На величину вращающего момента асинхронного двигателя большое влияние оказывает сдвиг фаз между током I 2 и э. д. с. E 2S ротора.
Рассмотрим случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз можно пренебречь (фиг. 223, а).
Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающихся, предположим, по направлению часовой стрелки. Пользуясь правилом правой руки, определяем направление э. д. с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу левой руки. Как видно из чертежа, ротор под действием сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
Рассмотрим второй случай, когда индуктивность обмотки ротора велика. В этом случае сдвиг фаз между током ротора I 2 и э. д. с. ротора Е 2S будет также большим. На фиг. 223, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э. д. с. остается таким же, как и на фиг. 223, а, но вследствие запаздывания тока по фазе ось магнитного поля ротора не будет уже совпадать с нейтральной линией поля статора, а сместится на некоторый угол против вращения магнитного поля. Это приведет к тому, что наряду с образованием вращающего момента, направленного в одну сторону, некоторые проводники создадут встречный вращающий момент.
Отсюда видно, что общий вращающий момент двигателя при сдвиге фаз между током и э. д. с. ротора меньше, чем для случая, когда I 2 и Е 2S совпадают по фазе. Можно доказать, что вращающий момент асинхронного двигателя обусловливается только активной слагающей тока ротора, т. е. током I 2 cos и что он может быть вычислен по формуле:
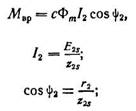
Ф m -магнитный поток статора (а также приближенно равный результирующему магнитному потоку асинхронного двигателя);
Угол сдвига фаз между э. д. с. и током фазы обмотки
С - постоянный коэффициент.
После подстановки:
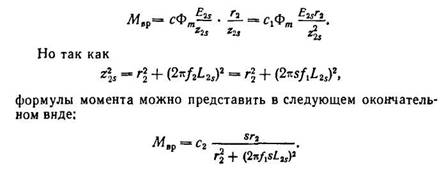
Из последнего выражения видно, что вращающий момент асинхронного двигателя зависит от скольжения.
На фиг. 224 изображена кривая А зависимости вращающего момента двигателя от скольжения. Из кривой видно, что в момент пуска, когда s=l и n = 0, вращающий момент двигателя невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos имеет малое значение (по-
|
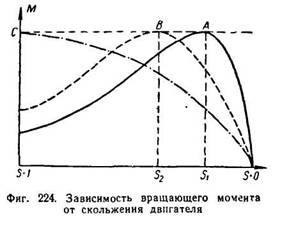
рядка 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет небольшим.
При некотором скольжении S 1 вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения или, иначе говоря, при даль, нейшем увеличении скорости вращения двигателя его момент будет быстро умень-
Шаться и при скольжении s = 0 момент вращения двигателя бу- дет также равен нулю.
Следует оговориться, что у асинхронного двигателя скольжение, равное нулю, практически быть не может. Это возможно лишь в том случае, если ротору сообщить извне вращающий момент в сторону вращения поля статора.
Пусковой момент можно увеличить, если в момент пуска уменьшить сдвиг фаз между током и э. д. с. ротора. Из формулы
видно, что если при постоянном индуктивном сопротивлении обмотки ротора увеличить активное сопротивление, то и сам угол будут уменьшаться, что приведет к тому, что и вращающий момент двигателя станут больше. Этим пользуются на практике для увеличения пускового вращающего момента двигателя. В момент пуска в цепь ротора вводят активное сопротивление (пусковой реостат), которое затем выводят, как только двигатель увеличит скорость.
Увеличение пускового момента приводит к тому, что максимальный вращающий момент двигателя получается при большем скольжении (точка S 2 кривой B на фиг. 224). Путем увеличения активного сопротивления цепи ротора при пуске можно добиться того, что максимальный вращающий момент будет в момент пуска (s = 1 кривой С).
Вращающий момент асинхронного двигателя пропорционален квадрату напряжения, поэтому даже небольшое уменьшение напряжения сопровождается резким уменьшением вращающего момента.
Мощность P 1 , подводимая к обмотке статора асинхронного двигателя, равна:
![]()
где m 1 - число фаз.
В статоре двигателя имеются следующие потери энергии:
1) в обмотке статора Р эс. =m 1 I 1 2 r 1 ;
2) в стали статора иа гистерезис и вихревые токи Р C .
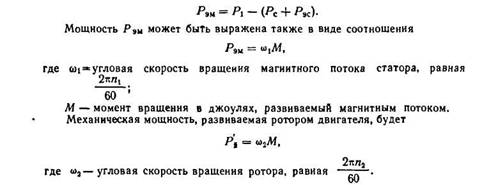
Мощность, подводимая к ротору, представляет собой мощность вращающегося магнитного поля, называемую также электромагнитной мощностью Р эM .
Электромагнитная мощность равна разности между подводимой к двигателю мощностью и потерями в статоре двигателя, т. е.
|
Разность между Р эM и представляет собой электрические потери в обмотке ротора Р эP , если пренебречь потерями в стали ротора в виду их незначительности (частота перемагничивания ротора обычно очень мала):
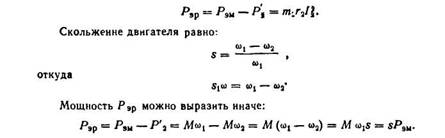
Следовательно, потери в обмотке ротора пропорциональны скольжению ротора.
Если из механической мощности развиваемой ротором, вычесть механические потерн Р мх обусловленные трением в подшипниках ротора, трением о воздух и т. п., а также добавочные потери Р Д, возникающие при нагрузке и обусловленные полями рассеяния ротора, и потери, вызываемы: пульсациями магнитного поля в зубцах статора и ротора, то останется полезная мощность на валу двигателя, которую обозначим через P 2 .
К. п. д. асинхронного двигателя может быть определен по формуле:

Из последнего выражения видно, что момент вращения асинхронного двигателя пропорционален произведению из величины вращающегося магнитного потока, тока ротора и косинуса угла между э. д. с. ротора и его током,

Из схемы замещения асинхронного двигателя получается величина приведенного тока ротора, которую мы приводим без доказательства.
Момент, развиваемый двигателем равен электромагнитной мощности, деленной на синхронную скорость вращения электропривода.
M = P эм /ω 0
Электромагнитная мощность – это мощность, передаваемая через воздушный зазор от статора к ротору, и она равна потерям в роторе, которые определяются по формуле:
P эм = m I 2 2 (r 2 ’/s)
m – число фаз.
M = M эм = (Pm/ω 0) (I 2 ’) 2 (r 2 ’/s)
Электромеханической характеристикой асинхронного двигателя является зависимость I2’ от скольжения. Но так как асинхронная машина работает только в качестве электродвигателя, основной характеристикой является механическая характеристика.
M = Mэ м = (Pm/ω 0) (I 2 ’) 2 (r 2 ’/s) – упрощенное выражение механической характеристики.
Подставив в это выражение значение тока, получим: M = / [ω 0 [(r 1 + r 2 ’/s) 2 + (x 1 + x 2 ’) 2 ]]
Вместо ω 0 нужно подставить механическую скорость, в результате чего число пар полюсов сокращается.
M = / [ω 0 [(r 1 + r 2 ’/s) 2 + (x 1 + x 2 ’) 2 ]] – это уравнение механической характеристики асинхронного двигателя.
При переходе асинхронного двигателя в генераторный режим, скорость вращения ω > ω 0 и скольжение становится отрицательным (s Когда скольжение изменяется от 0 до +∞, режим называется «режимом электромагнитного тормоза».
Задаваясь значениями скольжения от о до +∞, получим характеристику:
Полная механическая характеристика асинхронного двигателя.
Как видно из механической характеристики, она имеет два экстремума: один на отрезке изменения скольжения на участке от 0 до +∞, другой на отрезке от 0 до -∞. dM/ds=0
M max = / ] + относится к двигательному режиму. – относится к генераторному режиму.
M max =M кр M кр – критический момент.
Скольжение, при котором момент достигает максимума, называется критическим скольжением, и оно определяется по формуле: s кр = ±
Критическое скольжение имеет одинаковое значение и в двигательном и в генераторном режимах.
Величину M кр можно получить, подставив в формулу момента значение критического скольжения.
Момент при скольжении равном 1 называется пусковым моментом. Выражение для пускового момента можно получить, подставив 1 в формулу:
M п = / [ω 0 [(r 1 + r 2 ’) 2 + (x 1 + x 2 ’) 2 ]]
Поскольку знаменатель в формуле момента максимального на несколько порядков больше U ф, принято считать M кр ≡U ф 2 .
Критическое скольжение зависит от величины активного сопротивления обмотки ротора R 2 ’. Момент пусковой, как видно из формулы, зависит от активного сопротивления ротора r 2 ’. это свойство пускового момента используется в асинхронных двигателях с фазным ротором, у которых пусковой момент увеличивают путем введения активного сопротивления в цепь ротора.
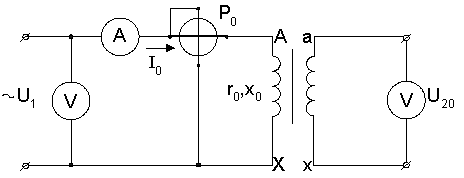
7.Холостой ход трансформатора
Режимом
холостого хода трансформатора называют
режим работы при питании одной из обмоток
трансформатора от источника с переменным
напряжением и при разомкнутых цепях
других обмоток. Такой режим работы может
быть у реального трансформатоpa, когда
он подключен к сети, а нагрузка, питаемая
от его вторичной обмотки, еще не включена.
По первичной обмотке трансформатора
проходит ток I 0 ,
в то же время во вторичной обмотке тока
нет, так как цепь ее разомкнута. Ток I 0 ,
проходя по первичной обмотке, создает
в магнитопроводе синусоидально
изменяющийся лоток Ф 0 ,
который из-за магнитных потерь отстает
по фазе от тока на угол потерь δ.
На величину вращающего момента асинхронного двигателя большое влияние оказывает сдвиг фаз между током I 2 и э. д. с. E 2S ротора.
Рассмотрим случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз можно пренебречь (фиг. 223, а).
Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающихся, предположим, по направлению часовой стрелки. Пользуясь правилом правой руки, определяем направление э. д. с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу левой руки. Как видно из чертежа, ротор под действием сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
Рассмотрим второй случай, когда индуктивность обмотки ротора велика. В этом случае сдвиг фаз между током ротора I 2 и э. д. с. ротора Е 2S будет также большим. На фиг. 223, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э. д. с. остается таким же, как и на фиг. 223, а, но вследствие запаздывания тока по фазе ось магнитного поля ротора не будет уже совпадать с нейтральной линией поля статора, а сместится на некоторый угол против вращения магнитного поля. Это приведет к тому, что наряду с образованием вращающего момента, направленного в одну сторону, некоторые проводники создадут встречный вращающий момент.
Отсюда видно, что общий вращающий момент двигателя при сдвиге фаз между током и э. д. с. ротора меньше, чем для случая, когда I 2 и Е 2S совпадают по фазе. Можно доказать, что вращающий момент асинхронного двигателя обусловливается только активной слагающей тока ротора, т. е. током I 2 cos и что он может быть вычислен по формуле:
Ф m -магнитный поток статора (а также приближенно равный результирующему магнитному потоку асинхронного двигателя);
Угол сдвига фаз между э. д. с. и током фазы обмотки
С - постоянный коэффициент.
После подстановки:
Из последнего выражения видно, что вращающий момент асинхронного двигателя зависит от скольжения.
На фиг. 224 изображена кривая А зависимости вращающего момента двигателя от скольжения. Из кривой видно, что в момент пуска, когда s=l и n = 0, вращающий момент двигателя невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos имеет малое значение (по-
|
рядка 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет небольшим.
При некотором скольжении S 1 вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения или, иначе говоря, при даль, нейшем увеличении скорости вращения двигателя его момент будет быстро умень-
Шаться и при скольжении s = 0 момент вращения двигателя бу- дет также равен нулю.
Следует оговориться, что у асинхронного двигателя скольжение, равное нулю, практически быть не может. Это возможно лишь в том случае, если ротору сообщить извне вращающий момент в сторону вращения поля статора.
Пусковой момент можно увеличить, если в момент пуска уменьшить сдвиг фаз между током и э. д. с. ротора. Из формулы
видно, что если при постоянном индуктивном сопротивлении обмотки ротора увеличить активное сопротивление, то и сам угол будут уменьшаться, что приведет к тому, что и вращающий момент двигателя станут больше. Этим пользуются на практике для увеличения пускового вращающего момента двигателя. В момент пуска в цепь ротора вводят активное сопротивление (пусковой реостат), которое затем выводят, как только двигатель увеличит скорость.
Увеличение пускового момента приводит к тому, что максимальный вращающий момент двигателя получается при большем скольжении (точка S 2 кривой B на фиг. 224). Путем увеличения активного сопротивления цепи ротора при пуске можно добиться того, что максимальный вращающий момент будет в момент пуска (s = 1 кривой С).
Вращающий момент асинхронного двигателя пропорционален квадрату напряжения, поэтому даже небольшое уменьшение напряжения сопровождается резким уменьшением вращающего момента.
Мощность P 1 , подводимая к обмотке статора асинхронного двигателя, равна:
![]()
где m 1 - число фаз.
В статоре двигателя имеются следующие потери энергии:
1) в обмотке статора Р эс. =m 1 I 1 2 r 1 ;
2) в стали статора иа гистерезис и вихревые токи Р C .
Мощность, подводимая к ротору, представляет собой мощность вращающегося магнитного поля, называемую также электромагнитной мощностью Р эM .
Электромагнитная мощность равна разности между подводимой к двигателю мощностью и потерями в статоре двигателя, т. е.
|
Разность между Р эM и представляет собой электрические потери в обмотке ротора Р эP , если пренебречь потерями в стали ротора в виду их незначительности (частота перемагничивания ротора обычно очень мала):
Следовательно, потери в обмотке ротора пропорциональны скольжению ротора.
Если из механической мощности развиваемой ротором, вычесть механические потерн Р мх обусловленные трением в подшипниках ротора, трением о воздух и т. п., а также добавочные потери Р Д, возникающие при нагрузке и обусловленные полями рассеяния ротора, и потери, вызываемы: пульсациями магнитного поля в зубцах статора и ротора, то останется полезная мощность на валу двигателя, которую обозначим через P 2 .
К. п. д. асинхронного двигателя может быть определен по формуле:
Из последнего выражения видно, что момент вращения асинхронного двигателя пропорционален произведению из величины вращающегося магнитного потока, тока ротора и косинуса угла между э. д. с. ротора и его током,
Из схемы замещения асинхронного двигателя получается величина приведенного тока ротора, которую мы приводим без доказательства.