Внушительная мощность асинхронного электродвигателя , трансформирующего электричество в энергию вращения, создается не за счет каких-либо механических составляющих: для такого мощного вращения в его «начинке» используются только электромагниты.
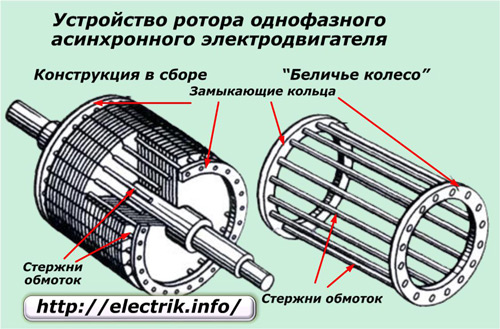
Ротор асинхронного двигателя: конструкция
Ротор – вращающийся внутри статора (неподвижного компонента) элемент электродвигателя, вал которого соединен с деталями рабочих агрегатов, например, пил, турбин и помп. Шихтованный сердечник выполняется из отдельных пластин электротехнической стали с полузакрытыми или открытыми пазами.
Двигатель является электромеханическим устройством, которое преобразует электрическую энергию в механическую. и трехфазный двигатель, работающий на синхронной скорости, называется синхронным двигателем. Когда два противоположных полюса приближаются друг к другу, если магниты сильны, существует огромная сила притяжения между этими двумя полюсами. В таком состоянии два магнита называются магнитными.
Принцип синхронного вращения
Как ротор вращается с синхронной скоростью? Теперь, чтобы понять концепцию синхронной работы двигателя, рассмотрите двухполюсный простой ротор. Синхронный двигатель представляет собой машину с удвоенным возбуждением, к которой прилагаются два электрических входа. Следовательно, синхронный двигатель вращается с одной и только одной скоростью, то есть с синхронной скоростью. Но все это зависит от наличия магнитного запирания между полюсами статора и ротора. Практически невозможно, чтобы полюсы статора вытащили полюсы ротора из их стационарного положения в состояние магнитной фиксации. это причина, по которой синхронные двигатели не запускаются самостоятельно.
Массивный ротор представляет собой цельный стальной цилиндр, помещенный внутрь статора, с напресованным на его поверхность сердечником.
Бесконтактная, не соединенная ни с какой внешней электрической цепью обмотка ротора, создает вращательный момент и бывает двух типов:
- короткозамкнутая (короткозамкнутый ротор);
- фазная (фазный ротор).
Короткозамкнутый ротор
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности), играют роль электромагнитов с полюсами, обращенными к статору. Такая конструкция носит название «беличья клетка», данное ей русским электротехником М. О. Доливо-Добровольским.
Методы запуска синхронного двигателя. Через некоторое время, когда происходит магнитное блокирование, подача на внешний двигатель отключается от муфты. Применение синхронных двигателей. Он используется там, где требуется высокая мощность при постоянной скорости.
Поскольку синхронный двигатель способен работать как с ведущим, так и с запаздывающим коэффициентом мощности, его можно использовать для повышения коэффициента мощности. Синхронный двигатель без нагрузки с ведущим коэффициентом мощности подключается в энергосистеме, где статические конденсаторы не могут использоваться.
Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое. Более часто используемый для стержней двигателей средней мощности, легко плавящийся алюминий, отличается малой плотностью и высокой электропроводностью. Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля, стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения.
Конструкция индукционного двигателя с роторным ротором
Синхронный двигатель находит применение там, где рабочая скорость меньше и требуется высокая мощность. В моей последней статье мы обсудили, какой тип. Этот двигатель - тот, который использует раневой ротор. Асинхронный двигатель с роторным ротором также известен как асинхронный двигатель скольжения. Как и в других асинхронных двигателях, основными частями являются статор и ротор. Статор этого двигателя такой же, как и в асинхронных двигателях с короткозамкнутым ротором. Ротор - это часть, которая отличает его от других асинхронных двигателей.
В двигателях малой мощности пазы сердечника, как правило, выполняют закрытыми: отделяющая ротор от воздушного зазора — стальная пластина позволяет дополнительно закрепить обмотки, но за счет некоторого увеличения их индуктивного сопротивления.
Фазный ротор
Характеризуется практически не отличающейся от обмотки статора трехфазной (в более общем случае — многофазной) уложенной в пазы сердечника обмоткой, концы которой соединены по схеме «звезда» . Выводы обмоток присоединены к закрепленным на валу ротора контактным кольцам, к которым при пуске двигателя прижимаются и скользят неподвижные, соединенные с реостатом графитовые или металлографитовые щетки.
Статор индукционного двигателя ротатора раны
Позвольте мне дать вам краткое представление о статоре, а затем расскажу вам о структуре ротора.
Ротор индукционного двигателя ротатора раны
В индукционном двигателе роторного ротора ротор имеет трехфазную обмотку, подобную обмотке статора. Обмотка размещается равномерно на пазах ротора. соединены с 3 кольцами скольжения. Это все о строительстве ротора. Теперь давайте обсудим принцип работы.Работа индукционного двигателя с раневым ротором
Магнитное поле статора и магнитное поле ротора взаимодействуют и приводят к крутящему моменту, который превратит ротор.- Ротор также имеет цилиндрическую форму и имеет отверстия для намотки.
- Эти кольца скольжения установлены на валу.
- Каждая фаза подключается к одному из трех колец скольжения.
- Эти кольца скольжения связаны с щетками.
- Три кольца скольжения вращаются с ротором, а кисти остаются неподвижными.
- Это магнитное поле называется магнитным полем ротора.
Для ограничения возникающих вихревых токов обычно бывает достаточно нанесенной на поверхность обмоток оксидной пленки, вместо изолирующих лаков.
Добавленный в цепь обмотки ротора трехфазный пусковой или регулировочный резистор, позволяет изменять активное сопротивление роторной цепи, способствуя уменьшению больших пусковых токов. Могут использоваться реостаты:
Скорость и крутящий момент можно регулировать в этих двигателях путем изменения сопротивления. Некоторые из характеристик асинхронных двигателей роторного ротора представлены ниже. Индукционный двигатель Ротора раны требует дополнительного обслуживания из-за скольжения и кистей. Этот двигатель потребляет меньше тока при старте по сравнению с асинхронными двигателями с короткозамкнутым ротором. Индукционный двигатель с роторным ротором менее эффективен, чем асинхронные двигатели с короткозамкнутым ротором.
- Можно управлять скоростью таких двигателей.
- Момент также можно контролировать.
- Эти двигатели имеют высокий пусковой момент.
- Такие двигатели дороги, чем другие асинхронные двигатели.
- Стоимость обслуживания также учитывается.
- Эти двигатели имеют низкий коэффициент мощности.
- металлические проволочные или ступенчатые – с ручным или автоматическим переключением с одной ступени сопротивления на другую;
- жидкостные, сопротивление которых регулируется глубиной погружения в электролит электродов.
Для увеличения долговечности щеток, некоторые модели фазных роторов оборудуются специальным короткозамкнутым механизмом, поднимающим после пуска двигателя щетки и замыкающим кольца.
И там, где асинхронные двигатели с короткозамкнутым ротором не могут использоваться из-за их высоких стартовых токов. Индукционный двигатель Ротора раны используется в приложениях, требующих плавного пуска и регулируемой скорости. Некоторые из применений этого двигателя включают краны, мельницы, подъемники и конвейеры. Асинхронный двигатель с роторным ротором также используется в вентиляторах, воздуходувках и смесителях. Они используются в крупных насосах в водной промышленности.
- Они используются в местах, где требуется высокий пусковой момент.
- Эти двигатели используются с высокими инерционными нагрузками.
Асинхронные двигатели с фазным ротором характеризуются более сложной конструкцией, чем с короткозамкнутым, но, в то же время, более оптимальными пусковыми и регулировочными характеристиками.
Принцип работы
Электромагниты статора расположены близко к стержням ротора и передают на них электричество для его вращения. Индуцированное в роторе магнитное поле будет следовать за магнитным полем статора, осуществляя, при этом, механическое вращение роторного вала и связанных с ним агрегатов. При этом, созданная катушками статора электромагнитная индукция, выталкивает ток на стержнях строго от себя. Значение тока в стержнях изменяется со временем.
Они используются в различных промышленных применениях, но могут быть защищены от различных фалютов, таких как механические электрические неисправности, чтобы помочь их целям. В этой статье рассматривается система защиты асинхронных двигателей от возникающих сбоев. Этот электродвигатель испытывает различные типы электрических неисправностей, таких как перенапряжение, под напряжением, перегрузкой, несимметричным напряжением, размыканием заземления фазы и однофазным. Из-за этих электрических неисправностей обмотки двигателя нагреваются, что приведет к снижению срока службы двигателя.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на , буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Само название этого электротехнического устройства свидетельствует о том, что электрическая энергия, поступающая на него, преобразуется во вращательное движение ротора. Причем прилагательное «асинхронный» характеризует несовпадение, отставание скоростей вращения якоря от магнитного поля статора.
Степень асинхронного двигателя зависит от затрат и функций двигателя. Направленная система предназначена для защиты асинхронного двигателя от перегрева и однофазного. Система защиты, использующая множество двигателей для производства, очень важна в отраслях.
Основным планом проектирования этого проекта является обеспечение безопасности в отраслях. Если температура двигателя во время процесса превышает пороговое значение, двигатель останавливается без задержки. В системе используется трехфазный источник питания, к которому подключены 3-фазные трансформаторы. Если какая-либо из фаз недоступна, то эквивалентный трансформатор заканчивается, подавая питание на цепь.
Слово «однофазный» вызывает неоднозначное определение. Связано это с тем, что в электрике определяет несколько явлений:
сдвиг, разность углов между векторными величинами;
потенциальный проводник двух, трех или четырехпроводной электрической схемы переменного тока;
одну из обмоток статора или ротора трехфазного двигателя либо генератора.
Основное реле питается через набор 4-реле, которые отсоединяются из-за того, что одно реле не управляется электропитанием. Таким образом, основное реле обеспечивает трехфазное питание двигателя, которое отключается. Термистор подключен к корпусу асинхронного двигателя для определения температуры. Если температура повышается, питание 4-го реле отключается.
Далее этот проект может быть разработан с использованием датчиков тока для защиты от перегрузки и датчика последовательности фаз, чтобы защитить двигатель от неправильной последовательности фаз. Таким образом, все это касается системы защиты асинхронных двигателей. Мы надеемся, что вам лучше понять эту концепцию.
Поэтому сразу уточним, что однофазным электродвигателем принято называть тот, который работает от двухпроводной сети переменного тока, представленной фазным и нулевым потенциалом. Количество обмоток, вмонтированных в различных конструкциях статоров, на это определение не влияют.
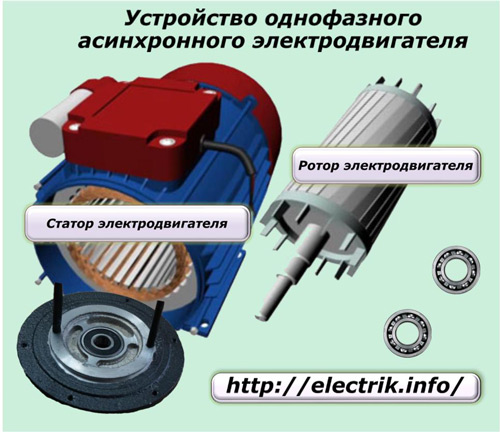
Конструкция электродвигателя
По своему техническому устройству асинхронный двигатель состоит из:
Применение фазосдвигающей обмотки в статоре
Его основными характеристиками являются: Надежность Низкая стоимость приобретения и обслуживания Возможность контроля скорости. Насосы и компрессоры Вентиляторы Фрезы Беговые дорожки, конвейеры и лифты Шлифовальные машины и дробилки Пилы, токарные станки и шлифовальные машины.
Работа всех электродвигателей, включая трехфазный асинхронный двигатель, основана на магнитном поле, создаваемом электрическим током, циркулирующим в обмотках машины. Что касается трехфазного асинхронного двигателя, то он имеет три обмотки в конструкции, называемой статором.
1. статора — статической, неподвижной части, выполненной корпусом с расположенными на нем различными электротехническими элементами;
2. ротора, вращаемого силами электромагнитного поля статора.
Механическое соединение этих двух деталей выполнено за счет подшипников вращения, внутренние кольца которых посажены на подогнанные гнезда вала ротора, а внешние вмонтированы в защитные боковые крышки, закрепляемые на статоре.
Результирующая магнитного поля, создаваемого каждым электрическим током, имеет вращающийся характер и с постоянной скоростью. Как же мы можем найти полученное поле? Когда катушка управляется электрическим током, создается магнитное поле, направленное вдоль оси катушки и имеющее значение, пропорциональное току.
Трехфазная обмотка состоит из трех однофазных прокладок на 120 Ом. Эти поля расположены на расстоянии 120 градусов друг от друга. Это магнитное поле притягивает подвижную структуру, называемую ротором, заставляя ее вращаться. Синхронная скорость вращающегося поля задается следующим образом.
Ротор
Его устройство у этих моделей такое же, как у всех асинхронных двигателей: на стальном валу смонтирован магнитопровод из шихтованных пластин на основе мягких сплавов железа. На его внешней поверхности выполнены пазы, в которые вмонтированы стержни обмоток из алюминия или меди, закороченные по концам на замыкающие кольца.
Наиболее распространенные значения полюсов: 2, 4, 6 или 8 полюсов. Движущаяся часть, называемая ротором, ответственная за передачу механического движения на нагрузку, например лифт. Очевидно, что все устройства, которые меня интересуют, оснащены асинхронным двигателем.
Принцип и работа асинхронного двигателя
Какие преимущества имеет этот тип двигателя? Вот несколько ответов. Асинхронный двигатель представляет собой высокопроизводительный двигатель, часто используемый в области транспорта, промышленности и бытовой техники. Состоит из двух отдельных частей, называемых ротором и статором, асинхронный двигатель обязан своим именем разнице в мощности, измеренной на каждой из этих частей. Действительно, хотя статор вращается с определенной скоростью, определяемой электрическим током, ротор, тем временем, генерирует свое собственное магнитное поле и имеет собственную скорость вращения, которая не пропорциональна скорости статора.
В обмотке ротора протекает электрический ток, индуцируемый магнитным полем статора, а магнитопровод служит для хорошего прохождения создаваемого здесь же магнитного потока.
Отдельные конструкции ротора у однофазных двигателей могут быть выполнены из немагнитных или ферромагнитных материалов в форме цилиндра.
Асинхронный двигатель и кухонный комбайн
Эта разница, называемая фазовым сдвигом, обычно составляет от 2 до 10%. Асинхронный двигатель широко используется в мире бытовой техники, в основном для стиральных машин, посудомоечных машин и сушилок. Этот тип двигателя обладает большой прочностью и обеспечивает относительно спокойную работу. В случае бытовых роботов наличие асинхронного двигателя имеет важное преимущество: поскольку две части двигателя вращаются с другой скоростью, лопасти робота могут адаптировать свою скорость к содержимому в самой чаше когда устройство работает на полную мощность.
Статор
Конструкция статора также представлена:
корпусом;
магнитопроводом;
обмоткой.
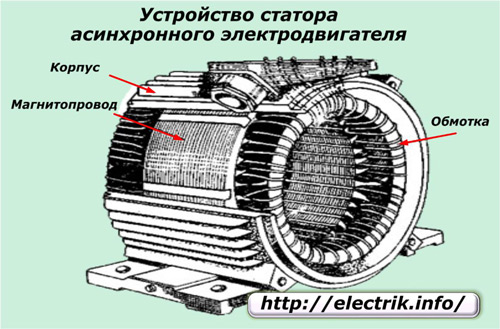
Его основное назначение заключается в генерировании неподвижного или вращающегося электромагнитного поля.
Статорная обмотка обычно состоит из двух контуров:
Другими словами, чем плотнее приготовление пищи, тем медленнее поворачивается робот, даже если он настроен на максимальную мощность. Асинхронный двигатель также предлагает возможность адаптировать скорость устройства к количеству продуктов, присутствующих в контейнере. Вкратце: роботы, на которых установлен асинхронный двигатель, являются интеллектуальными роботами. Еще одно значительное преимущество: асинхронный двигатель домашних роботов делает эти устройства более спокойными. Критерий выбора для приготовления пищи в воскресенье утром без пробуждения всего дома!
1. рабочего;
2. пускового.
У самых простых конструкций, предназначенных для ручной раскрутки якоря, может быть выполнена всего одна обмотка.
Принцип работы асинхронного однофазного электрического двигателя
С целью упрощения изложения материала представим, что обмотка статора выполнена всего одним витком петли. Ее провода внутри статора разносят по кругу на 180 угловых градусов. По ней проходит переменный синусоидальный ток, имеющий положительные и отрицательные полуволны. Он создает не вращающееся, а пульсирующее магнитное поле.
Как возникают пульсации магнитного поля
Разберем этот процесс на примере протекания положительной полуволны тока в моменты времени t1, t2, t3.
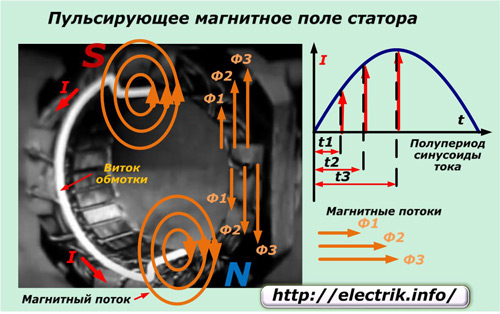
Она проходит по верхней части токопровода по направлению к нам, а по нижней — от нас. В перпендикулярной плоскости, представленной магнитопроводом, вокруг проводника возникают магнитные потоки Ф.
Изменяющиеся по амплитуде токи в рассматриваемые моменты времени создают разные по величине электромагнитные поля Ф1, Ф2, Ф3. Поскольку ток в верхней и нижней половине один и тот же, но виток изогнут, то магнитные потоки каждой части направлены встречно и уничтожают действие друг друга. Определить это можно по правилу буравчика или правой руки.
Как видим, при положительной полуволне вращения магнитного поля не наблюдается, а происходит только его пульсация в верхней и нижней части провода, которая еще и взаимно уравновешивается в магнитопроводе. Этот же процесс происходит при отрицательном участке синусоиды, когда токи изменяют направление на противоположное.
Поскольку вращающееся магнитное поле отсутствует, то и ротор останется неподвижным, ибо нет сил, приложенных к нему для начала вращения.
Как создается вращение ротора в пульсирующем поле
Если теперь придать ротору вращение, хотя бы рукой, то он будет продолжать это движение.
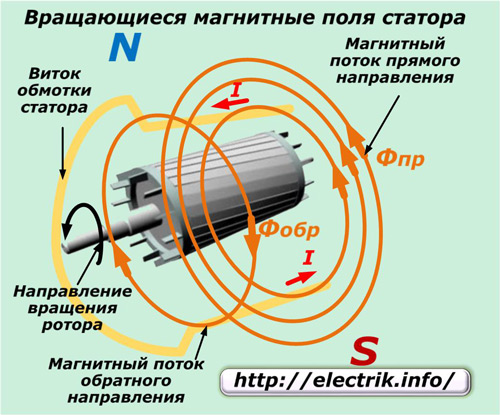
Для объяснения этого явления покажем, что суммарный магнитный поток изменяется по частоте синусоиды тока от нуля до максимального значения в каждом полупериоде (с изменением направления на противоположное) и состоит из двух частей, образуемых в верхней и нижней ветвях, как показано на рисунке.
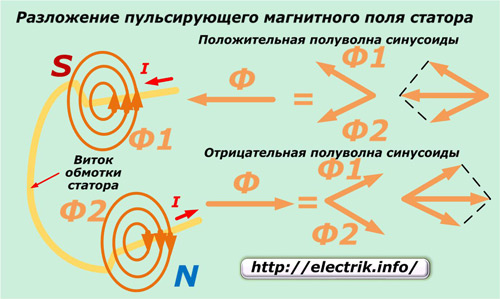
Магнитное пульсирующее поле статора состоит из двух круговых с амплитудой Фмакс/2 и двигающихся в противоположных направлениях с одной частотой.
nпр=nобр=f60/p=1.
В этой формуле обозначены:
nпр и nобр частоты вращения магнитного поля статора в прямом и обратном направлениях;
n1 — скорость вращающегося магнитного потока (об/мин);
p — число пар полюсов;
f — частота тока в обмотке статора.
Теперь рукой придадим вращение двигателю в одну сторону, и он сразу подхватит движение за счет возникновения вращающегося момента, вызванного скольжением ротора относительно разных магнитных потоков прямого и обратного направлений.
Примем, что магнитный поток прямого направления совпадает с вращением ротора, а обратный, соответственно, будет противоположен. Если обозначить через n2 частоту вращения якоря в об/мин, то можно записать выражение n2 < n1.
При этом обозначим Sпр = (n1-n2)/n1 = S.
Здесь индексами S и Sпр названы скольжения асинхронного двигателя и ротора относительного магнитного потока прямого направления.
У обратного потока скольжение Sобр выразится аналогичной формулой, но со сменой знака n2.
Sобр = (n1 - (-n2))/n1 = 2-Sпр.
В соответствии с законом электромагнитной индукции под действием прямого и обратного магнитных потоков в обмотке ротора станет действовать электродвижущая сила, которая создаст в ней токи таких же направлений I2пр и I2обр.

Их частота (в герцах) будет прямо пропорциональна величине скольжения.
f2пр=f1∙Sпр;
f2обр=f1∙Sобр.
Причем частота f2обр, образованная наведенным током I2обр, значительно превышает частоту f2пр.
Например, электродвигатель работает от сети 50 Гц с n1=1500, а n2=1440 оборотов в минуту. Его ротор имеет скольжение относительно магнитного потока прямого направления Sпр=0,04 и частоту тока f2пр=2 Гц. Обратное же скольжение Sобр=1,96, а частота тока f2обр=98 Гц.
На основании закона Ампера при взаимодействии тока I2пр и магнитного поля Фпр появится вращающий момент Мпр.
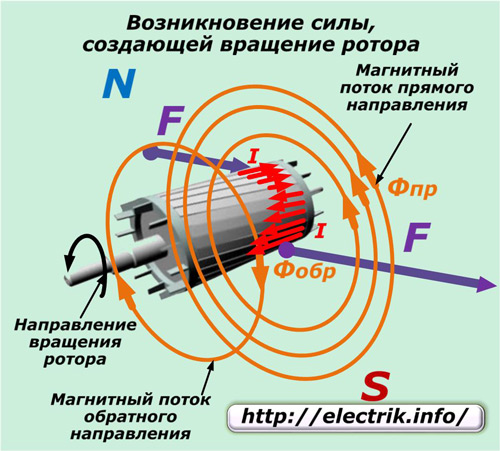
Мпр=сМ∙Фпр∙I2пр∙cosφ2пр.
Здесь величина постоянного коэффициента сМ зависит от конструкции двигателя.
При этом также действует обратный магнитный поток Мобр, который вычисляется по выражению:
Мобр=сМ∙Фобр∙I2обр∙cosφ2обр.
В итоге взаимодействия этих двух потоков появится результирующий:
М= Мпр-Мобр.
Внимание! При вращении ротора в нем наводятся токи разной частоты, которые создают моменты сил с разными направлениями. Поэтому якорь двигателя будет совершать вращение под действием пульсирующего магнитного поля в ту сторону, с которой он начал вращение.
Во время преодоления однофазным двигателем номинальной нагрузки создается небольшое скольжение с основной долей прямого крутящего момента Мпр. Противодействие тормозного, обратного магнитного поля Мобр сказывается совсем незначительно из-за различия частот токов прямого и обратного направлений.
f2обр обратного тока значительно превышает f2пр, а создаваемое индуктивное сопротивление Х2обр сильно превышает активную составляющую и обеспечивает большое размагничивающее действие обратного магнитного потока Фобр, который в итоге этого уменьшается.
Поскольку коэффициент мощности у двигателя под нагрузкой небольшой, то обратный магнитный поток не может оказать сильное воздействие на вращающийся ротор.
Когда же одна фаза сети подана на двигатель с неподвижным ротором (n2=0), то скольжения, как прямое, так и обратное равны единице, а магнитные поля и силы прямого и обратного потоков уравновешены и вращения не возникает. Поэтому от подачи одной фазы невозможно раскрутить якорь электродвигателя.
Как быстро определить частоту вращения двигателя:
Как создается вращение ротора у однофазного асинхронного двигателя
За всю историю эксплуатации подобных устройств разработаны следующие конструкторские решения:
1. ручная раскрутка вала рукой или шнуром;
2. использование дополнительной обмотки, подключаемой на время запуска за счет омического, емкостного или индуктивного сопротивления;
3. расщепление короткозамкнутым магнитным витком магнитопровода статора.
Первый способ использовался в начальных разработках и не стал применяться в дальнейшем из-за возможных рисков получения травм при запуске, хотя он не требует подключения дополнительных цепочек.
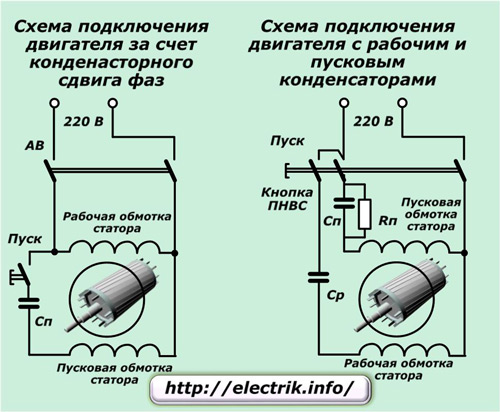
Применение фазосдвигающей обмотки в статоре
Чтобы придать начальное вращение ротору к статорной обмотке дополнительно на момент запуска подключают еще одну вспомогательную, но только сдвинутую по углу на 90 градусов. Ее выполняют более толстым проводом для пропускания бо́льших токов, чем протекающие в рабочей.
Схема подключения такого двигателя показана на рисунке справа.

Здесь для включения применяется кнопка типа ПНВС, которая специально создана для таких двигателей и широко использовалась в работе стиральных машин, выпускаемых при СССР. У этой кнопки сразу включаются 3 контакта таким образом, что два крайних после нажатия и отпускания остаются зафиксированы во включенном состоянии, а средний — кратковременно замыкается, а потом под действием пружины возвращается в исходное положение.
Замкнутые же крайние контакты можно отключить нажатием на соседнюю кнопку «Стоп».

Кроме кнопочного выключателя для отключений дополнительной обмотки в автоматическом режиме используются:
1. центробежные переключатели;
2. дифференциальные или токовые реле;
Для улучшения запуска двигателя под нагрузкой применяются дополнительные элементы в фазосдвигающей обмотке.
В такой схеме к статорной дополнительной обмотке последовательно монтируется омическое сопротивление. При этом намотка витков выполняется биффилярным способом, обеспечивающим коэффициент самоиндукции катушки очень близким к нулю.
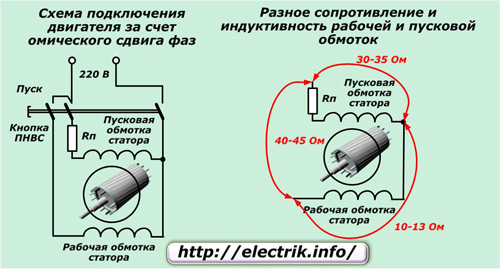
За счет выполнения этих двух приемов при прохождении токов по разным обмоткам между ними возникает сдвиг по фазе порядка 30 градусов, чего вполне достаточно. Разность углов создается за счет изменения комплексных сопротивлений в каждой цепи.
При этом методе еще может встречаться пусковая обмотка с заниженной индуктивностью и увеличенным сопротивлением. Для этого применяют намотку с маленьким числом витков провода заниженного поперечного сечения.
Емкостной сдвиг токов по фазе позволяет создать кратковременное подключение обмотки с последовательно соединенным конденсатором. Эта цепочка работает только во время выхода двигателя на режим, а затем отключается.
У конденсаторного запуска создается наибольший крутящий момент и более высокий коэффициент мощности, чем при резистивном или индуктивном способе запуска. Он может достигать величины 45÷50% от номинального значения.
В отдельных схемах к цепочке рабочей обмотки, которая постоянно включена, тоже добавляют емкость. За счет этого добиваются отклонения токов в обмотках на угол порядка π/2. При этом в статоре сильно заметен сдвиг максимумов амплитуд, который обеспечивает хороший крутящий момент на валу.
За счет этого технического приема двигатель при пуске способен выработать больше мощности. Однако, такой метод используют только с приводами тяжелого запуска, например, для раскрутки барабана стиральной машины, заполненного бельем с водой.
Конденсаторный запуск позволяет изменять направление вращения якоря. Для этого достаточно сменить полярность подключения пусковой или рабочей обмотки.
Подключение однофазного двигателя с расщепленными полюсами
У асинхронных двигателей с небольшой мощностью порядка 100 Вт используют расщепление магнитного потока статора за счет включения в полюс магнитопровода короткозамкнутого медного витка.
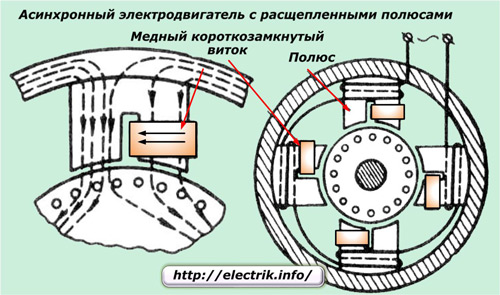
Разрезанный на две части такой полюс создает дополнительное магнитное поле, которое сдвинуто от основного по углу и ослабляет его в месте охваченного витком. За счет этого создается эллиптическое вращающееся поле, образующее момент вращения постоянного направления.
В подобных конструкциях можно встретить магнитные шунты, выполненные стальными пластинками, которые замыкают края наконечников статорных полюсов.
Двигатели подобных конструкций можно встретить в вентиляторных устройствах обдува воздуха. Они не обладают возможностью реверса.


")


