggal) sa U = const, I в = const. Ipinapakita nito ang impluwensya ng mekanikal na pagkarga (torque) sa baras ng motor sa bilis, na lalong mahalaga na malaman kapag pumipili at nagpapatakbo ng mga motor. Iba pang mga katangian ng engine: pagsasaayos n (I c), high-speed n (I i), nagtatrabaho M, R 1, n, I, h (R 2) - ay hindi isinasaalang-alang nang detalyado dito.
Ang mga mekanikal na katangian ay maaaring natural o artipisyal. Sa ilalim natural Ang mga katangian ay nauunawaan bilang mga katangiang kinuha sa kawalan ng anumang karagdagang mga resistensya sa circuit, halimbawa, mga rheostat sa armature o excitation circuit, artipisyal- sa pagkakaroon ng gayong mga pagtutol.
Mechanical equationmga katangian ng engine. Maaari itong makuha mula sa (1.1). Pinapalitan namin sa halip na E ang halaga nito sa (1.4), pagkatapos
n \u003d (U - R i I i) / C E F. (1.5)
Ang pagpapalit ng I i sa halaga nito mula sa (1.2), makuha natin ang equation mekanikal na katangian:
n= ![]() (1.6)
(1.6)
Ang uri ng mekanikal na katangian ay natutukoy sa pamamagitan ng likas na katangian ng pag-asa ng pagkilos ng bagay sa pagkarga ng motor, na kung saan ay depende sa circuit para sa paglipat sa paikot-ikot na paggulo.
Pagbaliktad ng makina. Ang pagbabalik ng makina ay nauunawaan bilang isang pagbabago sa direksyon ng pag-ikot ng armature nito. Ang mga posibleng paraan ng pagbaligtad ay sumusunod sa kaugnayan (1.2). Kung binago mo ang direksyon ng kasalukuyang armature o ang daloy ng makina, pagkatapos ay ang pag-sign, at samakatuwid ang direksyon ng metalikang kuwintas, ay nagbabago. Sa pagsasagawa, ito ay nakakamit sa pamamagitan ng paglipat ng mga lead o ang armature winding, o ang excitation winding. Gayunpaman, ang sabay-sabay na paglipat ng mga output ng parehong windings o isang pagbabago sa polarity ng boltahe na nagbibigay ng motor (maliban sa isang independiyenteng motor ng paggulo) ay hindi humahantong sa isang pagbabago sa tanda ng metalikang kuwintas at, samakatuwid, sa isang pagbabago sa direksyon ng pag-ikot.
Pagsisimula ng mga makinadirektang kasalukuyang. Mayroong dalawang pangunahing kinakailangan para sa pagsisimula ng mga makina: upang magbigay ng torque na kinakailangan para sa pagsisimula at pagpapabilis ng armature at upang maiwasan ang labis na daloy sa pamamagitan ng armature sa panahon ng pagsisimula. mataas na agos delikado sa makina. Tatlong paraan ng pagsisimula ay halos posible: direktang pagsisimula, magsimula kapag ang isang rheostat ay konektado sa armature circuit, at magsimula sa undervoltage sa kadena ng anchor.
Sa direktang pagsisimula, ang armature circuit ay agad na inililipat sa buong boltahe. Dahil sa unang sandali ng pagsisimula ng armature ay nakatigil (n = 0), walang back-emf (E pr = C E nF). Pagkatapos mula sa (1.4) sumusunod na ang panimulang kasalukuyang ng armature I i, p \u003d U / R i.
Dahil R i \u003d 0.02 ¸ 1.10 Ohm, pagkatapos ay I i, n \u003d (50 ¸ 100) I nom, na hindi katanggap-tanggap. Samakatuwid, ang direktang pagsisimula ay posible lamang para sa mga low-power na motor, kung saan ang I i, n (4¸6) I nom at ang acceleration ng motor ay tumatagal ng mas mababa sa 1 s.
Ang simula kapag ang panimulang rheostat R p ay naka-on sa serye na may armature ay isasaalang-alang gamit ang halimbawa ng circuit sa fig. 1.25. Ang panimulang kasalukuyang sa kasong ito ay:
I i,n \u003d U / (R i + R p). (1.7)
Resistance R p \u003d U / I i, p - R i ay pinili upang sa unang sandali ng pagsisimula, kapag E pr \u003d 0, I i, p \u003d (1.4¸2.5) I nom (mas malaking numero ang tumutukoy sa mga makina na mas kaunting lakas).
Habang bumibilis ang armature, tumataas ang E pr, na nagpapababa sa boltahe sa armature (i.e., bumababa ang numerator (1.7), at ang resistensya ng rheostat R p ay output.
Bago magsimula, ipinapakita ang rheostat R p, na kinakailangan upang matiyak ang maximum na daloy at, samakatuwid, metalikang kuwintas sa pagsisimula (M p \u003d C m I I, p F). Habang bumibilis ang armature, ipinapasok ang rheostat R p hanggang sa maabot ang kinakailangang bilis.
Ang pagsisimula sa isang limitadong panimulang kasalukuyang ay posible kapag ang motor armature ay pinapagana mula sa isang hiwalay na pinagmulan (generator, rectifier) na may adjustable na boltahe. Ang pagsisimula ng kasalukuyang limitasyon at makinis na acceleration ng motor ay ibinibigay ng unti-unting pagtaas sa armature boltahe mula sa zero hanggang sa kinakailangang halaga.
Ang pamamaraang isinasaalang-alang ay nakakahanap ng aplikasyon sa mga sistema ng kontrol at regulasyon ng mga makapangyarihang DC motors (tingnan ang sugnay 1.14.3).
§ 115. MGA KATANGIAN NG DC MOTORS
Ang mga gumaganang katangian ng mga makina ay natutukoy sa pamamagitan ng kanilang mga katangian ng pagganap, na kung saan ay ang mga dependency ng bilang ng mga rebolusyon t, torque Me, natupok kasalukuyang I, kapangyarihan P1 at kahusayan η sa kapaki-pakinabang na kapangyarihan sa baras P2- Ang mga dependency na ito ay tumutugma sa natural mga kondisyon ng makina, ibig sabihin, ang makina ay hindi kinokontrol at ang boltahe ng mains ay nananatiling pare-pareho. Kaya
tulad ng pagbabago sa kapaki-pakinabang na kapangyarihan na P2 (ibig sabihin, ang pagkarga sa baras), nagbabago rin ang kasalukuyang nasa armature
machine, ang mga katangian ng pagganap ay madalas na naka-plot bilang isang function ng armature kasalukuyang. Ang mga dependency ng metalikang kuwintas at bilis ng pag-ikot sa kasalukuyang sa armature para sa motor ng parallel excitation ay ipinapakita sa fig. 152, at ang diagram ng isang daan ay ipinapakita sa itaas (tingnan ang Fig. 151).
Ang bilis ng engine ay tinutukoy ng sumusunod na expression:
> Sa pagtaas ng load sa motor shaft, tumataas din ang kasalukuyang nasa armature. Nagdudulot ito ng pagtaas sa pagbaba ng boltahe sa paglaban ng armature winding at ng mga contact ng brush.
Dahil ang kasalukuyang paggulo ay nananatiling pare-pareho (ang makina ay hindi kinokontrol), ang magnetic flux ay pare-pareho din. Gayunpaman, sa pagtaas ng kasalukuyang sa armature, ang demagnetizing effect ng armature reaction flux ay tumataas at ang magnetic flux Ф ay medyo bumababa. Ang pagtaas sa Iarya ay nagdudulot ng pagbaba sa bilis ng makina, at ang pagbaba sa Ф ay nagpapataas ng bilis. Karaniwan, ang pagbaba ng boltahe ay nakakaapekto sa pagbabago ng bilis sa isang bahagyang mas mataas na lawak kaysa sa tugon ng armature, upang habang tumataas ang kasalukuyang armature, bumababa ang bilis. Ang pagbabago sa bilis para sa ganitong uri ng motor ay hindi gaanong mahalaga at hindi lalampas sa 5% kapag ang pagkarga ay nagbabago mula sa zero hanggang sa nominal, ibig sabihin, ang mga parallel excitation motor ay may matibay na katangian ng bilis.
Sa patuloy na magnetic flux, ang pagtitiwala ng metalikang kuwintas sa kasalukuyang nasa armature ay kakatawanin ng isang tuwid na linya. Ngunit sa ilalim ng impluwensya

Ang metalikang kuwintas ng armature reaction motor na may pagtaas sa load ay isang bahagyang pagbaba sa magnetic flux at ang pag-asa ng sandali ay bababa nang bahagya sa isang tuwid na linya.
Ang diagram ng sequential excitation motor ay ipinapakita sa fig. 153. Ang panimulang rheostat ng makinang ito ay may dalawang clamp lamang, dahil ang paikot-ikot na paggulo at armature ay bumubuo ng isang serye ng circuit. Ang mga katangian ng makina ay ipinapakita sa fig. 154. Bilis ng makina sunud-sunod na paggulo ay tinukoy ng sumusunod na expression:
![]()
kung saan ang rc ay ang paglaban ng paikot-ikot na paggulo ng serye. Sa isang serye ng paggulo ng motor, ang magnetic flux ay hindi nananatiling pare-pareho, ngunit nagbabago nang malaki sa mga pagbabago sa pagkarga, na nagiging sanhi ng isang makabuluhang pagbabago sa bilis. Dahil ang pagbaba ng boltahe sa armature resistance at sa field winding ay napakaliit kumpara sa inilapat na boltahe, ang bilang ng mga rebolusyon ay maaaring humigit-kumulang na tinutukoy ng sumusunod na expression:
Kung pinabayaan natin ang saturation ng bakal, maaari nating isaalang-alang ang magnetic flux na proporsyonal sa kasalukuyang sa field winding, na katumbas ng kasalukuyang nasa armature. Dahil dito, para sa isang serye ng paggulo ng motor, ang bilis ng pag-ikot ay inversely proporsyonal sa kasalukuyang nasa armature at ang bilang ng mga rebolusyon ay bumababa nang husto sa pagtaas ng pagkarga, ibig sabihin, ang motor ay may katangian na malambot na bilis. Habang bumababa ang load, tumataas ang bilis ng engine. Kapag idling (Ia = 0), ang bilis ng engine ay tumataas nang walang katiyakan, ibig sabihin, ang makina ay napupunta sa overdrive.
Kaya, ang isang katangian ng pag-aari ng mga serye ng paggulo ng mga motor ay ang hindi pagkakatanggap ng pag-load ng pag-load, ibig sabihin, idling o sa mababang load. Ang makina ay may pinakamababa pinahihintulutang pagkarga, na 25-30% ng nominal. Kapag ang load ay mas mababa sa minimum na pinahihintulutang bilis ng engine ay tumataas nang husto, na maaaring maging sanhi ng pagkasira nito. Samakatuwid, kapag ang pagpapadanak o biglaang pagbabawas ng pagkarga ay posible, ang paggamit ng mga series-excited na motor ay hindi katanggap-tanggap.
Sa napakaliit na motor, ang pag-load ng pag-load ay hindi magiging sanhi ng runaway, dahil ang mekanikal na pagkawala ng motor ay magiging sapat. mabigat na dalahin para sa kanya.
Ang metalikang kuwintas ng serye ng motor ng paggulo, na isinasaalang-alang ang proporsyonal na relasyon sa pagitan ng magnetic flux at ang kasalukuyang sa armature (F \u003d C "Ia), ay maaaring matukoy ng sumusunod na expression:
kung saan K'=KC'
mga. Ang metalikang kuwintas ay proporsyonal sa parisukat ng kasalukuyang. Gayunpaman, sa mataas na alon, ang saturation ng bakal ay nakakaapekto at ang pag-asa ng sandali ay lumalapit sa isang tuwid na linya. Kaya, ang mga makina ng ganitong uri ay bumuo ng malalaking torque sa mababang bilis, na mahalaga kapag nagsisimula ng malalaking inertial na masa at labis na karga. Ang mga motor na ito ay malawakang ginagamit sa mga aplikasyon ng transportasyon at pag-aangat.
Sa halo-halong paggulo, ang parehong consonant at counter switching on ng excitation windings ay posible.
Ang mga motor na may kabaligtaran na paikot-ikot ay hindi malawakang ginagamit, dahil ang mga ito ay may mga mahihirap na katangian ng pagsisimula at hindi matatag.
Ang mga katangian ng bilis ng mixed excitation motors ay sumasakop sa isang intermediate na posisyon sa pagitan ng mga katangian ng parallel at series excitation motors.
Sa pagtaas ng armature current, ang bilang ng mga armature revolution ay bumababa sa mas malaking lawak kaysa sa parallel excitation motors, dahil sa pagtaas ng magnetic flux na dulot ng pagtaas ng current sa series field winding. Kapag idling, ang mixed-excitation motor ay hindi tumatakbo, dahil ang magnetic flux ay hindi bumababa sa zero dahil sa pagkakaroon ng isang parallel field winding.
Sa pagtaas ng load sa mixed excitation motors, tumataas ang magnetic flux at tumataas ang torque sa mas malaking lawak kaysa sa parallel excitation motors, ngunit sa mas mababang lawak kaysa sa series excitation motors.
1. Ang aparato ng mga DC machine.
Ang mga DC machine, na maaaring gumana bilang isang motor at bilang isang generator, ay may isang bilang ng mga pakinabang. Kapag sinimulan ang makina, ang isang malaking panimulang metalikang kuwintas ay nabuo. Samakatuwid, ang mga naturang makina ay iroko na ginagamit bilang traksyon sa mga de-kuryenteng sasakyan. Ang malawak na mga limitasyon at kinis ng kontrol ng bilis ay tumutukoy sa paggamit ng mga DC motor sa iba't ibang mga awtomatikong sistema ng kontrol.
Ang mga generator ng DC ay ginagamit upang paganahin ang iba't ibang mga yunit ng kuryente (lalo na, ang mga de-kalidad na welding machine). Ang kapangyarihan ng mga DC machine ay ibang-iba:
mula sa ilang watts hanggang sampu-sampung kilowatts. Sa transportasyon, ginagamit ang mga makina na may boltahe na 550 V at lakas na 40 - 45 kW (tram), na may boltahe na 1500 V at lakas na hanggang 12,000 kW (mga de-koryenteng lokomotibo). Ang kahusayan sa mga makina ng DC ay mas mataas, mas malaki ang kapangyarihan. Sa kapangyarihan hanggang sa 100 W na kahusayan = 62%, na may kapangyarihan hanggang sa 100 kW na kahusayan ay umabot sa 91%. Ang kawalan ng mga DC machine ay ang pagkakaroon ng isang brush-collector assembly, na isa sa mga hindi maaasahang bahagi ng makina. Isaalang-alang ang aparato ng pinakasimpleng DC machine:
1 - mga pole, kadalasang kumakatawan sa isang coil na may core,
2 - armature (o rotor) - umiikot na bahagi,
3 - mga konduktor sa mga grooves ng armature.
Ang nakapirming bahagi kung saan ang mga pole ay naayos ay tinatawag na stator o inductor. Ang inductor ay nagsisilbing lumikha ng pangunahing magnetic field ng makina. GN - geometric neutral, isang linya na dumadaan sa gitna sa pagitan ng mga katabing pole.
Ang pinakamahalagang tampok ng disenyo ng mga DC machine ay ang pagkakaroon ng isang brush-collector assembly: 1 - brush, 2 - collector plate. Ang mga output ng mga indibidwal na seksyon ng armature winding ay angkop para sa mga plate ng kolektor. Ang yunit ng brush-collector ay gumaganap:
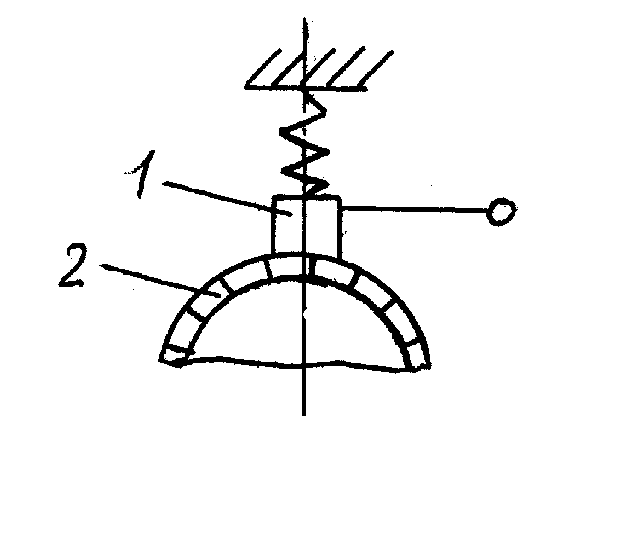
Sliding contact sa pagitan ng mga nakapirming panlabas na lead at umiikot na mga seksyon ng armature winding,
Pagwawasto ng kasalukuyang sa generator mode,
Pag-convert ng direktang kasalukuyang sa alternating current (inverting) sa motor mode.
Ang mga DC machine, tulad ng maraming iba pang mga de-koryenteng makina, ay nababaligtad, i.e. ang parehong makina ay maaaring gumana pareho bilang isang generator at bilang isang makina.
2. Ang prinsipyo ng pagpapatakbo ng generator at engine.
Sa mode ng generator, ang armature ng makina ay umiikot sa ilalim ng impluwensya ng isang panlabas na sandali. Sa pagitan ng mga pole ng stator ay may pare-pareho ang magnetic flux na tumatagos sa armature. Ang mga armature winding conductor ay gumagalaw sa isang magnetic field at, samakatuwid, ang isang EMF ay sapilitan sa kanila, ang direksyon kung saan maaaring matukoy ng "kanang kamay" na panuntunan. Sa kasong ito, ang isang positibong potensyal ay lumitaw sa isang brush na may kaugnayan sa pangalawa. Kung ang isang load ay konektado sa mga terminal ng generator, ang kasalukuyang ay dadaloy dito. Matapos i-on ang armature sa isang tiyak na anggulo, ang mga brush ay ikokonekta sa isa pang pares ng mga plato, i.e. konektado sa isa pang pagliko ng armature winding, ang EMF kung saan magkakaroon ng parehong direksyon. Kaya, ang generator ay bumubuo
electric current, at ang direksyon ng kasalukuyang dumadaloy sa load ay hindi nagbabago.
Kapag ang load ay konektado sa generator at sa pagdating ng armature current, isang electromagnetic torque ang nangyayari sa shaft, na nakadirekta laban sa direksyon ng pag-ikot ng armature. Sa motor mode, ang mga clamp ng makina ay ibinibigay patuloy na presyon, at kasalukuyang dumadaloy sa armature winding. Ang mga conductor ng armature winding ay nasa magnetic field ng makina na nilikha ng kasalukuyang paggulo at, samakatuwid, sa kanila, ayon sa batas
Ampere, pwersa ang kikilos. Ang kumbinasyon ng mga puwersang ito ay lumilikha ng isang metalikang kuwintas, sa ilalim ng impluwensya kung saan ang armature ay iikot. Kapag umiikot ang armature, ang isang EMF ay na-induce sa paikot-ikot nito, na nakadirekta patungo sa kasalukuyang, at samakatuwid para sa mga motor ito ay tinatawag na back-EMF.
3. Armature emf at torque equation.
Isaalang-alang ang isa sa mga conductor sa armature slot. Hayaang gumalaw ito (sa panahon ng pag-ikot ng armature) na may linear na bilis V, pagkatapos ay ang isang EMF ay sapilitan sa konduktor na ito:
E \u003d V cf l i V kasalanan  ,
,
saan \u003d 90, lа - ang haba ng aktibong bahagi ng armature, V cf - ang average na magnetic field induction sa puwang.
Hayaang 2a ang bilang ng magkatulad na mga sanga. Dahil ang EMF ay katumbas ng EMF ng isang sangay, maaari nating isulat:

kung saan ang E i ay ang kinakailangang EMF ng armature, ang N ay ang bilang ng lahat ng armature conductor.
kung saan ang Ф ay ang magnetic flux ng isang poste, at ang S ay ang lugar na napasok ng flux na ito, kung gayon

dito p ay ang bilang ng mga pares ng mga pole (p = 1,2, ...).
Ang bilis ng V ay maaaring ipahayag sa mga tuntunin ng bilis ng armature n:
Ang pagpapalit ng mga resultang expression sa formula para sa E i:

pagkatapos ay nakuha namin sa wakas:
E i \u003d C E F n.
Makikita na ang EMF ng armature ay proporsyonal sa dalas ng pag-ikot ng armature at ang magnetic flux ng mga pole. Gamit ang batas ng Ampere, nakita natin ang puwersa kung saan kumikilos ang field ng paggulo sa isang armature conductor:
F = V cf l i I kasalanan
,
Dito = 90 , I - kasalukuyang sa konduktor.
Ang puwersang ito ay lumilikha ng isang metalikang kuwintas:
kung saan ang D ay ang diameter ng armature. Ang pag-multiply sa kabuuang bilang ng mga konduktor N, nakukuha natin ang kabuuang sandali:
Ang average na induction Sa cf, tulad ng dati, nakukuha natin sa pamamagitan ng paghahati ng magnetic flux ng isang poste sa lugar na tinagos ng flux na ito:
Dahil ang armature current ay kumakalat sa magkatulad na mga sanga, ang kasalukuyang sa isang konduktor ay tinutukoy ng expression:

Ang pagpapalit ng mga expression para sa B cf at I sa formula para sa pangkalahatang sandali, nakukuha natin ang:

Kung ipinakilala natin ang isang constructive coefficient
pagkatapos ay maaari na tayong magsulat:
Tulad ng nakikita mo, ang electromagnetic moment ng DC machine ay proporsyonal sa magnetic flux ng mga pole at ang armature current.

Ang armature EMF formula Ea na nakuha sa itaas ay nagbibigay ng ilang average na halaga ng EMF. Sa katunayan, ang halaga nito ay nagbabago (pulso) sa pagitan ng dalawang naglilimitang halaga - E min at E max. Kapag umiikot ang armature, ang bahagi ng mga pagliko, na pinaikli ng mga brush, ay pinapatay mula sa magkatulad na mga sanga, at sa oras na ang armature ay pinaikot sa isang anggulo na tumutugma sa isang collector plate, ang kabuuan ng mga agarang halaga ng EMF may oras para magbago. Ang maximum na halaga ng mga nagresultang EMF pulsations E = 0.5 (E max -E min) ay depende sa bilang ng mga plate ng kolektor. Halimbawa, sa pagtaas ng bilang na ito mula 8 hanggang 40, bumababa ang halaga ng E mula 4V hanggang 0.16V.
4. Armature reaksyon sa DC machine.
Kapag ang isang DC machine ay idling, ang magnetic field ay nilikha lamang ng mga paikot-ikot na poste. Ang hitsura ng kasalukuyang sa mga konduktor ng armature sa ilalim ng pagkarga ay sinamahan ng hitsura ng isang magnetic field ng armature. Dahil ang direksyon ng mga alon sa mga konduktor sa pagitan ng mga brush ay hindi nagbabago, ang patlang ng umiikot na armature ay naayos na may kaugnayan sa mga brush at mga poste ng paggulo.
Ang armature winding ay nagiging kahalintulad sa isang solenoid na ang axis ay tumutugma sa linya ng mga brush, samakatuwid, kapag ang mga brush ay naka-install sa geometric neutrals, ang armature flow ay nakahalang sa daloy ng paggulo, at ang epekto nito sa huli ay tinatawag na transverse armature reaction. . Ang pagkakaroon ng pagbuo ng vector ng nagresultang daloy, nakikita natin na ito ngayon ay umiikot tungkol sa geometric axis ng mga pangunahing pole. Ang larangan ng makina ay nagiging asymmetrical, ang mga pisikal na neutral ay umiikot na may kaugnayan sa mga geometriko. Sa generator, sila ay inilipat sa direksyon ng pag-ikot ng armature, sa engine - laban sa direksyon ng pag-ikot ng armature.
Sa ilalim ng pisikal na neutral mauunawaan natin ang linya na dumadaan sa gitna ng armature at ang conductor ng armature winding, kung saan ang EMF na sapilitan ng nagresultang magnetic flux ay zero. Ang pag-ilid na reaksyon ng armature ay may maliit na epekto sa pagganap ng makina, ang epekto na ito ay karaniwang hindi isinasaalang-alang. Gayunpaman, kapag ang mga brush ay inilipat mula sa geometric neutral, lumilitaw ang isang longitudinal component sa armature flux, ang epekto nito sa pole flux ay tinatawag na longitudinal armature reaction. Maaari itong maging parehong magnetizing at demagnetizing sa kalikasan. Sa pangkalahatan, ang reaksyon ng armature ay humahantong sa isang pagbaluktot ng patlang sa ilalim ng mga pole at isang pagbabago sa pagkilos ng bagay ng mga pole. Ang una ay maaaring maging sanhi ng isang makabuluhang pagtaas sa sparking sa ilalim ng mga brush (hanggang sa hitsura ng isang all-round na apoy sa kolektor), at ang huli sa generator ay nagbabago ng boltahe sa mga terminal, at sa engine ang metalikang kuwintas at bilis ng armature. .
Upang pahinain ang reaksyon ng armature, ang air gap sa pagitan ng stator at ang armature ay nadagdagan, ang mga espesyal na short-circuited na pagliko ay ginagamit sa mga grooves ng mga piraso ng poste. Sa mga makina na may mataas na kapangyarihan, isang espesyal na compensation winding ang ginagamit para sa layuning ito. Ito ay umaangkop sa mga grooves ng mga piraso ng poste, at konektado sa serye sa armature circuit, ang daloy nito ay nagbabalanse sa longitudinal na daloy ng armature.
Pinapayuhan ka naming basahin
 Therapeutic effect Para saan ang bitamina e?
Therapeutic effect Para saan ang bitamina e? - mga tagubilin para sa paggamit Dexalgin kung paano kumuha") Dexalgin (mga ampoules na may dexketoprofen) - mga tagubilin para sa paggamit Dexalgin kung paano kumuha
Dexalgin (mga ampoules na may dexketoprofen) - mga tagubilin para sa paggamit Dexalgin kung paano kumuha Diclak solution - mga tagubilin para sa paggamit Diclofenac injections mga tagubilin para sa paggamit para sa mga bata
Diclak solution - mga tagubilin para sa paggamit Diclofenac injections mga tagubilin para sa paggamit para sa mga bata Pagpapakahulugan sa Pangarap: bakit nangangarap ng Apoy, upang makita ang Apoy sa isang panaginip, na nangangahulugang Bakit nangangarap ng apoy sa isang salamin
Pagpapakahulugan sa Pangarap: bakit nangangarap ng Apoy, upang makita ang Apoy sa isang panaginip, na nangangahulugang Bakit nangangarap ng apoy sa isang salamin

