Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
Украинская государственная академия железнодорожного транспорта
Центр научно-практической подготовки
з дисциплины "Электротехника"
"Двигатель постоянного тока с параллельным возбуждением"
План
1. Введение
2. Конструкция двигателя постоянного тока
3. Пуск двигателей
4. Технические данные двигателей
5. Характеристики двигателя постоянного тока
6. Механическая характеристика
7. Список используемой литературы
Двигатель постоянного тока (ДПТ) представляет собой преобразователь электрической энергии постоянного тока в механическую. Конструкция двигателя показана на рис.1. Она имеет три основные части: статор (индуктор), якорь и коллектор.
Индуктор (1) - неподвижная часть машины, представляет собой полый литой стальной цилиндр из электротехнической стали, к которому с внутренней стороны болтами крепятся сердечники (полюса). На сердечниках располагается обмотка возбуждения (ОВ), подключаемая к щеткам. Индуктор предназначен для создания основного магнитного поля. Якорь (2) (вращающаяся внутренняя часть машины) представляет собой цилиндр, собранный из стальных листов. В пазах якоря уложена якорная обмотка. На одном валу с якорем закреплен коллектор (3), который представляет собой полый цилиндр, составленный из отдельных медных пластин (ламелей), изолированных друг от друга и от вала якоря и электрически связанных с отдельными частями обмотки якоря. Назначение коллектора - механическое выпрямление переменных синусоидальных ЭДС в постоянное по величине и направлению напряжение, снимаемое во внешнюю цепь с помощью щеток, примыкающих к коллектору. Свойства двигателей постоянного тока, в основном, определяются способом питания обмотки возбуждения. В связи с этим двигатели постоянного тока классифицируют на 2 типа: с независимым возбуждением (рис.2а) и самовозбуждением (рис.2 б, в, г)
Обмотка возбуждения в ДПТ с независимым возбуждением питается от отдельного источника постоянного тока (от полупроводникового выпрямителя, аккумулятора или возбудителя - генератора постоянного тока).
В самовозбуждающихся ДПТ цепи якоря и индуктора электрически связаны, т.е. обмотка возбуждения питается от ЭДС якоря машины.
В зависимости от электрической схемы соединения обмоток якоря и индуктора машины с самовозбуждением делятся еще на три типа: параллельного, последовательного и смешанного возбуждения (рис.2 б, в, г). ДПТ как все электрические машины обратимы, т.е. они без существенных конструктивных
изменений могут работать как в режиме генератора, так и в режиме двигателя. Режим работы ДПТ с параллельным возбуждением. Рассмотрим работу ДПТ с параллельным возбуждением (рис.2б). При включении двигателя в сеть постоянного тока в обеих обмотках возникают токи. При этом в обмотке возбуждения ток возбуждения IВ создает магнитное поле индуктора.
Взаимодействие тока якоря с магнитным полем индуктора создает электромагнитный момент МЭ.
МЭ = сФIЯ, (1)
где с - постоянный коэффициент;
IЯ - ток якоря;
Ф - магнитный поток.
Электромагнитный момент МЭ отличается от момента МВ на валу двигателя на величину момента потерь холостого хода МХХ, которым ввиду малости можно пренебречь и считать, что
В проводниках вращающего якоря индуктируется протво-ЭДС E:
где n - скорость вращения якоря;
k - постоянный коэффициент.
Уравнение электрического равновесия двигателя имеет вид:
U = E + IЯ·RЯ=knФ+ IЯ·RЯ, (3)
где U - напряжение питания сети.
Пуск двигателя в ход
При пуске двигателя якорь в первый момент неподвижен (n = 0) и учитывая (2) ЭДС якоря Е =кnФ=0. При этом согласно (3) пусковой ток якоря IЯП недопустимо велик, т.к. RЯ мало и определяется как:
Поэтому для ограничения пускового тока последовательно в цепь якоря вводится сопротивление пускового реостата RП, который полностью введен перед запуском двигателя и выводится после разгона двигателя по мере возрастания противо - ЭДС (Е).
Такой запуск двигателя предохраняет его якорную обмотку от больших пусковых токов IЯП и позволяет получить в этом режиме максимальный магнитный поток.
Если пуск двигателя осуществляется на холостом ходу, то нет необходимости развивать максимальный вращающий момент МВ на валу. По этому пуск двигателя может быть осуществлен путем плавного увеличения напряжения питания сети U.
Реверсирование двигателя .
Изменение направления вращения двигателя может быть достигнуто изменением тока или в обмотке якоря, или в обмотке возбуждения, т.к. при этом меняется знак вращающего момента. Одновременное изменение направления тока в обоих обмотках направление вращения двигателя не изменяет. Переключение концов обмоток должно производиться только после полной остановки двигателя.
Регулирование скорости вращения .
Из выражения (3) можно определить скорость вращения двигателя:
двигатель постоянный ток питание обмотка
Из формулы (6) видно, что регулировать скорость вращения двигателя постоянного тока можно изменением напряжения сети, магнитного потока возбуждения и сопротивления цепи якоря. Наиболее распространенный способ регулирования скорости вращения двигателя - изменение магнитного потока посредством регулировочного реостата в цепи возбуждения.
Уменьшение тока возбуждения ослабляет магнитный поток и увеличивает скорость вращения электродвигателя. Этот способ экономичен, т.к. ток возбуждения (в двигателях параллельного возбуждения) составляет 3-5% от IН якоря, и тепловые потери в регулировочном реостате весьма малы. Основные характеристики двигателя постоянного тока с параллельным возбуждением
Работа двигателя постоянного тока с параллельным возбуждением оценивается следующими основными характеристиками:
Характеристика холостого хода: (рис.3)
n0 = ѓ (IВ), при U = UН = const и IЯ = I0,
где n0 - скорость вращения на холостом ходу (без нагрузки),
I0 - ток холостого хода составляющий 5 - 10% IН;
UН - номинальное значение напряжения питающей сети.
Учитывая, что на холостом ходу произведение IЯRЯ мало по сравнению с U, то из (6) скорость двигателя определяется обратной зависимостью к магнитному потоку Ф:
При увеличении тока в обмотке возбуждения магнитный поток изменяется по кривой намагничивания Ф = ѓ (IВ), поэтому зависимость между скоростью вращения двигателя n и током возбуждения IВ имеет почти гиперболический характер. При малых значениях тока возбуждения обороты меняются почти обратно пропорционально. При больших токах возбуждения начинает
сказываться магнитное насыщение стали полюсов, и кривая становится более пологой и идет почти параллельно оси абсцисс. Резкое изменение - уменьшение тока возбуждения, а также случайный обрыв цепи возбуждения согласно (9) могут вызвать "разнос" двигателя (при IВ > 0, а следовательно Ф также стремится к 0, n > ?).
Механическая характеристика. Это зависимость скорости вращения ротора от момента МВ на валу двигателя при неизменном напряжении питания сети и токе возбуждения:
n=ѓ (МВ), при U = UН = const, IВ = const.
Для двигателя параллельного возбуждения момент МВ пропорционален первой степени тока якоря IЯ. Поэтому механическая характеристика может быть представлена зависимостью n (Iя), которая называется электромеханической или скоростной (рис.4).
К валу двигателя приложена нагрузка (тормозной момент). Согласно (6) при постоянных значениях тока возбуждения уменьшение скорости вращения n является следствием падения напряжения в цепи якоря - IЯ·RЯ и реакции якоря. При увеличении нагрузки скорость вращения уменьшается на незначительную величину, порядка 3-8%. Такая скоростная характеристика называется жесткой. Регулировочная характеристика (рис.5). Это зависимость тока возбуждения IВ от тока якоря IЯ при постоянном напряжении сети U и постоянной скорости вращения n:
IВ = ѓ (IЯ) при U = UН, n = const.
Из анализа внешней характеристики видно, что скорость вращения падает с ростом нагрузки.
Регулировочная характеристика дает возможность судить о том, каким образом, в каких пределах необходимо регулировать ток в обмотке возбуждения, чтобы поддерживать постоянную скорость вращения.
Методика эксперимента
Исследование режимов работы ДПТ с параллельным возбуждением проводятся на
модульном учебном комплексе МУК-ЭП1, который состоит из:
Блока питания двигателя постоянного тока БПП1;
Блока питания асинхронного двигателя БПА1
Электромашинного агрегата МА1-АП.
В качестве исследуемого двигателя постоянного тока использован ПЛ073У3 (220В, 180 Вт,
1500 об/мин). Автоматическая коммутация обмоток двигателя и подключение измерительных
приборов осуществляется в блоке БПП1.
В качестве нагрузки использован асинхронный двигатель (АД) в режиме динамического торможения. Автоматическая коммутация обмоток АД и подключение измерительных приборов к нему осуществляется в блоке БПА1.
Схема работы комплекса после коммутаций блоков представлена на рис.6.
Список используемой литературы
1. Кацман М.М. Электрические машины. - М.: Высш. шк., 1993.
2. Копылов И.П. Электрические машины. - М.: Энергоатомиздат, 1986
Размещено на Allbest.ru
...Подобные документы
Принцип работы и устройство генераторов постоянного тока. Электродвижущая сила и электромагнитный момент генератора постоянного тока. Способы возбуждения генераторов постоянного тока. Особенности и характеристика двигателей различных видов возбуждения.
реферат , добавлен 12.11.2009
Регулирование частоты вращения двигателей постоянного тока посредством изменения потока возбуждения. Максимально-токовая защита электропривода. Скоростные характеристики двигателя. Схемы силовых цепей двигателей постоянного тока и асинхронных двигателей.
курсовая работа , добавлен 30.03.2014
Принцип действия генератора постоянного тока. Якорные обмотки и процесс возбуждения машин постоянного тока. Обмотка с "мертвой" секцией. Пример выполнения простой петлевой и волновой обмотки. Двигатель постоянного тока с последовательным возбуждением.
презентация , добавлен 09.11.2013
Конструкция и принцип действия электрических машин постоянного тока. Исследование нагрузочной, внешней и регулировочной характеристик и рабочих свойств генератора с независимым возбуждением. Особенности пуска двигателя с параллельной системой возбуждения.
лабораторная работа , добавлен 09.02.2014
Изучение механических характеристик электродвигателей постоянного тока с параллельным, независимым и последовательным возбуждением. Тормозные режимы. Электродвигатель переменного тока с фазным ротором. Изучение схем пуска двигателей, функции времени.
лабораторная работа , добавлен 23.10.2009
Принцип работы и устройство генератора постоянного тока. Типы обмоток якоря. Способы возбуждения генераторов постоянного тока. Обратимость машин постоянного тока. Двигатель параллельного, независимого, последовательного и смешанного возбуждения.
реферат , добавлен 17.12.2009
Конструкция двигателя постоянного тока. Сердечник главных плюсов, тип и шаг обмотки якоря. Количество витков обмотки, коллекторных пластин, пазов. Характеристика намагничивания двигателя. Масса проводов обмотки якоря и основные динамические показатели.
курсовая работа , добавлен 21.05.2012
Питание двигателя при регулировании скорости изменением величины напряжения от отдельного регулируемого источника постоянного тока. Применение тиристорных преобразователей в электроприводах постоянного тока. Структурная схема тиристорного преобразователя.
курсовая работа , добавлен 01.02.2015
Моделирование пуска двигателя постоянного тока ДП-62 привода тележки слитковоза с помощью пакета SciLab. Структурная схема модели, ее элементы. Паспортные данные двигателя ДП-62, тип возбуждения. Диаграмма переходных процессов, построение графика.
лабораторная работа , добавлен 18.06.2015
Особенности расчета двигателя постоянного тока с позиции объекта управления. Расчет тиристорного преобразователя, датчиков электропривода и датчика тока. Схема двигателя постоянного тока с независимым возбуждением. Моделирование внешнего контура.
Глава 29
Основные понятия
М, вращающим.
противоэлектродвижущей
![]() .
(29.1)
.
(29.1)
![]() , (29.3)
, (29.3)
![]() ,
,
![]() .
.
Но, согласно (25.24),
![]()
![]() , (29.4)
, (29.4)
![]() .
.
М, .
т. е. U или уменьшение потока Ф ;
U, Ф
Ф
Пуск двигателя
U .
пусковые реостаты
Р
О
1
![]() .
.
Одновременно через рычаг Р и шину Ш Р,
,
М прямо пропорционален потоку Ф Ф
Глава 29
Основные понятия
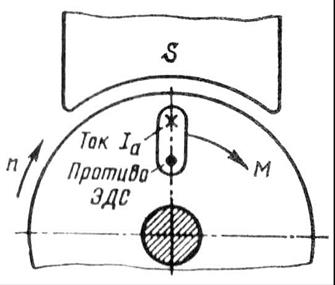
Коллекторные машины обладают свойством обратимости, т. е. они могут работать как в режиме генератора, так и в режиме двигателя. Поэтому если машину постоянного тока подключить к источнику энергии постоянного тока, то в обмотке возбуждения и в обмотке якоря машины появятся токи. Взаимодействие тока якоря с полем возбуждения создает на якоре электромагнитный момент М, который является не тормозящим, как это имело место в генераторе, а вращающим.
Под действием электромагнитного момента якоря машина начнет вращаться, т. е. машина будет работать в режиме двигателя, потребляя из сети электрическую энергию и преобразуя ее в механическую. В процессе работы двигателя его якорь вращается в магнитном поле. В обмотке якоря индуцируется ЭДС ,направление которой можно определить по правилу «правой руки». По своей природе она не отличается от ЭДС, наводимой в обмотке якоря генератора. В двигателе же ЭДС направлена против тока , и поэтому ее называют противоэлектродвижущей силой (противо-ЭДС) якоря (рис. 29.1).
Для двигателя, работающего с постоянной частотой вращения,
![]() .
(29.1)
.
(29.1)
Из (29.1) следует, что подведенное к двигателю напряжение уравновешивается противо-ЭДС обмотки якоря и падением напряжения в цепи якоря. На основании (29.1) ток якоря
Умножив обе части уравнения (29.1) на ток якоря , получим уравнение мощности для цепи якоря:
![]() , (29.3)
, (29.3)
где - мощность в цепи обмотки якоря; - мощность электрических потерь в цепи якоря.
Для выяснения сущности выражения проделаем следующее преобразование:
![]() ,
,
![]() .
.
Но, согласно (25.24),
![]()
![]() , (29.4)
, (29.4)
где - угловая частота вращения якоря; - электромагнитная мощность двигателя.
Следовательно, выражение представляет собой электромагнитную мощность двигателя.
Преобразовав выражение (29.3) с учетом (29.4), получим
![]() .
.
Анализ этого уравнения показывает, что с увеличением нагрузки на вал двигателя, т. е. с увеличением электромагнитного момента М, возрастает мощность в цепи обмотки якоря , т. е. мощность на входе двигателя. Но так как напряжение, подводимое к двигателю, поддерживается неизменным , то увеличение нагрузки двигателя сопровождается ростом тока в обмотке якоря .
В зависимости от способа возбуждения двигатели постоянного тока, так же как и генераторы, разделяют на двигатели с возбуждением от постоянных магнитов (магнитоэлектрические) и с электромагнитным возбуждением. Последние в соответствии со схемой включения обмотки возбуждения относительно обмотки якоря подразделяют на двигатели параллельного (шунтовые), последовательного (сериесные) и смешанного (компаундные) возбуждения.
В соответствии с формулой ЭДС частота вращения двигателя (об/мин)
Подставив значение из (29.1), получим (об/мин)
т. е. частота вращения двигателя прямо пропорциональна напряжению и обратно пропорциональна магнитному потоку возбуждения. Физически это объясняется тем, что повышение напряжения U или уменьшение потока Ф вызывает увеличение разности ; это, в свою очередь, ведет к росту тока [см. (29.2)]. Вследствие этого возросший ток повышает вращающий момент, и если при этом нагрузочный момент остается неизменным, то частота вращения двигателя увеличивается.
Из (29.5) следует, что регулировать частоту вращения двигателя можно изменением либо напряжения U, подводимого к двигателю, либо основного магнитного потока Ф , либо электрического сопротивления в цепи якоря .
Направление вращения якоря зависит от направлений магнитного потока возбуждения Ф и тока в обмотке якоря. Поэтому, изменив направление какой-либо из указанных величин, можно изменить направление вращения якоря. Следует иметь в виду, что переключение общих зажимов схемы у рубильника не дает изменения направления вращения якоря, так как при этом одновременно изменяется направление тока и в обмотке якоря, и в обмотке возбуждения.
Пуск двигателя
Ток якоря двигателя определяется формулой (29.2). Если принять U и неизменными, то ток зависит от противо-ЭДС . Наибольшего значения ток достигает при пуске двигателя в ход. В начальный момент пуска якорь двигателя неподвижен и в его обмотке не индуцируется ЭДС . Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток
Обычно сопротивление невелико, поэтому значение пускового тока достигает недопустимо больших значений, в 10-20 раз превышающих номинальный ток двигателя.
Такой большой пусковой ток весьма опасен для двигателя. Во-первых, он может вызвать в машине круговой огонь, а во-вторых, при таком токе в двигателе развивается чрезмерно большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя и может механически их разрушить. И наконец, этот ток вызывает резкое падение напряжения в сети, что неблагоприятно отражается на работе других потребителей, включенных в эту сеть. Поэтому пуск двигателя непосредственным подключением в сеть (безреостатный пуск) обычно применяют для двигателей мощностью не более 0,7-1,0 кВт. В этих двигателях благодаря повышенному сопротивлению обмотки якоря и небольшим вращающимся массам значение пускового тока лишь в 3-5 раз превышает номинальный, что не представляет опасности для двигателя. Что же касается двигателей большей мощности, то при их пуске для ограничения пускового тока используют пусковые реостаты (ПР), включаемые последовательно в цепь якоря (реостатный пуск).
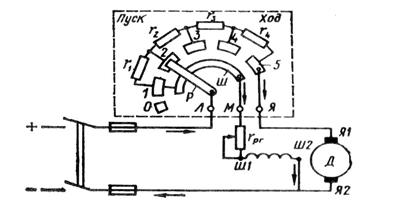
Перед пуском двигателя необходимо рычаг Р
реостата поставить на холостой контакт О
(рис. 29.2). Затем включают рубильник, переводят рычаг на первый промежуточный контакт 1
и цепь якоря двигателя оказывается подключенной к сети через наибольшее сопротивление реостата ![]() .
.
Рис. 29.2. Схема включения пускового реостата
Одновременно через рычаг Р и шину Ш к сети подключается обмотка возбуждения, ток в которой в течение всего периода пуска не зависит от положения рычага Р, так как сопротивление шины по сравнению с сопротивлением обмотки возбуждения пренебрежимо мало.
Пусковой ток якоря при полном сопротивлении пускового реостата
С появлением тока в цепи якоря возникает пусковой момент , под действием которого начинается вращение якоря. По мере нарастания частоты вращения увеличивается противо-ЭДС , что ведет к уменьшению пускового тока и пускового момента.
По мере разгона якоря двигателя рычаг пускового реостата переключают в положения 2, 3 и т. д. В положении 5 рычага реостата пуск двигателя заканчивается . Сопротивление пускового реостата выбирают обычно таким, чтобы наибольший пусковой ток превышал номинальный не более чем в 2-3 раза.
Так как вращающий момент двигателя М прямо пропорционален потоку Ф [см. (25.24)], то для облегчения пуска двигателя параллельного и смешанного возбуждения сопротивление реостата в цепи возбуждения следует полностью вывести . Поток возбуждения Ф в этом случае получает наибольшее значение и двигатель развивает необходимый вращающий момент при меньшем токе якоря.
Для пуска двигателей большей мощности применять пусковые реостаты нецелесообразно, так как это вызвало бы значительные потери энергии. Кроме того, пусковые реостаты были бы громоздкими. Поэтому в двигателях большой мощности применяют безреостатный пуск двигателя путем понижения напряжения. Примерами этого являются пуск тяговых двигателей электровоза переключением их с последовательного соединения при пуске на параллельное при нормальной работе (см. § 29.6) или пуск двигателя в схеме «генератор-двигатель» (см. § 29.4).
Двигатель параллельного возбуждения
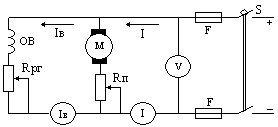
Схема включения в сеть двигателя параллельного возбуждения показана на рис. 29.3, а. Характерной особенностью этого двигателя является то, что ток в обмотке возбуждения (ОВ) не зависит от тока нагрузки (тока якоря). Реостат в цепи возбуждения служит для регулирования тока в обмотке возбуждения и магнитного потока главных полюсов.
Эксплуатационные свойства двигателя определяются его рабочими характеристиками, под которыми понимают зависимость частоты вращения n , тока I , полезного момента M 2 , вращающего момента M от мощности на валу двигателя Р 2 при и (рис. 29.3, 6 ).
Для анализа зависимости и , которую обычно называют скоростной характеристикой, обратимся к формуле (29.5), из которой видно, что при неизменном напряжении U на частоту вращения влияют два фактора: падение напряжения в цепи якоря и поток возбуждения Ф . При увеличении нагрузки уменьшается числитель , при этом вследствие реакции якоря уменьшается и знаменатель Ф . Обычно ослабление потока, вызванное реакцией якоря, невелико и первый фактор влияет на частоту вращения сильнее, чем второй. В итоге частота вращения двигателя с ростом нагрузки Р 2 уменьшается, а график приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потока Ф , то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рис. 29.3, б. Однако такая зависимость является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения n двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.. ,так как
Если пренебречь реакцией якоря, то (так как ) можно принять . Тогда механическая характеристика двигателя параллельного возбуждения представляет собой прямую линию, несколько наклоненную к оси абсцисс (рис. 29.4, а ). Угол наклона механической характеристики тем больше, чем больше значение сопротивления, включенного в цепь якоря. Механическую характеристику двигателя при отсутствии дополнительного сопротивления в цепи якоря называют естественной (прямая 1 ). Механические характеристики двигателя, полученные при введении дополнительного сопротивления в цепь якоря, называют искусственными (прямые 2 и 3 ).
Вид механической характеристики зависит также и от значения основного магнитного потока Ф . Так, при уменьшении Ф увеличивается частота вращения х.х. и одновременно увеличивается , т. е. увеличиваются оба слагаемых уравнения (29.11). Это приводит к резкому увеличению наклона механической характеристики, т. е. к уменьшению ее жесткости (рис. 29.4, б ).
При изменении напряжения на якоре U меняется частота вращения , а остается неизменной. В итоге жесткость механической характеристики (если пренебречь влиянием реакции якоря) не меняется (рис. 29.4, в ), т. е. характеристики смещаются по высоте, оставаясь параллельными друг другу.
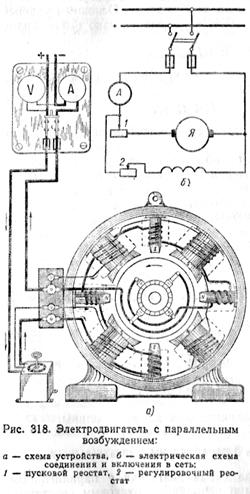
§ 138. ЭЛЕКТРОДВИГАТЕЛЬ С ПАРАЛЛЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
На рис. 318 представлена схема двигателя с параллельным возбуждением и включенным в цепь якоря пусковым реостатом. Так как обмотка возбуждения включена параллельно в сеть, то при постоянном сопротивлении цепи возбуждения и напряжении сети магнитный поток Ф двигателя должен быть постоянным.
Из формулы
видно, что величина противо-э. д. с. двигателя уменьшается с увеличением тока якоря, отчего скорость двигателя также уменьшается.
Однако, как уже говорилось ранее, величина падения напряжения в якорной обмотке I а r а очень мала в сравнении с напряжением U. Поэтому с увеличением нагрузочного тока скорость вращения двигателя снижается незначительно.
Отсюда характерным свойством двигателя с параллельным возбуждением является почти постоянная скорость вращения при изменении нагрузки на его валу. Обычно скорости у двигателей этого типа при достижении полной нагрузки уменьшаются лишь на 3-5%.
Вращающий момент двигателя пропорционален произведению тока якоря на величину магнитного потока:
Отсюда видно, что момент вращения двигателя с параллельным возбуждением пропорционален току якоря:
Следовательно, по амперметру, включенному в цепь якоря, можно судить о нагрузке двигателя.
Наибольшая скорость вращения будет у двига теля при холостом ходе, если при этом сопротивление регулировочного реостата полностью выведено. Размыкание цепи возбуждения вызовет уменьшение магнитного потока двигателя до незначительной величины потока остаточного магнетизма. Так как противо-э. д. с. должна быть почти равна напряжению сети, то с уменьшением магнитного потока скорость вращения двигателя резко возрастет и станет опасной для механической прочности двигателя. Поэтому при эксплуатации двигателя необходимо следить за исправным состоянием цепи возбуждения.
Регулирование скорости вращения двигателя с параллельным возбуждением обычно производится путем изменения магнитного потока с помощью регулировочного реостата в цепи возбуждения. Этот способ регулирования скорости является наиболее экономичным. Регулирование скорости у некоторых двигателей лежит в пределах от 1,5:1 до 4:1. Цифры показывают отношение максимальной скорости к минимальной. Пределы регулирования ограничиваются в основном ухудшением условий коммутации и механической прочностью якоря.
Изменение направления вращения двигателей с параллельным возбуждением можно производить изменением направления тока в обмотке возбуждения полюсов или изменением направления тока в обмотке якоря. Обычно перемена вращения осуществляется вторым способом, так как всякие операции с обмоткой возбуждения опасны для обслуживающего персонала и нежелательны ввиду появления э. д. с. самоиндукции, могущей вызвать пробой изоляции обмотки и обгорание контактов.
Двигатели с параллельным возбуждением применяются в сетях постоянного тока для привода некоторых станков, механизмов (подвесные электрические дороги, насосы, вентиляторы, ткацкие машины, прокатные станы, шахтные подъемники), требующих постоянной скорости вращения или широкой регулировки скорости.
23 .Реакция якоря, ее негативное влияние на работу двигателя постоянного тока, способы компенсации реакции якоря.
Реакция якоря-воздействие магнитного поля, создаваемого током якоря, на магнитное поле главных полюсов машины. В режиме холостого хода ток якоря =0 и магнитное поле машины образуется только главными полюсами (рис (а)). Оно симметрично относительно оси главных полюсов и относительно геометрической нейтрали. Если отключить обмотку возбуждения и подключить якорь к источнику питания, то протекающий в обмотке якоря ток создаст магнитное поле, показанное на рисунке (б).Маг. ось полюсов этого поля совпадает с осью щеток и перпендикулярна оси поля главных полюсов. Вращение якоря не влияет на картину поля якоря, т.к. распределение тока в обмотке якоря остается постоянным. В рабочем режиме машины включены обе обмотки и магнитное поле образуется суммированием обоих полей. В результате ось магнитного поля поворачивается на некоторый уголи на этот же угол поворачивается физическая нейтраль. В режиме двигателя нейтраль смещается против вращения. В рез-те смещения часть проводников параллельной ветви, расположенных между щеткой и нейтралью окажется под полюсом противоположной полярности и будет создавать тормозной момент.Изменение нагрузки машины будет приводить к изменению тока якоря и соответствующему усилению или ослаблению его магнитного поля. Поэтому уголбудет изменяться с нагрузкой.Помимо смещения нейтрали реакция якоря уменьшает общий магнитный поток за счет того, что поле под главными полюсами искажается. Под одним краем полюса оно ослабляется, а под другим усиливается, но усиление поля в результате насыщения края полюса оказывается меньше ослабления и результирующий магнитный поток уменьшается, что отрицательно сказывается на энергетических показателях машины.Смещение физической нейтрали оказывает также негативное влияние на процесс коммутации.Наиболее эфф. средством уменьш. влияния реакции якоря является компенсационная обмотка . Она укладывается в специальные пазы главных полюсов и включается последовательно в цепь якоря. Магнитное поле компенсационной обмотки направлено встречно и компенсирует магнитное поле якоря. Ток компенсационной обмотки = току якоря, поэтому компен-ия происходит при всех режимах от холостого хода до полной нагрузки. В рез-те поле машины под главными полюсами остается практически неизменным. Другой способ - увелич. зазора между краями главных полюсов и якорем. Для сохранения потока при увеличении зазора требуется увеличение МДС обмотки возбуждения.
Электрические машины постоянного тока.
Генератор с параллельным возбуждением.
Расчётные формулы:
Ток отдаваемый генератором в сеть:
Эдс. генератора: Е= U+Iя ∙Rя.
Мощность отдаваемая сети: Р2 = U∙I =I 2 ∙R
Мощность приводного двигателя: Р1 = Р2/ η
Мощность потерь в обмотке якоря:
Ря = I 2 я∙ Rя
Мощность потерь в обмотке возбуждения:
Рв = U ∙Iв = I 2 в∙ Rв
Суммарные потери: ΣР = Р1 – …
Р2 .
Коэффициент полезного действия генератора:
η = Р2/Р1 = U∙I / (U∙I+ ΣР)
Двигатель с параллельным возбуждением.
Расчётные формулы:
Ток двигателя: I = Iя + Iв
Напряжение двигателя: U = E + Iя ∙Rя.
Мощность потребляемая от сети: Р1 = U∙I
Мощность на валу: Р 2 = Р 1 ∙η
Момент на валу двигателя:
М = 9550∙ Р 2 / n 2 .
Коэффициент полезного действия двигателя:
η = Р 2 /Р 1 = (U∙I- ΣР) / U∙I
Пример 6.1. Генератор постоянного тока с параллельным возбуждением развивает номинальное напряжение Uн =220 В. Генератор нагружен на нагрузку Rн = 2,2 Ом. Сопротивление обмотки якоря Rя = 0,2 Ом, обмотки возбуждения Rв =220 Ом. КПД генератора η = 0,87. Определить следующие величины:
1.ток нагрузки; 2. ток якоря; 3. ток возбуждения; 4. эдс генератора;
5.полезную мощность; 6. потребляемую мощность; 7. суммарные потери в генераторе; 8. потери в обмотке якоря; 9. потери в обмотке возбуждения.
1.Ток нагрузки:
2.Ток возбуждения:
![]()
3.Ток якоря: Iя = I – Iв = 100 – 1= 99 А.
4.Эдс генератора:
Е = U+ Iя ∙Rя = 220 + 99∙0,1 = 229,9 В.
5.Полезная мощность:
Р2 = Uн∙I = 220∙100 = 22000 Вт = 22 кВт.
6.Потребляемая мощность:
7.Суммарные потери в генераторе:
ΣР = Р1– Р2 = 25,87 – 22 = 3,87 кВт.
8.Потери в обмотке якоря:
Ря = Iя 2 ∙Rя = 99 2 ∙0,2 = 1960,2 Вт.
9.Потери в обмотке возбуждения:
Рв = Uн∙Iв = 220∙1 = 220 Вт.
Ответ: I = 100А; Iв = 1 А; Iя = 99 А; Е = 229,9 В; Р2 = 22 кВт;
Р1 = 25,87 кВт; ΣР = 3,87 кВт; Ря = 1960,2 Вт; Рв = 220 Вт.
Пример 6.2. Рис.8.2.Двигатель постоянного токапараллельного возбуждения работает от сети Uн = 220 В. Частота вращения якоря n2 = 1450 об/мин. Ток двигателя I = 500 А, противо–эдс якоря Е = 202 В, сопротивление обмотки возбуждения Rв = 44 Ом. Кпд двигателя
η = 0,88. Определить:1.ток возбуждения; 2.ток якоря; 3. сопротивление обмотки якоря; 4.потребляемую мощность; 5.полезную мощность на валу; 6 Суммарные потери в двигателе; 7.потери в обмотке якоря; 8.потери в обмотке якоря; 9.вращающий момент на валу.
1. Ток возбуждения:
![]()
2. Ток якоря:
Iя = I – Iв = 500 –5 = 495 А.
3. Сопротивление обмотки якоря:
4. Потребляемая мощность от сети:
Р1 = Uн∙I = 220 ∙500 = 110 000 Вт = 110 кВт.
5. Полезная мощность на валу:
Р2 = P1∙ η = 110 ∙ 0,87 = 95,7 кВт.
6. Суммарные потери в двигателе:
ΣР = Р1 – P2 = 110 – 95,7 = 14,3 кВт.





