En cuanto a esquemas simple convertidores de pulso Voltaje constante.
Las principales ventajas de los convertidores de pulso:
En primer lugar, tienen una alta eficiencia y, en segundo lugar, pueden operar a un voltaje de entrada más bajo que el de salida.
Los convertidores de pulso se dividen en grupos:
- - reductor, elevador, inversor;
- - estabilizado, no estabilizado;
- – aislado galvánicamente, no aislado;
- – con un rango estrecho y amplio de voltajes de entrada.
Para la fabricación de convertidores de pulso caseros, es mejor utilizar circuitos integrados especializados: son más fáciles de ensamblar y no caprichosos al configurarlos.
Convertidor de transistor no estabilizado
Este convertidor opera a una frecuencia de 50 kHz, el aislamiento galvánico es proporcionado por un transformador T1, que está enrollado en un anillo K10x6x4.5 hecho de ferrita de 2000NM y contiene: devanado primario - 2x10 vueltas, devanado secundario - 2x70 vueltas de PEV-0.2 cable. Los transistores se pueden reemplazar con KT501B. La corriente de la batería, en ausencia de carga, prácticamente no se consume.

Convertidor de voltaje de transistor estabilizado
El transformador T1 está enrollado en un anillo de ferrita con un diámetro de 7 mm y contiene dos bobinados de 25 vueltas de alambre PEV = 0,3.
Convertidor de voltaje no estabilizado basado en un multivibrador
Convertidor no estabilizado push-pull basado en un multivibrador (VT1 y VT2) y un amplificador de potencia (VT3 y VT4). El voltaje de salida se selecciona por el número de vueltas del devanado secundario del transformador de pulso T1.
Convertidor en un chip especializado MAX631
Un convertidor de tipo estabilizador basado en un chip MAX631 de MAXIM. La frecuencia de generación es de 40 ... 50 kHz, el elemento de almacenamiento es el estrangulador L1.
Multiplicador de voltaje de dos etapas no regulado en el MAX660
Puede usar uno de los dos chips por separado, por ejemplo el segundo, para multiplicar el voltaje de dos baterías.
Regulador de impulso de conmutación en el chip MAX1674
Un circuito típico para encender un estabilizador de refuerzo de conmutación en un chip MAX1674 de MAXIM. La operación se mantiene a un voltaje de entrada de 1,1 voltios. Eficiencia - 94%, corriente de carga - hasta 200 mA.
MCP1252-33X50: dos voltajes de una fuente de alimentación
Permite recibir dos voltajes estabilizados diferentes con una eficiencia del 50...60% y una corriente de carga de hasta 150 mA en cada canal. Los condensadores C2 y C3 son dispositivos de almacenamiento de energía.
Estabilizador elevador de conmutación en el chip MAX1724EZK33 de MAXIM
Un circuito típico para encender un microcircuito especializado de MAXIM. Permanece operativo con un voltaje de entrada de 0,91 voltios, tiene un paquete SMD de tamaño pequeño y proporciona una corriente de carga de hasta 150 mA con una eficiencia del 90%.
Regulador reductor de conmutación en el chip TL497
Un circuito típico para encender un regulador reductor de conmutación en un chip TEXAS ampliamente disponible. La resistencia R3 regula el voltaje de salida dentro de + 2.8 ... + 5 voltios. La resistencia R1 establece la corriente cortocircuito, que se calcula mediante la fórmula: Ikz (A) \u003d 0.5 / R1 (Ohm)

Inversor de voltaje integrado en el chip ICL7660
Inversor de voltaje integral, eficiencia - 98%.
Dos convertidores aislados basados en chips DC-102 y DC-203
Dos convertidores de tensión aislados DA1 y DA2, conectados según un circuito “no aislado” con una “tierra” común.

Convertidor de voltaje bipolar estabilizado
Inductancia devanado primario transformador T1 - 22 μH, la relación de vueltas del devanado primario a cada secundario - 1: 2.5.
Convertidor elevador estabilizado MAX734
Un esquema típico de un convertidor elevador estabilizado en un chip MAXIM.
Aplicación no estándar del chip MAX232
Este chip suele servir como controlador RS-232. La multiplicación de voltaje se obtiene con un factor de 1.6 ... 1.8.
mercado chino de legumbres Convertidores CC-CC bastante amplia. Y deambulando por las extensiones del conocido AliExpress, me encontré con un convertidor pequeño, barato, pero al mismo tiempo bastante potente. Debe decirse de inmediato que para fines de comunicación, como cualquier convertidor de pulso, es limitado, pero sin embargo merece mucha atención debido a su tamaño.
Anteriormente, ya escribí sobre varios convertidores de pulso que puede usar para sus proyectos.
Pero todos tienen dimensiones relativamente grandes y no siempre son cómodos de usar. El héroe de esta revisión es mucho más compacto, pero al mismo tiempo proporciona parámetros de rendimiento similares. La placa del convertidor se suministra embalada en una bolsa antiestática.

En apariencia, el bebé se ve muy frívolo, sin embargo, no se apresure a sacar conclusiones.

Las dimensiones del tablero son 22 x 17 mm. En comparación con una moneda de 10 rublos.
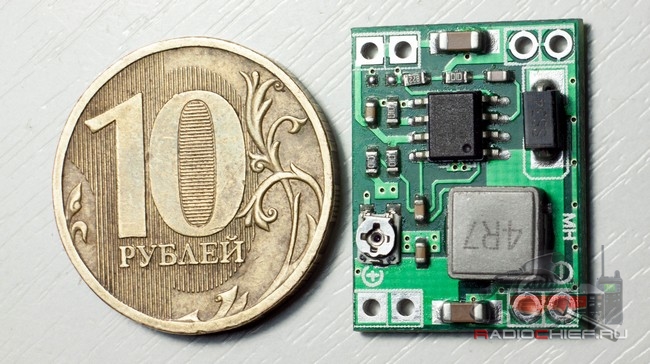
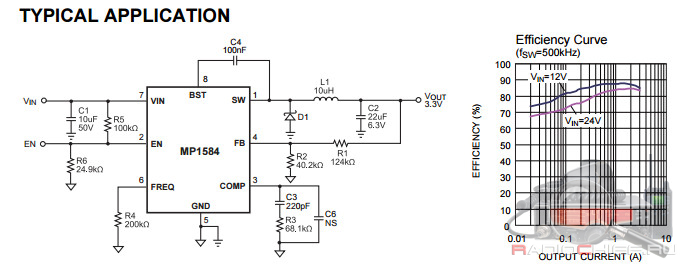
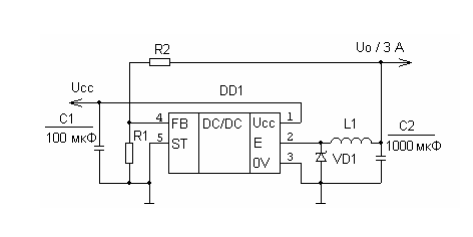
El convertidor está construido sobre la base de un chip convertidor especializado MP1584, cuyas características principales son:
- El voltaje de entrada puede variar de 4,5 a 28 voltios.
- El voltaje de salida es ajustable de 0,8 a 25 voltios.
- El FET integrado proporciona una corriente de funcionamiento de hasta 3A
- La frecuencia de funcionamiento es de hasta 1,5 MHz (esto explica las dimensiones tan pequeñas).
- Protección contra sobrecalentamiento incorporada (al llegar a 120 grados centígrados, el convertidor se apaga)
- Nivel de ondulación suficientemente bajo en la entrada y salida del convertidor.
- Protección de cortocircuito de salida.
De las deficiencias, se puede notar la falta total de protección contra la inversión de polaridad. Y si sin darse cuenta mezcló la polaridad, el chip MP1584 explotará con fuerza (uno de los convertidores murió en nombre de la ciencia). 🙂

Diagrama de cableado MP1584 de la hoja de datos. En realidad, según él, nuestro convertidor está ensamblado. También hay un gráfico de eficiencia en función de la corriente consumida.
Pruebas
Para probar el convertidor, le conectamos la estación de radio M-Tech Legend III,

El convertidor en sí está alimentado por una fuente de alimentación de laboratorio Atten PPS3005S capaz de entregar voltajes de hasta 31 voltios y corriente de hasta 5A. Mediremos la corriente y el voltaje usando un multímetro Vichy VC8145.
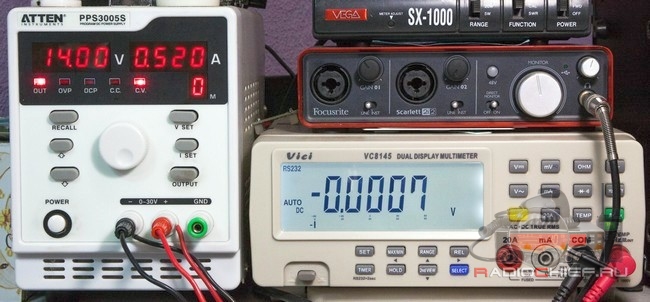
Tomaremos los parámetros antes y después del convertidor.
La eficiencia del convertidor en términos de potencia es de alrededor del 90%, lo cual está bien. 10% de pérdida es un valor bastante aceptable. También debe recordar que la eficiencia cae bruscamente cuando la tensión de entrada y salida es inferior a 3 V (en la documentación, inferior a 5). Entonces la eficiencia de nuestro bebé es incluso mayor que la de los hermanos mayores.
Midamos el nivel de ondulación en la entrada y salida del convertidor bajo una carga estándar en forma de una estación de radio M-Tech Legend III. Investigaremos la señal en la entrada y en la salida utilizando un osciloscopio Atten ADS1102CAL. El principal parámetro en estudio es dV (amplitud de pulsación entre los cursores CurA y CurB).
Ondulación en la entrada (recepción)
Ondulación de salida (recepción)
Ondulación de entrada (transmisión)
Ondulación de salida (transmisión)
En comparación con convertidores de baja frecuencia similares, pero más, se ve bastante bien.
Régimen de temperatura
Examinamos el convertidor en busca de calentamiento durante el funcionamiento.
Modo de espera, consumo de corriente 294mA

Después de 1 minuto de transmisión, el consumo de corriente es de 1,55 A.
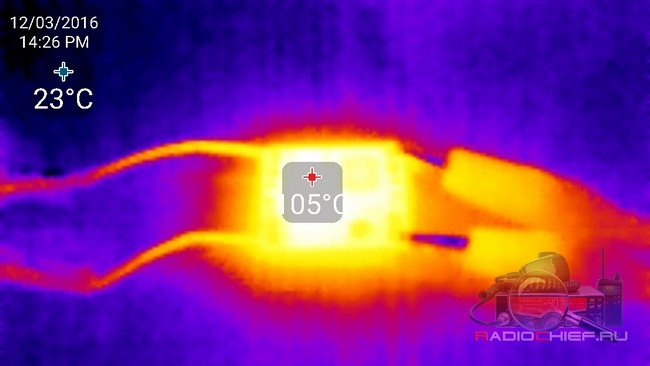
Como puede ver, el chip convertidor en sí es el que más se ha calentado. Por supuesto, nuestro bebé lo pasa mal, pero en general, pasó la prueba.
Interferencia
La documentación del MP1584 dice: Al cambiar a 1,5 MHz, el MP1584 puede evitar problemas de ruido EMI (interferencia electromagnética), como los que se encuentran en las aplicaciones de radio AM y ADSL. Lo que significa traducido: dado que la conversión se produce a una frecuencia de 1,5 MHz, el MP1584 no debería generar ruido electromagnético que cause problemas cuando los transceptores utilizan modulación de amplitud y tecnología ADSL. En mi experiencia, la radio M-Tech Legend III, cuando se conectó a través de este convertidor, no mostró ninguna disminución notable en la sensibilidad. Y, sin embargo, teniendo en cuenta los principios de funcionamiento de los convertidores de pulso, no recomendaría usarlo para alimentar equipos de comunicación sensibles. El tamaño compacto del transductor permite colocarlo incluso dentro de la estación, pero no se sabe cuánto afectará negativamente esto a la sensibilidad del receptor; se deben realizar estudios adicionales para verificar este punto.
Salir
Como resultado, tenemos un excelente convertidor en miniatura que se puede usar fácilmente para alimentar varios dispositivos, por ejemplo, para construir un banco de energía con una batería de plomo que cargará sus dispositivos móviles. Recientemente, tuve una tarea similar, alimentar el equipo para disparar en el campo, para no depender mucho de las baterías integradas en el equipo, y los convertidores en el chip MP1584 hicieron un excelente trabajo con esta tarea .
K1224PN1x: un circuito integrado es un convertidor de CC bajo a CA alto y se utiliza para controlar un plano lámpara fluorescente. El aumento de voltaje se lleva a cabo utilizando una inductancia externa, en la que se generan pulsos de voltaje de alto voltaje a la frecuencia del generador de bomba interno. La fase del voltaje de salida es controlada por el generador de conmutación de fase. La frecuencia de cada generador está determinada por la capacitancia externa. El IC contiene: dos auto-osciladores que forman la frecuencia de bombeo y el período de conmutación […]
El chip 1156EU1 es un conjunto de elementos funcionales diseñados para construir un regulador de conmutación de tipo elevador, reductor o inverso. El dispositivo K1156EU1T se produce en una caja de cerámica y metal tipo 4112.16-3, y KR1156EU1, en una caja de plástico tipo 283.16-2. CARACTERÍSTICAS Diseñado para buck, boost e invertir reguladores de conmutación Ajuste de voltaje de salida 1.25…40V Salida corriente de impulso………..<1,5А Входное напряжение ….2,5…40В […]
K1290EKxx, K1290EF1xx es un regulador de voltaje de conmutación reductor para una carga de hasta 3 A, diseñado para operar en el rango de temperatura de la caja de menos 10 ... + 85 ° C (K1290ExxP) y menos 60 ... + 125 ° C (K1290ExxX). Tensión de salida fija: 3,3 V - K1290EK3.3 (A, B) P, K1290EK3.3X, 5 V - K1290EK5 (A, B) P, K1290EK5X, 12 V - K1290EK12 (A, B) P, 15 V - K1290EK15( A,B) CARACTERÍSTICAS Tensión de salida programable de 1,2 V a […]
El UA78S40 de Motorola y el LM78S40 de National Semionductor son circuitos integrados para convertidores de conmutación de propósito general. El microcircuito UA78S40 (LM78S40) le permite crear convertidores estabilizados por impulsos reductores, elevadores y de polaridad inversa. El convertidor del chip UA78S40 tiene un amplio rango de voltaje de entrada y salida. El voltaje de entrada puede variar de 2,5 a 40 V, el voltaje de salida de 1,5 a 40 V. Diodo Schottky 1N5822 en […]
El regulador de voltaje de conmutación ajustable LM2576HV-ADJ (regulador de voltaje ajustable de ancho de pulso de purga (PWM)) tiene un amplio rango de voltaje de salida ajustable de 1,2 a 50 V con una corriente de salida máxima de 3 A. Dado que el estabilizador funciona en modo pulsado, tiene una alta eficiencia y generalmente está equipado con un pequeño radiador con un área de no más de 100 cm2. El dispositivo tiene protección térmica y […]
La figura muestra un diagrama de un convertidor de voltaje simple. El IC CD4047 opera en modo multivibrador inestable, desde cuya salida, en antifase, la señal va a los transistores MOSFET IRFZ44, cuya carga es normal (un transformador de red con devanados conectados al revés, donde el devanado 220 se vuelve secundario) Transformador elevador de 60-100 W con devanado primario 2 * 12V y un grifo desde el medio.
IC CAT3603 proporciona 30 mA por canal y funciona con un voltaje de entrada de 3 ... 5,5 V. El consumo de corriente en reposo del microcircuito es extremadamente pequeño, 0,1 mA, lo que permite alimentarlo con una batería convencional. Frecuencia de conversión operativa 1MHz, eficiencia del convertidor 90%. Hay una protección de la salida contra el cortocircuito. La corriente de salida del microcircuito se regula mediante la resistencia R. La tabla muestra los valores de resistencia en función de […]

Convertidores de frecuencia
Desde finales de la década de 1960, los convertidores de frecuencia han cambiado drásticamente, principalmente como resultado del desarrollo de tecnologías de microprocesadores y semiconductores, así como también debido a la reducción de su costo.
Sin embargo, los principios fundamentales que subyacen a los convertidores de frecuencia siguen siendo los mismos.
La estructura de los convertidores de frecuencia incluye cuatro elementos principales:
Arroz. 1. Diagrama de bloques del convertidor de frecuencia
1. El rectificador genera un voltaje de CC pulsante cuando se conecta a una fuente de alimentación de CA monofásica o trifásica. Los rectificadores vienen en dos tipos principales: administrados y no administrados.
2. Cadena intermedia de uno de tres tipos:
a) convertir la tensión del rectificador en corriente continua.
b) estabilizar o suavizar el voltaje de CC ondulado y suministrarlo al inversor.
c) convertir el voltaje de CC constante del rectificador en un voltaje de CA variable.
3. Inversor, que forma la frecuencia de la tensión del motor eléctrico. Algunos inversores también pueden convertir un voltaje de CC fijo en un voltaje de CA variable.
4. Un circuito de control electrónico que envía señales al rectificador, circuito intermedio e inversor y recibe señales de estos elementos. La construcción de elementos controlados depende del diseño de un convertidor de frecuencia en particular (ver Fig. 2.02).
Todos los convertidores de frecuencia tienen en común que todos los circuitos de control controlan los elementos semiconductores del inversor. Los convertidores de frecuencia difieren en el modo de conmutación utilizado para regular la tensión de alimentación del motor.
En la fig. 2, que muestra los diversos principios de construcción/control del convertidor, se utiliza la siguiente notación:
1 - rectificador controlado,
2- rectificador no controlado,
3- circuito intermedio de la corriente continua cambiante,
4- Circuito intermedio de tensión constante DC
5- circuito intermedio de la corriente continua cambiante,
6- inversor con modulación de pulso de amplitud (AIM)
7- inversor con modulación de ancho de pulso (PWM)
Inversor de corriente (IT) (1+3+6)
Convertidor con modulación de pulsos de amplitud (AIM) (1+4+7) (2+5+7)
Convertidor PWM (PWM/VVCplus) (2+4+7)

Arroz. 2. Varios principios de construcción/control de convertidores de frecuencia
Para completar, se deben mencionar los convertidores directos, que no tienen un circuito intermedio. Dichos convertidores se utilizan en el rango de potencia de los megavatios para formar una tensión de alimentación de baja frecuencia directamente desde la red de 50 Hz, mientras que su frecuencia de salida máxima es de unos 30 Hz.
Rectificador
La tensión de alimentación de la red es una tensión alterna trifásica o monofásica de frecuencia fija (por ejemplo, 3x400V/50Hz o 1x240V/50Hz); las características de estos voltajes se ilustran en la siguiente figura.
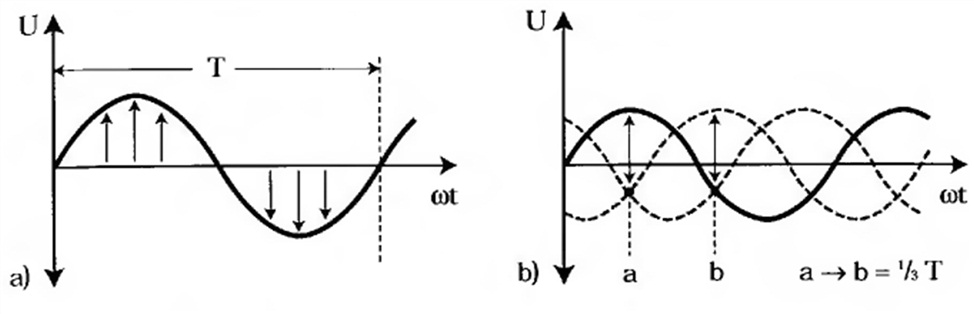
Arroz. 3. Voltaje CA monofásico y trifásico
En la figura, las tres fases se desplazan entre sí en el tiempo, el voltaje de fase cambia constantemente de dirección y la frecuencia indica la cantidad de períodos por segundo. Una frecuencia de 50 Hz significa que hay 50 periodos por segundo (50 x T), es decir un período dura 20 milisegundos.
El rectificador del convertidor de frecuencia se construye con diodos, tiristores o una combinación de ellos. Un rectificador construido sobre diodos no está controlado y sobre tiristores está controlado. Si se utilizan tanto diodos como tiristores, el rectificador está semicontrolado.
Rectificadores no controlados
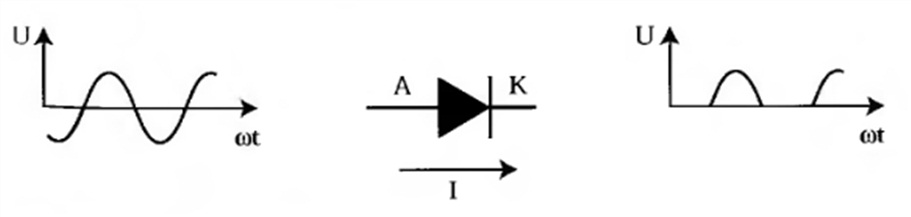
Arroz. 4. Modo de operación de diodo.
Los diodos permiten que la corriente fluya en una sola dirección: del ánodo (A) al cátodo (K). Al igual que con algunos otros dispositivos semiconductores, la cantidad de corriente de diodo no se puede controlar. El voltaje de CA es convertido por el diodo en un voltaje de CC pulsante. Si un rectificador trifásico no controlado se alimenta con un voltaje de CA trifásico, entonces el voltaje de CC también pulsará en este caso.

Arroz. 5. Rectificador no controlado
En la fig. 5 muestra un rectificador trifásico no controlado que contiene dos grupos de diodos. Un grupo consta de diodos D1, D3 y D5. Otro grupo consta de diodos D2, D4 y D6. Cada diodo conduce corriente durante un tercio del tiempo de ciclo (120°). En ambos grupos, los diodos conducen la corriente en una determinada secuencia. Los periodos en los que trabajan ambos grupos se desplazan entre sí 1/6 del tiempo del periodo T (60°).
Los diodos D1,3,5 están abiertos (conductivos) cuando se les aplica un voltaje positivo. Si el voltaje de la fase L alcanza un valor pico positivo, entonces el diodo D está abierto y la terminal A recibe el voltaje de la fase L1 Los otros dos diodos se verán afectados por los voltajes inversos de U L1-2 y U L1-3
Lo mismo sucede en el grupo de diodos D2,4,6. En este caso, el terminal B recibe una tensión de fase negativa. Si en ese momento la fase L3 alcanza el valor límite negativo, el diodo D6 está abierto (conduce). Los otros dos diodos se ven afectados por los voltajes inversos de U L3-1 y U L3-2
El voltaje de salida de un rectificador no controlado es igual a la diferencia de voltaje entre estos dos grupos de diodos. El valor medio de la tensión continua de ondulación es 1,35 x la tensión de red.
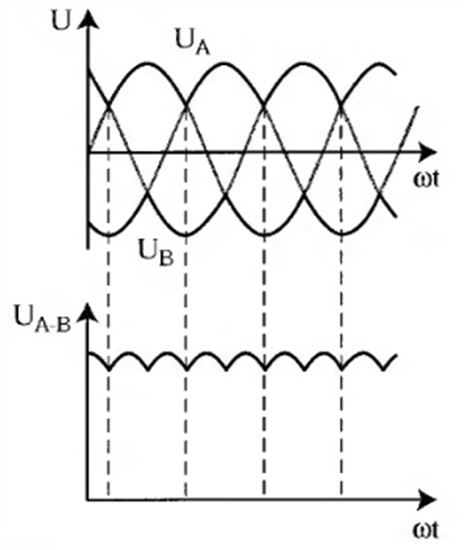
Arroz. 6. Voltaje de salida del rectificador trifásico no controlado
Rectificadores controlados
En los rectificadores controlados, los diodos se reemplazan por tiristores. Al igual que un diodo, un tiristor pasa corriente en una sola dirección: desde el ánodo (A) hasta el cátodo (K). Sin embargo, a diferencia del diodo, el tiristor tiene un tercer electrodo llamado "puerta" (G). Para que el tiristor se abra, se debe aplicar una señal a la puerta. Si la corriente fluye a través del tiristor, el tiristor lo pasará hasta que la corriente sea cero.
La corriente no se puede interrumpir aplicando una señal a la puerta. Los tiristores se utilizan tanto en rectificadores como en inversores.
Se aplica una señal de control a a la puerta del tiristor, que se caracteriza por un retardo expresado en grados. Estos grados provocan un retraso entre el momento en que el voltaje pasa por cero y el momento en que el tiristor está abierto.

Arroz. 7. Modo de operación de tiristor
Si el ángulo a está en el rango de 0° a 90°, entonces el circuito del tiristor se usa como rectificador, y si está en el rango de 90° a 300°, entonces como inversor.
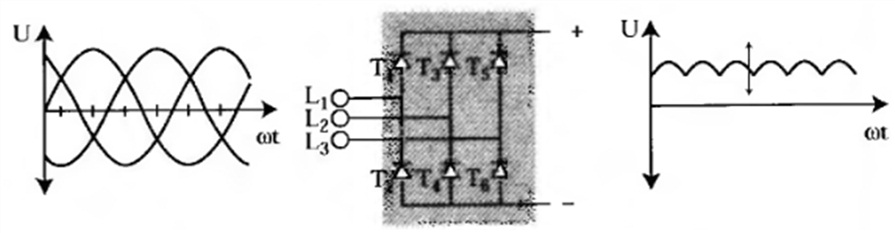
Arroz. 8. Rectificador trifásico controlado
Un rectificador controlado es fundamentalmente lo mismo que uno no controlado, excepto que el tiristor es controlado por la señal y comienza a conducir desde el momento en que un diodo convencional comienza a conducir, hasta un momento que está 30° después del punto de cruce por cero de la tensión. .
Ajustar el valor de a le permite cambiar la magnitud del voltaje rectificado. El rectificador controlado genera una tensión constante cuyo valor medio es 1,35 x tensión de red x cos α
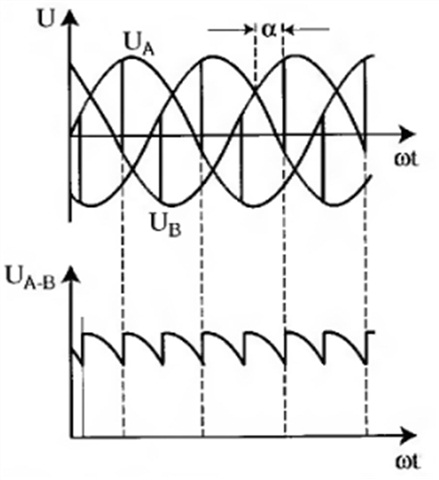
Arroz. 9. Tensión de salida del rectificador trifásico controlado
Comparado con un rectificador no controlado, un rectificador controlado tiene pérdidas más significativas e introduce mayor ruido en la red de alimentación, ya que con un tiempo de paso de tiristor más corto, el rectificador extrae más corriente reactiva de la red.
La ventaja de los rectificadores controlados es su capacidad de devolver energía a la red de suministro.
cadena intermedia
El circuito intermedio se puede considerar como un almacenamiento del cual el motor eléctrico puede recibir energía a través del inversor. Según el rectificador y el inversor, existen tres posibles principios de diseño de circuitos intermedios.
Inversores - fuentes de corriente (1-convertidores)
Arroz. 10. Circuito intermedio de corriente continua variable
En el caso de los inversores - fuentes de corriente, el circuito intermedio contiene una gran bobina de inductancia y se acopla solo con un rectificador controlado. El inductor convierte el voltaje cambiante del rectificador en una corriente continua cambiante. La tensión del motor está determinada por la carga.
Inversores - fuentes de tensión (convertidores U)

Arroz. 11. Circuito intermedio de tensión continua
En el caso de los inversores de fuente de voltaje, el circuito intermedio es un filtro que contiene un capacitor y puede acoplarse con cualquiera de los dos tipos de rectificador. El filtro suaviza el voltaje de CC pulsante (U21) del rectificador.
En un rectificador controlado, el voltaje a una frecuencia dada es constante y se suministra al inversor como un voltaje constante real (U22) con amplitud variable.
En los rectificadores no controlados, el voltaje en la entrada del inversor es un voltaje constante con una amplitud constante.
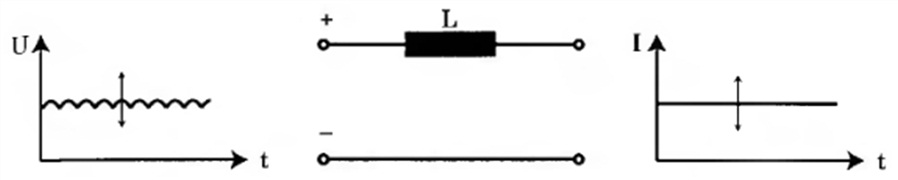
Circuito intermedio de tensión DC variable
Arroz. 12. Circuito intermedio de tensión variable
En circuitos intermedios de tensión continua variable, es posible encender un interruptor frente al filtro, como se muestra en la fig. 12
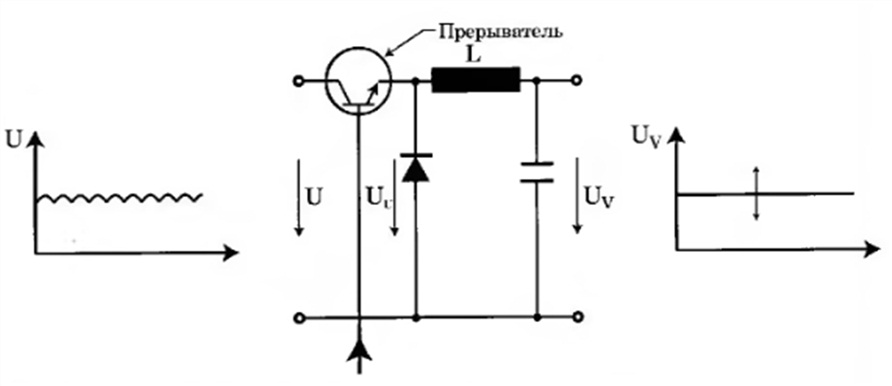
El interruptor contiene un transistor que actúa como interruptor, activando y desactivando el voltaje del rectificador. El sistema de control controla el helicóptero comparando el cambio de voltaje después del filtro (U v) con la señal de entrada. Si hay una diferencia, la relación se ajusta cambiando el tiempo que el transistor está encendido y el tiempo que está apagado. Esto cambia el valor efectivo y la magnitud del voltaje constante, que se puede expresar mediante la fórmula
U v \u003d U x t encendido / (t encendido + t apagado)
Cuando el transistor interruptor abre el circuito de corriente, el inductor de filtro hace que el voltaje a través del transistor sea infinitamente grande. Para evitar esto, el interruptor está protegido por un diodo de conmutación rápida. Cuando el transistor se abre y se cierra, como se muestra en la Fig. 13, el voltaje será el más alto en el modo 2.
Arroz. 13. El disyuntor de transistores controla la tensión del circuito intermedio
El filtro del circuito intermedio suaviza la onda cuadrada después del interruptor. El condensador de filtro y el inductor mantienen el voltaje constante a una frecuencia dada.
Dependiendo de la construcción, el circuito intermedio también puede realizar funciones adicionales, que incluyen:
Desacoplamiento del rectificador del inversor
Reducir el nivel de armónicos
Almacenamiento de energía para limitar picos de carga intermitentes.
inversor
El inversor es el último eslabón del convertidor de frecuencia antes del motor eléctrico y el lugar donde tiene lugar la adaptación final de la tensión de salida.
El convertidor de frecuencia proporciona condiciones de funcionamiento normales en todo el rango de control adaptando la tensión de salida al modo de carga. Esto le permite mantener una magnetización óptima del motor.
Del circuito intermedio, el inversor recibe
corriente continua variable,
Voltaje de CC variable o
Voltaje de CC constante.
Gracias al inversor, en cada uno de estos casos, se suministra un valor variable al motor eléctrico. En otras palabras, la frecuencia deseada del voltaje suministrado al motor eléctrico siempre se crea en el inversor. Si la corriente o el voltaje es variable, el inversor solo genera la frecuencia deseada. Si el voltaje es constante, el inversor crea tanto la frecuencia deseada como el voltaje deseado para el motor.
Incluso si los inversores funcionan de manera diferente, su estructura básica es siempre la misma. Los elementos principales de los inversores son dispositivos semiconductores controlados conectados en pares en tres ramas.
En la actualidad, los tiristores han sido reemplazados en la mayoría de los casos por transistores de alta frecuencia, que pueden abrirse y cerrarse muy rápidamente. La frecuencia de conmutación suele estar entre 300 Hz y 20 kHz, dependiendo de los semiconductores utilizados.
Los dispositivos semiconductores del inversor se encienden y apagan mediante señales generadas por el circuito de control. Las señales se pueden generar de varias maneras diferentes.
Arroz. 14. Inversor de corriente de circuito intermedio convencional con tensión variable.
Los inversores convencionales, que principalmente conmutan la corriente del circuito intermedio de la tensión cambiante, contienen seis tiristores y seis condensadores.
Los condensadores permiten que los tiristores se abran y cierren de tal manera que la corriente en los devanados de fase se desplace 120 grados y deba adaptarse al tamaño del motor. Cuando se aplica corriente periódicamente a los terminales del motor en la secuencia U-V, V-W, W-U, U-V..., se genera un campo magnético giratorio intermitente de la frecuencia requerida. Incluso si la corriente del motor es casi de onda cuadrada, el voltaje del motor será casi sinusoidal. Sin embargo, cuando se activa o desactiva la corriente, siempre se producen picos de tensión.
Los condensadores están separados de la corriente de carga del motor por diodos.
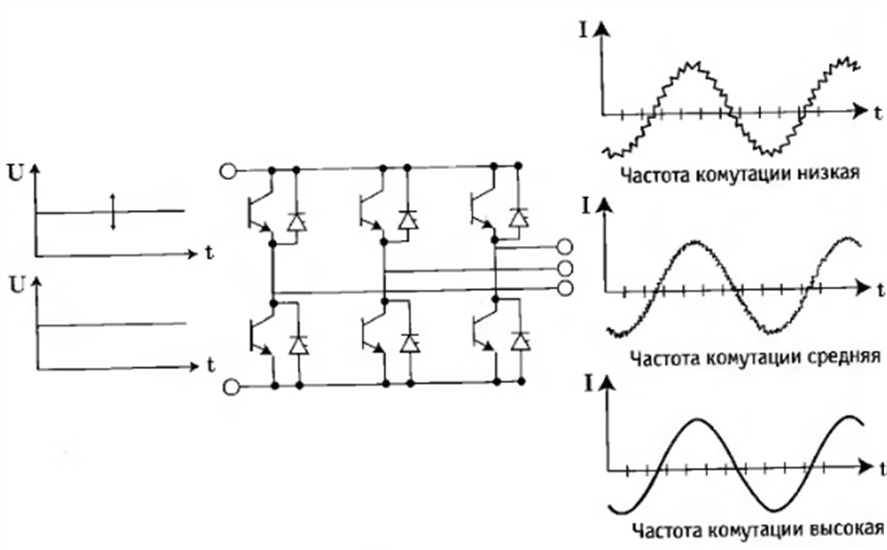
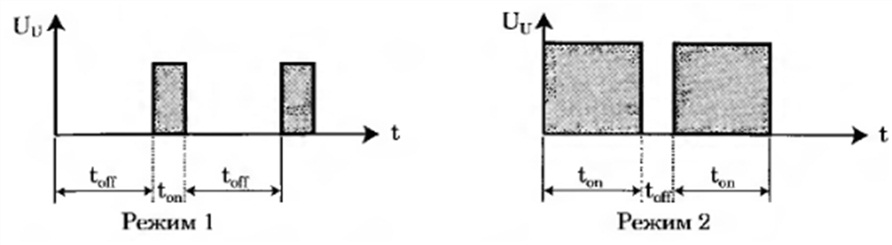
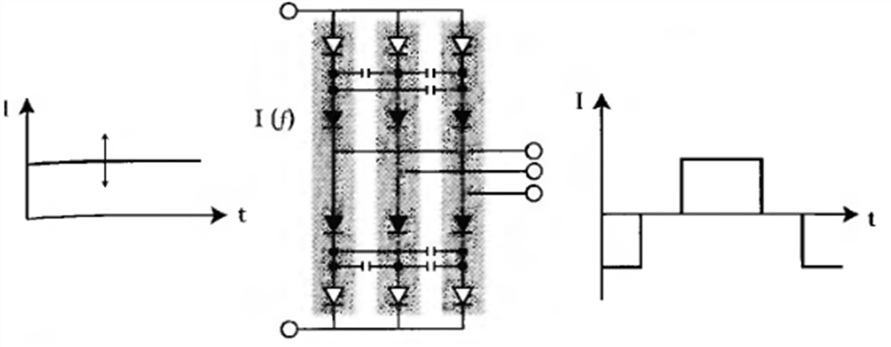
Arroz. 15. Inversor para cambiar o constante la tensión del circuito intermedio y la dependencia de la corriente de salida de la frecuencia de conmutación del inversor
Los inversores con un voltaje de circuito intermedio variable o constante contienen seis elementos de conmutación e, independientemente del tipo de dispositivos semiconductores utilizados, funcionan casi de la misma manera. El circuito de control abre y cierra los dispositivos semiconductores utilizando varios métodos de modulación diferentes, cambiando así la frecuencia de salida del convertidor de frecuencia.
El primer método es para cambiar el voltaje o la corriente en el circuito intermedio.
Los intervalos durante los cuales los semiconductores individuales están abiertos se organizan en una secuencia utilizada para obtener la frecuencia de salida deseada.
Esta secuencia de conmutación de dispositivos semiconductores está controlada por la magnitud del cambio de voltaje o corriente del circuito intermedio. Mediante el uso de un oscilador controlado por voltaje, la frecuencia siempre sigue la amplitud del voltaje. Este tipo de control de inversor se llama modulación de amplitud de pulso (PAM).
Para una tensión de circuito intermedio fija, se utiliza otro método básico. El voltaje del motor se vuelve variable al aplicar el voltaje del circuito intermedio a los devanados del motor durante períodos de tiempo más largos o más cortos.
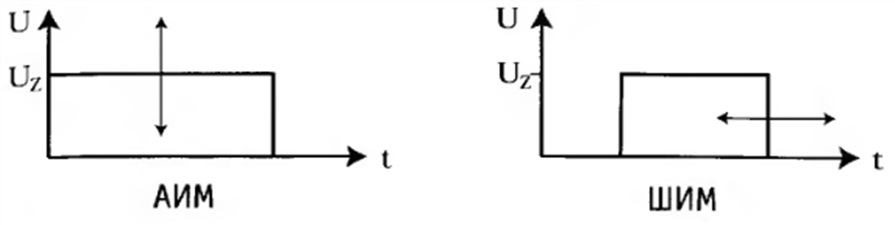
Arroz. 16 Modulación de amplitud y ancho de pulso
La frecuencia se cambia modificando los pulsos de voltaje a lo largo del eje del tiempo: positivamente durante un semiciclo y negativamente durante el otro.
Dado que este método cambia la duración (ancho) de los pulsos de voltaje, se llama modulación de ancho de pulso (PWM). La modulación PWM (y los métodos relacionados, como PWM controlado por seno) es la forma más común de controlar un inversor.
Con la modulación PWM, el circuito de control determina los tiempos de conmutación de los dispositivos semiconductores en la intersección del voltaje de diente de sierra y el voltaje de referencia sinusoidal superpuesto (PWM controlado sinusoidalmente). Otros métodos de modulación PWM prometedores son los métodos de modulación de ancho de pulso modificado, como WC y WC plus, desarrollados por Danfoss Corporation.
transistores
Dado que los transistores pueden cambiar a altas velocidades, se reduce la interferencia electromagnética que se produce cuando "pulsa" (magnetización del motor).
Otro beneficio de la alta frecuencia de conmutación es la flexibilidad de modular el voltaje de salida del convertidor de frecuencia, lo que permite que se produzca una corriente de motor sinusoidal, mientras que el circuito de control solo necesita abrir y cerrar los transistores del inversor.
La frecuencia de conmutación del inversor es un arma de doble filo, ya que las altas frecuencias pueden provocar un calentamiento del motor y picos de tensión elevados. Cuanto mayor sea la frecuencia de conmutación, mayores serán las pérdidas.
Por otro lado, una frecuencia de conmutación baja puede resultar en un fuerte ruido acústico.
Los transistores de alta frecuencia se pueden dividir en tres grupos principales:
Transistores bipolares (LTR)
MOSFET unipolares (MOS-FET)
Transistores bipolares de puerta aislada (IGBT)
Los transistores IGBT son actualmente los más utilizados porque combinan las propiedades de conducción de los transistores MOS-FET con las propiedades de salida de los transistores LTR; además, tienen el rango de potencia adecuado, la conductividad y la frecuencia de conmutación adecuadas, lo que simplifica enormemente el control de los convertidores de frecuencia modernos.
En el caso de los IGBT, tanto los elementos del inversor como los controles del inversor se colocan en un módulo moldeado denominado "Módulo de alimentación inteligente" (IPM).
Modulación de amplitud de pulso (AIM)
La modulación de amplitud de impulsos se utiliza para convertidores de frecuencia con tensión de circuito intermedio variable.
En los convertidores de frecuencia con rectificadores no controlados, la amplitud de la tensión de salida está formada por un interruptor automático intermedio, y si el rectificador está controlado, la amplitud se obtiene directamente.
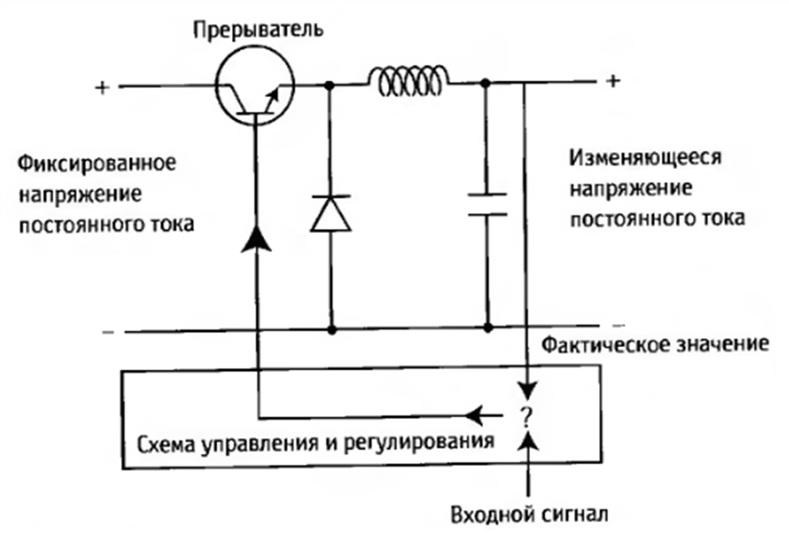
Arroz. 20. Generación de tensión en convertidores de frecuencia con disyuntor en el circuito intermedio
El transistor (disyuntor) de la fig. 20 está desbloqueado o bloqueado por el circuito de control y regulación. Los tiempos de conmutación dependen del valor nominal (señal de entrada) y de la señal de tensión medida (valor real). El valor real se mide a través del capacitor.
El inductor y el capacitor actúan como un filtro que suaviza las ondas de voltaje. El voltaje pico depende del tiempo de apertura del transistor, y si los valores nominal y real son diferentes entre sí, el interruptor funciona hasta alcanzar el nivel de voltaje requerido.
control de frecuencia
El inversor cambia la frecuencia del voltaje de salida durante el período, y los dispositivos de conmutación de semiconductores funcionan muchas veces durante el período.
La duración del período se puede ajustar de dos maneras:
1. Entrada directa o
2. Usando un voltaje de CC variable que es proporcional a la señal de entrada.

Arroz. 21a. Control de frecuencia con tensión de circuito intermedio
La modulación de ancho de pulso es la forma más común de generar un voltaje trifásico con una frecuencia adecuada.
Con modulación de ancho de pulso, la formación de la tensión total del circuito intermedio (≈ √2 x U red) está determinada por la duración y la frecuencia de conmutación de los elementos de potencia. La tasa de repetición de pulsos PWM entre encendido y apagado es variable y permite la regulación de voltaje.
Hay tres opciones principales para configurar los modos de conmutación en un inversor controlado por modulación de ancho de pulso.
1. PWM controlado sinusoidalmente
2. PWM síncrono
3. PWM asíncrono
Cada ramal de un inversor PWM trifásico puede tener dos estados diferentes (encendido y apagado).
Tres interruptores forman ocho posibles combinaciones de conmutación (2 3) y, por tanto, ocho vectores de tensión digitales en la salida del inversor o en el devanado del estator del motor conectado. Como se muestra en la fig. 21b, estos vectores 100, 110, 010, 011, 001, 101 están en las esquinas del hexágono circunscrito, usando los vectores 000 y 111 como ceros.
![]()
En el caso de las combinaciones de conmutación 000 y 111, se crea el mismo potencial en los tres terminales de salida del inversor, ya sea positivo o negativo con respecto al circuito intermedio (consulte la Fig. 21c). Para un motor eléctrico, esto significa un efecto cercano a un cortocircuito de las terminales; También se aplica un voltaje de 0 V a los devanados del motor.
PWM controlado sinusoidalmente
Con PWM controlado sinusoidalmente, se utiliza un voltaje de referencia sinusoidal (Us) para controlar cada salida del inversor.La duración del período del voltaje sinusoidal corresponde a la frecuencia fundamental requerida del voltaje de salida. Se aplica un voltaje de diente de sierra (U D) a los tres voltajes de referencia, ver fig. 22

Arroz. 22. El principio de funcionamiento de un PWM controlado sinusoidalmente (con dos voltajes de referencia)
Cuando el voltaje de diente de sierra y los voltajes de referencia sinusoidales se cruzan, los dispositivos semiconductores de los inversores se abren o cierran.
Las intersecciones están determinadas por los elementos electrónicos del tablero de control. Si el voltaje de diente de sierra es mayor que el voltaje sinusoidal, a medida que el voltaje de diente de sierra disminuye, los pulsos de salida cambian de positivo a negativo (o de negativo a positivo), de modo que el voltaje de salida del convertidor de frecuencia está determinado por el voltaje del circuito intermedio. .
El voltaje de salida varía según la relación entre la duración del estado abierto y cerrado, y esta relación se puede cambiar para obtener el voltaje requerido. Así, la amplitud de los pulsos de tensión negativos y positivos siempre corresponde a la mitad de la tensión del circuito intermedio.
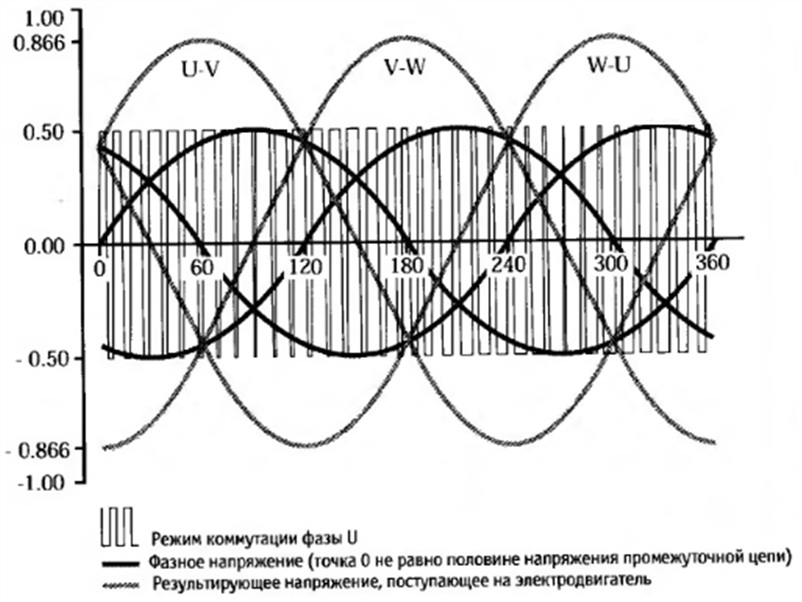
Arroz. 23. Voltaje de salida de PWM controlado sinusoidalmente
A bajas frecuencias del estator, el tiempo de inactividad aumenta y puede ser tan largo que no es posible mantener la frecuencia de la tensión de diente de sierra.
Esto aumenta el período sin voltaje y el motor funcionará de manera desigual. Para evitar esto, a bajas frecuencias, puede duplicar la frecuencia del voltaje de diente de sierra.
La tensión de fase en los terminales de salida del convertidor de frecuencia corresponde a la mitad de la tensión del circuito intermedio dividida por √2, es decir, igual a la mitad de la tensión de red. El voltaje de línea a línea en los terminales de salida es √3 veces el voltaje de línea a línea, es decir igual a la tensión de red multiplicada por 0,866.
Un inversor controlado por PWM que opera exclusivamente con un voltaje de referencia de onda senoidal modulada puede suministrar un voltaje igual al 86,6% del voltaje nominal (ver Figura 23).
Cuando se utiliza modulación sinusoidal pura, la tensión de salida del convertidor de frecuencia no puede alcanzar la tensión del motor porque la tensión de salida también será un 13 % inferior.
Sin embargo, el voltaje adicional requerido se puede obtener reduciendo el número de pulsos cuando la frecuencia excede los 45 Hz, pero este método tiene algunas desventajas. En particular, provoca un cambio de paso en el voltaje, lo que conduce a un funcionamiento inestable del motor eléctrico. Si el número de pulsos disminuye, aumentan los armónicos más altos en la salida del convertidor de frecuencia, lo que aumenta las pérdidas en el motor.
Otra forma de resolver este problema es utilizar otros voltajes de referencia en lugar de tres sinusoidales. Estas tensiones pueden tener cualquier forma (por ejemplo, trapezoidal o escalonada).
Por ejemplo, una referencia de voltaje común usa el tercer armónico de una referencia de voltaje sinusoidal. Para obtener dicho modo de conmutación de dispositivos semiconductores del inversor, que aumentará el voltaje de salida del convertidor de frecuencia, es posible aumentar la amplitud del voltaje de referencia sinusoidal en un 15,5% y agregarle un tercer armónico.
PWM síncrono
La principal dificultad en el uso del método PWM controlado por seno radica en la necesidad de determinar los valores óptimos para el tiempo de conmutación y el ángulo para el voltaje durante un período determinado. Estos tiempos de conmutación deben configurarse de tal manera que solo se permita un mínimo de armónicos más altos. Este modo de conmutación se mantiene solo para un rango de frecuencia dado (limitado). La operación fuera de este rango requiere el uso de un método de conmutación diferente.
PWM asíncrono
La necesidad de orientación de campo y capacidad de respuesta del sistema en términos de par y control de velocidad de los variadores de CA trifásicos (incluidos los servovariadores) requiere un cambio radical en la amplitud y el ángulo del voltaje del inversor. El uso del modo de conmutación PWM "normal" o síncrono no permite escalonar la amplitud y el ángulo del voltaje del inversor.
Una forma de cumplir con este requisito es PWM asíncrono, donde en lugar de sincronizar la modulación del voltaje de salida con la frecuencia de salida, como se hace generalmente para reducir los armónicos en un motor, se modula el ciclo de control de voltaje vectorial, lo que da como resultado un acoplamiento síncrono con la frecuencia de salida. .
Hay dos variantes principales de PWM asíncrono:
SFAVM (Modulación vectorial asíncrona orientada al flujo del estator = (modulación vectorial síncrona orientada al flujo del estator)
60° AVM (modulación vectorial asíncrona = modulación vectorial asíncrona).
SFAVM es un método de modulación de vector espacial que permite que el voltaje, la amplitud y el ángulo del inversor cambien aleatoriamente pero paso a paso durante el tiempo de conmutación. Esto logra mayores propiedades dinámicas.
El propósito principal de esta modulación es optimizar el flujo del estator utilizando el voltaje del estator mientras se reduce la ondulación del par, ya que la desviación del ángulo depende de la secuencia de conmutación y puede causar un aumento en la ondulación del par. Por lo tanto, la secuencia de conmutación debe calcularse de forma que se minimice la desviación del ángulo del vector. La conmutación entre vectores de tensión se basa en el cálculo de la trayectoria de flujo magnético deseada en el estator del motor, que a su vez determina el par.
La desventaja de los sistemas de energía PWM convencionales anteriores era la desviación de la amplitud del vector de flujo magnético del estator y el ángulo de flujo magnético. Estas desviaciones afectaron negativamente al campo giratorio (par) en el entrehierro del motor y provocaron ondulación del par. La influencia de la desviación de la amplitud U es insignificante y puede reducirse aún más aumentando la frecuencia de conmutación.
Generación de voltaje del motor
El funcionamiento estable corresponde a la regulación del vector de voltaje de la máquina U wt para que describa un círculo (ver Fig. 24).
El vector de voltaje se caracteriza por la magnitud del voltaje del motor eléctrico y la velocidad de rotación, que corresponde a la frecuencia de operación en el momento considerado. El voltaje del motor se forma creando valores promedio utilizando pulsos cortos de vectores vecinos.
El método SFAVM de Danfoss tiene las siguientes características, entre otras:
El vector de voltaje se puede ajustar en amplitud y fase sin desviarse del objetivo establecido.
La secuencia de conmutación siempre comienza con 000 o 111. Esto permite que el vector de voltaje tenga tres modos de conmutación.
El valor promedio del vector de voltaje se obtiene usando pulsos cortos de vectores vecinos, así como vectores cero 000 y 111.
Esquema de control
El circuito de control, o tablero de control, es el cuarto elemento principal del convertidor de frecuencia, el cual está diseñado para resolver cuatro tareas importantes:
Control de elementos semiconductores del convertidor de frecuencia.
Comunicación entre convertidores de frecuencia y dispositivos periféricos.
Recogida de datos y generación de mensajes de error.
Realizando las funciones de protección del convertidor de frecuencia y del motor eléctrico.
Los microprocesadores aumentaron la velocidad del circuito de control, ampliaron significativamente el alcance de las unidades y redujeron la cantidad de cálculos necesarios.
El microprocesador está integrado en el convertidor de frecuencia y siempre puede determinar el patrón de pulso óptimo para cada estado operativo.
Circuito de control para convertidor de frecuencia AIM
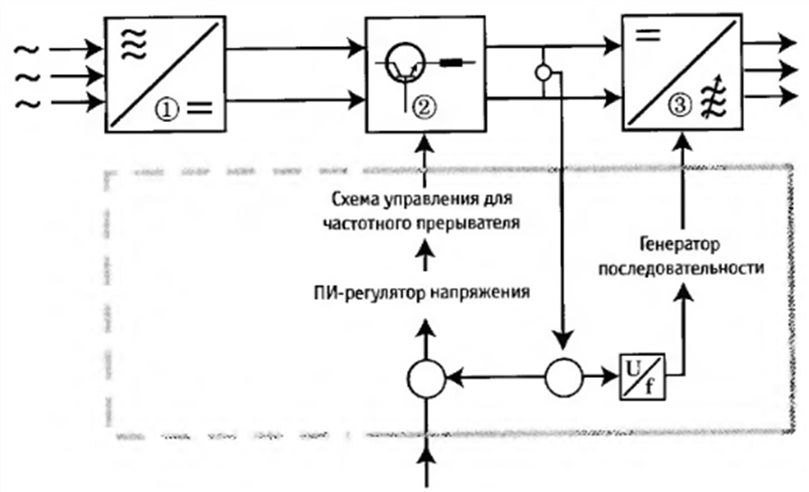
Arroz. 25 Principio de funcionamiento del circuito de control para un circuito intermedio controlado por un interruptor.
En la fig. 25 muestra un convertidor de frecuencia con control AIM y un disyuntor intermedio. El circuito de control controla el convertidor (2) y el inversor (3).
El control se basa en el valor instantáneo de la tensión del circuito intermedio.
El voltaje del circuito intermedio impulsa un circuito que actúa como un contador de direcciones de memoria para almacenar datos. La memoria almacena las secuencias de salida para el patrón de pulsos del inversor. Cuando aumenta el voltaje del circuito intermedio, el conteo es más rápido, la secuencia termina antes y la frecuencia de salida aumenta.
Con respecto al control del chopper, primero se compara la tensión del circuito intermedio con el valor nominal de la señal de referencia de tensión. Se espera que esta señal de voltaje proporcione el voltaje y la frecuencia de salida correctos. Si se cambian la señal de referencia y la señal del circuito intermedio, el controlador PI informa al circuito que es necesario cambiar el tiempo de ciclo. Esto hace que el voltaje del circuito intermedio se ajuste a la señal de referencia.
Un método de modulación común para controlar un convertidor de frecuencia es la modulación de amplitud de pulso (PAM). La modulación de ancho de pulso (PWM) es un método más moderno.
Control de campo (control vectorial)
El control de vectores se puede organizar de varias maneras. La principal diferencia entre los métodos son los criterios que se utilizan al calcular los valores de corriente activa, corriente de magnetización (flujo magnético) y par.
Al comparar motores de CC y motores asíncronos trifásicos (Fig. 26), se identifican ciertos problemas. En corriente continua, los parámetros que son importantes para generar par (flujo magnético (F) y corriente de armadura) se fijan en relación con el tamaño y la ubicación de la fase y están determinados por la orientación de los devanados de excitación y la posición del carbono. cepillos (Fig. 26a).
En un motor de CC, la corriente de armadura y la corriente que crea el flujo magnético se encuentran en ángulo recto entre sí y sus valores no son muy grandes. En un motor eléctrico asíncrono, la posición del flujo magnético (F) y la corriente del rotor (I,) depende de la carga. Además, a diferencia de un motor de CC, los ángulos de fase y la corriente no se pueden determinar directamente a partir del tamaño del estator.

Arroz. 26. Comparación de una máquina de CC y una máquina de inducción de CA
Sin embargo, con la ayuda de un modelo matemático, es posible calcular el par a partir de la relación entre el flujo magnético y la corriente del estator.
A partir de la corriente del estator medida (l s), se distingue una componente (l w) que crea un par con un flujo magnético (F) en ángulo recto entre estas dos magnitudes (l c). Esto crea un flujo magnético del motor eléctrico (Fig. 27).
![]()
Arroz. 27. Cálculo de componentes de corriente para control de campo
Con estos dos componentes de corriente, el par y el flujo magnético se pueden influir de forma independiente. Sin embargo, debido a la cierta complejidad de los cálculos basados en el modelo dinámico del motor eléctrico, tales cálculos son rentables solo en unidades digitales.
Debido a que el control de excitación independiente de la carga está separado del control de par en este método, es posible controlar dinámicamente un motor de inducción de la misma manera que un motor de CC, siempre que haya una señal de retroalimentación. Este método de control de un motor de CA trifásico tiene las siguientes ventajas:
Buena respuesta a los cambios de carga.
Control de potencia preciso
Par completo a velocidad cero
El rendimiento es comparable al de los variadores de CC.
Control vectorial de flujo y V/f
En los últimos años se han desarrollado sistemas de control de velocidad para motores trifásicos de corriente alterna basados en dos principios de control diferentes:
control V/f normal, o control ESCALAR, y control vectorial de flujo.
Ambos métodos tienen sus propias ventajas, según el rendimiento específico del variador (dinámica) y los requisitos de precisión.
El control V/f tiene un rango de control de velocidad limitado (aproximadamente 1:20) y se requiere un principio de control diferente (compensación) a baja velocidad. Con este método, es relativamente fácil adaptar el convertidor de frecuencia al motor y la regulación es inmune a los cambios de carga instantáneos en todo el rango de velocidad.
En los convertidores de frecuencia controlados por flujo, el convertidor de frecuencia debe configurarse con precisión para el motor, lo que requiere un conocimiento detallado de los parámetros del motor. También se necesitan componentes adicionales para recibir la señal de retroalimentación.
Algunas ventajas de este tipo de control:
Rápida respuesta a los cambios de velocidad y amplio rango de velocidades
Mejor respuesta dinámica a los cambios de dirección
Se proporciona un único principio de control en todo el rango de velocidad.
Para el usuario, la mejor solución sería una combinación de las mejores propiedades de ambos principios. Claramente, se requiere estabilidad de carga/descarga escalonada en todo el rango de velocidad, que suele ser un punto fuerte del control V/f, y una respuesta rápida a los cambios de referencia de velocidad (como en el control de campo).
Al diseñar dispositivos electrónicos, a menudo se requiere una fuente de alimentación con diferentes voltajes de salida. Los convertidores CC-CC en condensadores de conmutación se utilizan ampliamente en dispositivos modernos, lo que permite generar el voltaje requerido desde una sola fuente de alimentación. El artículo analiza los principios de funcionamiento de dichos convertidores, sus características técnicas y aplicaciones.
Consideremos el principio de funcionamiento del convertidor utilizando el ejemplo del microcircuito generalizado ICL7660 / MAX1044 con funcionalidad extendida. El chip MAX1044 se diferencia del ICL7660 en la presencia de la entrada Boost (que aumenta la frecuencia del oscilador interno). El diagrama de bloques del chip ICL7660 se muestra en la Fig. 1.
El circuito contiene cuatro interruptores MOS de potencia controlados por elementos lógicos y un variador de nivel de voltaje, que operan a una frecuencia obtenida al dividir por dos la frecuencia del oscilador RC maestro. Esto le permite generar pulsos de control con las características de "meandro" requeridas y optimizar el consumo del oscilador RC maestro, cuya frecuencia de operación sin elementos externos es de 10 kHz. Se necesita un regulador de voltaje interno para garantizar el funcionamiento del microcircuito desde una fuente con voltaje reducido.
El principio de funcionamiento del microcircuito en el modo de un inversor de voltaje ideal se considerará de acuerdo con el diagrama funcional que se muestra en la Fig. 2.
Cuando las teclas S1 y S3 se cierran y las teclas S2 y S4 se abren durante la primera mitad del ciclo, el capacitor externo C1 se carga desde la fuente de alimentación al voltaje V+, y cuando las teclas S2 y S4 se cierran y las teclas S1 y S3 se abren durante la segunda mitad del ciclo, el capacitor C1 transmite parcialmente su carga al capacitor externo C2, proporcionando un voltaje -V + en el pin V OUT del microcircuito. Los valores de voltaje especificados corresponden al estado estable.
La energía transferida por el capacitor C1 en un ciclo se determina usando la expresión
![]() (1)
(1)
Uno de los principales indicadores del convertidor es el factor de conversión.
![]() (2)
(2)
donde U out - voltaje en la salida del convertidor a una corriente de carga igual a i; U out.id. - voltaje a la salida de un convertidor ideal (para un inversor U out.id. = -U in).
De la expresión (2) se puede ver que se logra un alto valor del coeficiente de conversión cuando U out(i) = U out.id. , es decir. en V1 = V2. Sin embargo, como puede verse en la expresión (1), en este caso, la energía transferida por el condensador C1 disminuye, lo que dificulta asegurar un valor alto del coeficiente de conversión. Es posible aumentar la energía transferida por el capacitor aumentando la capacitancia C1 o la frecuencia de operación. En el primer caso, aumentan las dimensiones del condensador y, en consecuencia, las dimensiones del convertidor. En el segundo caso, las pérdidas de energía aumentan en un dispositivo real, lo que reduce su eficiencia.
donde Pout es la potencia entregada a la carga; Pin: potencia consumida de la fuente de alimentación.
Del análisis se puede ver que al desarrollar un dispositivo de conversión específico, es necesario optimizar los valores de la frecuencia de operación y la capacitancia del capacitor C1. Para hacer esto, es necesario prever la posibilidad de cambiar la frecuencia de operación de acuerdo con los valores de los voltajes de operación y las corrientes consumidas.
Considere las características eléctricas del microcircuito ICL7660, incluido de acuerdo con el circuito de prueba que se muestra en la Fig. 3.
Tabla 1. Breves características eléctricas del microcircuito en V + \u003d 5V, C OSC \u003d 0
Las dependencias típicas de las características eléctricas del chip ICL7660 se muestran en la Fig. 4-8.
Las dependencias dadas permiten refinar los parámetros del convertidor para valores específicos de voltajes de operación y corrientes consumidas.
Consideremos circuitos típicos para encender el chip ICL7660.
inversor de voltaje
El circuito para encender el microcircuito en el modo inversor de voltaje se muestra en la Fig. 9.

El inversor proporciona una salida de voltaje V OUT igual a -V + en el rango de 1.5V
La impedancia de salida del microcircuito depende del modo de CC y de la reactancia del condensador C1.
![]() (3)
(3)
Entonces, para el C1 nominal \u003d 10 microfaradios y la frecuencia f \u003d 10 kHz X C \u003d 3.18 Ohm. Para eliminar el efecto del capacitor C1 en la impedancia de salida, es necesario que X C
Para operar el microcircuito en el rango de 1.5V
Impedancia de salida reducida
Para reducir la resistencia de salida, puede aplicar la conexión en paralelo de microcircuitos, que se muestra en la Fig. 10.
La impedancia de salida de dicho circuito depende de la cantidad de microcircuitos conectados en paralelo. norte y se define mediante una expresión.
![]() (4)
(4)
La figura muestra que el condensador C1 es individual para cada microcircuito y el condensador C2 es común. La inclusión considerada de microcircuitos permite aumentar la corriente de salida, el factor de conversión y la eficiencia del convertidor.
Cascada de chips
Para aumentar el voltaje de salida, puede usar la cascada de microcircuitos, que se muestra en la Fig. 11.
El voltaje de salida de dicho convertidor es -nV +. Dado el rango permitido de 1.5V
Dobladores de voltaje
Para obtener un voltaje positivo de una fuente de voltaje negativo, además de duplicar el voltaje, se enciende el microcircuito, como se muestra en la Fig. 12.
En los pines 8 y 3, se genera un voltaje V OUT \u003d -V -, y en los pines 8 y 5 V OUT \u003d -2V -. El diodo es necesario para garantizar la etapa inicial de funcionamiento del microcircuito. En algunos casos, es conveniente utilizar el circuito de conmutación que se muestra en la Fig. 13.
El voltaje de salida de dicho convertidor es 2V + -2V F, donde V F es la caída de voltaje en el diodo hacia adelante (para diodos de silicio V F \u003d 0.5-0.7V).
Divisores de voltaje
Usando el chip ICL7660, puede obtener un poderoso divisor de voltaje cuando lo enciende, como se muestra en la Fig.14.
Fuentes de tensión combinadas
El chip ICL7660 le permite recibir voltajes con diferentes clasificaciones. Una de las opciones de conmutación se muestra en la Fig.15.
En el convertidor de voltaje que se muestra en la figura, se forman voltajes - (V + -V F) y 2V + -2V F.
Operación de búfer
Como se puede ver en el material discutido anteriormente, los convertidores con capacitores conmutados tienen propiedades reversibles. Esto le permite implementar el modo de búfer de su operación, una de las opciones que se muestra en la Fig.16.

El dispositivo se alimenta de la fuente V IN , que proporciona voltaje V OUT (quinta salida del n-ésimo microcircuito) y V + (octava salida del primer microcircuito): el voltaje de carga de la batería. Cuando falla la tensión de alimentación o se desconecta la fuente de alimentación, la tensión V OUT se generará a partir de la tensión de la batería V + .
Cambiar la frecuencia del generador ICL7660
Los parámetros de los convertidores considerados dependen de la frecuencia del generador de microcircuitos. La dependencia de la eficiencia de la frecuencia se muestra en la Fig.6.
En la figura se puede ver que con una corriente de salida de 1 mA, se proporciona una alta eficiencia a frecuencias por debajo de 1 kHz. A frecuencias más altas, las pérdidas en los circuitos de control del generador y del interruptor de potencia reducen la eficiencia general. Para lograr una alta eficiencia en este caso particular, es necesario reducir la frecuencia de operación del convertidor. La frecuencia de operación se puede reducir usando un oscilador externo o conectando C OSC como se muestra en la Fig.3.
Un método más simple es usar un capacitor externo, cuya capacitancia se puede determinar a partir del gráfico que se muestra en la Fig. 8.
Para el caso considerado anteriormente, la frecuencia de operación igual a 1 kHz se logra conectando un capacitor externo con una capacidad de C OSC \u003d 100pF. Al aplicar este método, se debe tener en cuenta que con C OSC mayor a 1000pF, se debe aumentar la capacitancia de los capacitores C1 y C2 a 100 microfaradios.
El método considerado para cambiar la frecuencia del generador se utiliza en dispositivos de micropotencia para garantizar una alta eficiencia del convertidor.
En algunos casos, se debe aumentar la frecuencia de operación del convertidor. En estos casos es posible utilizar C1 y C2 de menor capacidad y por tanto de menores dimensiones. También reduce los niveles de ruido del generador en los sistemas de audio. La forma más fácil de aumentar la frecuencia es con el pin Boost en el MAX1044. Cuando la llave S1 está cerrada (Fig. 3), la frecuencia de operación del microcircuito aumenta 6 veces.
Modo de bajo consumo
Cuando se opera en modo de espera, es necesario reducir la potencia consumida por el convertidor. Algunos microcircuitos tienen una entrada SD, con la que puedes reducir el consumo de corriente a unidades de microamperios. El modo de bajo consumo también se puede implementar utilizando la entrada OSC. Las opciones para implementar este modo cuando se utilizan elementos lógicos convencionales, elementos lógicos con un drenaje abierto (colector), así como aquellos con un tercer estado se muestran en la Fig.17.

Varias empresas producen microcircuitos de convertidores de voltaje en condensadores conmutados: Maxim, National Semiconductor, Microchip, etc. Estos microcircuitos tienen el mismo principio de funcionamiento y difieren en sus funciones implementadas, parámetros eléctricos y diseño. El líder indudable en esta área es Maxim, que produce la más amplia gama de microcircuitos convertidores. En la tabla 2 se muestran las características de algunos de los chips fabricados por diversas empresas.
Tabla 2. Breves características de los microcircuitos.
| Tipo de chip | Características implementadas | Corriente de salida (mA) | Voltaje de entrada V IN (V) | Frecuencia (kHz) | Consumo de corriente (μA) | Nota |
| ICL7660 TC7660 LMC7660 | -(V EN) o 2(V ENTRADA) o ½(V ENTRADA) | 20 | 1.5÷10 | 10 | 250 | |
| MAX889 | (-2.5V) (-V ENTRADA) | 200 | 2.7÷5.5 | 2000 | 50000 | Función de apagado incorporada |
| MAX1680 MAX1681 | -(V ENTRADA) o 2(V ENTRADA) | 125 | 2÷5.5 | 125÷200 500÷1000 | 30000 | |
| MAX680 | 2 (VIN) y -2 (VIN) | 10 | 2÷6 | 8 | 1000 | |
| MAX681 | 2 (VIN) y -2 (VIN) | 10 | 2÷6 | 8 | 1000 | Sin condensadores externos |
| MAX1673 | 3B | 125 | 2÷5.5 | 350 | 16000 | |
| LM3350 | 3/2 (V ENTRADA) o 2/3 (VIN) | 50 | 1.5÷5.5 | 1600 | ||
| LM3352 | 2,5 V; 3V o 3.3V | 200 | 2.5÷5.5 | 1000 | ||
| MAX870 | -(V EN) o 2(V ENTRADA) o ½(V ENTRADA) | 50 | 1.6÷5.5 | 56÷194 | 1000 | |
| MAX864 | 2 (VIN) y -2 (VIN) | 100 | 1.75÷6 | 7÷185 | 5000 | Función de apagado incorporada |
Nota: microcircuitos MAX, ICL - firmas MAXIM; LM, LMC - Semiconductor nacional; TC - Microchip.
La tabla muestra que los convertidores en condensadores conmutados pueden operar en los modos de un inversor, un duplicador, un divisor de voltaje de entrada por dos y le permiten generar varios voltajes en la salida al mismo tiempo. Algunos microcircuitos tienen reguladores de voltaje incorporados. Los microcircuitos considerados se utilizan ampliamente en computadoras portátiles, teléfonos móviles, buscapersonas, dispositivos portátiles y otros dispositivos. En la práctica de radioaficionados, se pueden utilizar, por ejemplo, para generar voltajes de alimentación multipolares para amplificadores operacionales, para proporcionar energía de búfer a dispositivos electrónicos desde una sola celda de batería, para generar un voltaje de suministro de LCD, etc. Dimensiones pequeñas, alto factor de conversión y eficiencia, ausencia de inductancias, propiedades reversibles son muy atractivas para el uso de los convertidores considerados en el desarrollo de diversos dispositivos electrónicos.
Literatura
- Maxim Full-line CD-Catálogo Versión 5.0 Edición 2001.
- Libro de datos nacional de productos analógicos e interfaces, edición de 2001.
Le recomendamos que lea
, diagnóstico, tratamiento Tratamiento de la clamidia urogenital") Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital
Clamidia urogenital: descripción, causas, síntomas (signos), diagnóstico, tratamiento Tratamiento de la clamidia urogenital Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué
Los beneficios y la importancia del hidroaminoácido treonina para el cuerpo humano L treonina qué Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército?
Esperar o no esperar a un tipo del ejército ¿Por qué razón pueden ser comisionados del ejército? Manzanas al horno con requesón Manzanas al horno con requesón
Manzanas al horno con requesón Manzanas al horno con requesón

