Двигатель постоянного тока (ДПТ)
Устройство:
1. Статор (индуктор).
2. Ротор (якорь).
В статор входит: корпус, магнитопровод в виде полюсов, на которых расположена обмотка возбуждения.
Индуктором называют ту часть машины, которая предназначена для создания магнитного поля.
В ротор входит: вал, магнитопровод, в пазах которого расположена обмотка, и коллектор со щетками.
Условное обозначение:

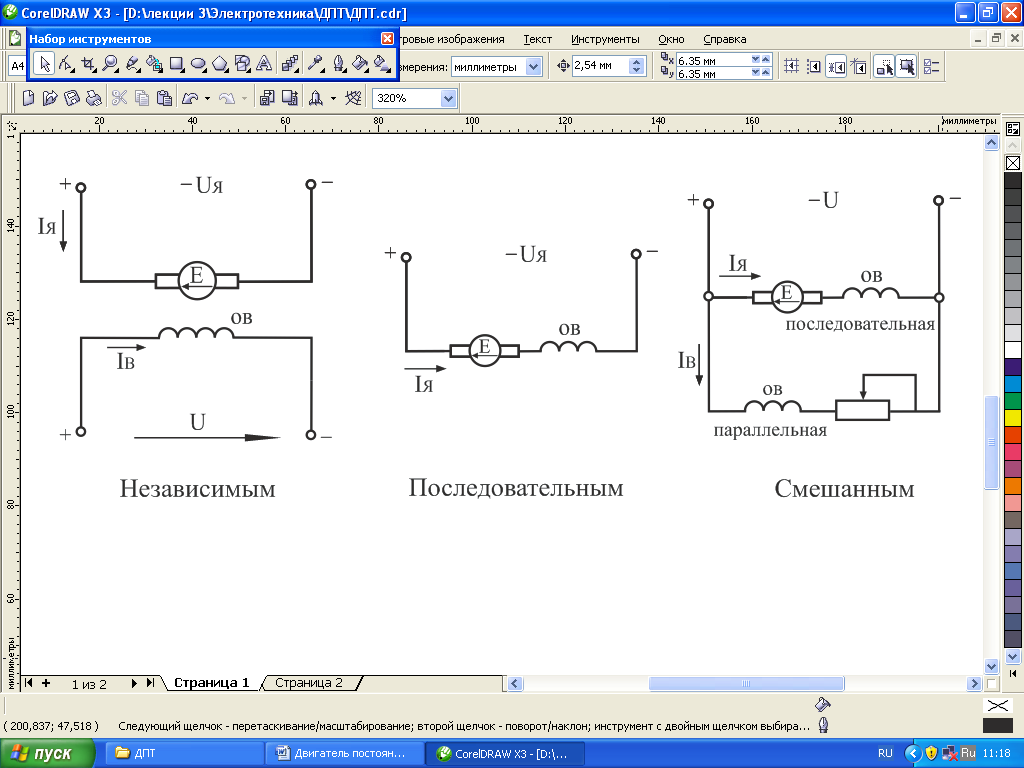
Схемы ДПТ с различными типами возбуждения:
Принцип работы:
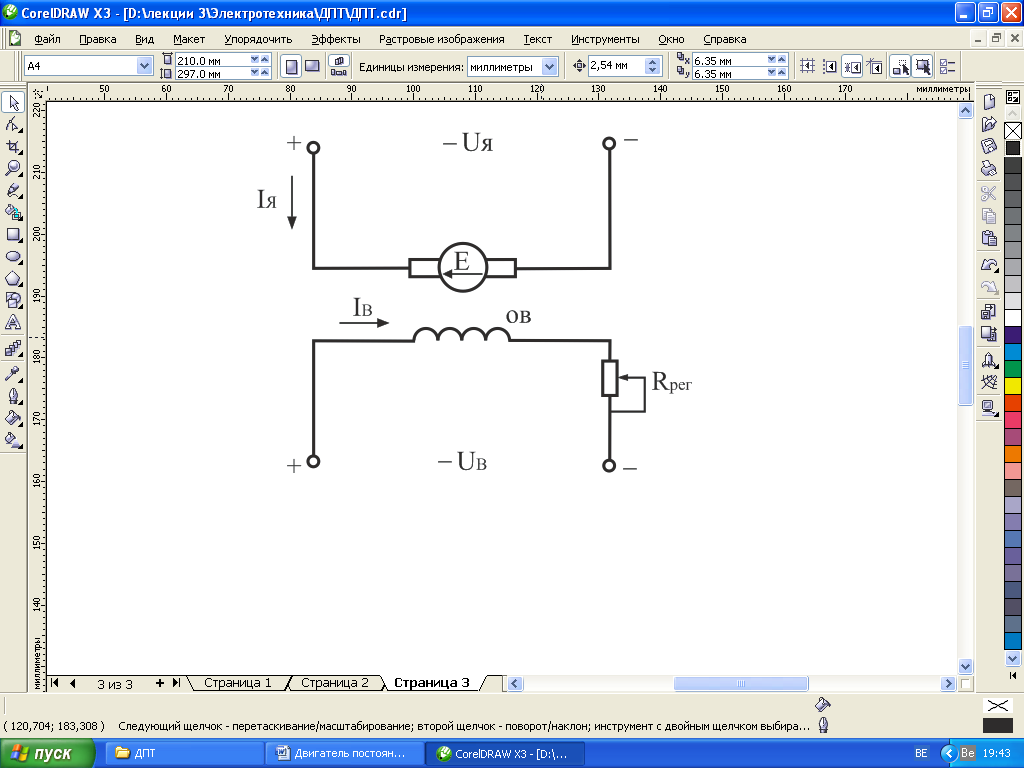
U В → I В → Ф;
где I В - ток возбуждения; I Я - ток якоря.
Взаимодействие тока якоря с магнитным потоком Ф статора создает вращающий момент :
где С М - конструктивный коэффициент.
Под действием М ротор начинает вращаться, пересекая при этом силовые линии магнитного поля, вследствие чего в нем индуктируется ЭДС, которую называют ЭДС вращения:
Основные уравнения ДПТ:
Ими являются уравнения электрического равновесия ротора:
где - падение напряжения в цепи якоря;- ЭДС вращения.
Из этой формулы получаем практически важное соотношение:
Подставим вместо
И получим:
![]() .
.
По этому выражению можно построить механическую характеристику ДПТ n = f(M), задаваясь нагрузкой, т. е. М, можно найти соответствующую ей частоту вращения. Если при этом U = U ном, Ф = Ф ном имеем естественную механическую характеристику.
Механическая характеристика ДПТ:
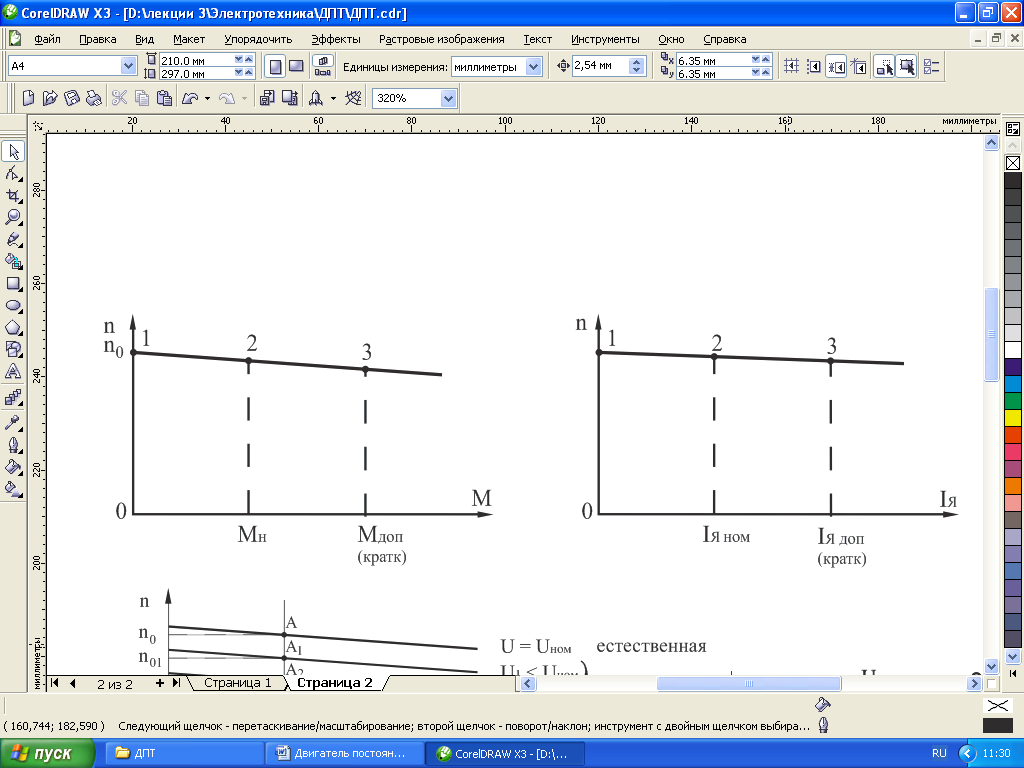
Точка «1» - холостой ход; координаты М = 0, n = n 0 ;
«2» - номинальный режим; координаты М н, n н;
«3» - предельно-допустимая кратковременная нагрузка.
Участок 1–2 - допустимая длительная работа.
Участок 2–3 - допустимая только кратковременная работа.
Обычно I я доп =(2 ÷ 2,5)I я ном.
Регулирование скорости ДПТ:
![]() ,
,
где - сопротивление якорной цепи.
Откуда вытекает возможность регулирования скорости тремя способами: , , .
1. Рассмотрим искусственные механические характеристики при регулировании скорости, изменением подводимого .
Очевидно, что по условиям эксплуатации двигателя возможно изменение только в сторону уменьшения , а, следовательно, скорость двигателя можно регулировать только вниз, при этом скорость холостого хода (точка «1») снижается.
Характеристики примут вид:
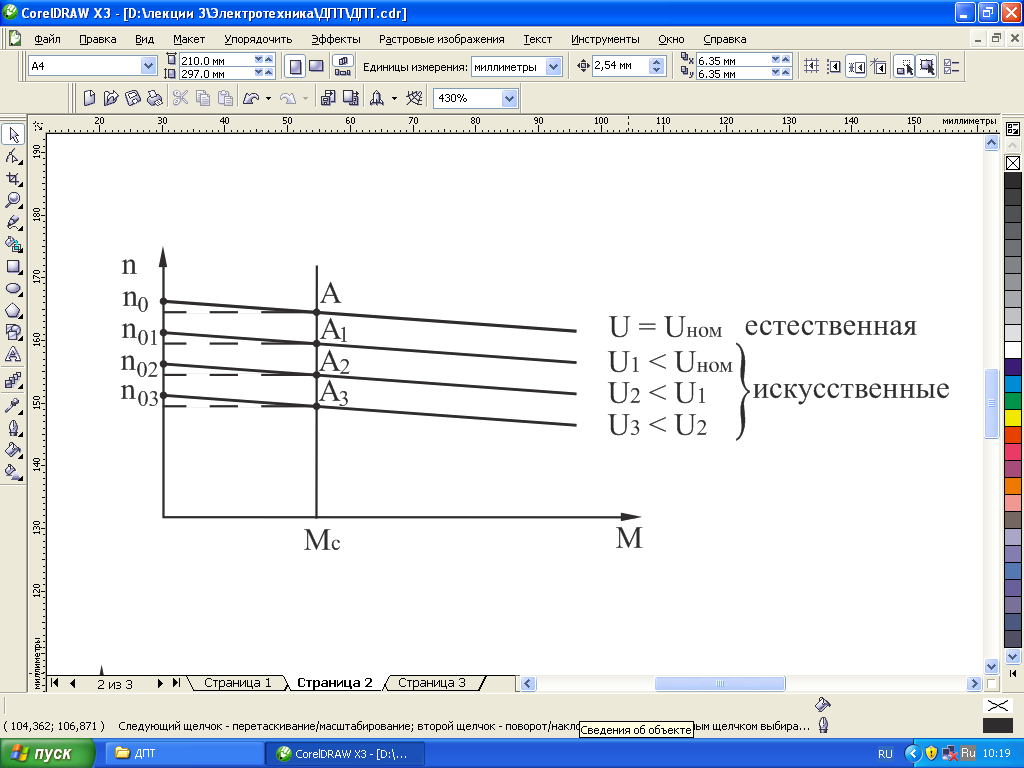
Если нагрузка на двигателе представлена характеристикой М С, то изменяя напряжение от доможно получить различные частоты вращения отn А до n А3 .
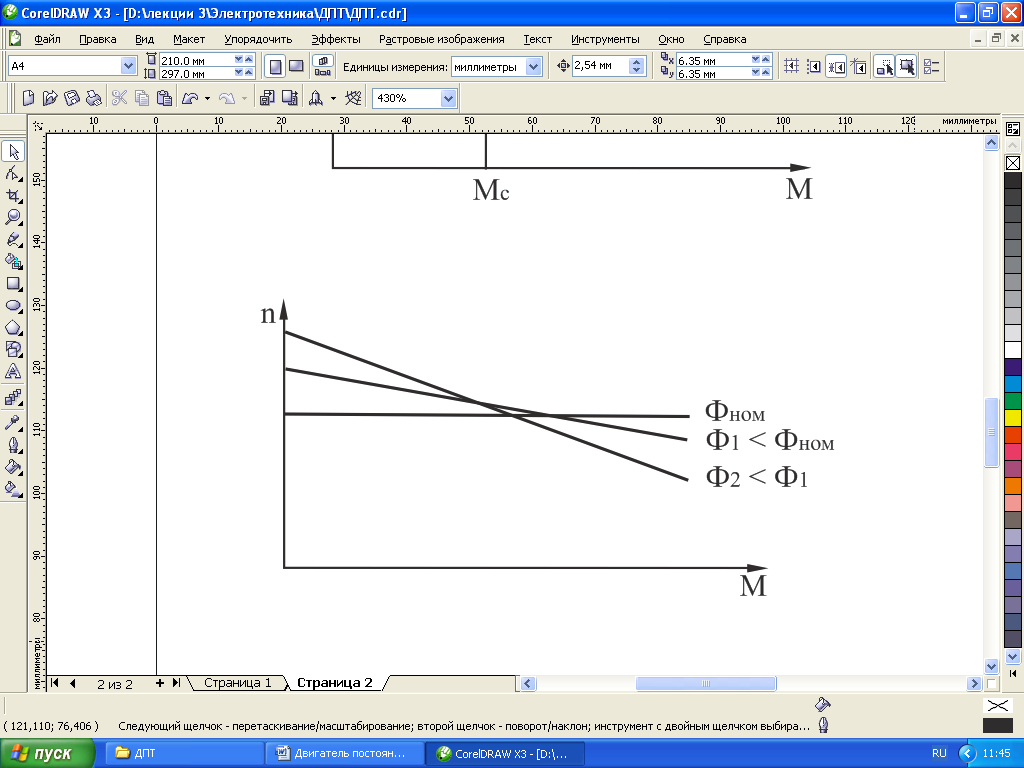
2. Регулирование скорости путем изменения величины магнитного потока.
Величину магнитного потока можно изменять с помощью тока I В, например реостатом, только в сторону уменьшения. Уменьшение магнитного потока приведут к увеличению скорости. Таким образом посредством магнитного потока можно регулировать скорость только вверх.
3. Рассмотрим механические характеристики при регулировании скорости, изменением сопротивления якорной цепи.
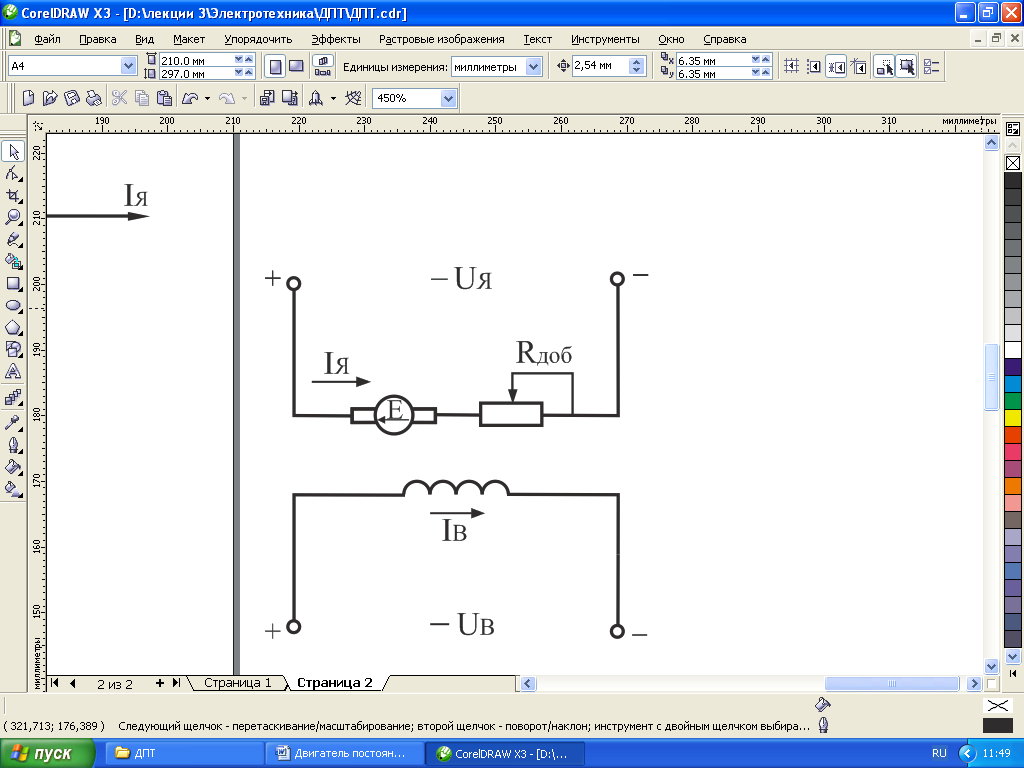
не зависит от R п, следовательно искусственные характеристики имеют общую точку .
Ток при пуске когда n = 0 и E = 0 имеет вид и достигает недопустимо больших значений, что не позволяет запустить двигатель. Для уменьшения пусковых токов вводят в цепь якоря добавочное сопротивление:
Ток уменьшается и характеристика имеет вид:

Принцип действия (на примере двигателя параллельного возбуждения). Если к двигателю подведено напряжение U, то по цепи возбуждения протекает ток I в, а по цепи якоря – ток I я. Ток возбуждения создает МДС F в = I в W в, которая возбуждает в машине магнитный поток Ф в. Ток якоря, в свою очередь, создает магнитный поток реакции якоря Ф я. Результирующий магнитный поток Ф рез = Ф в + Ф я.
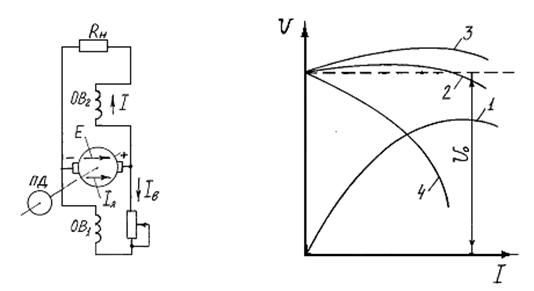
Рис.1.23 Рис. 1.24
В цепи якоря ток I я создает падение напряжения R я I я. В соответствии с законом электромагнитной силы ЭМС при взаимодействии тока I я и магнитного потока Ф рез создается вращающий момент М вр. В установившемся режиме М вр. = М пр. Когда проводники якоря пересекают магнитное поле Ф рез, в них в соответствии с законом электромагнитной индукции ЭМИ наводится ЭДС, которая направлена против напряжения сети U.
Классификация двигателей. По схеме включения обмоток возбуждения главных полюсов двигатели постоянного тока делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения.
В двигателях независимого возбуждения обмотка возбуждения питается от отдельного источника постоянного напряжения. В двигателях параллельного возбуждения обмотка возбуждения и обмотка якоря включены параллельно и питаются от одного источника. В двигателях последовательного и смешанного возбуждения есть обмотка возбуждения, включенная последовательно с обмоткой якоря. В двигателях малой мощности поток возбуждения может быть создан с помощью постоянных магнитов. Наибольшее применение находят двигатели параллельного и смешанного возбуждения.
Основные уравнения и величины, характеризующие двигатели. Такими величинами являются: механическая мощность на валу Р 2, питающее напряжение U, ток, потребляемый из сети I, ток якоря I я, ток возбуждения I в, частота вращения n, электромагнитный момент М эм. Зависимость между этими величинами описывается:
Ø уравнением электромагнитного момента:
М эм = С м I я Ф;
Ø уравнением электрического состояния цепи якоря:
U = Е пр + R я I я; (1.4)
Е пр = С E nФ;
Ø уравнением моментов:
М эм = М с + М пот + М д,
где М с – момент сопротивления на валу, создаваемый нагрузкой; М пот – момент потерь, создаваемый всеми видами потерь в двигателе; М д – динамический момент, создаваемый инерционными силами;
Характеристики двигателей. Важнейшей из характеристик является механическая n (М с) – зависимость частоты вращения n от момента на валу (далее индекс «с» опускается) при U = const, I в = const. Она показывает влияние механической нагрузки (момента) на валу двигателя на частоту вращения, что особенно важно знать при выборе и эксплуатации двигателей. Другие характеристики двигателей: регулировочная n (I в), скоростная n (I я), рабочие М, Р 1, n , I, h(Р 2) – здесь подробно не рассматриваются.
Механические характеристики могут быть естественными и искусственными. Под естественными характеристиками понимаются характеристики, снятые при отсутствии в схеме каких-либо дополнительных сопротивлений, например, реостатов в цепях якоря или возбуждения, искусственными – при наличии таких сопротивлений.
Уравнение механической характеристики двигателя. Оно может быть получено из (1.1). Подставим вместо Е ее значение в (1.4), тогда
n = (U – R я I я)/С Е Ф. (1.5)
Заменяя I я его значением из (1.2), получаем уравнение механической характеристики:
n = ![]() (1.6)
(1.6)
Вид механической характеристики определяется характером зависимости потока отнагрузки двигателя, что в свою очередь зависит от схемы включения обмотки возбуждения.
Реверсирование двигателя. Под реверсированием двигателя понимают изменение направления вращения его якоря. Возможные способы реверсирования вытекают из соотношения (1.2). Если изменить направление тока якоря или потока машины, то знак, а следовательно, и направление вращающего момента изменяется. Практически это достигается переключением выводов или обмотки якоря, или обмотки возбуждения. Однако одновременное переключение выводов обеих обмоток или изменение полярности питающего двигатель напряжения (кроме двигателя независимого возбуждения) к изменению знака вращающего момента и, следовательно, к изменению направления вращения не приводит.
Пуск в ход двигателей постоянного тока. К пуску двигателей предъявляются два основных требования: обеспечить необходимый для трогания с места и разгона якоря вращающий момент и не допустить при пуске протекания через якорь чрезмерно большого тока, опасного для двигателя. Практически возможны три способа пуска: прямой пуск, пуск при включении реостата в цепь якоря и пуск при пониженном напряжении в цепи якоря.
При прямом пуске цепь якоря включается сразу на полное напряжение. Так как в первый момент пуска якорь неподвижен (n = 0), то противо-ЭДС отсутствует (Е пр = С Е nФ). Тогда из (1.4) следует, что пусковой ток якоря I я,п = U/R я.
Так как R я = 0,02 ¸ 1,10 Ом, то I я,п = (50 ¸100) I ном, что недопустимо. Поэтому прямой пуск возможен только у двигателей малой мощности, где I я,п (4¸6) I ном и разгон двигателя длится менее 1 с.
Пуск при включении пускового реостата R п последовательно с якорем рассмотрим на примере схемы рис. 1.25. Пусковой ток в этом случае равен:
I я,п = U/(R я + R п). (1.7)
Сопротивление R п = U/ I я,п – R я выбирают таким, чтобы в начальный момент пуска, когда Е пр = 0, I я,п = (1,4¸2,5) I ном (большее число относится к двигателям меньшей мощности).
По мере разгона якоря возрастает Е пр, которая снижает напряжение на якоре (т.е. уменьшается числитель (1.7)), а сопротивление реостата R п выводится.
Перед пуском реостат R р выводится, что необходимо для обеспечения максимального потока и, следовательно, момента при пуске (М п = С м I я,п Ф). По мере разгона якоря реостат R р вводится до достижения требуемой частоты вращения.
Пуск с ограниченным пусковым током возможен при питании якоря двигателя от отдельного источника (генератора, выпрямителя) с регулируемым напряжением. Ограничение пускового тока и плавный разгон двигателя обеспечиваются постепенным повышением напряжения на якоре от нуля до требуемого значения.
Рассматриваемый метод находит применение в системах управления и регулирования мощных двигателей постоянного тока (см. п.1.14.3).
§ 115. ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Рабочие свойства двигателей определяются их рабочими характеристиками, представляющими собой зависимости числа оборотов т, вращающего момента Мэ, потребляемого тока I, мощности Р1 и к. п. д. η от полезной мощности на валу Р2- Эти зависимости соответствуют естественным условиям работы двигателя, т. е. машина не регулируется и напряжение сети остается постоянным. Так
как при изменении полезной мощности Р2 (т. е. нагрузки на валу) изменяется также и ток в якоре
машины, то рабочие характеристики часто строятся в зависимости от тока в якоре. Зависимости вращающего момента и скорости вращения от тока в якоре для двигателя параллельного возбуждения изображены на рис. 152, а схема сто показана выше (см. рис. 151).
Число оборотов двигателя определяется следующим выражением:
>С увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных контактах.
Так как ток возбуждения остается неизменным (машина нерегулируема), то магнитный поток также постоянен. Однако при увеличении тока в якоре увеличивается размагничивающее действие потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение Iяrя вызывает уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно падение напряжения влияет на изменение скорости в несколько большей степени, чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается. Изменение скорости у двигателя этого типа незначительно и не превышает 5% при изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного возбуждения имеют жесткую скоростную характеристику.
При неизменном магнитном потоке зависимость момента от тока в якоре представится прямой линией. Но под воздействием

Вращающий момент двигателя реакции якоря с увеличением нагрузки происходит некоторое уменьшение магнитного потока и зависимость момента пойдет несколько ниже прямой линии.
Схема двигателя последовательного возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только два зажима, так как обмотка возбуждения и якорь образуют одну последовательную цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя последовательного возбуждения определяется следующим выражением:
![]()
где rс- сопротивление последовательной обмотки возбуждения. В двигателе последовательного возбуждения магнитный поток не остается постоянным, а резко изменяется с изменением нагрузки, что вызывает значительное изменение скорости. Так как падеже напряжения в сопротивлении якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением, то число оборотов можно приближенно определить следующим выражением:
Если пренебречь насыщением стали, то можно считать магнитный поток пропорциональным току в обмотке возбуждения, который равен току в якоре. Следовательно, у двигателя последовательного возбуждения скорость вращения обратно пропорциональна току в якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е. двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т. е. двигатель идет в разнос.
Таким образом, характерным свойством двигателей последовательного возбуждения является недопустимость сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель имеет минимальную допустимую нагрузку, составляющую 25-30% номинальной. При нагрузке меньше минимально допустимой скорость двигателя резко увеличивается, что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие уменьшения нагрузки, использование двигателей последовательного возбуждения является недопустимым.
В двигателях очень малых мощностей сброс нагрузки не вызывает разноса, так как механические потери двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя последовательного возбуждения, учитывая пропорциональную зависимость между магнитным потоком и током в якоре (Ф = С"Iя), можно определить следующим выражением:
где K’=KC’
т.е. вращающий момент пропорционален квадрату тока. Однако при больших токах сказывается насыщение стали и зависимость момента приближается к прямой линии. Таким образом двигатели этого типа развивают большие вращающие моменты при малых оборотах, что имеет существенное значение при пуске больших инерционных масс и перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным включением обмоток не нашли широкого применения, так как они обладают плохими пусковыми свойствами и работают неустойчиво.
Скоростные характеристики двигателей смешанного возбуждения занимают промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения.
С увеличением тока в якоре число оборотов якоря уменьшается в большей мере, чем для двигателей параллельного возбуждения, за счет увеличения магнитного потока, вызываемого увеличением тока в последовательной обмотке возбуждения. При холостом ходе двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в двигателях смешанного возбуждения увеличивается магнитный поток и вращающий момент возрастает в большей мере, чем в двигателях параллельного возбуждения, но в меньшей мере, чем в двигателях последовательного возбуждения.
1. Устройство машин постоянного тока.
Машины постоянного тока, которые могут работать как в режиме двигателя, так и генератора, обладают рядом преимуществ. При пуске двигателя создается большой пусковой момент. Поэтому такие двигатели ироко применяются в качестве тяговых на электротранспорте. Широкие пределы и плавность регулирования скорости определяют применение двигателей постоянного тока в разнообразных системах автоматического управления.
Генераторы постоянного тока используются для питания различных силовых агрегатов (в частности, высококачественных сварочных аппаратов) Мощности машин постоянного тока самые различные:
от нескольких ватт до десятков киловатт. На транспорте используются двигатели с напряжением 550 В и мощностью 40 - 45 КВт (трамваи), с напряжением 1500 В и мощностью до 12000 КВт (электровозы). КПД в машинах постоянного тока тем выше, чем больше мощность. При мощности до 100 Вт КПД = 62%, при мощности до 100 КВт КПД достигает 91%. Недостатком машин постоянного тока является наличие щеточно-коллекторного узла, который является одним из самых ненадежных узлов машины. Рассмотрим устройство простейшей машины постоянного тока:
1 - полюсы, как правило представляющие собой катушку с сердечником,
2 - якорь (или ротор) – вращающаяся часть,
3 - проводники в пазах якоря.
Неподвижная часть, на которой укреплены полюсы, называется статором или индуктором. Индуктор служит для создания основного магнитного поля машины. ГН -геометрическая нейтраль, линия, проходящая посередине между смежными полюсами.
Важнейшей конструктивной особенностью машин постоянного тока является наличие щеточно-коллекторного узла: 1 - щетка, 2 – пластина коллектора. К пластинам коллектора подходят выводы отдельных секций якорной обмотки. Щеточно-коллекторный узел осуществляет:
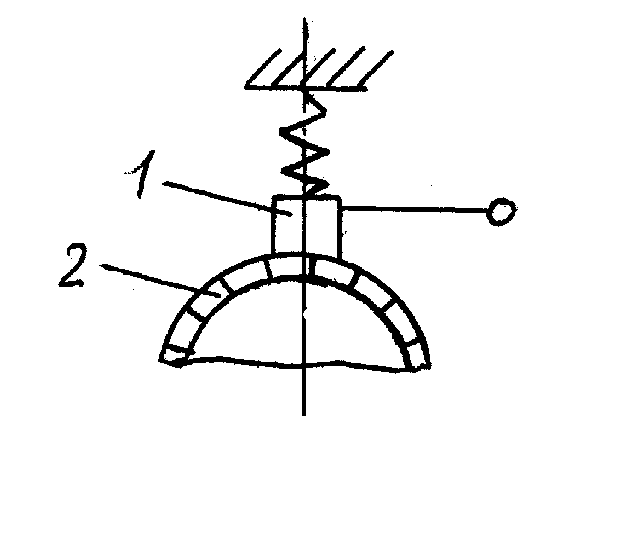
Скользящий контакт между неподвижными внешними выводами и вращающимися секциями якорной обмотки,
Выпрямление тока в режиме генератора,
Преобразование постоянного тока в переменный (инвертирование) в режиме двигателя.
Машины постоянного тока, как и многие другие электрические машины, являются обратимыми, т.е. одна и та же машина может работать как генератором, так и двигателем.
2. Принцип действия генератора и двигателя.
В режиме генератора якорь машины вращается под действием внешнего момента. Между полюсами статора имеется постоянный магнитный поток, пронизывающий якорь. Проводники обмотки якоря движутся в магнитном поле и, следовательно, в них индуктируется ЭДС, направление которой можно определить по правилу "правой руки". При этом на одной щетке возникает положительный потенциал относительно второй. Если к зажимам генератора подключить нагрузку, то в ней пойдет ток. После поворота якоря на некоторый угол щетки окажутся соединенными с другой парой пластин, т.е. подключаются к другому витку якорной обмотки, ЭДС в котором будет иметь то же направление. Таким образом, генератор вырабатывает
электрический ток, и направление этого тока, протекающего через нагрузку, не изменяется.
При подключении нагрузки к генератору и с появлением тока якоря, на валу возникает электромагнитный момент, направленный против направления вращения якоря. В режиме двигателя на зажимы машины подается постоянное напряжение, и по якорной обмотке идет ток. Проводники якорной обмотки находятся в магнитном поле машины, созданном током возбуждения и, следовательно, на них, согласно закону
Ампера, будут действовать силы. Совокупность этих сил создает вращающий момент, под действием которого якорь будет вращаться. При вращении якоря в его обмотке наводится ЭДС, которая направлена навстречу току, и поэтому для двигателей она называется противо-ЭДС.
3. Уравнения ЭДС якоря и вращающего момента.
Рассмотрим один из проводников в пазу якоря. Пусть он движется (при вращении якоря) с линейной скоростью V, тогда в этом проводнике наводится ЭДС:
Е
= В ср
l я
V sin ,
,
где
=
90 , lя - длина активной части якоря, В ср
- средняя индукция магнитного поля в
зазоре.
Пусть 2а - число параллельных ветвей. Поскольку ЭДС равна ЭДС одной ветви, то можем записать:

где Е я - искомая ЭДС якоря, N - число всех проводников якоря.
где Ф - магнитный поток одного полюса, а S - площадь, пронизываемая этим потоком, то

здесь р - число пар полюсов (р = 1,2, ...).
Скорость V можно выразить через частоту вращения якоря n:
Подставляя полученные выражения в формулу для Е я:

то окончательно получаем:
Е я = С Е Ф n.
Видно, что ЭДС якоря пропорциональна частоте вращения якоря и магнитному потоку полюсов. Используя закон Ампера, найдем силу, с которой поле возбуждения действует на один проводник якоря:
F
= В ср
l я
I sin
,
здесь
= 90 , I - ток в проводнике.
Эта сила создает вращающий момент:
где Д - диаметр якоря. Умножая на общее число проводников N, получим общий момент:
Среднюю индукцию В ср, как и раньше, получим при делении магнитного потока одного полюса на пронизываемую этим потоком площадь:
Поскольку ток якоря растекается по параллельным ветвям, то ток в одном проводнике определяется выражением:

Подставляя выражения для В ср и I в формулу общего момента, получим:

Если ввести конструктивный коэффициент
то окончательно можем записать:
Как видно, электромагнитный момент машины постоянного тока пропорционален магнитному потоку полюсов и току якоря.

Полученная выше формула ЭДС якоря Ея дает некоторое среднее значение ЭДС. В действительности величина ее колеблется (пульсирует) между двумя предельными значениями- Е min и Е max . При вращении якоря часть витков, замыкаясь накоротко щетками, выключается из параллельных ветвей, и за время поворота якоря на угол, соответствующий одной коллекторной пластине, сумма мгновенных значений ЭДС успевает несколько измениться. Максимальное значение возникающих при этом пульсаций ЭДС Е = 0,5 (Е max -E min) зависит от числа коллекторных пластин. Например, при увеличении этого числа от 8 до 40 величина Е уменьшается от 4В до 0,16В.
4. Реакция якоря в машинах постоянного тока.
При холостом ходе машины постоянного тока магнитное поле создается только обмотками полюсов. Появление тока в проводниках якоря при нагрузке сопровождается возникновением магнитного поля якоря. Поскольку направление токов в проводниках между щетками неизменно, поле вращающегося якоря оказывается неподвижным относительно щеток и полюсов возбуждения.
Oбмотка якоря становится аналогичной соленоиду, ось которого совпадает с линией щеток, поэтому, когда щетки установлены на геометрических нейтралях, поток якоря является поперечным по отношению к потоку возбуждения, а его влияние на последний называется поперечной реакцией якоря. Построив вектор результирующего потока, видим, что он теперь поворачивается относительно геометрической оси главных полюсов. Поле машины становится несимметричным, физические нейтрали поворачиваются относительно геометрических. В генераторе они смещаются в сторону вращения якоря, в двигателе - против направления вращения якоря.
Под физической нейтралью будем понимать линию, проходящую через центр якоря и проводника обмотки якоря, в которой индуктируемая результирующим магнитным потоком ЭДС равна нулю. Поперечная реакция якоря мало влияет на показатели работы машины, это влияние обычно не учитывают. Однако при смещении щеток с геометрической нейтрали в потоке якоря появляется продольная составляющая, ее влияние на поток полюсов называют продольной реакцией якоря. Она может носить как намагничивающий, так и размагничивающий характер. В общем случае реакция якоря приводит к искажению поля под полюсами и изменению потока полюсов. Первое может вызвать значительное усиление искрения под щетками (вплоть до появления кругового огня на коллекторе), а последнее в генераторе изменяет напряжение на зажимах, а в двигателе вращающий момент и частоту вращения якоря.
Для ослабления реакции якоря увеличивают воздушный зазор между статором и якорем, используют специальные короткозамкнутые витки в пазах полюсных наконечников. В машинах большой мощности для этих целей применяется специальная компенсационная обмотка. Она укладывается в пазы полюсных наконечников, а включается последовательно в цепь якоря, ее поток уравновешивает продольный поток якоря.

")