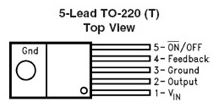
Pokud jde o schémata jednoduchý pulzní měniče konstantní napětí.
Hlavní výhody pulzních měničů:
Za prvé mají vysokou účinnost a za druhé mohou pracovat při nižším vstupním napětí, než je výstupní.
Pulzní měniče jsou rozděleny do skupin:
- - snížení, zvýšení, převrácení;
- - stabilizovaný, nestabilizovaný;
- – galvanicky oddělené, neizolované;
- – s úzkým a širokým rozsahem vstupních napětí.
Pro výrobu domácích pulsních měničů je nejlepší použít specializované integrované obvody - jsou snadněji sestavitelné a při nastavování nejsou náladové.
Nestabilizovaný tranzistorový měnič
Tento měnič pracuje na frekvenci 50 kHz, galvanické oddělení zajišťuje transformátor T1, který je navinutý na kroužku K10x6x4,5 z feritu 2000NM a obsahuje: primární vinutí - 2x10 závitů, sekundární vinutí - 2x70 závitů PEV-0,2 drát. Tranzistory lze nahradit KT501B. Proud z baterie se při absenci zátěže prakticky nespotřebovává.

Stabilizovaný tranzistorový měnič napětí
Transformátor T1 je navinut na feritovém kroužku o průměru 7 mm a obsahuje dvě vinutí po 25 závitech drátu PEV = 0,3.
Nestabilizovaný měnič napětí na bázi multivibrátoru
Push-pull nestabilizovaný převodník založený na multivibrátoru (VT1 a VT2) a výkonovém zesilovači (VT3 a VT4). Výstupní napětí se volí počtem závitů sekundárního vinutí pulzního transformátoru T1.
Převodník na specializovaném čipu MAX631
Stabilizační převodník typu založený na čipu MAX631 od MAXIM. Generační frekvence je 40 ... 50 kHz, akumulačním prvkem je tlumivka L1.
Neregulovaný dvoustupňový násobič napětí na MAX660
Jeden ze dvou čipů můžete použít samostatně, například druhý, pro znásobení napětí ze dvou baterií.
Spínací regulátor boostu na čipu MAX1674
Typický obvod pro zapínání spínacího boost stabilizátoru na čipu MAX1674 od MAXIM. Provoz je udržován při vstupním napětí 1,1 voltu. Účinnost - 94%, zatěžovací proud - až 200 mA.
MCP1252-33X50: Dvě napětí z jednoho napájecího zdroje
Umožňuje přijímat dvě různá stabilizovaná napětí s účinností 50 ... 60 % a zatěžovacím proudem až 150 mA v každém kanálu. Kondenzátory C2 a C3 jsou zařízení pro ukládání energie.
Spínací step-up stabilizátor na čipu MAX1724EZK33 od MAXIM
Typický obvod pro zapínání specializovaného mikroobvodu od MAXIM. Zůstává funkční při vstupním napětí 0,91 V, má malé pouzdro SMD a poskytuje zatěžovací proud až 150 mA s účinností 90 %.
Spínací regulátor buck na čipu TL497
Typický obvod pro zapínání spínacího regulátoru na široce dostupném čipu TEXAS. Rezistor R3 reguluje výstupní napětí v rozmezí + 2,8 ... + 5 voltů. Rezistor R1 nastavuje proud zkrat, který se vypočítá podle vzorce: Ikz (A) \u003d 0,5 / R1 (Ohm)

Integrovaný střídač napětí na čipu ICL7660
Integrovaný střídač napětí, účinnost - 98%.
Dva izolované převodníky založené na čipech DC-102 a DC-203
Dva izolované měniče napětí DA1 a DA2, zapojené podle „neizolovaného“ obvodu se společnou „zemí“.

Bipolární stabilizovaný měnič napětí
Indukčnost primární vinutí transformátor T1 - 22 μH, poměr závitů primárního vinutí ke každému sekundárnímu - 1: 2,5.
MAX734 stabilizovaný boost převodník
Typické schéma stabilizovaného boost převodníku na čipu MAXIM.
Nestandardní aplikace čipu MAX232
Tento čip obvykle slouží jako ovladač RS-232. Násobení napětí se získá faktorem 1,6 ... 1,8.
Čínský pulzní trh DC-DC měniče pěkně široký. A při toulkách po prostranstvích známého AliExpressu jsem narazil na malý, levný, ale zároveň docela výkonný převodník. Je třeba hned říci, že pro komunikační účely je jako každý pulsní měnič omezený, ale přesto si zaslouží velkou pozornost pro svou velikost.
Již dříve jsem psal o různých pulzních měničích, které můžete použít pro své projekty.
Ale všechny mají poměrně velké rozměry a ne vždy je vhodné je používat. Hrdina této recenze je mnohem kompaktnější, ale zároveň poskytuje podobné výkonové parametry. Deska převodníku je dodávána zabalená v antistatickém sáčku.

Ve vzhledu vypadá dítě velmi frivolně, ale nespěchejte se závěry.

Rozměry desky jsou 22 x 17 mm. V porovnání s 10 rublovou mincí.
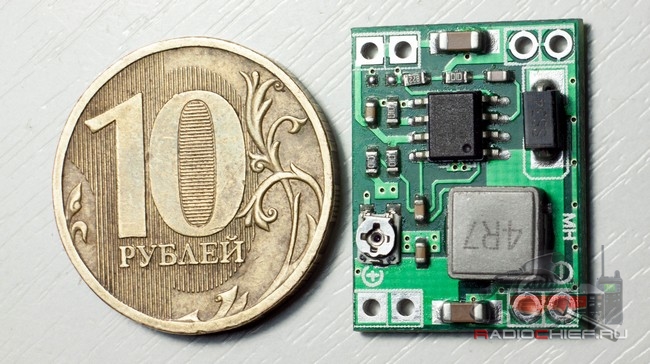
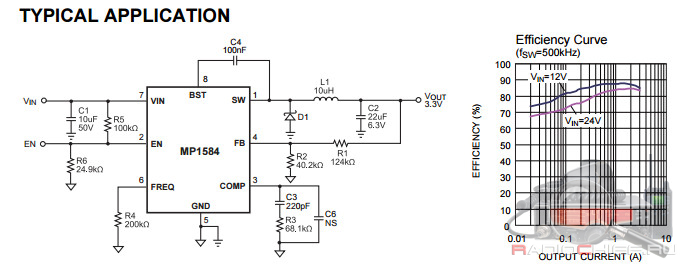
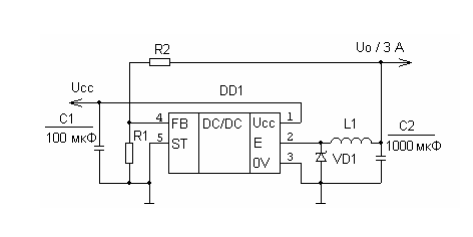
Převodník je postaven na základě specializovaného převodního čipu MP1584, jehož hlavní vlastnosti jsou:
- Vstupní napětí se může měnit od 4,5 do 28 voltů.
- Výstupní napětí je nastavitelné od 0,8 do 25 voltů.
- Vestavěný FET poskytuje provozní proud až 3A
- Pracovní frekvence je až 1,5 MHz (to vysvětluje tak malé rozměry).
- Vestavěná ochrana proti přehřátí (při dosažení 120 stupňů Celsia se převodník vypne)
- Dostatečně nízká úroveň zvlnění na vstupu a výstupu převodníku.
- Ochrana proti zkratu na výstupu.
Z nedostatků lze zaznamenat úplný nedostatek ochrany proti přepólování. A pokud si nechtěně spletete polaritu, čip MP1584 s třeskem exploduje (jeden z převodníků zemřel ve jménu vědy). 🙂

Schéma zapojení MP1584 z katalogového listu. Ve skutečnosti je podle něj sestaven náš převodník. Nechybí ani graf účinnosti v závislosti na odebíraném proudu.
Testy
Pro otestování převodníku k němu připojíme radiostanici M-Tech Legend III,

Samotný převodník je napájen laboratorním zdrojem Atten PPS3005S schopným dodávat napětí až 31 voltů a proud až 5A. Proud a napětí změříme pomocí multimetru Vichy VC8145.
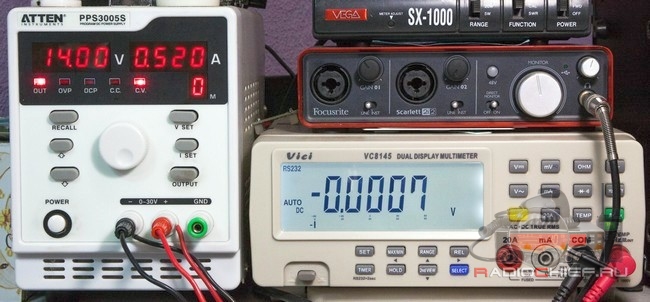
Vezmeme parametry před a za převodníkem.
Účinnost měniče z hlediska výkonu je cca 90 %, což je jen dobře. 10% ztráta je celkem přijatelná hodnota. Musíte si také pamatovat, že účinnost prudce klesá, když je rozložení vstupního a výstupního napětí menší než 3V (v dokumentaci méně než 5). Takže účinnost našeho dítěte je ještě vyšší než u starších bratrů.
Změřme úroveň zvlnění na vstupu a výstupu převodníku při standardní zátěži v podobě radiostanice M-Tech Legend III. Signál na vstupu a na výstupu vyšetříme pomocí osciloskopu Atten ADS1102CAL. Hlavním sledovaným parametrem je dV (amplituda pulzace mezi kurzory CurA a CurB).
Zvlnění na vstupu (příjem)
Zvlnění výstupu (příjem)
Vstupní zvlnění (přenos)
Výstupní zvlnění (přenos)
Ve srovnání s podobnými, ale více nízkofrekvenčními měniči vypadá docela dobře.
Teplotní režim
Zkoumáme měnič na zahřívání během provozu.
Pohotovostní režim, odběr proudu 294mA

Po 1 minutě vysílání je odběr proudu 1,55A.
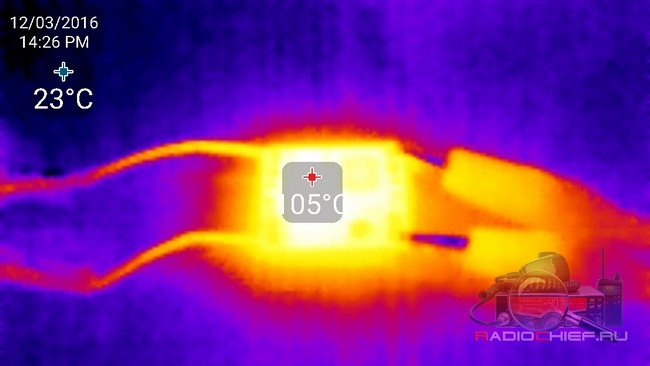
Jak je vidět, nejvíce se zahřál samotný čip převodníku. Naše miminko to má samozřejmě těžké, ale obecně v testu prošlo.
Rušení
Dokumentace k MP1584 říká: Přepnutím na 1,5 MHz je MP1584 schopen zabránit problémům s EMI (elektromagnetickým rušením), jako jsou ty, které se vyskytují v AM rádiu a ADSL aplikacích. Co to znamená v překladu: Vzhledem k tomu, že ke konverzi dochází na frekvenci 1,5 MHz, MP1584 by neměl generovat elektromagnetický šum, který způsobuje problémy, když transceivery používají amplitudovou modulaci a technologii ADSL. Podle mých zkušeností rádio M-Tech Legend III při připojení přes tento převodník nevykazovalo žádný znatelný pokles citlivosti. A přesto, s ohledem na principy fungování pulzních měničů, nedoporučuji jej používat k napájení citlivých komunikačních zařízení. Kompaktní velikost převodníku umožňuje jeho umístění i uvnitř stanice, není však známo, jak moc to nepříznivě ovlivní citlivost přijímače, pro ověření tohoto bodu by měly být provedeny další studie.
Výsledek
Díky tomu máme vynikající miniaturní měnič, který lze snadno použít k napájení různých zařízení, například k vybudování powerbanky na olověnou baterii, která bude nabíjet vaše mobilní zařízení. Zcela nedávno jsem měl podobný úkol, napájet zařízení pro střelbu v terénu, abych nebyl silně závislý na bateriích zabudovaných do zařízení, a převodníky na čipu MP1584 si s tímto úkolem poradily skvěle.
K1224PN1x - integrovaný obvod je převodník nízkého DC na vysoký AC a používá se k ovládání bytu zářivka. Zvýšení napětí se provádí pomocí externí indukčnosti, na které jsou generovány vysokonapěťové impulzy o frekvenci interního generátoru čerpadla. Fáze výstupního napětí je řízena generátorem přepínání fází. Frekvence každého generátoru je určena externí kapacitou. IC obsahuje: dva samooscilátory tvořící frekvenci čerpadla a spínací periodu […]
Čip 1156EU1 je sada funkčních prvků navržených k sestavení spínacího regulátoru boost, step-down nebo inverzního typu. Zařízení K1156EU1T se vyrábí v keramicko-kovovém pouzdře typ 4112.16-3 a KR1156EU1 - v plastovém pouzdře typ 283.16-2. VLASTNOSTI Navrženo pro buck, boost a invert spínání regulátorů Nastavení výstupního napětí 1,25…40V Výstup impulsní proud………..<1,5А Входное напряжение ….2,5…40В […]
K1290EKxx, K1290EF1xx je snižující spínaný stabilizátor napětí pro zátěž do 3A, určený pro provoz v rozsahu teplot skříně minus 10 ... + 85 ° C (K1290ExxP) a minus 60 ... + 125 ° C (K1290ExxX). Pevné výstupní napětí: 3,3 V - K1290EK3,3 (A, B) P, K1290EK3,3X, 5 V - K1290EK5 (A, B) P, K1290EK5X, 12 V - K1290EK12 (A, B) P, 15 V - K1290EK15 A,B) VLASTNOSTI Programovatelné výstupní napětí od 1,2 V do […]
Motorola UA78S40 a National Semionductor LM78S40 jsou integrované obvody pro všeobecné spínací převodníky. Mikroobvod UA78S40 (LM78S40) umožňuje vytvářet pulsní stabilizované převodníky buck, boost a invertní polarity. Převodník na čipu UA78S40 má široký rozsah vstupního a výstupního napětí. Vstupní napětí se může měnit od 2,5 do 40V, výstupní napětí od 1,5 do 40V. Schottkyho dioda 1N5822 v […]
Regulátor spínacího napětí LM2576HV-ADJ (regulátor nastavitelné šířky impulzu Blow-Down Pulse Width (PWM)) má široký nastavitelný rozsah výstupního napětí od 1,2V do 50V s maximálním výstupním proudem 3A. Protože stabilizátor pracuje v pulzním režimu, má vysokou účinnost a je obvykle vybaven malým radiátorem o ploše nejvýše 100 cm2. Zařízení má tepelnou ochranu a […]
Na obrázku je schéma jednoduchého měniče napětí. IC CD4047 pracuje v režimu nestabilního multivibrátoru, z jehož výstupu v protifázi jde signál do tranzistorů MOSFET IRFZ44, jejichž zátěž je normální (síťový transformátor s vinutími zapojenými opačně, kde je vinutí 220 se stává sekundární) 60-100 W zvyšovací transformátor s primárním vinutím 2 * 12V a odbočkou ze středu.
IC CAT3603 poskytuje 30 mA na kanál a pracuje se vstupním napětím 3 ... 5,5 V. Klidový proudový odběr mikroobvodu je extrémně malý, 0,1 mA, což umožňuje jeho napájení běžnou baterií. Pracovní frekvence převodu je 1MHz, účinnost převodníku je 90%. Je zde ochrana výstupu před zkratem. Výstupní proud mikroobvodu je regulován pomocí odporu R. Tabulka ukazuje hodnoty odporu v závislosti na […]

Frekvenční měniče
Od konce 60. let 20. století se frekvenční měniče dramaticky změnily, především v důsledku rozvoje mikroprocesorových a polovodičových technologií a také v důsledku jejich zlevňování.
Základní principy frekvenčních měničů však zůstaly stejné.
Struktura frekvenčních měničů zahrnuje čtyři hlavní prvky:
Rýže. 1. Blokové schéma frekvenčního měniče
1. Usměrňovač generuje pulzující stejnosměrné napětí, když je připojen k jednofázovému/třífázovému zdroji střídavého proudu. Usměrňovače existují ve dvou hlavních typech – řízené a neřízené.
2. Mezilehlý řetězec jednoho ze tří typů:
a) přeměna napětí usměrňovače na stejnosměrný proud.
b) stabilizace nebo vyhlazení zvlnění stejnosměrného napětí a jeho přivedení do střídače.
c) převod konstantního stejnosměrného napětí usměrňovače na měnící se střídavé napětí.
3. Invertor, který tvoří frekvenci napětí elektromotoru. Některé střídače mohou také převádět pevné stejnosměrné napětí na proměnlivé střídavé napětí.
4. Elektronický řídicí obvod, který vysílá signály do usměrňovače, meziobvodu a měniče a přijímá signály z těchto prvků. Konstrukce řízených prvků závisí na konstrukci konkrétního frekvenčního měniče (viz obr. 2.02).
Společné pro všechny frekvenční měniče je, že všechny řídicí obvody řídí polovodičové prvky měniče. Frekvenční měniče se liší spínacím režimem používaným k regulaci napájecího napětí motoru.
Na Obr. 2, který ukazuje různé principy konstrukce / ovládání převodníku, se používá následující označení:
1 - řízený usměrňovač,
2- neřízený usměrňovač,
3- meziobvod měnícího se stejnosměrného proudu,
4- Meziobvod konstantního napětí DC
5- meziobvod měnícího se stejnosměrného proudu,
6- invertor s amplitudově-pulzní modulací (AIM)
7- invertor s pulzně šířkovou modulací (PWM)
Proudový měnič (IT) (1+3+6)
Převodník s amplitudově-pulzní modulací (AIM) (1+4+7) (2+5+7)
PWM převodník (PWM/VVCplus) (2+4+7)

Rýže. 2. Různé principy konstrukce/řízení frekvenčních měničů
Pro úplnost je třeba zmínit přímé měniče, které nemají meziobvod. Takové měniče se používají ve výkonovém rozsahu megawattů k vytvoření nízkofrekvenčního napájecího napětí přímo ze sítě 50 Hz, přičemž jejich maximální výstupní frekvence je asi 30 Hz.
Usměrňovač
Síťové napájecí napětí je třífázové nebo jednofázové střídavé napětí s pevnou frekvencí (například 3x400V/50Hz nebo 1x240V/50Hz); charakteristiky těchto napětí jsou znázorněny na obrázku níže.
Rýže. 3. Jednofázové a třífázové střídavé napětí
Na obrázku jsou všechny tři fáze od sebe v čase posunuty, fázové napětí neustále mění směr a frekvence udává počet period za sekundu. Frekvence 50 Hz znamená, že za sekundu je 50 period (50 x T), tzn. jedna perioda trvá 20 milisekund.
Usměrňovač frekvenčního měniče je postaven buď na diodách, nebo na tyristorech, případně na jejich kombinaci. Usměrňovač postavený na diodách je neřízený a na tyristorech je řízený. Při použití diod i tyristorů je usměrňovač polořízený.
Neřízené usměrňovače
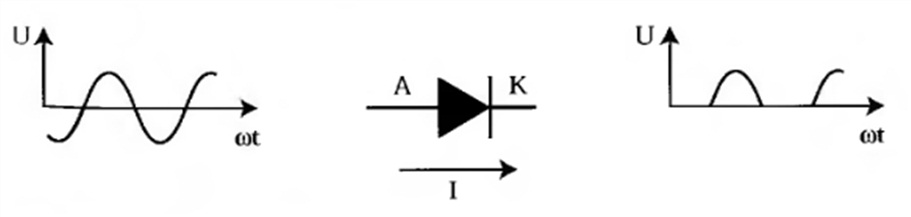
Rýže. 4. Provozní režim diody.
Diody umožňují proudění proudu pouze jedním směrem: od anody (A) ke katodě (K). Stejně jako u některých jiných polovodičových zařízení nelze velikost proudu diody ovládat. Střídavé napětí je diodou přeměněno na pulzující stejnosměrné napětí. Pokud je neřízený třífázový usměrňovač napájen třífázovým střídavým napětím, pak bude v tomto případě pulzovat i stejnosměrné napětí.

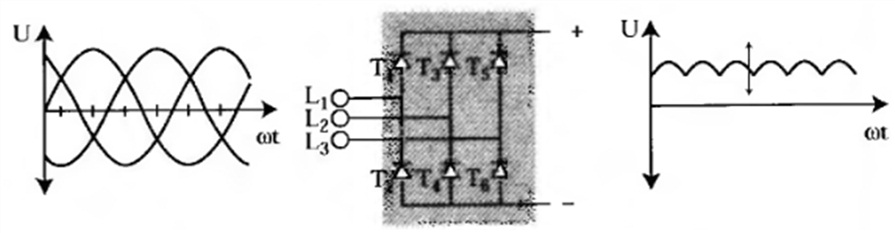
Rýže. 5. Neřízený usměrňovač
Na Obr. 5 znázorňuje neřízený třífázový usměrňovač obsahující dvě skupiny diod. Jednu skupinu tvoří diody D1, D3 a D5. Další skupinu tvoří diody D2, D4 a D6. Každá dioda vede proud po třetinu doby cyklu (120°). V obou skupinách vedou diody proud v určité sekvenci. Období, během kterých obě skupiny pracují, jsou mezi sebou posunuty o 1/6 času období T (60°).
Diody D1,3,5 jsou otevřené (vodivé), když je na ně přiloženo kladné napětí. Pokud napětí fáze L dosáhne kladné špičkové hodnoty, pak je dioda D otevřená a svorka A přijme napětí fáze L1 Další dvě diody budou ovlivněny zpětnými napětími U L1-2 a U L1-3
Totéž se děje ve skupině diod D2,4,6. V tomto případě svorka B přijímá záporné fázové napětí. Pokud fáze L3 v tuto chvíli dosáhne záporné meze, dioda D6 je otevřená (vodivá). Obě další diody jsou ovlivněny zpětnými napětími U L3-1 a U L3-2
Výstupní napětí neřízeného usměrňovače se rovná rozdílu napětí mezi těmito dvěma skupinami diod. Průměrná hodnota zvlněného stejnosměrného napětí je 1,35 x síťové napětí.
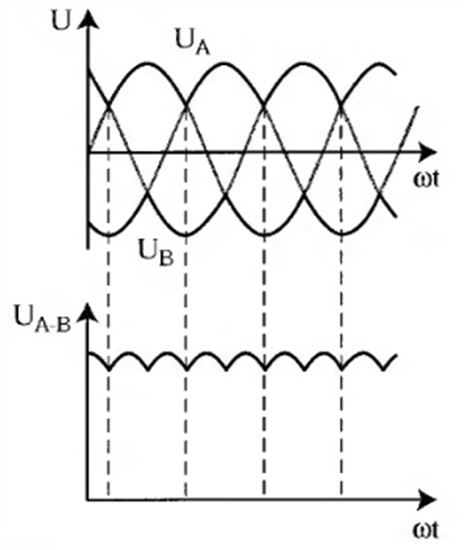
Rýže. 6. Výstupní napětí neřízeného třífázového usměrňovače
Řízené usměrňovače
V řízených usměrňovačích jsou diody nahrazeny tyristory. Stejně jako dioda propouští tyristor proud pouze jedním směrem - od anody (A) ke katodě (K). Na rozdíl od diody má však tyristor třetí elektrodu zvanou „gate“ (G). Aby se tyristor otevřel, musí být na bránu přiveden signál. Pokud tyristorem protéká proud, tyristor jím prochází, dokud se proud nestane nulovým.
Proud nelze přerušit přivedením signálu na bránu. Tyristory se používají jak v usměrňovačích, tak ve střídačích.
Na hradlo tyristoru je přiveden řídicí signál a, který je charakterizován zpožděním vyjádřeným ve stupních. Tyto stupně způsobují zpoždění mezi okamžikem, kdy napětí projde nulou, a časem, kdy je tyristor otevřený.

Rýže. 7. Provozní režim tyristoru
Je-li úhel a v rozsahu od 0° do 90°, pak je tyristorový obvod použit jako usměrňovač, a pokud je v rozsahu od 90° do 300°, pak jako střídač.
Rýže. 8. Řízený třífázový usměrňovač
Řízený usměrňovač je v podstatě stejný jako neřízený, až na to, že tyristor je řízen signálem a a začíná vodit od okamžiku, kdy běžná dioda začne vodit, až do okamžiku, který je 30° za nulovým bodem napětí.
Úprava hodnoty a umožňuje změnit velikost usměrněného napětí. Řízený usměrňovač generuje konstantní napětí, jehož průměrná hodnota je 1,35 x síťové napětí x cos α
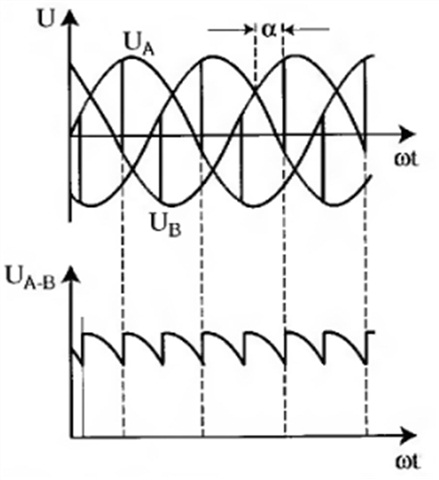
Rýže. 9. Výstupní napětí řízeného třífázového usměrňovače
Ve srovnání s neřízeným usměrňovačem má řízený usměrňovač výraznější ztráty a vnáší do napájecí sítě vyšší šum, protože při kratší době průchodu tyristoru odebírá usměrňovač ze sítě více jalového proudu.
Výhodou řízených usměrňovačů je jejich schopnost vracet energii do napájecí sítě.
Mezilehlý řetězec
Meziobvod lze považovat za zásobník, ze kterého může elektromotor přijímat energii přes měnič. V závislosti na usměrňovači a střídači existují tři možné principy návrhu meziobvodu.
Střídače - zdroje proudu (1-převodníky)
Rýže. 10. Meziobvod proměnného stejnosměrného proudu
V případě střídačů - proudových zdrojů obsahuje meziobvod velkou indukční cívku a je spárován pouze s řízeným usměrňovačem. Induktor převádí měnící se napětí usměrňovače na měnící se stejnosměrný proud. Napětí motoru je určeno zátěží.
Invertory - zdroje napětí (U-konvertory)

Rýže. 11. Obvod středního stejnosměrného napětí
V případě napěťových střídačů je meziobvodem filtr obsahující kondenzátor a lze jej připojit k libovolnému ze dvou typů usměrňovače. Filtr vyhlazuje pulzující stejnosměrné napětí (U21) usměrňovače.
V řízeném usměrňovači je napětí při dané frekvenci konstantní a je přiváděno do měniče jako skutečné konstantní napětí (U22) s měnící se amplitudou.
V neřízených usměrňovačích je napětí na vstupu měniče konstantní napětí s konstantní amplitudou.
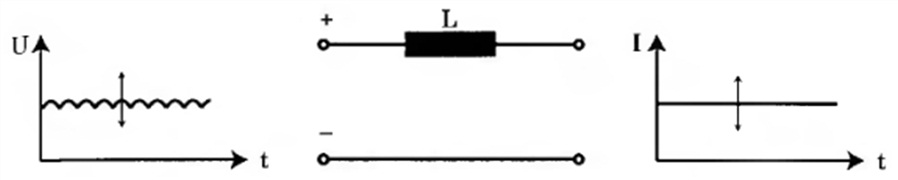
Meziobvod proměnného stejnosměrného napětí
Rýže. 12. Meziobvod proměnlivého napětí
V meziobvodech s proměnným stejnosměrným napětím je možné zapnout před filtrem chopper, jak je znázorněno na obr. 12.
Přerušovač obsahuje tranzistor, který funguje jako spínač, zapíná a vypíná napětí usměrňovače. Řídicí systém řídí chopper porovnáním měnícího se napětí za filtrem (U v) se vstupním signálem. Pokud existuje rozdíl, poměr se upraví změnou času, kdy je tranzistor zapnutý a času jeho vypnutí. Tím se mění efektivní hodnota a velikost konstantního napětí, které lze vyjádřit vzorcem
U v \u003d U x t zapnuto / (t zapnuto + t vypnuto)
Když zhášecí tranzistor otevře proudový obvod, tlumivka filtru způsobí, že napětí na tranzistoru bude nekonečně velké. Aby se tomu zabránilo, je jistič chráněn rychlou spínací diodou. Když se tranzistor otevírá a zavírá, jak je znázorněno na obr. 13, bude napětí nejvyšší v režimu 2.
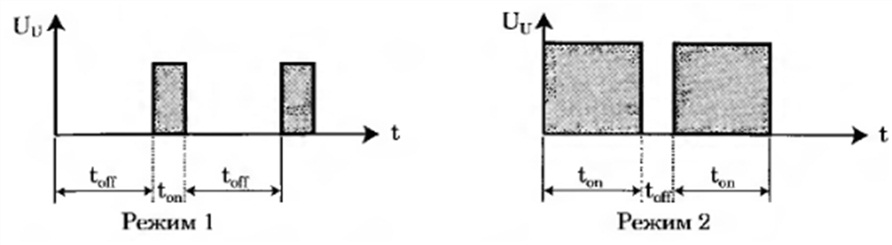
Rýže. 13. Tranzistorový jistič ovládá napětí meziobvodu
Meziobvodový filtr vyhlazuje obdélníkovou vlnu za jističem. Filtrační kondenzátor a induktor udržují konstantní napětí na dané frekvenci.
V závislosti na konstrukci může meziobvod plnit i další funkce, mezi které patří:
Odpojení usměrňovače od střídače
Snížení úrovně harmonických
Akumulace energie pro omezení přerušovaných rázů zátěže.
střídač
Měnič je posledním článkem frekvenčního měniče před elektromotorem a místem, kde dochází ke konečnému přizpůsobení výstupního napětí.
Měnič kmitočtu poskytuje normální provozní podmínky v celém rozsahu řízení přizpůsobením výstupního napětí režimu zatížení. To umožňuje udržovat optimální magnetizaci motoru.
Z meziokruhu střídač přijímá
proměnný stejnosměrný proud,
Měnící se stejnosměrné napětí popř
Konstantní stejnosměrné napětí.
Díky měniči je v každém z těchto případů elektromotoru dodávána měnící se hodnota. Jinými slovy, požadovaná frekvence napětí dodávaného do elektromotoru se vždy vytváří ve střídači. Pokud je proud nebo napětí proměnlivé, měnič generuje pouze požadovanou frekvenci. Pokud je napětí konstantní, měnič vytváří jak požadovanou frekvenci, tak požadované napětí pro motor.
I když měniče pracují různými způsoby, jejich základní struktura je vždy stejná. Hlavními prvky invertorů jsou řízená polovodičová zařízení zapojená do párů ve třech větvích.
V současné době jsou tyristory ve většině případů nahrazeny vysokofrekvenčními tranzistory, které jsou schopny se velmi rychle otevřít a zavřít. Spínací frekvence je obvykle mezi 300 Hz a 20 kHz v závislosti na použitých polovodičích.
Polovodičová zařízení v invertoru se zapínají a vypínají signály generovanými řídicím obvodem. Signály lze generovat několika různými způsoby.
Rýže. 14. Konvenční meziobvodový střídač proudu s proměnným napětím.
Běžné měniče, které spínají především meziobvodový proud měnícího se napětí, obsahují šest tyristorů a šest kondenzátorů.
Kondenzátory umožňují otevírání a zavírání tyristorů tak, že proud ve fázových vinutích je posunut o 120 stupňů a musí být přizpůsoben velikosti motoru. Při periodickém přivádění proudu na svorky motoru v sekvenci U-V, V-W, W-U, U-V... se generuje přerušované rotující magnetické pole o požadované frekvenci. I když je proud motoru téměř obdélníkový, napětí motoru bude téměř sinusové. Při zapnutí nebo vypnutí proudu však vždy dochází k napěťovým rázům.
Kondenzátory jsou odděleny od zatěžovacího proudu motoru diodami.
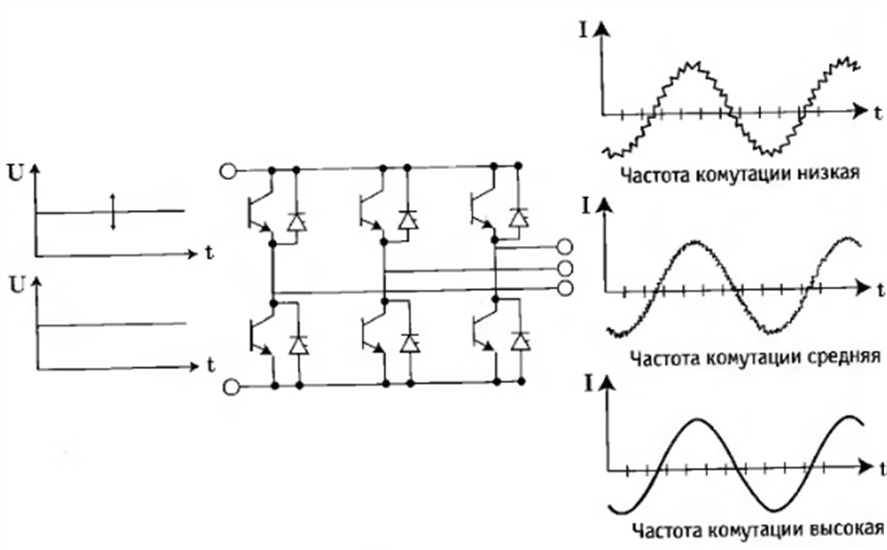
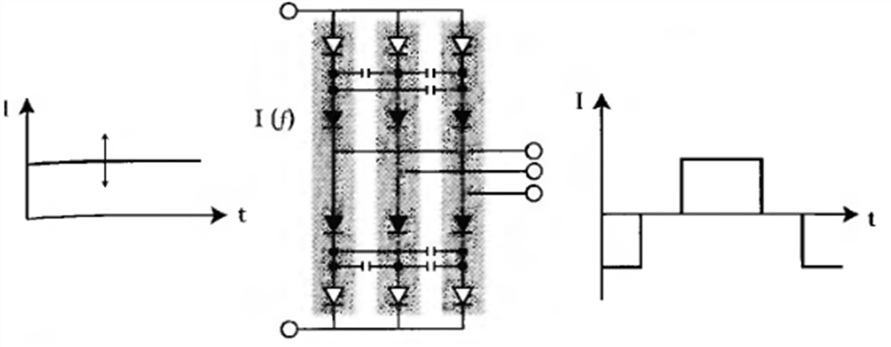
Rýže. 15. Střídač pro měnící se nebo konstantní napětí meziobvodu a závislost výstupního proudu na spínací frekvenci střídače
Střídače s proměnným nebo konstantním napětím meziobvodu obsahují šest spínacích prvků a bez ohledu na typ použitých polovodičových součástek fungují téměř stejně. Řídicí obvod otevírá a zavírá polovodičová zařízení pomocí několika různých metod modulace, čímž mění výstupní frekvenci frekvenčního měniče.
První způsob je pro změnu napětí nebo proudu v meziobvodu.
Intervaly, během kterých jsou jednotlivé polovodiče otevřené, jsou uspořádány v sekvenci používané k získání požadované výstupní frekvence.
Tato spínací sekvence polovodičových součástek je řízena velikostí měnícího se napětí nebo proudu meziobvodu. Díky použití napěťově řízeného oscilátoru frekvence vždy sleduje amplitudu napětí. Tento typ řízení invertoru se nazývá pulzní amplitudová modulace (PAM).
Pro pevné napětí meziobvodu se používá jiný základní způsob. Napětí motoru se mění přivedením napětí meziobvodu na vinutí motoru po delší nebo kratší dobu.
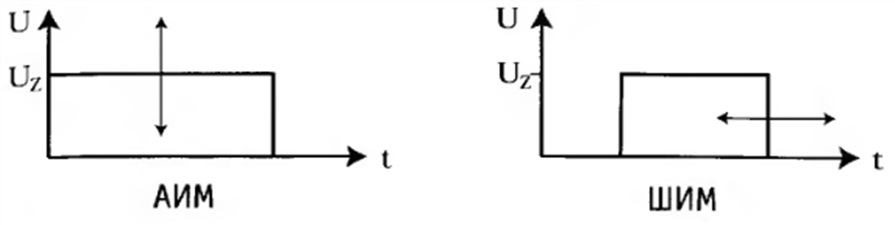
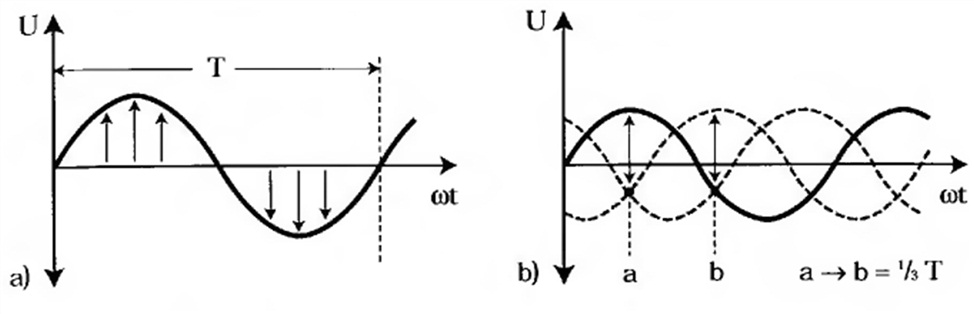
Rýže. 16 Amplitudová a pulzně šířková modulace
Frekvence se mění změnou napěťových impulsů podél časové osy - kladně během jedné půlperiody a záporně během druhé.
Protože tato metoda mění dobu trvání (šířku) napěťových impulsů, nazývá se modulace šířky impulsů (PWM). Modulace PWM (a související metody, jako je sinusově řízená PWM) je nejběžnějším způsobem pohonu měniče.
Při PWM modulaci řídící obvod určuje spínací časy polovodičových součástek na průsečíku pilového napětí a superponovaného sinusového referenčního napětí (sinusově řízené PWM). Dalšími slibnými metodami modulace PWM jsou metody modifikované pulzně šířkové modulace, jako je WC a WC plus vyvinuté společností Danfoss Corporation.
tranzistory
Protože tranzistory mohou spínat vysokou rychlostí, elektromagnetické rušení, ke kterému dochází při "pulsování" (magnetizace motoru), je sníženo.
Další výhodou vysoké spínací frekvence je flexibilita modulace výstupního napětí frekvenčního měniče, která umožňuje výrobu sinusového proudu motoru, přičemž řídicí obvod musí jednoduše otevírat a zavírat tranzistory měniče.
Spínací frekvence měniče je dvousečná zbraň, protože vysoké frekvence mohou vést k zahřívání motoru a vysokým napěťovým špičkám. Čím vyšší je spínací frekvence, tím vyšší jsou ztráty.
Nízká spínací frekvence může mít naopak za následek silný akustický hluk.
Vysokofrekvenční tranzistory lze rozdělit do tří hlavních skupin:
Bipolární tranzistory (LTR)
Unipolární MOSFETy (MOS-FET)
Bipolární tranzistory s izolovaným hradlem (IGBT)
IGBT tranzistory jsou v současnosti nejpoužívanější, protože kombinují budicí vlastnosti MOS-FET tranzistorů s výstupními vlastnostmi LTR tranzistorů; navíc mají správný výkonový rozsah, vhodnou vodivost a spínací frekvenci, což značně zjednodušuje ovládání moderních frekvenčních měničů.
V případě IGBT jsou jak prvky invertoru, tak i ovládací prvky invertoru umístěny v lisovaném modulu zvaném „Intelligent Power Module“ (IPM).
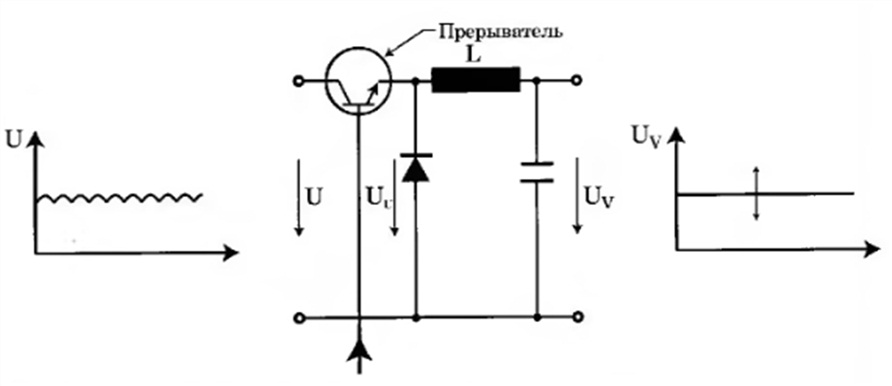
Pulzní amplitudová modulace (AIM)
Pulsně-amplitudová modulace se používá pro frekvenční měniče s proměnným napětím meziobvodu.
U frekvenčních měničů s neřízenými usměrňovači je amplituda výstupního napětí tvořena mezijističem, a pokud je usměrňovač řízen, získává se amplituda přímo.
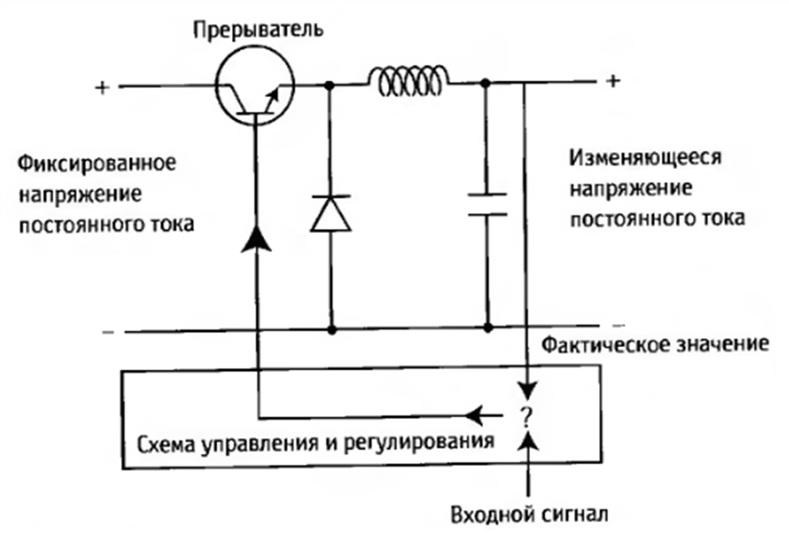
Rýže. 20. Generování napětí v frekvenčních měničích s jističem v meziobvodu
Tranzistor (přerušovač) na Obr. 20 se odemyká nebo zamyká řídicím a regulačním obvodem. Spínací časy závisí na jmenovité hodnotě (vstupní signál) a měřeném napěťovém signálu (skutečná hodnota). Skutečná hodnota se měří na kondenzátoru.
Induktor a kondenzátor fungují jako filtr, který vyhlazuje zvlnění napětí. Špičkové napětí závisí na době otevření tranzistoru, a pokud se jmenovité a skutečné hodnoty od sebe liší, přerušovač pracuje, dokud není dosaženo požadované úrovně napětí.
Ovládání frekvence
Frekvence výstupního napětí je měničem během periody měněna a polovodičová spínací zařízení pracují mnohokrát během periody.
Délku období lze upravit dvěma způsoby:
1.Přímo zadejte příp
2.Použití proměnného stejnosměrného napětí, které je úměrné vstupnímu signálu.

Rýže. 21a. Řízení frekvence s napětím meziobvodu
Pulse Width Modulation je nejběžnějším způsobem generování třífázového napětí s vhodnou frekvencí.
U pulzně šířkové modulace je tvorba celkového napětí meziobvodu (síť ≈ √2 x U) určena dobou trvání a frekvencí spínání výkonových prvků. Opakovací frekvence pulzů PWM mezi zapnutím a vypnutím je proměnná a umožňuje regulaci napětí.
Existují tři hlavní možnosti nastavení spínacích režimů u měniče řízeného pulzně-šířkovou modulací.
1. Sinusově řízené PWM
2. Synchronní PWM
3.Asynchronní PWM
Každá větev třífázového PWM měniče může mít dva různé stavy (zapnuto a vypnuto).
Tři spínače tvoří osm možných kombinací spínání (2 3), a tedy osm digitálních vektorů napětí na výstupu měniče nebo na vinutí statoru připojeného motoru. Jak je znázorněno na Obr. 21b jsou tyto vektory 100, 110, 010, 011, 001, 101 v rozích opsaného šestiúhelníku s použitím vektorů 000 a 111 jako nul.
![]()
V případě spínacích kombinací 000 a 111 je na všech třech výstupních svorkách měniče vytvořen stejný potenciál - buď kladný nebo záporný vzhledem k meziobvodu (viz obr. 21c). U elektromotoru to znamená efekt blízký zkratu svorek; Napětí 0 V je rovněž přivedeno na vinutí motoru.
Sinusově řízené PWM
U sinusově řízeného PWM je k buzení každého výstupu měniče použito sinusové referenční napětí (Us) Doba trvání periody sinusového napětí odpovídá požadované základní frekvenci výstupního napětí. Na tři referenční napětí je přivedeno pilovité napětí (U D), viz obr. 22.

Rýže. 22. Princip činnosti sinusově řízené PWM (se dvěma referenčními napětími)
Při křížení pilového napětí a sinusového referenčního napětí se polovodičová zařízení invertorů buď otevřou nebo zavřou.
Křižovatky jsou určeny elektronickými prvky řídící desky. Pokud je pilové napětí větší než sinusové napětí, pak se při poklesu pilového napětí mění výstupní impulsy z kladných na záporné (nebo ze záporných na kladné), takže výstupní napětí frekvenčního měniče je určeno napětím meziobvodu. .
Výstupní napětí je měněno poměrem mezi dobou trvání otevřeného a zavřeného stavu a tento poměr lze měnit pro získání požadovaného napětí. Amplituda záporných a kladných napěťových impulsů tedy vždy odpovídá polovině napětí meziobvodu.
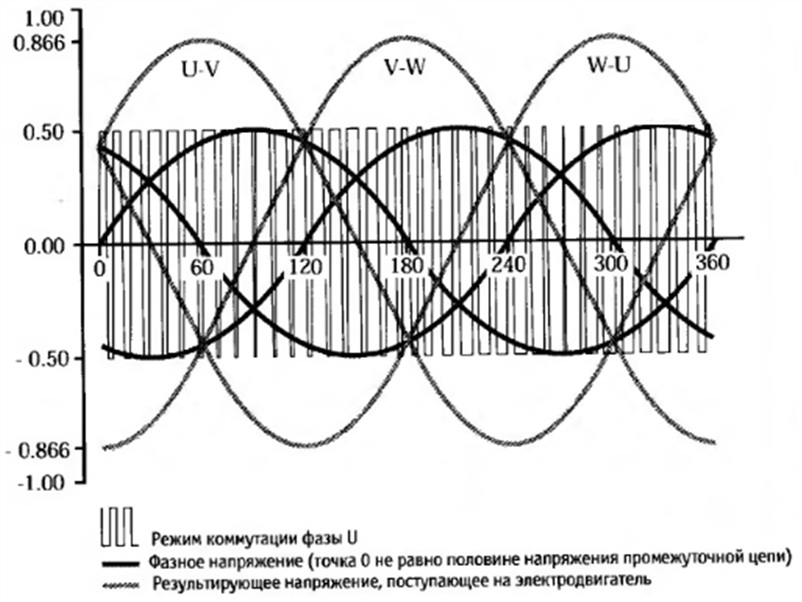
Rýže. 23. Výstupní napětí sinusově řízené PWM
Při nízkých frekvencích statoru se doba vypnutí prodlužuje a může být tak dlouhá, že není možné udržet frekvenci pilového napětí.
Tím se prodlouží doba bez napětí a motor poběží nerovnoměrně. Abyste tomu zabránili, při nízkých frekvencích můžete zdvojnásobit frekvenci pilového napětí.
Fázové napětí na výstupních svorkách frekvenčního měniče odpovídá polovině napětí meziobvodu dělené √2, tzn. rovnající se polovině síťového napětí. Síťové napětí na výstupních svorkách je √3násobek napětí mezi dvěma sítěmi, tzn. rovná se síťovému napětí vynásobenému 0,866.
Měnič řízený PWM, který pracuje výhradně s modulovaným sinusovým referenčním napětím, může dodávat napětí rovnající se 86,6 % jmenovitého napětí (viz obrázek 23).
Při použití čistě sinusové modulace nemůže výstupní napětí frekvenčního měniče dosáhnout napětí motoru, protože výstupní napětí bude také o 13 % nižší.
Potřebné přídavné napětí lze však získat snížením počtu impulsů, když frekvence překročí asi 45 Hz, ale tato metoda má některé nevýhody. Způsobuje zejména skokovou změnu napětí, která vede k nestabilnímu chodu elektromotoru. Sníží-li se počet pulsů, zvyšují se vyšší harmonické na výstupu frekvenčního měniče, což zvyšuje ztráty v motoru.
Dalším způsobem, jak tento problém vyřešit, je použití jiných referenčních napětí namísto tří sinusových. Tato napětí mohou mít jakýkoli tvar (například lichoběžníkový nebo stupňovitý).
Například jedna společná napěťová reference používá třetí harmonickou sinusové napěťové reference. Pro získání takového spínacího režimu polovodičových součástek střídače, který zvýší výstupní napětí frekvenčního měniče, je možné zvýšit amplitudu sinusového referenčního napětí o 15,5 % a přidat k němu třetí harmonickou.
Synchronní PWM
Hlavním problémem při použití sinusově řízené metody PWM je potřeba určit optimální hodnoty spínacího času a úhlu pro napětí během daného období. Tyto spínací časy musí být nastaveny tak, aby bylo povoleno pouze minimum vyšších harmonických. Tento spínací režim je zachován pouze pro daný (omezený) frekvenční rozsah. Provoz mimo tento rozsah vyžaduje použití jiného způsobu spínání.
Asynchronní PWM
Potřeba orientace pole a odezvy systému z hlediska řízení točivého momentu a rychlosti třífázových střídavých pohonů (včetně servopohonů) vyžaduje skokovou změnu amplitudy a úhlu napětí měniče. Použití „normálního“ nebo synchronního spínacího režimu PWM neumožňuje krokování amplitudy a úhlu napětí měniče.
Jedním ze způsobů, jak splnit tento požadavek, je asynchronní PWM, kde namísto synchronizace modulace výstupního napětí s výstupní frekvencí, jak se obvykle dělá pro snížení harmonických v motoru, je modulován cyklus řízení vektorového napětí, což vede k synchronní vazbě s výstupní frekvencí. .
Existují dvě hlavní varianty asynchronního PWM:
SFAVM (Asynchronní vektorová modulace orientovaná na tok statoru = (synchronní vektorová modulace orientovaná na tok statoru)
60° AVM (Asynchronous Vector Modulation = asynchronní vektorová modulace).
SFAVM je metoda modulace prostorovým vektorem, která umožňuje, aby se napětí, amplituda a úhel měniče náhodně, ale skokově měnily během doby komutace. Tím je dosaženo zvýšených dynamických vlastností.
Hlavním účelem použití této modulace je optimalizace toku statoru pomocí statorového napětí při současném snížení zvlnění točivého momentu, protože úhlová odchylka závisí na spínací sekvenci a může způsobit zvýšení zvlnění točivého momentu. Proto musí být komutační sekvence vypočtena tak, aby se minimalizovala odchylka vektorového úhlu. Přepínání mezi napěťovými vektory je založeno na výpočtu požadované dráhy magnetického toku ve statoru motoru, který zase určuje moment.
Nevýhodou předchozích, konvenčních PWM napájecích systémů byla odchylka amplitudy vektoru magnetického toku statoru a úhlu magnetického toku. Tyto odchylky nepříznivě ovlivnily točivé pole (moment) ve vzduchové mezeře motoru a způsobily zvlnění točivého momentu. Vliv odchylky amplitudy U je zanedbatelný a lze jej dále snížit zvýšením spínací frekvence.
Generování napětí motoru
Stabilní provoz odpovídá regulaci vektoru napětí stroje U wt tak, aby opisoval kružnici (viz obr. 24).
Vektor napětí je charakterizován velikostí napětí elektromotoru a rychlostí otáčení, která odpovídá pracovní frekvenci v uvažovaném časovém okamžiku. Napětí motoru je tvořeno vytvářením průměrných hodnot pomocí krátkých impulsů ze sousedních vektorů.
Metoda Danfoss SFAVM má mimo jiné následující vlastnosti:
Vektor napětí lze upravit v amplitudě a fázi bez odchýlení od nastaveného cíle.
Přepínací sekvence vždy začíná 000 nebo 111. To umožňuje, aby vektor napětí měl tři spínací režimy.
Průměrná hodnota vektoru napětí se získá pomocí krátkých impulsů sousedních vektorů a také nulových vektorů 000 a 111.
Schéma ovládání
Řídicí obvod nebo řídicí deska je čtvrtým hlavním prvkem frekvenčního měniče, který je navržen tak, aby řešil čtyři důležité úkoly:
Řízení polovodičových prvků frekvenčního měniče.
Komunikace mezi frekvenčními měniči a periferními zařízeními.
Sběr dat a generování chybových hlášení.
Provádění ochranných funkcí frekvenčního měniče a elektromotoru.
Mikroprocesory zvýšily rychlost řídicího obvodu, výrazně rozšířily záběr pohonů a snížily počet nutných výpočtů.
Mikroprocesor je zabudován do frekvenčního měniče a je vždy schopen určit optimální průběh impulsů pro každý provozní stav.
Řídicí obvod pro frekvenční měnič AIM
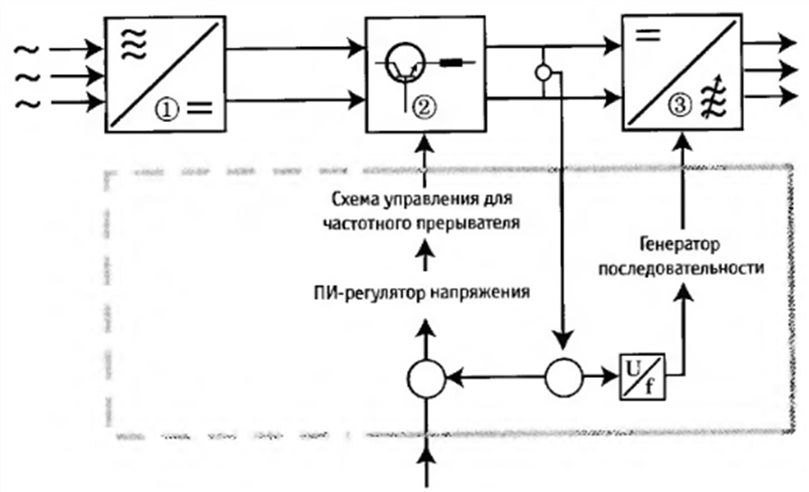
Rýže. 25 Princip činnosti řídicího obvodu pro meziobvod ovládaný jističem.
Na Obr. 25 ukazuje frekvenční měnič s řízením AIM a mezijističem. Řídicí obvod řídí převodník (2) a střídač (3).
Řízení je založeno na okamžité hodnotě napětí meziobvodu.
Napětí meziobvodu pohání obvod, který funguje jako čítač adres paměti pro ukládání dat. Paměť ukládá výstupní sekvence pro vzor impulsů měniče. Při zvýšení napětí meziobvodu je počítání rychlejší, sekvence končí dříve a výstupní frekvence se zvyšuje.
S ohledem na řízení chopperu se nejprve porovná napětí meziobvodu se jmenovitou hodnotou referenčního signálu napětí. Očekává se, že tento napěťový signál poskytne správné výstupní napětí a frekvenci. Pokud se změní referenční signál a signál meziobvodu, PI regulátor informuje obvod, že je třeba změnit dobu cyklu. To způsobí, že se napětí meziobvodu přizpůsobí referenčnímu signálu.
Běžným způsobem modulace pro řízení frekvenčního měniče je pulzní amplitudová modulace (PAM). Pulse Width Modulation (PWM) je modernější metoda.
Ovládání pole (vektorové ovládání)
Vektorové řízení lze organizovat několika způsoby. Hlavním rozdílem mezi metodami jsou kritéria, která se používají při výpočtu hodnot aktivního proudu, magnetizačního proudu (magnetického toku) a točivého momentu.
Při porovnávání stejnosměrných motorů a třífázových asynchronních motorů (obr. 26) jsou identifikovány určité problémy. Při stejnosměrném proudu jsou parametry důležité pro generování točivého momentu - magnetický tok (F) a proud kotvy - pevně dané ve vztahu k velikosti a umístění fáze a jsou určeny orientací budicích vinutí a polohou uhlíku. kartáče (obr. 26a).
U stejnosměrného motoru jsou proud kotvy a proud, který vytváří magnetický tok, umístěny v pravém úhlu k sobě a jejich hodnoty nejsou příliš velké. U asynchronního elektromotoru závisí poloha magnetického toku (F) a rotorového proudu (I,) na zatížení. Na rozdíl od stejnosměrného motoru také nelze fázové úhly a proud přímo určit z velikosti statoru.

Rýže. 26. Srovnání stejnosměrného stroje a střídavého indukčního stroje
Pomocí matematického modelu je však možné vypočítat točivý moment ze vztahu mezi magnetickým tokem a proudem statoru.
Z naměřeného proudu statoru (l s) se rozlišuje složka (l w), která vytváří moment s magnetickým tokem (F) v pravém úhlu mezi těmito dvěma proměnnými (l c). Tím vzniká magnetický tok elektromotoru (obr. 27).
![]()
Rýže. 27. Výpočet proudových složek pro řízení pole
Těmito dvěma proudovými složkami lze nezávisle ovlivňovat točivý moment a magnetický tok. Vzhledem k určité složitosti výpočtů založených na dynamickém modelu elektromotoru jsou však takové výpočty cenově výhodné pouze u digitálních pohonů.
Protože je u této metody řízení buzení nezávislé na zátěži odděleno od řízení momentu, je možné dynamicky řídit indukční motor stejným způsobem jako stejnosměrný motor - za předpokladu, že existuje zpětnovazební signál. Tento způsob ovládání třífázového střídavého motoru má následující výhody:
Dobrá reakce na změny zatížení
Přesné ovládání výkonu
Plný točivý moment při nulových otáčkách
Výkon je srovnatelný s výkonem stejnosměrných pohonů.
U/f a vektorové řízení toku
V posledních letech byly vyvinuty systémy řízení otáček pro třífázové motory na střídavý proud založené na dvou různých principech řízení:
normální řízení U/f nebo řízení SCALAR a řízení vektoru toku.
Obě metody mají své výhody v závislosti na konkrétním výkonu (dynamice) pohonu a požadavcích na přesnost.
U/f regulace má omezený rozsah regulace otáček (cca 1:20) a při nízké rychlosti je potřeba jiný princip regulace (kompenzace). Pomocí této metody je poměrně snadné přizpůsobit frekvenční měnič motoru a regulace je imunní vůči okamžitým změnám zátěže v celém rozsahu otáček.
U pohonů řízených tokem musí být frekvenční měnič přesně nakonfigurován pro motor, což vyžaduje podrobnou znalost parametrů motoru. Pro příjem zpětnovazebního signálu jsou také potřeba další komponenty.
Některé výhody tohoto typu ovládání:
Rychlá odezva na změny rychlosti a široký rozsah otáček
Lepší dynamická odezva na změny směru
V celém rozsahu otáček je zajištěn jediný princip ovládání.
Pro uživatele by byla nejlepším řešením kombinace nejlepších vlastností obou principů. Je zřejmé, že je vyžadována stupňovitá stabilita zatížení/odlehčení v celém rozsahu otáček, což je obvykle silná stránka řízení U/f, a rychlá odezva na změny referenční rychlosti (jako při řízení v terénu).
Při návrhu elektronických zařízení je často vyžadován napájecí zdroj s různým výstupním napětím. DC-DC měniče na spínacích kondenzátorech jsou široce používány v moderních zařízeních, což umožňuje generovat požadované napětí z jednoho zdroje energie. Článek pojednává o principech činnosti takových měničů, jejich technických vlastnostech a aplikacích.
Podívejme se na princip fungování převodníku na příkladu rozšířeného mikroobvodu ICL7660 / MAX1044 s rozšířenou funkčností. Čip MAX1044 se od ICL7660 liší přítomností Boost vstupu (zvýšení frekvence interního oscilátoru). Blokové schéma čipu ICL7660 je na obr. 1. Obr.
Obvod obsahuje čtyři výkonové MOS spínače řízené logickými prvky a napěťový posunovač, které pracují na frekvenci získané dělením dvěma frekvencemi hlavního RC oscilátoru. To umožňuje generovat řídicí impulsy s požadovanou "meandrovou" charakteristikou a optimalizovat spotřebu hlavního RC oscilátoru, jehož pracovní frekvence bez vnějších prvků je 10 kHz. Pro zajištění provozu mikroobvodu ze zdroje se sníženým napětím je nezbytný interní regulátor napětí.
Princip činnosti mikroobvodu v režimu ideálního napěťového měniče bude uvažován podle funkčního schématu na obr. 2. Obr.
Když jsou klávesy S1 a S3 zavřené a klávesy S2 a S4 jsou otevřeny během první poloviny cyklu, externí kondenzátor C1 se nabíjí ze zdroje napětí na napětí V +, a když jsou klávesy S2 a S4 zavřené a klávesy S1 a S3 jsou otevřeny během druhé poloviny cyklu, kondenzátor C1 přenáší částečně svůj náboj do externího kondenzátoru C2, čímž poskytuje napětí -V + na kolíku V OUT mikroobvodu. Uvedené hodnoty napětí odpovídají ustálenému stavu.
Energie přenesená kondenzátorem C1 v jednom cyklu je určena pomocí výrazu
![]() (1)
(1)
Jedním z hlavních ukazatelů převodníku je konverzní faktor
![]() (2)
(2)
kde U out - napětí na výstupu převodníku při zatěžovacím proudu rovném i; U out.id. - napětí na výstupu ideálního měniče (pro měnič U out.id. = -U in).
Z výrazu (2) je vidět, že vysoké hodnoty převodního koeficientu je dosaženo, když U out(i) = U out.id. , tj. při V1 = V2. Jak je však patrné z výrazu (1), v tomto případě klesá energie přenášená kondenzátorem C1, což ztěžuje zajištění vysoké hodnoty převodního koeficientu. Zvýšení energie přenášené kondenzátorem je možné zvýšením kapacity C1 nebo pracovní frekvence. V prvním případě se zvětší rozměry kondenzátoru a následně i rozměry měniče. Ve druhém případě se u reálného zařízení zvyšují energetické ztráty, což snižuje jeho účinnost.
kde P out je výkon dodávaný do zátěže; Pin - energie odebíraná ze zdroje.
Z analýzy je patrné, že při vývoji konkrétního převodníku je nutné optimalizovat hodnoty pracovní frekvence a kapacity kondenzátoru C1. K tomu je nutné zajistit možnost změny provozní frekvence v souladu s hodnotami provozních napětí a spotřebovaných proudů.
Zvažte elektrické charakteristiky mikroobvodu ICL7660, zahrnutého podle testovacího obvodu znázorněného na obr. 3.
Tabulka 1. Stručné elektrické charakteristiky mikroobvodu při V + \u003d 5V, C OSC \u003d 0
Typické závislosti elektrických charakteristik čipu ICL7660 jsou na obr. 4-8.
Uvedené závislosti umožňují zpřesnit parametry převodníku pro konkrétní hodnoty provozních napětí a odebíraných proudů.
Uvažujme typické obvody pro zapínání čipu ICL7660.
střídač napětí
Obvod pro zapnutí mikroobvodu v režimu střídače napětí je na obr. 9. Obr.

Měnič poskytuje napěťový výstup V OUT rovný -V + v rozsahu 1,5V
Výstupní impedance mikroobvodu závisí na stejnosměrném režimu a na reaktanci kondenzátoru C1.
![]() (3)
(3)
Takže pro nominální C1 \u003d 10 mikrofaradů a frekvenci f \u003d 10 kHz X C \u003d 3,18 Ohm. Pro eliminaci vlivu kondenzátoru C1 na výstupní impedanci je nutné, aby X C
Pro provoz mikroobvodu v rozsahu 1,5V
Snížená výstupní impedance
Pro snížení výstupního odporu můžete použít paralelní zapojení mikroobvodů, které je znázorněno na obr. 10.
Výstupní impedance takového obvodu závisí na počtu paralelně zapojených mikroobvodů. n a je definován pomocí výrazu.
![]() (4)
(4)
Obrázek ukazuje, že kondenzátor C1 je individuální pro každý mikroobvod a kondenzátor C2 je společný. Uvažované zahrnutí mikroobvodů umožňuje zvýšit výstupní proud, převodní faktor a účinnost měniče.
Kaskádování čipů
Pro zvýšení výstupního napětí můžete použít kaskádování mikroobvodů, znázorněné na obr. 11.
Výstupní napětí takového převodníku je -nV +. Vzhledem k povolenému rozsahu 1,5V
Zdvojovače napětí
Pro získání kladného napětí ze zdroje záporného napětí a také pro zdvojnásobení napětí se zapne mikroobvod, jak je znázorněno na obr. 12.
Na kolících 8 a 3 je generováno napětí V OUT \u003d -V - a na kolících 8 a 5 V OUT \u003d -2V -. Dioda je nezbytná pro zajištění počáteční fáze provozu mikroobvodu. V některých případech je vhodné použít spínací obvod znázorněný na obr. 13.
Výstupní napětí takového převodníku je 2V + -2VF, kde VF je úbytek napětí na diodě v propustném směru (pro křemíkové diody VF \u003d 0,5-0,7V).
Děliče napětí
Pomocí čipu ICL7660 můžete po zapnutí získat výkonný dělič napětí, jak je znázorněno na obr.14.
Kombinované zdroje napětí
Čip ICL7660 umožňuje přijímat napětí s různými hodnotami. Jedna z možností přepínání je na obr.15.
V měniči napětí znázorněném na obrázku se tvoří napětí - (V + -V F) a 2V + -2V F.
Provoz vyrovnávací paměti
Jak je vidět z výše probíraného materiálu, měniče se spínanými kondenzátory mají reverzibilní vlastnosti. To umožňuje implementovat vyrovnávací režim jejich provozu, jehož jedna z možností je znázorněna na obr.16.

Zařízení je napájeno ze zdroje V IN, který poskytuje napětí V OUT (5. výstup n-tého mikroobvodu) a V+ (8. výstup prvního mikroobvodu) - dobíjecí napětí baterie. Při výpadku napájecího napětí nebo odpojení napájení se z napětí baterie V + generuje napětí V OUT.
Změna frekvence generátoru ICL7660
Parametry uvažovaných měničů závisí na frekvenci generátoru mikroobvodů. Závislost účinnosti na frekvenci je na obr.6.
Z obrázku je patrné, že při výstupním proudu 1 mA je zajištěna vysoká účinnost při frekvencích pod 1 kHz. Při vyšších frekvencích ztráty v řídicích obvodech generátoru a výkonového spínače snižují celkovou účinnost. Pro dosažení vysoké účinnosti v tomto konkrétním případě je nutné snížit pracovní frekvenci měniče. Pracovní kmitočet lze snížit pomocí externího oscilátoru nebo připojením C OSC, jak je znázorněno na obr.3.
Jednodušší metodou je použití externího kondenzátoru, jehož kapacitu lze určit z grafu na obr. 8. Obr.
Pro výše uvažovaný případ je pracovní frekvence rovna 1 kHz dosažena připojením externího kondenzátoru s kapacitou C OSC \u003d 100pF. Při aplikaci této metody je třeba vzít v úvahu, že při C OSC větším než 1000pF je třeba zvýšit kapacitu kondenzátorů C1 a C2 na 100 mikrofaradů.
Uvažovaný způsob změny frekvence generátoru se používá u mikrovýkonových zařízení pro zajištění vysoké účinnosti měniče.
V některých případech je nutné zvýšit pracovní frekvenci měniče. V těchto případech je možné použít C1 a C2 menší kapacity a tedy menších rozměrů. Snižuje také hladinu hluku generátoru v audio systémech. Nejjednodušší způsob, jak zvýšit frekvenci, je pomocí kolíku Boost na MAX1044. Při zavřeném klíči S1 (obr. 3) se pracovní frekvence mikroobvodu zvýší 6krát.
Režim nízké spotřeby
Při provozu v pohotovostním režimu je nutné snížit spotřebu měniče. Některé mikroobvody mají SD vstup, pomocí kterého můžete snížit proudový odběr na jednotky mikroampérů. Režim nízké spotřeby lze také implementovat pomocí vstupu OSC. Možnosti implementace tohoto režimu při použití konvenčních logických prvků, logických prvků s otevřeným kolektorem (kolektorem) i těch s třetím stavem jsou na obr.17.

Mikroobvody měničů napětí na spínaných kondenzátorech vyrábí řada firem: Maxim, National Semiconductor, Microchip atd. Tyto mikroobvody mají stejný princip činnosti a liší se realizovanými funkcemi, elektrickými parametry a provedením. Nepochybným lídrem v této oblasti je Maxim, který vyrábí nejširší škálu měničových mikroobvodů. Tabulka 2 ukazuje charakteristiky některých čipů vyráběných různými společnostmi.
Tabulka 2. Stručné charakteristiky mikroobvodů.
| Typ čipu | Implementované funkce | Výstupní proud (mA) | Vstupní napětí V IN (V) | Frekvence (kHz) | Spotřeba proudu (μA) | Poznámka |
| ICL7660 TC7660 LMC7660 | -(V IN) nebo 2 (V IN) nebo ½ (V IN) | 20 | 1,5÷10 | 10 | 250 | |
| MAX889 | (-2,5 V) (-V IN) | 200 | 2,7÷5,5 | 2000 | 50000 | Vestavěná funkce vypnutí |
| MAX1680 MAX1681 | -(V IN) nebo 2 (V IN) | 125 | 2÷5,5 | 125÷200 500÷1000 | 30000 | |
| MAX680 | 2 (VIN) a -2 (VIN) | 10 | 2÷6 | 8 | 1000 | |
| MAX681 | 2 (VIN) a -2 (VIN) | 10 | 2÷6 | 8 | 1000 | Bez externích kondenzátorů |
| MAX1673 | 3B | 125 | 2÷5,5 | 350 | 16000 | |
| LM3350 | 3/2(V IN) popř 2/3 (VIN) | 50 | 1,5÷5,5 | 1600 | ||
| LM3352 | 2,5V; 3V nebo 3,3V | 200 | 2,5÷5,5 | 1000 | ||
| MAX870 | -(V IN) nebo 2 (V IN) nebo ½ (V IN) | 50 | 1,6÷5,5 | 56÷194 | 1000 | |
| MAX864 | 2 (VIN) a -2 (VIN) | 100 | 1,75÷6 | 7÷185 | 5000 | Vestavěná funkce vypnutí |
Poznámka: mikroobvody MAX, ICL - firmy MAXIM; LM, LMC - National Semiconductor; TC - Mikročip.
Tabulka ukazuje, že měniče na spínaných kondenzátorech mohou pracovat v režimech invertor, zdvojovač, dělič vstupního napětí dvěma a umožňují generovat na výstupu více napětí současně. Některé mikroobvody mají vestavěné regulátory napětí. Uvažované mikroobvody jsou široce používány v noteboocích, mobilních telefonech, pagerech, přenosných zařízeních a dalších zařízeních. V radioamatérské praxi je lze využít např. k formování multipolárních napájecích napětí pro operační zesilovače, k zajištění vyrovnávací energie elektronických zařízení z jednoho bateriového článku, k vytvoření napájecího napětí LCD apod. Malé rozměry, vysoký konverzní faktor a účinnost, absence indukčností, reverzibilní vlastnosti jsou velmi atraktivní pro použití uvažovaných měničů při vývoji různých elektronických zařízení.
Literatura
- Kompletní katalog CD Maxim verze 5.0 2001 Edition.
- Národní databáze analogových produktů a rozhraní, vydání 2001.
Doporučujeme číst
 Jarní a podzimní zálivka zahradních jahod
Jarní a podzimní zálivka zahradních jahod Jak krmit jahody během pučení, kvetení a plodování?
Jak krmit jahody během pučení, kvetení a plodování? Jakou péči potřebují pivoňky po odkvětu: potřebné postupy a doporučení pro jejich realizaci Potřebuji keř pivoňky po odkvětu seříznout
Jakou péči potřebují pivoňky po odkvětu: potřebné postupy a doporučení pro jejich realizaci Potřebuji keř pivoňky po odkvětu seříznout Kdy zasít sazenice petúnie, lobelie, begonie Jakou kapacitu zvolit pro sazenice lobelie
Kdy zasít sazenice petúnie, lobelie, begonie Jakou kapacitu zvolit pro sazenice lobelie

