Sähkömuuntimia on useita luokkia, joista yksi käytännön käyttöä löysi niin sanotut induktiiviset analogit. Niissä energian muuntaminen tapahtuu käämien induktion muuntamisen vuoksi, jotka ovat olennainen osa itse yksikköä. Käämit sijaitsevat kahdessa elementissä - staattorissa ja roottorissa. Joten, mitä eroa on staattorilla ja roottorilla (mitä ne ovat ja mitkä ovat niiden tehtävät?).
Tällä tavalla sähköinen huippukuorma pienenee kolmannekseen, energiankulutus pysyy ennallaan. Sähkön ostajat, kuten huvipuistot, veloitetaan yleensä enimmäiskuormituksensa mukaan Euroopassa ja voivat vähentää käyttökustannuksiaan merkittävästi varastoimalla energiaa. Lähteenä hän käytti 320 galvaanisen kennon sarjaa. Akun korkean hinnan vuoksi hänen täytyi lopettaa yrittäminen. Nykyään emme tule toimeen ilman sähkömoottoreita, niitä käytetään melkein kaikkialla.
Yksinkertaisin määritelmä anturin kahdesta osasta on niiden toiminnallisuus. Kaikki on täällä yksinkertaista: staattori (sähkömoottori tai generaattori) on kiinteä osa, roottori on liikuteltava. Useimmissa tapauksissa jälkimmäinen sijaitsee entisen sisällä, ja niiden välillä on pieni rako. On olemassa niin sanottuja yksiköitä, joissa on ulkoroottori, joka on pyörivä rengas, jonka sisällä on kiinteä staattori.
Sähkömoottorit ovat koneita, jotka muuntavat sähköenergiaa mekaaniseen energiaan. Energiaa menee hukkaan Joule-lämmössä, Foucault-virroissa, hystereesissä, kipinöissä jne. jokainen sähkömoottori koostuu kiinteästä osasta, jota kutsutaan staattoriksi, ja liikkuvasta osasta, jota kutsutaan roottoriksi tai ankkuriksi, joka pyörii staattorin sisällä. ohittaa sähköä staattorikäämin ja roottorikäämin kautta muodostuu kaksi magneettikenttää, jotka vuorovaikuttavat toistensa kanssa houkuttelevilla ja hylkivillä voimilla siten, että roottori pyörii.
Induktiomoottorit ovat eniten käytettyjä moottoreita. Staattori on onton sylinterin muotoinen, joka koostuu noin 0,5 mm paksuista erikoislevyistä, jotka on eristetty maalilla tai maalilla. Staattorin kehän ympärillä oleviin uriin on järjestetty kolmikierroseristys eristettyjä kupari- tai alumiinijohtimia, joiden läpi kulkee kolmivaiheinen vaihtovirta. Roottori koostuu samoista levyistä ja on muodoltaan täyssylinteri. Sen pinnalla on uria ja kolmivaiheinen käämitys, kuten staattorin käämitys, tai paljaat kuparitangot työnnetään uriin, jotka on yhdistetty molemmista päistä kuparirenkailla.
Muuntimien tyypit
Miksi on niin tärkeää ottaa huomioon näkemykset, jotta voidaan ymmärtää, kuinka sähkömoottorin staattori eroaa liikkuvasta osastaan. Koko pointti on se suunnitteluominaisuuksia sähkömoottoreissa on paljon, sama koskee generaattoreita (nämä ovat muuntajia mekaaninen energia sähkömoottoreilla on päinvastainen toiminnallisuus).
Ankkurikäämit on valmistettu erittäin johtavista metallitangoista, jotka kiinnitetään lyhyesti ankkurin päihin. Käämitys muistuttaa häkkiä ja sitä kutsutaan ankkurina tai ankkurina. Staattorin pyörivä magneettikenttä aiheuttaa merkittäviä virtoja ankkurikäämitykseen. Lenzin lain mukaan niitä on magneettisia voimia vaikuttavat ankkurijohtimiin, ja ankkuri pyörii pyörimissuuntaan magneettikenttä. Roottori ei kuitenkaan voi pyöriä samalla taajuudella kuin kenttä. Sanomme, että hänellä on selvä ikävä.
Roottorin nopeuden kasvaessa ero roottorin nopeudessa ja pyörivässä magneettikentässä kuitenkin pienenee vähitellen, mutta myös induktiivisten linjojen köyden risteysnopeus pienenee, mikä vähentää pyörivän magneettisen indusoituvaa virtaa ja voimavaikutuksia. kenttä, eikä roottorin nopeus tietystä hetkestä enää kasva. Roottori ei kulje samansuuntaisesti pyörivän magneettikentän kanssa.

Joten sähkömoottorit jaetaan AC- ja tasavirta. Ensimmäiset puolestaan jaetaan synkronisiin, asynkronisiin ja keräilijöihin. Edellisessä staattorin ja roottorin pyörimiskulmanopeus on sama. Toisessa nämä kaksi indikaattoria ovat eriarvoisia. Kokoojatyypeissä on ns. taajuusmuuttaja ja suunnittelussa mekaanisen tyyppinen vaihemäärä, jota kutsutaan kollektoriksi. Tästä syystä yksikön nimi. Hän on suoraan yhteydessä moottorin roottorin ja sen staattorin käämiin.
Kolmivaiheinen animaatio induktiomoottori. Alumiini ei ole ferromagneettinen materiaali, joten sen pyörimistä ei voida selittää samalla tavalla kuin magneetin pyörimistä. Pyörivässä magneettikentässä alumiinisylinterin eri osiin indusoituu erilaisia jännitteitä. Sylintereihin aletaan kohdistua niin sanottuja pyörrevirtoja, jotka pyörivässä magneettikentässä muodostavat sylinteriä pyörittävän voiman. Tämä on mitä suurempi, sitä suurempi moottorin nopeus on hitaampi kuin pyörivän magneettikentän nopeus.
Tästä syystä se on oikosulkumoottori, jonka moottorilla ei ole synkronista nopeutta. Sen nopeus vaihtelee kuorman mukaan. Vaihtamalla kaksivaiheisia johtoja moottorin liittimissä pyörivän kentän pyörimissuunta vaihtuu ja moottori pyörii vastakkaiseen suuntaan. Suunnittelun mukaan oikosulkumoottorit voidaan muunnella yksivaiheisiksi induktiomoottoreiksi, jotka sopivat pieniin laitteisiin, kuten pesukoneisiin.
Roottorin tasavirtakoneissa on sama kollektori. Mutta generaattoreiden tapauksessa se suorittaa muuntimen toimintoja ja sähkömoottoreiden tapauksessa invertterin toimintoja.
Jos sähköyksikkö on kone, jossa vain roottori pyörii, niin sen nimi on yksiulotteinen. Jos kaksi elementtiä pyörii samanaikaisesti vastakkaisiin suuntiin, tätä laitetta kutsutaan kaksiulotteiseksi tai birotatiiviseksi.
Kolmivaihevirtojen suuri käytännön merkitys mahdollistaa yksinkertaisten ja tehokkaiden sähkömoottoreiden suunnittelun, jotka muuttavat sähköenergian mekaaniseksi energiaksi. Ne perustuvat johtimien liikkeeseen, joiden läpi sähkövirta kulkee magneettikentässä, jota ohjaa staattorikäämin virta.
Harkitse tilannetta kuvassa. Kolme kelaa, joiden akselit ovat kulmassa toisiinsa nähden ja joiden käämit on yhdistetty tähteen. Nämä kelat on kytketty kolmivaiheiseen jännitteeseen toisesta lähteestä. Kelojen läpi kulkeva virta luo magneettikentän niiden väliin. Jos laitamme magneetin tähän kenttään, se alkaa pyöriä samalla taajuudella kuin vaihtovirta. Magneetti pyörii synkronisesti magneettikentän kanssa. Magneettikentän rotaatio on magneettikenttä, jonka magneettinen induktiovektori muuttuu jaksottaisesti. Täällä on pyörivä magneettikenttä.
Asynkroniset moottorit
Moottorin roottorin ja sen staattorin käsitteiden ymmärtämiseksi on otettava huomioon yksi sähkömuunnoskoneiden tyypeistä. Koska asynkronisia sähkömoottoreita käytetään useimmiten tuotantolaitteissa ja kodinkoneet, niin niitä kannattaa harkita.

Magneettisen induktiovektorin loppupiste liikkuu ympyrässä. Kuvassa 186 näyttää kelan virran ajoituksen pyörivän magneettikentän ylä- ja alaosassa. Vastaavasti voit löytää induktiolinjojen suunnan muissakin aikapisteissä. Kolmivaiheinen sähkömoottori on kaksi pääosaa.
Staattori - sen rakenne on samanlainen kuin generaattorin staattori. Roottori - teräslevyistä valmistettu sylinteri, jossa on urat, joihin käämi on asennettu. Käytetään ns. erotinkäämitystä, joka syntyy esimerkiksi kaatamalla sulaa alumiinia uriin. Sen jähmettyminen muodostaa johtavan häkin vahvoista alumiinitangoista, jotka on yhdistetty roottorin päähän alumiinirenkailla. Ankkurikäämin vastus on mitätön ja moottoria, jossa on tämän tyyppinen roottori, kutsutaan lyhythihaiseksi moottoriksi.
Joten mikä on asynkroninen moottori? Tämä on yleensä valurautakotelo, johon magneettipiiri painetaan. Siihen tehdään erityisiä uria, joihin kuparilangasta koottu staattorikäämi sopii. Urat ovat siirtyneet toisiinsa nähden 120º, joten niitä on vain kolme. Ne muodostavat kolme vaihetta.
Roottori puolestaan on teräslevyistä (meistetty sähköteräs) koottu ja teräsakselille asennettu sylinteri, joka puolestaan asennetaan laakereihin sähkömoottoria koottaessa. Riippuen siitä, miten yksikön vaihekäämit on koottu, moottorin roottorit voivat olla vaihe- tai oikosulkuja.
Roottorissa ei ole johtimia. Tämä roottori näyttää Ježekin häkiltä häkissä, mysteeri, joka esiintyy Jaroslav Foglarin kirjoissa. Ankkurin pienestä resistanssista johtuen pyörivä magneettikenttä indusoi käämiin suuria virtoja. Tämä johtaa suureen magneettiseen voimaan, joka saa roottorin pyörimään. Ankkuri ei kuitenkaan pyöri pyörivän magneettikentän taajuudella. Jos näin olisi, virran indusoima käämin magneettivuo ei muuttuisi ja siten pyörimisen syy katoaisi.
On välttämätöntä, että ankkuri liikkuu suhteessa pyörivään magneettikenttään, ts. "Tunne" ei-stationaarista magneettikenttää. Jos se pyöri synkronisesti, se "tunti" paikallaan olevan kentän. Jos roottorina käytetään magneettia, synkroninen pyöriminen tapahtuu synkronisen moottorin luomiseksi.
- Vaiheroottori on sylinteri, johon on koottu kelat, jotka on siirretty toisiinsa nähden 120º. Samanaikaisesti sen suunnitteluun on asennettu kolme liukurengasta, jotka eivät kosketa akselia tai toisiaan. Toisella puolella renkaisiin on kiinnitetty kolmen käämin päät ja toisella grafiittiharjat, jotka ovat liukuvassa kosketuksessa renkaisiin nähden. Esimerkki tällaisesta koneesta on nosturimoottorit, joissa on vaiheroottori.
- Oravahäkkiroottori on koottu kuparitangoista, jotka sopivat uriin. Samanaikaisesti ne on yhdistetty erityisellä kuparista valmistetulla renkaalla.
Toisin kuin magneetin synkronisessa pyörimisessä, sähkömoottorin kolmivaiheinen ankkuri pyörii aina pienemmällä taajuudella, ns. asynkronisesti. Näitä moottoreita kutsutaan kolmivaiheisiksi asynkronimoottoreiksi. Arvo, joka on ominaista asynkroninen moottori, kutsutaan luistoksi c ja se määräytyy suhteessa, jossa pyörivän mg:n pyörimisnopeus. kenttä ja roottorin nopeus. Poikkeama voidaan ilmaista prosentteina.
Jos ankkuri ei ylitä vastusta pyörimisen aikana, eli laitteen ollessa valmiustilassa, luisto on pieni ja ankkurikäämi kulkee pienen virran läpi. Kun moottoria kuormitetaan, luisto kasvaa, käämitys indusoi enemmän virtaa ja roottorin pyöriminen ylläpidetään suuremmalla magneettisella voimalla.
Toisin kuin magneetin synkronisessa pyörimisessä, sähkömoottorin kolmivaiheinen ankkuri pyörii aina pienemmällä taajuudella, ns. asynkronisesti. Näitä moottoreita kutsutaan kolmivaiheisiksi asynkronimoottoreiksi. Asynkronisen sähkömoottorin arvoominaiskäyrää kutsutaan jättämäksi c ja se määräytyy sen suhteen, jolla pyörimisnopeus pyörii mg. kenttä ja roottorin nopeus. Poikkeama voidaan ilmaista prosentteina.
Vaiheroottorilla varustettu asynkroninen sähkömoottori on suurten mittojen ja painon omistaja. Mutta sillä on erinomaiset ominaisuudet käynnistyksen ja vääntömomenttien säädön suhteen. Moottoreita, joissa on oravahäkkiroottori, pidetään nykyään luotettavimpana. Ne ovat suunnittelultaan yksinkertaisia ja siksi halpoja. Niiden ainoa haittapuoli on suuri käynnistysvirta, jota nyt torjutaan yhdistämällä staattorin käämit tähdestä kolmioon. Eli käynnistys tehdään, kun se on yhdistetty tähdellä, kierrossarjan jälkeen kytkin tehdään kolmioon.
Aiheeseen liittyvät julkaisut: 
Sähkötuotteen (laitteen) käämitys - tietyllä tavalla järjestetty ja kytketty kierros tai kela, joka on suunniteltu luomaan tai käyttämään magneettikenttää tai saamaan sähkötuotteen (laitteen) tietyn resistanssiarvon.Sähkötuotteen (laitteen) käämi - sähkötuotteen (laitteen) tai sen osan käämi, joka on tehty erilliseksi rakenneyksiköksi(GOST 18311-80).
Artikkeli kertoo staattorin ja roottorin käämien laitteesta sähkökoneet vaihtovirta.
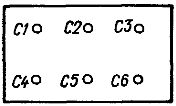
Staattori, jossa on kaksitoista uraa, joista jokainen sisältää yhden johtimen, on esitetty kaavamaisesti kuvassa. 1, a. Uriin asetettujen johtimien väliset liitännät on merkitty vain yhdelle kolmesta vaiheesta; käämin vaiheiden A, B, C alku on merkitty C1, C2, C3; päät - C4, C5, C6. Uriin asetettavat käämin osat (käämin aktiivinen osa) on perinteisesti esitetty tankoina ja urien johtimien väliset liitännät (päätyliitokset) on esitetty yhtenäisenä viivana.
Staattorisydän on muodoltaan ontto sylinteri, joka on paketti tai pakettisarja (erotettu ilmanvaihtokanavista) sähköteräslevyistä. Pienen ja keskisuuren tehon koneissa jokainen levy on meistetty renkaan muodossa, jossa on uria sisäkehällä. Kuvassa Kuvio 1b esittää staattorilevyä, jossa on jonkin käytetyn muodon mukaiset urat.
Riisi. 1. Käämin sijainti staattorin rakoissa ja virtojen jakautuminen johtimissa
Olkoon ensimmäisen vaiheen virran iA hetkellinen arvo jossain vaiheessa maksimi ja virta suunnattu C1-vaiheen alusta sen loppuun C4. Pidämme tätä virtaa positiivisena.
Määrittämällä vaiheiden hetkelliset virrat pyörivien vektorien projektioksina kiinteälle akselille ON (kuva 1, c), havaitaan, että vaiheiden B ja C virrat ovat tietyllä hetkellä negatiivisia, eli ne on suunnattu päistä. vaiheista alkuun.
Noudatetaan kuvaa. 1, d pyörivän magneettikentän muodostuminen. Tarkastetulla ajanhetkellä vaiheen A virta on suunnattu alusta loppuun, eli jos se johtimissa 1 ja 7 menee meiltä piirustuksen tason ulkopuolelle, niin johtimissa 4 ja 10 se menee johtimien takaa. piirustuksen taso meille (katso kuva 1, a ja d).
Vaiheessa B virta kulkee tällä hetkellä vaiheen lopusta sen alkuun. Kytkemällä toisen vaiheen johtimet ensimmäisen mallin mukaan saadaan aikaan, että vaiheen B virta kulkee johtimien 12, 9, 6, 3; samaan aikaan johtimien 12 ja 6 kautta virta kulkee meistä piirustuksen tason yli ja johtimien 9 ja 3 kautta - meille. Kuva vaiheen C virtojen jakautumisesta saadaan vaiheen B näytteen mukaan.
Virtojen suunnat on esitetty kuvassa. 1,d; katkoviivat osoittavat staattorivirtojen synnyttämän kentän magneettiset viivat; linjojen suunnat määräytyvät oikean ruuvin säännön mukaan. Kuvasta nähdään, että johtimet muodostavat neljä ryhmää, joilla on samat virtasuunnat ja magneettijärjestelmän napojen lukumäärä 2p on neljä. Staattorin alueet, joilla magneettiviivat lähtevät siitä, ovat pohjoisnavat, ja alueet, joissa magneettiviivat tulevat staattoriin, ovat etelänavat. Staattoriympyrän kaarta, jossa on yksi napa, kutsutaan napajakoksi.
Magneettikenttä staattorin kehän eri kohdissa on erilainen. Kuva magneettikentän jakautumisesta staattorin kehällä toistetaan ajoittain jokaisen kaksoisnapajaon 2τ jälkeen; kaarikulma 2τ otetaan 360 sähköasteeksi. Koska staattorin kehällä on p kaksinapajakoa, 360 geometristä astetta vastaa 360p sähköastetta ja yksi geometrinen aste on yhtä suuri kuin p sähköastetta.
Kuvassa 1d näyttää magneettiset viivat tietyn kiinteän ajan. Jos tarkastelemme magneettikentän kuvaa useiden peräkkäisten ajankohtien ajan, voimme nähdä, että kenttä pyörii vakionopeudella.
Selvitetään kentän pyörimisnopeus. Puolet vaihtovirran jaksosta vastaavan ajan kuluttua kaikkien virtojen suunnat muuttuvat päinvastaisiksi, joten magneettinapat vaihtavat paikkoja, eli puolessa jaksossa magneettikenttä pyörii kierroksen osan verran, joka on yhtä suuri kuin 1 /2ρ. Yhdessä vaihtovirtajaksossa kenttä pyörii 1/ρ kierroksen verran. Sitten yhdessä sekunnissa kenttä tekee 1/ρ kierrosta, missä f on vaihtovirran taajuus. Siksi staattorin magneettikentän pyörimisnopeus, eli synkroninen nopeus, on (kierroksina minuutissa)
Napaparien lukumäärä p voi olla vain kokonaisluku, joten esimerkiksi taajuudella 50 Hz synkroninen nopeus voi olla 3000; 1500; 1000 rpm jne.
Riisi. 2. Yksityiskohtainen kaavio kolmivaiheisesta yksikerroksisesta käämityksestä
Käämityksen suorituskyvyn määrittävä tunnusmerkki on rakojen lukumäärä napaa ja vaihetta kohti, eli kunkin vaiheen käämityksen varaamien rakojen määrä yhden napajaon sisällä:
missä z on staattoripaikkojen lukumäärä.
Kuvassa näkyvä käämitys. 1a sisältää seuraavat tiedot:
Jopa tälle yksinkertaisimmalle käämitykselle johtimien ja niiden liitäntöjen tilapiirustus osoittautuu monimutkaiseksi, joten se korvataan yleensä laajennetulla kaaviolla, jossa käämitysjohtimet ei ole esitetty sijoitettuina sylinterimäiselle pinnalle, vaan tasolle (a. sylinterimäinen pinta, jossa on uria ja käämi "avautuu" tasoon). Kuvassa Kuvassa 2 on esitetty yksityiskohtainen kaavio tarkasteltavasta staattorikäämityksestä.
Edellisessä kuvassa osoitettiin yksinkertaisuuden vuoksi, että osa käämin vaiheesta A, joka on sijoitettu uriin 1 ja 4, koostuu vain kahdesta johtimesta, eli yhdestä kierrosta. Todellisuudessa kukin tällainen käämin osa yhtä napaa kohti koostuu w kierrosta, eli jokainen rakopari sisältää w yhdeksi kelaksi yhdistettyä johdinta. Siksi, kun ohitetaan laajennetussa kaaviossa, esimerkiksi vaihe A paikasta 1, sinun on ohitettava paikat 1 ja 4 w kertaa ennen kuin siirrytään paikkaan 7. Yhden kelan kierron sivujen välinen etäisyys tai käämi sävelkorkeus, y on esitetty kuvassa. 1, d; se ilmaistaan yleensä aikavälien lukumääränä.
Riisi. 3. Suojaa asynkroninen kone
Näkyy kuvassa Kuvissa 1 ja 2 staattorikäämitystä kutsutaan yksikerroksiseksi, koska se sopii jokaiseen uraan yhdessä kerroksessa. Jotta etuosat leikkaavat tasossa, ne taivutetaan eri pintoja pitkin (kuva 2, b). Yksikerroksiset käämit valmistetaan napajakoa vastaavalla askelmalla y = τ: (Kuva 2, a) tai tämä askel on yhtä suuri kuin saman vaiheen eri kelojen keskimääräinen napajako, jos y > 1 , y . Tällä hetkellä kaksikerroksiset käämit ovat yleisempiä.
Käämityksen kunkin kolmen vaiheen alku ja loppu näkyvät koneen kilvessä, jossa on kuusi puristinta (kuva 3). Kolme lineaarista johtoa kolmivaiheinen verkko. Alemmat kiinnikkeet C4, C5, C6 (vaiheen päät) on joko yhdistetty yhdestä pisteestä kahdella vaakasuuntaisella siltauksella tai kumpikin näistä kiinnikkeistä on yhdistetty pystysuoralla hyppyjohdolla sen yläpuolella olevaan ylempään puristimeen.
Ensimmäisessä tapauksessa staattorin kolme vaihetta muodostavat tähtikytkennän, toisessa tapauksessa kolmioliitoksen. Jos esimerkiksi yksi staattorin vaihe on suunniteltu 220 V jännitteelle, niin verkkojännite verkon, johon moottori on kytketty, on oltava 220 V, jos staattori on kytketty päälle kolmiolla; kun se kytketään päälle tähdellä, verkon linjajännitteen on oltava
![]()
Kun staattori kytketään tähdellä, nollajohdinta ei toimiteta, koska moottori on symmetrinen verkkokuorma.
Asynkronisen koneen roottori kootaan eristetyistä sähköteräslevyistä akselille tai erityiselle tukirakenteelle. Staattorin ja roottorin välinen säteittäinen rako tehdään mahdollisimman pieneksi, jotta varmistetaan pieni magneettivastus koneen molempiin osiin tunkeutuvan magneettivuon tiellä.
Pienin teknisten vaatimusten sallima rako on millimetrin kymmenesosista useisiin millimetreihin koneen tehosta ja mitoista riippuen. Roottorin käämityksen johtimet on sijoitettu uriin roottorin generaattoreita pitkin suoraan sen pinnalle, jotta roottorin käämityksen ja pyörivän kentän välinen yhteys saadaan mahdollisimman hyvin.
Asynkronisia koneita valmistetaan sekä vaiheella että kanssa oravahäkkiroottori.

Riisi. 4. Vaiheroottori
Vaiheroottorissa on pääsääntöisesti kolmivaiheinen käämitys, suoritetaan kuten staattori, samalla määrällä napoja. Käämitys on yhdistetty tähdellä tai kolmiolla; käämityksen kolme päätä tuodaan ulos kolmeen eristettyyn liukurenkaaseen, jotka pyörivät koneen akselin mukana. Koneen kiinteään osaan asennettujen ja liukurenkaita pitkin liukuvien harjojen kautta roottoriin sisällytetään kolmivaiheinen käynnistys- tai säätöreostaatti, eli aktiivinen vastus tuodaan roottorin jokaiseen vaiheeseen. Ulkomuoto vaiheroottori on esitetty kuvassa. 4, kolme liukurengasta näkyy akselin vasemmassa päässä. Vaiheroottorilla varustettuja asynkronisia moottoreita käytetään silloin, kun vaaditaan käytettävän mekanismin tasaista nopeudensäätöä sekä moottorin usein käynnistyessä kuormitettuna.
Oravahäkkiroottorin rakenne on paljon yksinkertaisempi kuin vaiheroottorin. Yhdelle kuvan rakenteista. Kuviossa 5 on esitetty niiden levyjen muoto, joista roottorin sydän on koottu. Tässä tapauksessa kunkin levyn ulkokehän lähellä olevat reiät muodostavat pitkittäisiä uria ytimeen. Näihin uriin kaadetaan alumiinia, jonka kovettumisen jälkeen roottoriin muodostuu pitkittäisiä johtavat sauvat. Roottorin molemmissa päissä on samanaikaisesti valettu alumiinirenkaat, jotka oikosulkevat alumiinitangot. Tuloksena olevaa johtavaa järjestelmää kutsutaan yleensä oravahäkkiksi.
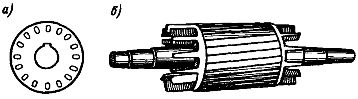
Riisi. 5. Oravahäkkiroottori
Orava-häkki-orava-häkkiroottori on esitetty kuvassa. 5 B. Roottorin päissä näkyvät tuuletussiivet, jotka on valettu kiinteästi oikosulkurenkaiden kanssa. Tässä tapauksessa raot on viistetty yhdellä urajaolla roottoria pitkin. Oravahäkki on yksinkertainen, siinä ei ole liukukoskettimia, joten kolmivaiheiset asynkroniset moottorit, joissa on oravahäkkiroottori, ovat halvimpia, yksinkertaisimpia ja luotettavimpia; ne ovat yleisimpiä.





